
An Enhanced Phase Gradient Autofocus Algorithm for SAR: A Fractional Fourier Transform Approach

Abstract
1. Introduction
2. Phase Gradient Autofocusing Algorithm with Fractional Fourier Transform
2.1. Phase Gradient Autofocusing Algorithm
2.2. Fractional Fourier Transform
3. Autofocusing Algorithm: FrFT-PGA
3.1. Without Moving Target Signal
- (1)
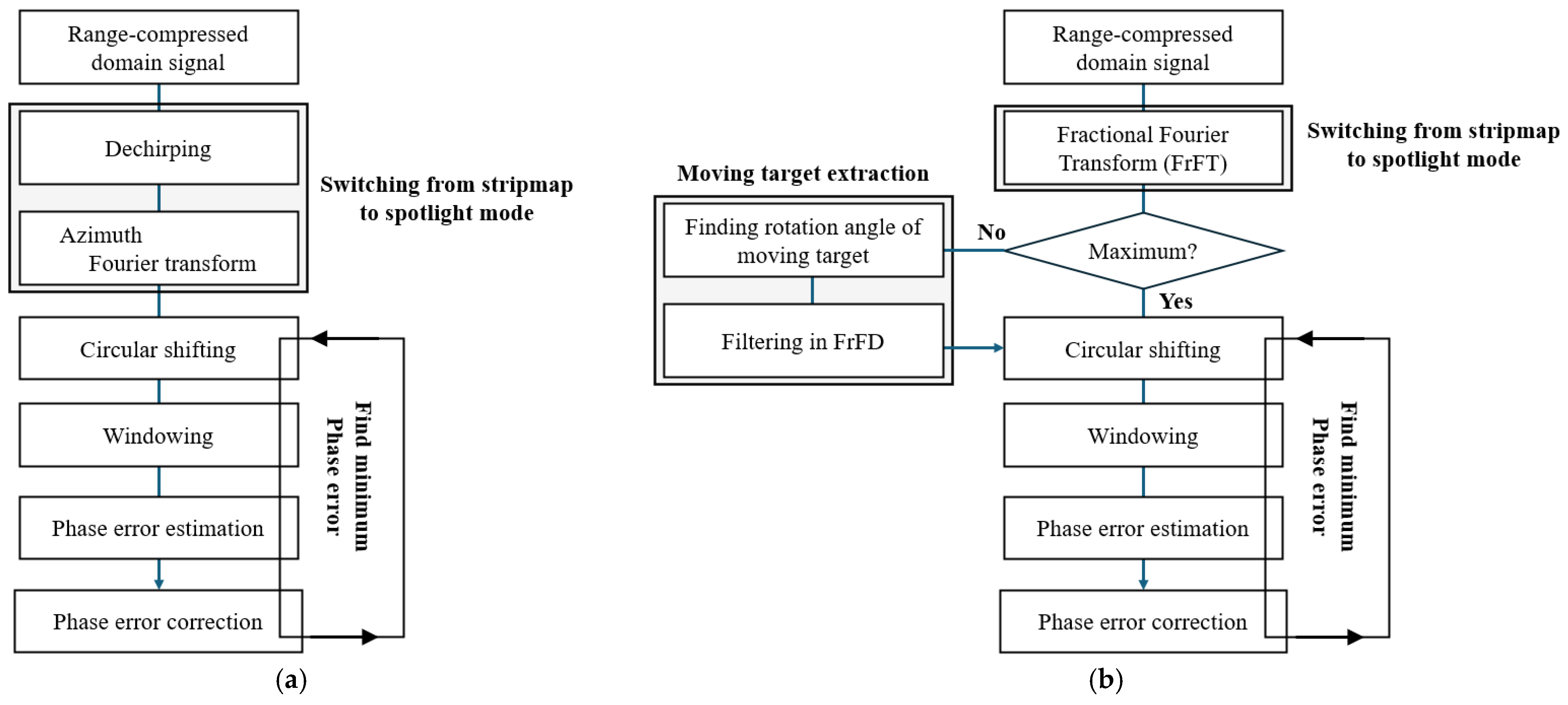
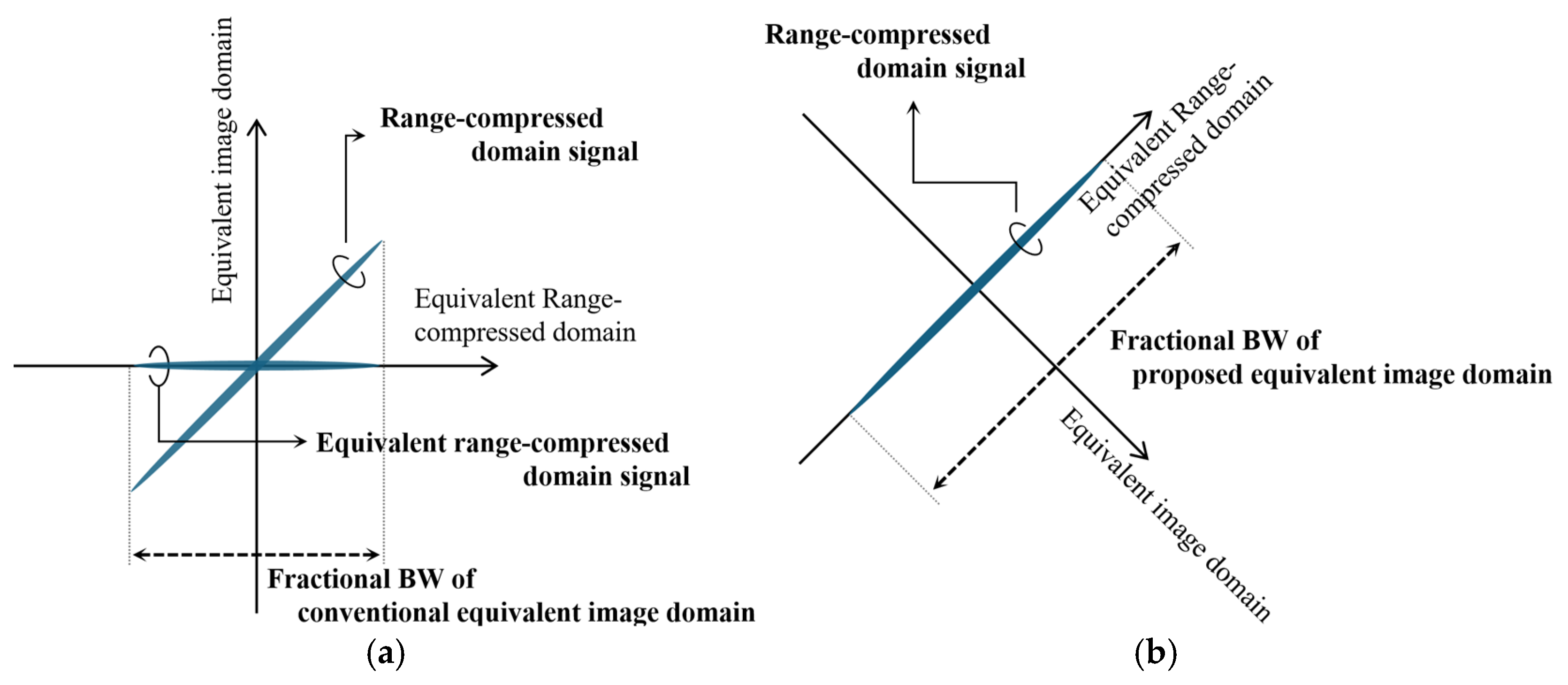
- FrFT-based switching from a stripmap to the spotlight mode: as described in Section 2.2, FrFT is applied to obtain the equivalent image-domain signal with improved resolution and lower PSLR.
- (2)
- Circular shifting: the interested signal is arranged.
- (3)
- Windowing: This step blocks unwanted signals, allowing for accurate phase extraction of the desired signal. The windowed signal in the proposed algorithm exhibits less interference compared to conventional algorithms.
