
Human Motion State Recognition Based on Flexible, Wearable Capacitive Pressure Sensors


Abstract
:1. Introduction
2. Experimental Section
2.1. Preparation of Materials
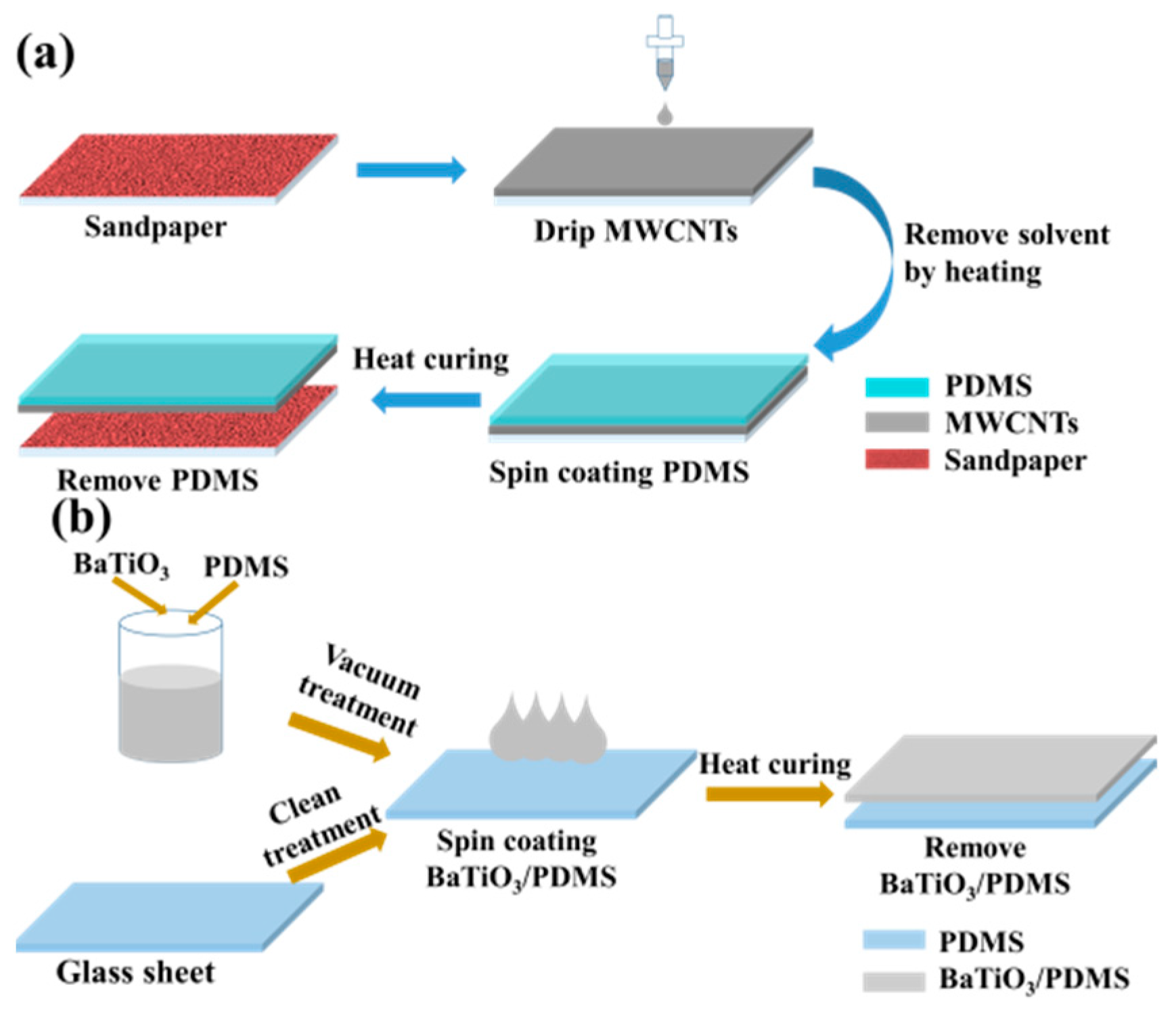
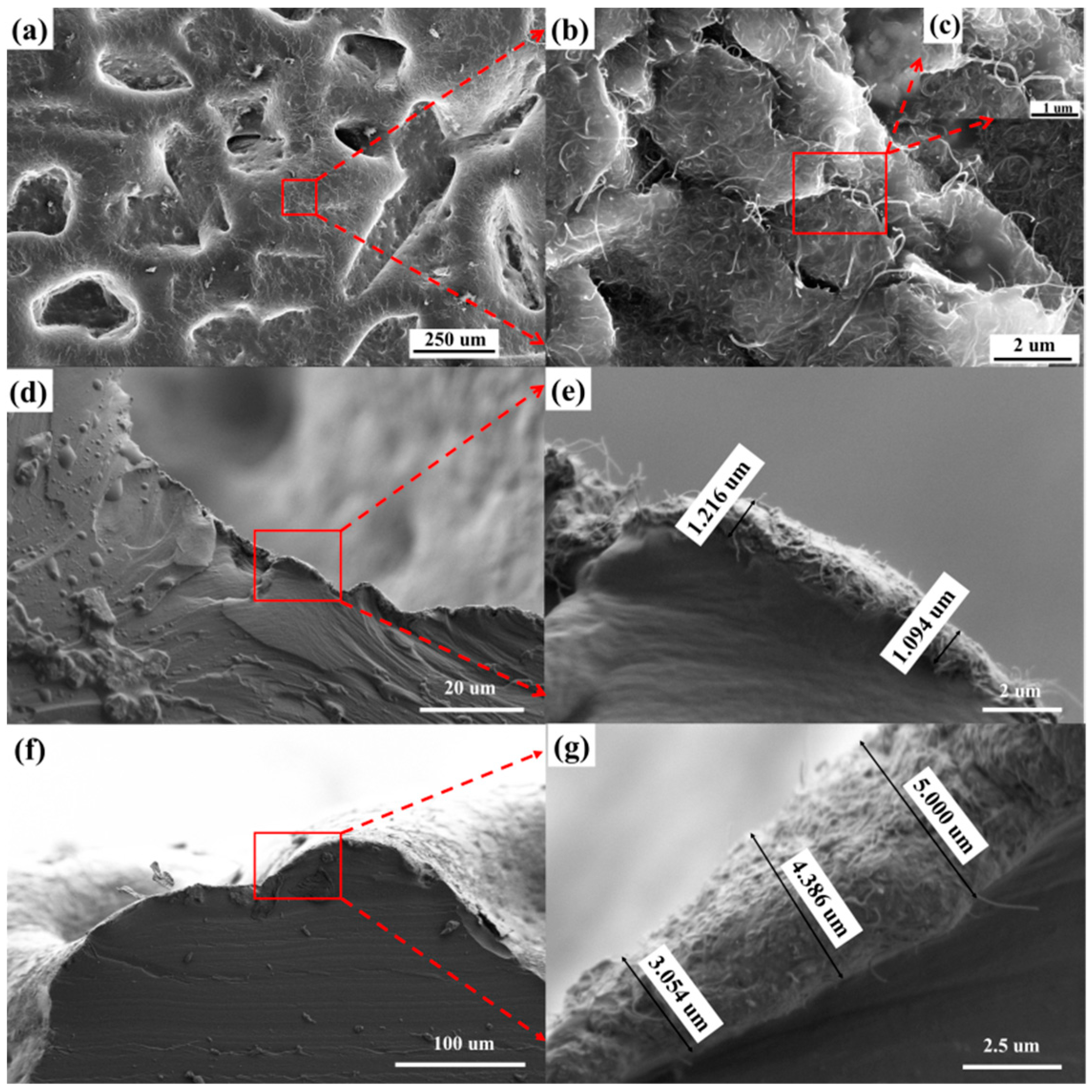
2.2. Fabrication of Microstructured Electrode Layer
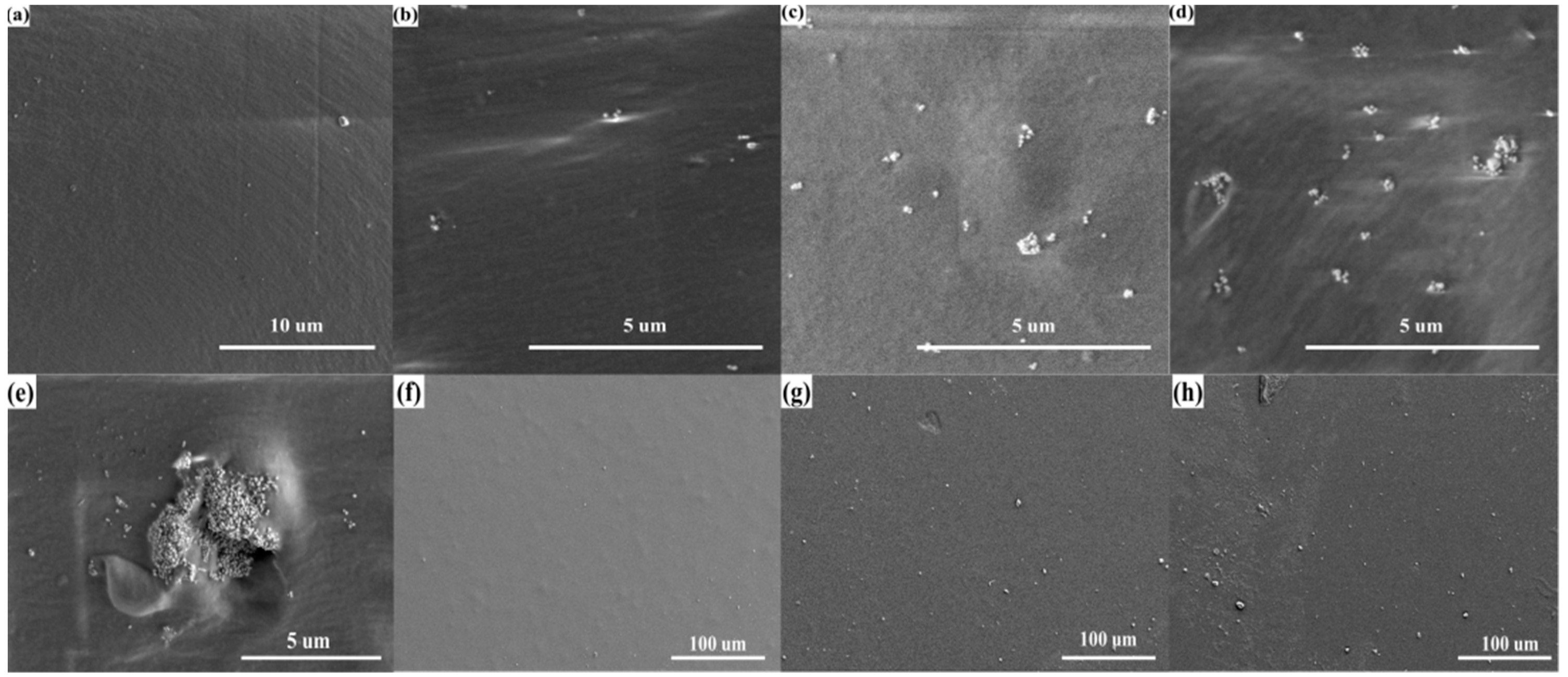
2.3. Fabrication and Analysis of Dielectric Layer
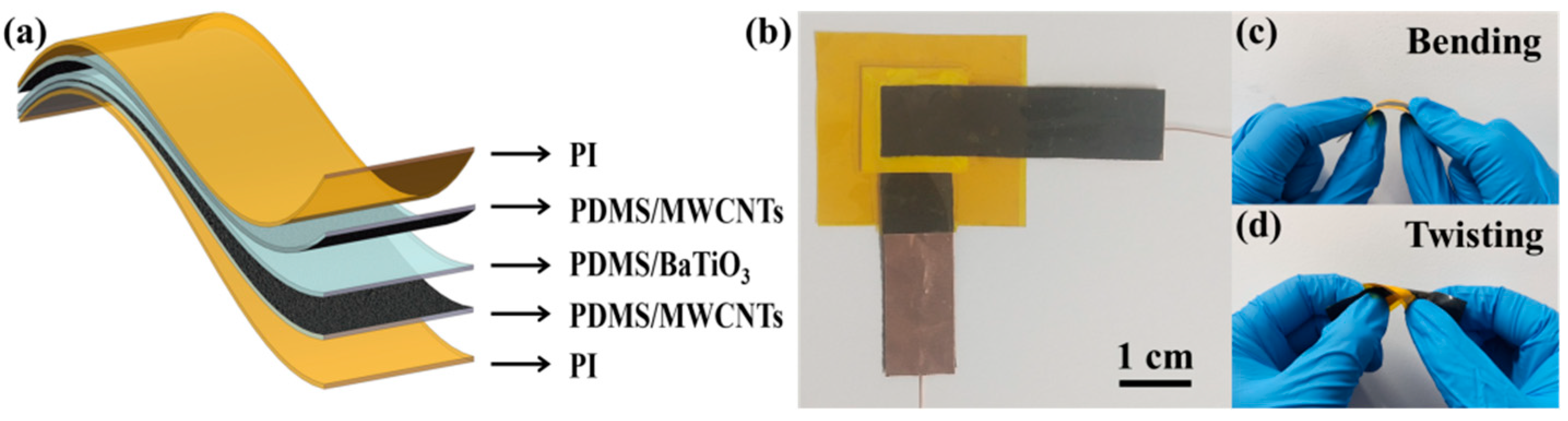
2.4. Sensor Packaging
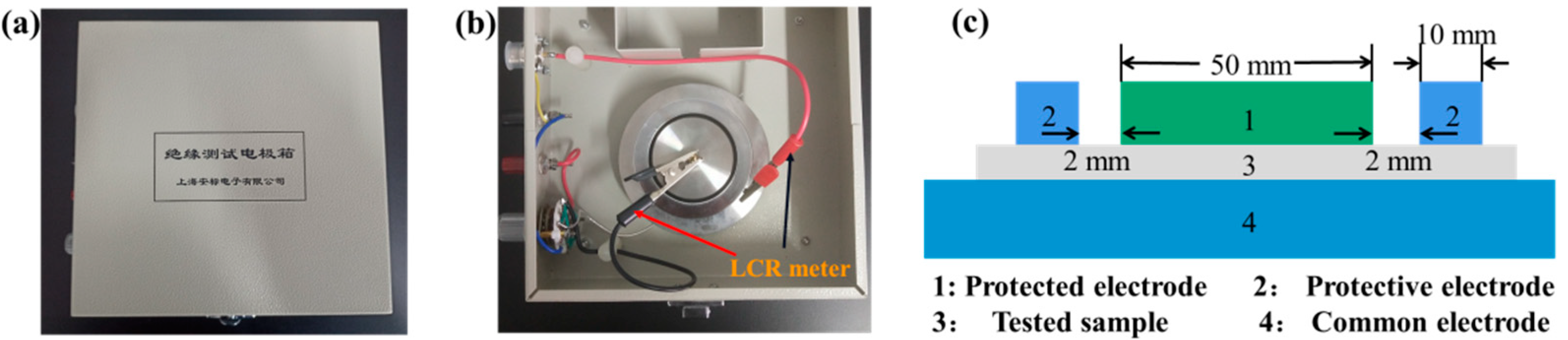
2.5. Characterization
3. Results and Discussion
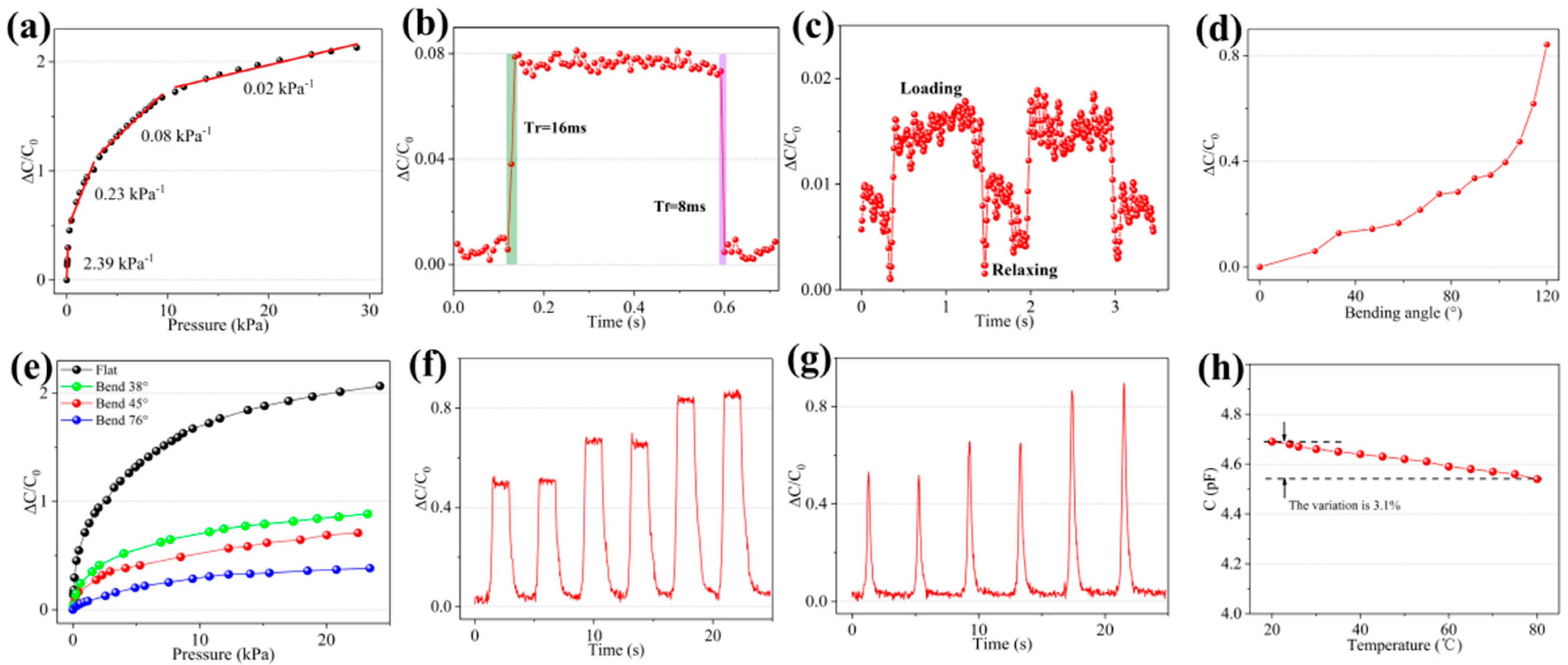
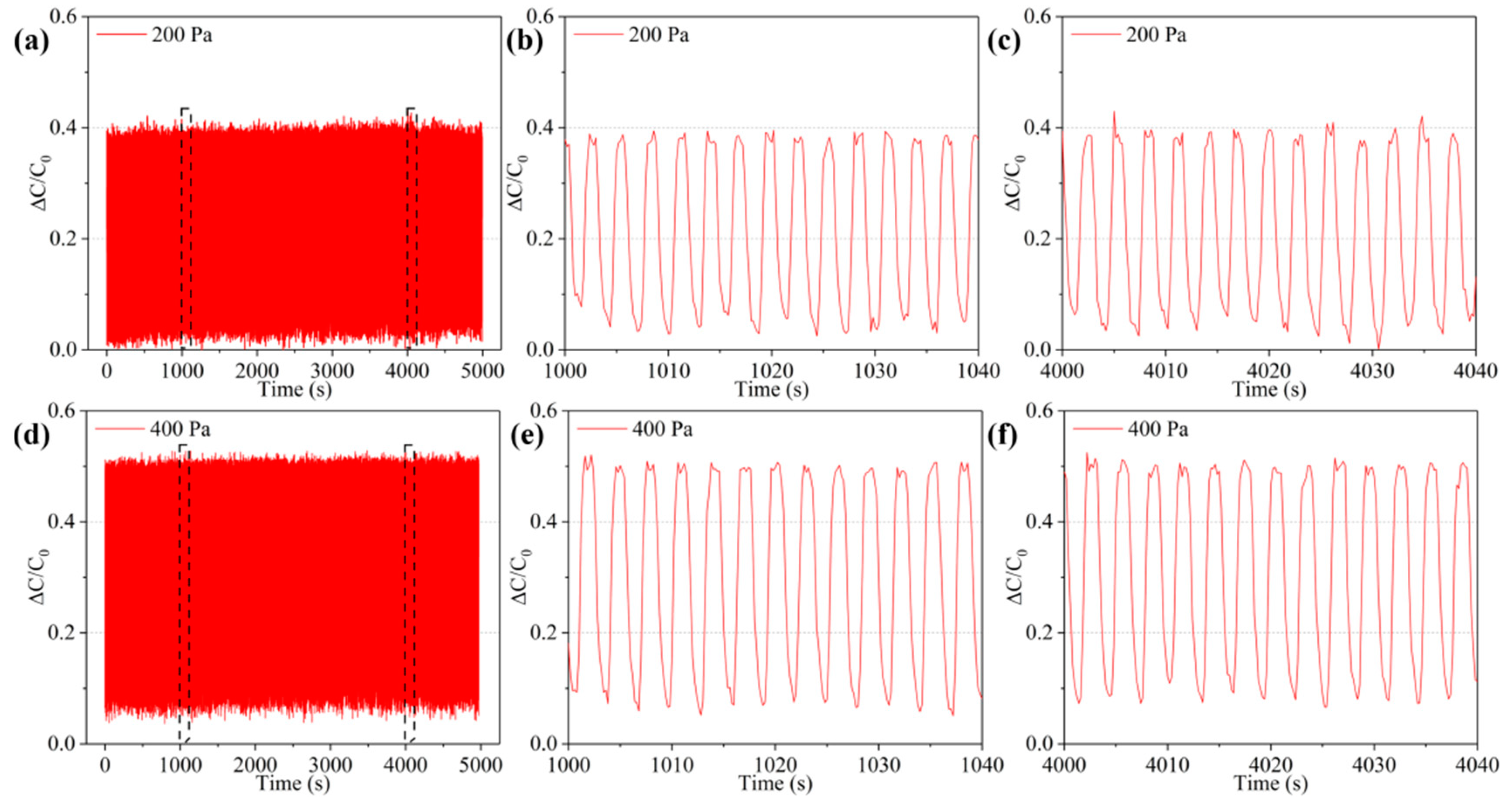
3.1. Performance of the Pressure Sensor
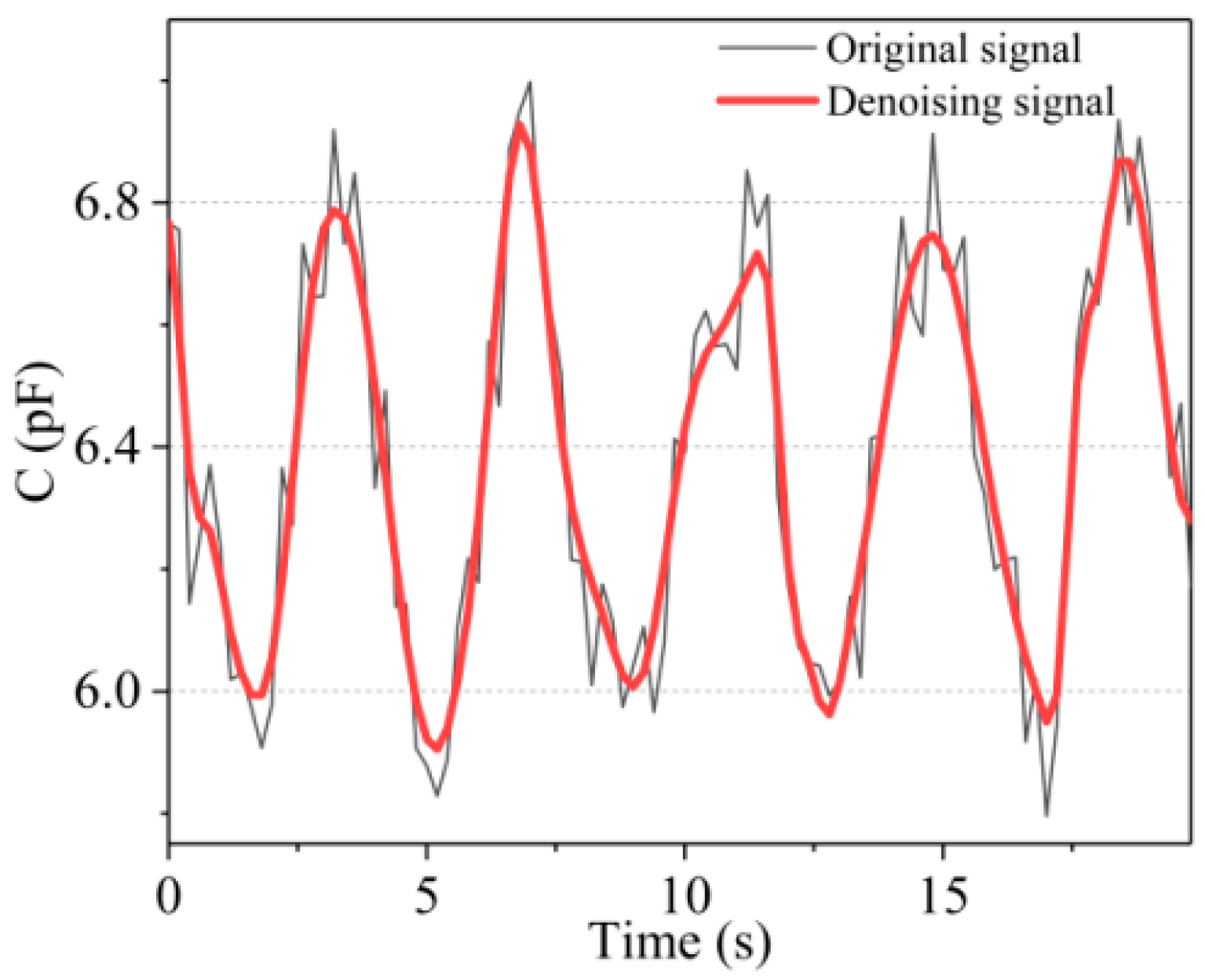
3.2. Acquisition and Denoising of Sensor Signals
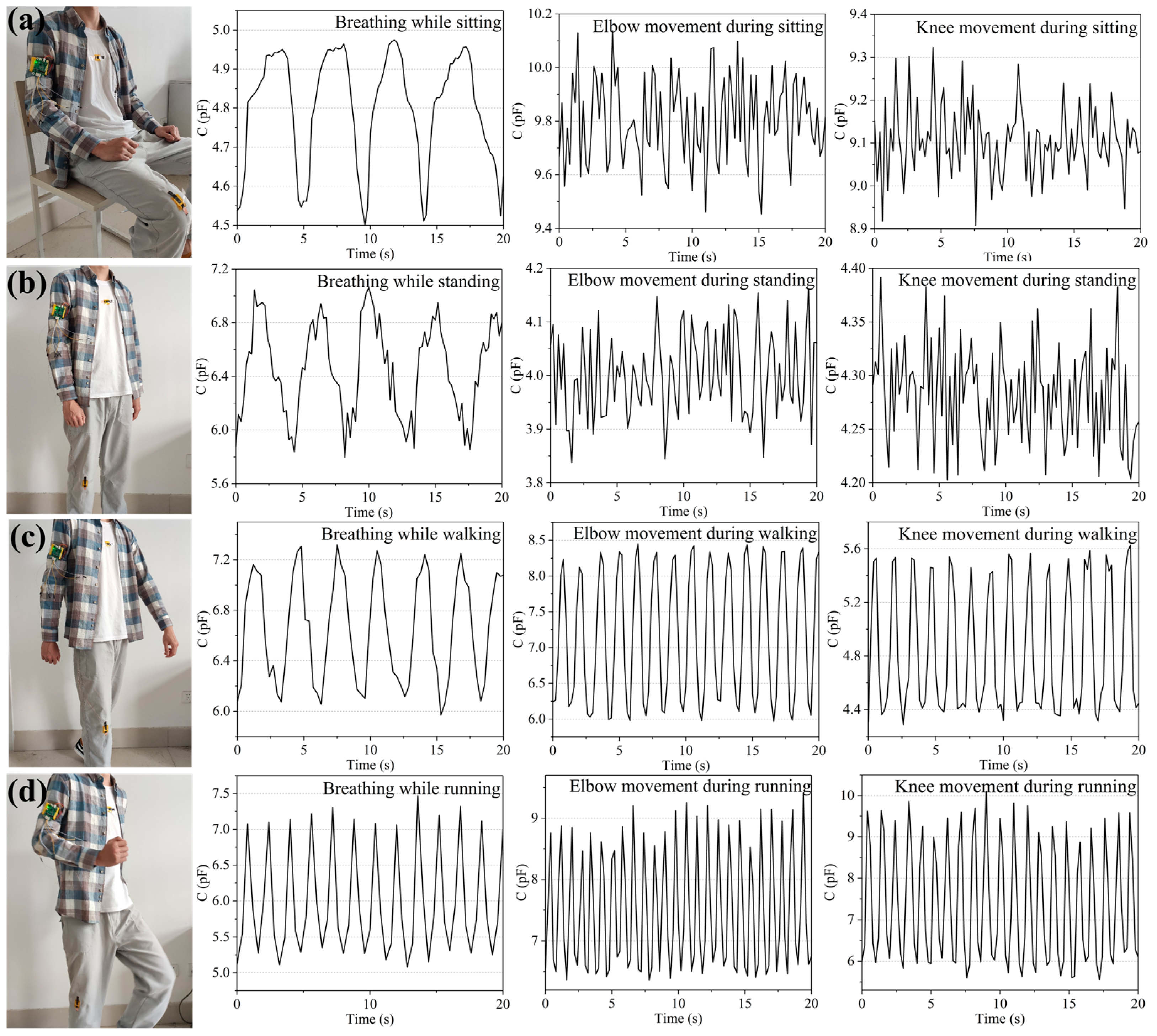
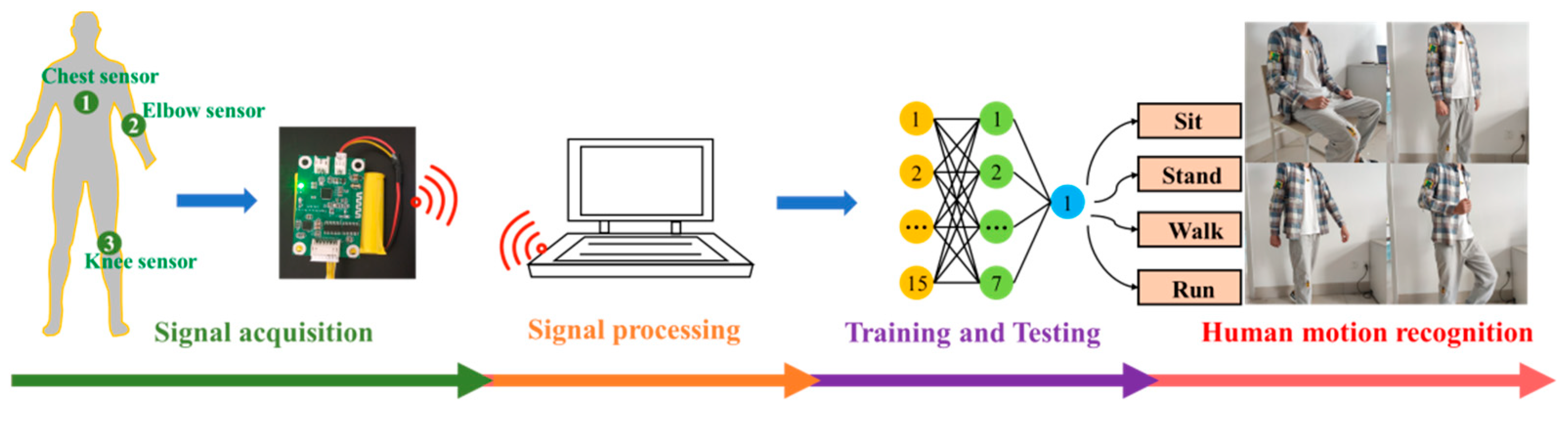
3.3. Construction of BP Neural Model and Testing of Human Motion State Recognition System
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Hasnain, Z.; Li, M.; Dorff, T.; Quinn, D.; Ueno, N.T.; Yennu, S.; Kolatkar, A.; Shahabi, C.; Nocera, L.; Nieva, J.; et al. Low-dimensional dynamical characterization of human performance of cancer patients using motion data. Clin. Biomech. 2018, 56, 61–69. [Google Scholar] [CrossRef] [PubMed]
- Xionga, Y.X.; Shen, Y.K.; Tian, L.; Hu, Y.G.; Zhu, P.L.; Sun, R.; Wong, C.-P. A Flexible, Ultra-Highly Sensitive and Stable Capacitive Pressure Sensor with Convex Microarrays for Motion and Health Monitoring. Nano Energy 2019, 70, 104436. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Huang, Y.; Sun, X.H.; Zhao, Y.N.; Guo, X.H.; Liu, P.; Liu, C.X.; Zhang, Y.G. Static and Dynamic Human Arm/Hand Gesture Capturing and Recognition via Multi-Information Fusion of Flexible Strain Sensors. IEEE Sens. J. 2020, 20, 6450–6459. [Google Scholar] [CrossRef]
- Feng, Y.Q.; Li, Y.Z.; McCoul, D.; Qin, S.H.; Jin, T.; Huang, B.; Zhao, J.W. Dynamic Measurement of Legs Motion in Sagittal Plane Based on Soft Wearable Sensors. J. Sens. 2020, 2020, 10. [Google Scholar] [CrossRef]
- Huang, Y.; Hao, C.; Guo, X.H.; Zhang, Y.Y.; Liu, P.; Liu, C.X.; Zhang, Y.G. Highly stretchable, rapid-response strain sensor based on SWCNTs/CB nanocomposites coated on rubber/latex polymer for human motion tracking. Sens. Rev. 2019, 39, 233–245. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, Y.C.; Li, Y.X.; Zhang, Y.; Zhang, J.; Huang, L.S. A Flexible Strain Sensor Based on the Porous Structure of a Carbon Black/Carbon Nanotube Conducting Network for Human Motion Detection. Sensors 2019, 39, 1154. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.C.; Sun, Z.X. Time-varying LSTM networks for action recognition. Multimed. Tools Appl. 2018, 77, 32275–32285. [Google Scholar] [CrossRef]
- Bilen, H.; Fernando, B.; Gavves, E.; Vedaldi, A. Action Recognition with Dynamic Image Networks. IEEE Trans. Pattern Anal. 2018, 40, 2799–2813. [Google Scholar] [CrossRef] [Green Version]
