
Temperature Compensation of the MEMS-Based Electrochemical Seismic Sensors

 ,
, 
 ,
,
Abstract
1. Introduction
2. Structures and Principles
2.1. Working Principles of the Elecrochemical Seismic Sensors
2.2. The Feedback Processes
2.3. Influences of Temperature on the Sensors
3. Influence of the Surrounding Temperature on the Amplitude–Frequency Curves
3.1. Test Method for Temperature Sensitivities in Laboratory
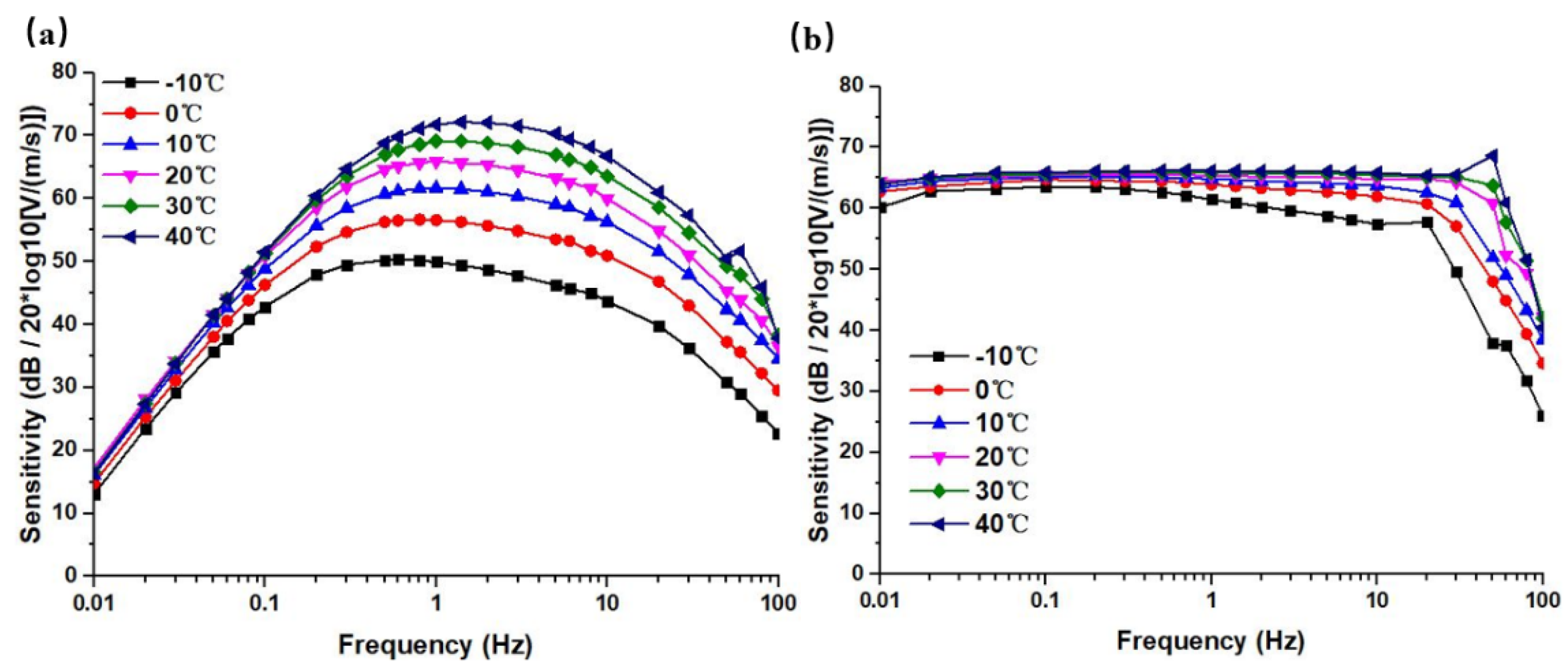
3.2. Test Results of Open-Loop and Closed-Loop Sensitivity Curves of Electrochemical Seismic Sensors at Different Temperatures
4. Design and Verification of Temperature Compensation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zeng, R.; Lin, J.; Zhao, Y.J. Development situation of geophones and its application in seismic array observation. Prog. Geophys. 2014, 29, 2106–2112. [Google Scholar] [CrossRef]
- Khoshnavaz, M.J.; Bona, A.; Urosevic, M. Passive seismic imaging without velocity model prior to imaging. In Proceedings of the 24th International Geophysical Conference and Exhibition, Perth, Australia, 15–18 February 2015. [Google Scholar]
- Graf, R.; Schmalholz, S.M.; Podladchikov, Y.; Saenger, E.H. Passive low frequency spectral analysis: Exploring a new field in geophysics. World Oil 2007, 228, 47–52. [Google Scholar]
- Manuel, A.; Roset, X.; Del Río, J.; Toma, D.M.; Carreras, N.; Panahi, S.S.; Garcia-Benadí, A.; Owen, T.; Cadena, J. Ocean Bottom Seismometer: Design and Test of a Measurement System for Marine Seismology. Sensors 2012, 12, 3693–3719. [Google Scholar] [CrossRef] [PubMed]
- Igor, A. Abramovich and Tao Zhu. Next Generation Robust Low Noise Seismometer for Nuclear Monitoring. Monit. Res. Rev. Ground-Based Nucl. Explos. Monit. Technol. 2008. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Neeshpapa, A.V.; Shabalina, A.S. Electrochemical Seismometers of Linear and Angular Motion. Encycl. Earthq. Eng. 2015, 944–961. [Google Scholar] [CrossRef]
- He, W.T.; Chen, D.Y.; Li, G.B.; Wang, J.B. Low Frequency Electrochemical Accelerometer with Low Noise Based on MEMS. Key Eng. Mater. 2012, 503, 75–80. [Google Scholar] [CrossRef]
