Attitude and Heading Estimation for Indoor Positioning Based on the Adaptive Cubature Kalman Filter



Abstract
1. Introduction
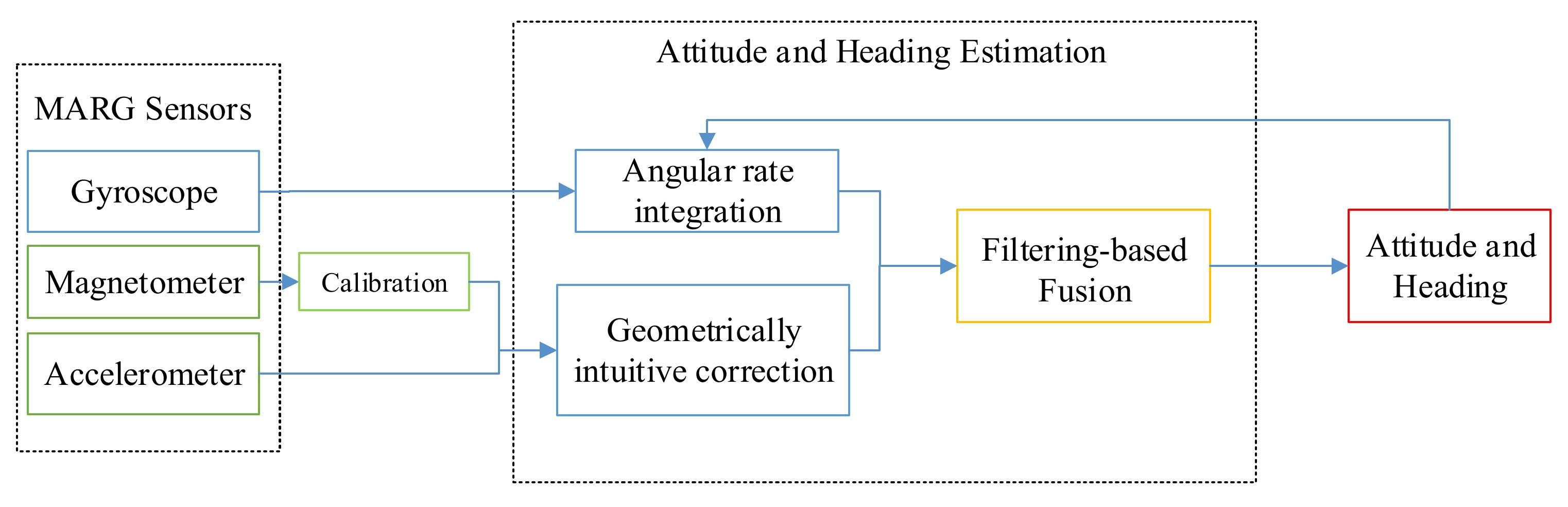
2. Methodology
2.1. Attitude and Heading in the Form of a Quaternion
2.2. Attitude and Heading Estimation with Readings of a Gyroscope
2.3. Attitude and Heading Estimation with Readings of an Accelerometer and a Magnetometer
3. Quaternion-Based Adaptive Cubature Kalman Filter Algorithm for Attitude and Heading Estimation
3.1. Measuring and State Model
3.2. Conventional Cubature Kalman Filter Algorithm
3.2.1. Cubature Rule
3.2.2. Cubature Kalman Filter Algorithm Process
3.3. Adaptive Cubature Kalman Filter Algorithm
4. Experiments and Result Analysis
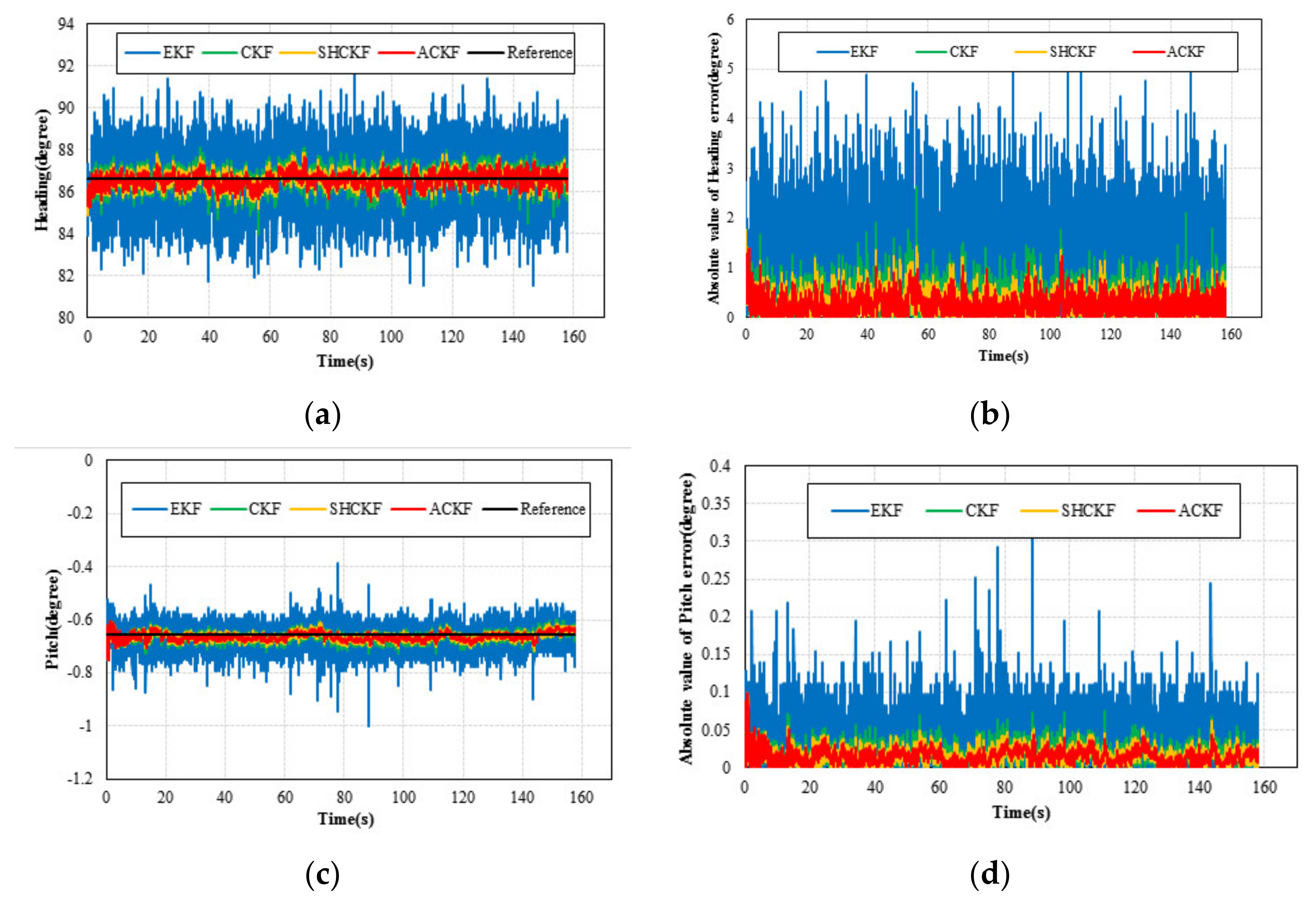
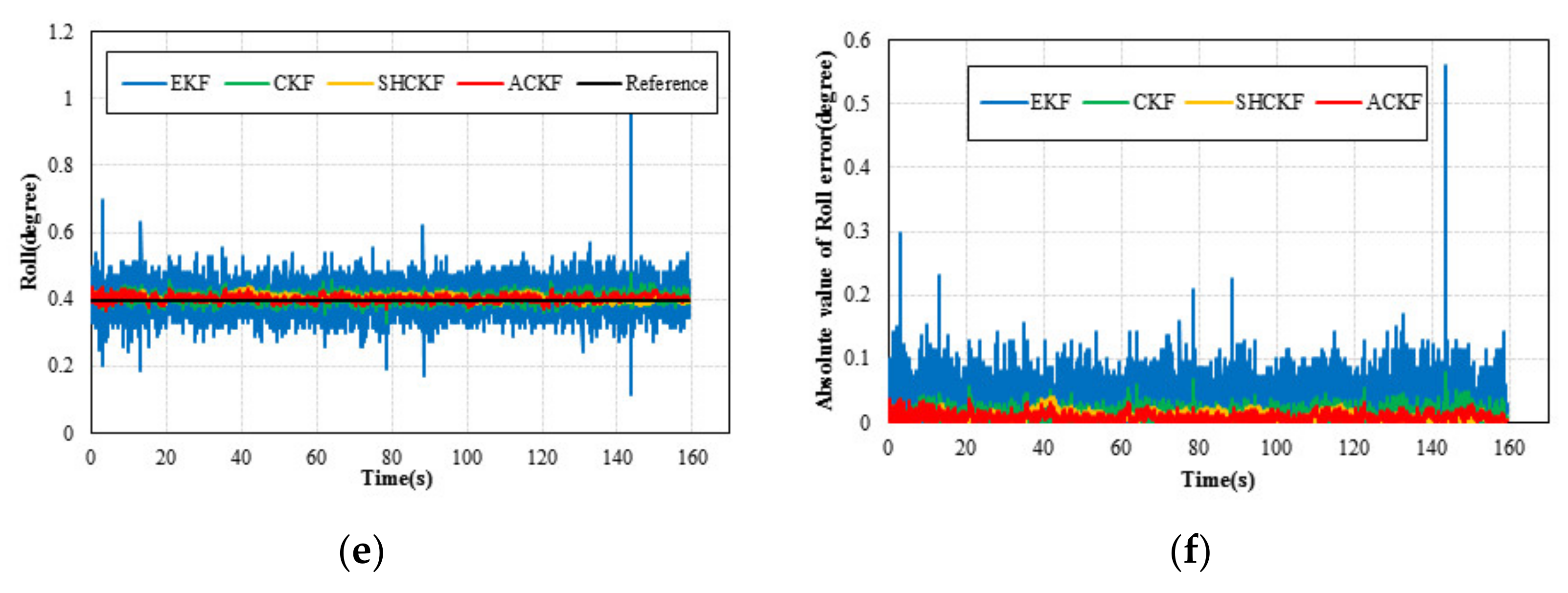
4.1. Experiment in the Static Condition and Result Analysis
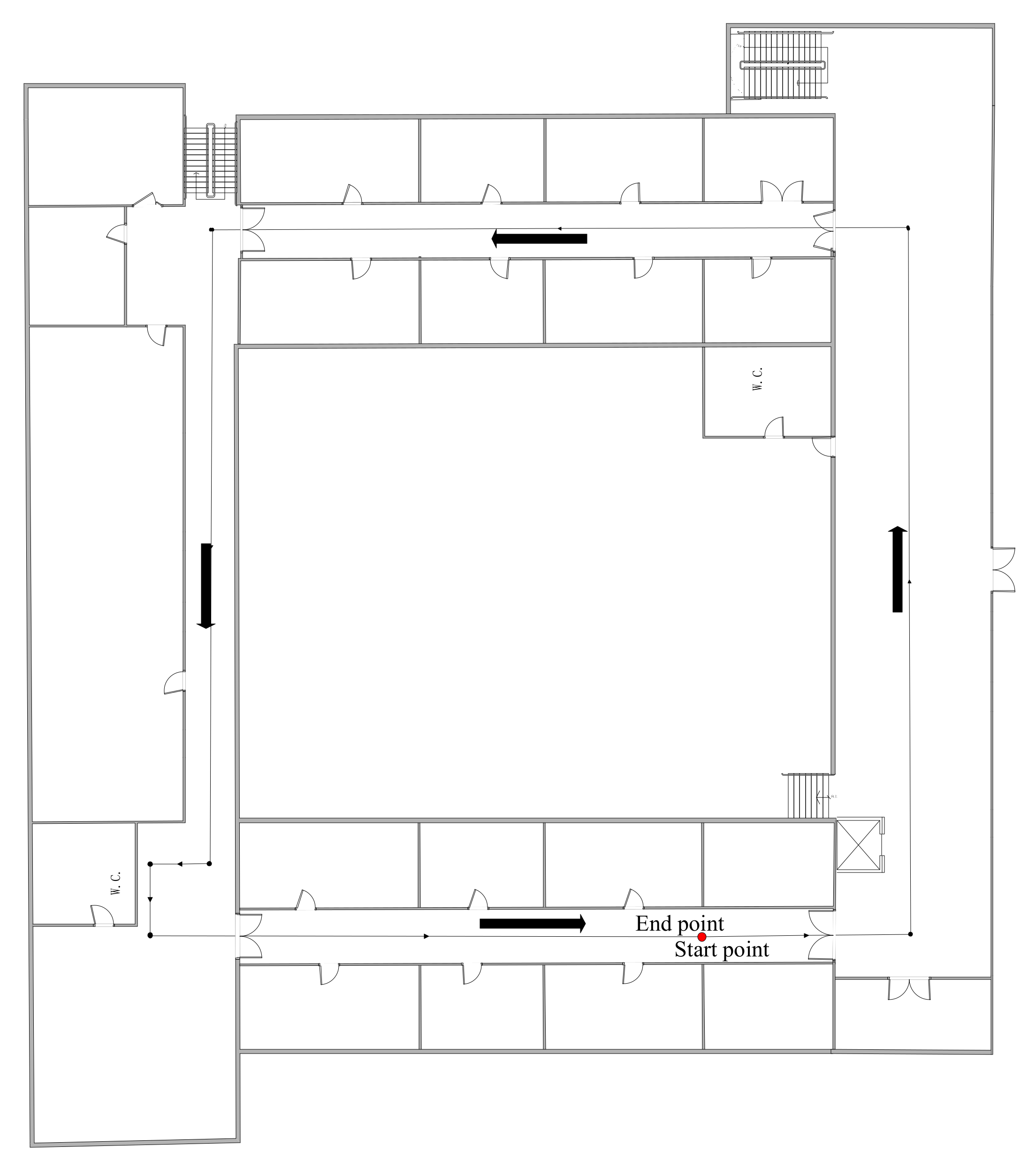
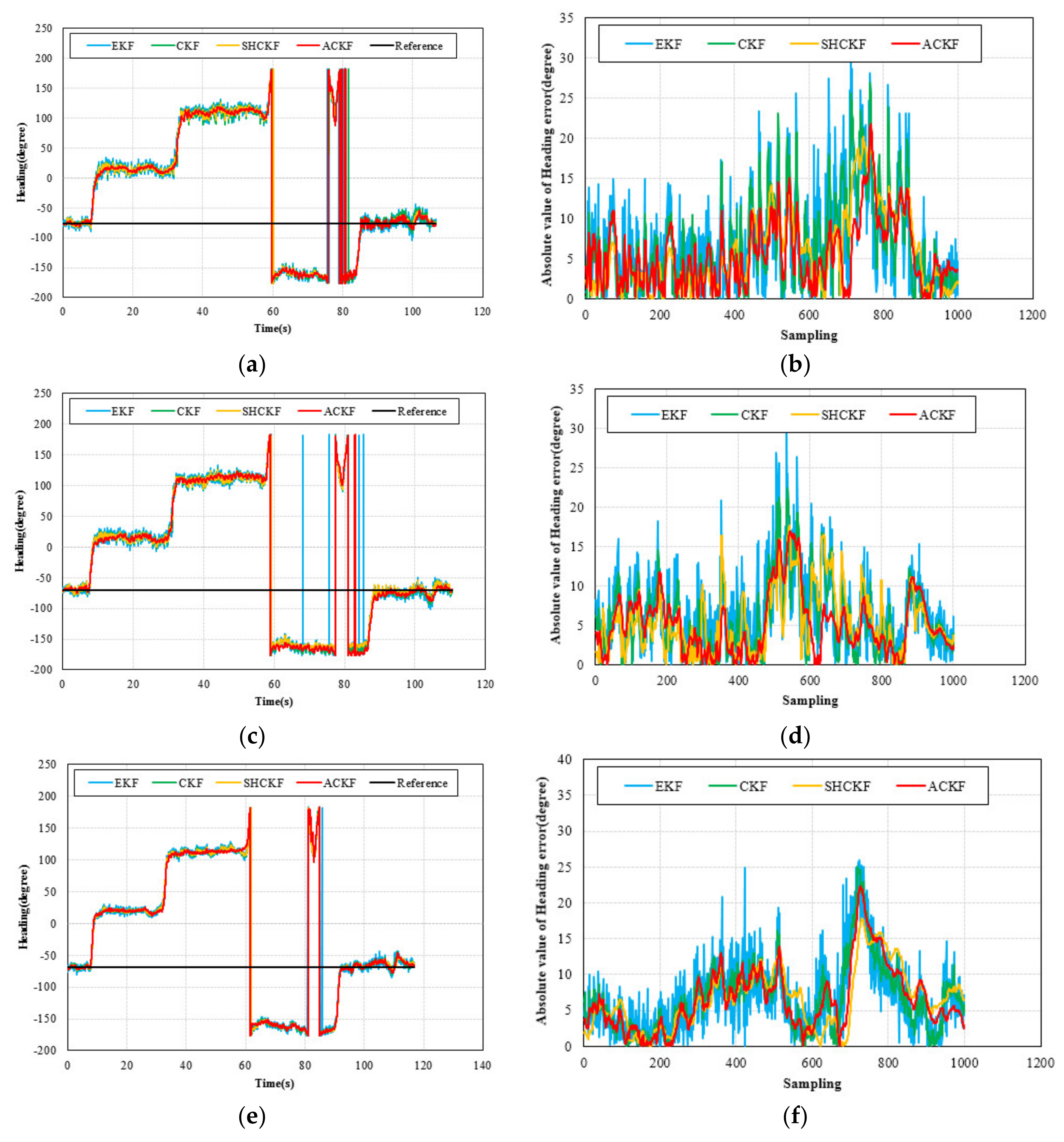
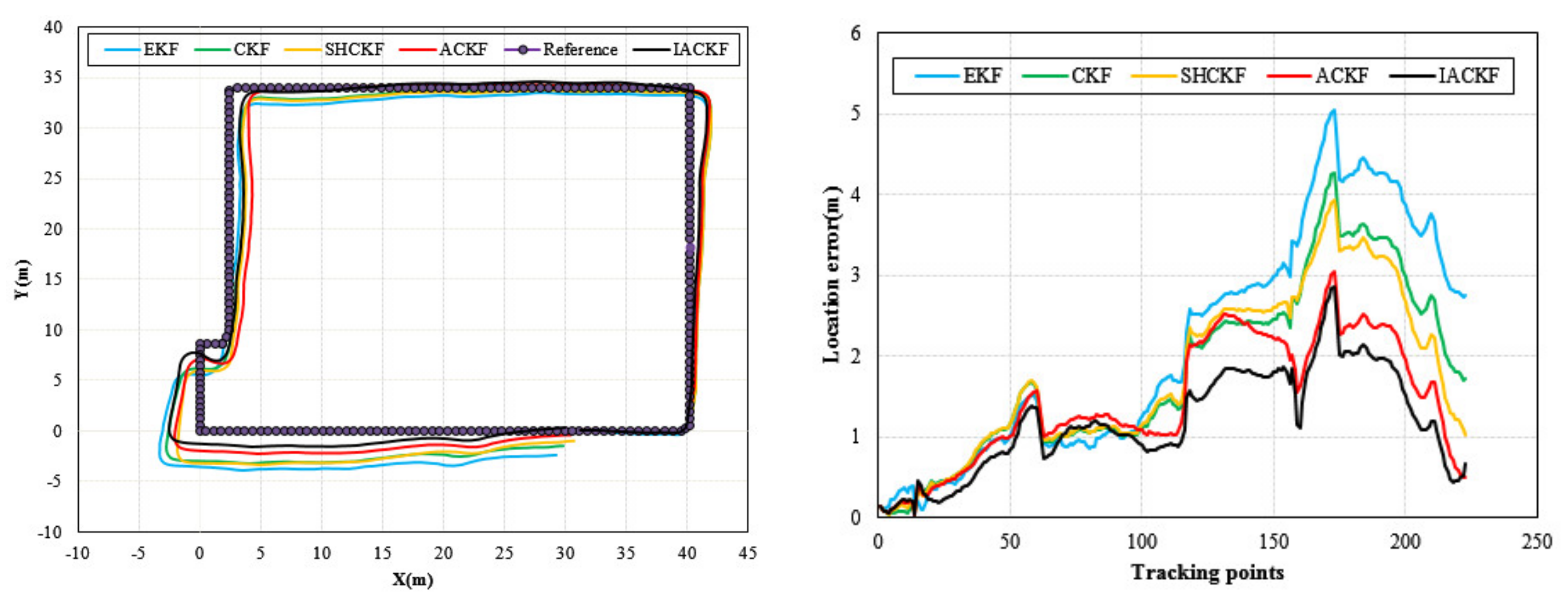
4.2. Experiment in the Dynamic Condition and Result Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Arana, O.; Garcia, F.; Gomez, J.; Rangel, V. MSP: Providing Location Privacy in WLAN Networks with a MAC Swapping Protocol. Comput. Netw. 2018, 138, 136–148. [Google Scholar] [CrossRef]
- Deng, Z.A.; Hu, Y.; Yu, J.; Na, Z. Extended Kalman Filter for Real Time Indoor Localization by Fusing WiFi and Smartphone Inertial Sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, W.; Jiang, T. WiFi-Inertial Indoor Pose Estimation for Micro Aerial Vehicles. