1. Introduction
As an intelligent control strategy, iterative learning (IL) control has a simple structure and doesn’t require accurate system modeling. According to past control experience, this method can improve the current control performance of the system by operating repetitively over a fixed time interval [
1]. In 1978, IL control was first proposed by Uchiyama in Japanese [
2], which did not receive much attention. After one critical report published by Arimoto in English [
3], IL control made significant progress in both theories and applications [
4,
5]. Practically, IL control has been applied to a wide range of engineering applications, including flexible structures [
6], nonholonomic mobile robots [
7], flapping wing micro aerial vehicles [
8] and the sheet metal forming process [
9]. Considering the repeatability of the structural dynamic response in the vibration process, IL control is expected to provide a feasible solution for the control issue here. Several research groups have applied IL control methods to the active vibration control of piezoelectric smart structures. Zhu et al. [
10] and Tavakolpour et al. [
11] first applied P-type IL control for the attenuation of vibrations in piezoelectric smart structures for the design of the feedback gain, and the efficiency of P-type IL control was proven in their papers. In addition, Fadil et al. [
12] proposed a new intelligent proportional-integral-derivative (PID) controller for vibration suppression by using P-type IL control and PID control, in which the P-type IL control was applied to tune the parameters of the PID controller.
In the studies above, although P-type IL controllers can effectively attenuate structural vibrations at some excitation frequencies, the performances of the controllers for vibration suppression are still not obvious when the piezoelectric smart structure is excited by its first natural frequency. Besides, the control effectiveness of the actuators is obvious at the locations of the sensors, and they are not able to effectively compensate for unwanted vibrations at other locations [
13]. Moreover, thousands of iterations in P-type IL control are needed for achieving satisfactory control precision, leading to the slow learning speed [
11,
14]. In addition, the learning process should be accomplished within a limited period, as overlearning may lead to system instability [
11]. Therefore, the iterative number should be limited to a predefined value. Finally, the unreasonable selections of learning gains may directly lead to control spillover or system instability [
15].
For accelerating the convergence rate and improving the stability of the learning algorithm, adaptive control is needed to modify the learning process of the P-type IL control. Adaptive control has been successfully incorporated into various learning algorithms for the adjustment of parameters of the learning process [
16,
17]. Effective adaptive control strategies are necessary for the ability to automatically tune parameters to the desired performance at each sampling period, such as an internal model control method with an adaptive algorithm, implemented to reduce fatigue loads and tower vibrations in wind turbines [
18]. A real-time control implementation, based on an auto-tuning finite impulse response filter, was applied to active vibration isolation [
19]. An online method that tunes the poles of the controller was proposed to adapt to the errors between a real object and its model [
20]. An adaptive voltage and frequency control method was proposed for inverter-based distributed generations in a multi-microgrid structure [
21]. A characteristic model-based nonlinear golden section adaptive control method was presented for vibration suppression in a flexible Cartesian smart material robot [
22].
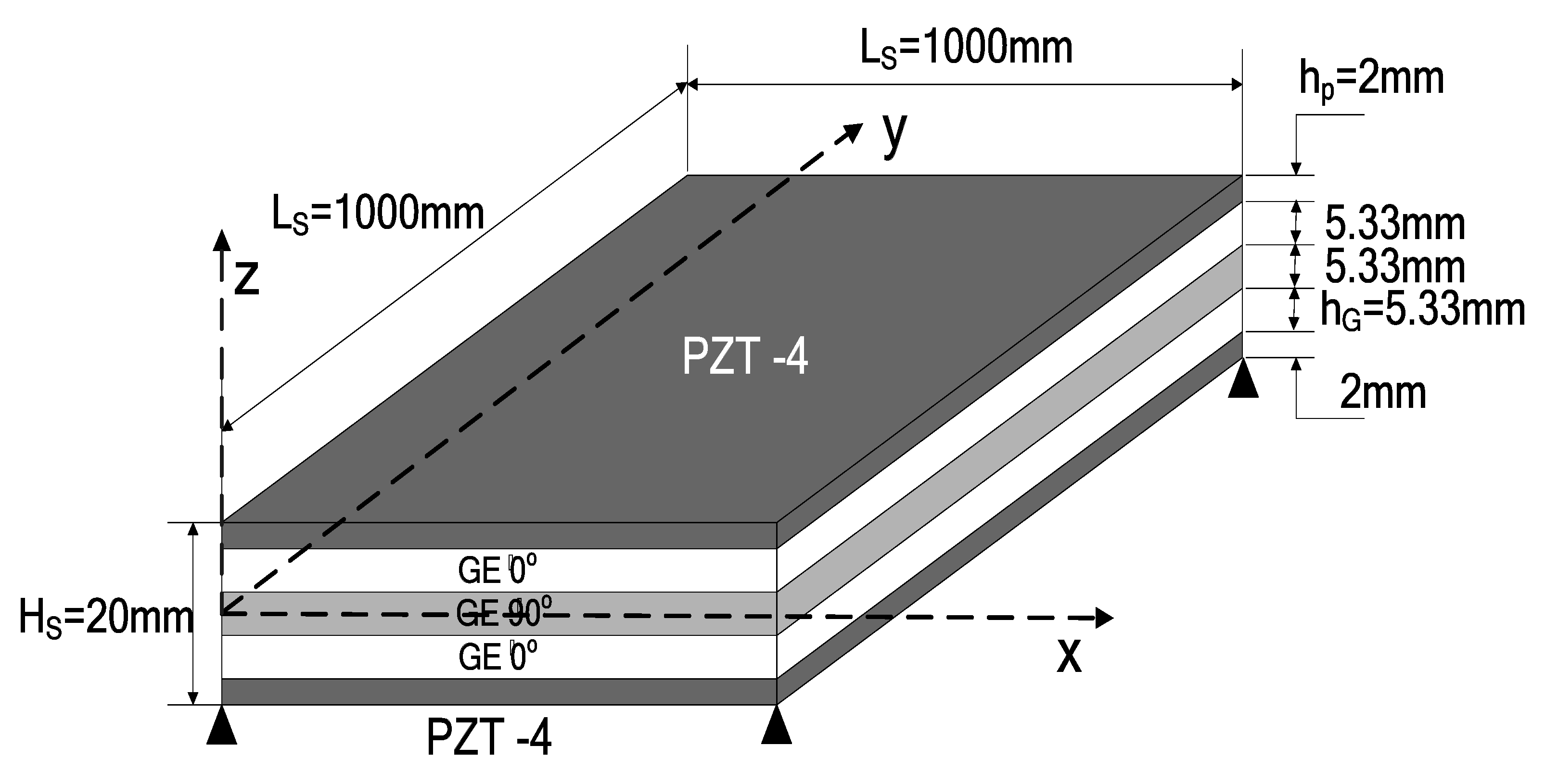
As mentioned above, most of the adaptive control methods are model-based, in which the dynamic model of system has been already known before the design of the controller. However, for complex practical systems, the mechanism models of the plants are often difficult to establish, and the parameters are also hard to identify, making the design and application of controllers unpractical. Controlling vibrations in plate and shell structures always brings a challenge because of the complexity and density of the vibration modes. The strategy of using piezoelectric actuator-sensor pairs with discrete locations, glued on both surfaces of the plate, realizes a low weight and effective control for structural vibration [
23]. The plate-integrated piezoelectric actuator-sensor pairs thus become a multi-input-multi-output (MIMO) system. If an actuator fails to perform as expected, the performance of its neighboring actuators will be negatively affected. In this system, the interaction among all actuators exists in the whole process of active vibration control, and this kind of interaction is always uncertain. The uncertainty caused by this interaction greatly presents a great challenge when designing a controller, and the model-based adaptive controller cannot deal with these conditions. Data-driven control methods, which are designed by directly using input and output (I/O) data of the system, can serve as an efficient alternative. The control problems caused by time-varying parameters and uncertainties of the model are challenging for model-based control, but not with data-driven control approaches [
24].
Model free adaptive (MFA) control, as an effective data-driven control method, is an attractive technique which has gained a large amount of interest in recent years. It is easily implemented, with small computational burden for its simple structure and strong robustness. Unlike the neural-network-based adaptive control methods and model-based methods, no additional signal testing or training processes are required during the design of data-driven control methods. Instead of identifying the model of the plant, the MFA method builds an equivalent linearization of the data at each operation by introducing a novel concept named the pseudo-partial derivative (PPD), and the time-varying PPD can be estimated by merely using the I/O measurements of the plant.
