1. Introduction
Inductors play an important role in radio frequency integrated circuits (RFICs) [
1,
2,
3]. Compared with traditional complementary metal oxide semiconductor (CMOS) on-chip inductors, micro-electromechanical systems (MEMS) suspended planar spiral inductors have excellent radio-frequency because the inductor coils are lifted several micrometers above the substrate [
4,
5,
6,
7]. MEMS suspended inductors have benefits in improving the performance of RFICs. However, MEMS suspended inductors have poor mechanical properties and they tend to fail under mechanical shock during fabrication, shipping, and operation. In particular, in some extreme application conditions, MEMS devices tend to withstand high mechanical shocks of amplitudes in the order of 10
4–10
5 g [
8]. A suspended structure inductor coil of the MEMS suspended inductor, for example, is susceptible to deform or even damage under high mechanical shock. When the MEMS suspended inductors are shocked and plastic deformation occurs, the radio frequency (RF) performance of the inductors will vary which may affect the operation of the circuits. So, it is important to study the influence of shock on the performance of the MEMS suspended inductors.
Many studies have been carried out to model the MEMS planar spiral inductor on silicon substrate with a lumped-element equivalent circuit [
9,
10,
11], among which the π model presented by Yue et al. [
12,
13,
14] is the most widely used one. Many researchers used the π model to design, optimize, and study MEMS planar spiral inductors. Lee et al. analyzed the effects of the substrate characteristic, metal line width, and suspension height on the suspended inductor performance with the π model [
15]. Palan et al. designed and characterized a levitated suspended RF inductor with the π model [
16]. Lu et al. designed and optimized a MEMS suspended inductor which was compatibility with the CMOS process with the π model and the inductors they fabricated had a high Q factor [
17]. The π model characterizes the planar spiral inductors on silicon with a lumped-element equivalent circuit. The method of calculating each element in the π model by geometric parameters and material parameters is presented in Yue’s work. There are also some researchers who studied to improve the π model. Cao et al. developed a 2-π model for on-chip spiral inductors [
18]. An equivalent 2-π ladder circuit were employed to model the series resistance and inductance, the proximity effect and the skin effect of the conductor were considered. The 2-π model can provide an accurate performance prediction and an excellent scalability for spiral inductor design. To obtain the model parameters of an existing MEMS inductor, Huang et al. proposed an approach to extract the values of each element of the π model by using the Y parameters of the inductors obtained by experimental tests [
19,
20]. The performance of the inductors and the factors affecting the loss can be analyzed with this method.
In this investigation, the performance variation mechanism of MEMS suspended inductors under mechanical shock is analyzed by combining theoretical analysis and experiments. First, a theoretical analysis is performed based on the π model. Then for the purpose of verification of the theoretical analysis, shock experiments with a Machete hammer are carried out. The values of each π model elements of the inductors shocked by different amplitude shock pulses are extracted. Finally, the experiment results are presented. As the mechanical response analysis and shock test of MEMS suspended inductors have been presented in our former paper [
21], we mainly focus on the analysis and discussion of the π model parameters variation and the performance variation mechanism of MEMS suspended inductors under mechanical shock in this paper.
2. Theoretical Analysis
The RF performance of MEMS suspended inductors can be analyzed with the π lumped-element equivalent model.
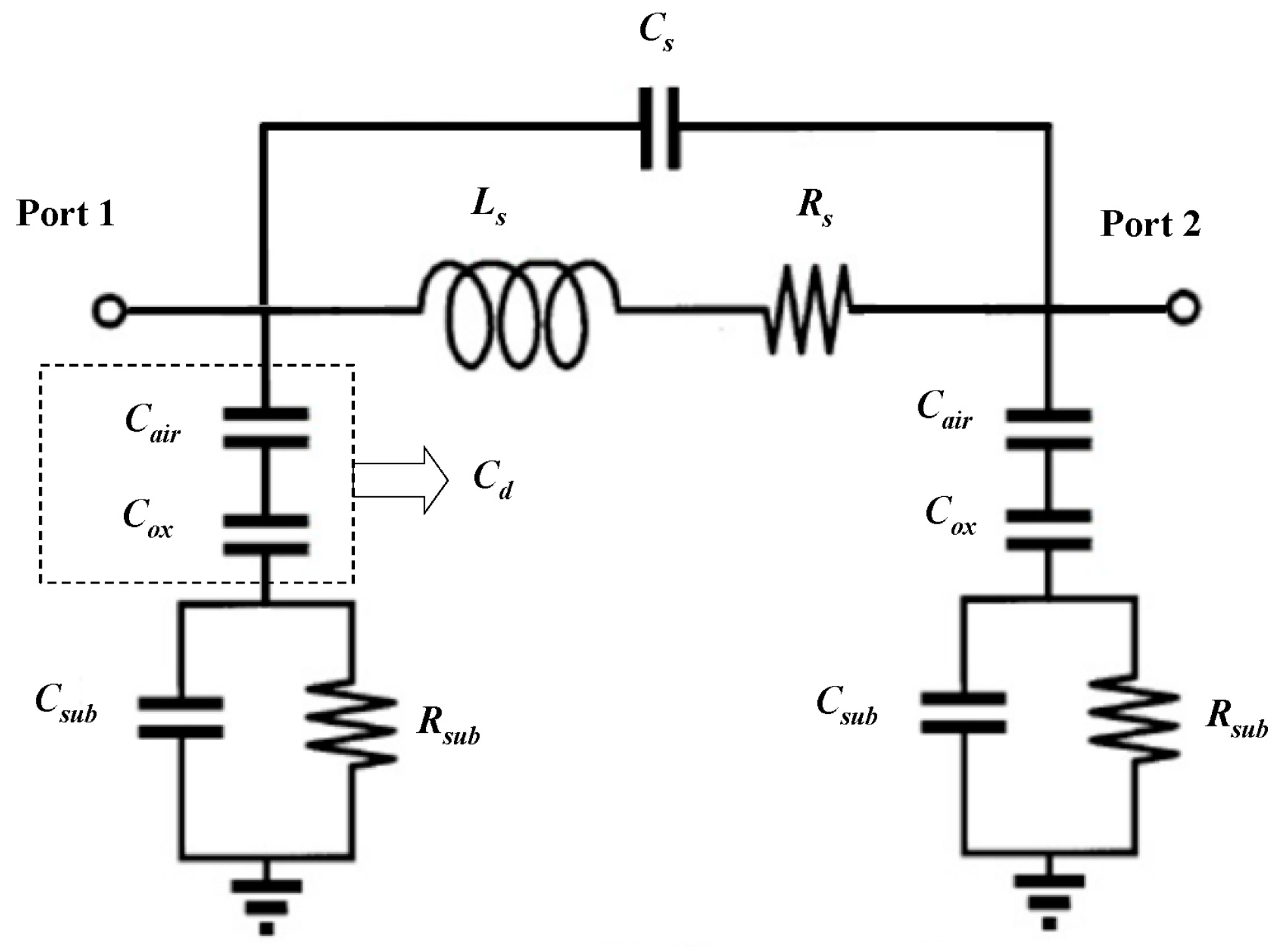
Figure 1 shows the π model consisting of eleven elements. The equivalent circuit in
Figure 1 consists of a series branch and two parallel branches. The series branch characterizes the parameters of the inductor coil and the parallel branch characterizes the parasitic parameters of the silicon substrate.