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. WiFi-Aided Magnetic Matching for Indoor Navigation with Consumer Portable Devices. Micromachines 2015, 6, 747–764. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kröger, T.; Chen, R. Bayesian fusion for indoor positioning using bluetooth fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- Pušnik, M.; Galun, M.; Šumak, B. Improved Bluetooth Low Energy Sensor Detection for Indoor Localization Services. Sensors 2020, 20, 2336. [Google Scholar] [CrossRef]
- Yadav, R.K.; Bhattarai, B.; Gang, H.S.; Pyun, J.Y. Trusted K Nearest Bayesian Estimation for Indoor Positioning System. IEEE Access 2019, 7, 51484–51498. [Google Scholar] [CrossRef]
- Hong, J.; Kim, K.J.; Kim, C.G. Comparison of Indoor Positioning System Using Wi-Fi and UWB. In Proceedings of the Asian Conference on Intelligent Information and Database Systems, Dong Hoi City, Vietnam, 19–21 March 2018; pp. 623–632. [Google Scholar]
- Li, X.; Wang, Y.; Khoshelham, K. Comparative analysis of robust extended Kalman filter and incremental smoothing for UWB/PDR fusion positioning in NLOS environments. Acta Geod. Geophys. 2019, 54, 157–179. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, J.; Wang, J.; Han, H.; Yang, D. An UWB/Vision Fusion Scheme for Determining Pedestrians’ Indoor Location. Sensors 2020, 20, 1139. [Google Scholar] [CrossRef]
- Huang, L.; Li, H.; Yu, B.; Gan, X.; Wang, B.; Li, Y.; Zhu, R. Combination of Smartphone MEMS Sensors and Environmental Prior Information for Pedestrian Indoor Positioning. Sensors 2020, 20, 2263. [Google Scholar] [CrossRef]