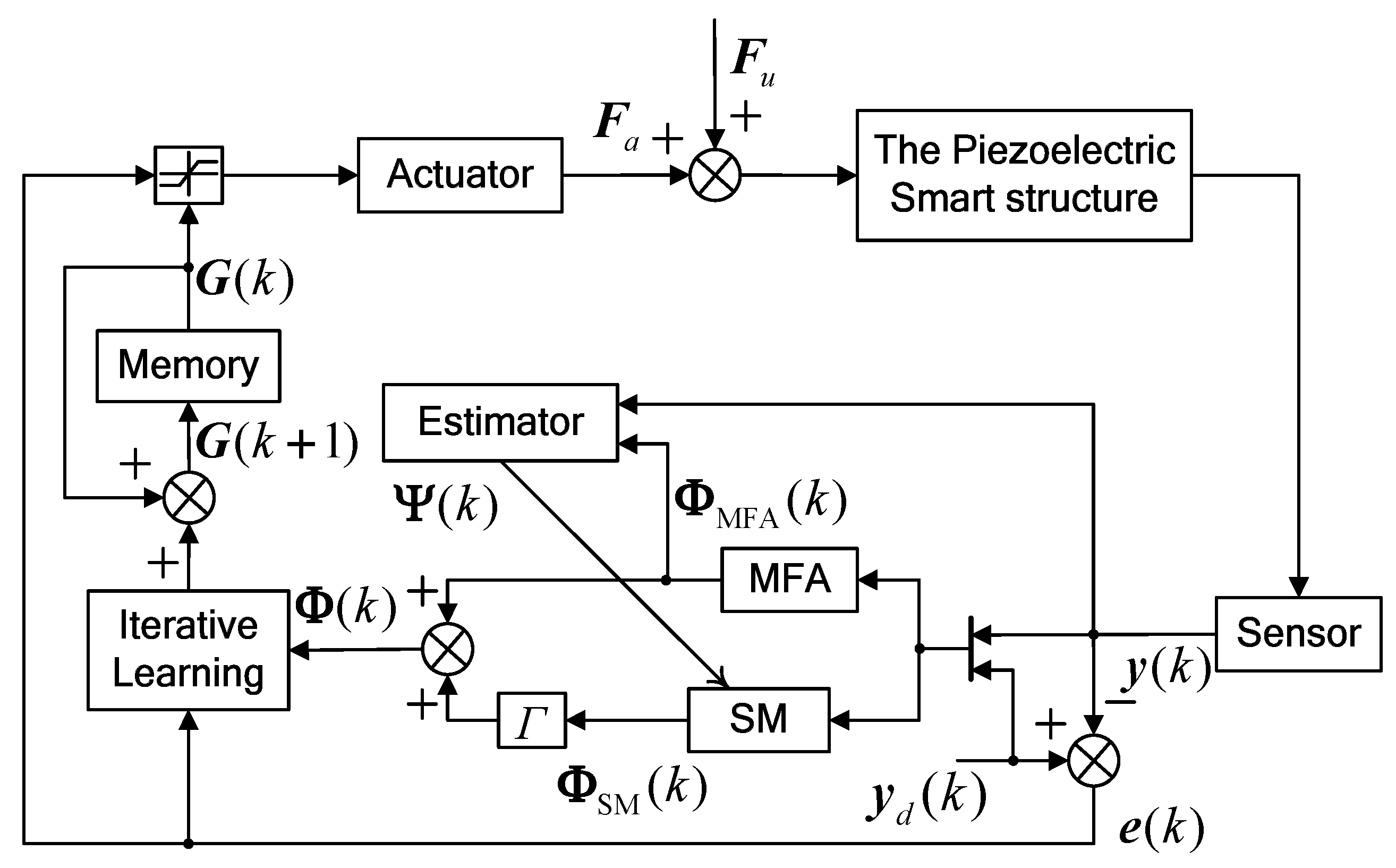
In this paper, in order to accelerate the convergence speed of the feedback gain, the learning gain of the P-type IL control is designed by the MFA control. The MFA control can realize adaptive control in parametric and structural manners. And it is also suitable for dealing with system uncertainties [
25]. This advantage allows MFA control to be successfully employed in various engineering fields, such as use in the sensing and control of piezoelectrically actuated systems [
26], blood pump control [
27], multivariable industrial processes control [
28], and robotic exoskeleton tracking control [
29]. However, the convergence speed of the tracking error may be slow if only MFA control is used to adaptively adjust to the learning gain of the P-type IL control, and external noise in the system will increase the difficulty of vibration control. Various control strategies have been provided and continuously developed for the control of plants with unknown uncertainties and dynamic variations, such as sliding mode (SM) control [
30], fuzzy logic control [
31], neural networks [
32], etc. For nonlinear, time-varying and uncertain systems, neural network approaches have an excellent approximation ability, and fuzzy logic control possesses remarkable robustness and adaptability, nevertheless, the tuning of numerous parameters and complex rules may decrease the efficiency and possibility of these methods [
33]. Unlike neural networks and fuzzy logic control, SM control has a simple controller structure and can is easily implemented. Moreover, it has other attractive features, including good transient performance, robustness to parameter variations and insensitivity to disturbances [
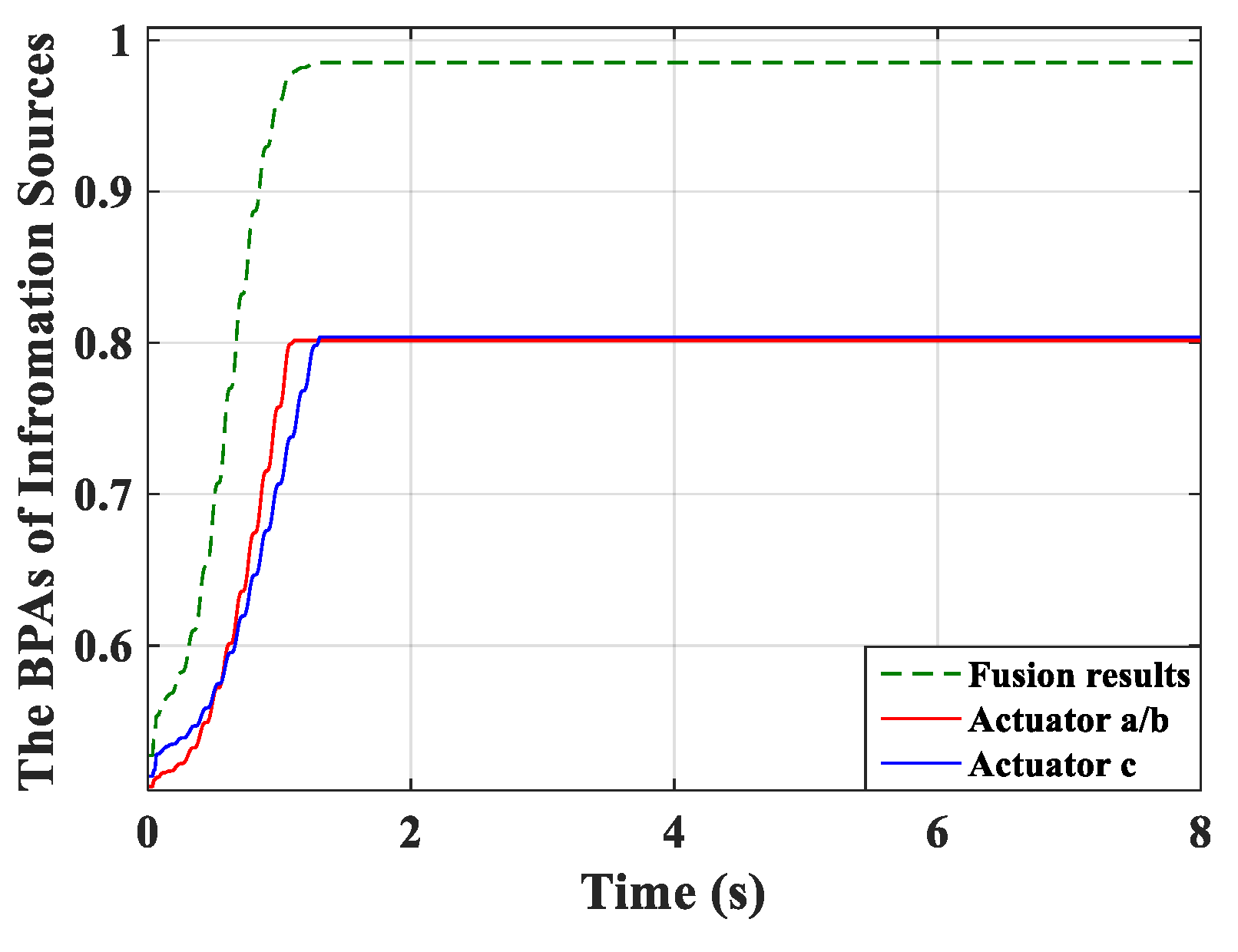
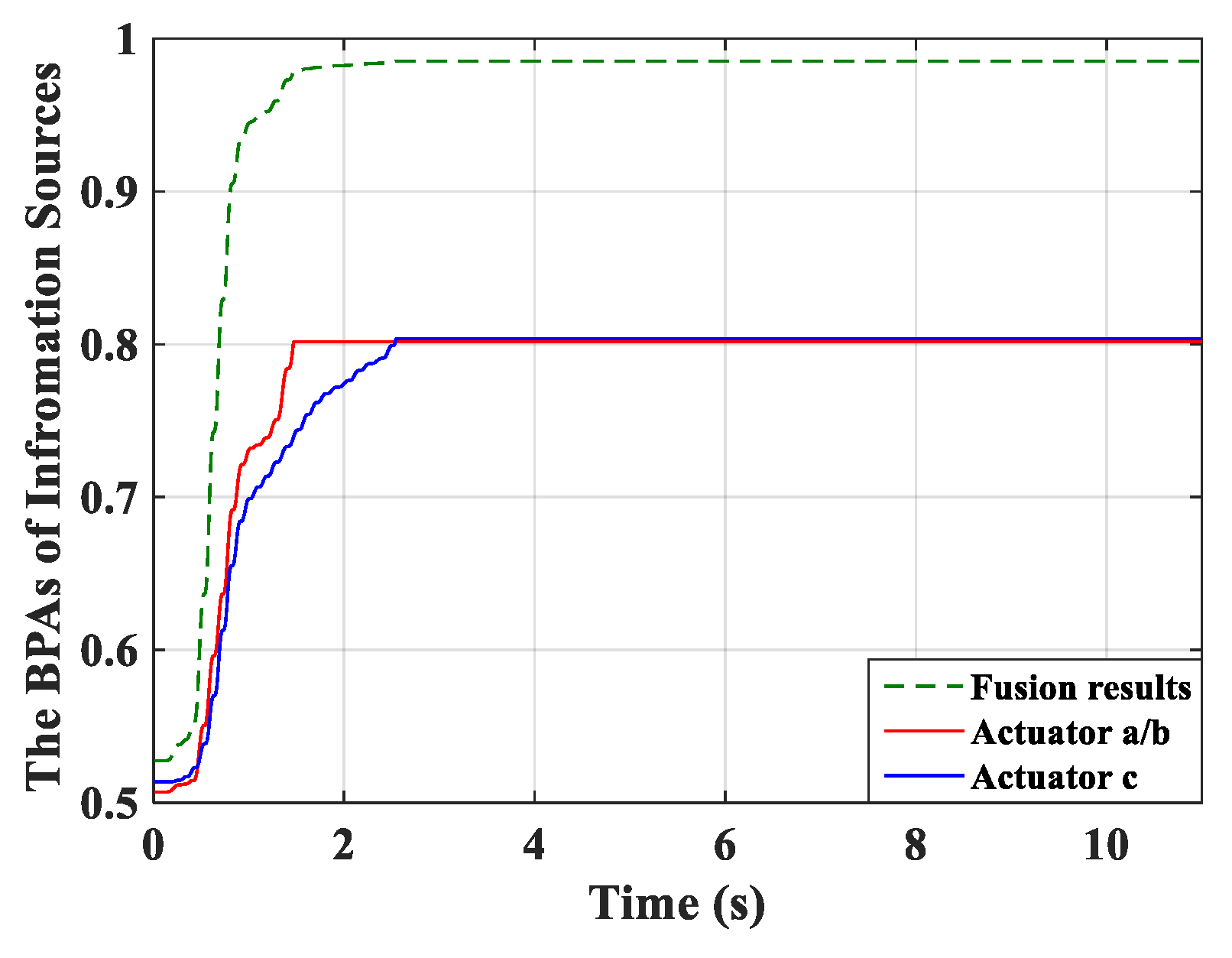
34]. With the aim of achieving a faster response and better robustness, the SM control was integrated with the MFA control to self-adjust the learning gain of the P-type control. Within the proposed method, the SM control is applied to estimate the parameters by tracking the time-varying PPD, such that the state variables can rapidly converge to the desired trajectory. Additionally, SM control can also be used to compensate for the impact of random disturbance, thereby enabling the system to enhance control effectiveness and maintain superior stability. In the P-type IL algorithm, two parts mainly affect the convergence speed of the feedback gain: The system output error and the learning gain. In the application of vibration suppression, the desired output signal is always zero. Therefore, the measured output signal is the main factor that decides the system output error. In this paper, multi-sensors are used to detect the structural deformation of a cantilever plate. Sensors at various locations generate different measured output signals, and the controllers connected to these sensors may have distinct learning speeds. It is unreasonable to define the same iterative number for all controllers as part of the stopping criteria. After obtaining multi-source information from the controlled plant, it is critical to discover the optimal method of fusing this information. In this paper, in order to solve the multicriteria and multiobjective problems in practical applications, evidence theory was adopted to design the stopping criteria. The evidence theory does not require prior knowledge and has outstanding performance for handling uncertain or inexact information, which makes it an indispensable tool for state diagnosis and defect inspection [
35,
36]. Applying the combination rules, the evidence theory can carry out reasoning, data fusion or decision making [
37]. By using information fusion technology, the learning processes of all controllers can be diagnosed in real-time by the real-time feedback gains obtained from the controllers. On this basis, the stopping criteria were designed for overlearning diagnosis of the robust MFA-IL algorithm.