2.1. Series Branch of π Model
The series branch of π model consists of three elements: the series inductance of the inductor coil , the series resistance of the inductor coil , and the series capacitance .
The series inductance
characterizes the ability of the inductor to store magnetic energy and it can be considered as a constant mainly decided by the geometry of the inductor coil when the wire thickness is thin and the working frequency is high. For the planar spiral inductor coil, the inductance value
can be calculated with the Greenhouse method [
22]. The Greenhouse method calculates the inductance value of the inductor coil by summing the self-inductance of each wire segment and the positive and negative mutual inductance between the wire segment pairs.
The series resistance
represent the metal loss mechanism which should be expressed as the alternating current (AC) resistance of the inductor coil. Besides the material conductivity and the cross-sectional area of the wire segments,
is also related to frequency. The AC resistance of the conductor is higher than that of direct current (DC) resistance and the AC resistance increases with frequency because of the existence of skin effect. The series resistance
can be expressed as [
14]:
where
,
, and
represent the resistivity, length, and width of the wire, respectively.
represent the effective thickness defining the area of current flowing which can be expressed as Equation (2).
where
and
represent the thickness of the wire and the skin depth of the wire material, respectively. The skin depth can be calculated with:
where
and
represent the permeability of the wire material and the frequency, respectively.
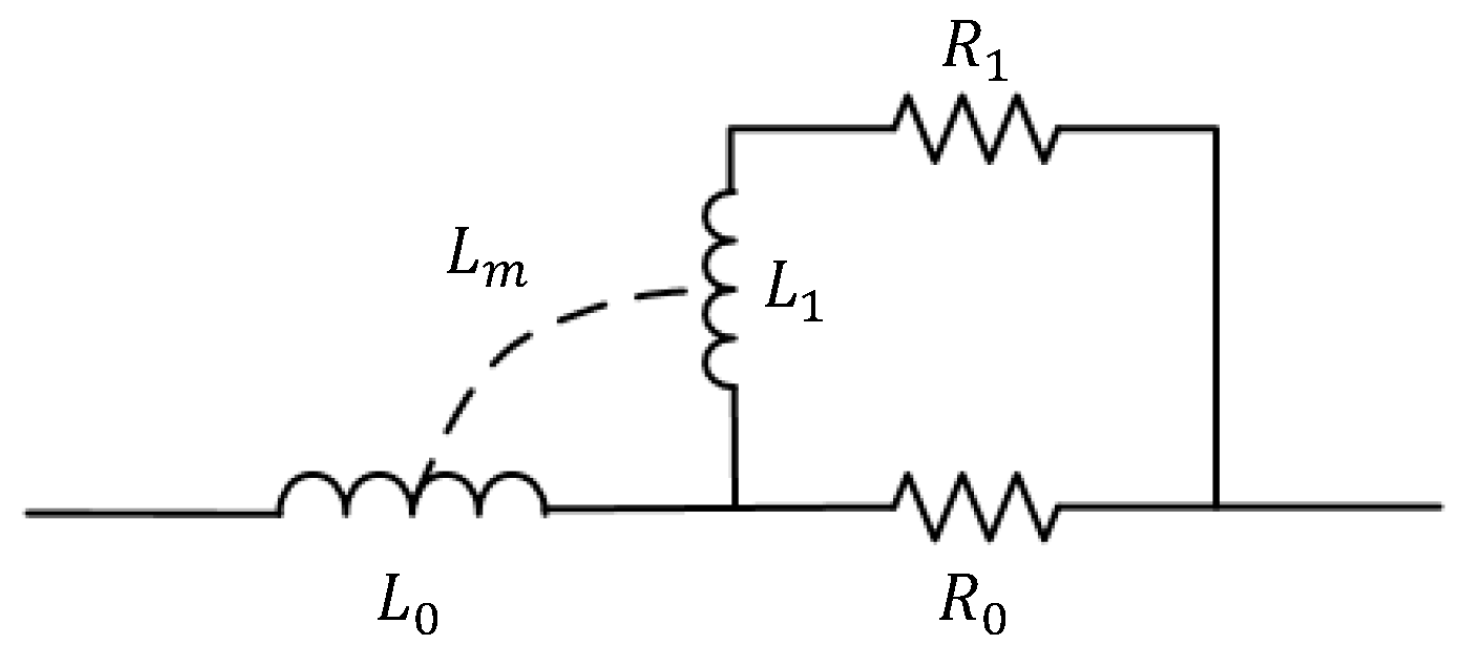
According to [
18], the series resistance and inductance can also be modeled as a ladder circuit as
Figure 2 shows.
and
indicated the series resistance and inductance of the wire in DC condition. To take skin effect and proximity effect into account, the additional resistor-inductor branch which includes
and
in
Figure 2 is introduced to represent each conduction layer in depth and the mutual inductance
is added to model the magnetic interaction between the external field and internal current. The analytical equation of each parameters in the ladder circuit can be referred to [
18].