- Wang, B.; Liu, X.; Yu, B.; Jia, R.; Huang, L. Posture Recognition and Heading Estimation Based on Machine Learning Using MEMS Sensors. In Proceedings of the International Conference on Artificial Intelligence for Communications and Networks, Harbin, China, 25–26 May 2019; pp. 496–508. [Google Scholar]
- Combettes, C.; Renaudin, V. Delay Kalman Filter to Estimate the Attitude of a Mobile Object with Indoor Magnetic Field Gradients. Micromachines 2016, 7, 79. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y.; Zhang, Y.; Huang, Y.; Wang, Z.; Fu, H. Novel WiFi/MEMS Integrated Indoor Navigation System Based on Two-Stage EKF. Micromachines 2019, 10, 198. [Google Scholar] [CrossRef]
- Dongjin, W.; Linyuan, X.; Jijun, G.; Qingyi, P. Robust Adaptive Extended Kalman Filtering for Smart Phone-based Pedestrian Dead Reckoning Systems. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J.; Che, X.; Zhang, X.; Hu, C.; Feng, K.; Xu, T. The Optimal Design of Modulation Angular Rate for MEMS-Based Rotary Semi-SINS. Micromachines 2019, 10, 111. [Google Scholar] [CrossRef] [PubMed]
- Fan, B.; Li, Q.; Liu, T. How Magnetic Disturbance Influences the Attitude and Heading in Magnetic and Inertial Sensor-Based Orientation Estimation. Sensors 2018, 18, 76. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Fang, X.; Zhou, M.; Li, L. Smartphone-Based Indoor Integrated WiFi/MEMS Positioning Algorithm in a Multi-Floor Environment. Micromachines 2015, 6, 347–363. [Google Scholar] [CrossRef]
- Li, X.; Wei, D.; Lai, Q.; Xu, Y.; Yuan, H. Smartphone-based integrated PDR/GPS/Bluetooth pedestrian location. Adv. Space Res. 2017, 59, 877–887. [Google Scholar] [CrossRef]
