
Spaceborne Lightweight and Compact High-Sensitivity Uncooled Infrared Remote Sensing Camera for Wildfire Detection


 and
and
Abstract

1. Introduction
2. Methods
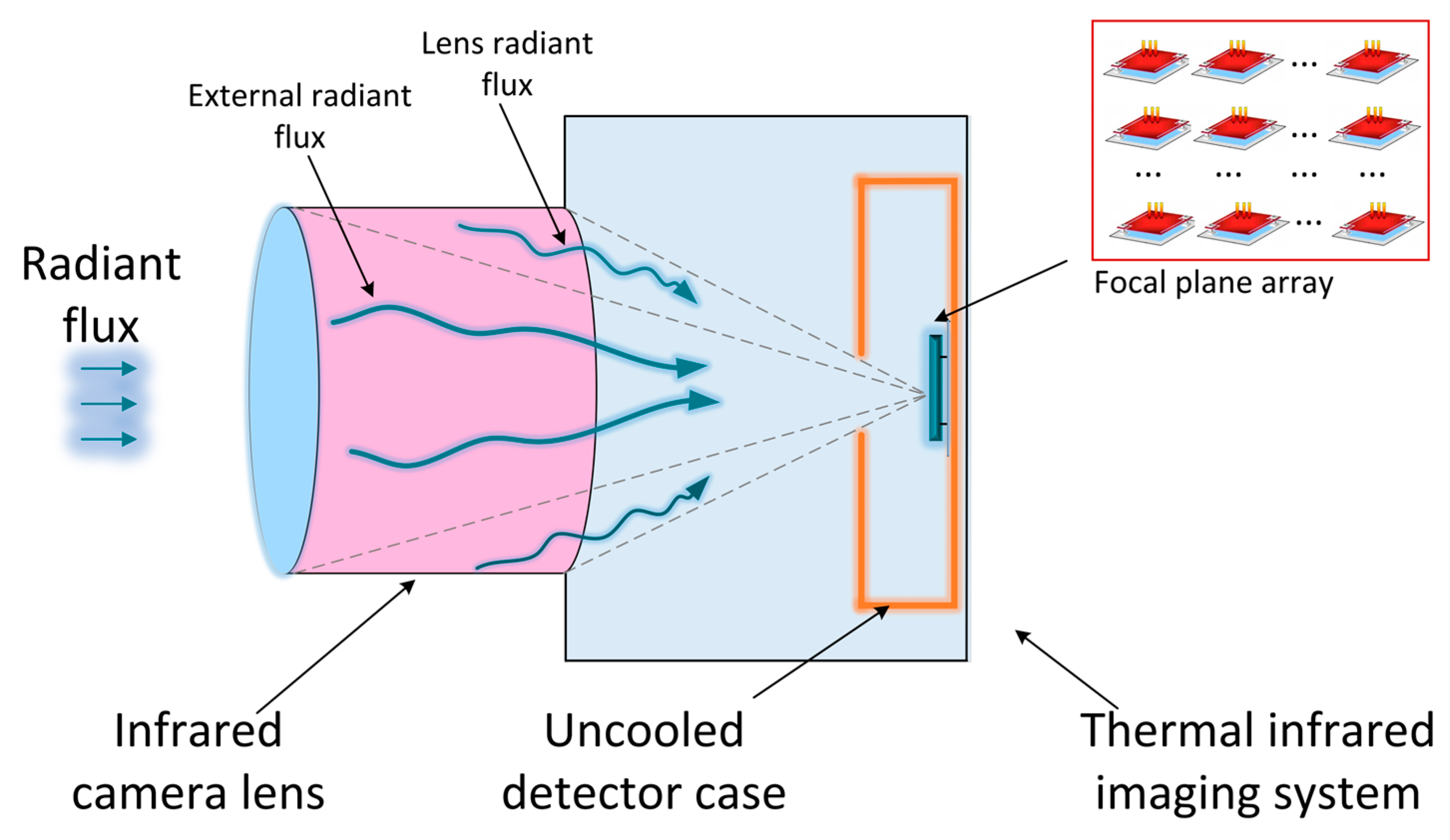
2.1. Thermal Radiation Model
2.2. Camera Imaging Methods
2.3. Increased Sensitivity
- (a)
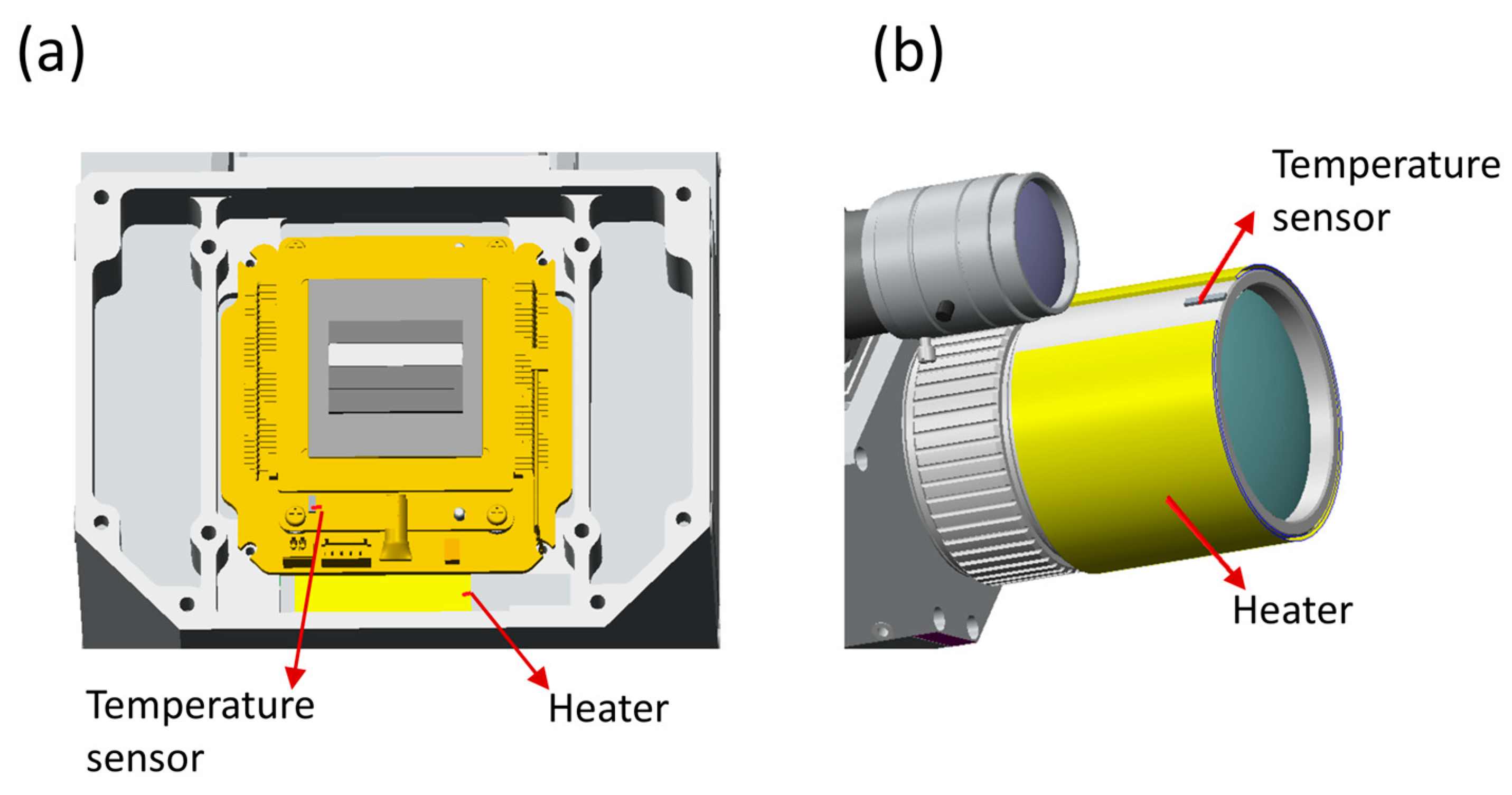
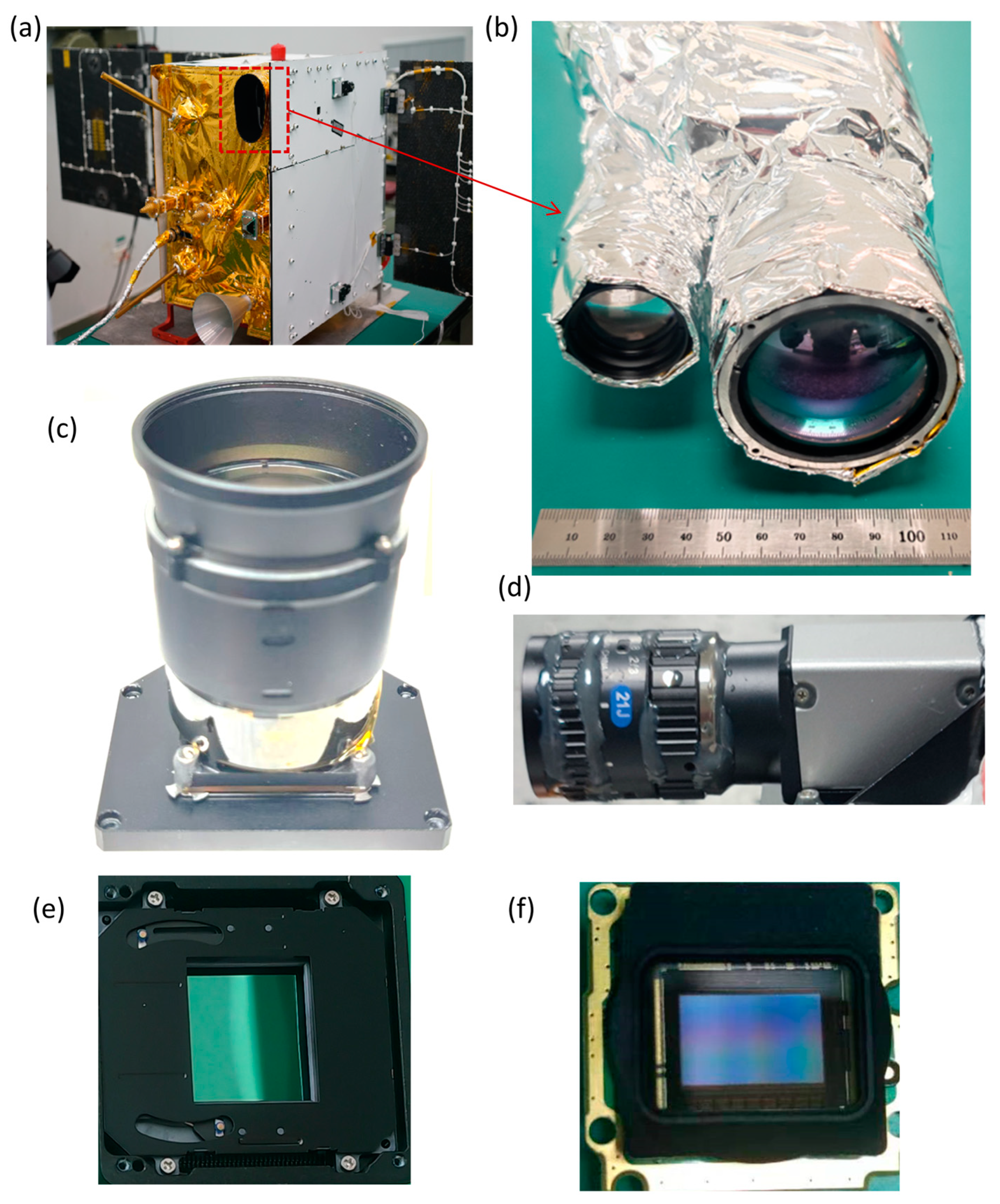
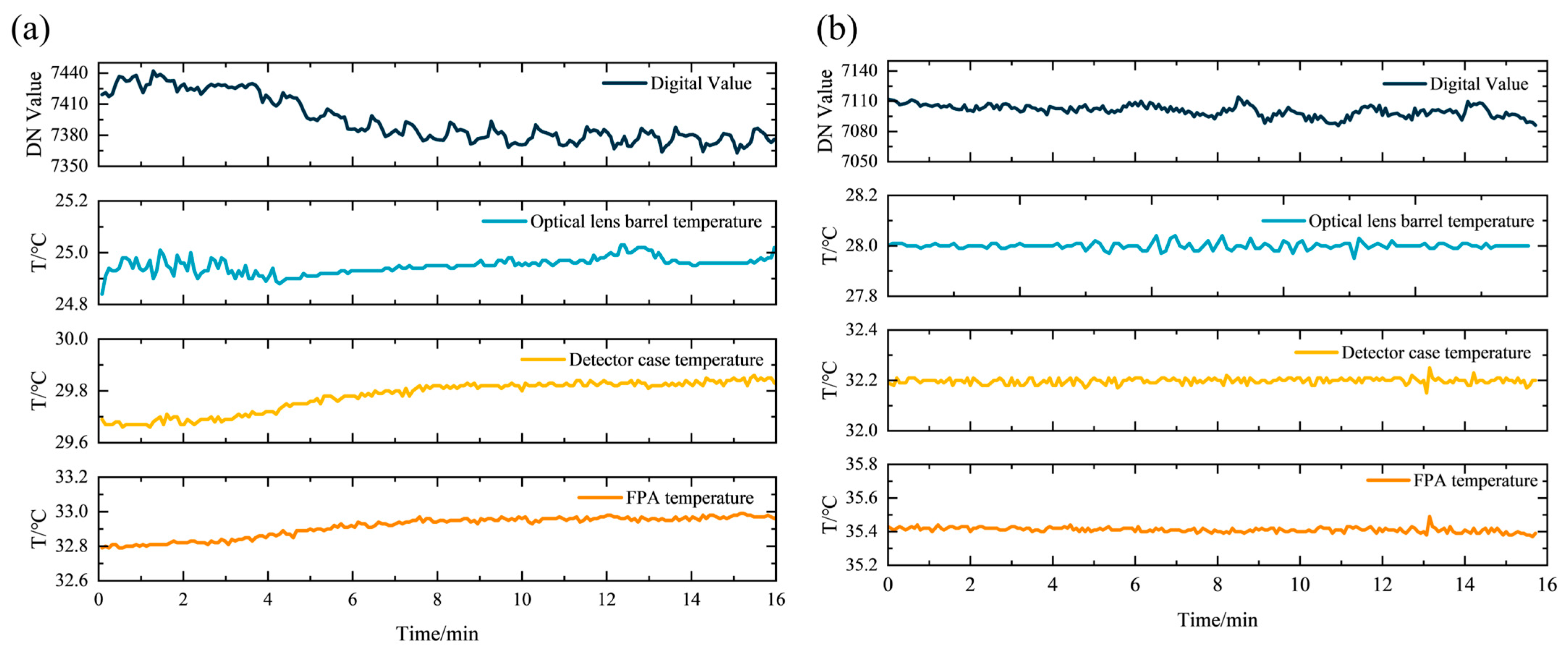
- To reduce noise radiation and minimize temperature fluctuations, the inner wall of the mirror tube was treated with a black anodized coating. This treatment helped lower the radiation parameters, thereby decreasing the heat transfer between the mirror tube’s inner wall and its environment. As a result, the amplitude of the temperature fluctuations was significantly reduced, which contributed to the stability of the mirror tube’s temperature control. To maintain stability in the infrared detector throughout its operation, the detector case (as shown in Figure 3a) was designed to have a heating power of 3 W, while the heating power for the camera optical lens was set at 1.5 W (refer to Figure 3b). The implementation of Proportional–Integral–Derivative (PID) thermal control strategies in the optical pathway and the uncooled detector unit was crucial. These measures stabilized the temperatures of the optical lens and the detector shell structure during the detection and imaging processes. By reducing the impacts of temperature fluctuations and mitigating noise, these strategies enhanced the signal-to-noise ratio (SNR). Overall, incorporating PID thermal control within the optical pathway and the uncooled detector unit ensured that the optical lens and the detector unit maintained stable temperatures, further improving performance during imaging.