- Chamroukhi, F.; Mohammed, S.; Trabelsi, D.; Oukhellou, L.; Amirat, Y. Joint segmentation of multivariate time series with hidden process regression for human activity recognition. Neurocomputing 2013, 120, 633–644. [Google Scholar] [CrossRef] [Green Version]
- Ronao, C.A.; Cho, S.B. Human activity recognition with smartphone sensors using deep learning neural networks. Expert Syst. Appl. 2016, 59, 235–244. [Google Scholar] [CrossRef]
- Tang, L.X.; Shang, J.; Jiang, X.Y. Multilayered electronic transfer tattoo that can enable the crease amplification effect. Sci. Adv. 2021, 7, eabe3778. [Google Scholar] [CrossRef]
- Yang, G.; Lv, H.G.; Chen, F.Y.; Pang, Z.B.; Wang, J.; Yang, H.Y.; Zhang, J.H. A Novel Gesture Recognition System for Intelligent Interaction with a Nursing-Care Assistant Robot. Appl. Sci. 2018, 8, 2349. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Zhou, X.; Liu, Y.H.; Fu, Q. Highly Sensitive, Ultrastretchable Strain Sensors Prepared by Pumping Hybrid Fillers of Carbon Nanotubes/Cellulose Nanocrystal into Electrospun Polyurethane Membranes. ACS Appl. Mater. Interfaces 2019, 11, 12968–12977. [Google Scholar] [CrossRef]
- Huang, J.Y.; Li, D.W.; Zhao, M.; Mensah, A.; Lv, P.F.; Tian, X.J.; Huang, F.L.; Ke, H.Z.; Wei, Q.F. Highly Sensitive and Stretchable CNT-Bridged AgNP Strain Sensor Based on TPU Electrospun Membrane for Human Motion Detection. ACS Appl. Mater. Inter. 2019, 11, 12968–12977. [Google Scholar] [CrossRef]
