
Performance Evaluation of a Magnetically Driven Microrobot for Targeted Drug Delivery

 ,
,  ,
, 
Abstract
:1. Introduction
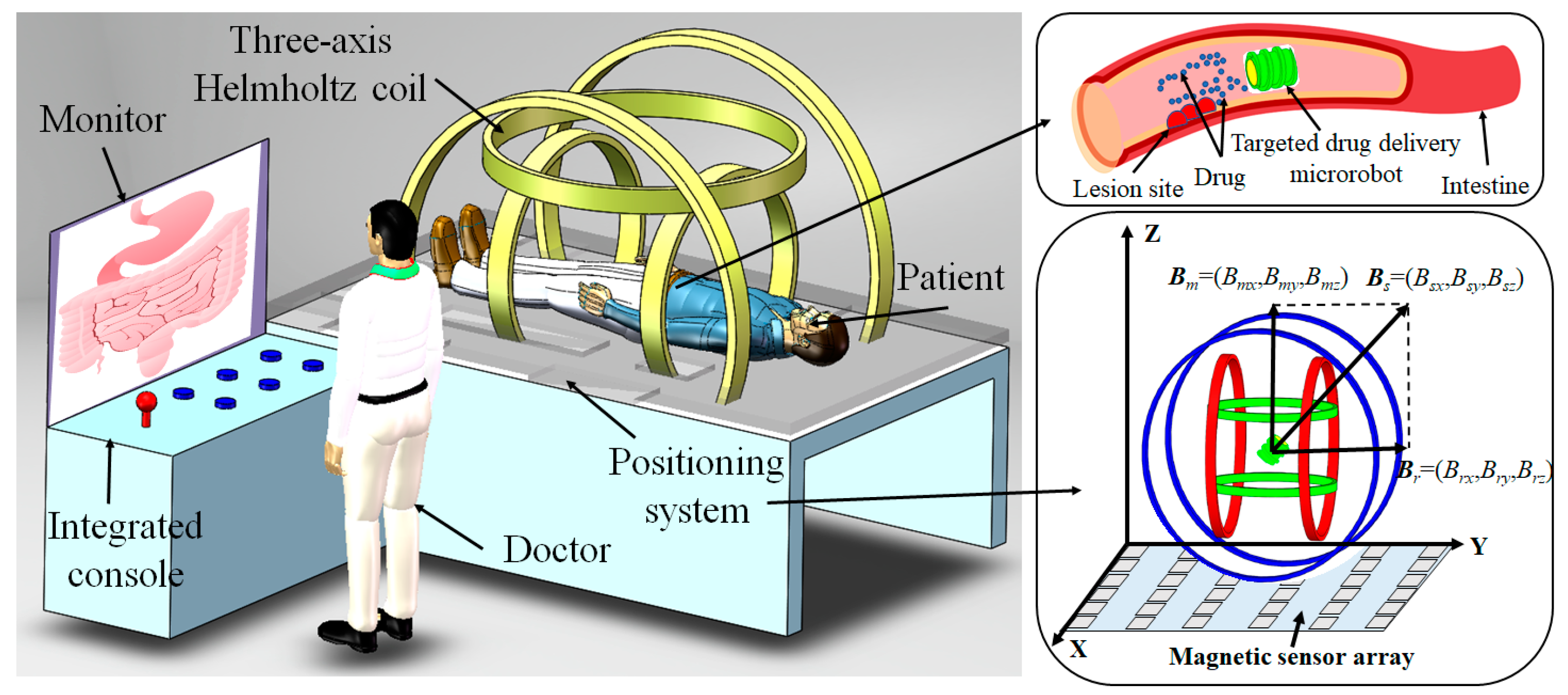
2. Electromagnetic System Configuration of Targeted Drug Delivery Microrobot
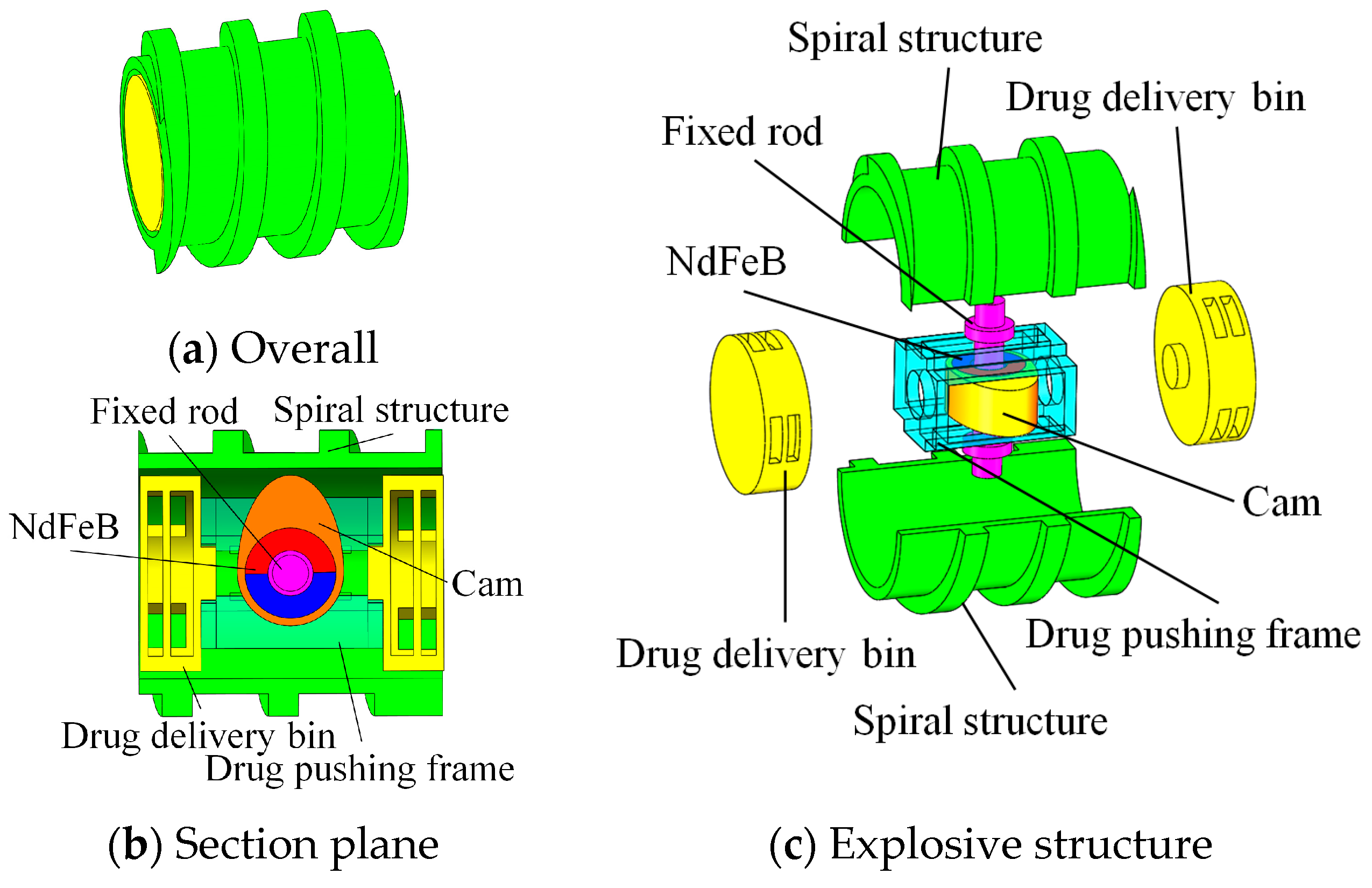
3. Targeted Drug Delivery Microrobot
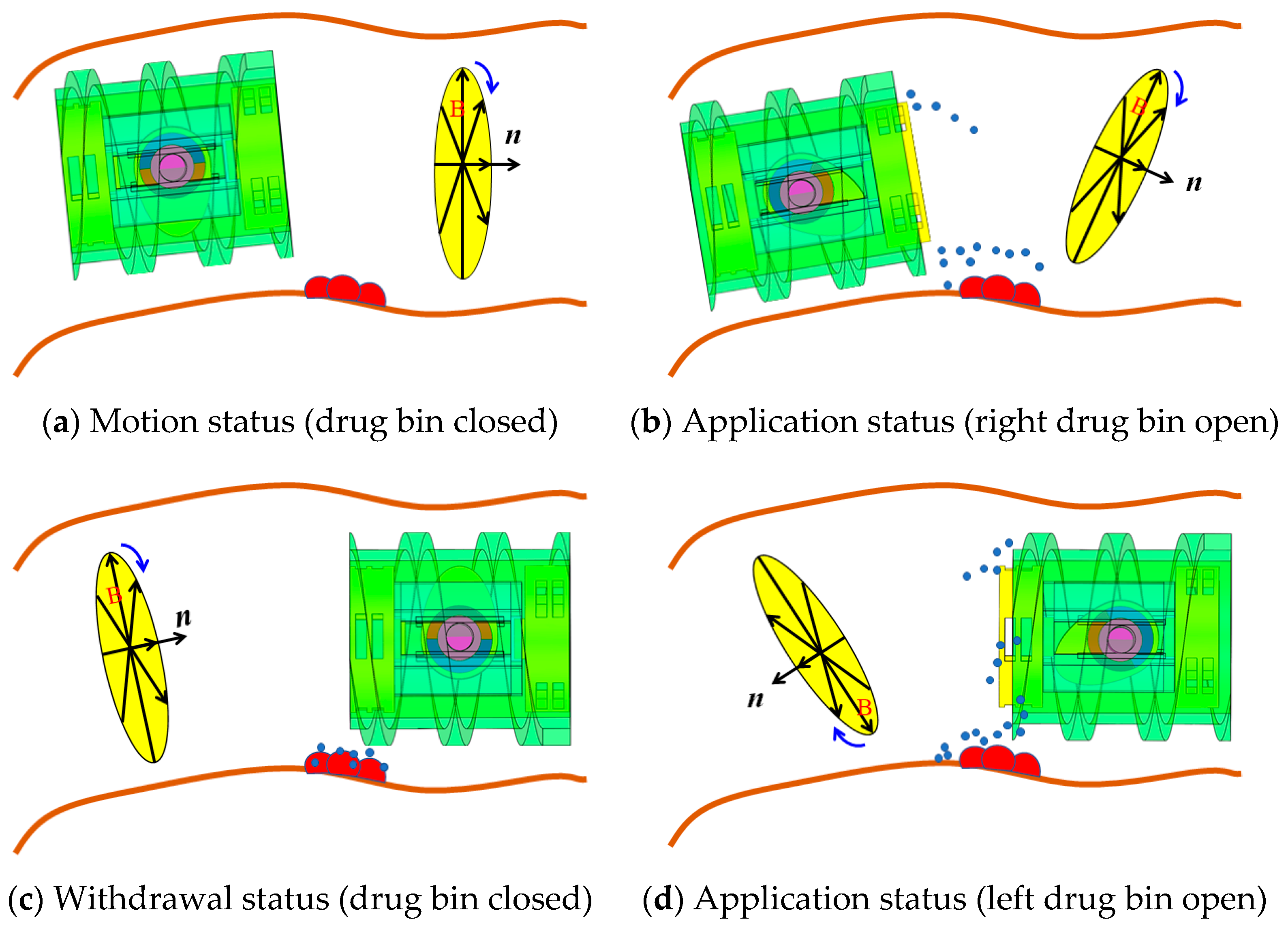
3.1. Motion Mechanism of Targeted Drug Delivery Microrobot
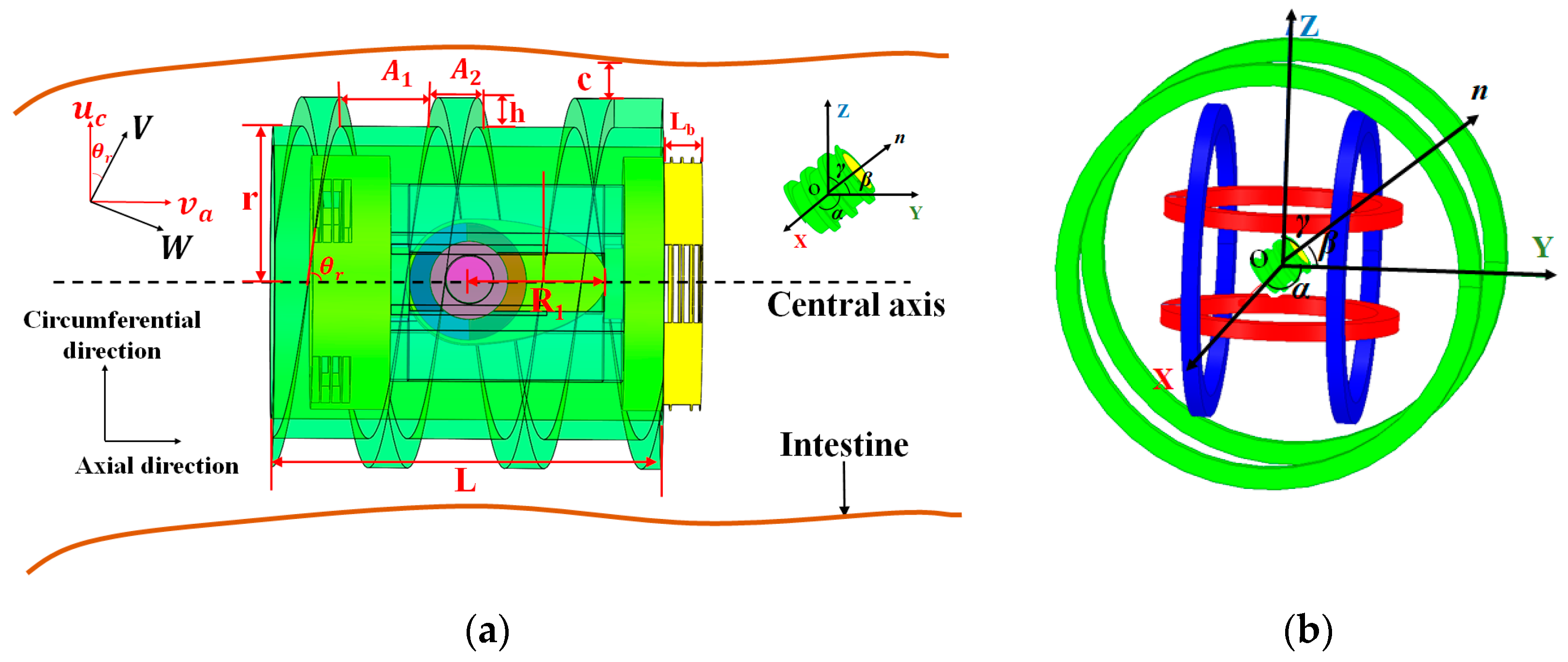
3.2. Dynamic Model
3.3. Quantitative Targeted Delivery Model
4. Analysis of Drug Delivery Process of Targeted Drug Delivery Microrobot
4.1. Model of Drug Delivery
4.2. Electromagnetic Analysis
4.3. Hydrodynamics Analysis of Targeted Drug Delivery Process
5. Experimental Results
5.1. Motion Characteristics of Microrobot
5.2. Drug Delivery Conditions of Microrobot
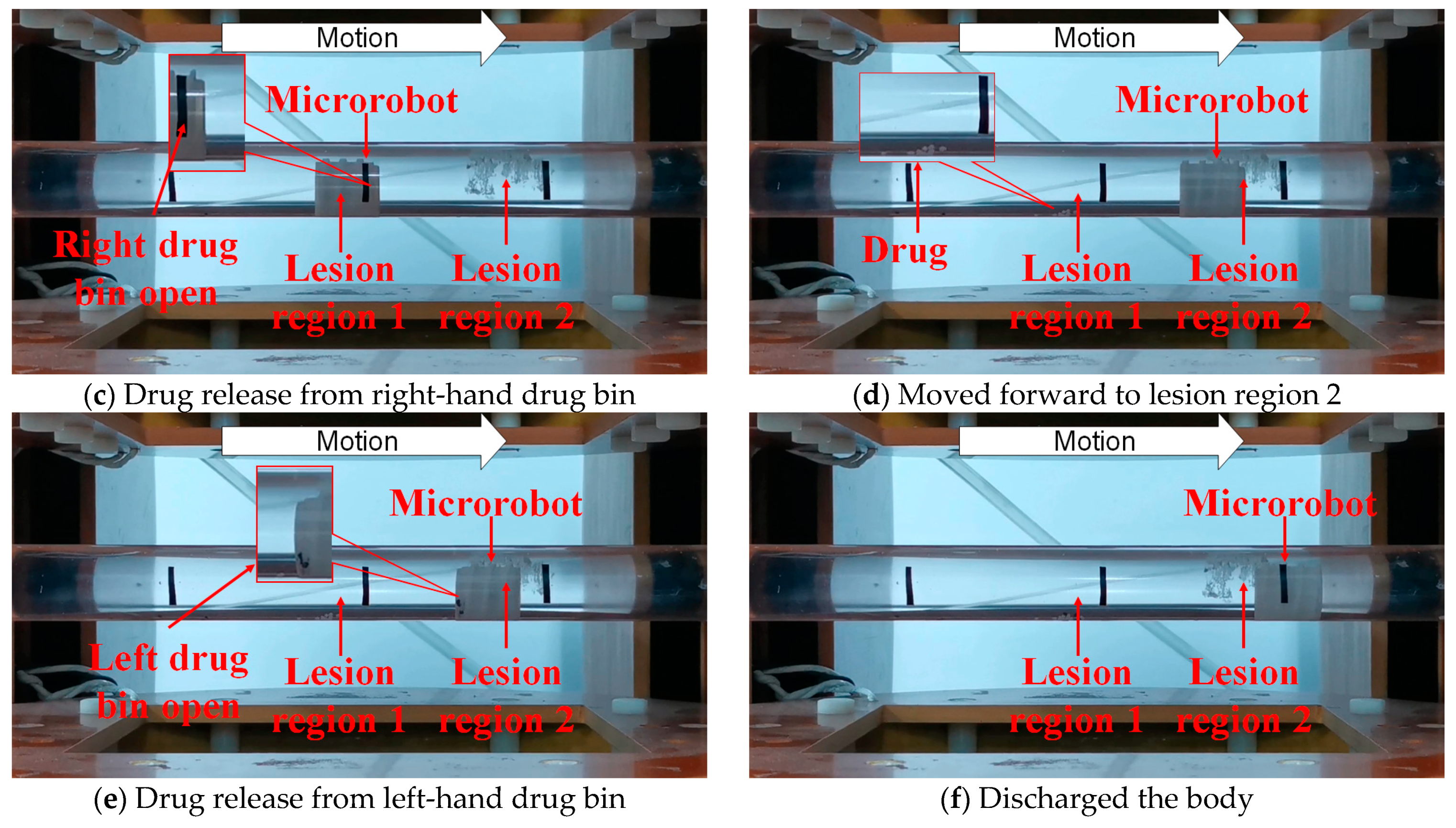
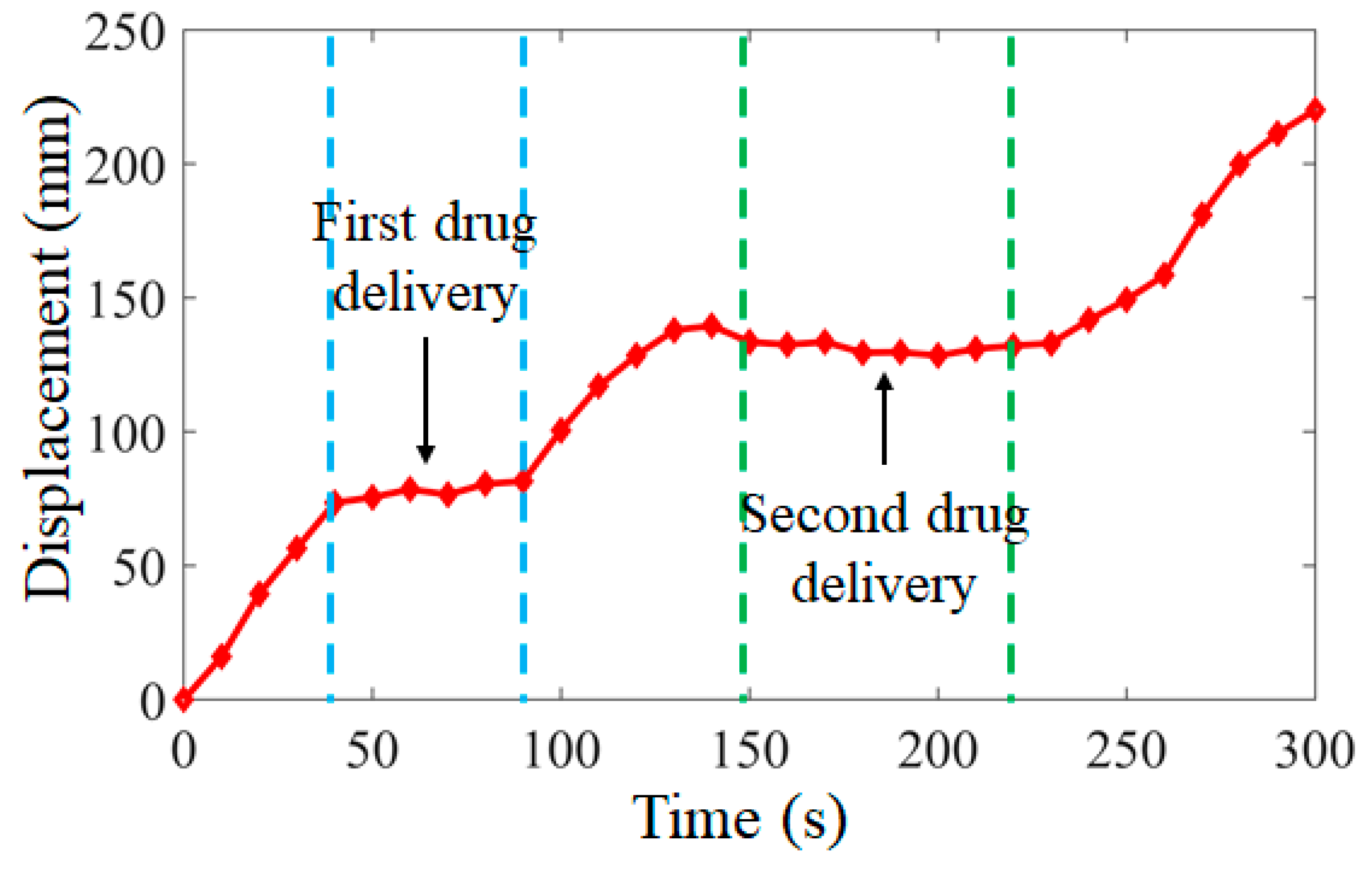
5.3. Microrobot Performs Drug Delivery Task