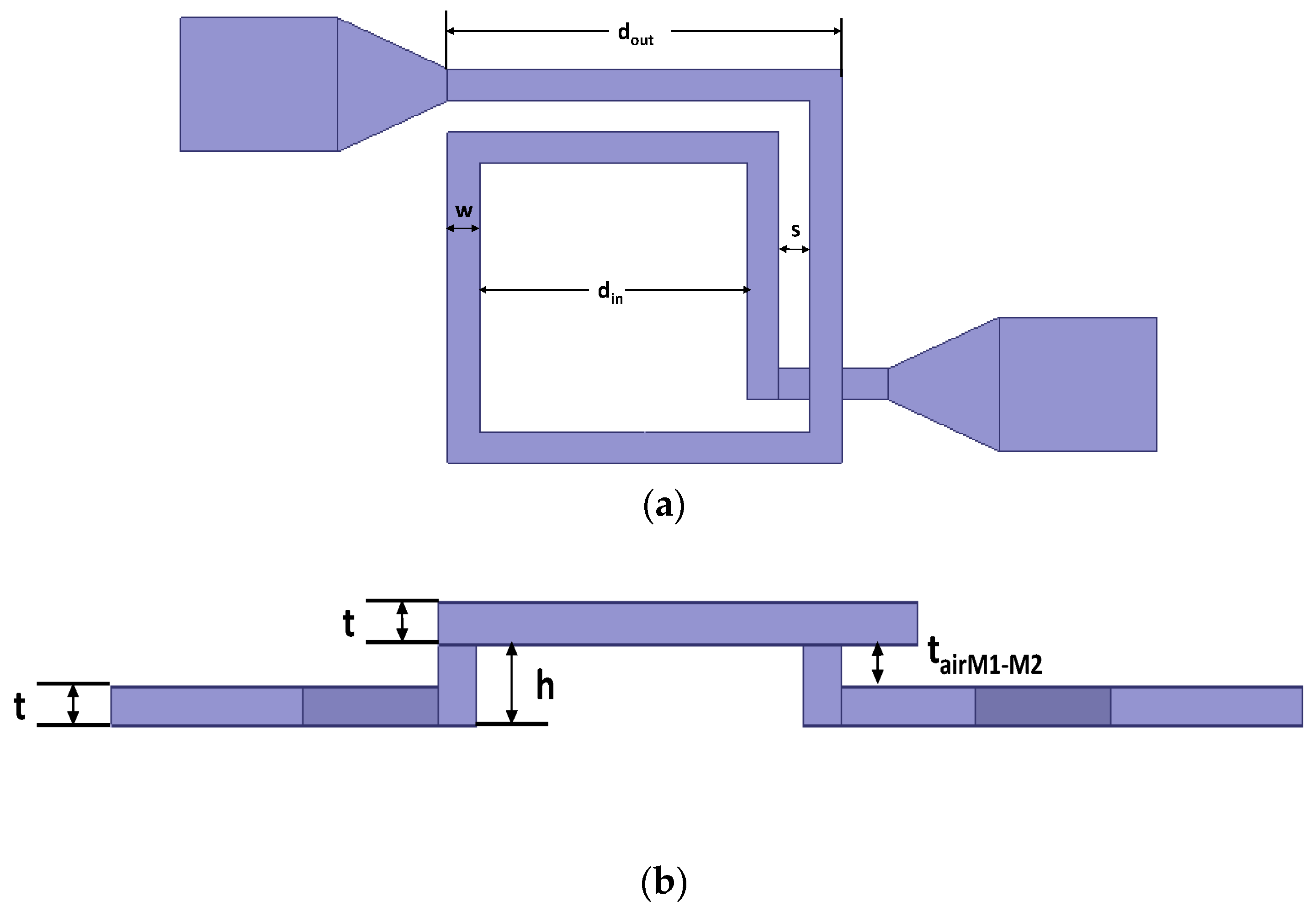
The series capacitance
mainly represents the coupling capacitance caused by the overlap between the inductor coil and the underpass because the adjacent turns are almost equipotential and the effect of the crosstalk capacitance is negligible [
14]. The wire and the underpass can be considered as the upper and lower plates of the parallel plate capacitor. So, the series capacitance can be expressed as:
where
represents the number of overlap,
represents the permittivity of air,
represent the air layer thickness between the inductor coil and the underpass.
is related to the suspension height
,
indicates the distance between the inductor coil and the upper surface of the insulating layer, the thickness of the underpass line is equal to the coil wire thickness
.
indicates the overlapping area between the coil and the underpass.
2.2. Parallel Branch of π Model
Each of the parallel branches of π model consists of three elements: the dielectric layer capacitance , the substrate parasitic resistance , and the substrate parasitic capacitance .
An air layer exists between the inductor coil and the surface of the oxide layer, which is the difference between MEMS suspended inductors and traditional on-chip inductors. So, an air layer capacitance
is added to the traditional π model and the dielectric layer capacitance
consists of
and the oxide capacitance
as
Figure 1 shows. Considering the inductor coil as the upper plate of the capacitor and the substrate surface as the lower plate of the capacitor,
and
can be calculated with:
where
and
represents the suspension height and the oxide layer thickness respectively and
represents the permittivity of the oxide layer.
A larger area of the inductor coil and a lower suspension height will make the dielectric layer capacitance become higher and the capacitance coupling effect of the MEMS suspended inductor become more significant.
and
represent the silicon substrate parasitic resistance and capacitance respectively.
models the high-frequency capacitive effects occurring in the semiconductor silicon.
and
can be approximately proportional to the area occupied by the inductor and they can be calculated with Equations (7) and (8) respectively.
where
and
are conductance and capacitance per unit area for the substrate.
and
depend on the substrate type and the substrate doping, they can be extracted from measurement results.