- Ren, M.; Guo, H.; Shi, J.; Meng, J. Indoor Pedestrian Navigation Based on Conditional Random Field Algorithm. Micromachines 2017, 8, 320. [Google Scholar] [CrossRef]
- Luo, R.C.; Lai, C.C. Enriched Indoor Map Construction Based on Multisensor Fusion Approach for Intelligent Service Robot. IEEE Trans. Ind. Electron. 2012, 59, 3135–3145. [Google Scholar] [CrossRef]
- Amanatiadis, A. A Multisensor Indoor Localization System for Biped Robots Operating in Industrial Environments. IEEE Trans. Ind. Electron. 2016, 63, 7597–7606. [Google Scholar] [CrossRef]
- Teuliere, C.; Marchand, E.; Eck, L. 3-D Model-Based Tracking for UAV Indoor Localization. IEEE Trans. Cybern. 2017, 45, 869–879. [Google Scholar] [CrossRef]
- Zhuang, Y.; Lan, H.; Li, Y.; El-Sheimy, N. PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation. Micromachines 2015, 6, 793–812. [Google Scholar] [CrossRef]
- Wu, D.; Xia, L.; Geng, J. Heading Estimation for Pedestrian Dead Reckoning Based on Robust Adaptive Kalman Filtering. Sensors 2018, 18, 1970. [Google Scholar] [CrossRef] [PubMed]
- Niu, X.; Ban, Y.; Zhang, Q.; Zhang, T.; Zhang, H.; Liu, J. Quantitative Analysis to the Impacts of IMU Quality in GPS/INS Deep Integration. Micromachines 2015, 6, 1082–1099. [Google Scholar] [CrossRef]
- Wang, H.; Liu, N.; Su, Z.; Li, Q. Research on Low-Cost Attitude Estimation for MINS/Dual-Antenna GNSS Integrated Navigation Method. Micromachines 2019, 10, 362. [Google Scholar] [CrossRef] [PubMed]