- (b)
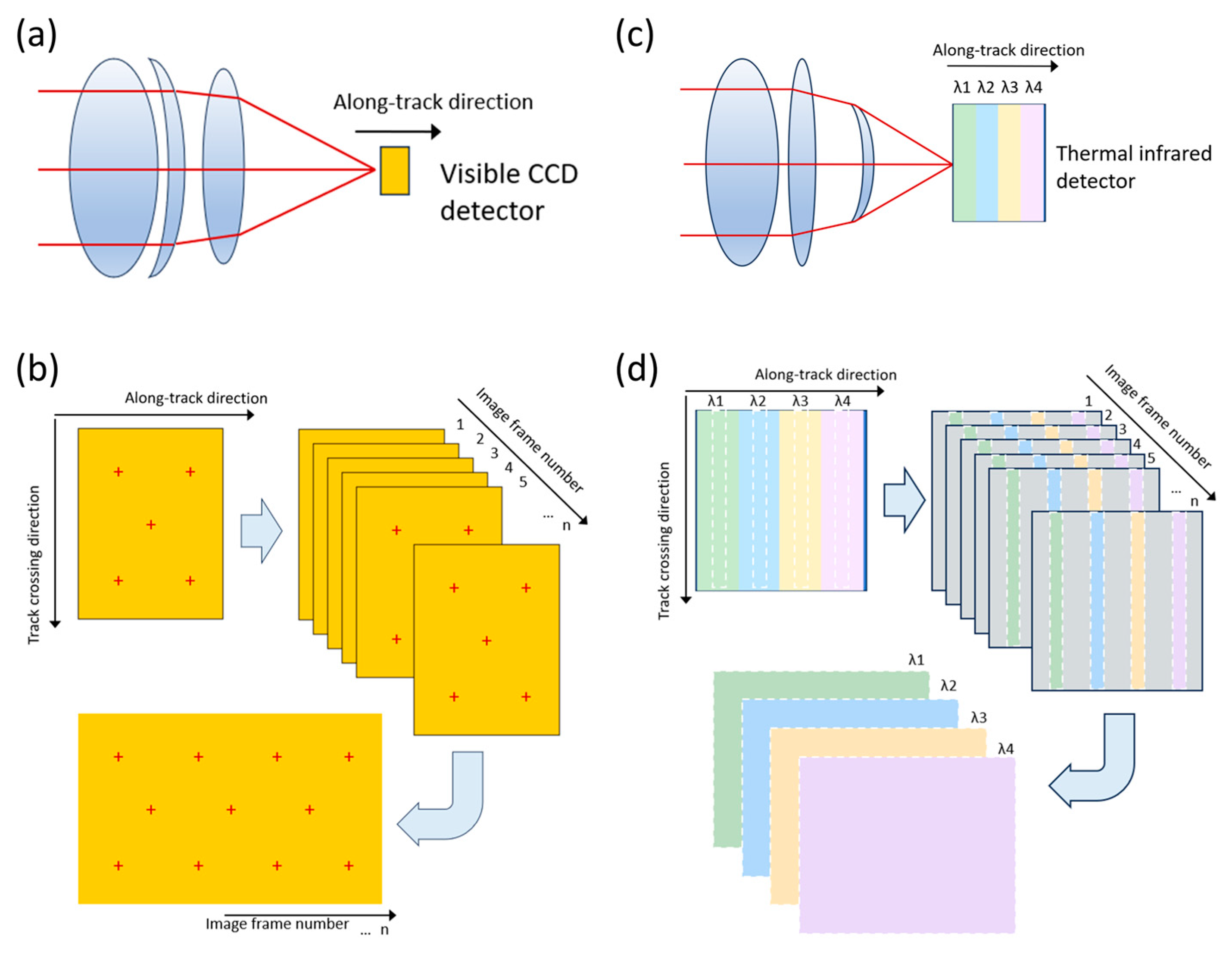
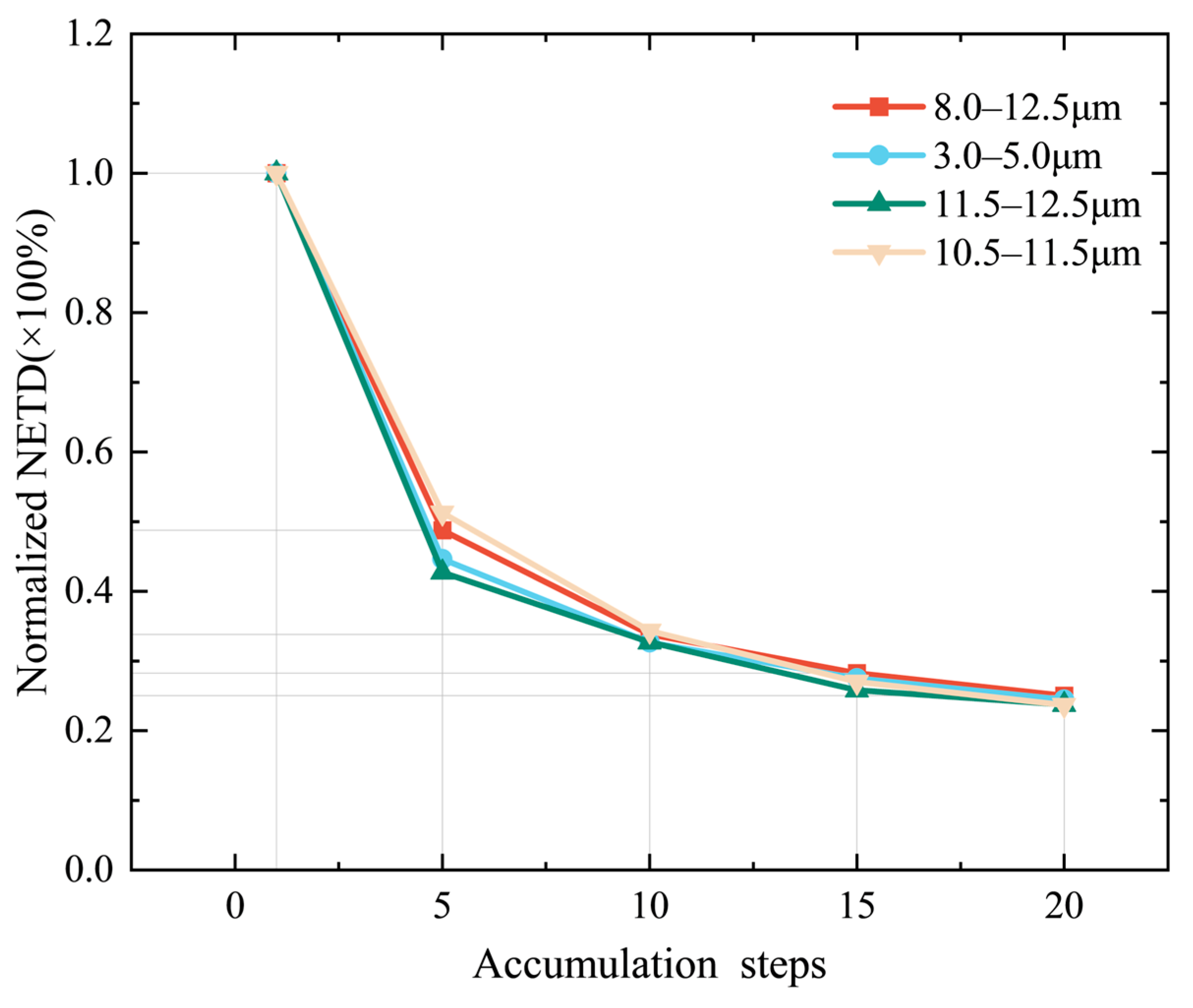
- In the processing of imaging, a spatiotemporal interleaved redundant information multiplexing method was proposed. The method was founded on modern information theory, which posited that the accumulation of optical signals from the same target region could enhance weak signals and mitigate the impact of noise on image quality. Specifically, when the infrared outer array detector advanced the scanning, under the condition of speed–height ratio matching, the images of two adjacent frames were staggered by an integer number of pixels in the direction of advancing the scanning. By utilizing the detector’s different pixels to integrate the imaging of the same scene in a very short period, the pixels corresponding to the same space in the images from different times were accumulated to calculate the mean value. This process reduced the white noise in the detection process by matching the accumulation of information between images from different frames and enhancing the sensitivity of uncooled thermal infrared cameras.