- (4)
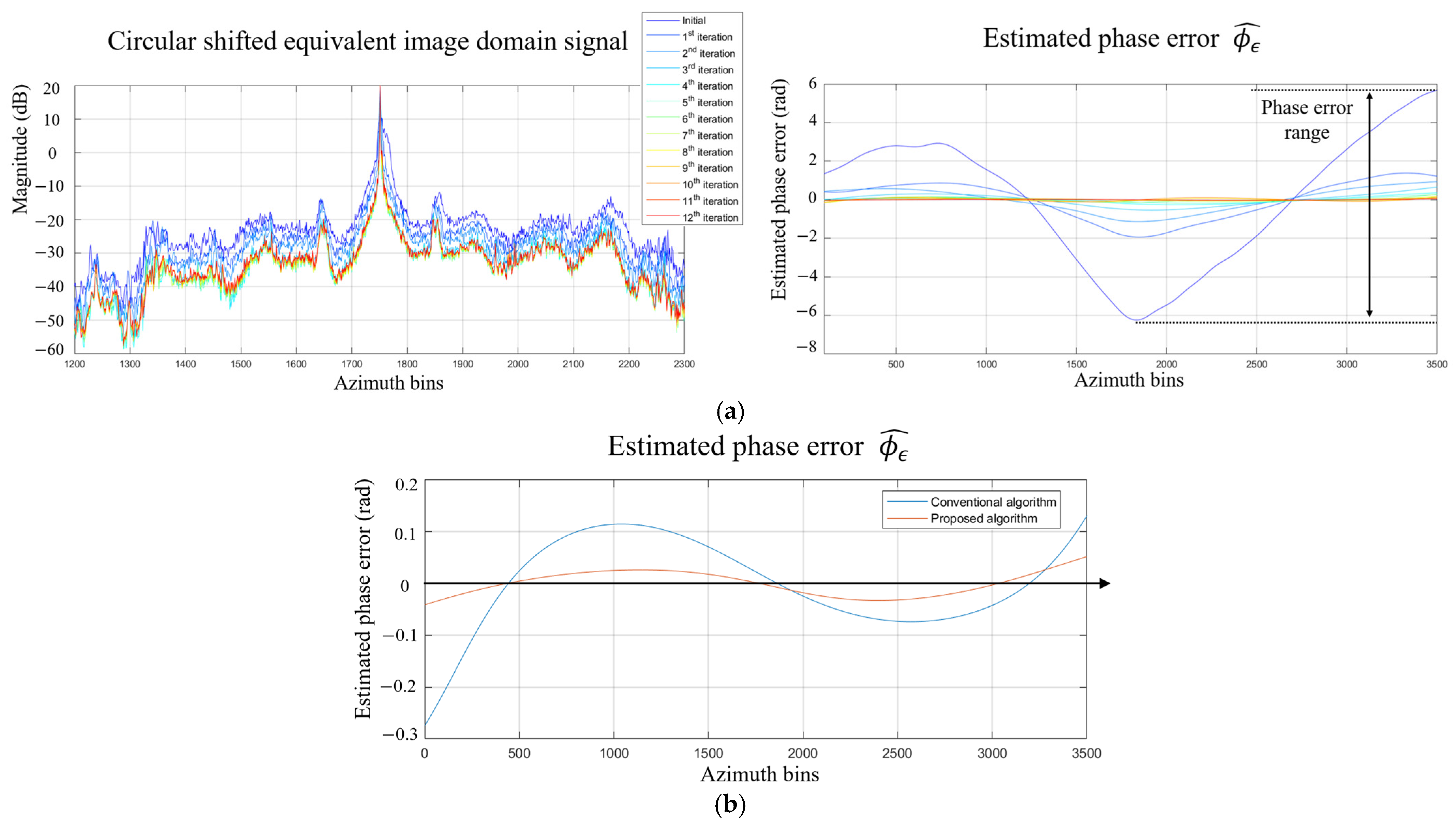
- Phase error estimation and compensation: After widowing, phase error is estimated using Equation (3), and compensation is applied accordingly. Figure 4a illustrates that the proposed algorithm involves performing Steps 2, 3, and 4. By repeatedly executing these steps, the estimated phase error ( gradually decreases. The difference between the maximum and minimum values of the estimated phase error is defined as the phase error range. Table 2 shows the variation of this range. To achieve a phase error range smaller than 0.1 rad, the proposed algorithm requires 11 iterations, whereas the conventional algorithm needs 28 iterations. Figure 4b compares the estimated phase error of the proposed and conventional algorithms at the 11th iteration.