- Garcia, R.V.; Kuga, H.K.; Silva, W.R. Unscented Kalman filter and smoothing applied to attitude estimation of artificial satellites. Comput. Appl. Math. 2018, 37, 1–10. [Google Scholar] [CrossRef]
- Zhang, W.J.; Wang, S.Y.; Feng, Y.L.; Feng, J.C. Huber-based high-degree cubature Kalman tracking algorithm. Acta Phys. Sin. 2016, 65. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Yu, F.; Sun, Q.; Lv, C.; Ben, Y.; Fu, Y. A SLAM algorithm based on adaptive cubature kalman filter. Math. Probl. Eng. 2014, 2014, 171958. [Google Scholar] [CrossRef]
- Liu, M.; Lai, J.; Li, Z.; Liu, J. An adaptive cubature Kalman filter algorithm for inertial and land-based navigation system. Aerosp. Sci. Technol. 2016, 51, 52–60. [Google Scholar] [CrossRef]
- Miao, Z.Y.; Lv, Y.L.; Xu, D.J.; Shen, F.; Pang, S.W. Analysis of a variational Bayesian adaptive cubature Kalman filter tracking loop for high dynamic conditions. GPS Solutions 2017, 21, 111–122. [Google Scholar] [CrossRef]
- Shen, F.; Xu, G. An enhanced UWB-based range/GPS cooperative positioning approach using adaptive variational Bayesian cubature Kalman filtering. Math. Probl. Eng. 2015, 2015, 843719. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Y.; Li, N.; Zhao, L. Embedded cubature Kalman filter with adaptive setting of free parameter. Signal Process. 2015, 114, 112–116. [Google Scholar] [CrossRef]
- Mu, J.; Cai, Y. Likelihood-based iteration square-root cubature Kalman filter with applications to state estimation of re-entry ballistic target. Trans. Inst. Meas. Control. 2013, 35, 949–958. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, J.; Yu, T.; Jian, H.; Liu, T. Design of adaptive robust square-root cubature Kalman filter with noise statistic estimator. Appl. Math. Comput. 2015, 256, 352–367. [Google Scholar] [CrossRef]