- Li, G.; Chen, D.; Wang, J.; Jian, C.; He, W.; Fan, Y.; Deng, T. A MEMS based Seismic Sensor using the Electrochemical Approach. Procedia Eng. 2012, 47, 362–365. [Google Scholar] [CrossRef][Green Version]
- Huang, H.; Carande, B.; Tang, R.; Oiler, J.; Zaitsev, D.; Agafonov, V.; Yu, H. Development of a micro seismometer based on molecular electronic transducer technology for planetary exploration. In Proceedings of the 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 629–632. [Google Scholar] [CrossRef]
- Liang, M.; Huang, H.; Agafonov, V.; Tang, R.; Han, R.; Yu, H. Molecular electronic transducer based planetary seismometer with new fabrication process. In Proceedings of the IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 986–989. [Google Scholar] [CrossRef]
- Deng, T.; Sun, Z.; Li, G.; Chen, J.; Chen, D.; Wang, J. Microelectromechanical system-based electrochemical seismic sensors with an anode and a cathode integrated on one chip. J. Micromech. Microeng. 2016, 27, 25004. [Google Scholar] [CrossRef]
- Xu, C.; Wang, J.; Chen, D.; Chen, J.; Liu, B.; Qi, W.; Zheng, X. The Electrochemical Seismometer Based on Fine-Tune Sensing Electrodes for Undersea Exploration. IEEE Sens. J. 2020, 20, 8194–8202. [Google Scholar] [CrossRef]
- Chikishev, D.A.; Zaitsev, D.L.; Belotelov, K.S.; Egorov, I.V. The temperature dependence of amplitude-frequency response of the MET sensor of linear motion in a broad frequency range. IEEE Sens. J. 2019, 19, 9653–9661. [Google Scholar] [CrossRef]
- Lin, J.; Gao, H.; Wang, X.; Yang, C.; Xin, Y.; Zhou, X. Effect of temperature on the performance of electrochemical seismic sensor and the compensation method. Measurement 2020, 155, 107518. [Google Scholar] [CrossRef]
- Collette, C.; Janssens, S.; Fernandez-Carmona, P.; Artoos, K.; Guinchard, M.; Hauviller, C.; Preumont, A. Review: Inertial Sensors for Low-Frequency Seismic Vibration Measurement. Bull. Seism. Soc. Am. 2012, 102, 1289–1300. [Google Scholar] [CrossRef]