- He, Z.L.; Zhou, G.H.; Byun, J.H.; Lee, S.K.; Um, M.k.; Park, B.; Kim, T.; Lee, S.B.; Chou, T.W. Highly stretchable multi-walled carbon nanotube/thermoplastic polyurethane composite fibers for ultrasensitive, wearable strain sensors. Nanoscale 2019, 11, 5884–5890. [Google Scholar] [CrossRef]
- Al-Handarish, Y.; Omisore, O.M.; Duan, W.K.; Chen, J.; Zebang, L.; Akinyemi, T.O.; Du, W.J.; Li, H.; Wang, L. Facile Fabrication of 3D Porous Sponges Coated with Synergistic Carbon Black/Multiwalled Carbon Nanotubes for Tactile Sensing Applications. Nanomaterials 2020, 10, 1941. [Google Scholar] [CrossRef]
- Lou, Z.; Chen, S.; Wang, L.L.; Jiang, K.; Shen, G.Z. An ultra-sensitive and rapid response speed graphene pressure sensors for electronic skin and health monitoring. Nano Energy 2016, 23, 7–14. [Google Scholar] [CrossRef]
- Guan, X.Y.; Xu, B.A.; Gong, J.L. Hierarchically Architected Polydopamine Modified BaTiO3@P(VDF-TrFE) Nanocomposite Fiber Mats for Flexible Piezoelectric Nanogenerators and Self-powered Sensors. Nano Energy 2020, 7, 104516. [Google Scholar] [CrossRef]
- Xu, J.L.; Wang, H.T.; Ma, T.T.; Wu, Y.J.; Xue, R.; Cui, H.X.; Wu, X.L.; Wang, Y.; Huang, X.X.; Yao, W. A Graphite Nanoplatelet-Based Highly Sensitive Flexible Strain Sensor. Carbon 2020, 166, 316–327. [Google Scholar] [CrossRef]
- Kwon, D.; Lee, T.-L.; Shim, J.; Ryu, S.; Kim, M.S.; Kim, S.; Kim, T.-S.; Park, I. Highly Sensitive, Flexible and Wearable Pressure Sensor Based on a Giant Piezocapacitive Effect of Three-Dimensional Microporous Elastomeric Dielectric Layer. ACS Appl. Mater. Inter. 2016, 8, 16922–16931. [Google Scholar] [CrossRef] [PubMed]