3. Camera Design
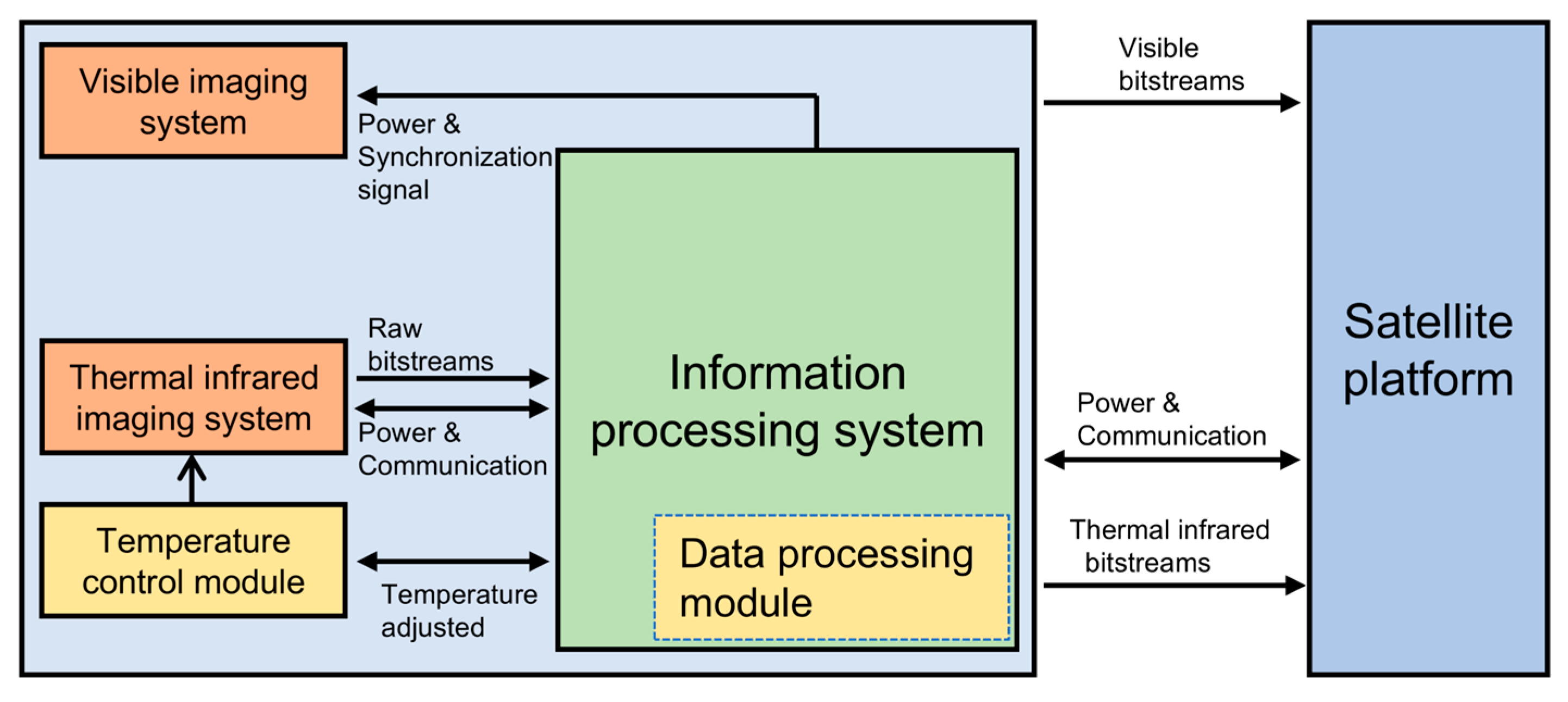
3.1. Camera Architecture
3.2. TIR Imaging System
3.3. VIS Imaging System
3.4. Information Processing System
4. Results
4.1. Camera Sensitivity
4.2. Wildfire Detection
5. Discussion
5.1. Camera Performance
5.2. Some Issues for Wildfire Detection
5.3. The Long-Term Challenge for This Camera
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellites | Terra | Aqua | NPP | Sentinel-3B | HJ-2A/B | Landsat 9 | FY3-G |
|---|---|---|---|---|---|---|---|
| Instrument | MODIS | MODIS | VIIRS | SLSTR | TIRS | TIRS-2 | MERSI-RM |
| Launch year | 1999.12 | 2002.05 | 2011.10 | 2018.04 | 2020.09 | 2021.09 | 2023.04 |
| Wavelength (μm) | 3.6–4.0 8.4–14.3 | 3.6–4.0 8.4–14.3 | 3.66–3.84 3.973–4.128 8.4–8.7 10.263–11.263 11.538–12.488 | 3.55–3.93 10.4–11.3 11.5–12.5 | 3.5–3.9 10.5–11.5 11.5–12.5 | 10.6–11.19 11.5–12.51 | 3.71–3.89 10.3–11.3 11.5–12.5 |
| NETD | 0.25 K@300 K | 0.25 K@300 K | 0.302 K@380 K (MWIR) 0.052 K@300 K (LWIR) | 0.1 K@300 K | 0.5 K@400 K (MWIR) 0.42 K@300 K (LWIR) | 0.08 K@300 K | 0.25 K@400 K (MWIR) 0.1 K@300 K (LWIR) |
| Swath (km) | 2330 | 2330 | 3000 | 1400 | 720 | 185 | 1000 |
| Spatial resolution (m) | 1000 | 1000 | 375/750 | 1000 | 48/96 | 100 | 500 |
| Max weight (kg) | >200 | >200 | 200 | >150 | 142 | 225 | 100 |
| Max power (W) | >150 | >150 | 240 | >150 | 50 | 200 | 100 |
| Detector type | Cooled | Cooled | Cooled | Cooled | Cooled | Cooled | Cooled |
References
- Andreae, M.O. Emission of Trace Gases and Aerosols from Biomass Burning—An Updated Assessment. Atmos. Chem. Phys. 2019, 19, 8523–8546. [Google Scholar] [CrossRef]
- van der Werf, G.R.; Randerson, J.T.; Giglio, L.; van Leeuwen, T.T.; Chen, Y.; Rogers, B.M.; Mu, M.; van Marle, M.J.E.; Morton, D.C.; Collatz, G.J.; et al. Global Fire Emissions Estimates during 1997–2016. Earth Syst. Sci. Data 2017, 9, 697–720. [Google Scholar] [CrossRef]
- Zhou, S. Advanced Infrared Photoelectric Engineering: An Introduction, 1st ed.; Science Press: Beijing, China, 2014; pp. 71–90. [Google Scholar]
- Allison, R.S.; Johnston, J.M.; Craig, G.; Jennings, S. Airborne Optical and Thermal Remote Sensing for Wildfire Detection and Monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef]
- Thornberry, T.D.; Gao, R.-S.; Ciciora, S.J.; Watts, L.A.; McLaughlin, R.J.; Leonardi, A.; Rosenlof, K.H.; Argrow, B.M.; Elston, J.S.; Stachura, M.; et al. A Lightweight Remote Sensing Payload for Wildfire Detection and Fire Radiative Power Measurements. Sensors 2023, 23, 3514. [Google Scholar] [CrossRef] [PubMed]