- He, W.T.; Chen, D.Y.; Wang, J.B.; Chen, J.; Deng, T. Extending upper cutoff frequency of electrochemical seismometer by using extremely thin Su8 insulating spacers. In Proceedings of the 2013 IEEE Sensors, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Krishtop, V.G.; Agafonov, V.M.; Bugaev, A.S. Technological principles of motion parameter transducers based on mass and charge transport in electrochemical microsystems. Russ. J. Electrochem. 2012, 48, 746–755. [Google Scholar] [CrossRef]
- Kozlov, V.A.; Safonov, M.V. Dynamic Characteristic of an Electrochemical Cell with Gauze Electrodes in Convective Diffusion Conditions. Russ. J. Electrochem. 2004, 40, 460–462. [Google Scholar] [CrossRef]
- Li, G.; Wang, J.; Chen, D.; Chen, J.; Chen, L.; Xu, C. An Electrochemical, Low-Frequency Seismic Micro-Sensor Based on MEMS with a Force-Balanced Feedback System. Sensors 2017, 17, 2103. [Google Scholar] [CrossRef] [PubMed]
- Egorov, I.V.; Shabalina, A.S.; Agafonov, V.M. Design and Self-Noise of MET Closed-Loop Seismic Accelerometers. IEEE Sens. J. 2017, 17, 2008–2014. [Google Scholar] [CrossRef]
- Bard, A.J.; Faulkner, L.R. Electrochemical Methods: Fundamentals and Applications, 2nd ed.; Harris, D., Swain, E., Robey, C., Aiello, E., Eds.; John Wiley & Sons: New York, NY, USA, 1980. [Google Scholar]
- Agafonov, V.M.; Zaitsev, D.L. Convective noise in molecular electronic transducers of diffusion type. Tech. Phys. 2010, 55, 130–136. [Google Scholar] [CrossRef]
- Li, G.; Wang, J.; Chen, D.; Sun, Z.; Xing, Y.; Xu, C.; Chen, J. The effect of spring elasticity coefficient on the characteristics of electrochemical seismic sensor based on the MEMS technology. In Proceedings of the 2016 International Conference on Manipulation, Automation and Robotics at Small Scales (IEEE MARSS 2016), Paris, France, 18–22 July 2016. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Principles | Company /Organization | Type | Bandwidth | Sensitivity V/(m/s) | Self-Noise @1 Hz | Power Consumption | Working Inclination |
|---|---|---|---|---|---|---|---|
| Electromagnetic | CGE Geological | CDJ-Z4 | 4 Hz–100 Hz | 28 | / | / | / |
| Capacitive | Streckeisen | STS-2.5 | 120 s–50 Hz | 1500 | −205 dB | 450 mW | ±0.48° |