- Chortos, A.; Liu, J.; Bao, Z.N. Pursuing Prosthetic Electronic Skin. Nat. Mater. 2016, 15, 937–950. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.D.; Liu, T. SWCNT/Graphite Nanoplatelet Hybrid Thin Films for Self-Temperature-Compensated, Highly Sensitive and Extensible Piezoresistive Sensors. Adv. Mater. 2013, 25, 5650–5657. [Google Scholar] [CrossRef] [PubMed]
- Niu, H.S.; Gao, S.; Yue, W.J.; Li, Y.; Zhou, W.J.; Liu, H. Highly Morphology-Controllable and Highly Sensitive Capacitive Tactile Sensor Based on Epidermis-Dermis-Inspired Interlocked Asymmetric-Nanocone Arrays for Detection of Tiny Pressure. Small 2020, 16, 1904774. [Google Scholar] [CrossRef]
- Li, Y.; Cao, Z.G.; Li, T.; Sun, F.Q.; Bai, Y.Y.; Lu, Q.F.; Wang, S.Q.; Yang, X.Q.; Hao, M.Z.; Lan, N.; et al. Highly Selective Biomimetic Flexible Tactile Sensor for Neuroprosthetics. Research 2020, 2020, 8910692. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Luo, H.; Qin, L.; Wang, X.W.; Xiong, Z.P.; Ding, H.Y.; Gu, Y.; Liu, Z.; Zhang, T. Flexible Capacitive Tactile Sensor Based on Micropatterned Dielectric Layer. Small 2016, 12, 5042–5048. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.B.; Tee, B.C.-K.; Stoltenberg, R.M.; Chen, C.V.H.-H.; Barman, S.; Muir, B.V.O.; Sokolov, A.N.; Reese, C.; Bao, Z.N. Highly Sensitive Flexible Pressure Sensors with Microstructured Rubber Dielectric Layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Jin, X.; Zheng, Y.D.; Chang, X.D.; Wang, W.Y.; Lin, T.; Zheng, F.; Onyilagha, O.; Zhu, Z.T. A Porous and Air Gap Elastomeric Dielectric Layer for Wearable Capacitive Pressure Sensor with High Sensitivity and a Wide Detection Range. J. Mater. Chem. C 2020, 8, 11468–11476. [Google Scholar] [CrossRef]
