
A Radiometric Uncertainty Tool for the Sentinel 2 Mission



Abstract
:
1. Introduction
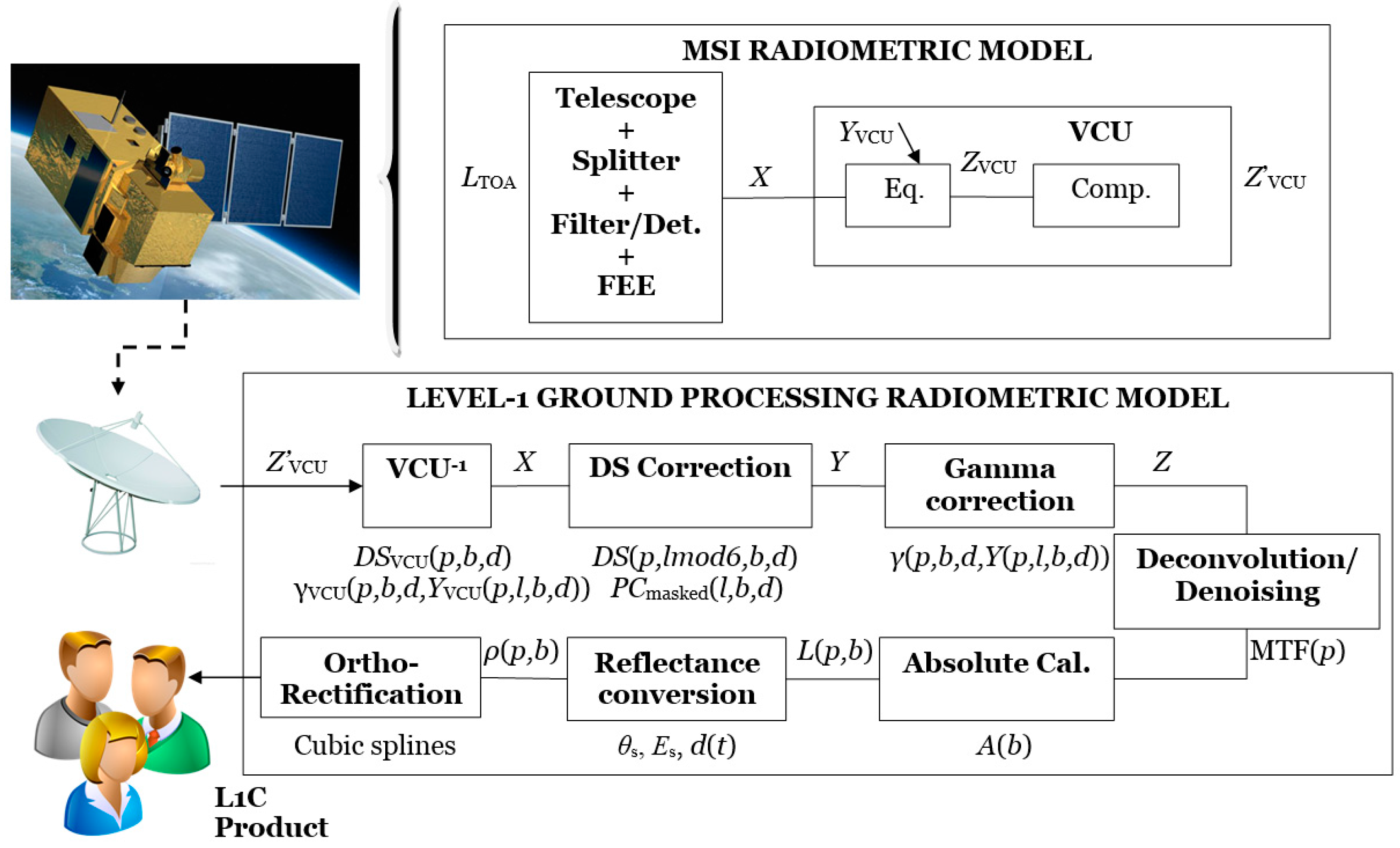
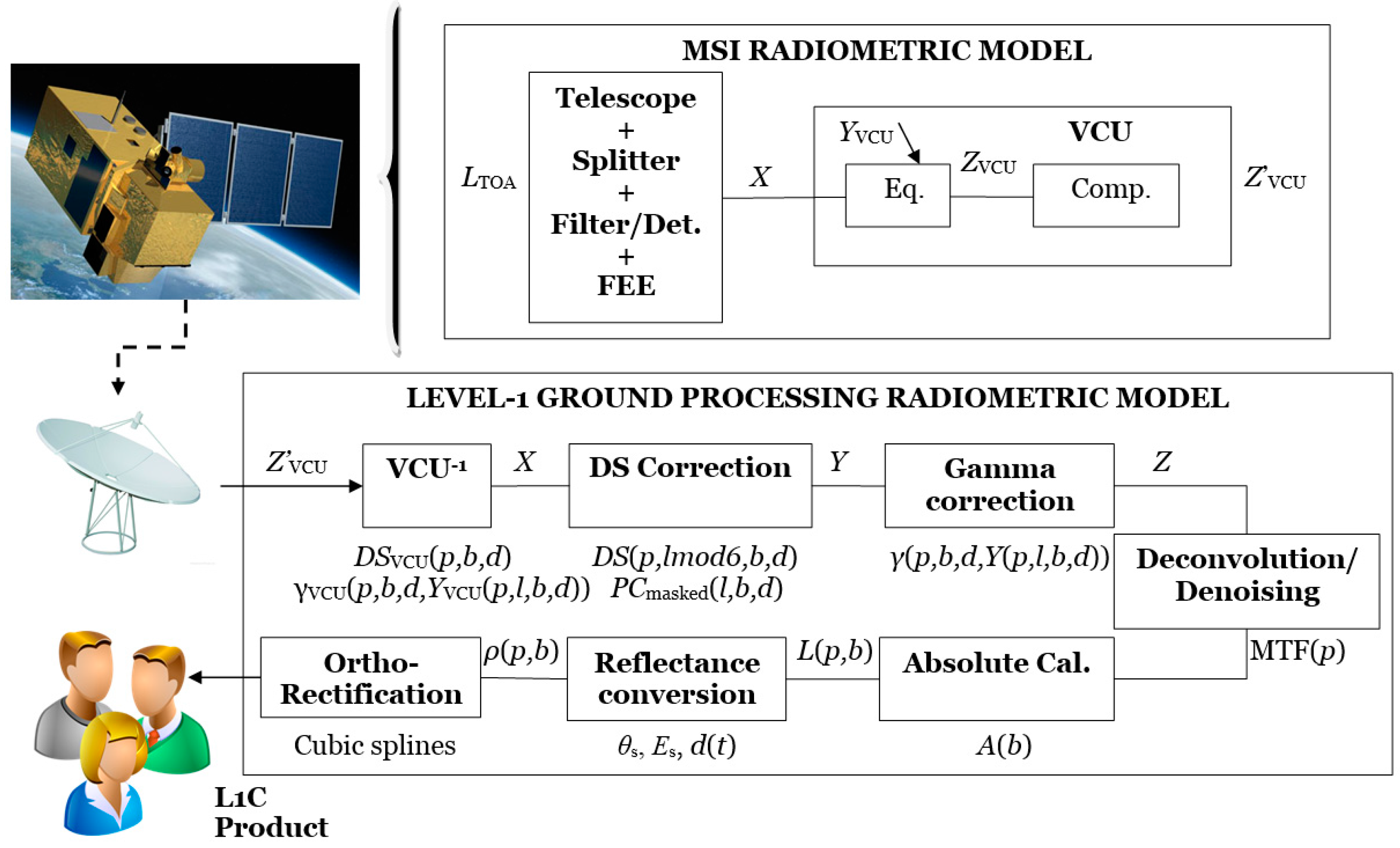
2. Sentinel 2 Level-1 Radiometric Model
3. Radiometric Uncertainty Contributions
3.1. Uncertainty Contributions: Identification
- The dark signal knowledge is well known to be below the 0.1 DN level as a consequence of the averaging of several hundreds of samples. If the samples are fully uncorrelated, the standard deviation of the mean describes the associated uncertainty. When this is not the case, alternative methods such as the Allan deviation have been described and applied to the S2 dark datasets in [16]. In that case, it was demonstrated how hundreds of samples can be considered as independent in the dark dataset for most of the pixels and bands. Thus, the averaging of hundreds of samples reduces the noise by a factor well above 10.
- The compression noise has been optimised so that Ntotal ≤ 1.2 NeDL. Here Ntotal refers to the instrument and compression noise and NeDL refers to the noise equivalent radiance without compression noise. The effect is thus limited to a worst-case situation of 20% of total noise level. The MSI instrument specifications for signal-to-noise ratio (SNR) are generally at Lref and are typically between 100 and 200 for most of the bands. The term Lref denotes the reference radiance for the MSI design and can be found in [11]. The compression noise is thus a contribution that in most of the scenarios can be assessed as <0.1%. Nonetheless, this might not be true for specific cases—e.g., low radiance measurements. For example, setting the worst-case situation with an SNR of just 50 and worst-case compression rate (Ntotal = 1.2 NeDL), the error could scale up to 0.4%. Future versions of the tool will consider more specific cases by monitoring the compression rates.
- The L1B image quantisation has a minimum impact since the ground processing uses a double datatype (i.e., 32 bits).
- The Angular diffuser knowledge—BRF effect. The vibrations and diffuser creeping limit the knowledge of the angular coordinates during calibration. This effect has a minimum impact in the BRF assessment due to the near-Lambertian shape of the diffuser on-board together with a low angular uncertainty. The same reasoning does not apply for the cosine correction and is further explained in Section 3.2.10.
- The Instrument noise and dark signal during calibration is well known to be below the 0.1% level. Similar reasoning as for dark signal knowledge can be inferred here. Even for a SNR of 50 as specified for B10 in [11], averaging over just 400 independent samples would reduce the noise below the 0.1% level.