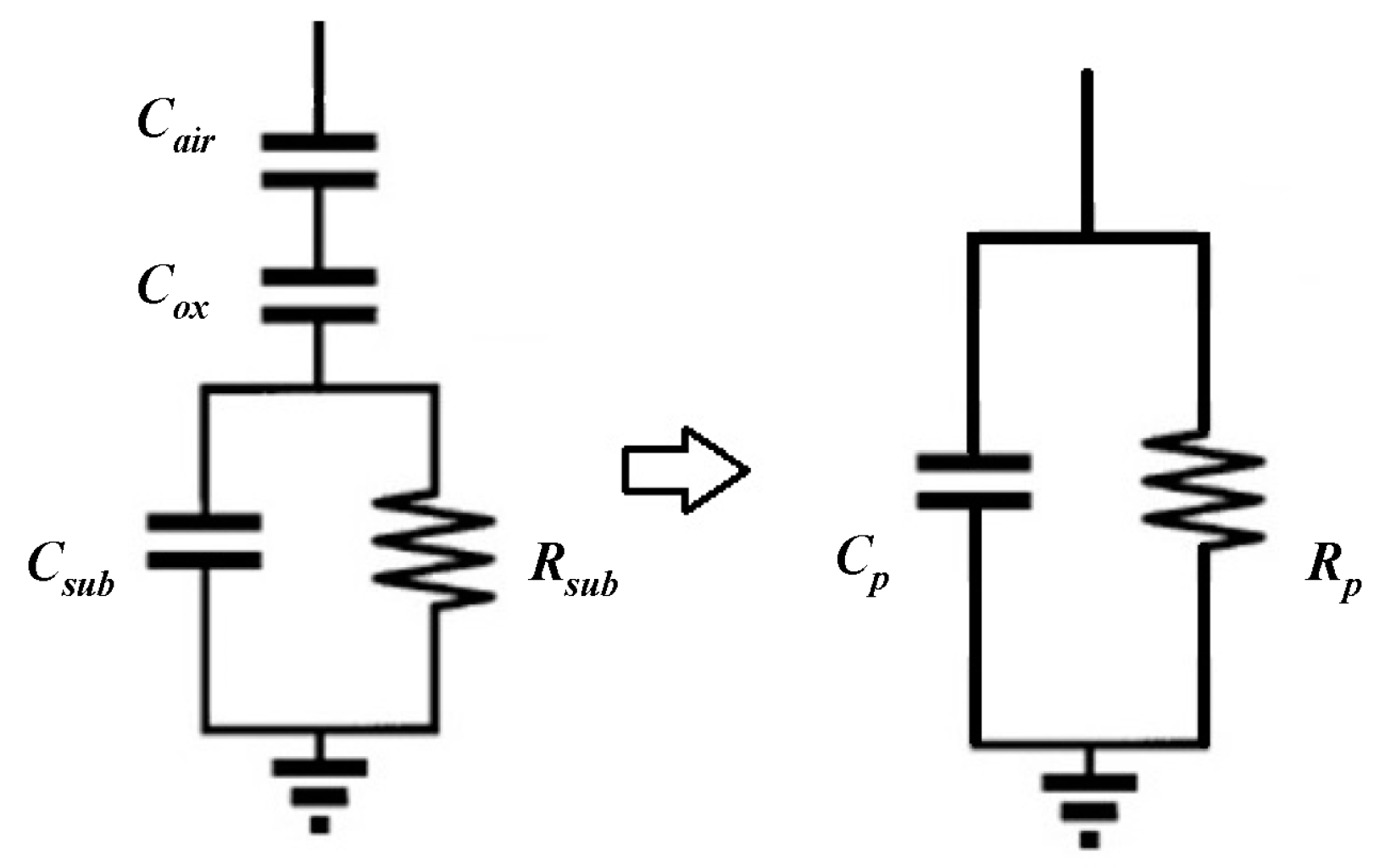
The parallel branch of the π model can be simplified to a resistor–capacitor parallel circuit as
Figure 3 shows.
The resistance
and the capacitance
represent the substrate loss and the overall substrate parasitic capacitance and they can be expressed as:
where
can be expressed as:
The quality factor Q of the MEMS suspended inductor can be expressed as:
where
,
,
represent the peak magnetic energy, the peak electric energy, and the energy loss in one oscillation n cycle respectively. They can be expressed as:
By substituting Equations (13)–(15) into (12), the quality factor Q can also be expressed as:
where the first term represents the magnetic energy stored and the ohmic loss in the inductor coil, the second term represents the energy dissipated in the silicon substrate which represents the substrate loss and the third term represents the self-resonance factor which describes the decrease of Q as the peak electric energy increases.
As the shock sensitive direction of the suspended inductor is perpendicular to the plane of the coil, the plastic deformation of the suspended inductor is mainly reflected in the variation of the suspension height, which is the distance between the coil and the substrate. The variation of the suspension height leads to the variation of series capacitance and the air layer capacitance . The geometric parameters of the inductor coil i.e., coil length, wire width, and wire thickness will not vary greatly when the suspended inductors are shocked so the series inductance and the series resistance will not vary greatly. The substrate parasitic resistance and capacitance will also not vary significantly because they are related to the coil length, the wire width of the inductor coil, and the doping of the silicon substrate.
When the suspended inductors are shocked and plastic deformation occurs to them, the suspension height will decrease. The distance between the plates of the capacitor decreases when the value of decreases, which will lead to the increase of the capacitance of and according to the Equations (4) and (5) and the electric energy stored in the inductor will also increase. From Equations (9) and (10), it can be seen that will decrease and will increase as increases. The variation of and will lead to the increase of the peak electric energy and the energy loss in one oscillation n cycle so the quality factor Q will decrease when the suspended inductor is shocked and plastic deformation is occurred to the inductor coil. From Equation (16), the effect of shock on the quality factor Q variation is reflected in the two terms of substrate loss and self-resonant factor. The smaller the is, the more serious the substrate loss is. The higher the and are, the more the electric energy stored by the suspended inductor is. A lower the Q value indicates a worse performance of the suspended inductor.