- Tang, X.; Wei, J.; Chen, K. Square-root adaptive cubature Kalman filter with application to spacecraft attitude estimation. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 1406–1412. [Google Scholar]
- Xu, T.; Jiang, N.; Sun, Z. An improved adaptive Sage filter with applications in GEO orbit determination and GPS kinematic positioning. Sci. China Phys. Mech. Astron. 2012, 55, 892–898. [Google Scholar] [CrossRef]
- Deng, Z.A.; Wang, G.; Hu, Y.; Wu, D. Heading estimation for indoor pedestrian navigation using a smartphone in the pocket. Sensors 2015, 15, 21518–21536. [Google Scholar] [CrossRef]
- Qin, Y. Inertial Navigation; Science Press: Beijing, China, 2014. [Google Scholar]
- Yoo, T.S.; Hong, S.K.; Yoon, H.M.; Park, S. Gain-scheduled complementary filter design for a MEMS based attitude and heading reference system. Sensors 2011, 11, 3816–3830. [Google Scholar] [CrossRef]
- Tseng, C.H.; Lin, S.F.; Jwo, D.J. Fuzzy adaptive cubature Kalman filter for integrated navigation systems. Sensors 2016, 16, 1167. [Google Scholar] [CrossRef]
- Cui, N.; Zhang, L.; Wang, X.; Yang, F.; Lu, B. Application of adaptive high-degree cubature Kalman filter in target tracking. Acta Aeronaut. Astronaut. Sin. 2015, 36, 3885–3895. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Cai, B. Study on information fusion algorithm in embedded integrated navigation system. In Proceedings of the 2008 International Conference on Intelligent Computation Technology and Automation (ICICTA), Hunan, China, 20–22 October 2008. [Google Scholar]