- The Sun-to-satellite distance knowledge should have a negligible impact since the positioning of the satellite with respect to the Sun—which involves the Sun and Earth ephemeris, as well as satellite positioning—is declared to be known without significant error.
- The Angular observation knowledge—cosine effect is well known again because of the correct positioning of the satellite with respect to the Sun. In calibration mode, the micro-vibrations and diffuser creeping affect the diffuser coordinate system but does not affect the Earth surface and Sun positioning. Note that this tilting—e.g., micro-vibrations of the satellite, orbit precision, etc.—is accounted for in the Geometric knowledge contribution.
- Deconvolution residual. The signal deconvolution and denoising are considered for its compensation during the ground processing. The residual of this correction—so far not assessed—would represent the uncertainty to be included in the budget (deconvolution and denoising stages in Figure 1). This effect would take into account the Point Spread Function (PSF) dispersion by the mirror scattering but also the potential correction of ghosting effects in the across- and along-track. Although all these contributions are similar in nature, they should not be confused with the out-of-field stray-light—systematic part (described at Section 3.2.2), the out-of-field stray-light—random part (described at Section 3.2.3) and the optical crosstalk (described at Section 3.2.4).
- Polarisation error. This is considered not to be a major source of error for land measurement and is not corrected for during the ground processing—the polarisation sensitivity of the MSI instrument is <3% and the degree of polarisation (DoP) is generally <10% for most land measurements. Note, however, that for specific cases, the DoP could be above 10%—e.g., inner water and coastal measurements. For those cases, the error should be flagged and, if necessary, corrected as discussed in [16].
- Non-uniformity spectral residual. The relative gains are updated in-flight by measuring the solar illumination-reflected from the diffuser. The disagreement of the Sun spectral signature with respect to the nominal measurements of the Earth-reflected light introduces a systematic effect. A potential method to assess this uncertainty contributor could follow a similar methodology as for Landsat-8 Operational Land Imager (OLI) [18].
- The Ortho-rectification uncertainty propagation, involves the radiometric interpolation of the input data to transform the MSI focal plane measurements to a pre-defined grid on the Earth. Recent missions, such as S2, include a bi-spline interpolation of the data. Research in [17] has proposed a preliminary implementation of the propagation of the uncertainty through the resampling process. Further assessment should also consider the accuracy of the resampling with respect to the real scene fluctuations.
- The Spectral knowledge is produced as a consequence of the limited knowledge of the pre-flight spectral calibration and the subsequent post-launch variations. The pre-flight spectral knowledge is ultimately limited by the alignment and spectral characteristics of the calibration source. The post-launch variations are produced due to in-orbit temperature variations or temporal degradation, among others. In addition, the spectral response is typically associated with the mean for all the pixels across the focal plane. The residual of this effect is accounted in Non-uniformity spectral residual contributor. See [17] for the preliminary assessment and first implementation of this contributor.
- The geometric knowledge referred to here is the impact that the geometric uncertainty has in the radiometry. That is, how limitations in the pointing and the geo-location of the sensor can lead to error in the resultant products; this will be directly dependent on the degree of radiometric non-uniformity and the size of the scene being viewed. The nature of the effect will depend on whether the user requires a single pixel measurement or a larger area, since this effect will be largely correlated in the spatio-temporal domain.
3.2. Uncertainty Contributions: Description and Assessment
3.2.1. Instrument Noise
3.2.2. Out-of-Field Stray-Light Systematic Part
3.2.3. Out-of-Field Stray-Light Random Part
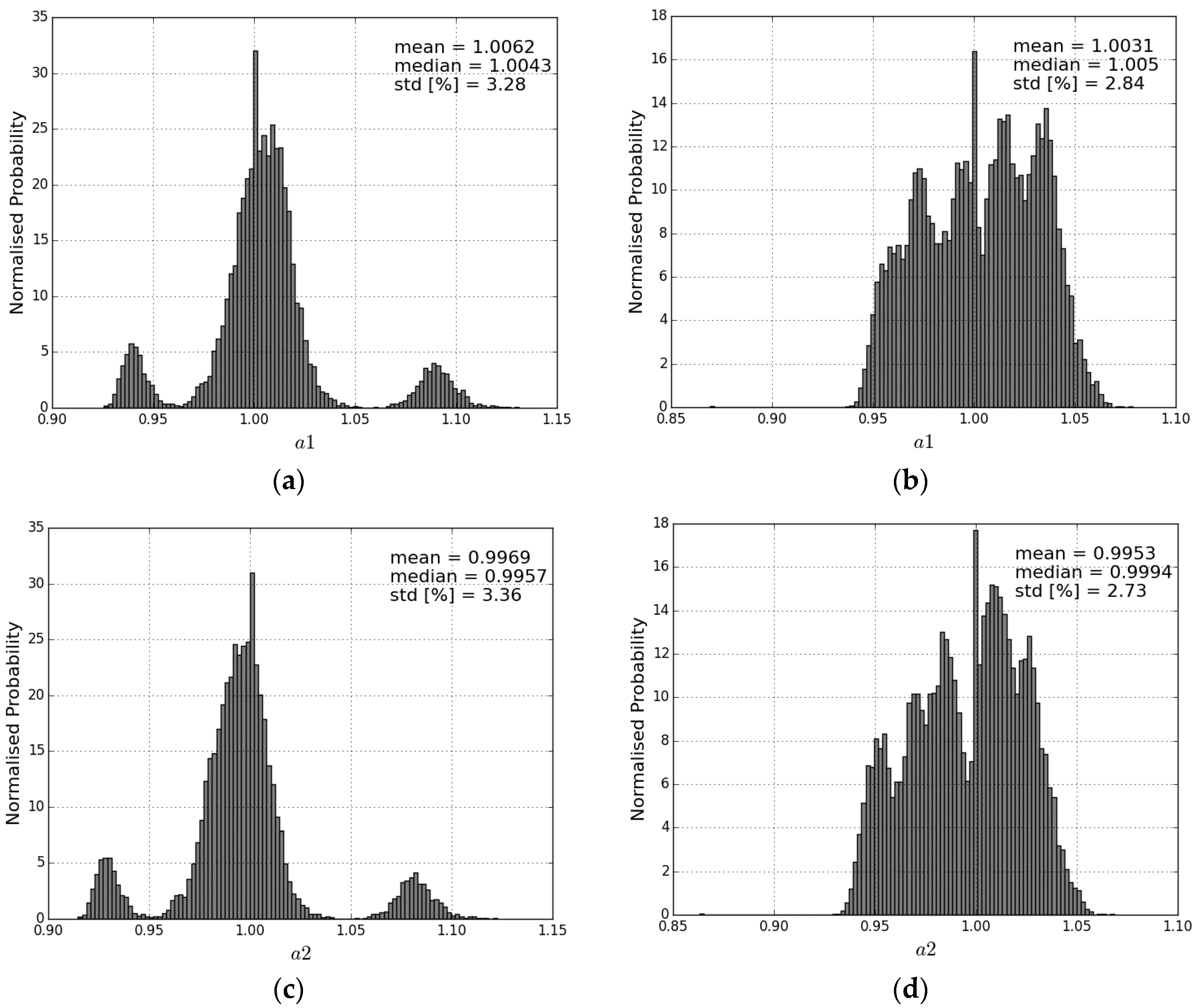
- The assumption of a normal distribution has not been verified. There is the possibility that this distribution actually approaches a rectangular one rather than normal.
- The effect is systematic at a pixel level. That is a similar offset will be expected independently of the scene for a specific pixel. The modelling as a distribution refers to the impossibility to know a specific offset at a pixel level.
3.2.4. Crosstalk
3.2.5. Analog-to-Digital Converter (ADC) Quantisation
3.2.6. Dark Signal Stability
3.2.7. Non-Linearity and Non-Uniformity Knowledge
3.2.8. Diffuser Reflectance Absolute Knowledge
3.2.9. Diffuser Reflectance Temporal Knowledge
- Uses the approximated degradation rate per-year based on MERIS for each of the S2 bands. This means that B1 = 0.15%/year, B2 = 0.09%/year, B3 = 0.04%/year, B4 = 0.02%/year and B5 = 0.01%/year. Any band above B5 is assumed to have a negligible degradation effect.
- Based on expected linear degradation, the tool extracts the timestamp of the image to calculate the systematic effect for the specific product.