4. Results and Discussion
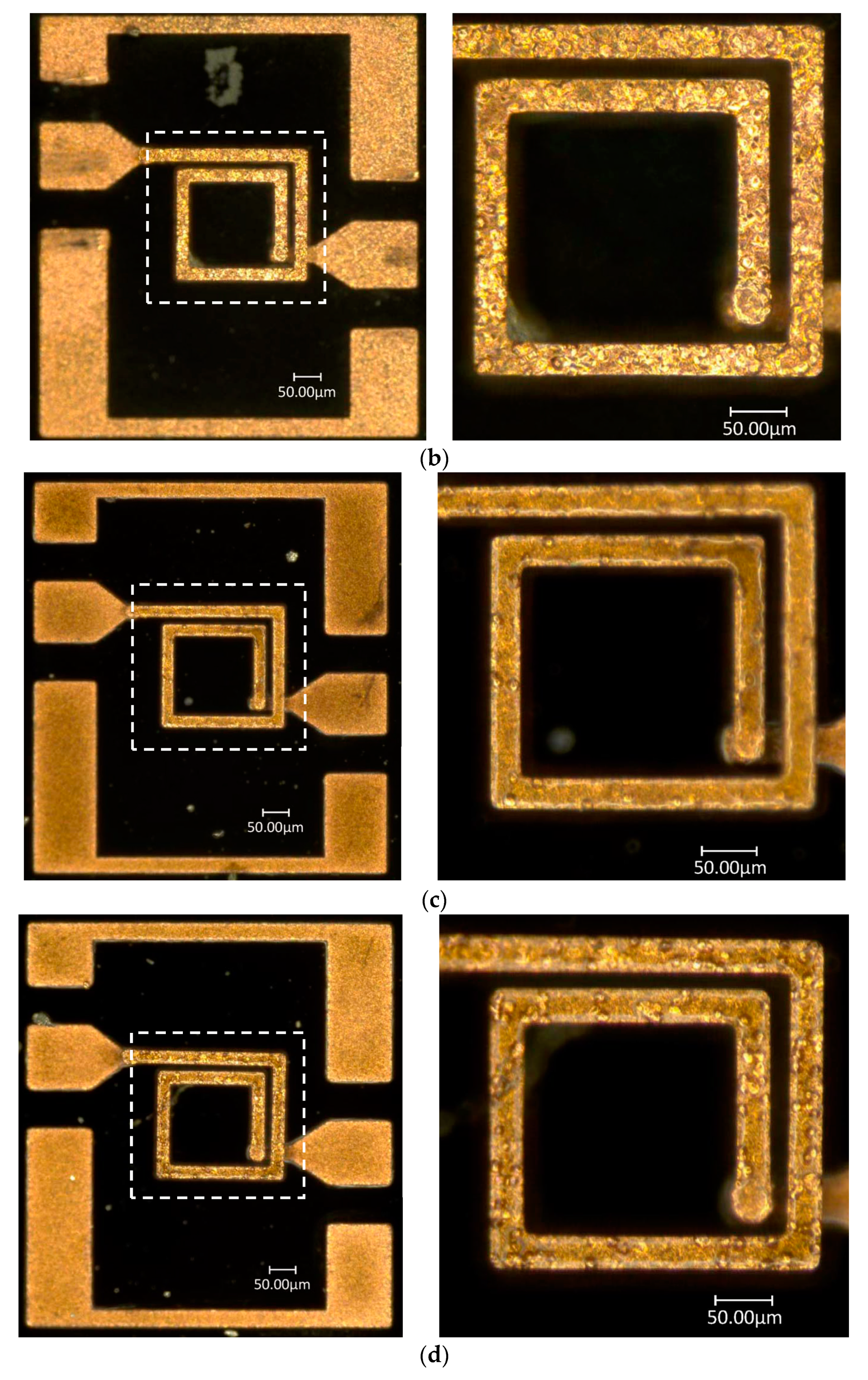
The performance of four inductors was measured, one of which was an unshocked inductor and the other three were the inductors shocked by three kinds of shock loads with amplitudes of 12,500 g, 13,900 g, and 16,600 g, respectively. The pictures of the three shocked inductors are shown in
Figure 10.
From
Figure 10 we can find that plastic deformation occurred to the inductor coils after they were shocked. The inductors after the 13,900 g and 16,600 g shock test had a severer deformation than the inductor after the 12,500 g shock test. We can also find that the inductor coil deforms horizontally besides deforming vertically and the spacing of the coils decreases after shock test from
Figure 10, especially for the inductor after the 16,600 g shock test.
With finite element simulation software ANSYS, the variation of the Von Mises equivalent stress and the deformation, which is the decrease of the suspension height, of the inductor coil during shock, can be obtained. The results are listed in
Table 1.
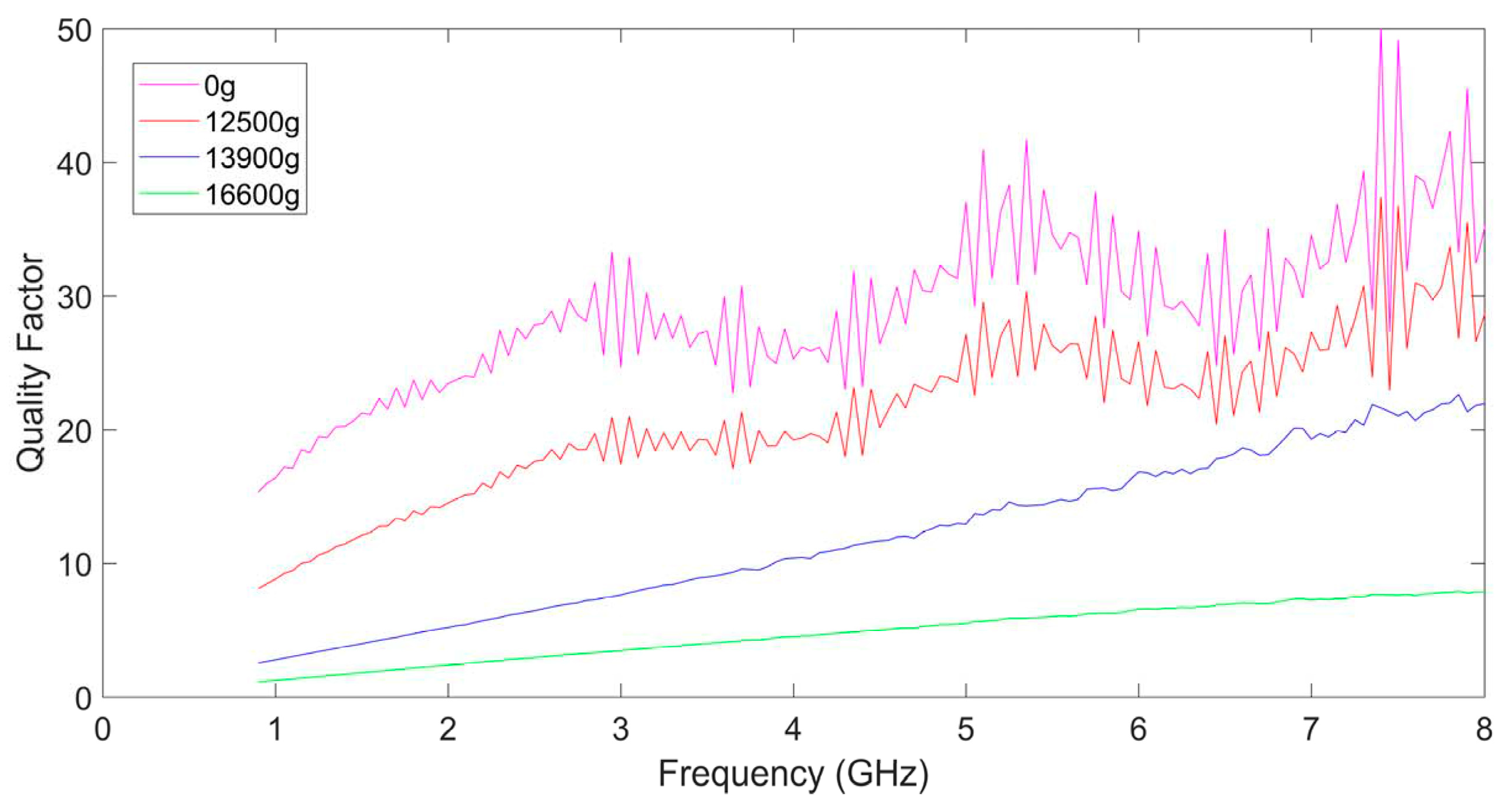
The S parameters of these MEMS suspended inductors were measured by an Agilent N522A vector network analyzer and a Cascade probe station. The de-embedded quality factors of the four inductors are shown in
Figure 11.