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Iddan, G.; Meron, G.; Glukhovsky, A.; Swain, P. Wireless Capsule Endoscopy. Nature 2000, 405, 417–418. [Google Scholar] [CrossRef]
- Simi, M.; Valdastri, P.; Quaglia, C.; Menciassi, A.; Dario, P. Design, Fabrication, and Testing of a Capsule with Hybrid Locomotion for Gastrointestinal Tract Exploration. IEEE/ASME Trans. Mechatron. 2010, 15, 170–180. [Google Scholar] [CrossRef] [Green Version]
- Valdastri, P.; Webster, I.R.J.; Quaglia, C.; Quirini, M.; Menciassi, A.; Dario, P. A New Mechanism for Mesoscale Legged Locomotion in Compliant Tubular Environments. IEEE Trans. Robot. 2009, 25, 1047–1057. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Vong, C.-I.; Wang, B.; Wu, X.; Zhang, L. Dynamic Morphology and Swimming Properties of Rotating Miniature Swimmers with Soft Tails. IEEE/ASME Trans. Mechatron. 2019, 24, 924–934. [Google Scholar] [CrossRef]
- Martel, S. Beyond imaging: Macro- and Microscale Medical Microrobots Mctuated by Mlinical MRI Scanners. Sci. Robot. 2017, 2, 8119. