
Flood Inundation Mapping Using the Google Earth Engine and HEC-RAS Under Land Use/Land Cover and Climate Changes in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia



Abstract
1. Introduction
2. Materials and Methods
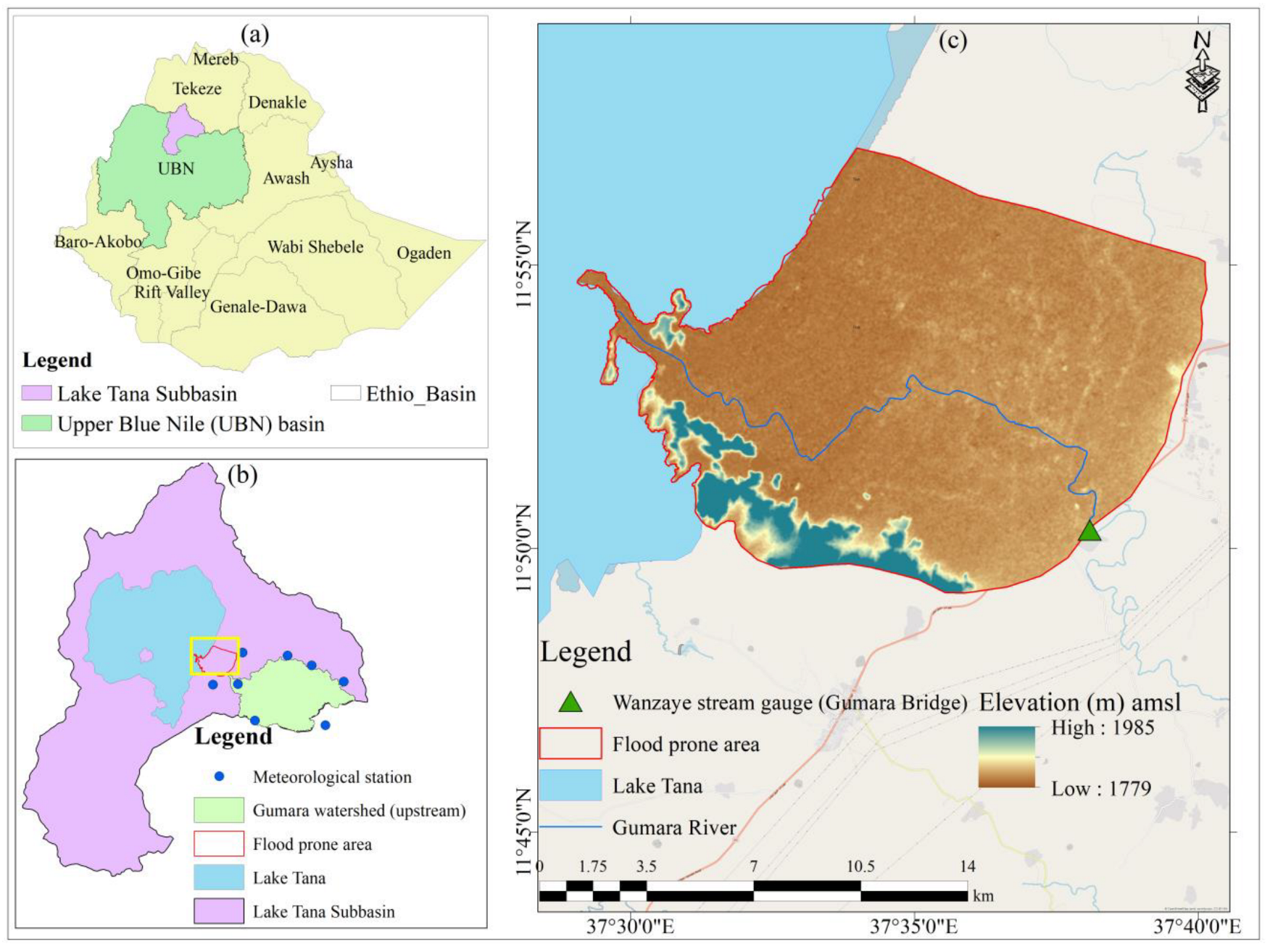
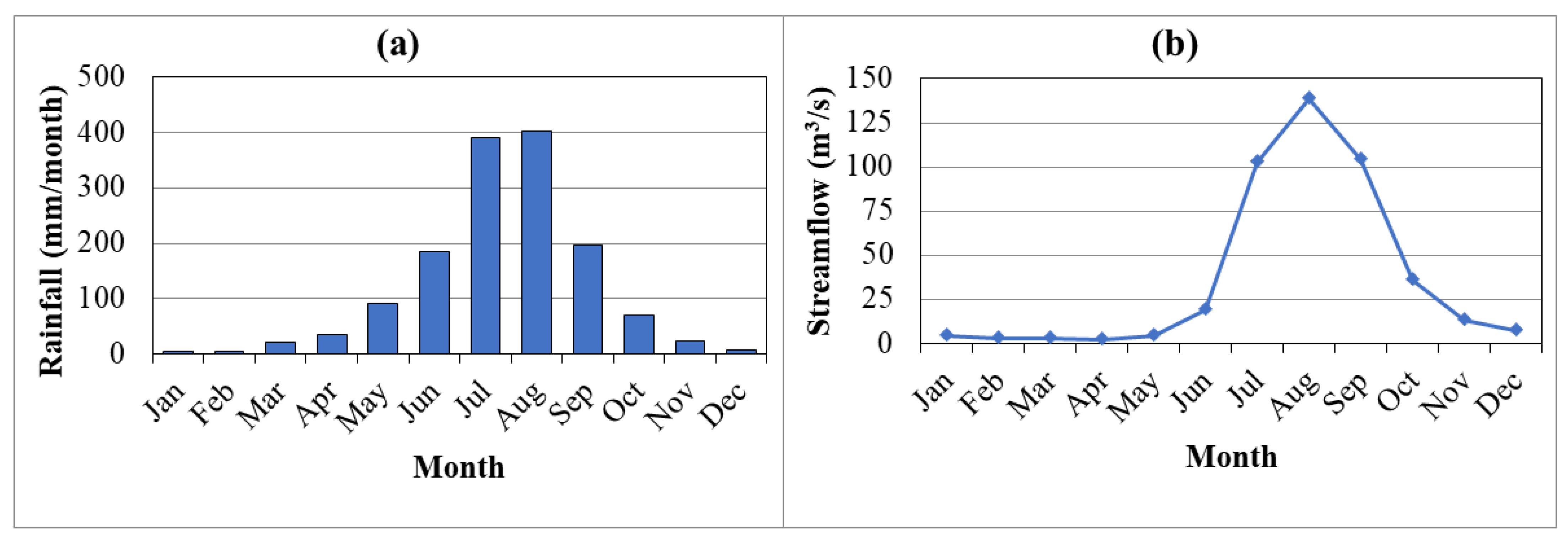
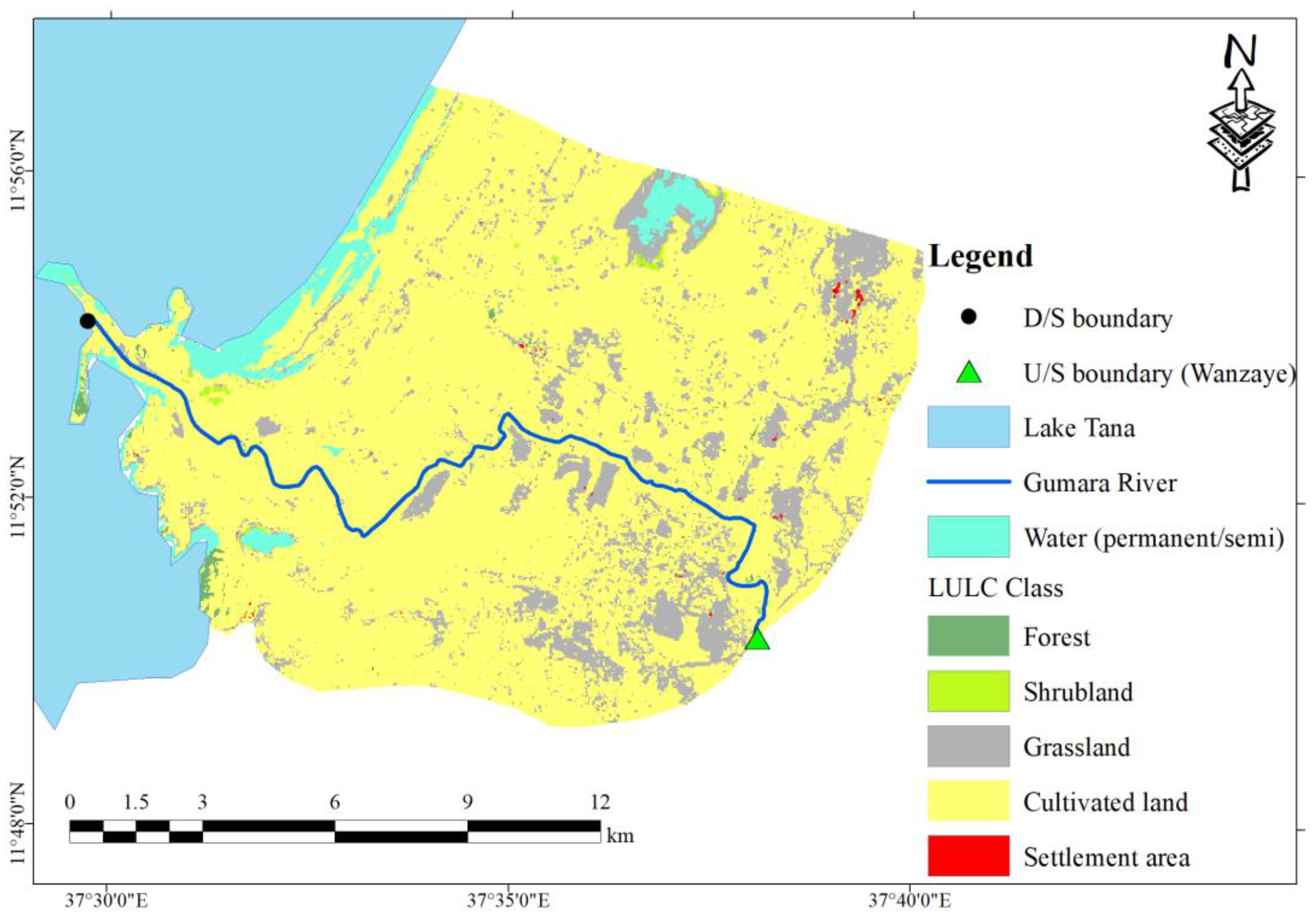
2.1. Study Area
2.2. Data Used
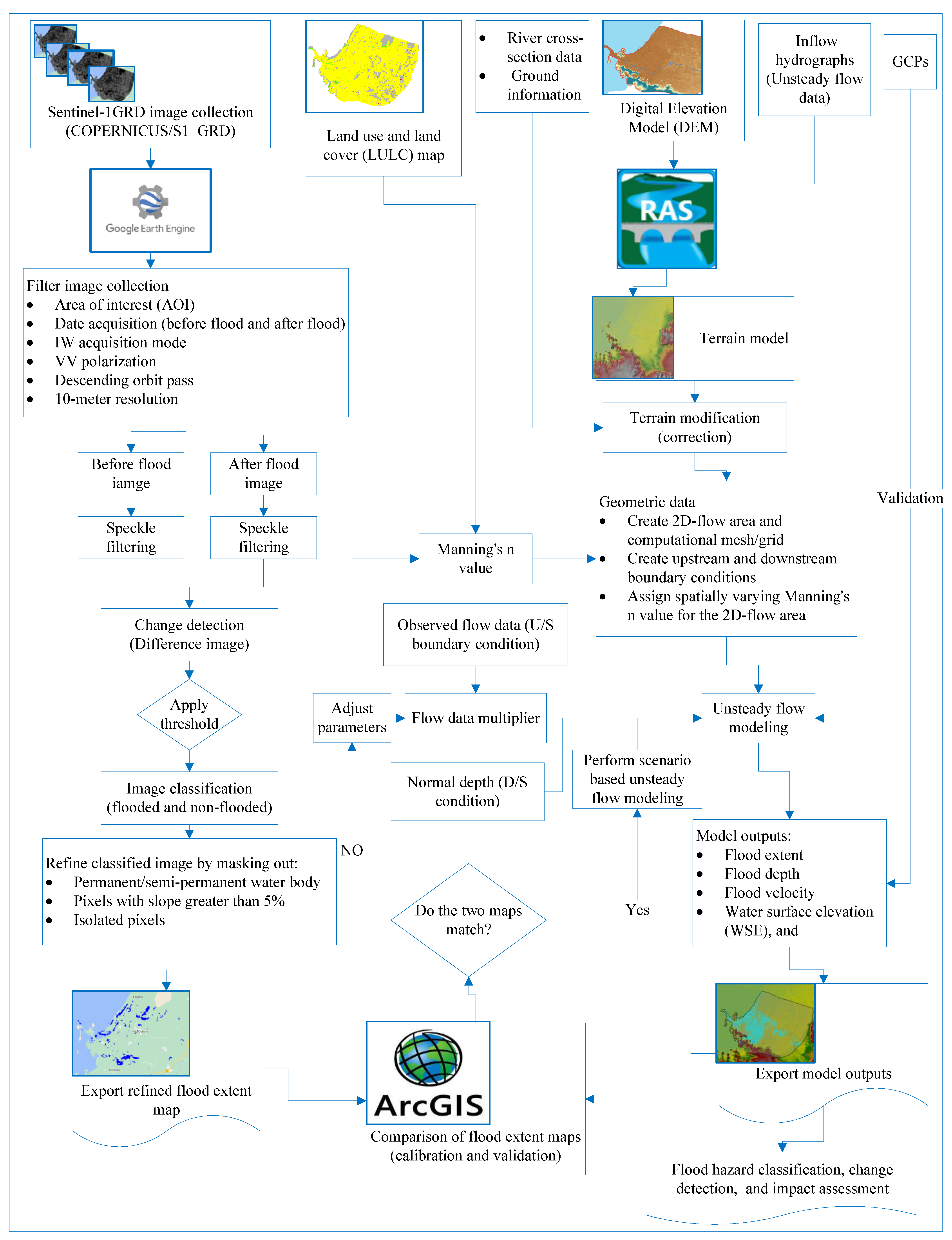
2.3. Methodological Framework of This Study
2.4. SAR-Based Flood Inundation Mapping
2.4.1. Importing and Filtering of SAR Image Collection
2.4.2. Preprocessing
2.4.3. Change Detection and Thresholding
2.4.4. Refining and Exporting Flood Extent Maps
2.5. Hydraulic Flood Modeling
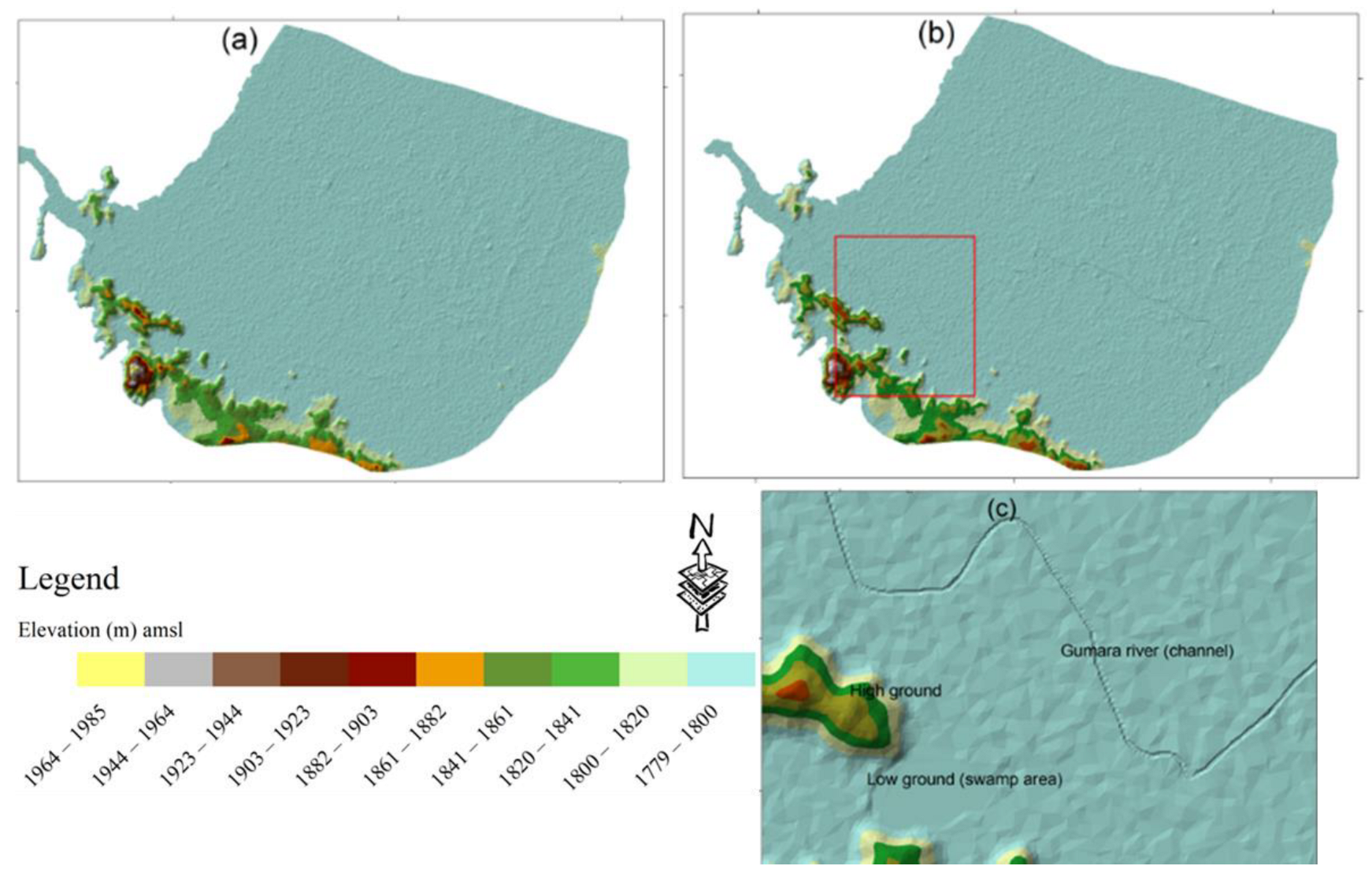
2.5.1. Terrain Preprocessing
2.5.2. Two-Dimensional Flow Area and Computational Mesh