As shown in
Figure 11, the maximum quality factor of the inductor, which had not been shocked, reached ~40 at 7.5 GHz. When the inductor was shocked by a 12,500 g shock load, the maximum quality factor of the inductor could reach ~30. When the shock amplitude was 13,900 g, the maximum quality factor of the inductor decreased to 23. The maximum quality factor was only 7.8 and the curve became much smoother compared to that of the inductor before the shock test when the shock amplitude reached 16,600 g. From
Table 1 we can find that the maximum deformation is about 8 μm when the inductor was subjected to a 16,600 g shock, which means the coil deformed severely and it was close to the underpass and the substrate. The loss brought by high parasitic capacitance is more serious at high frequencies which made the quality factor greatly damped. As the amplitude of the shock load increases, the maximum quality factor of the MEMS suspended inductor decreases, which means the performance of the inductor becomes worse.
The values of each π model elements:
,
,
,
, and
can be extracted with the method in [
13,
19,
20] by using the S parameters.
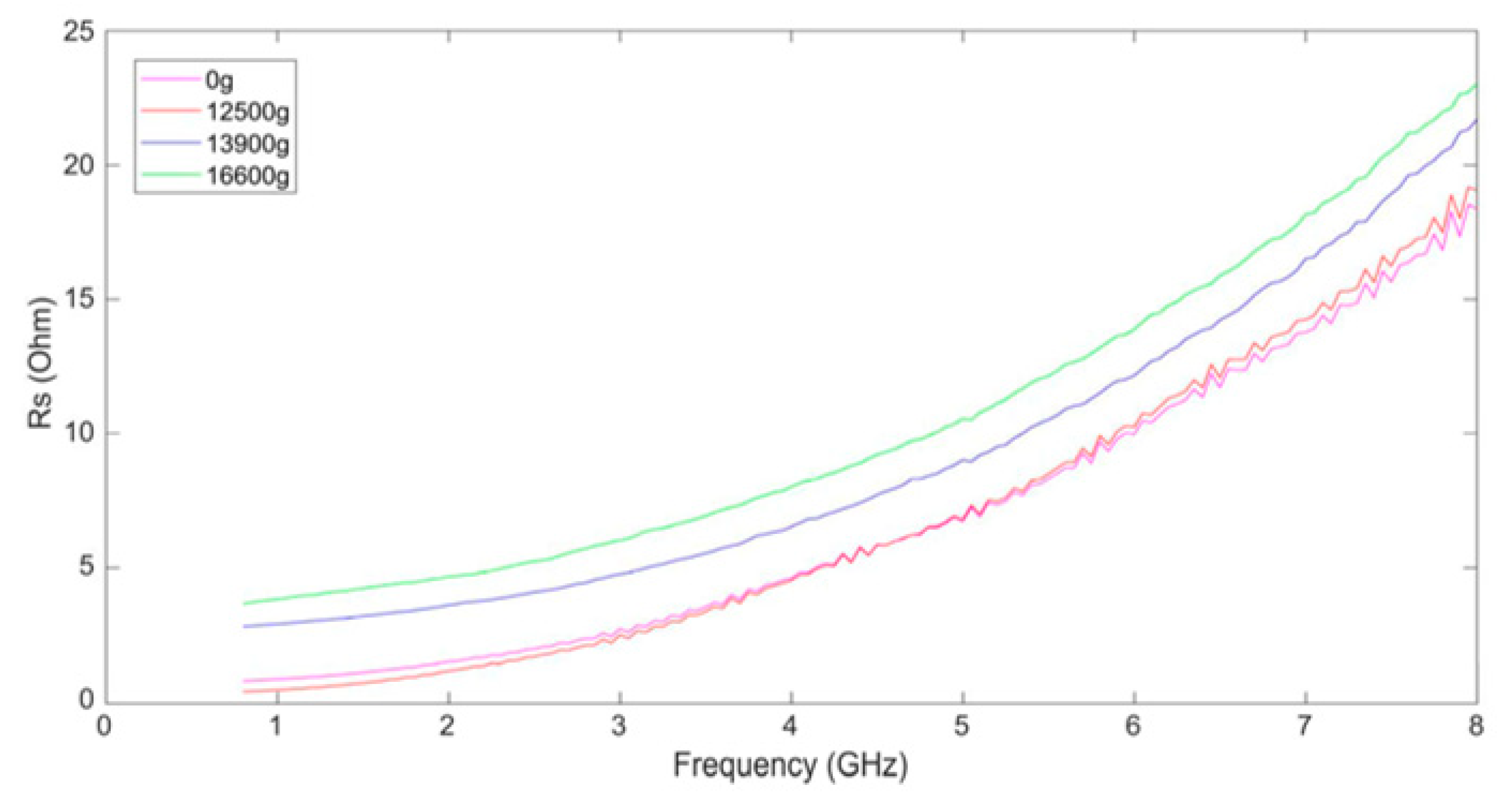
Figure 12 shows the series resistance
of the inductors. From
Figure 12 we can find that the series resistance of the inductors increases with the frequency because of the skin effect. The skin effect results in current flowing in the outer area of the wires and the effective cross-sectional area of the wires decreases when the frequency is high.