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Alici, G.; Than, T.D.; Li, W. Modeling and Experimental Characterization of Propulsion of a Spiral-Type Microrobot for Medical Use in Gastrointestinal Tract. IEEE Trans. Biomed. Eng. 2012, 60, 1751–1759. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Yue, H. The Mechanism of Action of Microrobots in Tumor Treatment. Int. J. Oncol. 2020, 47, 624–626. [Google Scholar]
- Koga, H.; Sakata, Y.; Hirose, S.; Konishi, S. Capsule Microrobot for Targeting in Medical Diagnostic Treatment. In Proceedings of the 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011; pp. 2835–2838. [Google Scholar]
- Beccani, M.; Di Natali, C.; Aiello, G.; Benjamin, C.; Susilo, E.; Valdastri, P. A Magnetic Drug Delivery Capsule Based on a Coil Actuation Mechanism. Procedia Eng. 2015, 120, 53–56. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.; Luo, Z.; Cui, H.; Wang, J.; Jiang, Q. A Novel and Reproducible Release Mechanism for a Drug-Delivery System in the Gastrointestinal Tract. Biomed. Microdevices 2019, 21, 25. [Google Scholar] [CrossRef]
- Fu, Q.; Zhang, S.; Guo, S.; Guo, J. Performance Evaluation of a Magnetically Actuated Capsule Microrobotic System for Medical Applications. Micromachines 2018, 9, 641. [Google Scholar] [CrossRef] [Green Version]
- Wang, X. Research on Localization Technology of Capsule Robot Based on Magnetic Dipole Model. Master’s Thesis, Tianjin University of Technology, Tianjin, China, 2021. [Google Scholar]
- Manfredi, L.; Capoccia, E.; Ciuti, G.; Cuschieri, A. A Soft Pneumatic Inchworm Double Balloon (SPID) for Colonoscopy. Sci. Rep. 2019, 9, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Yim, S.; Sitti, M. Design and Rolling Locomotion of a Magnetically Actuated Soft Capsule Endoscope. IEEE Trans. Robot. 2012, 28, 183–194. [Google Scholar] [CrossRef]
- Kim, S.H.; Ishiyama, K. Magnetic Robot and Manipulation for Active-Locomotion with Targeted Drug Release. IEEE/ASME Trans. Mechatron. 2013, 19, 1651–1659. [Google Scholar] [CrossRef]