- Visible Infrared Imaging Radiometer Suite (VIIRS)—LAADS DAAC. Available online: https://ladsweb.modaps.eosdis.nasa.gov/missions-and-measurements/viirs/ (accessed on 15 February 2025).
- Barnes, W.; Xiong, X.; Salomonson, V. Status of Terra MODIS and Aqua MODIS. In Proceedings of the IGARSS 2002: IEEE International Geoscience and Remote Sensing Symposium and 24th Canadian Symposium on Remote Sensing, Vols I-VI, Proceedings: Remote Sensing: Integrating Our View of the Planet, Toronto, ON, Canada, 24–28 June 2002; pp. 970–972. [Google Scholar]
- Oliva, P.; Schroeder, W. Assessment of VIIRS 375 m Active Fire Detection Product for Direct Burned Area Mapping. Remote Sens. Environ. 2015, 160, 144–155. [Google Scholar] [CrossRef]
- Schueler, C.; Clement, J.; Miller, S.; Kealy, P.; Ardanuy, P.; Cota, S.; DeLuccia, F.; Haas, J.; Mango, S.; Speidel, C.; et al. NPOESS VIIRS: Next Generation Polar-Orbiting Atmospheric Imager. Opt. Remote Sens. Atmos. Clouds III 2003, 4891, 50–64. [Google Scholar]
- Lee, T.; Miller, S.; Schueler, C.; Hawkins, J.; Turk, F.; Richardson, K.; Kent, J. NPOESS VIIRS: Dramatically Improved Operational Capability. Appl. Weather. Satell. II 2005, 5658, 1–10. [Google Scholar]
- Csiszar, I.; Schroeder, W.; Giglio, L.; Ellicott, E.; Vadrevu, K.P.; Justice, C.O.; Wind, B. Active Fires from the Suomi NPP Visible Infrared Imaging Radiometer Suite: Product Status and First Evaluation Results. J. Geophys. Res.-Atmos. 2014, 119, 803–816. [Google Scholar] [CrossRef]
- Fukuhara, T.; Kouyama, T.; Kato, S.; Nakamura, R.; Takahashi, Y.; Akiyama, H. Detection of Small Wildfire by Thermal Infrared Camera With the Uncooled Microbolometer Array for 50-Kg Class Satellite. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4314–4324. [Google Scholar] [CrossRef]
- Coppo, P.; Mastrandrea, C.; Stagi, M.; Calamai, L.; Nieke, J. Sea and Land Surface Temperature Radiometer Detection Assembly Design and Performance. J. Appl. Remote Sens. 2014, 8, 084979. [Google Scholar] [CrossRef]
- Ramaseri Chandra, S.N.; Christopherson, J.B.; Casey, K.A.; Lawson, J.; Sampath, A. 2022 Joint Agency Commercial Imagery Evaluation—Remote Sensing Satellite Compendium; Circular: Reston, VA, USA, 2022; p. 298. [Google Scholar]
- HJ-2A/B Successfully Acquires First Batch of Images: Two Payloads from Shanghai Institute of Technical Physics Make New Contributions to China’s Environmental and Disaster Monitoring—Shanghai Institute of Technical Physics, Chinese Academy of Sciences. Available online: http://www.sitp.cas.cn/xwzx/kydt/202011/t20201110_5742938.html (accessed on 10 February 2025).