The finite element (FE) method is a widely accepted and powerful tool to deal with piezoelectric smart structures. Some kinds of efficient and accurate electromechanically coupled dynamic FEs of smart structures have already been developed [
38,
39,
40]. Among commercial FE analysis codes, ANSYS has the ability to model smart structures with piezoelectric materials, and H Karagülle et al. [
41] successfully integrated vibration control actions into ANSYS modeling, where the solution was achieved as well. In this paper, ANSYS parametric design language (APDL) is used to integrate the control law into the ANSYS FE model to perform closed-loop simulations.
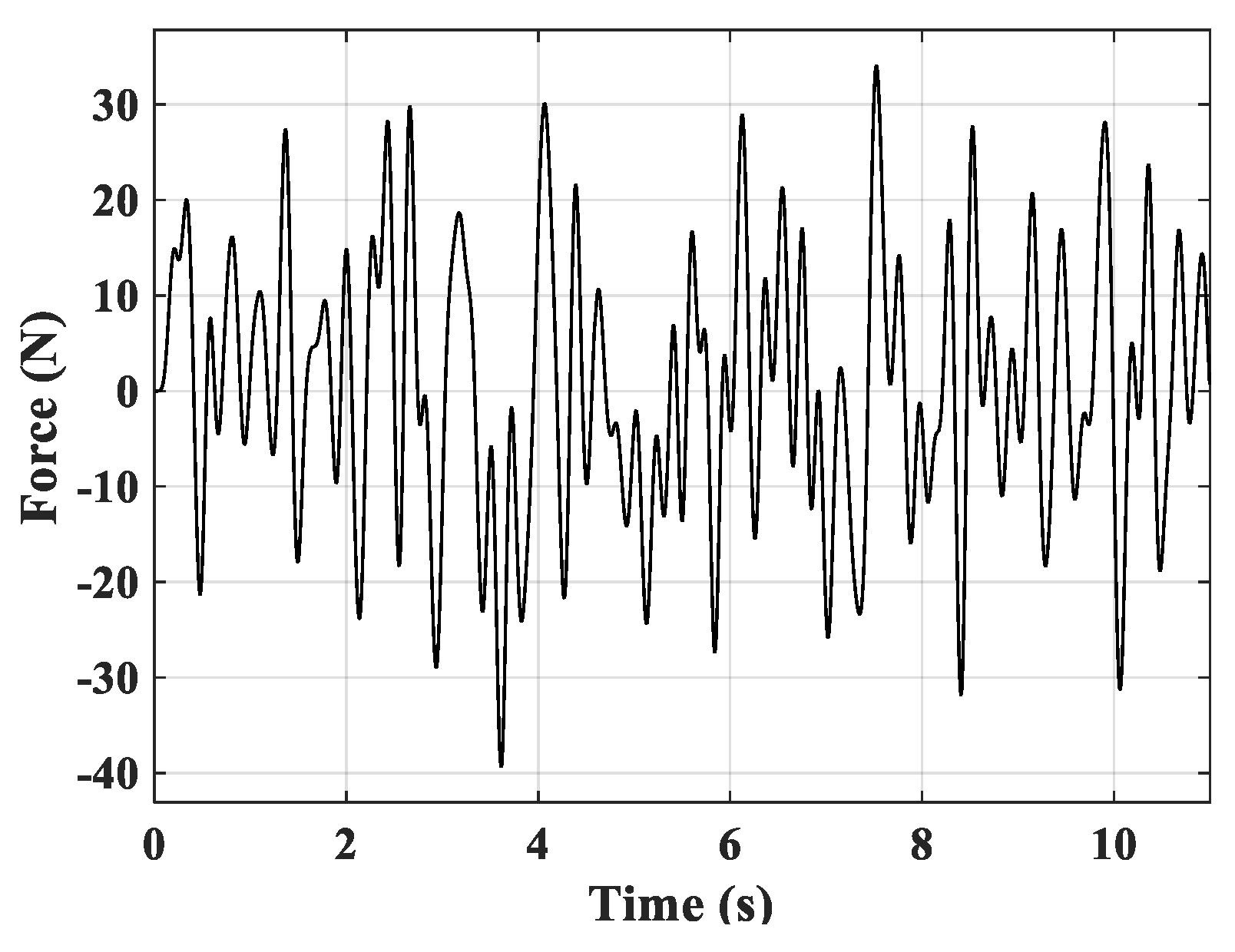
In this paper, using the complementary features of P-type IL control, MFA control and SM control, a robust MFA-IL control strategy was developed for the suppression of vibrations in smart structures. Due to its ability to cope with uncertainties in the learning control process, MFA control was applied to adaptively adjust the learning gain of the P-type IL control. By inserting the SM control term into the MFA control, the learning gain can be designed properly and the convergence rate of the tracking error and the robustness of the closed-loop system can be improved. A multi-source information fusion diagnosis method for the overlearning evaluation is presented based on the evidence theory, and the stopping criteria are also be designed. The proposed control method was numerically and experimentally investigated for a clamped plate under various external disturbances, and the results are illustrated and extensively discussed at the end of the present work.
The rest of this paper is organized as follows. In
Section 2, based on the FE model of piezoelectric smart structures, the state space model of the equivalent linear system is developed for the purpose of control law design. The P-type IL control is employed for establishing the vibration control equations.
Section 3 describes the dynamic transformation and linearization for the vibration control system.
Section 4 describes the design of the robust MFA-IL control scheme. Theoretical basis of state diagnosis, based on evidence theory and the design of the stopping criteria, is introduced in
Section 5. In
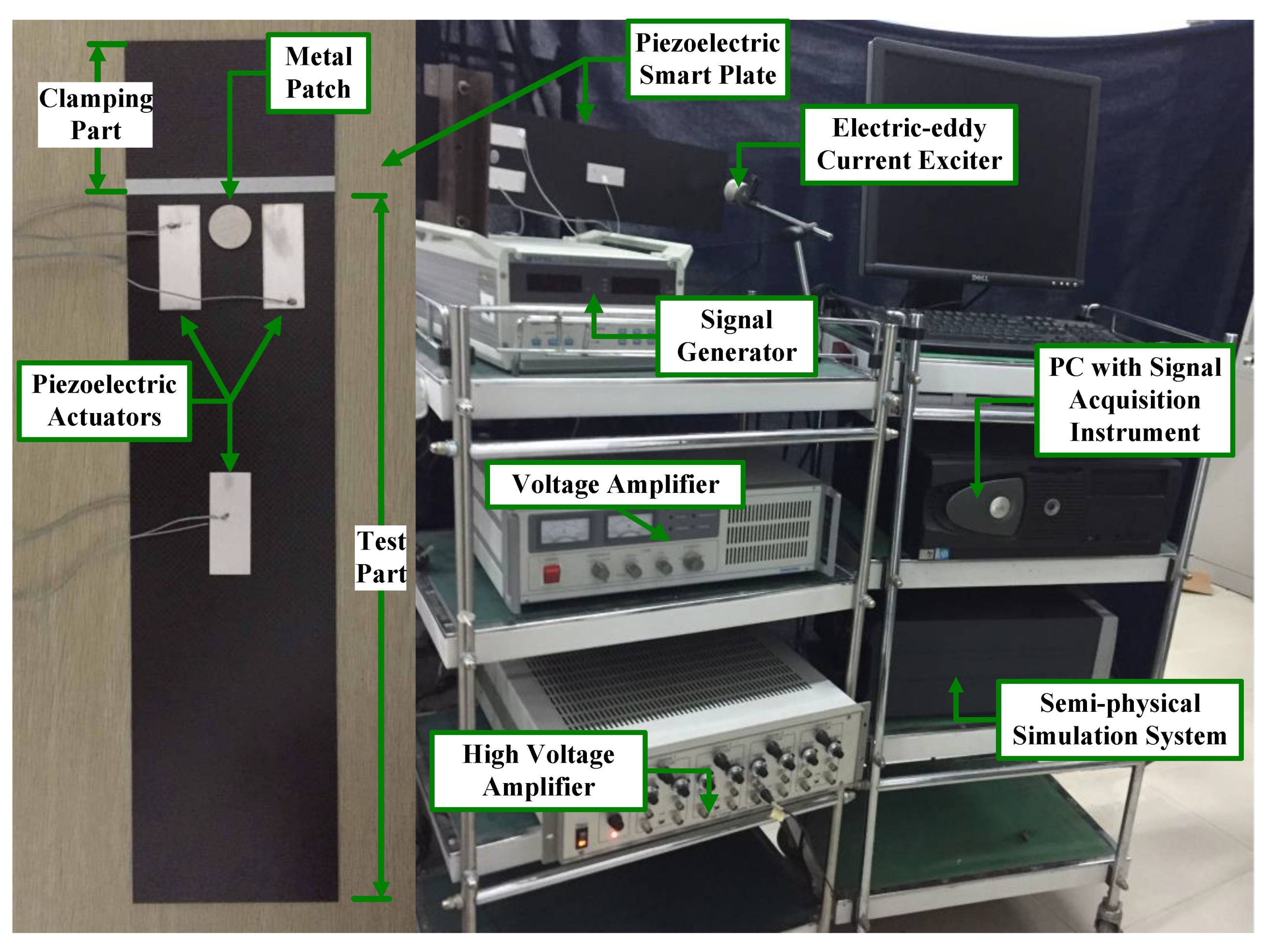
Section 6, numerical examples are presented to demonstrate the validity of the proposed method. In
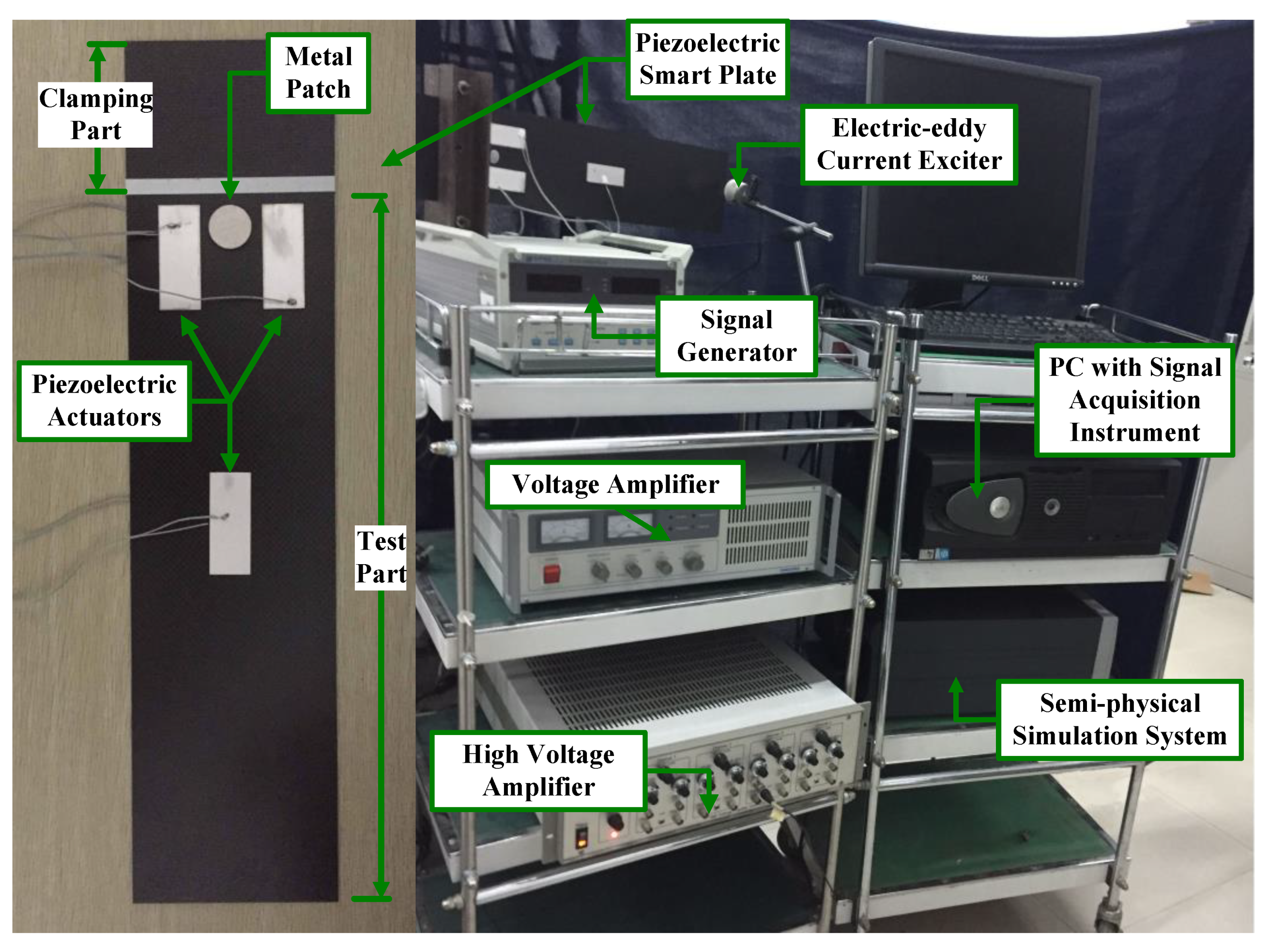
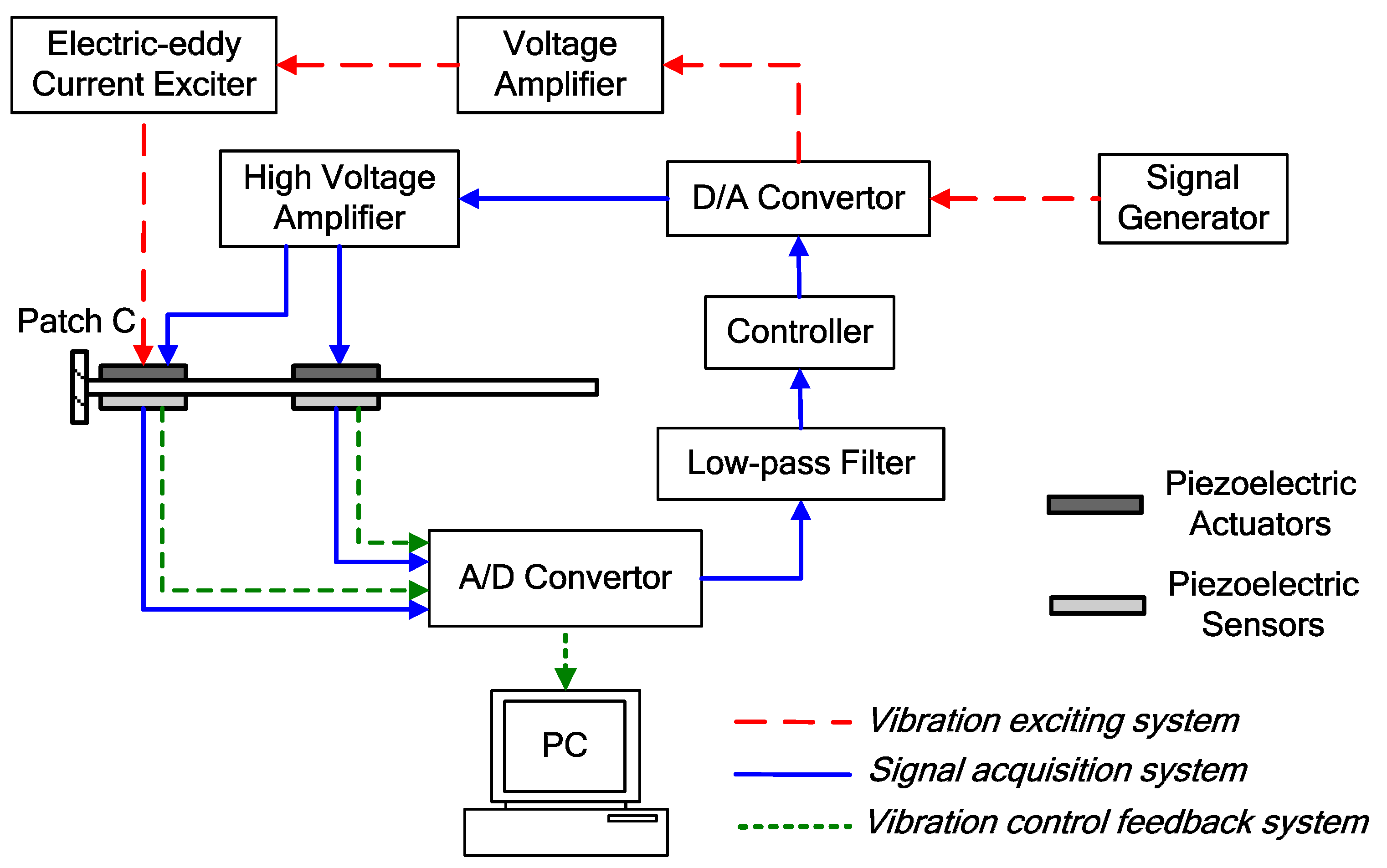
Section 7, a complete active vibration control system is set up to conduct an experimental investigation. The conclusions and outlooks are drawn in
Section 8.
2. FE Model and P-type IL Control
The linear electro-mechanically coupled dynamic FE equations of the piezoelectric smart structure can be written as [
23]:
where
and
are the vectors of nodal displacements and electric potentials;
,
,
,
(
) and
are the structural mass matrix, the damping matrix, the mechanical stiffness matrix, the piezoelectric coupling matrix and the dielectric stiffness matrix, respectively;