- Le, V.H.; Rodriguez, H.L.; Lee, C.; Go, G.; Zhen, J.; Du Nguyen, V.; Choi, H.; Ko, S.Y.; Park, J.-O.; Park, S. A Soft-Magnet-based Drug-Delivery Module for Active Locomotive Intestinal Capsule Endoscopy Using an Electromagnetic Actuation System. Sens. Actuators A Phys. 2016, 243, 81–89. [Google Scholar] [CrossRef]
- Pham, D.M.; Aziz, S.M. A Real-Time Localization System for an Endoscopic Capsule Using Magnetic Sensors. Sensors 2014, 14, 20910–20929. [Google Scholar] [CrossRef] [Green Version]
- Bao, G.; Pahlavan, K.; Mi, L. Hybrid Localization of Microrobotic Endoscopic Capsule Inside Small Intestine by Data Fusion of Vision and RF Sensors. IEEE Sens. J. 2015, 15, 2669–2678. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, Z.; Yan, G. Locomotion Analysis of a Clamper-based Capsule Robot in a Compliant Tube. IEEE/ASME Trans. Mechatron. 2020, 26, 1. [Google Scholar] [CrossRef]
- Abbott, J.J.; Peyer, K.E.; Lagomarsino, M.C.; Zhang, L.; Dong, L.; Kaliakatsos, I.K.; Nelson, B. How Should Microrobots Swim? Int. J. Robot. Res. 2009, 28, 1434–1447. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, D.; Wang, D. Polarization Criteria Detection of a Generalized Spatial Universal Rotating Magnetic Vector. IEEE Trans. Magn. 2018, 54, 1–8. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, N.; Du, C.; Sun, Y.; Wang, D. Control Theorem of a Universal Uniform-Rotating Magnetic Vector for Capsule Microrobot in Curved Environment. Sci. China Technol. Sci. 2013, 56, 359–368. [Google Scholar] [CrossRef]
- Fu, Q.; Guo, S.; Huang, Q.; Hirata, H.; Ishihara, H. Development and Evaluation of Novel Magnetic Actuated Microrobot with Spiral Motion Using Electromagnetic Actuation System. J. Med. Biol. Eng. 2016, 36, 506–514. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, D.; Ruan, X.; Jiang, S.; Lu, J. Control Strategy for Multiple Capsule Robots in Intestine. Sci. China Ser. E Technol. Sci. 2011, 54, 3098–3108. [Google Scholar] [CrossRef]
- Tang, P.; Liang, L.; Guo, Z.; Liu, Y.; Hu, G. Orthogonal Optimal Design of Multiple Parameters of a Magnetically Controlled Capsule Robot. Micromachines 2021, 12, 802. [Google Scholar] [CrossRef]
- ANSYS. ANSYS Academic Research, Release 19.1; ANSYS: Canonsburg, PA, USA, 2020. [Google Scholar]
- Fu, Q.; Guo, S.; Yamauchi, Y.; Hirata, H.; Ishihara, H. A Novel Hybrid Microrobot Using Rotational Magnetic Field for Medical Applications. Biomed. Microdevices 2015, 17, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Fu, Q.; Guo, S.; Zhang, S.; Hirata, H.; Ishihara, H. Characteristic Evaluation of a Shrouded Propeller Mechanism for a Magnetic Actuated Microrobot. Micromachines 2015, 6, 1272–1288. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microrobot | Parameter |
|---|---|
| Diameter of microrobot (mm) | 9.5 |
| Length of microrobot (mm) | 24 |
| Weight of microrobot (g) | 4.0 |
| Thickness of spiral structure (mm) | 2 |
| Pitch of spiral structure (mm) | 6.6 |
| Height of spiral structure (mm) | 1 |
| Material of body | Photosensitive resin |
| Size of permanent magnet (mm × mm × mm) | 6 × 3 × 4 |