2.5.3. Boundary Conditions and Manning’s Roughness Coefficient (n Value)
2.5.4. Unsteady Flow Analysis
2.5.5. Model Sensitivity Analysis
2.5.6. Model Calibration
2.5.7. Model Performance Evaluation
2.5.8. Model Validation
2.5.9. Flood Hazard Mapping
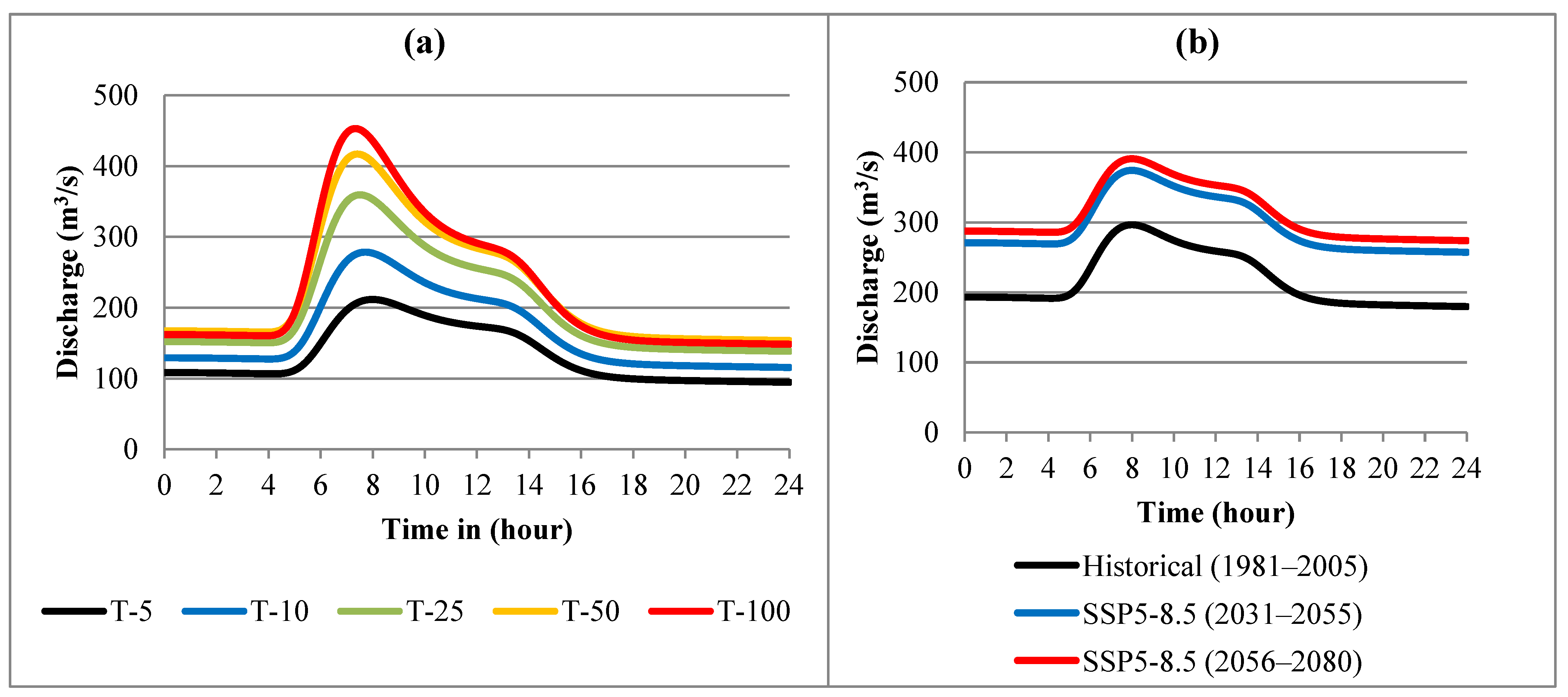
2.5.10. Flood Inundation Mapping for Different Return Periods and Under Changing LULC and Climate Conditions
3. Results
3.1. SAR-Based Flood Inundation Maps
3.1.1. Pre- and Postflood SAR Images
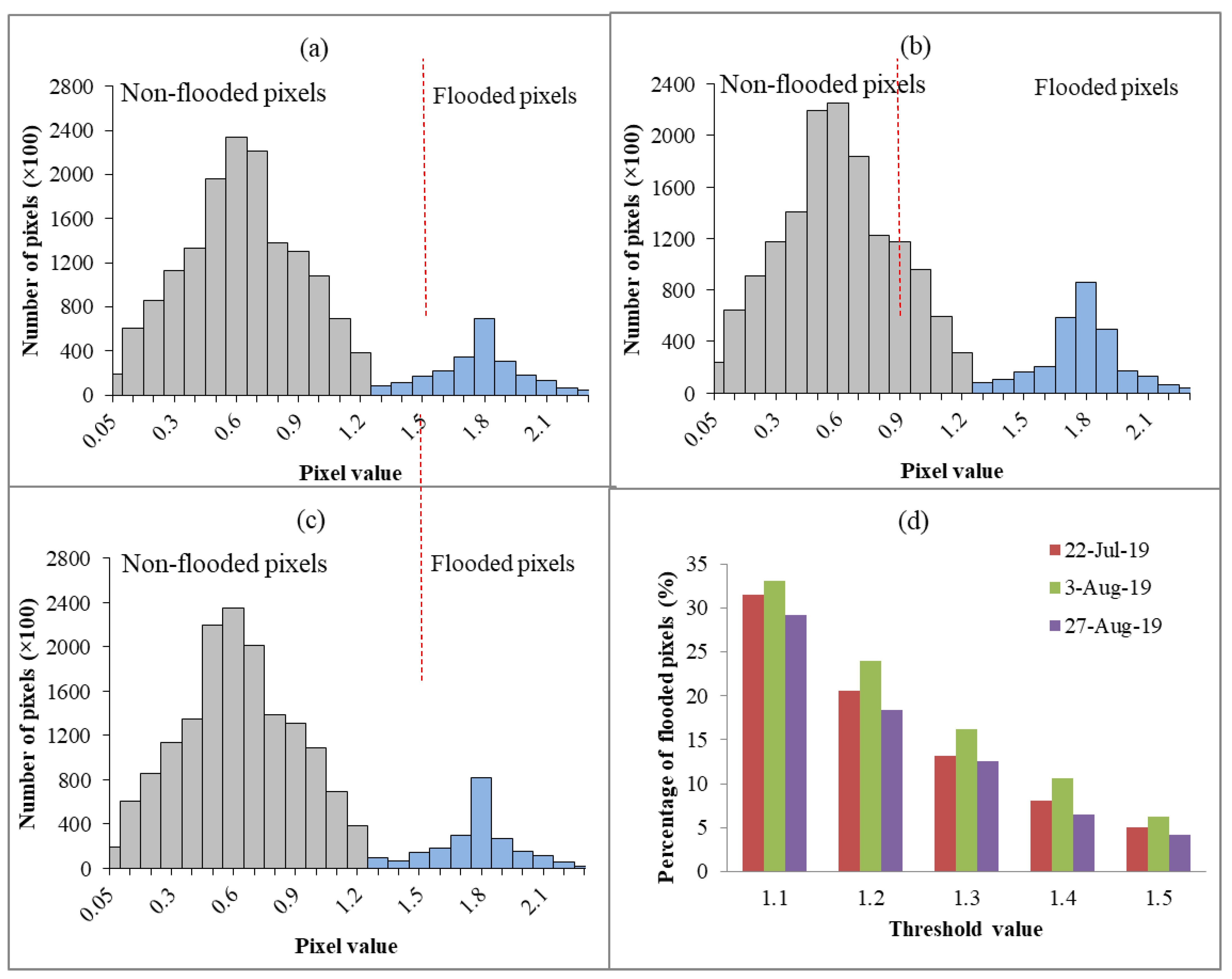
3.1.2. Change Detection and Thresholding
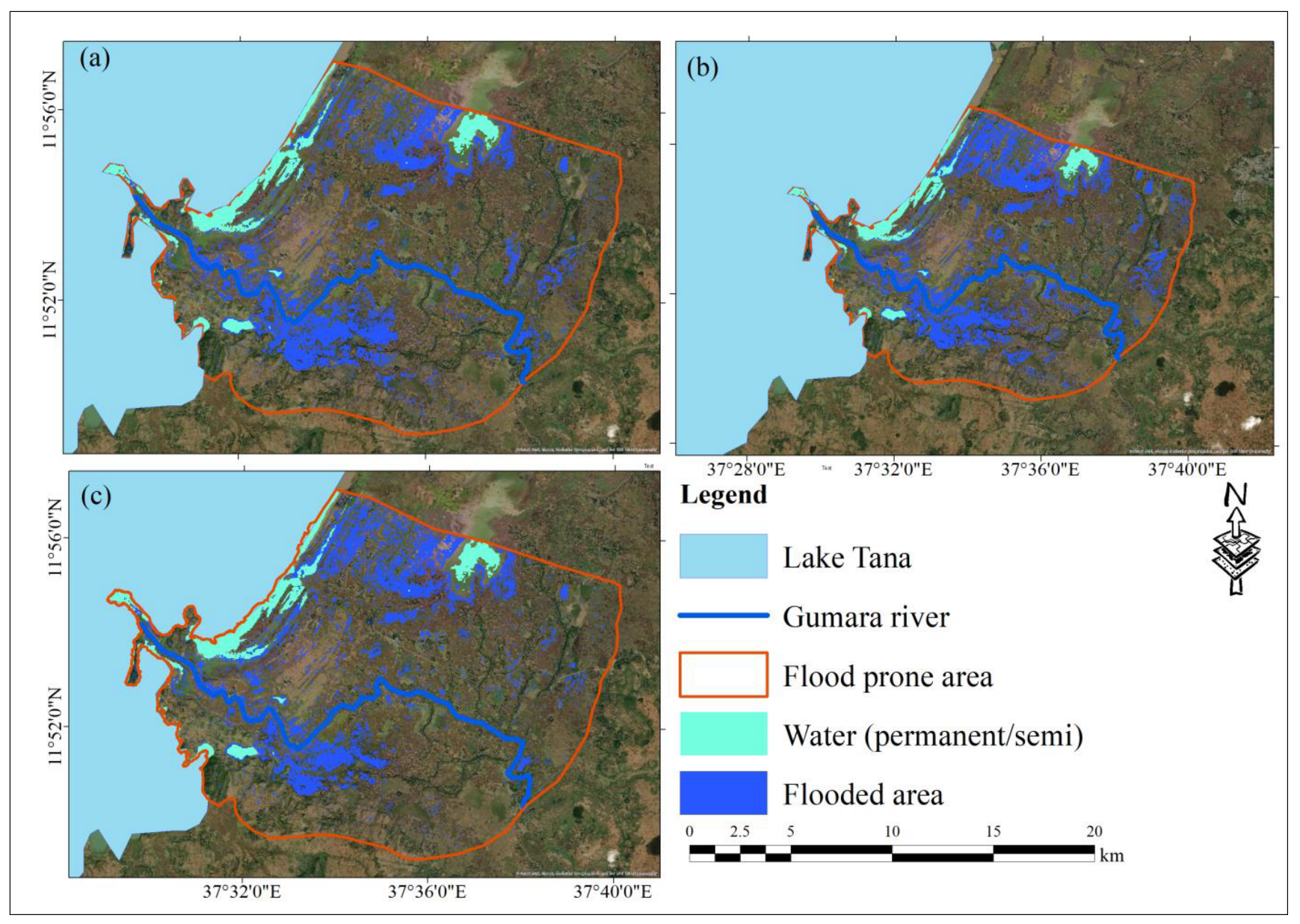
3.1.3. SAR-Based Flood Inundation Maps for 2019
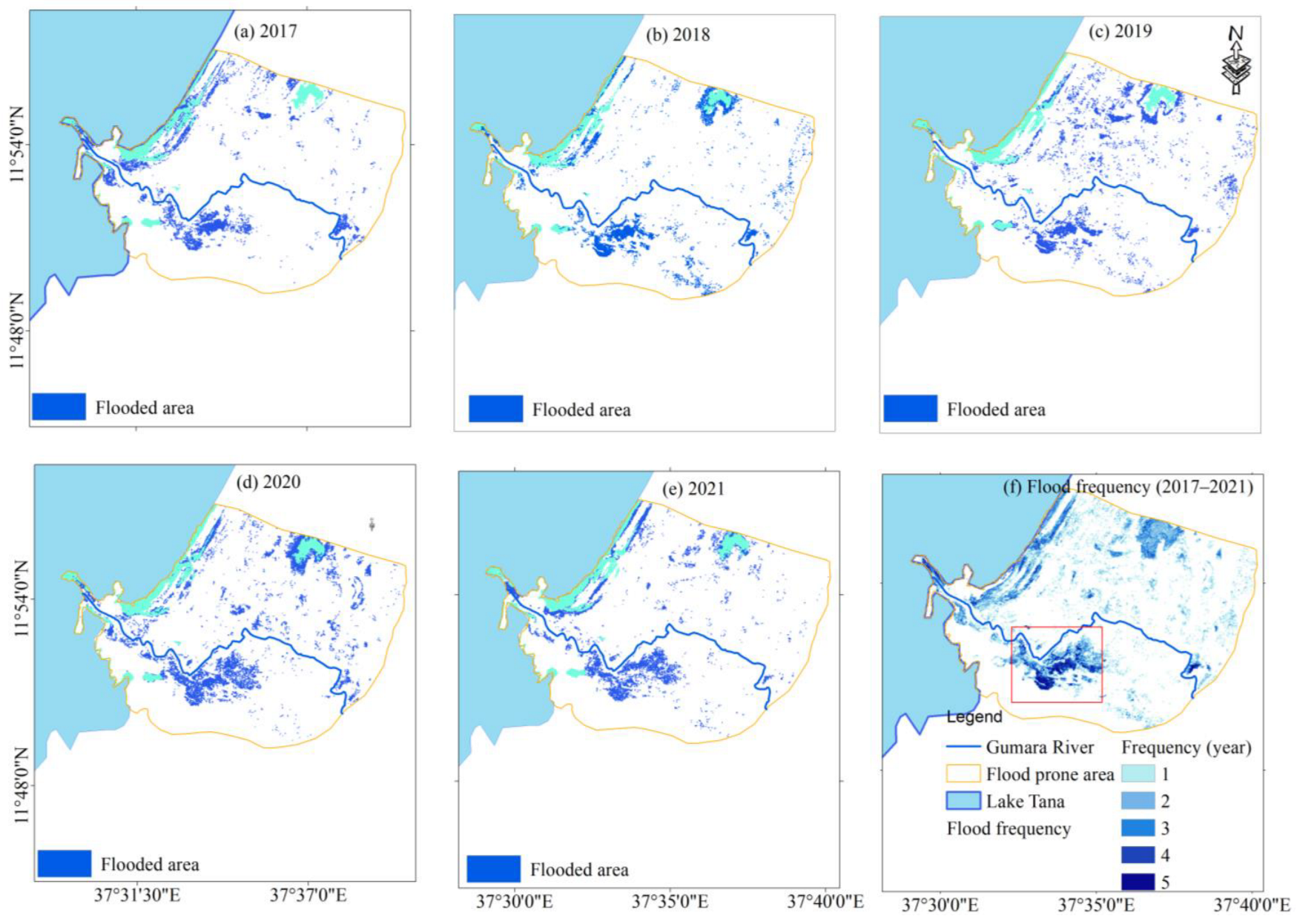
3.1.4. SAR-Based Flood Frequency Mapping
3.2. Hydraulic Flood Modeling
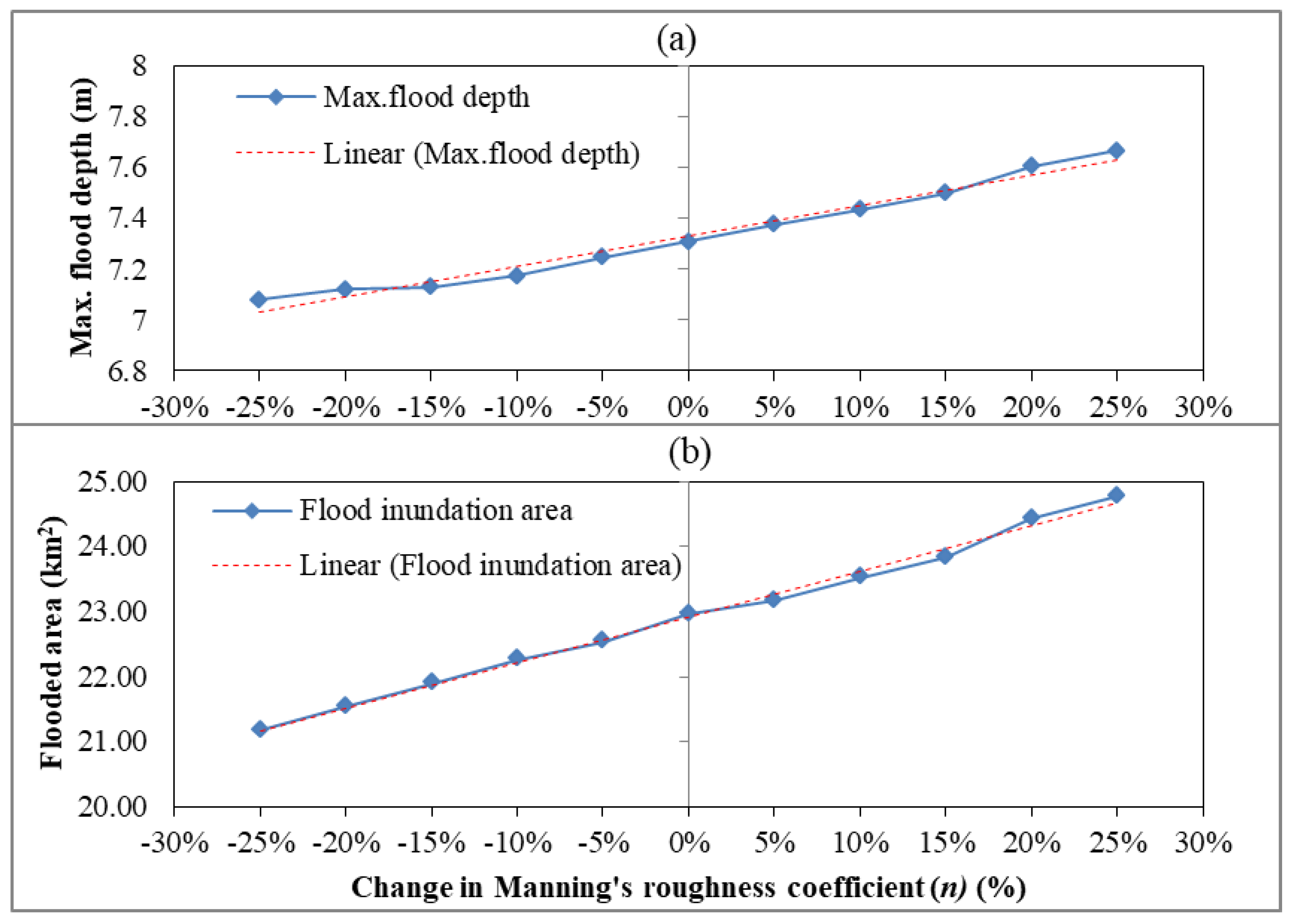