and
are the vectors of mechanical force and electric load, respectively.
The damping matrix
is usually defined as a linear combination of the structural mass matrix
and the mechanical stiffness matrix
, which is written as follows:
where the constants
and
are the Rayleigh damping coefficients.
The piezoelectric sensor generates output electric potential as long as the structure is oscillating. The system (1) can be uncoupled into the following independent equations for the sensor output electric potential:
and the structural displacement
where
.
Note that
is usually zero in the sensor, thus, Equation (3) can be rewritten as
. Then, the rate of change of the sensor output electric potential can be written as:
The system output error is defined as:
where
is the desired output signal and
is measured output signal.
In the application of vibration suppression, we require the desired output signal to be zero. The measured output signal in this paper is the rate of change of the sensor output electric potential, namely,
. As a discrete-time system, the output error at the
moment can be given as:
According to the update rule of the P-type IL control [
42], the feedback gain at the
moment can be given as:
where
and
are the learning gain matrix and feedback gain matrix, respectively.
The feedback gain
is stored in memory at the
moment and applied for the next iteration when the system operates. The input voltage of the actuator is expressed as:
The electric load vector is defined as:
where
is the capacitance constant of the piezoelectric actuator.
The control force can be defined as
and by combining with Equations (5), (9) and (10),
can be rewritten as:
The control force generated by actuator is used to suppress structural vibration. Substituting Equations (5), (9) and (10) into Equation (4), the vibration control equation of the piezoelectric smart structure can be expressed as:
8. Conclusions and Outlooks
A robust MFA-IL control method was developed for the active vibration control of piezoelectric smart structures. Considering the uncertainty of interaction among all actuators in the control process, the MFA control was incorporated into P-type IL control for the adjustment of learning gain. In order to achieve a fast control response and enhance the stability of the system, SM control was adopted to ensure a fast dynamic response and compensate for the influence of uncertain noise. The multi-source information fusion method based on the evidence theory was adopted to design the stopping criteria of the robust MFA-IL method. The vibration control equations of piezoelectric smart structures were derived from the dynamic FE equations of a linear elastic system. The dynamic linear method was applied to transfer the vibration control equations for the design of the robust MFA-IL controller. The simulation and experimental results were presented and compared with the corresponding results using the P-type IL control approach.