- Details for Instrument IRMSS-2 (HJ). Available online: https://space.oscar.wmo.int/instruments/view/irmss_2_hj (accessed on 10 February 2025).
- Masek, J.G.; Wulder, M.A.; Markham, B.; McCorkel, J.; Crawford, C.J.; Storey, J.; Jenstrom, D.T. Landsat 9: Empowering Open Science and Applications through Continuity. Remote Sens. Environ. 2020, 248, 111968. [Google Scholar] [CrossRef]
- Montanaro, M.; McCorkel, J.; Tveekrem, J.; Stauder, J.; Mentzell, E.; Lunsford, A.; Hair, J.; Reuter, D. Landsat 9 Thermal Infrared Sensor 2 (TIRS-2) Stray Light Mitigation and Assessment. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5002408. [Google Scholar] [CrossRef]
- Introduction to MERSI-RM Instrument. Available online: https://www.nsmc.org.cn/nsmc/cn/instrument/MERSI-RM.html (accessed on 8 February 2025).
- Kimata, M. Uncooled Infrared Focal Plane Arrays. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 4–12. [Google Scholar] [CrossRef]
- Xie, X.L.; Zhu, X.X.; Zhu, J.C.; Shen, W.M. Analysis and Suppression of Stray Radiation in Uncooled Thermal Infrared Imaging Spectrometer. ACTA Opt. Sin. 2022, 42, 104–110. [Google Scholar]
- On-Orbit Verification Successful! A Non-Cooled Infrared Imaging System Co-Developed by Hangzhou Institute for Advanced Study Demonstrates World-Leading Comprehensive Performance. Available online: https://mp.weixin.qq.com/s/_ASP6bQUrQ15QnHGMiL-hQ?from=singlemessage&scene=1&subscene=10000&clicktime=1719279106&enterid=1719279106&sessionid=0&ascene=1&fasttmpl_type=0&fasttmpl_fullversion=7261029-zh_CN-zip&fasttmpl_flag=0&realreporttime=1719279106041 (accessed on 22 June 2024).
- Wang, J.; Wang, Y.; Li, C. Noise model of hyperspectral imaging system and influence on radiation sensitivity. J. Remote Sens. 2010, 14, 607–620. [Google Scholar]
- Roberts, G.; Wooster, M.; Perry, G.; Drake, N.; Rebelo, L.; Dipotso, F. Retrieval of Biomass Combustion Rates and Totals from Fire Radiative Power Observations: Application to Southern Africa Using Geostationary SEVIRI Imagery. J. Geophys. Res.-Atmos. 2005, 110. [Google Scholar] [CrossRef]
- Maffei, C.; Menenti, M. Predicting Forest Fires Burned Area and Rate of Spread from Pre-Fire Multispectral Satellite Measurements. ISPRS J. Photogramm. Remote Sens. 2019, 158, 263–278. [Google Scholar] [CrossRef]
- Title Death Toll of Los Angeles Wildfires Rises to 16, California Deploys More Resources for Rescue_News Channel_CCTV.com. Available online: https://news.cctv.com/2025/01/12/ARTIHYubv4eV1pw6BMaxEZiK250112.shtml (accessed on 12 January 2025).
- Oloomi, H.M.; Alam, M.S.; Rana, M.M. Noise Performance Evaluation of Uncooled Infrared Detectors (June 2009). IEEE Sens. J. 2011, 11, 971–987. [Google Scholar] [CrossRef]
- Zheng, W.; Chen, J.; Liu, C.; Shan, T.; Yan, H. Study of the Application of FY-3D/MERSI-II Far-Infrared Data in Wildfire Monitoring. Remote Sens. 2023, 15, 4228. [Google Scholar] [CrossRef]
- Chen, X.; Liu, L.; Li, J.; Ou, W.; Zhang, Y. Applications and Research Progress in Satellite Remote Sensing for Fire Detection. Remote Sens. 2020, 24, 531–542. [Google Scholar]
- Peterson, D.; Wang, J.; Ichoku, C.; Hyer, E.; Ambrosia, V. A Sub-Pixel-Based Calculation of Fire Radiative Power from MODIS Observations: 1 Algorithm Development and Initial Assessment. Remote Sens. Environ. 2013, 129, 262–279. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, J.; Ma, J.; Wang, Y.; Liu, S.; Ding, L.; Tang, W.; Pakezhamu, N.; Meng, L. Removing Temperature Drift and Temporal Variation in Thermal Infrared Images of a UAV Uncooled Thermal Infrared Imager. ISPRS J. Photogramm. Remote Sens. 2023, 203, 392–411. [Google Scholar] [CrossRef]
- Aragon, B.; Johansen, K.; Parkes, S.; Malbeteau, Y.; Al-Mashharawi, S.; Al-Amoudi, T.; Andrade, C.F.; Turner, D.; Lucieer, A.; McCabe, M.F. A Calibration Procedure for Field and UAV-Based Uncooled Thermal Infrared Instruments. Sensors 2020, 20, 3316. [Google Scholar] [CrossRef]
- Vampola, A. The Hazardous Space Particle Environment. IEEE Trans. Plasma Sci. 2000, 28, 1831–1839. [Google Scholar] [CrossRef]


| Parameter | Value |
|---|---|
| Imaging mode | Push-broom Imaging |