3.2.10. Angular Diffuser Knowledge—Cosine Effect
3.2.11. Stray-Light in Calibration Mode—Residual
3.2.12. Image Quantisation
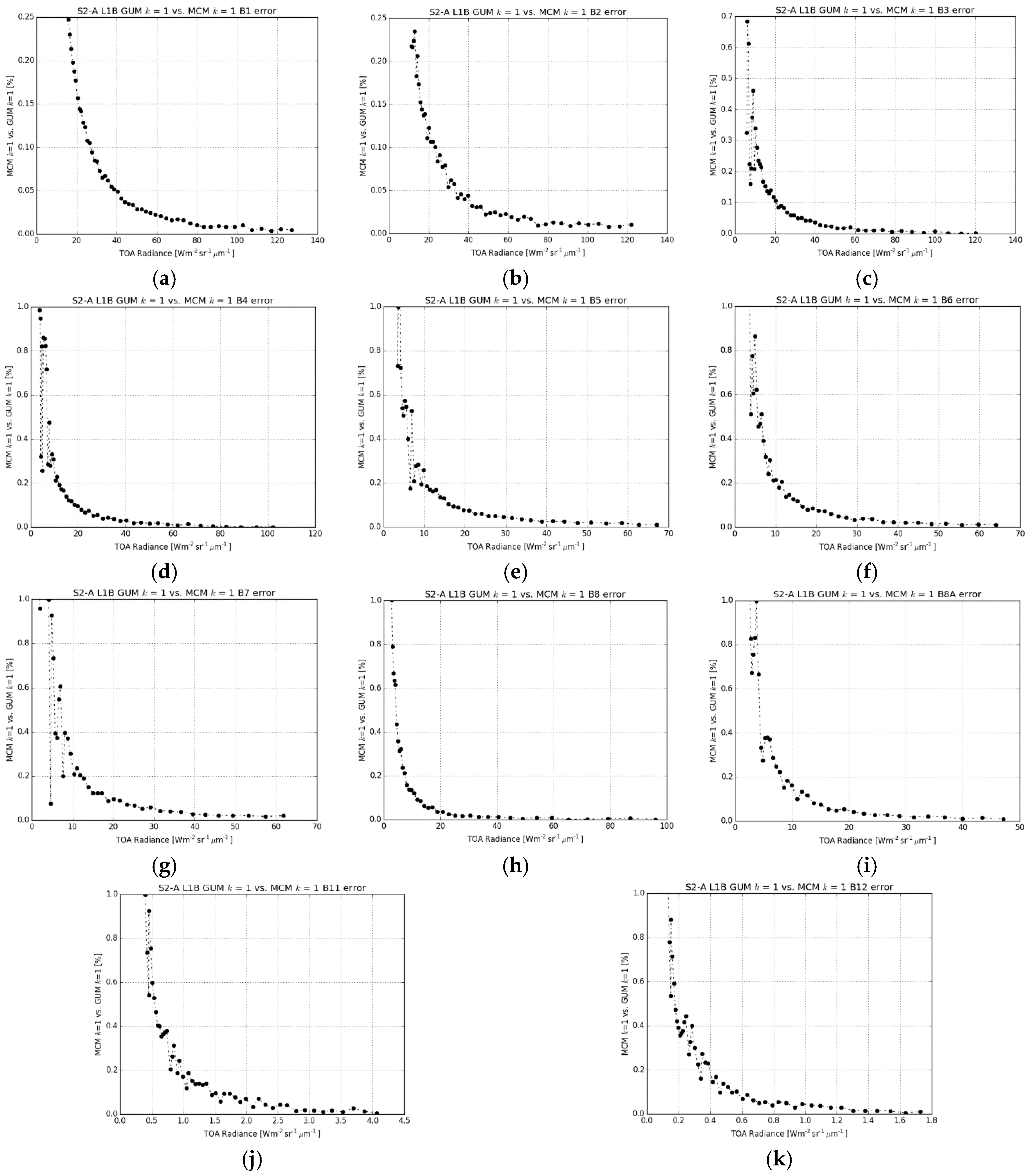
4. Model Combination and Validation
4.1. Model Combination
4.2. Discussion of the Linear Addition of Contributions
- Option 1: the combination in Equation (22) below is the one used in Equation (13) for the S2-RUTv1. It describes the addition of each systematic effect in absolute value and its addition to the expanded uncertainty. It is known that the diffuser degradation is expected to introduce a negative systematic effect (see Section 3.2.9), whereas the out-of-field stray-light’s systematic part is a positive systematic effect. Thus, this approach can be considered a pessimistic approach but makes sure that the uncertainty accounts for the potential uncorrected systematic errors.
- Option 2: the combination in Equation (23) adds linearly each of the contributors and adds the absolute value to the expanded uncertainty. This seems a logical approach from a radiometric point of view since the different sign of each systematic effect is accounted and compensated for. However, it brings a more challenging interpretation when the uncertainty associated with the knowledge of the systematic effect is large—i.e., when the uncertainty residual of a potential correction would be relatively high. This is indeed the case for the two systematic effects introduced in Equation (13).U = k · u + |b + c|,
- Option 3: the combination in Equation (24) adds linearly the maximum of the systematic effects and adds the absolute value to the expanded uncertainty. This is a good approach when there is a single dominant systematic effect with respect to the others and it is suggested in [8]. However, in Equation (13) this is not the case since the diffuser temporal stability depends on the instrument timestamp. That is, depending on the time, the weight of each of the two systematic effects could vary and thus also the maximum.
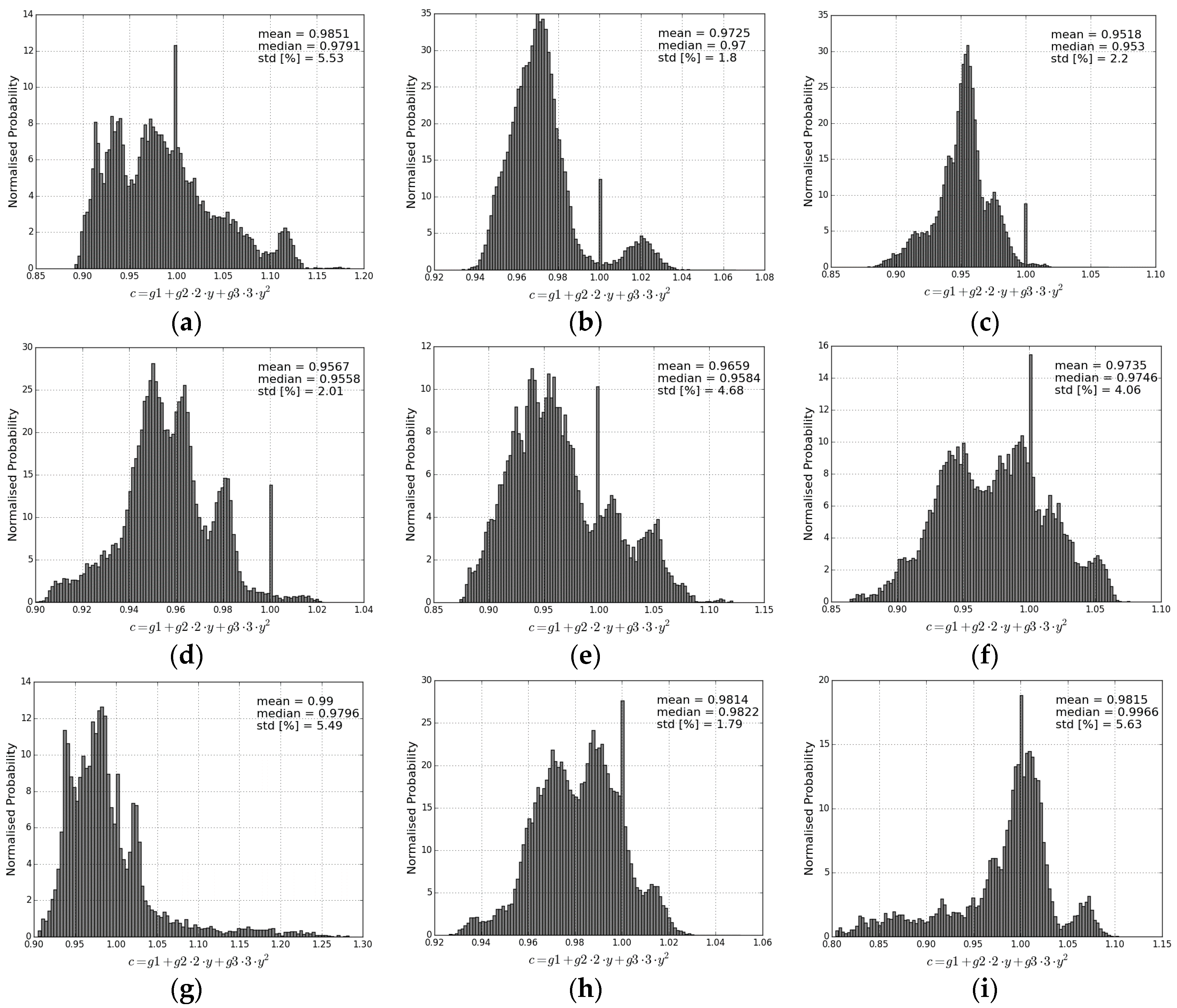
4.3. Sensitivity Coefficient Impact
4.4. Correlation between Uncertainty Contributors
- unoise vs. uDS. The dark signal stability and the instrument noise could be correlated by the temperature. However, this will be important when several pixels are combined across-track. In that case, variations of temperature will produce variations of both noise and DS in a proportional way. Here the DS signal is corrected for variations due to temperature by “blind pixels,” the residual of this correction uDS is uncorrelated with unoise since, despite being measured at the same time, different pixels are used to assess the performance.
- ustray_rand vs. uxtalk. It could be discussed whether the optical crosstalk is correlated since a similar optical mechanism produces both sources. Nonetheless, since the optical crosstalk has been minimised and the electrical crosstalk is the dominant source (see Section 3.2.4), any correlation has minimal effect.
- ugamma vs. udiff_abs, udiff_temp. These effects could also be correlated since the same measurements from the diffuser are used for both the gamma correction update and the diffuser absolute calibration. However, the update of the gamma correction in Equation (5) is completed in-flight by using only values Zsd and no conversion to radiance is necessary. It is important to note that ugamma is fully correlated with the Instrument noise and dark signal during calibration reported in Table 1; since this contributor has a negligible uncertainty level, the contributor, and hence correlation effect, is not included in the combination model.
- unoise vs. uADC. The instrument noise is propagated through the ADC quantisation. The two components can be assumed significantly uncorrelated for a noise larger than the quantisation effect. We explore this option further in Section 4.5 since, below a certain limit, the uniform distribution of ADC does not apply and the noise can be modulated by the digital conversion.