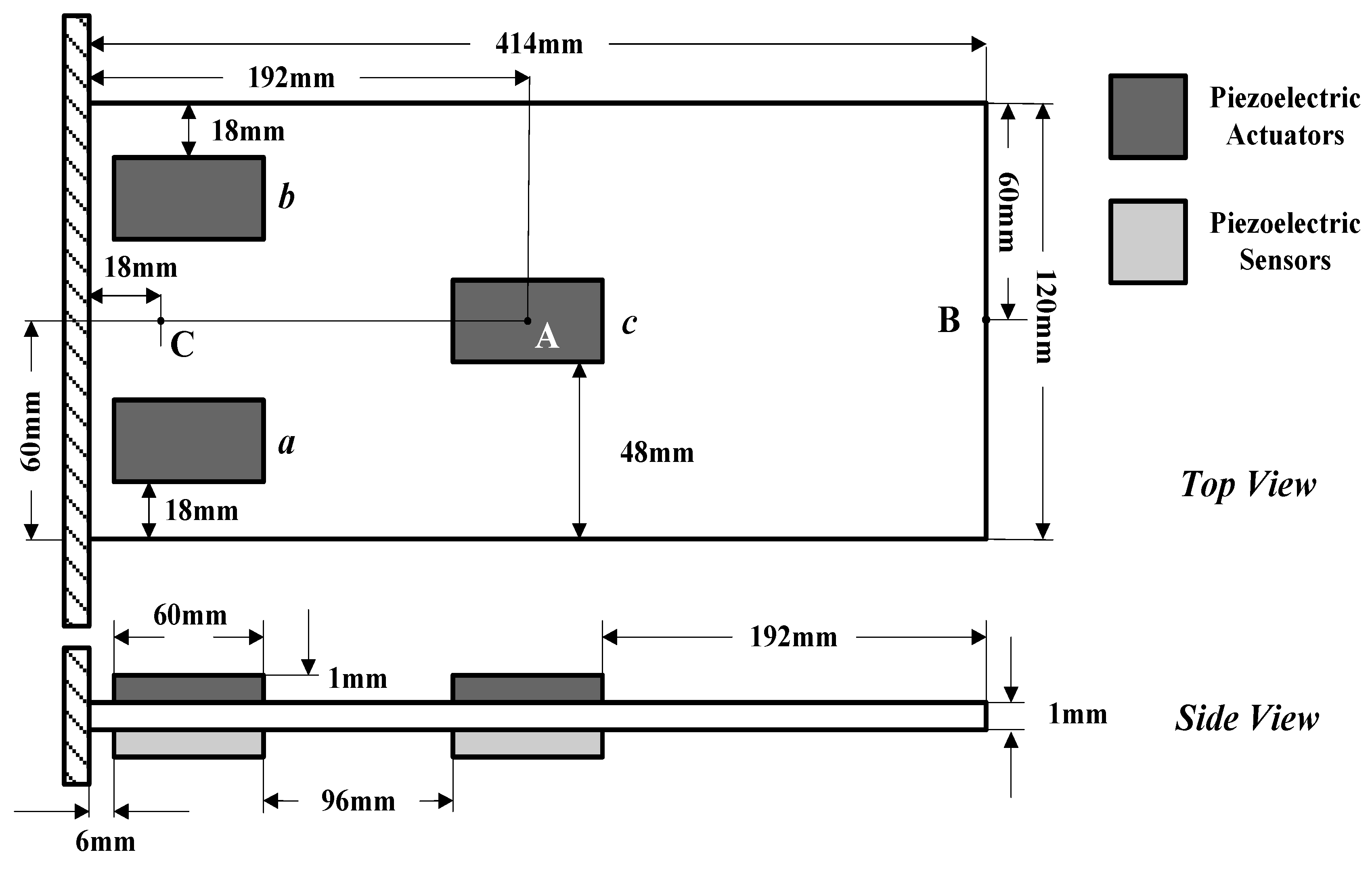
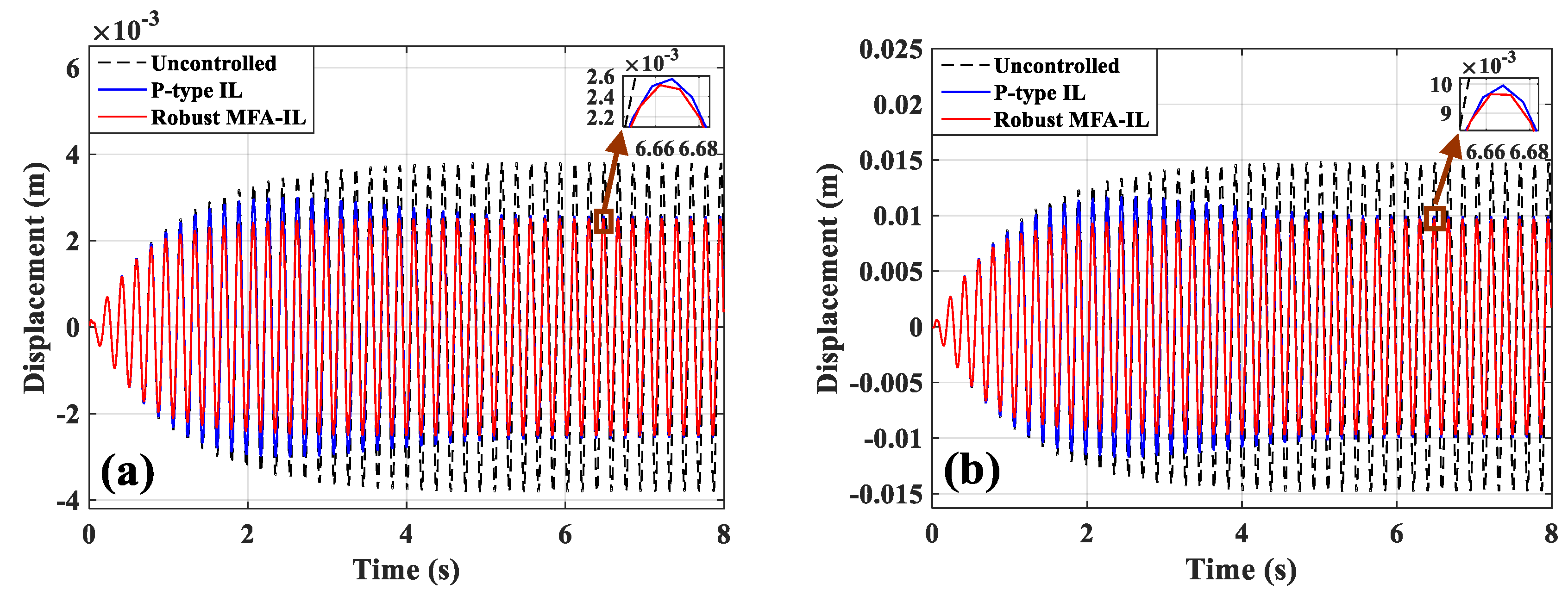
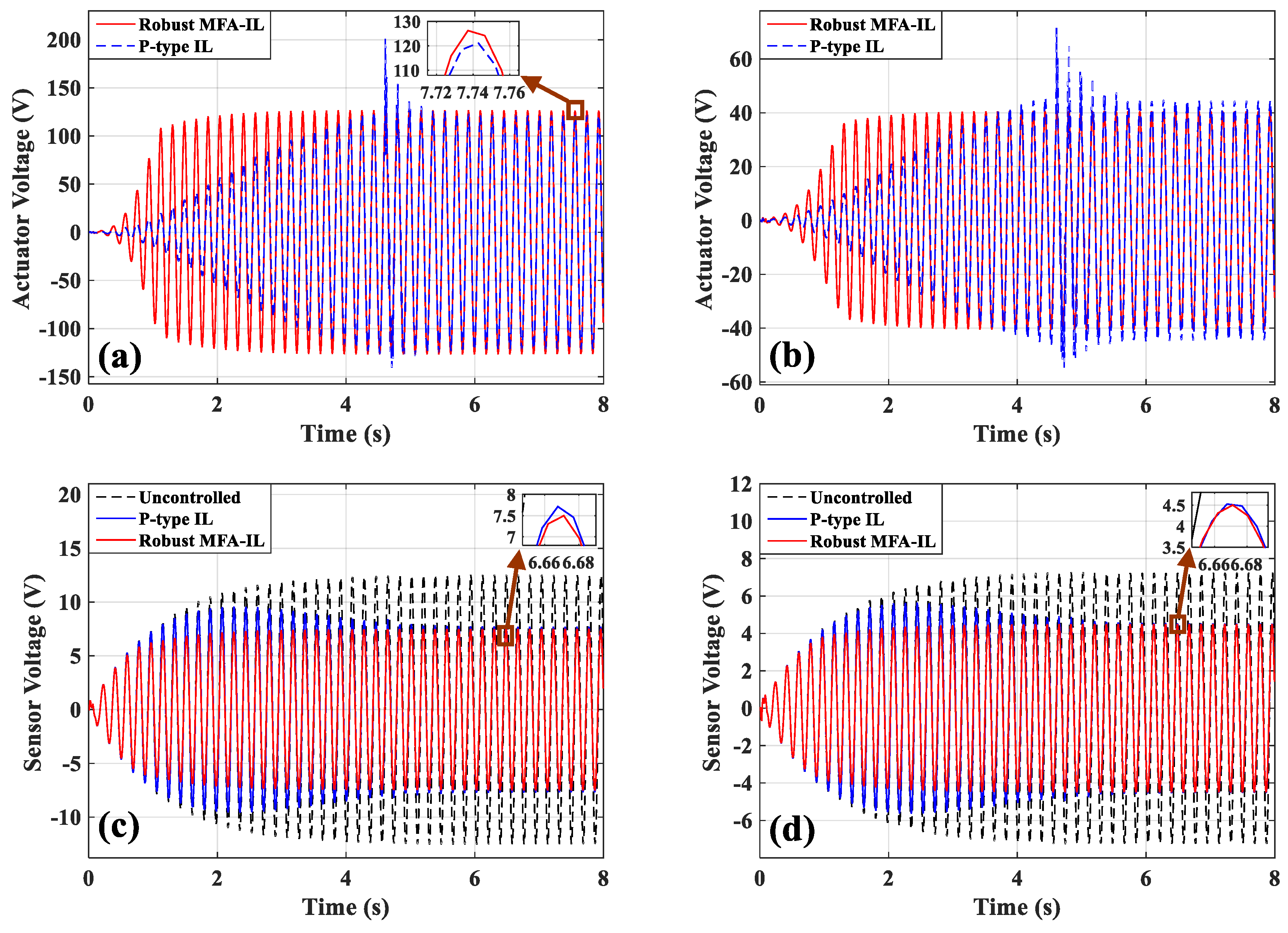
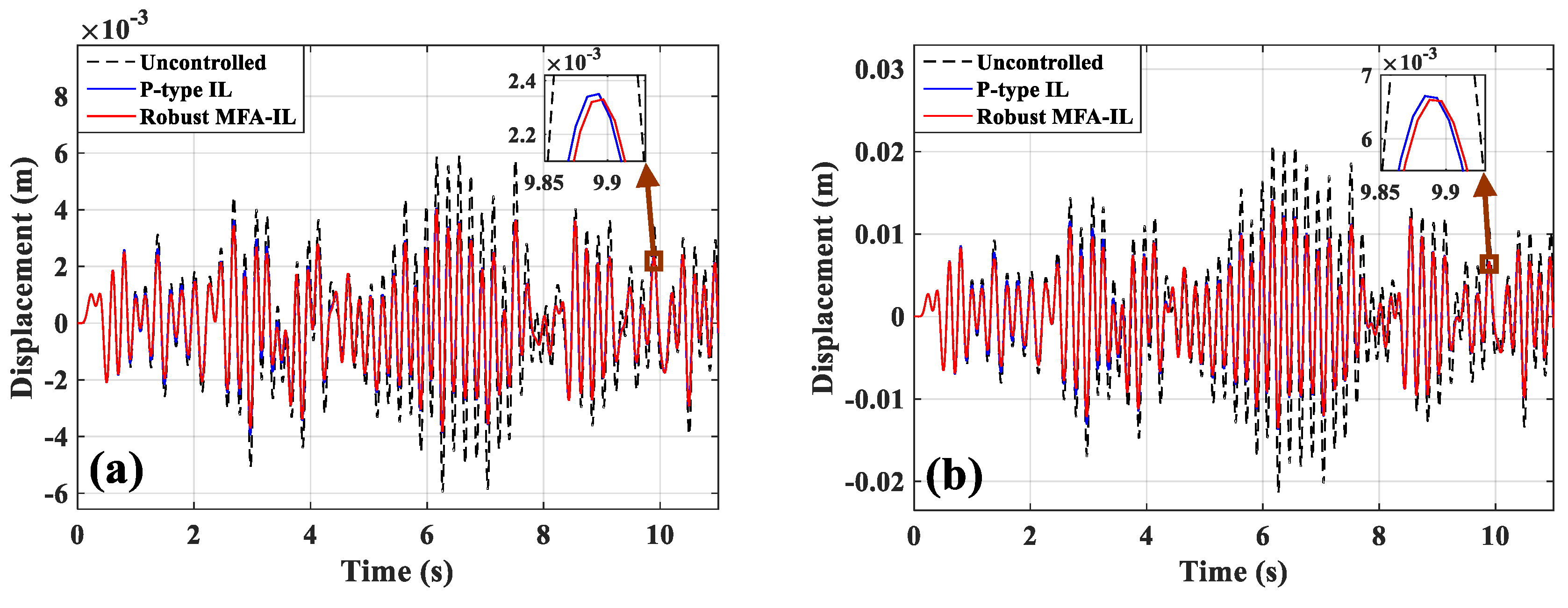
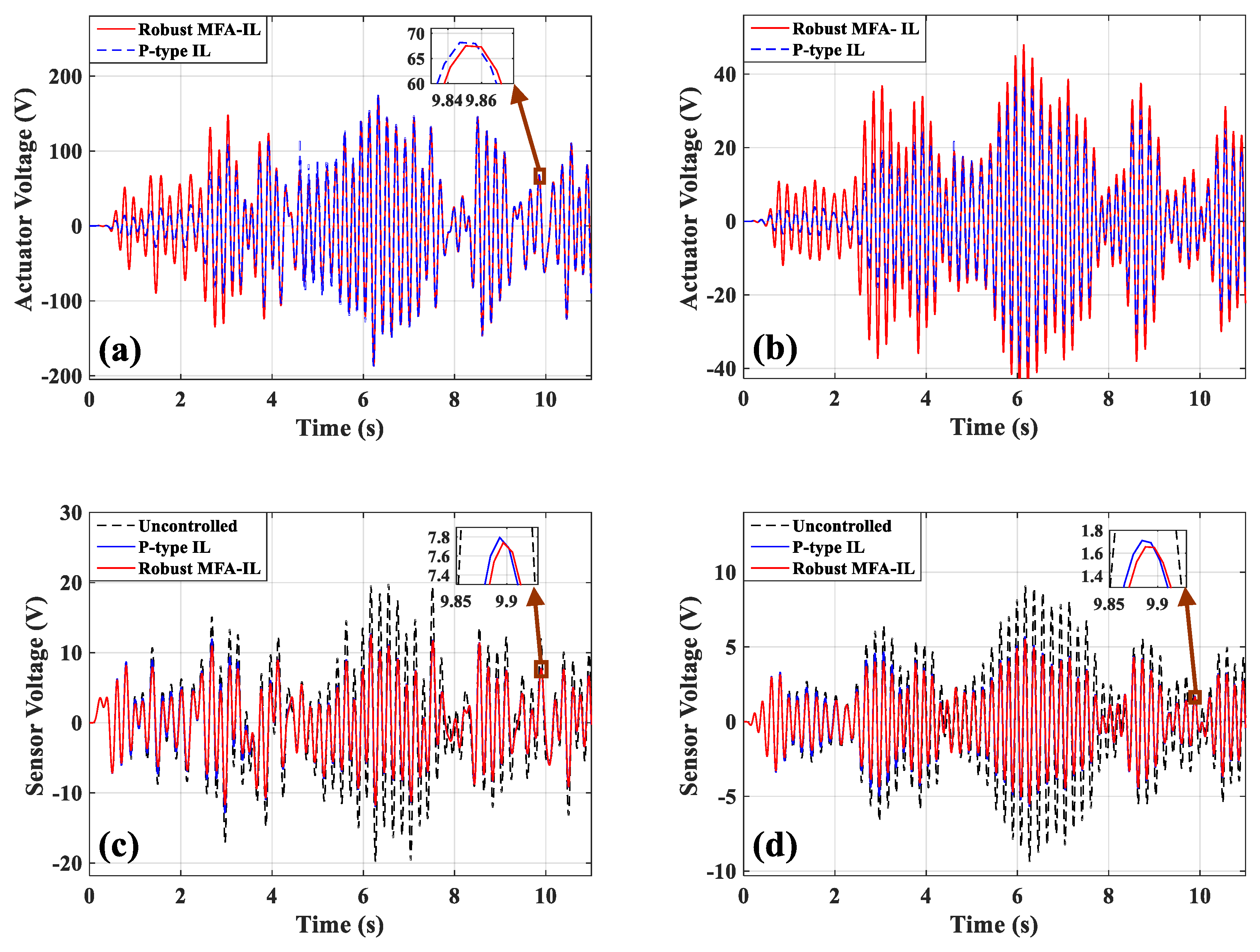
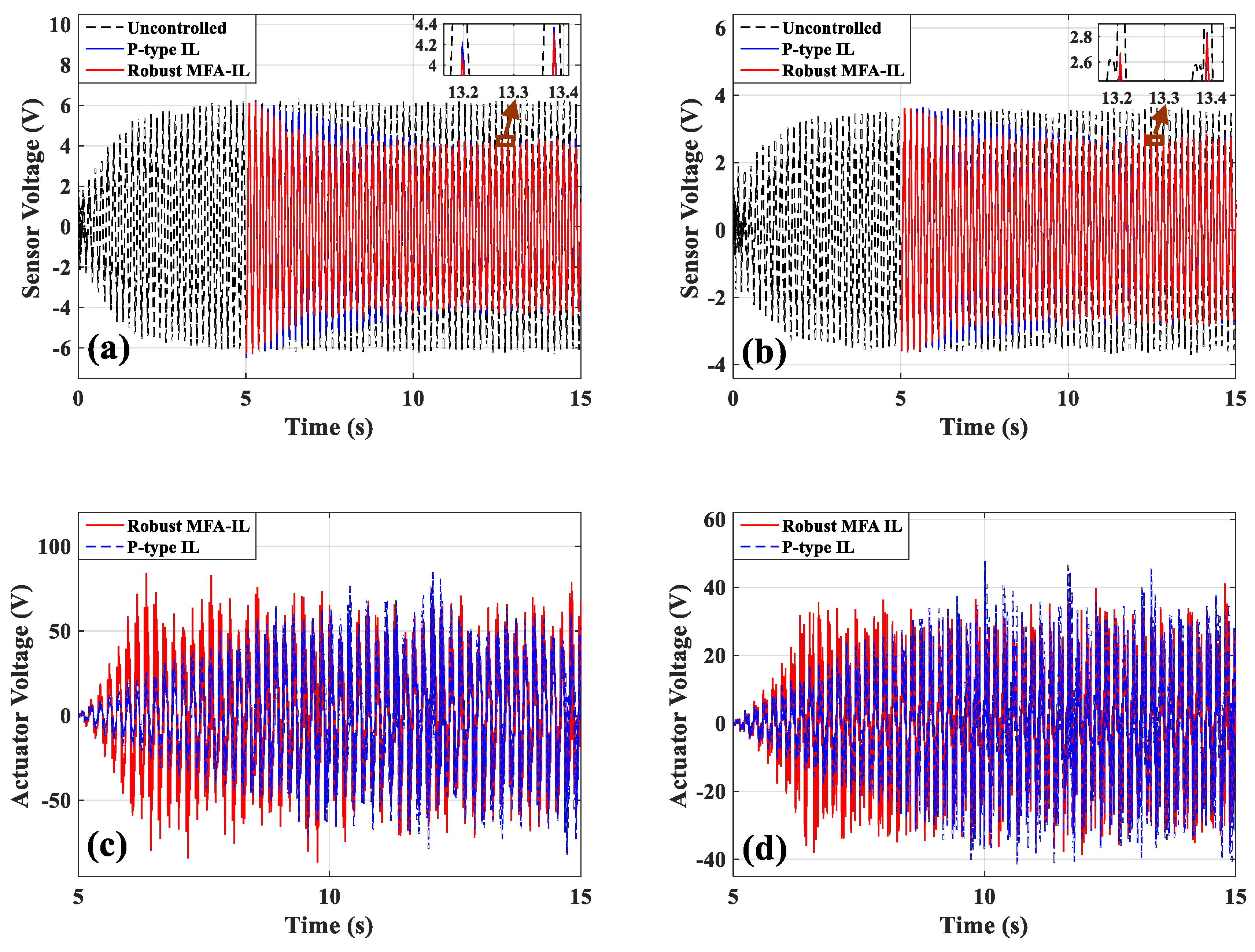
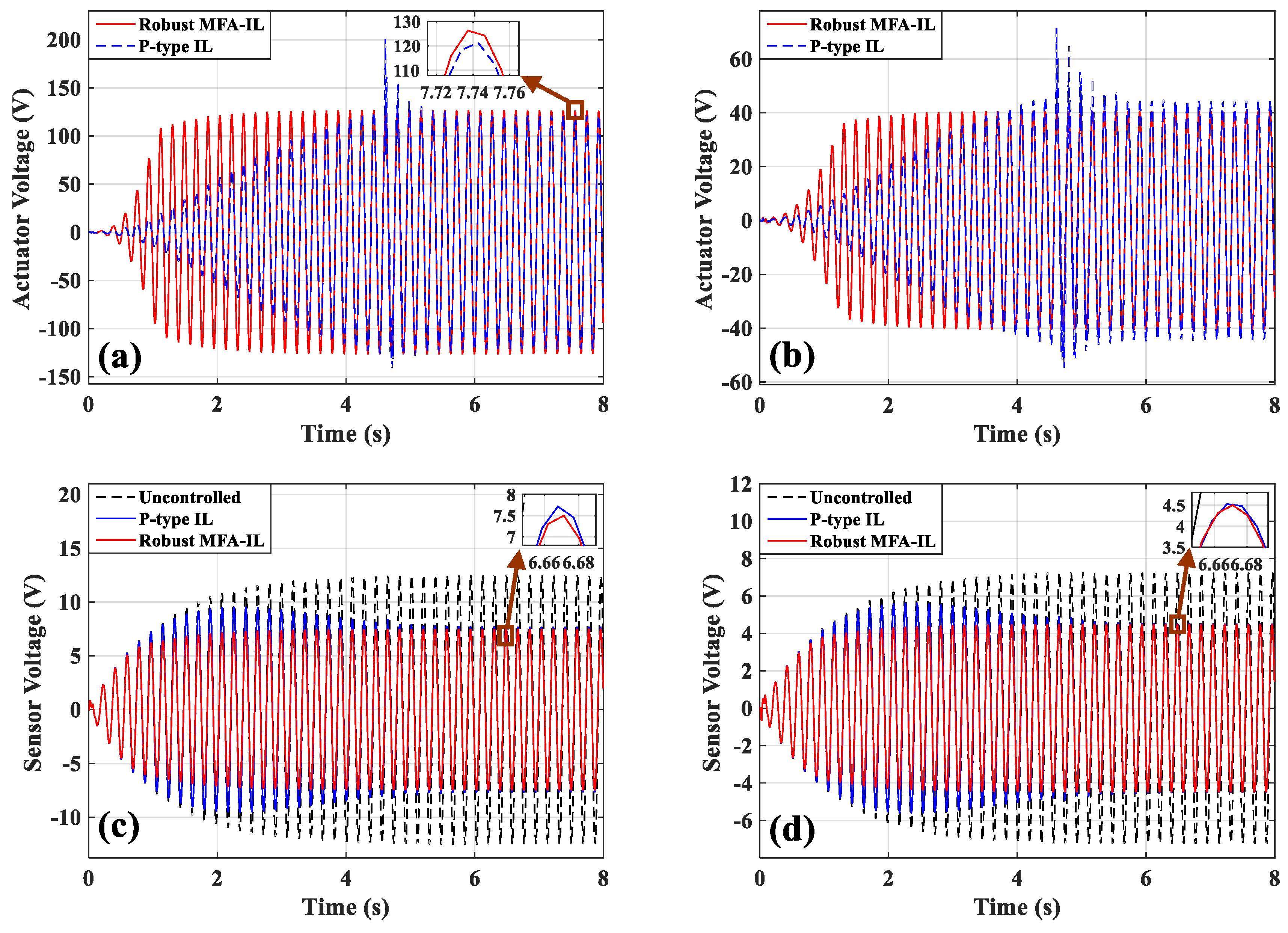
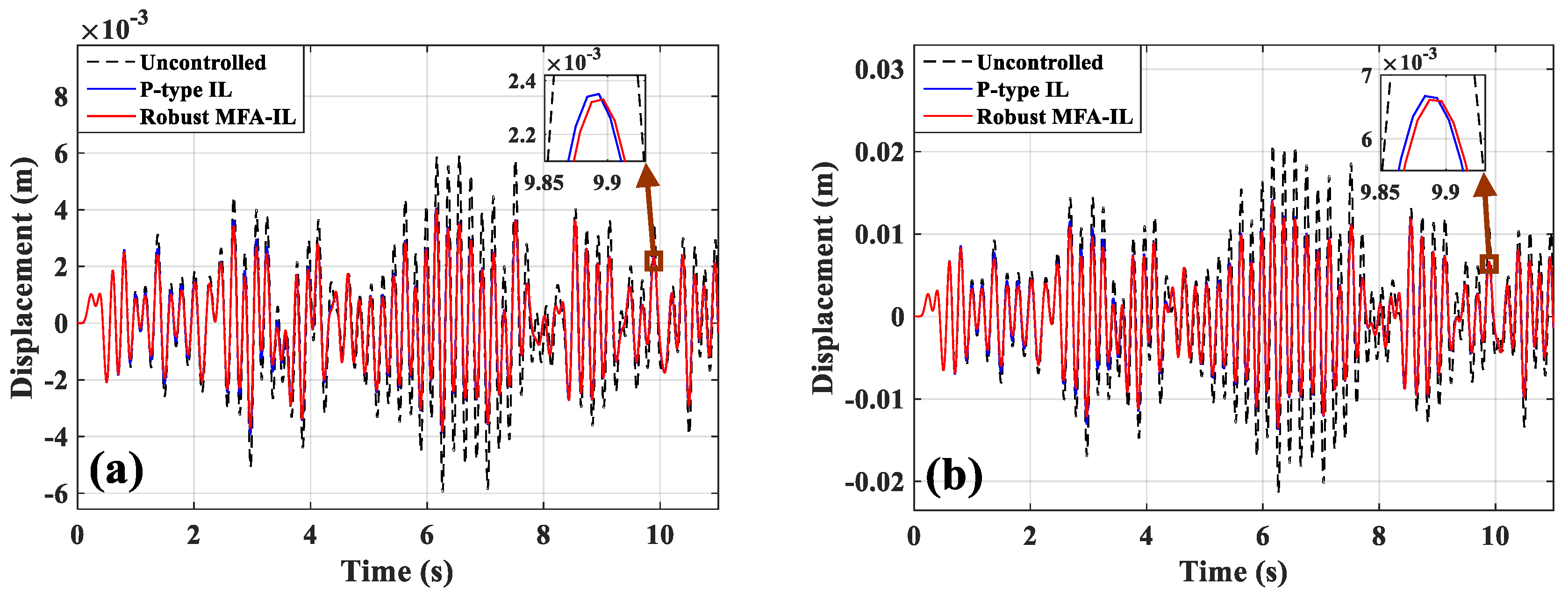
As long as the locations and sizes of actuators and sensors are chosen appropriately, both P-type IL control and robust MFA-IL control can effectively suppress structural vibration when the piezoelectric smart plate is excited by its first natural frequency. Furthermore, the