- Sage, A.P.; Husa, G.W. Algorithms for sequential adaptive estimation of prior statistics. In Proceedings of the 1969 IEEE Symposium on Adaptive Processes (8th) Decision and Control, University Park, PA, USA, 17–19 November 1969. [Google Scholar]
- Chen, W.; Chen, R.; Chen, Y.; Kuusniemi, H.; Wang, J. An effective Pedestrian Dead Reckoning algorithm using a unified heading error model. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Palm Springs, CA, USA, 4–6 May 2010; pp. 340–347. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
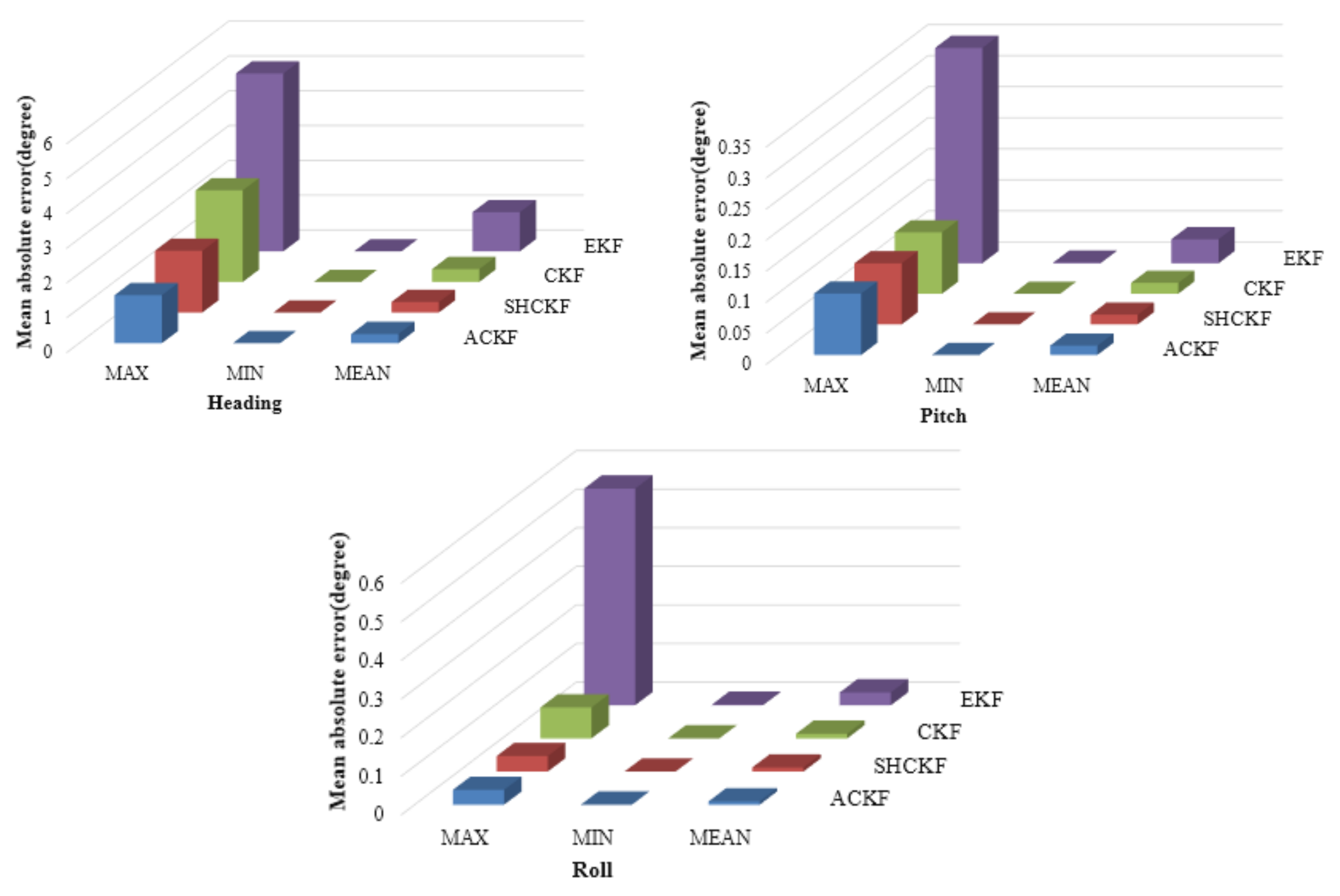
| Error Metrics | ACKF | SHCKF | CKF | EKF | |
|---|---|---|---|---|---|
| The absolute value of Heading error (degree) | Max | 1.3793 | 1.7745 | 2.6325 | 5.1126 |
| Min | 0.0000 | 0.0000 | 0.0000 | 0.0001 | |
| Mean | 0.2641 | 0.3043 | 0.3704 | 1.1261 | |
| The absolute value of Pitch error (degree) | Max | 0.0989 | 0.0984 | 0.0990 | 0.3469 |
| Min | 0.0000 | 0.0000 | 0.0000 | 0.0010 | |
| Mean | 0.0150 | 0.0157 | 0.0176 | 0.0387 | |
| The absolute value of Roll error (degree) | Max | 0.0385 | 0.0403 | 0.0802 | 0.5616 |
| Min | 0.0000 | 0.0000 | 0.0000 | 0.0018 | |
| Mean | 0.0087 | 0.0105 | 0.0122 | 0.0334 |
| Participant | Sex | Height (m) | Weight (kg) | S |
|---|---|---|---|---|
| 1 | Male | 1.75 | 87 | 0.48 |
| 2 | Female | 1.72 | 80 | 0.48 |
| 3 | Male | 173 | 80 | 0.46 |