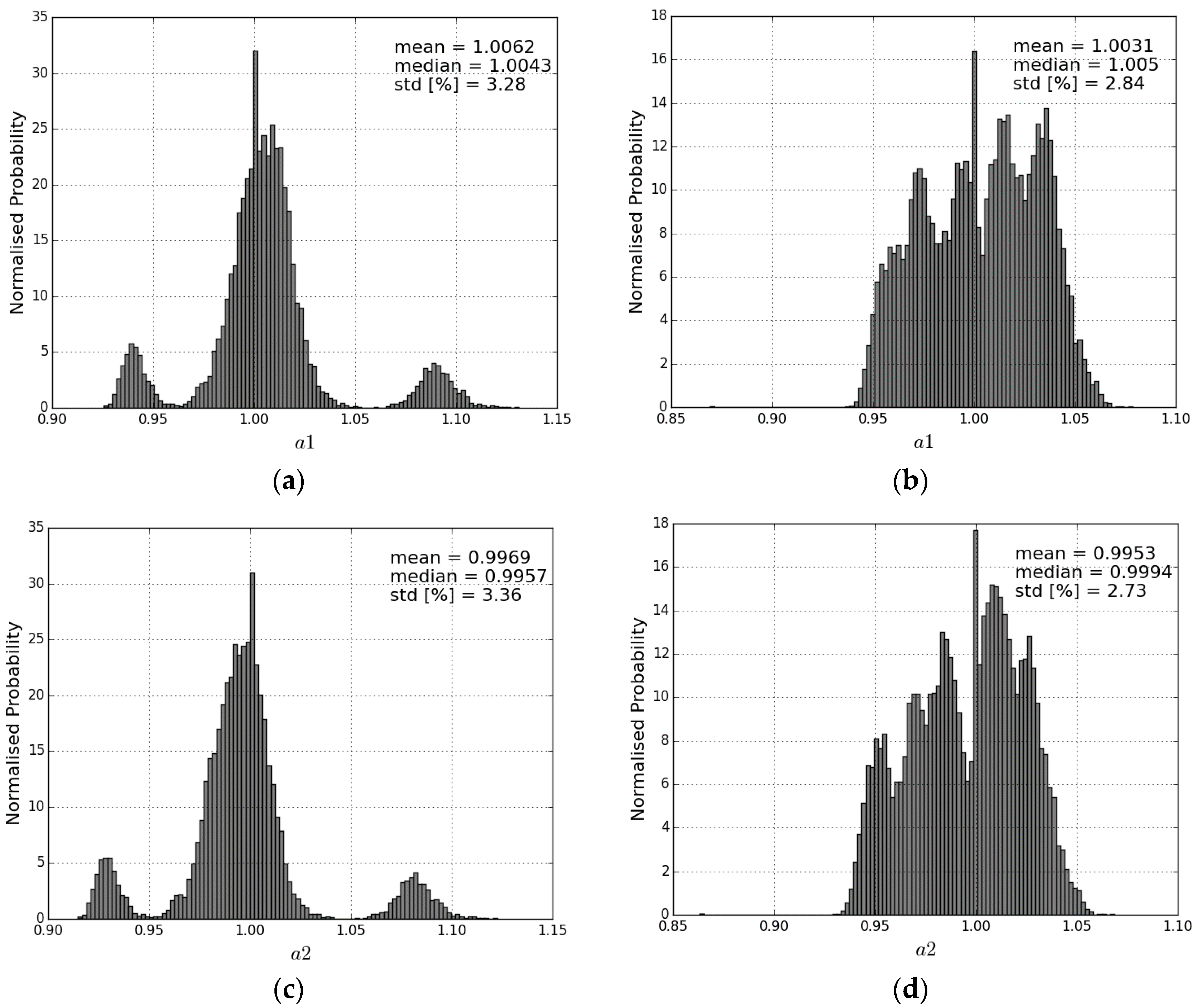
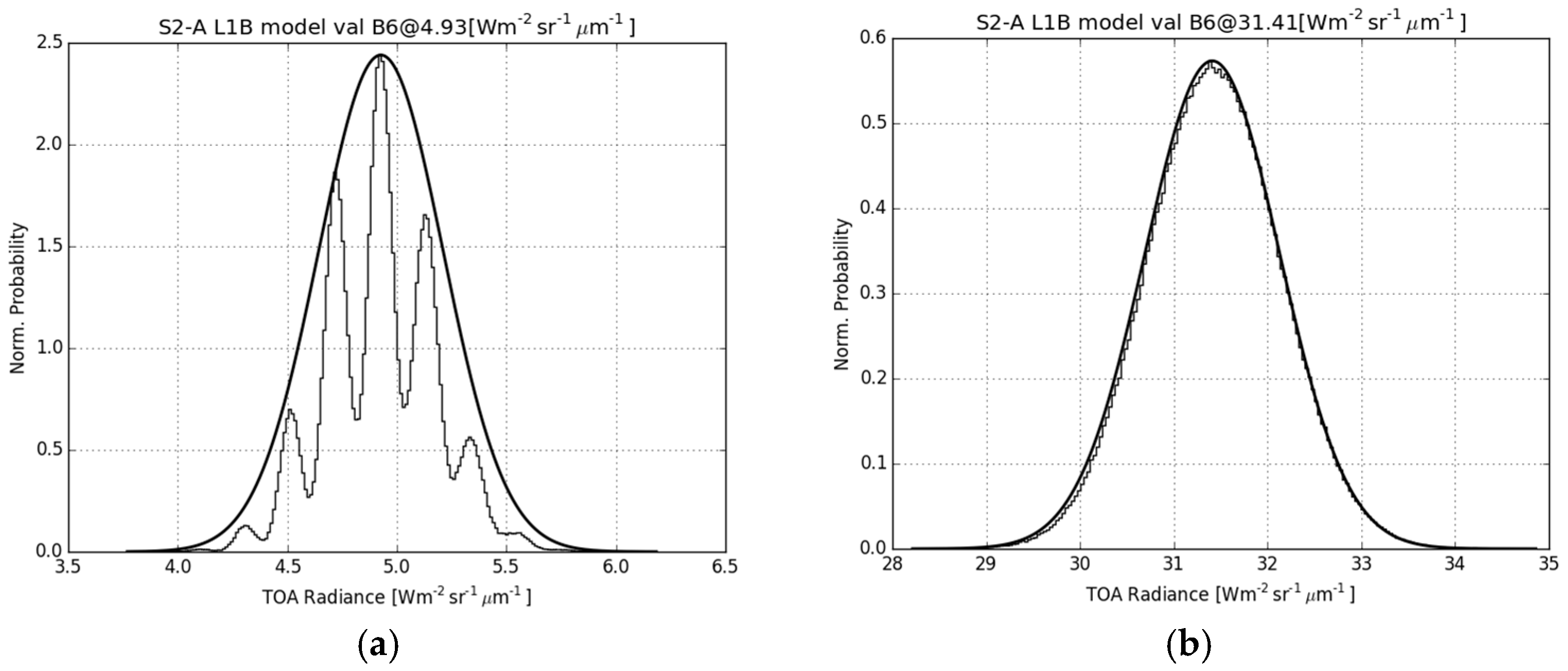
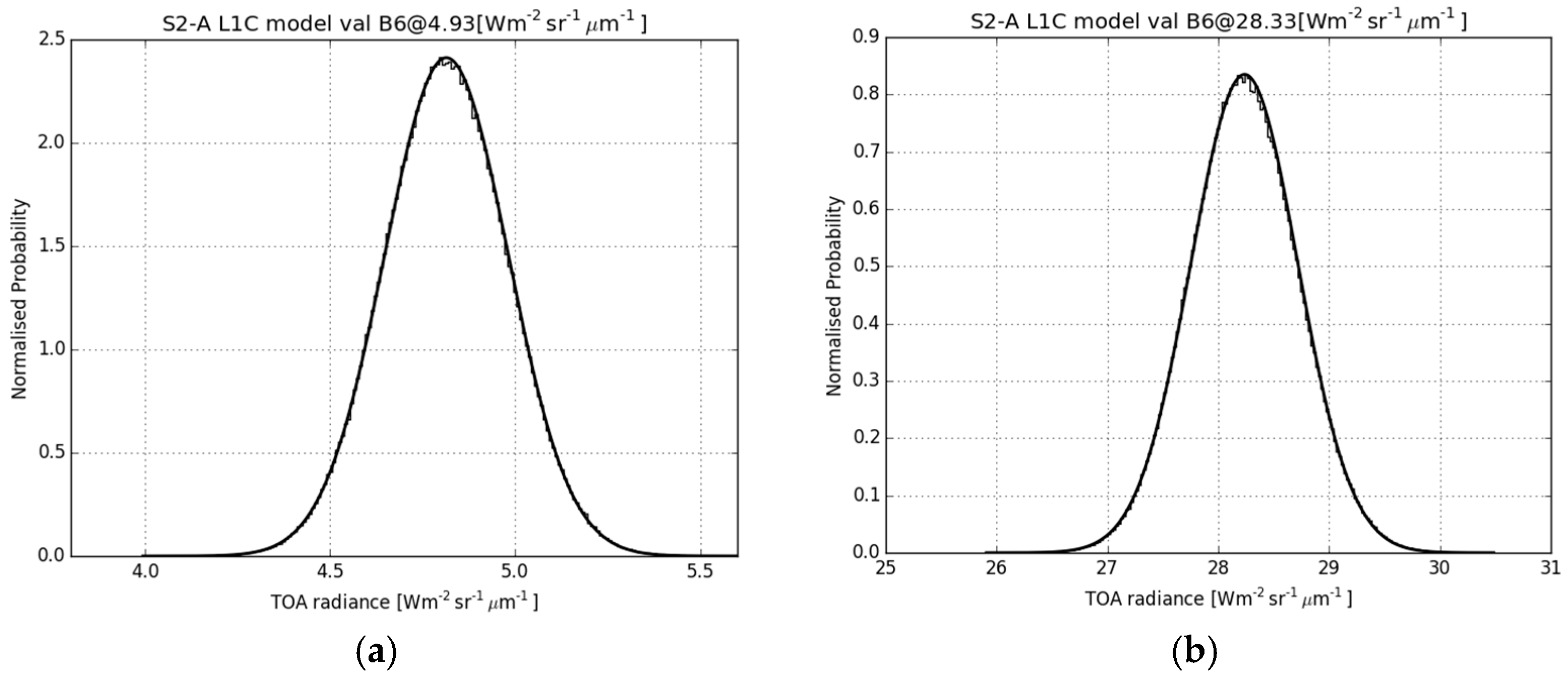
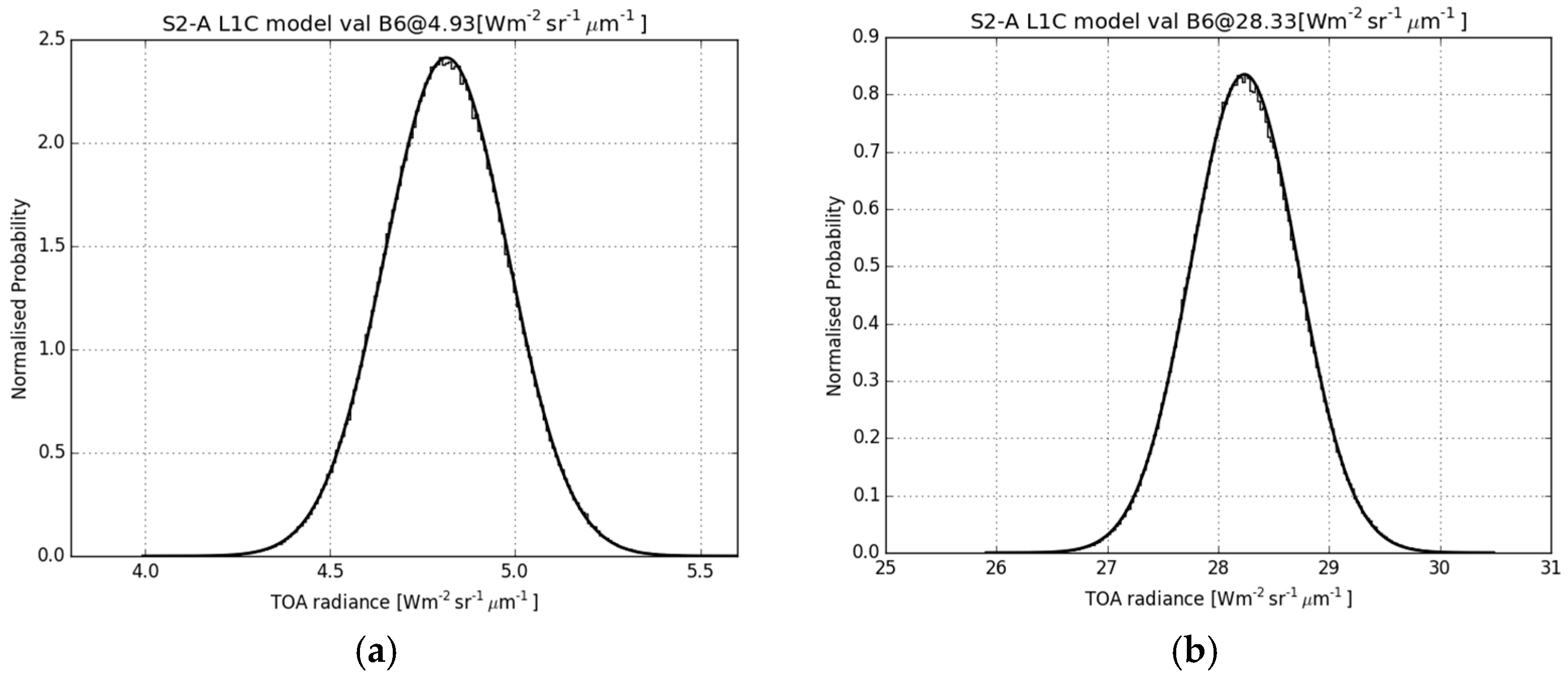
4.5. Validation of the Central Limit Theorem
5. Software Implementation and Integration
5.1. Tool Integration, System Requirements and Performance
- SNAP Python libraries (snappy) for product readout.
- General tool design to accommodate other sensors.