3.2.1. Sensitivity Analysis
3.2.2. Model Calibration
3.2.3. Model Performance Evaluation
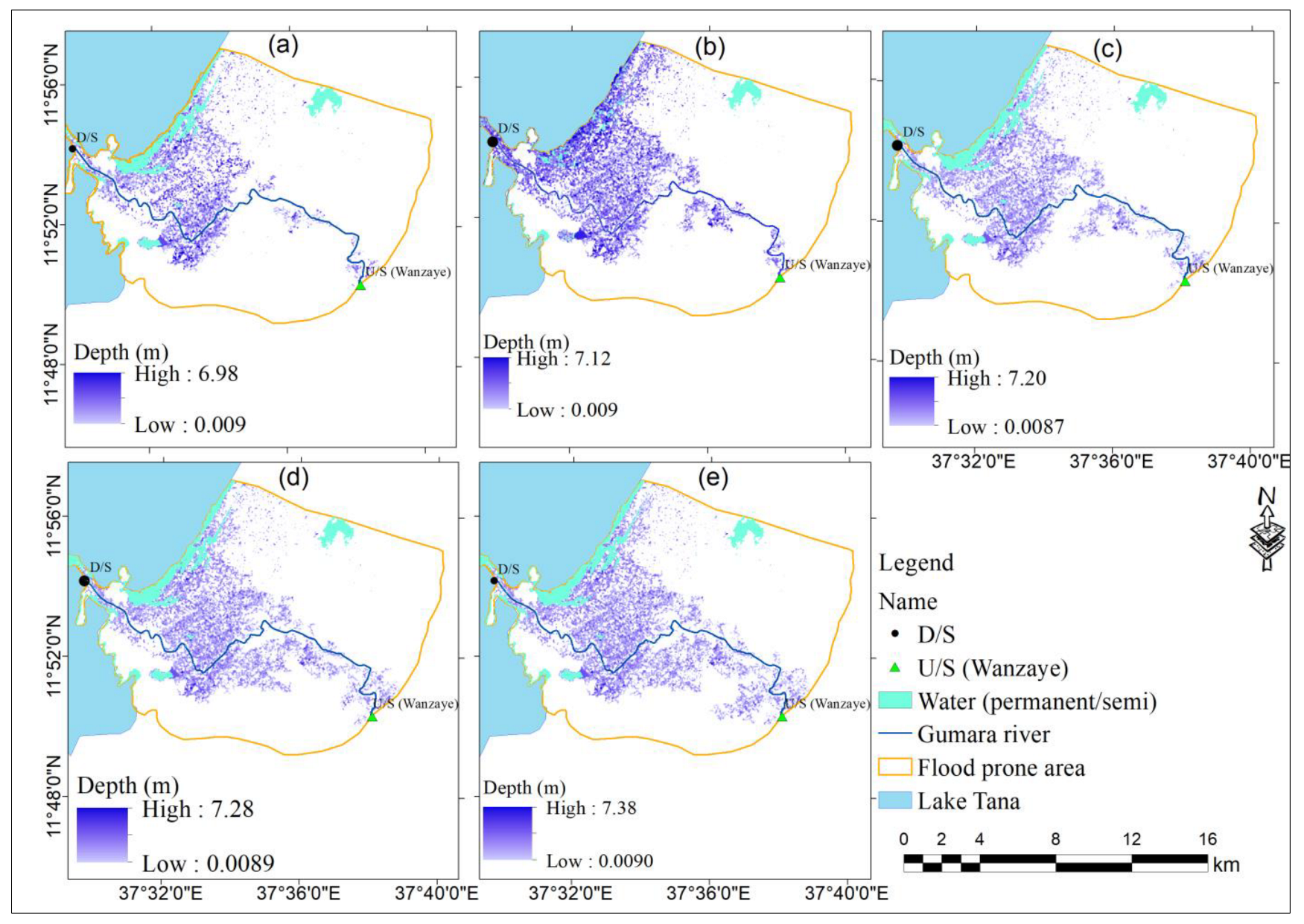
3.2.4. HEC-RAS Model-Simulated Flood Inundation Maps
3.2.5. Model Validation
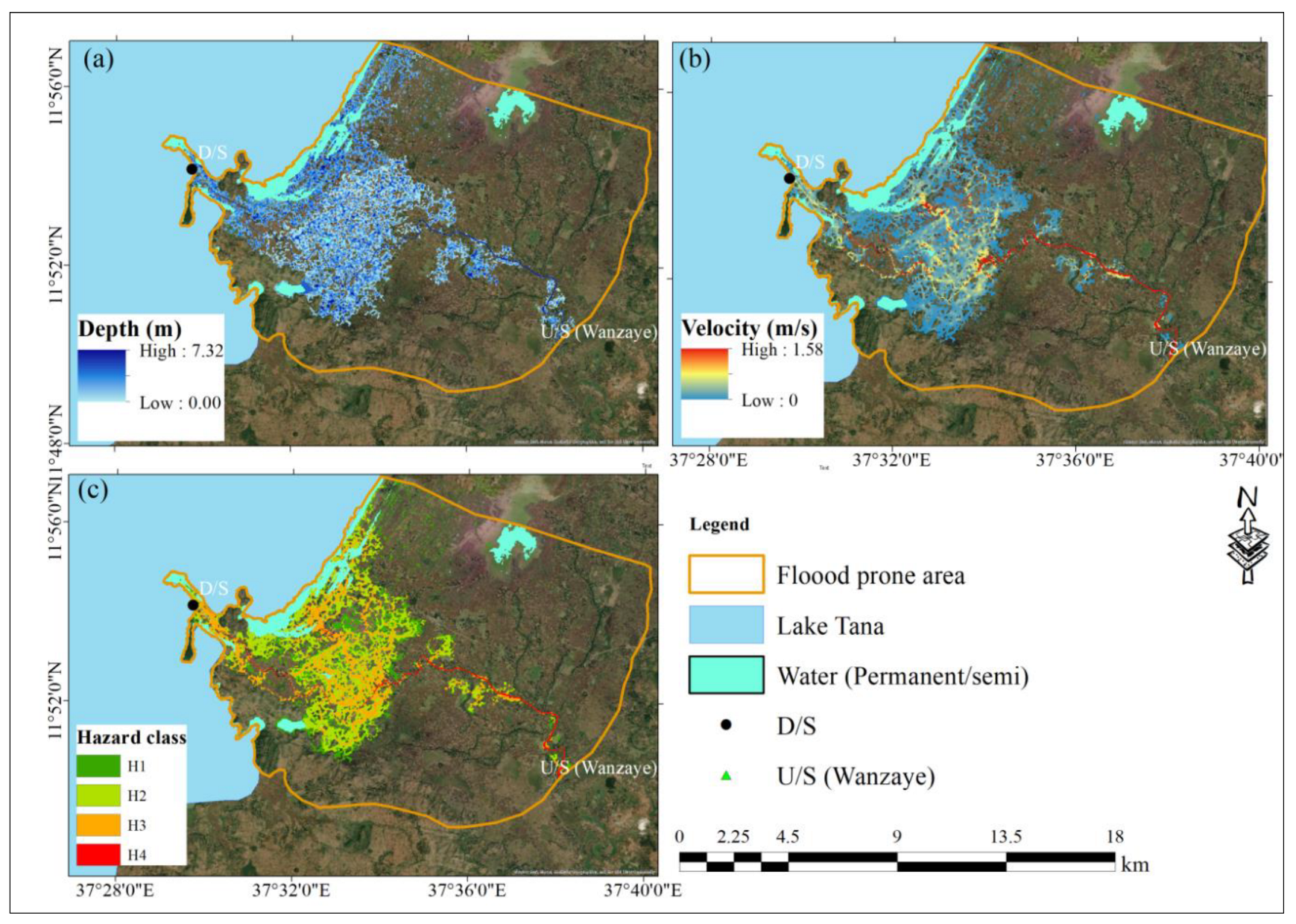
3.2.6. Flood Hazard Mapping
3.2.7. Flood Inundation Maps Under LULC and Climate Changes
3.2.8. Comparison of Flood Frequency Maps
4. Discussion
4.1. SAR-Derived Flood Inundation Mapping
4.2. HEC-RAS 2D Flood Modeling
4.3. Future Research Directions
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kundzewicz, Z.W.; Kanae, S.; Seneviratne, S.I.; Handmer, J.; Nicholls, N.; Peduzzi, P.; Mechler, R.; Bouwer, L.M.; Arnell, N.; Mach, K. Flood Risk and Climate Change: Global and Regional Perspectives. Hydrol. Sci. J. 2014, 59, 1–28. [Google Scholar]