It can be found that the
curve of the inductor shocked by 12,500 g is not greatly varied from that of the unshocked inductor from
Figure 12. However, when the shock amplitude rises to 13,900 g and 16,600 g, the series resistance of the inductor coil increases, which means that the mechanical shock also leads to the increase of ohmic loss of the MEMS suspended inductor. We believe that this is because the enhancement of the proximity effect of the wires. The mechanism of the proximity effect is the superposition of the excitation current and the eddy currents, which is caused by the magnetic field generated by the adjacent wire, changes the current distribution in the wires and results in the decrease of the effective cross-sectional area of the wires [
18,
23]. The proximity effect leads to the increasing of the effective resistance of the inductor wires. From
Figure 10, we can find that the inductor coil deforms horizontally besides deforming vertically, which results in the decrease of the spacing between the adjacent wires of the inductor coil. The decrease of spacing will lead to the increase of the eddy currents in wires because the influence of the magnetic field generated by the adjacent wire on them are enhanced, which indicates the enhancement of the proximity effect.
Figure 13 shows the series inductance
of the inductors. From
Figure 13 we can find that
does not vary much with frequency. The series inductance values of the inductors are all in the range of 1.1–1.3 nH and the inductance values of the shocked inductors are not varied greatly from the unshocked inductors. So, the wire width, wire thickness, and length of the coil have not varied greatly after the inductors are shocked.
According to Equation (4) in
Section 2.1, the series capacitance
is related to the suspension height of the coil. So, the series capacitance
can be predicted and calculated with the simulated deformation of the coil in
Table 1. The calculated and the extracted series capacitance are listed in
Table 2.
From
Table 2 we find that the extracted
of the unshocked inductor agrees with the calculated
. When the inductor was shocked by 12,500 g, the extracted
has little variation and it is less than the calculated
. This means that only slight plastic deformation occurred to the inductor coil as the maximum Von Mises stress of the coil (90.31 MPa) is below the yield strength of copper (100 MPa [
24]). When the shock amplitude was 13,900 g, the extracted
increases which means obvious plastic deformation occurred to the coil. The extracted
is less than the calculated
, we believe that this is because the maximum Von Mises stress (101.16 MPa) is near the yield strength of copper and the actual deformation of the coil is less than the simulated maximum deformation. When the shock amplitude is 16,600 g, the extracted
agrees with the calculated one which means severe plastic deformation occurs to the coil. As the shock load amplitude of the suspended inductors increases, the series capacitance
increases, which means that the suspension height of the coil decreases. As the shock amplitude becomes higher, the decrease of the suspension height becomes more significant, which is consistent with the theoretical analysis in
Section 2.
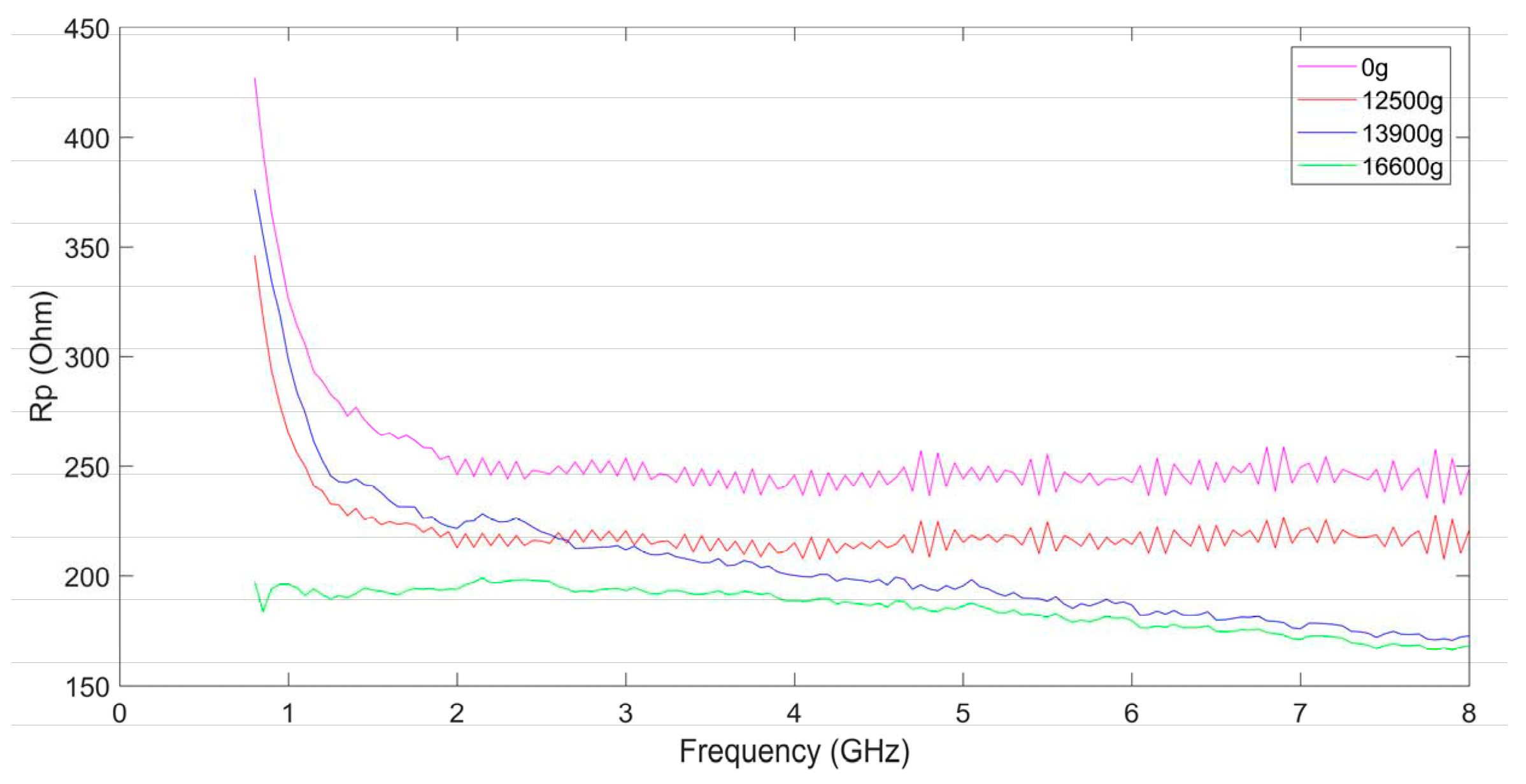
Figure 14 and
Figure 15 show the parasitic resistance
and the parasitic capacitance
in the equivalent model of the suspended inductor.