- (5)
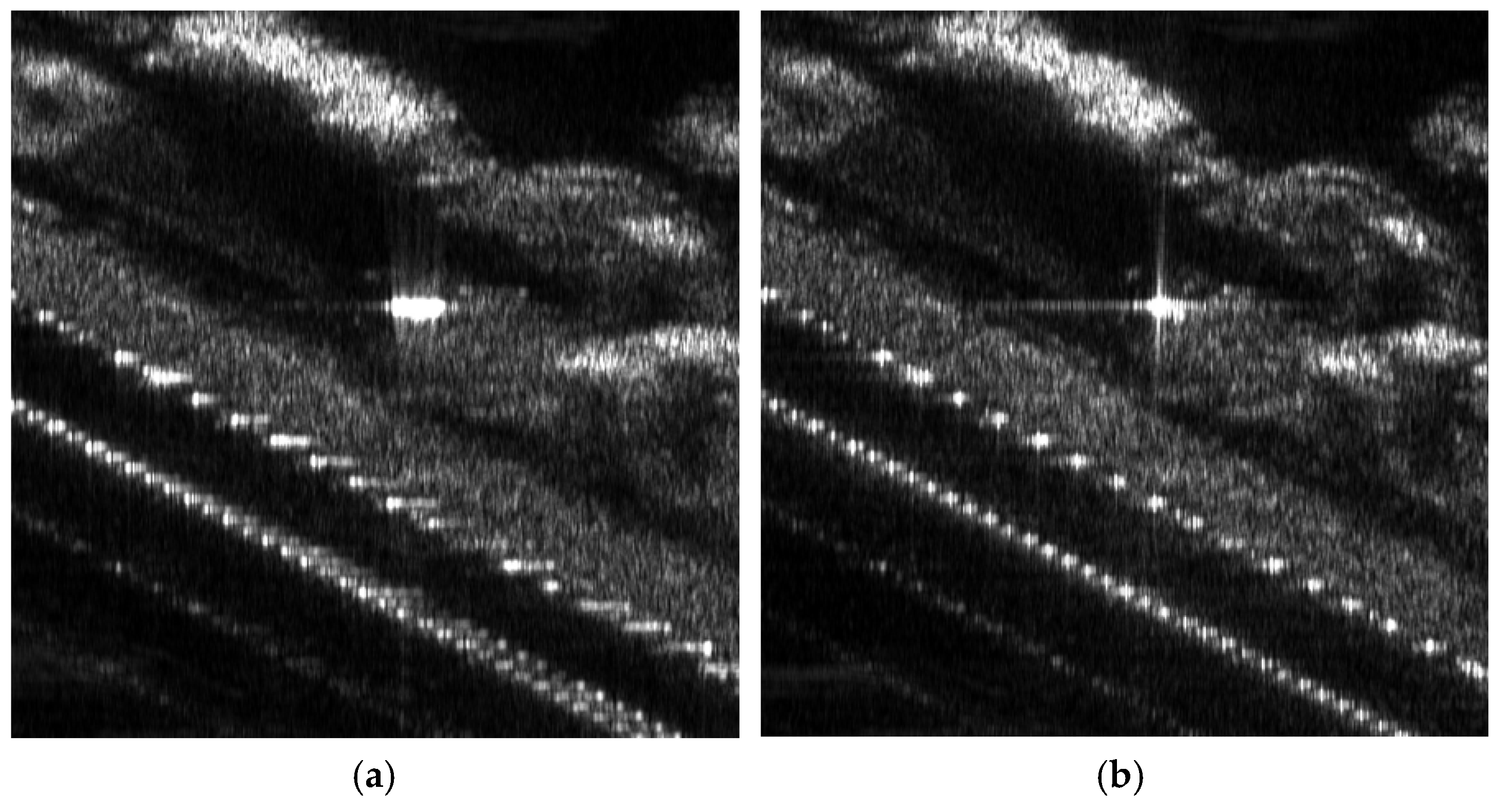
- Final image: The phase error-compensated range-compressed domain signal undergoes azimuth-matched filtering to generate the final autofocused image. Figure 5 presents the final autofocused image obtained using the proposed algorithm.