- Maximisation of product info extraction (e.g., noise coefficients) makes it robust against re‑processing, contingencies etc.
- Conservation of the geolocation information for collocation between the L1C reflectance factor and uncertainty images.
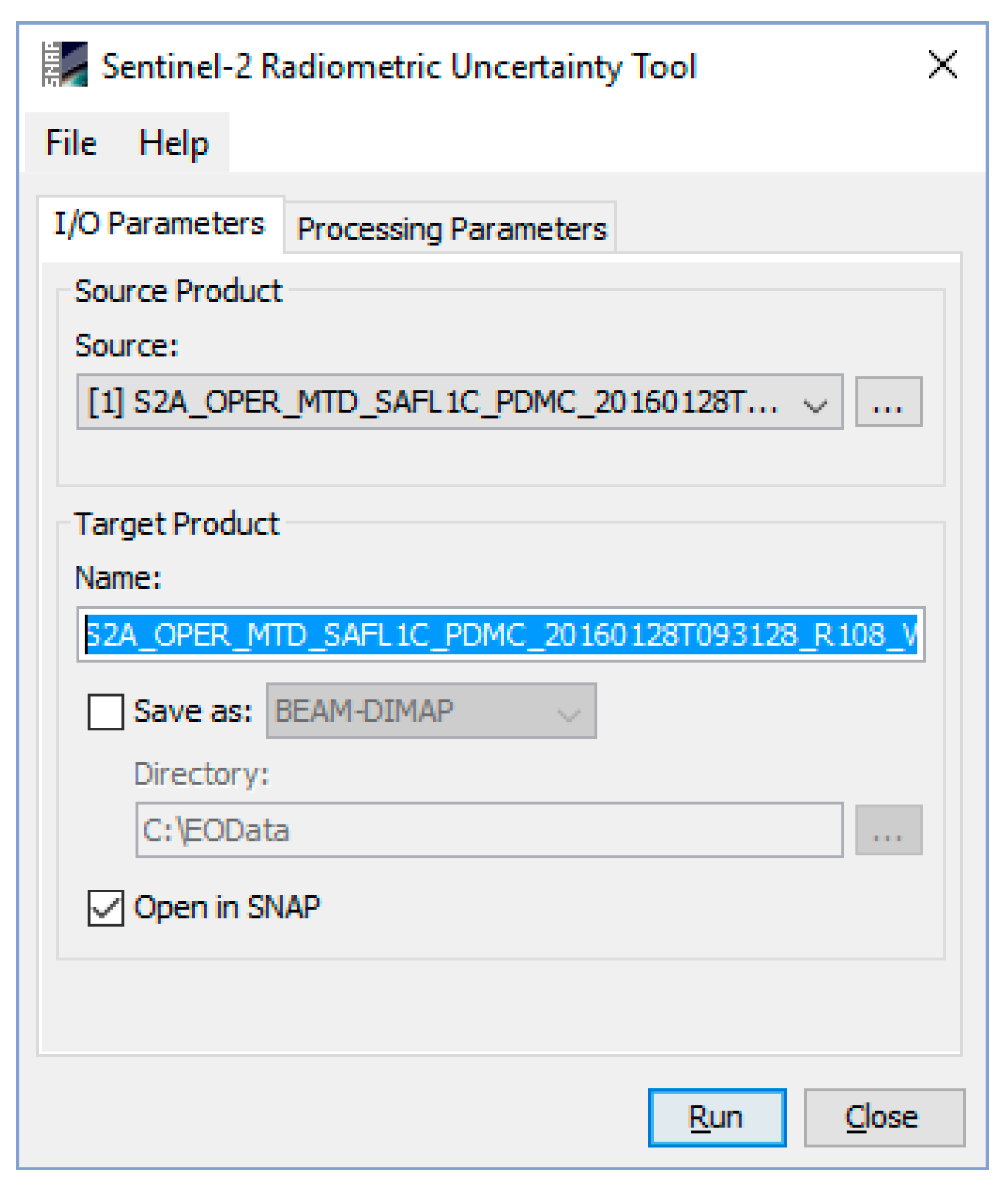
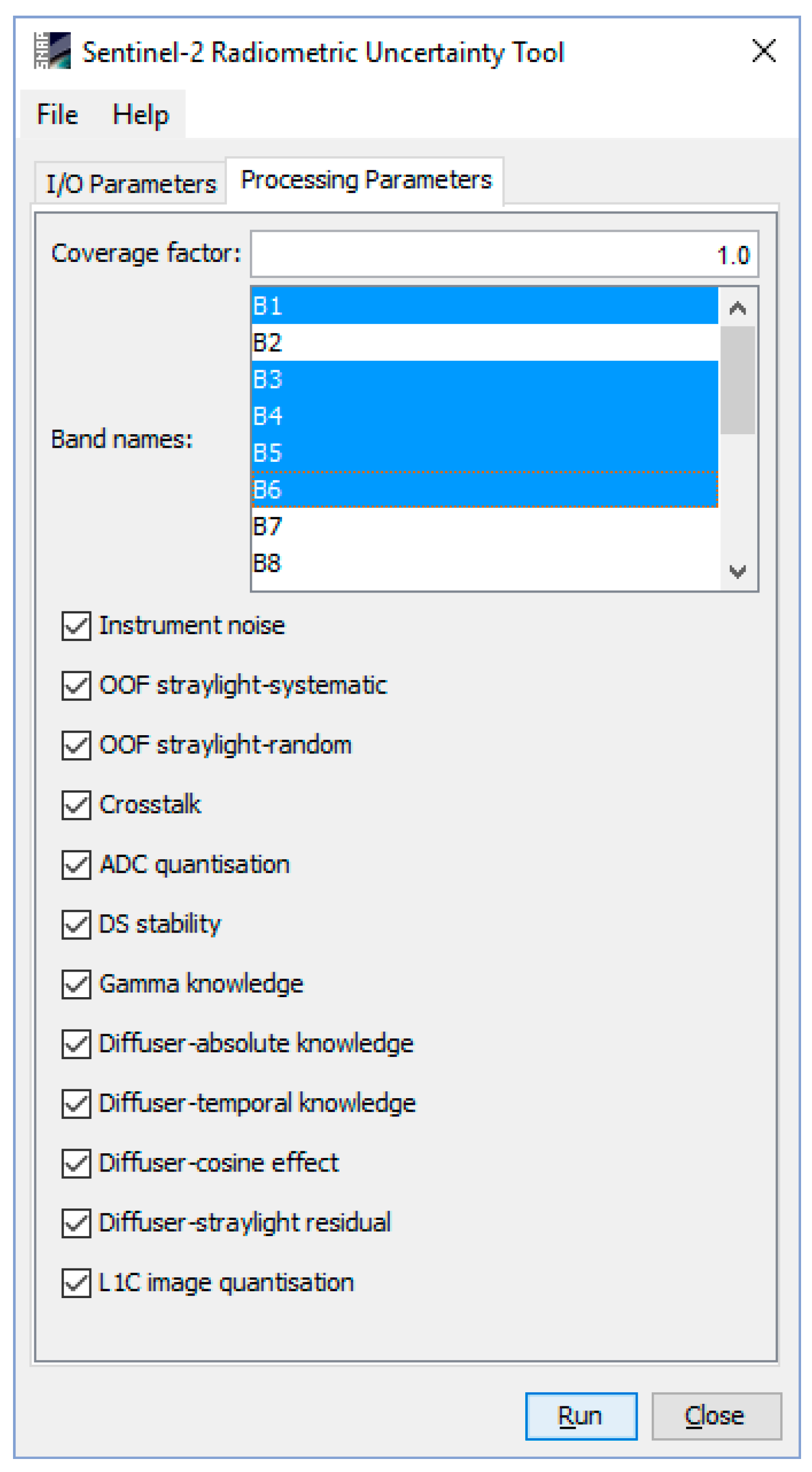
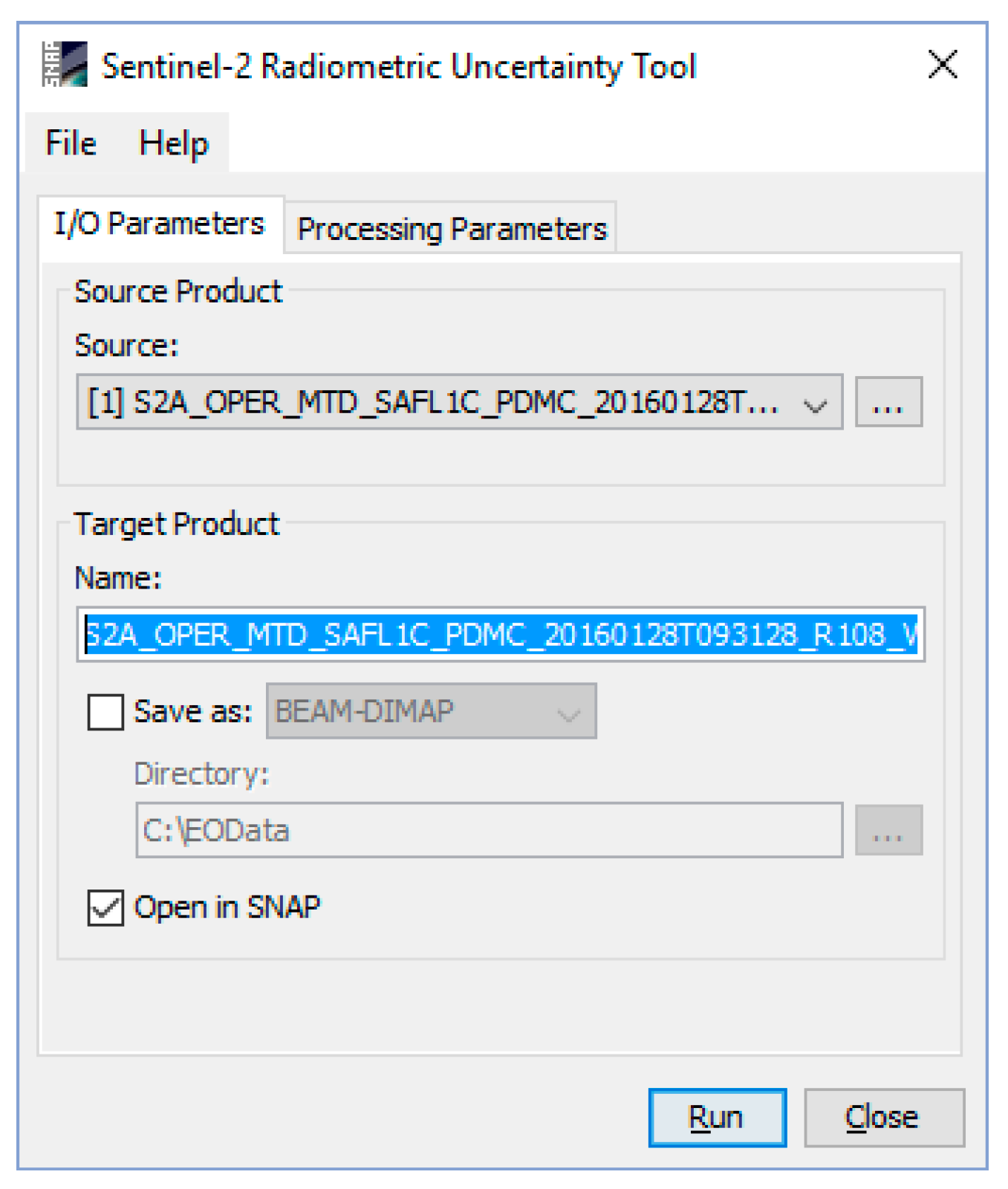
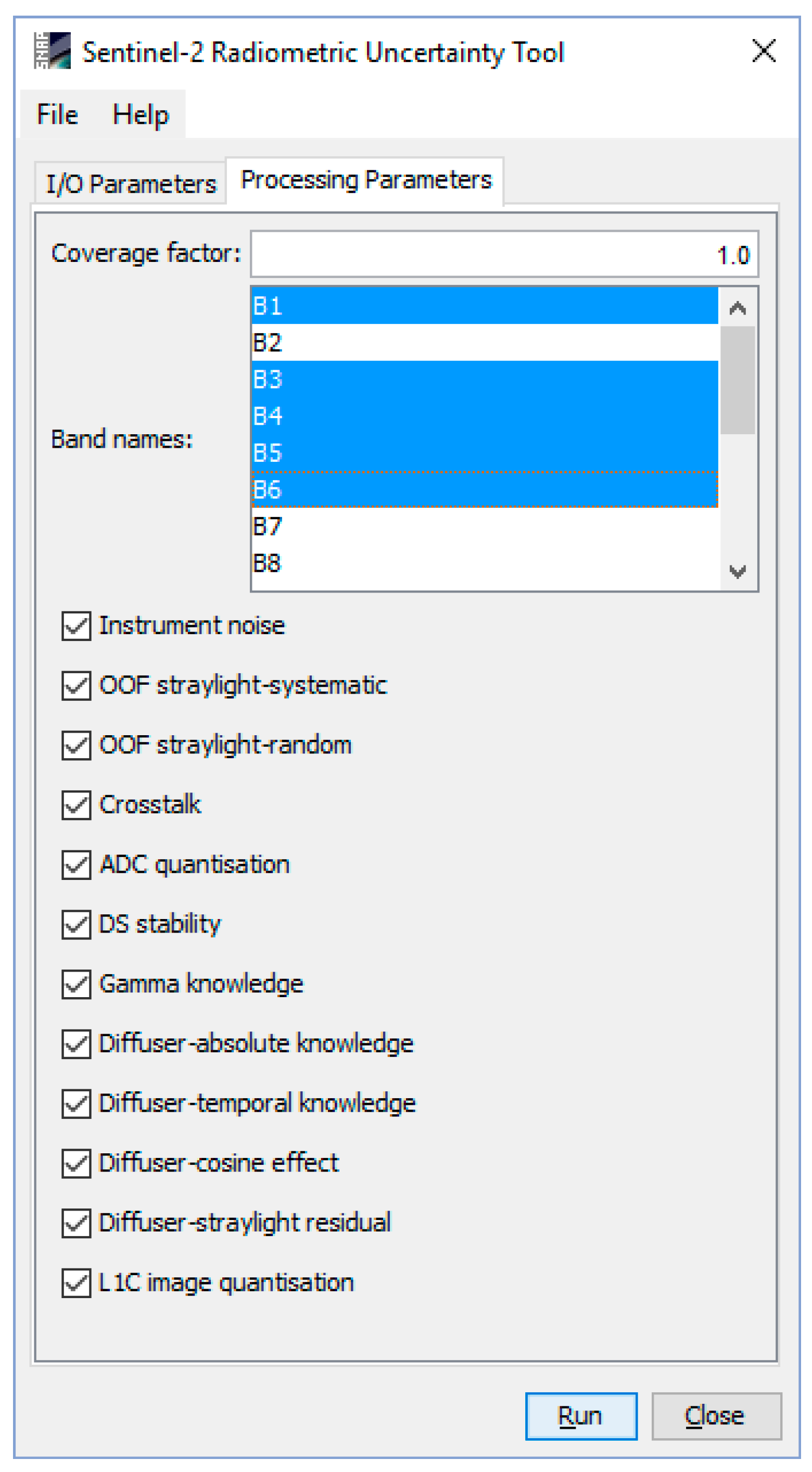
5.2. Processor Documentation
- The option “Coverage factor” permits specifying the k parameter that assigns a probability coverage to the uncertainty evaluation—k = 1 means 68.27% probability [8].
- The selection of “Band names” means the uncertainty shall be computed.
- For uncertainty contribution selection, the tab includes a selection list with the uncertainty contributions included in the S2-RUTv1 (see Table 1). This permits the user the selection and deselection of specific contributions in order to perform sensitivity analysis and separation of random/systematic contributions, etc.