| Weight of permanent magnet (g) | 1.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Z.; Fu, Q.; Zhang, S.; Fan, C.; Zhang, X.; Guo, J.; Guo, S. Performance Evaluation of a Magnetically Driven Microrobot for Targeted Drug Delivery. Micromachines 2021, 12, 1210. https://doi.org/10.3390/mi12101210
Cai Z, Fu Q, Zhang S, Fan C, Zhang X, Guo J, Guo S. Performance Evaluation of a Magnetically Driven Microrobot for Targeted Drug Delivery. Micromachines. 2021; 12(10):1210. https://doi.org/10.3390/mi12101210
Chicago/Turabian StyleCai, Zhuocong, Qiang Fu, Songyuan Zhang, Chunliu Fan, Xi Zhang, Jian Guo, and Shuxiang Guo. 2021. "Performance Evaluation of a Magnetically Driven Microrobot for Targeted Drug Delivery" Micromachines 12, no. 10: 1210. https://doi.org/10.3390/mi12101210
APA StyleCai, Z., Fu, Q., Zhang, S., Fan, C., Zhang, X., Guo, J., & Guo, S. (2021). Performance Evaluation of a Magnetically Driven Microrobot for Targeted Drug Delivery. Micromachines, 12(10), 1210. https://doi.org/10.3390/mi12101210