| Wavelength | Visible band: 400–700 nm Band 1: 8.0–12.5 μm Band 2: 3.0–5.0 μm Band 3: 11.5–12.5 μm Band 4: 10.5–11.5 μm |
| F-number | VIS imaging system: 2.5 TIR imaging system: 1.0 |
| NETD | Band 1: 0.02 K@300 K Band 2: 0.12 K@400 K Band 3: 0.15 K@300 K Band 4: 0.18 K@300 K |
| Modulation Transfer Function | ≥0.15 |
| Spatial resolution | VIS band: 60 m@500 km TIR bands: 120 m@500 km |
| Swath | 150 km@500 km |
| Field of View (FOV) | VIS imaging system: 12.68° × 8.0° TIR imaging system: 17.1° × 13.8° |
| Operational temperature range | 5–25 °C |
| Imaging frame rate | VIS band: 10 Hz TIR bands: 21.11 Hz |
| Approximate power consumption | Standby Mode: 3.5 W Preparation Mode: 14 W Imaging Mode: 10 W |
| Instrument weight | 1.33 kg |
| Dimension | 85 mm × 100 mm × 171 mm |
| Parameter | TIR Detector | VIS Detector |
|---|---|---|
| Sensor | VOx uncooled microbolometer | 1/1.2″CMOS |
| Wavelength | 3–14 μm | 400–700 nm |
| Pixel size | 12 μm | 5.86 μm |
| Active pixels | 1280 × 1024 | 1920 × 1200 |
| NETD or SNR | <50 mK@300 K | >38 dB |
| Thermal time constant | <10 ms | / |
| Frame rate | 30 Hz | 30 Hz |
| Quantization | 14 bits | 8/10/12 bits |
| Dimension | 41 mm × 31.5 mm × 8.31 mm | 29 mm × 29 mm × 42 mm |
| Weight | ≤50 g | 88 g |
| Condition | Optical Lens Barrel Temperature | Detector Case Temperature | FPA Temperature | System Noise |
|---|---|---|---|---|
| /K | ||||
| No precision temperature control | 0.03 | 0.06 | 0.06 | 22.07 |
| Precision temperature control | 0.01 | 0.01 | 0.01 | 5.62 |
| Lifting ratio | 2.85 | 5.05 | 4.15 | 3.92 |
| Accumulation Steps | 1 | 5 | 10 | 15 | 20 |
|---|---|---|---|---|---|
| NETD (mK) | |||||
| Band1 8.0–12.5 μm @300 K | 62 | 30 | 21 | 18 | 16 |
| Band2 3.0–5.0 μm @400 K | 371 | 165 | 121 | 102 | 91 |
| Band3 11.5–12.5 μm @300 K | 462 | 197 | 151 | 119 | 110 |
| Band4 10.5–11.5 μm @300 K | 533 | 273 | 183 | 144 | 126 |
| Wildfire Temperature (°C) | NETD (mK) | |||
|---|---|---|---|---|
| 8–12.5 μm | 3–5 μm | 11.5–12.5 μm | 10.5–11.5 μm | |
| 200 | 5.3 | 72.5 | 38.1 | 46.2 |
| 400 | 1.8 | 25.1 | 13.2 | 16.0 |
| 600 | 0.8 | 11.6 | 6.1 | 7.4 |
| 800 | 0.4 | 6.2 | 3.3 | 4.0 |
| 1000 | 0.2 | 3.7 | 2.0 | 2.4 |
(m) | (m) | (m) | (m) | (m) | (m) |
|---|---|---|---|---|---|
| 120 | ±60 | ±60 | ±60 | ±120 | ±158.75 |
| 60 | ±30 | ±30 | ±30 | ±60 | ±79.37 |
| 30 | ±15 | ±15 | ±15 | ±30 | ±39.69 |
| 15 | ±7.5 | ±7.5 | ±7.5 | ±15 | ±19.84 |
| Parameter | Condition |
|---|---|
| Time | Satellite pass: 21:38:04–21:38:22 |
| Burning area | 10 m × 10 m |
| Effective area | 100 m2 |
| Location | 127.21°E, 45.61°N |
| Elevation | 250.43 m |
| Combustibles | Corn straw |
| Radiation Source | Name of Sites | Location |
|---|---|---|
| Wildfire | Leman Bay, Australia | 135.34°E, 14.77°S |
| Oil well flare stack | Basra Province, Iraq | 47.56°E, 30.23°N |
| Volcano | Mount Etna, Italy | 15.00°E, 37.75°N |
| Fire point | Harbin City, China | 127.21°E, 45.61°N |
| Wildfire | Eaton Canyon, USA | 118.13°W, 34.17°N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, F.; Tang, G.; Zhang, T.; Wu, W.; Zhao, B.; Miao, J.; Li, D.; Liu, X.; Wang, J.; Li, C. Spaceborne Lightweight and Compact High-Sensitivity Uncooled Infrared Remote Sensing Camera for Wildfire Detection. Remote Sens. 2025, 17, 1387. https://doi.org/10.3390/rs17081387
Ding F, Tang G, Zhang T, Wu W, Zhao B, Miao J, Li D, Liu X, Wang J, Li C. Spaceborne Lightweight and Compact High-Sensitivity Uncooled Infrared Remote Sensing Camera for Wildfire Detection. Remote Sensing. 2025; 17(8):1387. https://doi.org/10.3390/rs17081387
Chicago/Turabian StyleDing, Fang, Guoliang Tang, Tongxu Zhang, Wenli Wu, Bangjian Zhao, Jingwen Miao, Dunping Li, Xu Liu, Jianyu Wang, and Chunlai Li. 2025. "Spaceborne Lightweight and Compact High-Sensitivity Uncooled Infrared Remote Sensing Camera for Wildfire Detection" Remote Sensing 17, no. 8: 1387. https://doi.org/10.3390/rs17081387
APA StyleDing, F., Tang, G., Zhang, T., Wu, W., Zhao, B., Miao, J., Li, D., Liu, X., Wang, J., & Li, C. (2025). Spaceborne Lightweight and Compact High-Sensitivity Uncooled Infrared Remote Sensing Camera for Wildfire Detection. Remote Sensing, 17(8), 1387. https://doi.org/10.3390/rs17081387