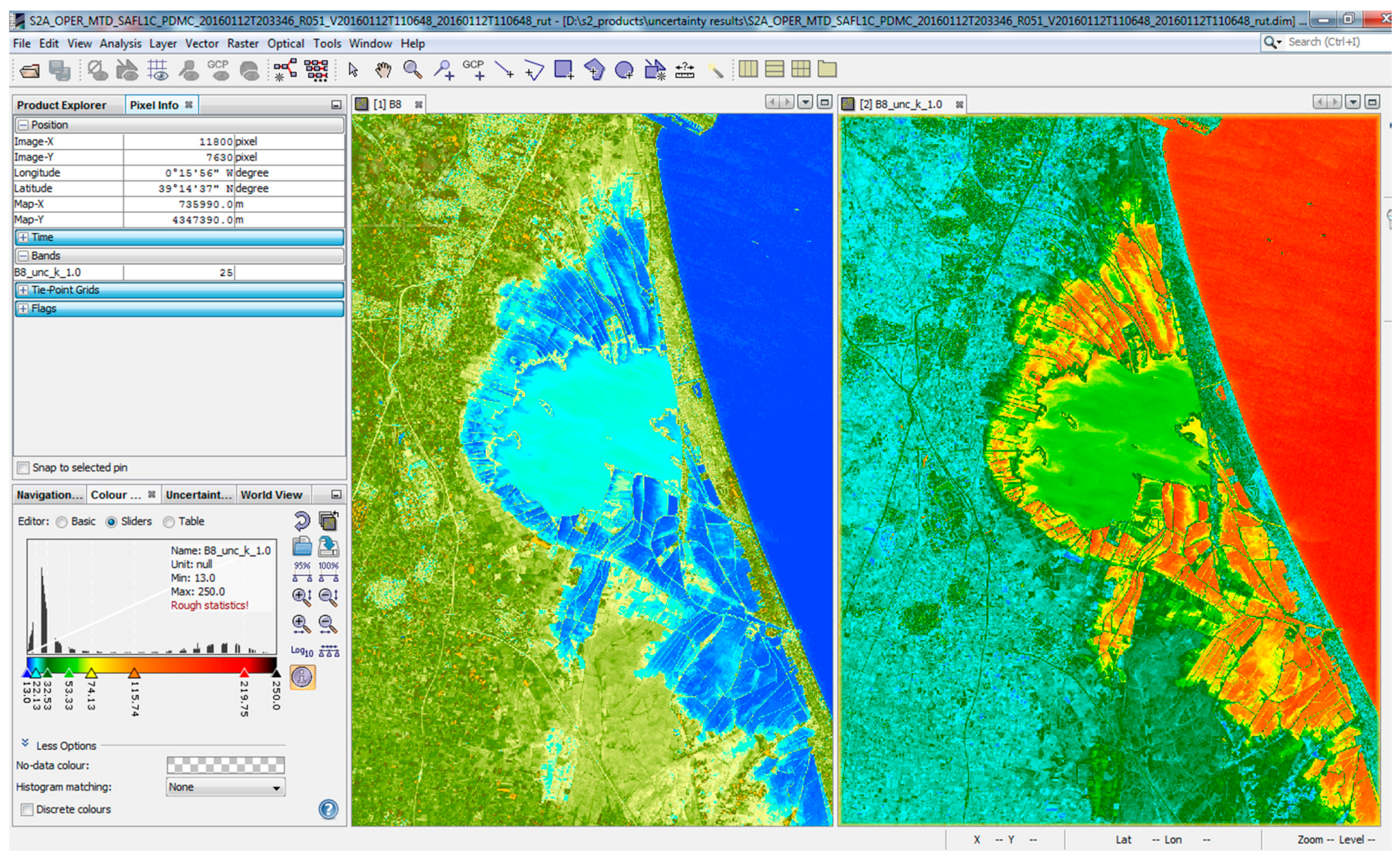
5.3. Output Generation
- 0 == Invalid uncertainty (it cannot be 0 or negative)
- 250 == Uncertainty ≥25%
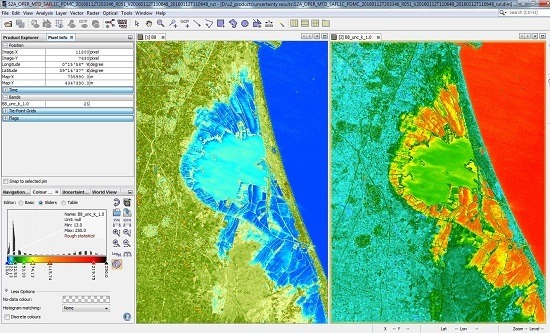
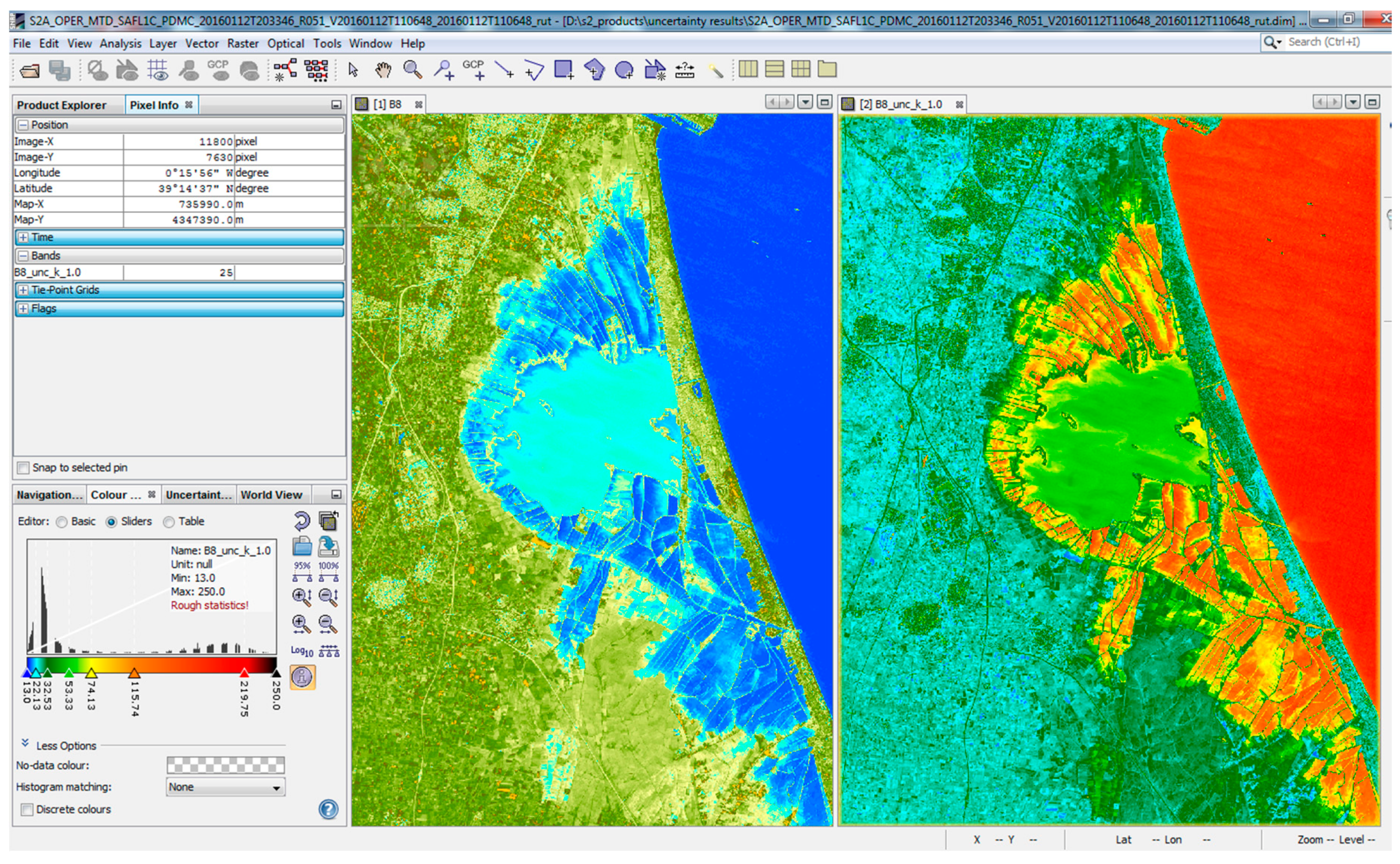
5.4. Radiometric Uncertainty Tool (RUT) Version 1 (v1) Case Study: Albufera Lake, Spain
6. Conclusions and Further Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- QA4EO. A Quality Assurance Framework for Earth Observation: Principles. Available online: http://qa4eo.org/docs/QA4EO_Principles_v4.0.pdf (accessed on 24 January 2017).
- Merchant, C.J.; Embury, O.; Roberts-Jones, J.; Fiedler, E.; Bulgin, C.E.; Corlett, G.K.; Good, S.; McLaren, A.; Rayner, N.; Morak-Bozzo, S.; et al. Sea surface temperature datasets for climate applications from phase 1 of the European Space Agency climate change initiative (SST CCI). Geosci. Data J. 2014, 1, 179–191. [Google Scholar] [CrossRef]
- Gardner, J.L. Uncertainty propagation for NIST visible spectral standards. J. Res. Natl. Inst. Stand. Technol. 2004, 109, 305–318. [Google Scholar] [CrossRef] [PubMed]
- Esposito, J.A.; Xiong, X.; Wu, A.; Sun, J.; Barnes, W.L. MODIS reflective solar bands uncertainty analysis. Proc. SPIE 2004. [Google Scholar] [CrossRef]
- Xiong, X.; Troller, G.; Sun, J.; Wenny, B.; Angal, A.; Barnes, W. MODIS Level 1b Algorithm Theoretical Basis Document; NASA/Goddard Space Flight Center: Greenbelt, MD, USA, 2013.
- Toller, G.N.; Isaacman, A.; Kuyper, J. Modis Level 1b Product User’s Guide; NASA/Goddard Space Flight Center: Greenbelt, MD, USA, 2006.