- Taye, M.T.; Dyer, E. Hydrologic Extremes in a Changing Climate: A Review of Extremes in East Africa. Curr. Clim. Change Rep. 2024, 10, 1–11. [Google Scholar] [CrossRef]
- Kwakye, S.O.; Bárdossy, A. Quantification of the Hydrological Consequences of Climate Change in a Typical West African Catchment Using Flow Duration Curves. J. Water Clim. Change 2022, 13, 26–42. [Google Scholar] [CrossRef]
- Getahun, Y.S.; Gebre, S.L. Flood Hazard Assessment and Mapping of Flood Inundation Area of the Awash River Basin in Ethiopia Using GIS and HEC-GeoRAS/HEC-RAS Model. J. Civ. Environ. Eng. 2015, 5, 1. [Google Scholar]
- Fekadu, A. Detecting Flash Flood Hazard Areas Using Geo-Spatial–Based Analytic Hierarchy Process in Weidie Watershed South Western Ethiopia. J. Remote Sens. GIS 2018, 7, 1–5. [Google Scholar] [CrossRef]
- Adane, G.B.; Kassa, A.K.; Toni, A.T.; Tekle, S.L. Spatial Runoff Estimation under Different Land Uses and Rainfall Frequencies: Case of Flood-Prone Dechatu River Catchment, Dire Dawa, Ethiopia. Arab. J. Geosci. 2022, 15, 1092. [Google Scholar]
- Belay, H.; Melesse, A.M.; Tegegne, G. Evaluation and Comparison of the Performances of the CMIP5 and CMIP6 Models in Reproducing Extreme Rainfall in the Upper Blue Nile Basin of Ethiopia. Theor. Appl. Climatol. 2024, 155, 9471–9496. [Google Scholar] [CrossRef]
- United Nations Office for the Coordination of Humanitarian Affairs (OCHA). Eastern Africa Region: Regional Floods Snapshot. 2019. Available online: https://reliefweb.int/report/south-sudan/eastern-africa-region-regional-flood-snapshot-november-2019 (accessed on 20 March 2024).