- Zhang, Z.; Gui, X.C.; Hu, Q.M.; Yang, L.L.; Yang, R.L.; Huang, B.F.; Yang, B.-R.; Tang, Z.K. Highly Sensitive Capacitive Pressure Sensor Based on a Micropyramid Array for Health and Motion Monitoring. Adv. Electron. Mater. 2021, 7, 2100174. [Google Scholar] [CrossRef]
- Chen, Y.C.; Zhang, P.; Li, Y.X.; Zhang, K.; Su, J.P.; Huang, L.S. Flexible Capacitive Pressure Sensor Based on Multi-Walled Carbon Nanotubes Microstructure Electrodes. J. Phys. D Appl. Phys. 2021, 54, 155101. [Google Scholar] [CrossRef]
- Tang, Y.Z.; Ge, G.H.; Li, Y.X.; Huang, L.S. Effect of Al2O3 with Different Nanostructures on the Insulating Properties of Epoxy-Based Composites. Materials 2020, 13, 4235. [Google Scholar] [CrossRef]
- Yoon, J.I.; Choi, K.S.; Chang, S.P. A Novel Means of Fabricating Microporous Structures for the Dielectric Layers of Capacitive Pressure Sensor. Microelectron. Eng. 2017, 179, 60–66. [Google Scholar] [CrossRef]
- Yang, X.F.; Wang, Y.S.; Qing, X.L. A Flexible Capacitive Sensor Based on the Electrospun PVDF Nanofiber Membrane with Carbon Nanotubes. Sensor. Actuat. A-Phys. 2019, 299, 111579. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Liu, S.D.; Miao, Y.H.; Yang, H.; Chen, X.Y.; Xiao, X.; Jiang, Z.Y.; Chen, X.J.; Nie, B.Q.; Liu, J. A Highly Stretchable and Sensitive Pressure Sensor Array Based on Icicle-Shaped Liquid Metal Film Electrodes. ACS Appl. Mater. Interfaces 2020, 12, 27961–27970. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.N.; Yang, Z.; Jiang, S.; Ju, Z.Y.; Li, Y.X.; Wang, X.F.; Wang, D.Y.; Jian, M.Q.; Zhang, Y.Y.; et al. Epidermis Microstructure Inspired Graphene Pressure Sensor with Random Distributed Spinosum for High Sensitivity and Large Linearity. ACS Nano 2018, 12, 2346–2354. [Google Scholar] [CrossRef]
- Chhetry, A.; Das, P.S.; Yoon, H.; Park, J.Y. A Sandpaper-Inspired Flexible and Stretchable Resistive Sensor for Pressure and Strain Measurement. Org. Electron. 2018, 62, 581–590. [Google Scholar] [CrossRef]
- Jia, W.D.; Zhang, Q.; Cheng, Y.Q.; Cheng, D.; Liu, Y.; Zhang, W.D.; Sang, S.B. Flexible and Highly Sensitive Piezoresistive Pressure Sensor with Sandpaper as a Mold. Nano 2019, 14, 13–22. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Structure Characteristics | Sensitivity (kPa−1) | Optimal Sensitivity Range (kPa) | Minimum Resolution (Pa) | Response Time (s) | Stability (Cycles) | Reference |
|---|---|---|---|---|---|---|
| PDMS film with pyramidal microstructure | 0.55 | 0–0.2 | 3 | <1 | thousands of times | [26] |
| PDMS film with wave-shaped microstructure | 4.9 | 0–2.5 | <1.7 | <0.05 | 5000 | [31] |
| Dielectric layer with electrospinningcomposite fiber film | 0.99 | 0–1.2 | ~ | 0.029 | 1000 | [32] |
| Electrode layer with icicle-shaped liquid metal film | 0.39 | 0–1 | 12 | 0.19 | 6000 | [33] |