- Gorroño, J.; Fomferra, N.; Peters, M. Sentinel-2 Radiometric Uncertainty Tool (S2-RUT). Available online: https://github.com/senbox-org/snap-rut (accessed on 24 January 2017).
- JCGM. Guide to the Expression of Uncertainty in Measurement. Available online: http://www.bipm.org/en/publications/guides/gum.html (accessed on 24 January 2017).
- Lefebvre, A.; Sannier, C.; Corpetti, T. Monitoring urban areas with Sentinel-2a data: Application to the update of the copernicus high resolution layer imperviousness degree. Remote Sens. 2016, 8, 606. [Google Scholar] [CrossRef]
- Immitzer, M.; Vuolo, F.; Atzberger, C. First experience with Sentinel-2 data for crop and tree species classifications in central europe. Remote Sens. 2016, 8, 166. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’S optical high-resolution mission for gmes operational services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- ESA (European Space Agency). Snap and the Sentinel Toolboxes. Available online: http://step.esa.int/main/download/ (accessed on 24 January 2017).
- Gascon, F.; Cadau, E.; Colin, O.; Hoersch, B.; Isola, C.; López Fernández, B.; Martimort, P. Copernicus Sentinel-2 mission: Products, algorithms and Cal/Val. Proc. SPIE 2014. [Google Scholar] [CrossRef]
- ESA (European Space Agency). Sentinel-2 MSI Technical Guide. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-2-msi (accessed on 24 January 2017).
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The solar spectral irradiance from 200 to 2400 nm as measured by the solspec spectrometer from the atlas and EURECA missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Gorroño, J.; Gascon, F.; Fox, N.P. Radiometric uncertainty per pixel for the Sentinel-2 L1C products. Proc. SPIE 2015. [Google Scholar] [CrossRef]
- Gorroño, J.; Banks, A.; Gascon, F.; Fox, N.P.; Underwood, C.I. Novel techniques for the analysis of the TOA radiometric uncertainty. Proc. SPIE 2016. [Google Scholar] [CrossRef]
- Barsi, J.; Lee, K.; Kvaran, G.; Markham, B.; Pedelty, J. The spectral response of the Landsat-8 operational land imager. Remote Sens. 2014, 6, 10232. [Google Scholar] [CrossRef]
- Gatti, A.; Bertolini, A. Sentinel-2 Products Specification Document v.14.2. Available online: https://sentinel.esa.int/web/sentinel/document-library/content/-/article/sentinel-2-level-1-to-level-1c-product-specifications (accessed on 24 January 2017).
- Janesick, J.; Pinter, J.; Potter, R.; Elliott, T.; Andrews, J.; Tower, J.; Grygon, M.; Keller, D. Fundamental performance differences between CMOS and CCD imagers, Part IV. Proc. SPIE 2010. [Google Scholar] [CrossRef]
- Arrhenius, S.; Pamphlets, P. Über Die Dissociationswärme und den Einfluss der Temperatur auf den Dissociationsgrad der Elektrolyte; Wilhelm Engelmann: Berlin, Germany, 1889. [Google Scholar]
- Hopkinson, G.R.; Goodman, T.M.; Prince, S.R. A Guide to the Use and Calibration of Detector Array Equipment; SPIE Press: Orlando, FL, USA, 2004. [Google Scholar]
- Dariel, A.; Chorier, P.; Leroy, C.; Maltère, A.; Bourrillon, V.; Terrier, B.; Molina, M.; Martino, F. Development of an SWIR multispectral detector for GMES/Sentinel-2. Proc. SPIE 2009. [Google Scholar] [CrossRef]
- Espuche, S.; Chorvalli, V.; Laborie, A.; Delbru, F.; Thomas, S.; Sagne, J.; Haas, C. VNIR focal plane results from the multispectral instrument of the Sentinel2 mission. In Proceedings of the ICSO 2014 International Conference on Space Optics, Tenerife, Spain, 6–10 October 2014.
- Mazy, E.; Camus, F.; Chorvalli, V.; Domken, I.; Laborie, A.; Marcotte, S.; Stockman, Y. Sentinel-2 diffuser on-ground calibration. Proc. SPIE 2013. [Google Scholar] [CrossRef]
- Rahman, H.; Pinty, B.; Verstraete, M.M. Coupled Surface-Atmosphere Reflectance (CSAR) Model: 2. Semiempirical surface model usable with NOAA advanced very high resolution radiometer data. J. Geophys. Res. Atmos. 1993, 98, 20791–20801. [Google Scholar] [CrossRef]
- Stiegman, A.E.; Bruegge, C.J.; Springsteen, A.W. Ultraviolet stability and contamination analysis of spectralon diffuse reflectance material. Opt. Eng. 1993, 32, 799–804. [Google Scholar] [CrossRef]
- Delwart, S.; Bourg, L. Radiometric calibration of MERIS. Proc. SPIE 2011. [Google Scholar] [CrossRef]
- JCGM. Evaluation of Measurement Data—Supplement 1 to the “Guide to the Expression of Uncertainty in Measurement”—Propagation of Distributions Using a Monte Carlo Method. Available online: http://www.bipm.org/en/publications/guides/gum.html (accessed on 24 January 2017).
- Carbone, P.; Petri, D. Mean value and variance of noisy quantized data. Measurement 1998, 23, 131–144. [Google Scholar] [CrossRef]
- Clarke, B.D.; Allen, C.; Bryson, S.T.; Caldwell, D.A.; Chandrasekaran, H.; Cote, M.T.; Girouard, F.; Jenkins, J.M.; Klaus, T.C.; Li, J.; et al. A framework for propagation of uncertainties in the Kepler data analysis pipeline. Proc. SPIE 2010. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L1B Contributor | Parameter | S2-RUTv1 | L1C Contributor | Parameter | S2-RUTv1 |
|---|---|---|---|---|---|
| Instrument noise, unoise | X(p,l,b,d) | Y | Diffuser reflectance absolute knowledge, udiff_abs | ρsd(p,θsd(l), (l)) | Y |
| Out-of-field Stray-light—systematic part, ustray_sys | X(p,l,b,d) | Y | Diffuser reflectance temporal knowledge, udiff_temp | ρsd(p,θsd(l), (l)) | Y |
| Out-of-field Stray-light—random part, ustray_rand | X(p,l,b,d) | Y | Angular diffuser knowledge—BRF effect | ρsd(p,θsd(l), (l)) | <0.1% |
| Crosstalk, ux_talk | X(p,l,b,d) | Y | Instrument noise and dark signal during calibration | Ysd(p,l,b,d) | <0.1% |
| Deconvolution residual | X(p,l,b,d) | N | Solar irradiance model | ES(b) | <0.1% |
| Polarisation error | X(p,l,b,d) | N | Angular diffuser knowledge—cosine effect, udiff_cos | cos(θsd(l)) | Y |
| ADC quantisation, uADC | X(p,l,b,d) | Y | Straylight in calibration mode—residual, udiff_k | Kslt | Y |
| Compression noise | X(p,l,b,d) | <0.1% | Sun-to-satellite distance knowledge | d(t) | <0.1% |
| Dark signal knowledge | DS(p,j,b,d) | <0.1% | Angular observation knowledge—cosine effect | cos(θS(i,j)) | <0.1% |
| Dark signal stability, uDS | PCmasked(l,b,d) | Y | Orthorectification uncertainty propagation | ρk(i,j) | N |
| Non-linearity and non-uniformity knowledge, ugamma | γ(p,b,d,Y) | Y | Spectral knowledge | ρk(i,j) | N |
| Non-uniformity spectral residual | γ(p,b,d,Y) | N | Geometric knowledge | ρk(i,j) | N |
| L1B Image quantisation | CNk,NTDI(i,j) | <0.1% | L1C Image quantisation, uref_quant | ρk(i,j) | Y |
| L1B Contributor | Value | Distribution Type |
|---|---|---|
| Instrument noise, unoise | Calculated as in Equation (9). Coefficients α and β extracted from the datastrip metadata [19] | Normal |
| ADC quantisation, uADC | ±0.5 [LSB] | Rectangular |
| Dark signal knowledge | ±0.05 [LSB] | Normal |
| Dark signal stability, uDS | ±0.1 VNIR, ±0.24 B10, ±0.1 B11, ±0.16LSB B12 [LSB] | Rectangular |
| Relative gains accuracy | Extracted from quoted L1C metadata (0.4%) [19] | Normal |
| Diffuser uncertainty | From pre-flight characterisation [25] | Normal |
| Diffuser angle knowledge | ±0.4% | Normal |
| Kslt residual | ±0.3% | Rectangular |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gorroño, J.; Fomferra, N.; Peters, M.; Gascon, F.; Underwood, C.I.; Fox, N.P.; Kirches, G.; Brockmann, C. A Radiometric Uncertainty Tool for the Sentinel 2 Mission. Remote Sens. 2017, 9, 178. https://doi.org/10.3390/rs9020178
Gorroño J, Fomferra N, Peters M, Gascon F, Underwood CI, Fox NP, Kirches G, Brockmann C. A Radiometric Uncertainty Tool for the Sentinel 2 Mission. Remote Sensing. 2017; 9(2):178. https://doi.org/10.3390/rs9020178
Chicago/Turabian StyleGorroño, Javier, Norman Fomferra, Marco Peters, Ferran Gascon, Craig I. Underwood, Nigel P. Fox, Grit Kirches, and Carsten Brockmann. 2017. "A Radiometric Uncertainty Tool for the Sentinel 2 Mission" Remote Sensing 9, no. 2: 178. https://doi.org/10.3390/rs9020178
APA StyleGorroño, J., Fomferra, N., Peters, M., Gascon, F., Underwood, C. I., Fox, N. P., Kirches, G., & Brockmann, C. (2017). A Radiometric Uncertainty Tool for the Sentinel 2 Mission. Remote Sensing, 9(2), 178. https://doi.org/10.3390/rs9020178