- Pandey, A.C.; Kaushik, K.; Parida, B.R. Google Earth Engine for Large-Scale Flood Mapping Using SAR Data and Impact Assessment on Agriculture and Population of Ganga-Brahmaputra Basin. Sustainability 2022, 14, 4210. [Google Scholar] [CrossRef]
- Psomiadis, E.; Diakakis, M.; Soulis, K.X. Combining SAR and Optical Earth Observation with Hydraulic Simulation for Flood Mapping and Impact Assessment. Remote Sens. 2020, 12, 3980. [Google Scholar] [CrossRef]
- Elkhrachy, I.; Pham, Q.B.; Costache, R.; Mohajane, M.; Rahman, K.U.; Shahabi, H.; Linh, N.T.T.; Anh, D.T. Sentinel-1 Remote Sensing Data and Hydrologic Engineering Centres River Analysis System Two-Dimensional Integration for Flash Flood Detection and Modelling in New Cairo City, Egypt. J. Flood Risk Manag. 2021, 14, e12692. [Google Scholar] [CrossRef]
- Ouled Sghaier, M.; Hammami, I.; Foucher, S.; Lepage, R. Flood Extent Mapping from Time-Series SAR Images Based on Texture Analysis and Data Fusion. Remote Sens. 2018, 10, 237. [Google Scholar] [CrossRef]
- Tiwari, V.; Kumar, V.; Matin, M.A.; Thapa, A.; Ellenburg, W.L.; Gupta, N.; Thapa, S. Flood Inundation Mapping-Kerala 2018; Harnessing the Power of SAR, Automatic Threshold Detection Method and Google Earth Engine. PLoS ONE 2020, 15, e0237324. [Google Scholar] [CrossRef]
- Kumar, H.; Karwariya, S.K.; Kumar, R. Google Earth Engine-Based Identification of Flood Extent and Flood-Affected Paddy Rice Fields Using Sentinel-2 MSI and Sentinel-1 SAR Data in Bihar State, India. J. Indian Soc. Remote Sens. 2022, 50, 791–803. [Google Scholar] [CrossRef]
- Tay, C.W.J.; Yun, S.H.; Chin, S.T.; Bhardwaj, A.; Jung, J.; Hill, E.M. Rapid Flood and Damage Mapping Using Synthetic Aperture Radar in Response to Typhoon Hagibis, Japan. Sci. Data 2020, 7, 100. [Google Scholar] [CrossRef]
- Anusha, N.; Bharathi, B. Flood Detection and Flood Mapping Using Multi-Temporal Synthetic Aperture Radar and Optical Data. Egypt. J. Remote Sens. Sp. Sci. 2020, 23, 207–219. [Google Scholar]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Guerriero, L.; Ferrazzoli, P. Flood Monitoring Using Multi-Temporal COSMO-SkyMed Data: Image Segmentation and Signature Interpretation. Remote Sens. Environ. 2011, 115, 990–1002. [Google Scholar]
- Grimaldi, S.; Xu, J.; Li, Y.; Pauwels, V.R.N.; Walker, J.P. Flood Mapping under Vegetation Using Single SAR Acquisitions. Remote Sens. Environ. 2020, 237, 111582. [Google Scholar] [CrossRef]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-Based Flood Mapping: A Fully Automated Processing Chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar]
- Aldiansyah, S.; Saputra, R.A.; Wahid, K.A.; Madani, I.; Setiyo, D. Rapid Flood Inundation Mapping Using Multi-Temporal Sentinel-1 SAR: An Example from Kendari City. J. Geosains Dan Remote Sens. 2024, 5, 15–26. [Google Scholar] [CrossRef]
- Singh, G.; Rawat, K.S. Mapping Flooded Areas Utilizing Google Earth Engine and Open SAR Data: A Comprehensive Approach for Disaster Response. Discov. Geosci. 2024, 2, 5. [Google Scholar] [CrossRef]
- Nghia, B.P.Q.; Pal, I.; Chollacoop, N.; Mukhopadhyay, A. Applying Google Earth Engine for Flood Mapping and Monitoring in the Downstream Provinces of Mekong River. Prog. Disaster Sci. 2022, 14, 100235. [Google Scholar] [CrossRef]
- Passah, A.; Sur, S.N.; Abraham, A.; Kandar, D. Synthetic Aperture Radar Image Analysis Based on Deep Learning: A Review of a Decade of Research. Eng. Appl. Artif. Intell. 2023, 123, 106305. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar]
- Amitrano, D.; Di Martino, G.; Di Simone, A.; Imperatore, P. Flood Detection with SAR: A Review of Techniques and Datasets. Remote Sens. 2024, 16, 656. [Google Scholar] [CrossRef]
- Perera, E.D.P.; Lahat, L. Fuzzy Logic Based Flood Forecasting Model for the Kelantan River Basin, Malaysia. J. Hydro-Environ. Res. 2015, 9, 542–553. [Google Scholar]
- Nobre, A.D.; Cuartas, L.A.; Momo, M.R.; Severo, D.L.; Pinheiro, A.; Nobre, C.A. HAND Contour: A New Proxy Predictor of Inundation Extent. Hydrol. Process. 2016, 30, 320–333. [Google Scholar]
- Clement, M.A.; Kilsby, C.G.; Moore, P. Multi-Temporal Synthetic Aperture Radar Flood Mapping Using Change Detection. J. Flood Risk Manag. 2018, 11, 152–168. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.J.-P.; Bates, P.D.; Mason, D.C. A Change Detection Approach to Flood Mapping in Urban Areas Using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2417–2430. [Google Scholar]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood Extent Mapping for Namibia Using Change Detection and Thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. Automatica 1975, 11, 23–27. [Google Scholar]
- Anuthaman, S.N.; Ramasamy, S.; Lakshminarayanan, B.; Ramasubbu, B. Modelling and Forecasting of Urban Flood under Changing Climate and Land Use Land Cover. J. Water Clim. Change 2023, 14, 4314–4335. [Google Scholar] [CrossRef]
- Mzava, P.; Valimba, P.; Nobert, J. Quantitative Analysis of the Impacts of Climate and Land-Cover Changes on Urban Flood Runoffs: A Case of Dar Es Salaam, Tanzania. J. Water Clim. Change 2021, 12, 2835–2853. [Google Scholar] [CrossRef]
- Brunner, G.W. HEC-RAS HEC-RAS 2D User ’ s Manual. U.S. Army Corps Eng. 2024, 6.5, 1–272. [Google Scholar]
- Rangari, V.A.; Umamahesh, N.V.; Bhatt, C.M. Assessment of Inundation Risk in Urban Floods Using HEC RAS 2D. Model. Earth Syst. Environ. 2019, 5, 1839–1851. [Google Scholar] [CrossRef]
- Quirogaa, V.M.; Kurea, S.; Udoa, K.; Manoa, A. Application of 2D Numerical Simulation for the Analysis of the February 2014 Bolivian Amazonia Flood: Application of the New HEC-RAS Version 5. Ribagua 2016, 3, 25–33. [Google Scholar] [CrossRef]
- Ezzine, A.; Saidi, S.; Hermassi, T.; Kammessi, I.; Darragi, F.; Rajhi, H. Flood Mapping Using Hydraulic Modeling and Sentinel-1 Image: Case Study of Medjerda Basin, Northern Tunisia. Egypt. J. Remote Sens. Sp. Sci. 2020, 23, 303–310. [Google Scholar] [CrossRef]
- Ongdas, N.; Akiyanova, F.; Karakulov, Y.; Muratbayeva, A.; Zinabdin, N. Application of Hec-Ras (2d) for Flood Hazard Maps Generation for Yesil (Ishim) River in Kazakhstan. Water 2020, 12, 2672. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Ferraro, D.; Macchione, F.; Petaccia, G. Performances of the New HEC-RAS Version 5 for 2-D Hydrodynamic-Based Rainfall-Runoff Simulations at Basin Scale: Comparison with a State-of-the Art Model. Water 2020, 12, 2326. [Google Scholar] [CrossRef]
- Melkamu, T.; Bagyaraj, M.; Adimaw, M.; Ngusie, A. Detecting and Mapping Flood Inundation Areas in Fogera-Dera Floodplain, Ethiopia during an Extreme Wet Season Using Sentinel-1 Data. Phys. Chem. Earth Parts a/b/c 2022, 127, 103189. [Google Scholar] [CrossRef]
- Alemu, D.; Assaye, A. Devastating Effect of Floods on Rice Production and Commercialization in the Fogera Plain; Future Agricultures Consortium Secretariat: Brighton, UK, 2020. [Google Scholar]
- Gashaw, W.; Legesse, D. Flood Hazard and Risk Assessment Using GIS and Remote Sensing in Fogera Woreda, Northwest Ethiopia. Nile River Basin 2011, 6, 179–206. [Google Scholar] [CrossRef]
- Nigusie, A.A.; Shiferaw, K.M.; Ebrahim, S.E. Flood Inundation Modeling Using HEC-RAS: The Case of Downstream Gumara River, Lake Tana Sub Basin, Ethiopia. Geocarto Int. 2021, 37, 9625–9643. [Google Scholar] [CrossRef]