| Participant | Error Metrics | ACKF | SHCKF | CKF | EKF |
|---|---|---|---|---|---|
| First | Mean | 5.4628 | 5.8802 | 6.7118 | 6.8883 |
| Second | Mean | 5.1625 | 5.4881 | 5.8480 | 6.4277 |
| Third | Mean | 6.5167 | 6.6284 | 6.6687 | 6.6890 |
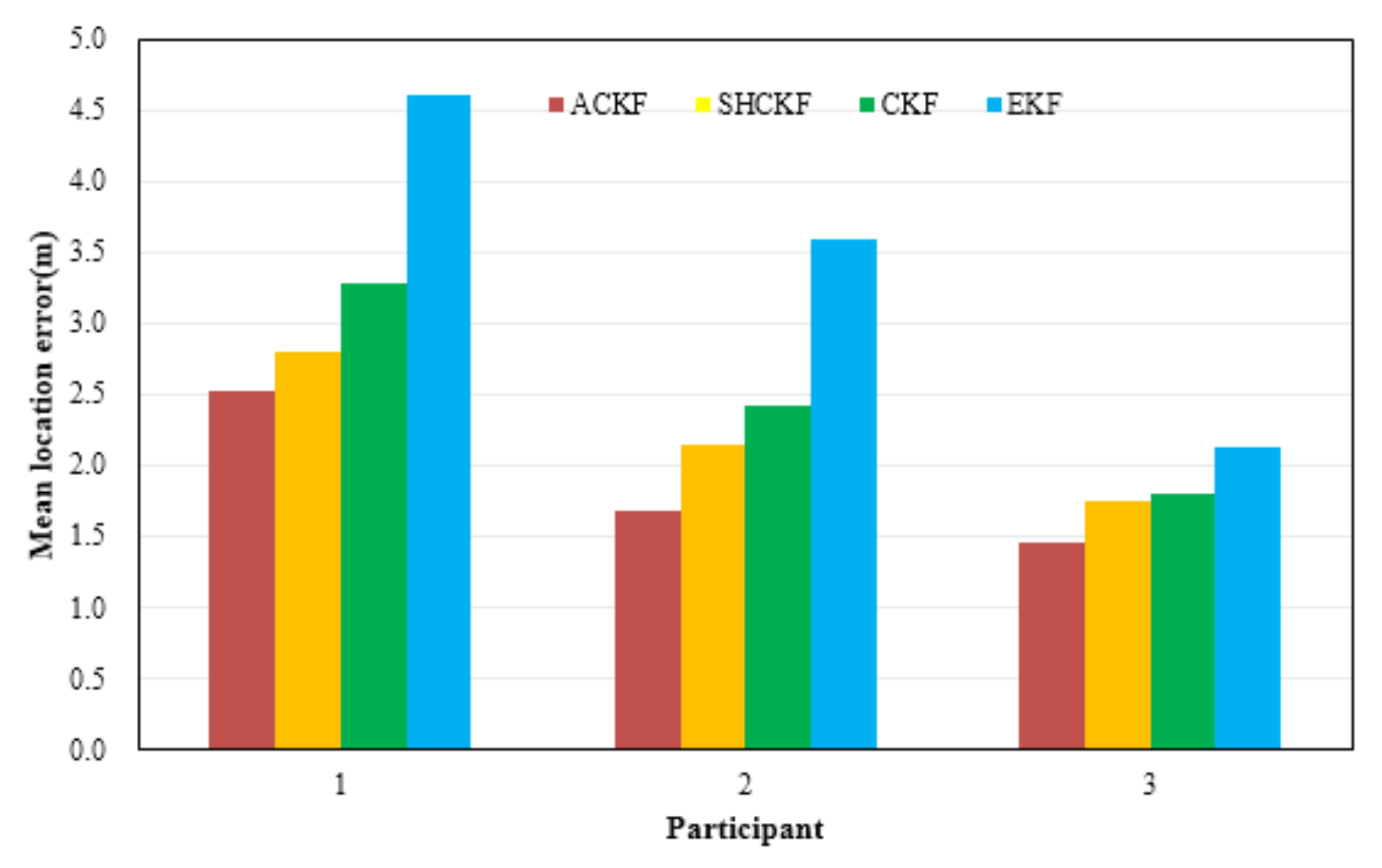
| Participant | Error Metrics | ACKF | SHCKF | CKF | EKF |
|---|---|---|---|---|---|
| First | Mean | 2.5227 | 2.8005 | 3.2866 | 4.6148 |
| Second | Mean | 1.6805 | 2.1441 | 2.4185 | 3.5855 |
| Third | Mean | 1.4508 | 1.7556 | 1.8089 | 2.1353 |
| Error Metrics | IACKF | ACKF | SHCKF | CKF | EKF |
|---|---|---|---|---|---|
| Mean (m) | 1.1813 | 1.4508 | 1.7556 | 1.8089 | 2.1353 |
| Standard Deviation (m) | 0.6382 | 0.7646 | 1.0282 | 1.0900 | 1.4251 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, J.; Xia, L.; Wu, D. Attitude and Heading Estimation for Indoor Positioning Based on the Adaptive Cubature Kalman Filter. Micromachines 2021, 12, 79. https://doi.org/10.3390/mi12010079
Geng J, Xia L, Wu D. Attitude and Heading Estimation for Indoor Positioning Based on the Adaptive Cubature Kalman Filter. Micromachines. 2021; 12(1):79. https://doi.org/10.3390/mi12010079
Chicago/Turabian StyleGeng, Jijun, Linyuan Xia, and Dongjin Wu. 2021. "Attitude and Heading Estimation for Indoor Positioning Based on the Adaptive Cubature Kalman Filter" Micromachines 12, no. 1: 79. https://doi.org/10.3390/mi12010079
APA StyleGeng, J., Xia, L., & Wu, D. (2021). Attitude and Heading Estimation for Indoor Positioning Based on the Adaptive Cubature Kalman Filter. Micromachines, 12(1), 79. https://doi.org/10.3390/mi12010079