and
represent the substrate loss and the overall substrate parasitic capacitance respectively. They represent the combined effects of
,
, and
in the parallel branches of the π model.
and
are frequency depended.
From
Figure 14 we can find that the parasitic resistance
decreases as the frequency increases, which indicates that the influence of the substrate loss on the inductor performance is much more significant at higher frequency. The higher the shock amplitude is, the smaller the parasitic resistance is, which is consistent with the theoretical analysis in
Section 2. The decreasing of
indicates that the substrate loss becomes severer with the increases of the shock amplitude.
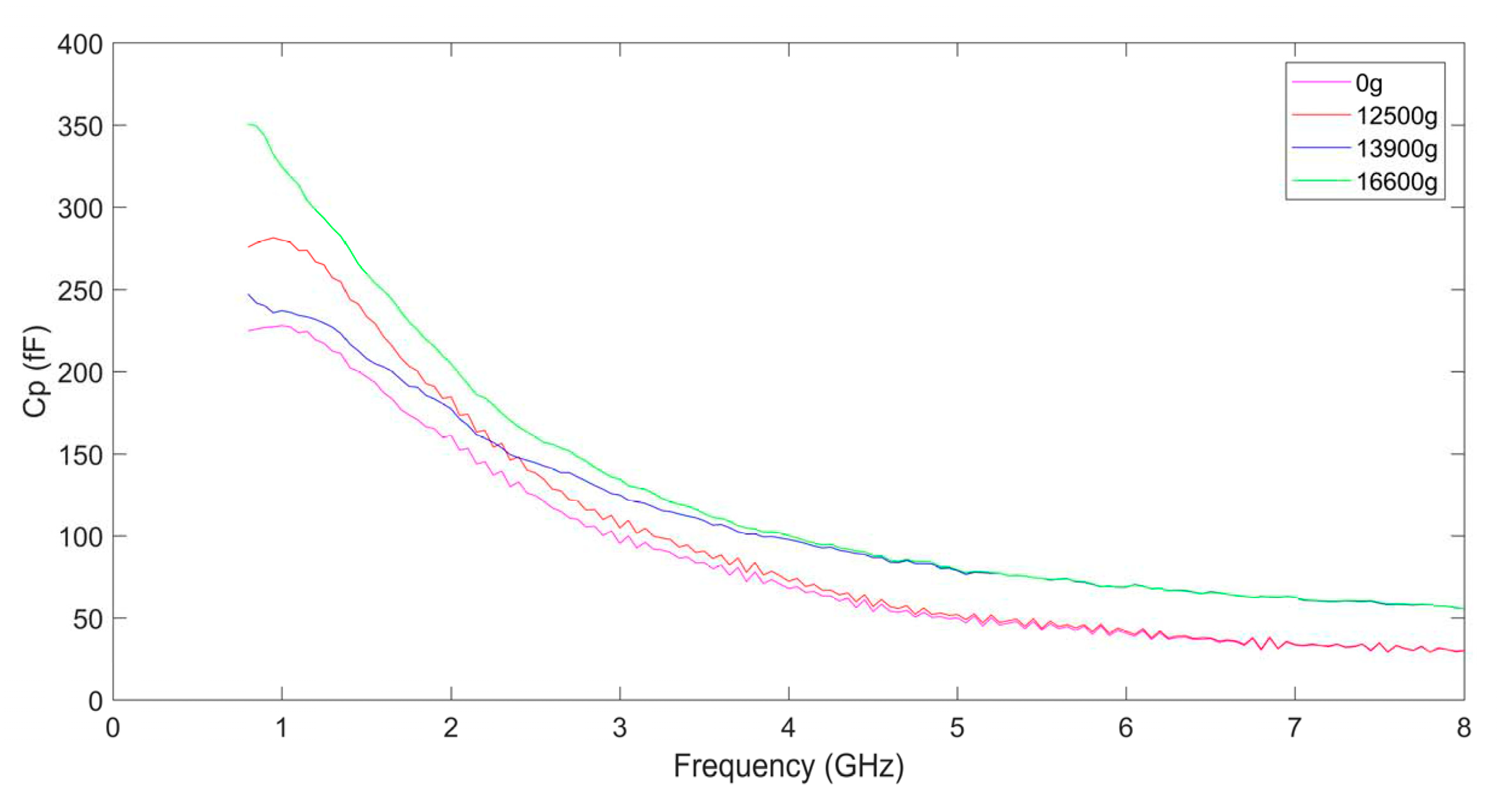
From
Figure 15 we can find that the parasitic capacitance
also decreases as the frequency increases, which indicates that the capacitance of the inductor has more significant influence on the inductor performance at lower frequency. The higher the shock amplitude is, the higher the parasitic capacitance is. The electric energy stored by the suspended inductor will be more as the parasitic capacitance is higher. Besides
,
, and
, the parasitic effect of the substrate also has influence on the performance of the MEMS suspended inductor. Although
,
, and
did not vary much after the inductor shocked by 12,500 g shock load, its Q factor still decreases obviously as the parasitic resistance decreases and the parasitic capacitance increases.
The influence of shock on the performance of the MEMS suspended inductor is reflected in the following aspects: the increase of ohmic loss caused by the increase of the series resistance , the increase of substrate loss caused by the decrease of the parasitic resistance , the increase of electric energy stored by the inductor caused by the increase of the series capacitance and the parasitic capacitance .


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}