- Belay, H.; Melesse, A.M.; Tegegne, G. Scenario-Based Land Use and Land Cover Change Detection and Prediction Using the Cellular Automata–Markov Model in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia. Land 2024, 13, 396. [Google Scholar] [CrossRef]
- Chakilu, G.G.; Moges, M.A. Assessing the Land Use/Cover Dynamics and Its Impact on the Low Flow of Gumara Watershed, Upper Blue Nile Basin, Ethiopia. Hydrol. Curr. Res. 2017, 8, 268. [Google Scholar] [CrossRef]
- Dawit, M.; Halefom, A.; Teshome, A.; Sisay, E.; Shewayirga, B.; Dananto, M. Changes and Variability of Precipitation and Temperature in the Guna Tana Watershed, Upper Blue Nile Basin, Ethiopia. Model. Earth Syst. Environ. 2019, 5, 1395–1404. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-Resolution Mapping of Global Surface Water and Its Long-Term Changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Belay, H.; Melesse, A.M.; Tegegne, G.; Tamiru, H. Identifying Flood Source Areas and Analyzing High-Flow Extremes Under Changing Land Use, Land Cover, and Climate in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia. Climate 2025, 13, 7. [Google Scholar] [CrossRef]
- Lee, J.-S.; Jurkevich, L.; Dewaele, P.; Wambacq, P.; Oosterlinck, A. Speckle Filtering of Synthetic Aperture Radar Images: A Review. Remote Sens. Rev. 1994, 8, 313–340. [Google Scholar]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. In Proceedings of the Proceedings; MDPI: Basel, Switzerland, 2019; Volume 18, p. 11. [Google Scholar]
- United Nations Platform for Space-based Information for Disaster Management and Emergency Response (UN-SPIDER). Step by Step: Recommended Practice Flood Mapping. Available online: https://www.un-spider.org/advisory-support/recommended-practices/recommended-practice-flood-mapping/step-by-step (accessed on 1 March 2024).
- Loukili, Y.; Lakhrissi, Y.; Ali, S.E. Ben Flood Mapping Methodologies in Google Earth Engine Using Optical and Radar Data: A Comparative Study. J. Environ. Earth Sci. 2025, 7, 363–380. [Google Scholar] [CrossRef]
- Tupas, M.E.; Roth, F.; Bauer-Marschallinger, B.; Wagner, W. An Intercomparison of Sentinel-1 Based Change Detection Algorithms for Flood Mapping. Remote Sens. 2023, 15, 1200. [Google Scholar] [CrossRef]
- Notti, D.; Giordan, D.; Caló, F.; Pepe, A.; Zucca, F.; Galve, J.P. Potential and Limitations of Open Satellite Data for Flood Mapping. Remote Sens. 2018, 10, 1673. [Google Scholar] [CrossRef]
- Akiyanova, F.; Ongdas, N.; Zinabdin, N.; Karakulov, Y.; Nazhbiyev, A.; Mussagaliyeva, Z.; Atalikhova, A. Operation of Gate-Controlled Irrigation System Using HEC-RAS 2D for Spring Flood Hazard Reduction. Computation 2023, 11, 27. [Google Scholar] [CrossRef]
- Brunner, G.W. HEC-RAS HEC-RAS Hydraulic Reference. U.S. Army Corps Eng. 2024, 6.5, 1–477. [Google Scholar]
- Chaudhry, M.H. Open-Channel Flow; Springer: Berlin/Heidelberg, Germany, 2008; Volume 523. [Google Scholar]
- Robinson, D.; Zundel, A.; Kramer, C.; Nelson, R.; deRosset, W.; Hunt, J.; Hogan, S.; Lai, Y.; Aquaveo, L.L.C. Two-Dimensional Hydraulic Modeling for Highways in the River Environment: Reference Document; Federal Highway Administration (US): Washington, DC, USA, 2019. [Google Scholar]
- Mekuria, W.; Mekonnen, K.; Thorne, P.; Bezabih, M.; Tamene, L.; Abera, W. Competition for Land Resources: Driving Forces and Consequences in Crop-Livestock Production Systems of the Ethiopian Highlands. Ecol. Process. 2018, 7, 30. [Google Scholar] [CrossRef]
- Casulli, V. A High-resolution Wetting and Drying Algorithm for Free-surface Hydrodynamics. Int. J. Numer. Methods Fluids 2009, 60, 391–408. [Google Scholar]
- Chow, V.T. Open-Channel Hydraulics; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Hirsch, C. Computational methods for inviscid and viscous flows. In Numerical Computation of Internal and External Flows; Wiley: Hoboken, NJ, USA, 1990; Volume 2. [Google Scholar]
- Tsubaki, R.; Kawahara, Y. The Uncertainty of Local Flow Parameters during Inundation Flow over Complex Topographies with Elevation Errors. J. Hydrol. 2013, 486, 71–87. [Google Scholar] [CrossRef]
- Ghimire, E.; Sharma, S.; Lamichhane, N. Evaluation of One-Dimensional and Two-Dimensional HEC-RAS Models to Predict Flood Travel Time and Inundation Area for Flood Warning System ABSTRACT. ISH J. Hydraul. Eng. 2020, 28, 110–126. [Google Scholar] [CrossRef]
- Farooq, M.; Shafique, M.; Shahzad, M. Flood Hazard Assessment and Mapping of River Swat Using HEC—RAS 2D Model and High-Resolution 12-m TanDEM-X DEM. Nat. Hazards 2019, 97, 477–492. [Google Scholar] [CrossRef]
- Madhuri, R.; Raja, Y.S.L.S.; Raju, K.S.; Punith, B.S.; Manoj, K. Urban Flood Risk Analysis of Buildings Using HEC-RAS 2D in Climate Change Framework. H2Open J. 2021, 4, 262–275. [Google Scholar]
- Afzal, M.A.; Ali, S.; Nazeer, A.; Khan, M.I.; Waqas, M.M.; Aslam, R.A.; Cheema, M.J.M.; Nadeem, M.; Saddique, N.; Muzammil, M.; et al. Flood Inundation Modeling by Integrating HEC–RAS and Satellite Imagery: A Case Study of the Indus River Basin. Water 2022, 14, 2984. [Google Scholar] [CrossRef]
- Minh, V.A.; Quang, D.N.; Tinh, N.X.; Ribbe, L. Spatio-Temporal Dynamics Monitoring of Surface Water Bodies in Nhat Le River Basin, Vietnam, by Google Earth Engine. J. Water Clim. Change 2024, 15, 1262–1281. [Google Scholar] [CrossRef]
- Peng, X.; Chen, S.; Miao, Z.; Xu, Y.; Ye, M.; Lu, P. Automatic Flood Monitoring Method with SAR and Optical Data Using Google Earth Engine. Water 2025, 17, 177. [Google Scholar] [CrossRef]
- Johary, R.; Révillion, C.; Catry, T.; Alexandre, C.; Mouquet, P.; Rakotoniaina, S.; Pennober, G.; Rakotondraompiana, S. Detection of Large-Scale Floods Using Google Earth Engine and Google Colab. Remote Sens. 2023, 15, 5368. [Google Scholar] [CrossRef]
- Song, L.; Song, C.; Luo, S.; Chen, T.; Liu, K.; Li, Y.; Jing, H.; Xu, J. Refining and Densifying the Water Inundation Area and Storage Estimates of Poyang Lake by Integrating Sentinel-1/2 and Bathymetry Data. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102601. [Google Scholar] [CrossRef]
- United Kingdom Department for Environment, Food, and Rural Affairs (DEFRA). Flood Risk Assessment Guidance for New Development—Phase 2—Technical Report 1. 2005. Available online: http://sciencesearch.defra.gov.uk/Document.aspx?Document=FD2320_3363_TRP.pdf (accessed on 25 March 2024).
- Mason, D.C.; Speck, R.; Devereux, B.; Schumann, G.J.-P.; Neal, J.C.; Bates, P.D. Flood Detection in Urban Areas Using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2009, 48, 882–894. [Google Scholar]
- Dimitriadis, P.; Tegos, A.; Oikonomou, A.; Pagana, V.; Koukouvinos, A.; Mamassis, N.; Koutsoyiannis, D.; Efstratiadis, A. Comparative Evaluation of 1D and Quasi-2D Hydraulic Models Based on Benchmark and Real-World Applications for Uncertainty Assessment in Flood Mapping. J. Hydrol. 2016, 534, 478–492. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159–174. [Google Scholar]
- FEMA (Federal Emergency Management Agency). Map Modernization, Guidelines, and Specifications for Flood Hazard Mapping Partners. 2003. Available online: https://www.fema.gov/ (accessed on 15 March 2024).