whole structure presents good controllability, rather than small portions bonded with piezoelectric sensors, using both the P-type IL method and the robust MFA-IL method.
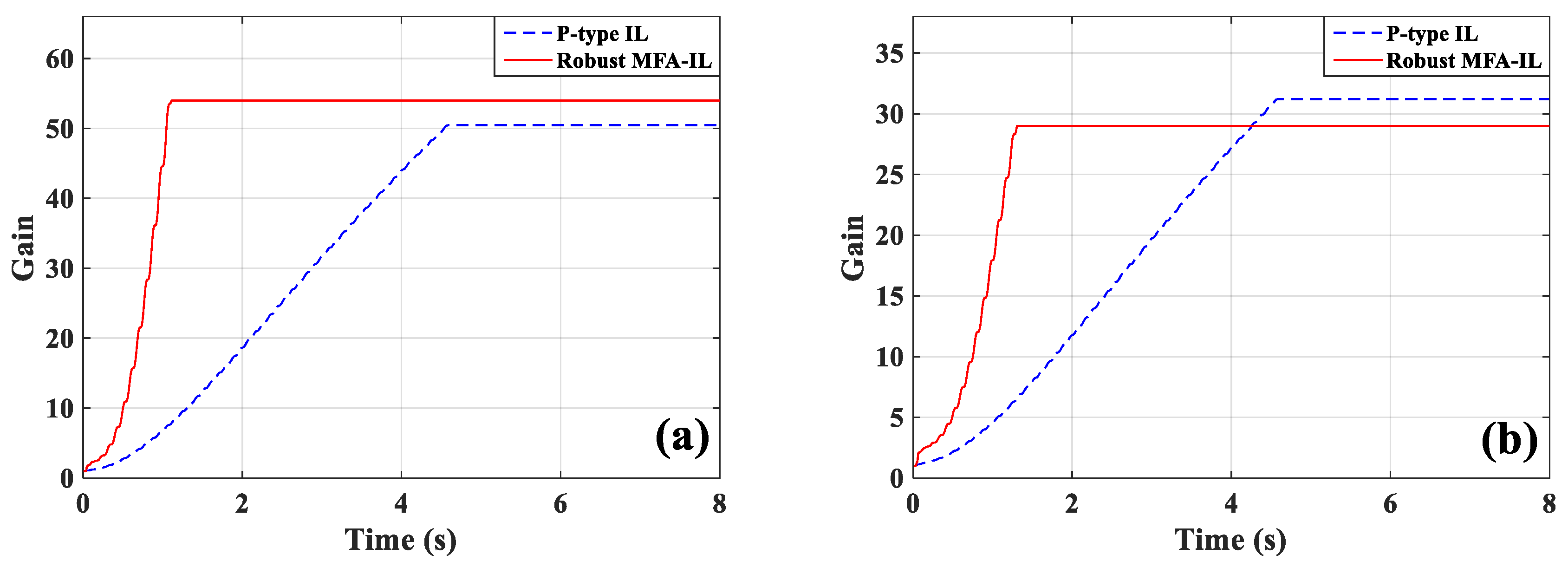
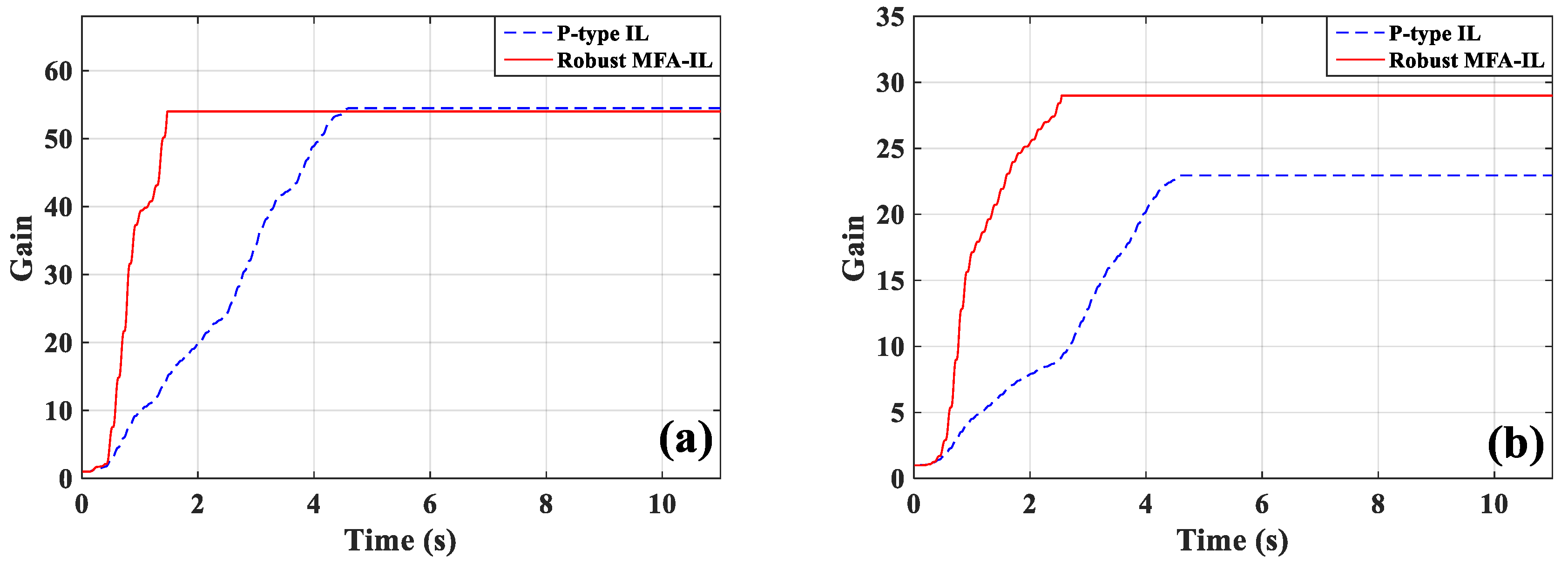
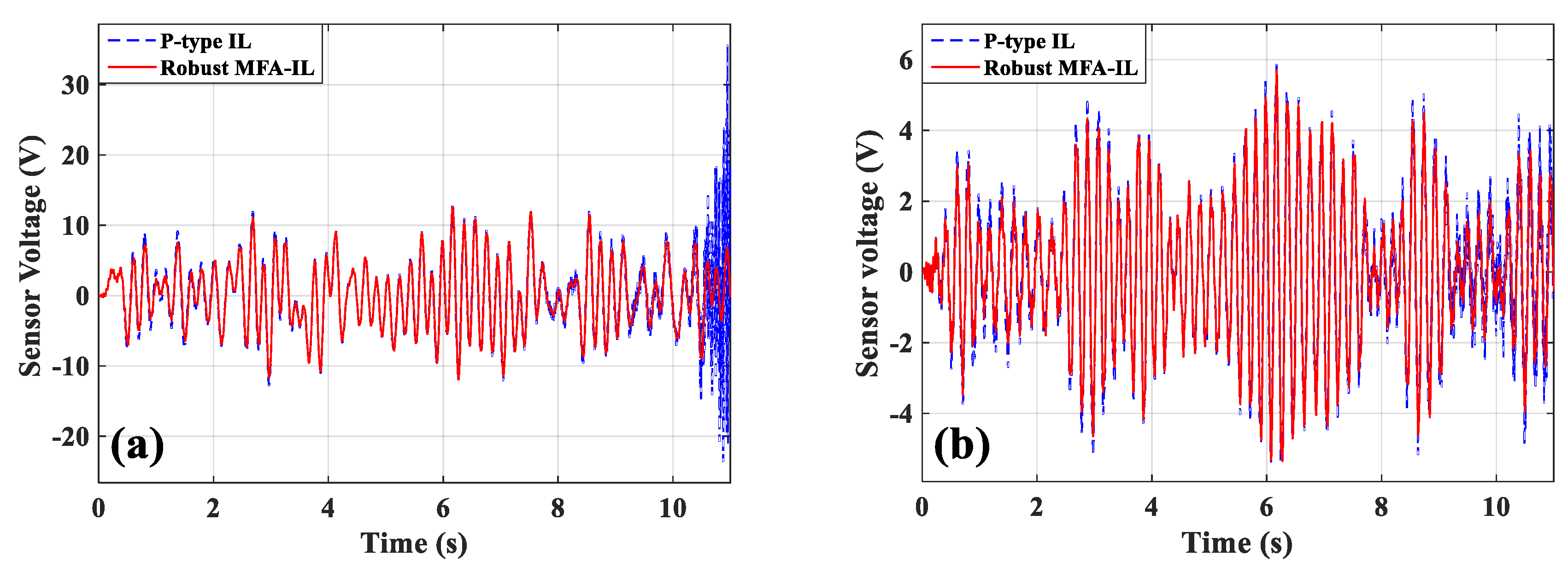
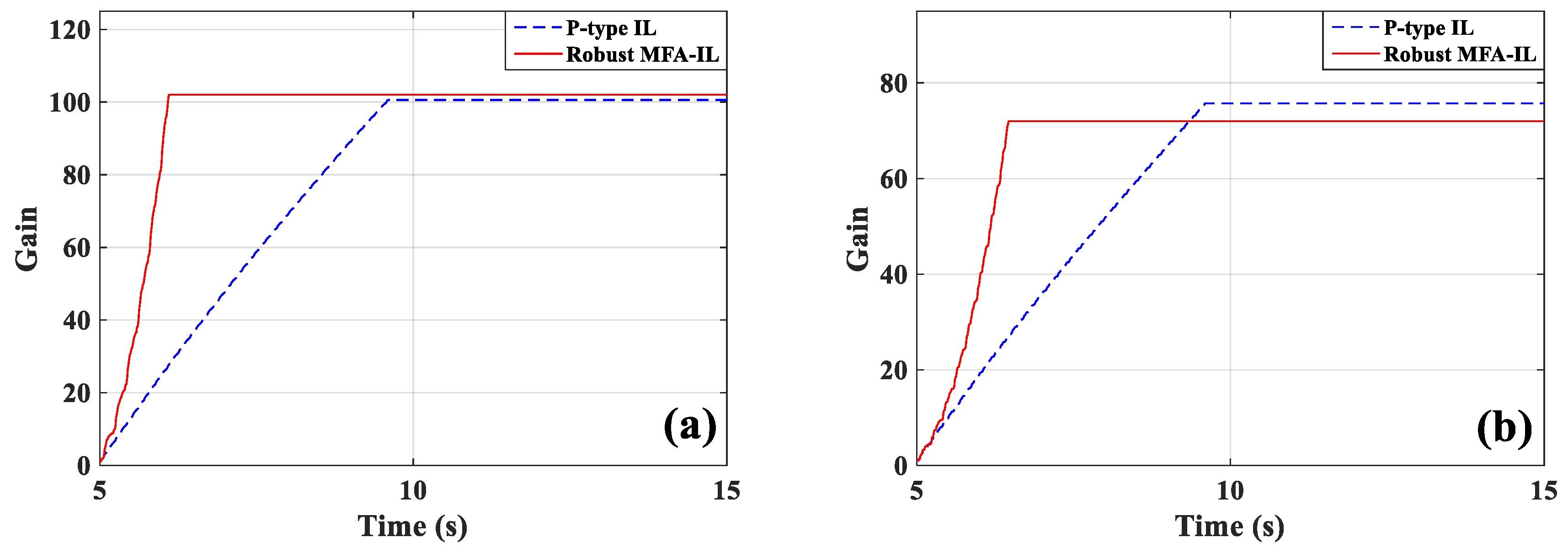
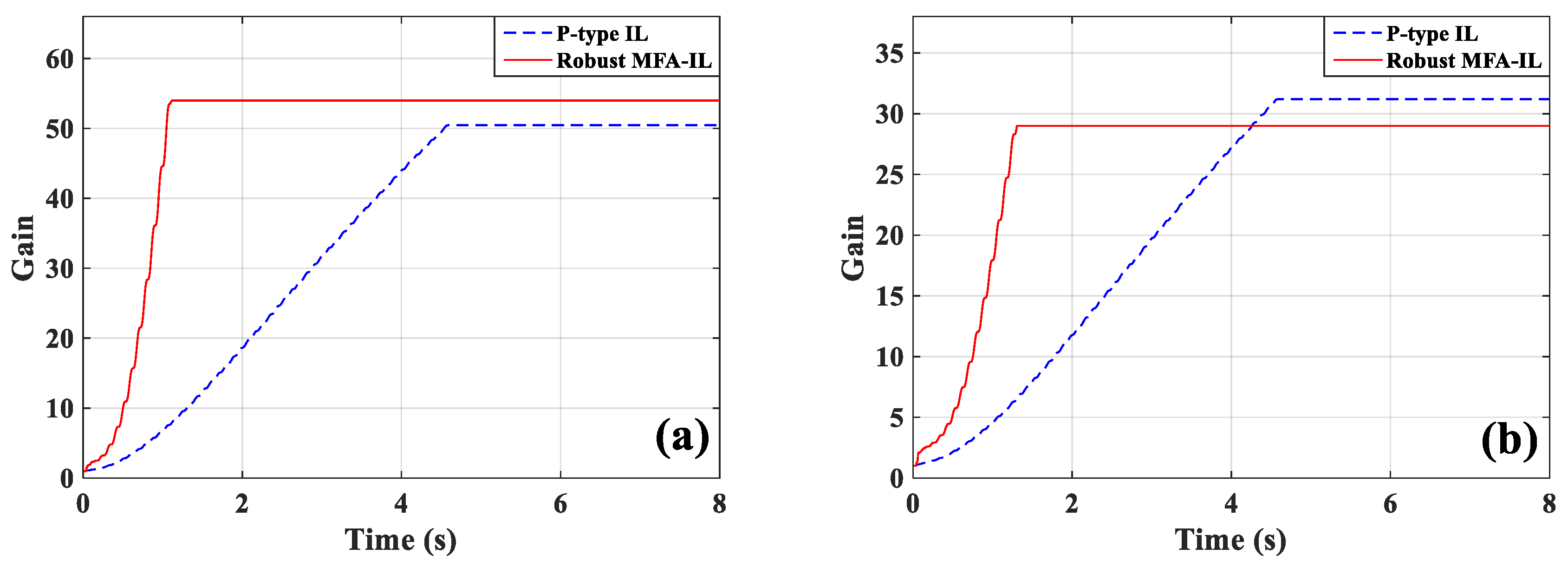
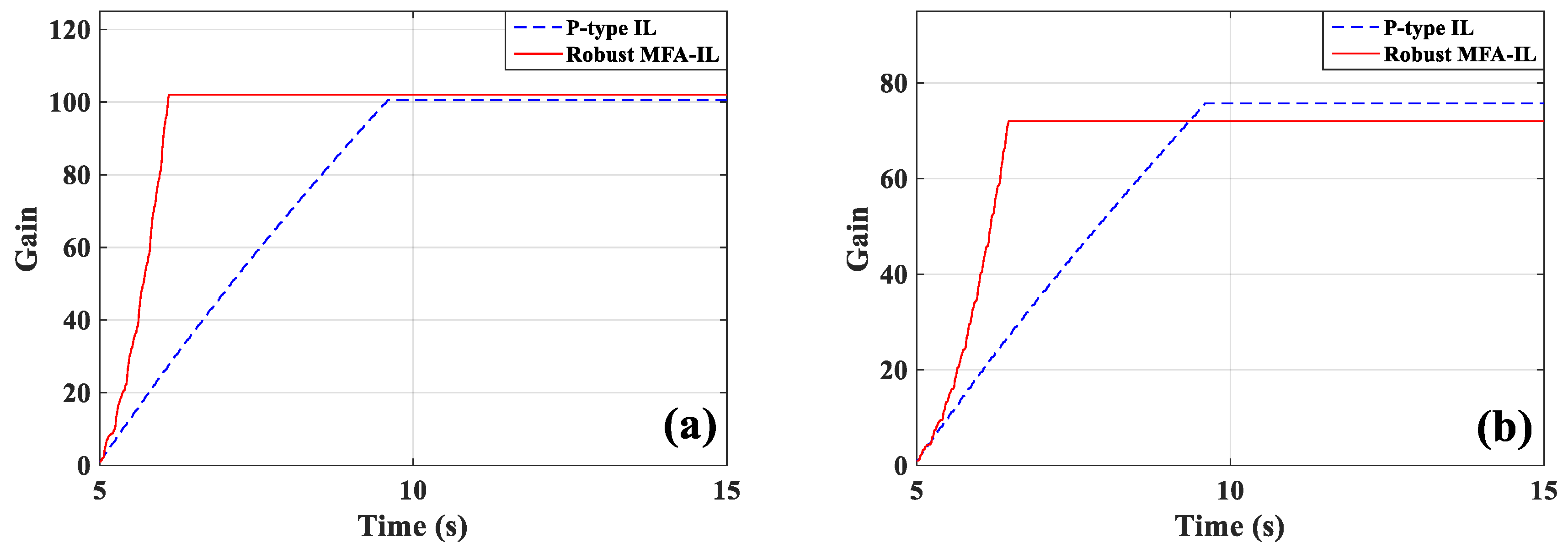
The robust MFA-IL control method accelerates the learning speed of the controller. Based on the comprehensive comparative analysis of the numerical and experimental results, the proposed control method can achieve better control performance and is more robust to external disturbances when compared with the P-type IL control. In other words, the proposed control method overcomes the inherent drawbacks of P-type IL control and achieves the desired control performance.
Although the robust MFA-IL control method was applied for a plate structure in this paper, considering its advantages presented above, this approach can be applied for other structures, like beam structures, extending the possibilities of engineering and research applications. Dynamic linearization was an effective method in developing the proposed method for nonlinear systems. Dynamic linearization mainly introduces optimal technology as a tool for the controller design and analysis. In future work, it will be expected that the dynamic linearization method will be combined with an online model identification technique to deal with much more practical problems, those typically encountered in industrial applications. This may result in a simpler controller structure and obtain a better degree of control precision.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}