| Nanometrics | Trillium Compact | 120 s–100 Hz | 750 | −190 dB | 180 mW | ±2.5° | |
| Guralp | 3 T-360 | 360 s–50 Hz | 1500 | −206 dB | 750 mW | ±2.5° | |
| Electrochemical | R-Sensors | CME6211 | 120 s–50 Hz | 2000 | −184 dB | 360 mW | ±15° |
| PMD | BB603 | 120 s–50 Hz | 2000 | −185 dB | 336 mW | ±10° | |
| This work | ECS-100 s | 100 s–40 Hz | 2000 | −175 dB | 195 mW | ±15° |
| −10 °C | 0 °C | 10 °C | 20 °C | 30 °C | 40 °C | |
|---|---|---|---|---|---|---|
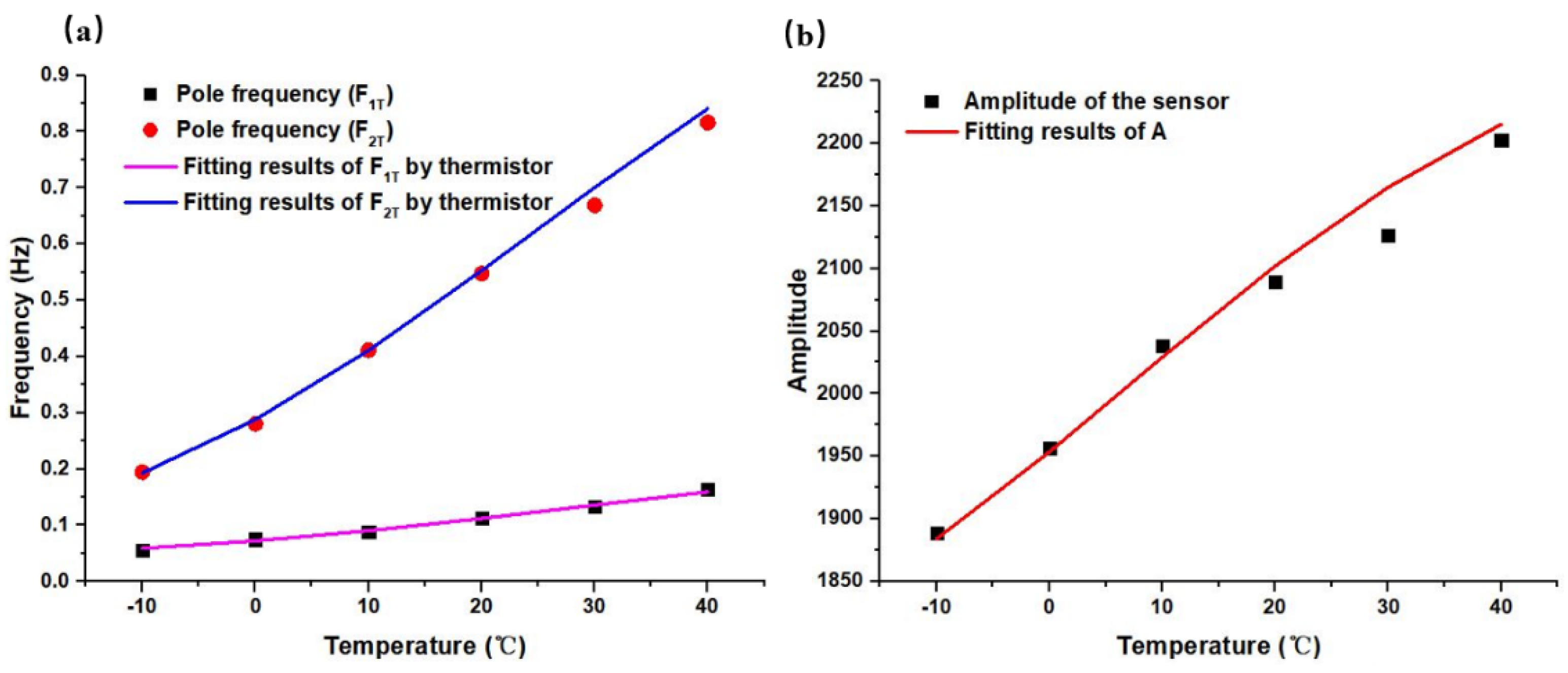
| f1T (Hz) | 0.05599 | 0.0750 | 0.0884 | 0.1122 | 0.1341 | 0.1638 |
| f2T (Hz) | 0.19431 | 0.2802 | 0.4112 | 0.5475 | 0.6688 | 0.8159 |
| f3T (Hz) | 7.67711 | 6.82852 | 6.37973 | 6.97311 | 6.11246 | 6.54337 |
| f4T (Hz) | 73.70842 | 64.81987 | 64.13743 | 69.15448 | 65.41345 | 69.1994 |
| AT | 1888.3 | 1956.4 | 2038.6 | 2089.0 | 2126.4 | 2202.5 |
| R0 | C0 | Rs1 | Rs2 | Rp | C1 | |
|---|---|---|---|---|---|---|
| Compensation circuit for | 107 K | 13.3 uF | 39.6 K | 10.3 K | 313.3 K | 13.3 uF |
| Compensation circuit for | 154 K | 1.9 uF | 61.6 K | 288 Ω | 2.55 M | 1.9 uF |
| Compensation circuit for | 121.3 K | / | 108 K | 59.6 K | 86.1 K | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, C.; Wang, J.; Chen, D.; Chen, J.; Qi, W.; Liu, B.; Liang, T.; She, X. Temperature Compensation of the MEMS-Based Electrochemical Seismic Sensors. Micromachines 2021, 12, 387. https://doi.org/10.3390/mi12040387
Xu C, Wang J, Chen D, Chen J, Qi W, Liu B, Liang T, She X. Temperature Compensation of the MEMS-Based Electrochemical Seismic Sensors. Micromachines. 2021; 12(4):387. https://doi.org/10.3390/mi12040387
Chicago/Turabian StyleXu, Chao, Junbo Wang, Deyong Chen, Jian Chen, Wenjie Qi, Bowen Liu, Tian Liang, and Xu She. 2021. "Temperature Compensation of the MEMS-Based Electrochemical Seismic Sensors" Micromachines 12, no. 4: 387. https://doi.org/10.3390/mi12040387
APA StyleXu, C., Wang, J., Chen, D., Chen, J., Qi, W., Liu, B., Liang, T., & She, X. (2021). Temperature Compensation of the MEMS-Based Electrochemical Seismic Sensors. Micromachines, 12(4), 387. https://doi.org/10.3390/mi12040387