- Yang, S.; Yang, D.; Zhao, B.; Ma, T.; Lu, W.; Santisirisomboon, J. Future Changes in High and Low Flows under the Impacts of Climate and Land Use Changes in the Jiulong River Basin of Southeast China. Atmosphere 2022, 13, 150. [Google Scholar] [CrossRef]
- Akter, T.; Quevauviller, P.; Eisenreich, S.J.; Vaes, G. Impacts of Climate and Land Use Changes on Flood Risk Management for the Schijn River, Belgium. Environ. Sci. Policy 2018, 89, 163–175. [Google Scholar] [CrossRef]
- Huang, M.; Jin, S. Rapid Flood Mapping and Evaluation with a Supervised Classifier and Change Detection in Shouguang Using Sentinel-1 SAR and Sentinel-2 Optical Data. Remote Sens. 2020, 12, 2073. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Plank, S.; Ludwig, R. An Automatic Change Detection Approach for Rapid Flood Mapping in Sentinel-1 SAR Data. Int. J. Appl. earth Obs. Geoinf. 2018, 73, 123–135. [Google Scholar]
- Zhao, M.; Ling, Q.; Li, F. An Iterative Feedback-Based Change Detection Algorithm for Flood Mapping in SAR Images. IEEE Geosci. Remote Sens. Lett. 2018, 16, 231–235. [Google Scholar]
- Tanim, A.H.; McRae, C.B.; Tavakol-Davani, H.; Goharian, E. Flood Detection in Urban Areas Using Satellite Imagery and Machine Learning. Water 2022, 14, 1140. [Google Scholar] [CrossRef]
- Nasiri, V.; Deljouei, A.; Moradi, F.; Sadeghi, S.M.M.; Borz, S.A. Land Use and Land Cover Mapping Using Sentinel-2, Landsat-8 Satellite Images, and Google Earth Engine: A Comparison of Two Composition Methods. Remote Sens. 2022, 14, 1977. [Google Scholar] [CrossRef]
- Chen, Q.; Chen, H.; Zhang, J.; Hou, Y.; Shen, M.; Chen, J.; Xu, C. Impacts of Climate Change and LULC Change on Runoff in the Jinsha River Basin. J. Geogr. Sci. 2020, 30, 85–102. [Google Scholar] [CrossRef]
- Saghafian, B.; Farazjoo, H.; Bozorgy, B.; Yazdandoost, F. Flood Intensification Due to Changes in Land Use. Water Resour. Manag. 2008, 22, 1051–1067. [Google Scholar] [CrossRef]
- Lane, R.A.; Kay, A.L. Climate Change Impact on the Magnitude and Timing of Hydrological Extremes Across Great Britain. Front. Water 2021, 3, 684982. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hazard Class | DVP (m2/s) Hazard Rating |
|---|---|
| Low (H1) | DVP < 0.75 |
| Moderate (H2) | 0.75 ≤ DVP < 1.25 |
| Significant (H3) | 1.25 ≤ DVP < 2.0 |
| Extreme (H4) | DVP ≥ 2.5 |
| Year | Optimal Threshold Value | Flood Inundation Area (km2) |
|---|---|---|
| 2017 | 1.30 | 14.09 |
| 2018 | 1.25 | 11.22 |
| 2019 | 1.30 | 15.00 |
| 2020 | 1.34 | 21.15 |
| 2021 | 1.30 | 16.41 |
| Average | 1.32 | 15.57 |
| Change in Manning’s Roughness Coefficient (n) | Maximum Flood Depth (m) | Change in Maximum Flood Depth (%) | Flood Inundation Area (km2) | Change in Flooded Area (%) |
|---|---|---|---|---|
| −25% | 7.08 | −3.13 | 21.17 | −7.79 |
| −20% | 7.12 | −2.59 | 21.53 | −6.22 |
| −15% | 7.13 | −2.46 | 21.89 | −4.68 |
| −10% | 7.17 | −1.87 | 22.26 | −3.06 |
| −5% | 7.25 | −0.85 | 22.54 | −1.84 |
| 0% (baseline) | 7.31 | - | 22.96 | - |
| 5% | 7.38 | 0.91 | 23.17 | 0.88 |
| 10% | 7.43 | 1.72 | 23.52 | 2.42 |
| 15% | 7.50 | 2.58 | 23.84 | 3.80 |
| 20% | 7.60 | 4.01 | 24.43 | 6.38 |
| 25% | 7.66 | 4.87 | 24.77 | 7.86 |
| Manning’s Roughness n Value | |||||||
|---|---|---|---|---|---|---|---|
| Land Use/Land Cover Type | Minimum | Maximum | Average (Initially Assigned) | Calibrated (22 July 2019) | Calibrated (3 August 2019) | Calibrated (27 August 2019) | Calibrated |
| (Average of the Three Events) | |||||||
| Forest | 0.080 | 0.160 | 0.120 | 0.110 | 0.102 | 0.088 | 0.101 |
| Shrubland | 0.050 | 0.120 | 0.085 | 0.081 | 0.094 | 0.066 | 0.082 |
| Cultivated land | 0.030 | 0.060 | 0.045 | 0.044 | 0.045 | 0.031 | 0.040 |
| Grassland | 0.025 | 0.060 | 0.043 | 0.040 | 0.047 | 0.027 | 0.038 |
| River channel area | 0.025 | 0.045 | 0.035 | 0.030 | 0.034 | 0.026 | 0.031 |
| settlement area | 0.010 | 0.050 | 0.030 | 0.020 | 0.018 | 0.016 | 0.018 |
| Water (permanent/semi) | 0.010 | 0.020 | 0.015 | 0.013 | 0.017 | 0.015 | 0.015 |
| Before Calibration | After Calibration | |||||
|---|---|---|---|---|---|---|
| Flood Event | (%) | (%) | ||||
| 22 July 2019 | 0.51 | 86.63 | 0.59 | 0.55 | 87.81 | 0.64 |
| 3 August 2019 | 0.54 | 84.20 | 0.60 | 0.58 | 85.65 | 0.63 |
| 27 August 2019 | 0.56 | 86.15 | 0.57 | 0.59 | 87.30 | 0.60 |
| Average | 0.54 | 85.66 | 0.59 | 0.57 | 86.92 | 0.62 |
| HEC-RAS | Ground Control Points (Reference) | ||||
|---|---|---|---|---|---|
| Flooded | Nonflooded | ∑ | User’s Accuracy (%) | Commission Error (%) | |
| Flooded | 148 | 18 | 166 | 89.16 | 10.84 |
| Nonflooded | 23 | 111 | 134 | 82.84 | 17.16 |
| ∑ | 171 | 129 | 300 | ||
| Producer’s accuracy (%) | 86.55 | 86.05 | |||
| Omission error (%) | 13.45 | 13.95 | |||
| Overall accuracy (%) Kappa coefficient | 86.33 0.72 | ||||
| Return Period (T) | Flooded Area (km2) | Flood Depth (m) | ||
|---|---|---|---|---|
| Min | Max | Average | ||
| T-5 | 21.74 | 0.009 | 6.980 | 0.910 |
| T-10 | 28.08 | 0.009 | 7.120 | 0.920 |
| T-25 | 34.37 | 0.008 | 7.200 | 0.940 |
| T-50 | 39.64 | 0.008 | 7.280 | 0.970 |
| T-100 | 43.32 | 0.009 | 7.380 | 1.020 |
| Study Period | Flood Inundation Area (km2) | Change (%) | Average Flood Depth (m) | Change (%) |
|---|---|---|---|---|
| Historical (1981–2005) | 28.09 | – | 0.92 | – |
| SSP5-8.5 (2031–2055) | 32.72 | 16.48 | 0.95 | 3.26 |
| SSP5-8.5 (2056–2080) | 35.74 | 27.23 | 0.98 | 6.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belay, H.; Melesse, A.M.; Tegegne, G.; Kassaye, S.M. Flood Inundation Mapping Using the Google Earth Engine and HEC-RAS Under Land Use/Land Cover and Climate Changes in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia. Remote Sens. 2025, 17, 1283. https://doi.org/10.3390/rs17071283
Belay H, Melesse AM, Tegegne G, Kassaye SM. Flood Inundation Mapping Using the Google Earth Engine and HEC-RAS Under Land Use/Land Cover and Climate Changes in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia. Remote Sensing. 2025; 17(7):1283. https://doi.org/10.3390/rs17071283
Chicago/Turabian StyleBelay, Haile, Assefa M. Melesse, Getachew Tegegne, and Shimelash Molla Kassaye. 2025. "Flood Inundation Mapping Using the Google Earth Engine and HEC-RAS Under Land Use/Land Cover and Climate Changes in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia" Remote Sensing 17, no. 7: 1283. https://doi.org/10.3390/rs17071283
APA StyleBelay, H., Melesse, A. M., Tegegne, G., & Kassaye, S. M. (2025). Flood Inundation Mapping Using the Google Earth Engine and HEC-RAS Under Land Use/Land Cover and Climate Changes in the Gumara Watershed, Upper Blue Nile Basin, Ethiopia. Remote Sensing, 17(7), 1283. https://doi.org/10.3390/rs17071283