| Microstructured PDMS film coated with reduced graphene oxide | 25.1 | 0–2.6 | 16 | 0.12 | 3000 | [34] |
| PDMS film with sandpaper microstructure | 0.3954 | 0–2.67 | ~ | 0.49 | 6000 | [35] |
| Microstructured PDMS spraying Ag nanowells | 0.2837 | 0–1.3 | 300 | 0.05 | ~ | [36] |
| Microstructured PDMS surface embedded with MWCNTs | 2.39 | 0–0.12 | 6.8 | 0.016 | >10000 | This work |
| Test Samples | Four Outputs of BP Neural Network | Correct Recognition Rate (%) | |||
|---|---|---|---|---|---|
| Sitting | Standing | Walking | Running | ||
| Sitting | 24 | 1 | 0 | 0 | 96 |
| Standing still | 1 | 24 | 0 | 0 | 96 |
| Walking | 1 | 1 | 23 | 0 | 92 |
| Running | 0 | 0 | 2 | 23 | 92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Q.; Zhang, P.; Chen, Y. Human Motion State Recognition Based on Flexible, Wearable Capacitive Pressure Sensors. Micromachines 2021, 12, 1219. https://doi.org/10.3390/mi12101219
Yu Q, Zhang P, Chen Y. Human Motion State Recognition Based on Flexible, Wearable Capacitive Pressure Sensors. Micromachines. 2021; 12(10):1219. https://doi.org/10.3390/mi12101219
Chicago/Turabian StyleYu, Qingyang, Peng Zhang, and Yucheng Chen. 2021. "Human Motion State Recognition Based on Flexible, Wearable Capacitive Pressure Sensors" Micromachines 12, no. 10: 1219. https://doi.org/10.3390/mi12101219
APA StyleYu, Q., Zhang, P., & Chen, Y. (2021). Human Motion State Recognition Based on Flexible, Wearable Capacitive Pressure Sensors. Micromachines, 12(10), 1219. https://doi.org/10.3390/mi12101219