3.2. With a Moving Target Signal
- (1)
- FrFT-based switch from a stripmap to the spotlight mode: During the FrFT-based switching method, it is determined whether the signal exhibits maximum peak power at the expected rotation angle. This is assessed by comparing the peak power in the current rotation angle with that in adjacent angles.
- (2)
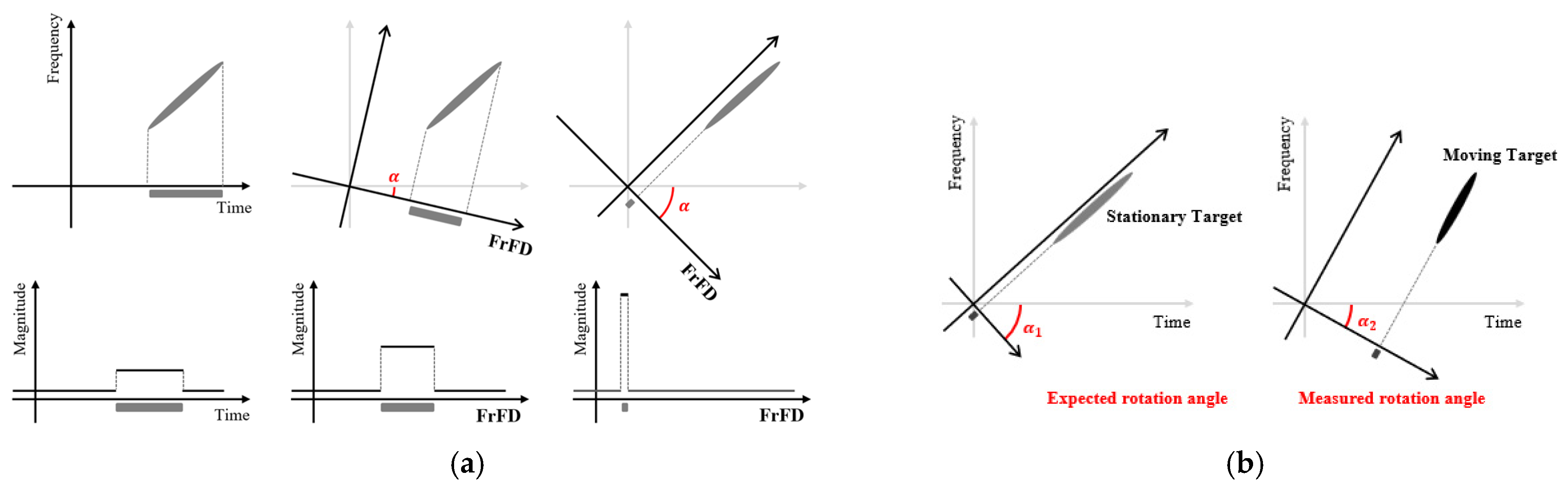
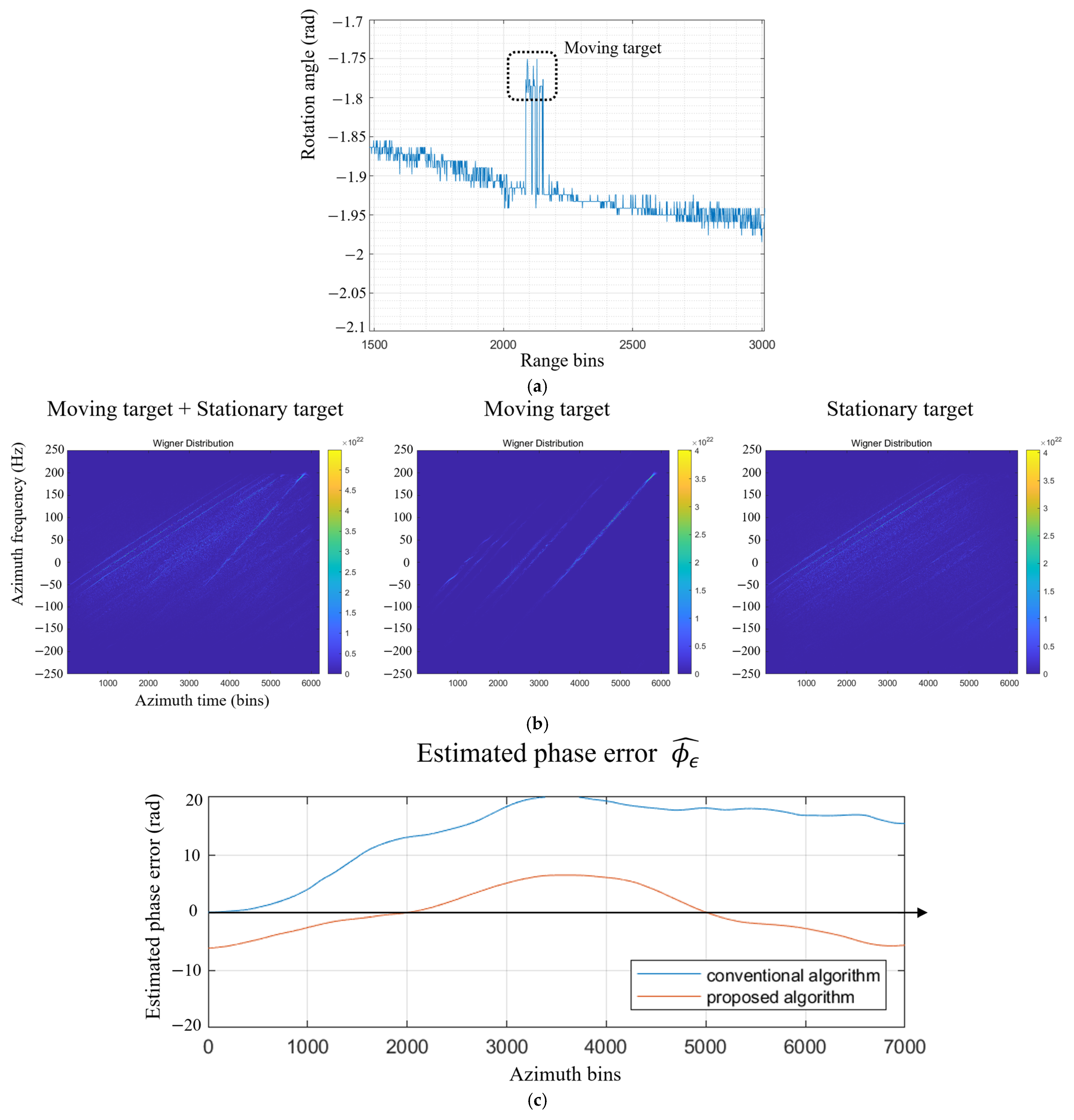
- Finding moving targets: If moving targets are present, they can be detected based on the FrFT-based approach in Section 2.2. As illustrated in Figure 6a, the specific rotation angles at which the maximum peak power occurs differ from those of stationary targets, allowing for the detection of moving targets. Additionally, the specific rotation angle at which the moving target signal exhibits peak power can be identified.
- (3)
- Filtering moving target in FrFD: Moving target filtering is performed at the specific rotation angles identified in Step 2. This process minimizes the loss of surrounding stationary signals while effectively isolating the moving targets. Figure 6b shows the moving target extraction process and result. Through these two steps, the moving targets are detected and extracted, resulting in an equivalent image-domain signal free of moving target interference.
- (4)
- Circular shifting
- (5)
- Widowing
- (6)
- Phase error estimation and compensation: In conventional methods, the presence of moving targets introduces additional phase errors, leading to highly inaccurate phase error estimation. In contrast, the proposed algorithm effectively removes the moving targets, allowing for more precise autofocusing. Figure 6c compares the phase error estimated in the first iteration. It demonstrates that the additional phase error caused by the moving target was effectively managed in the previous stage.
- (7)
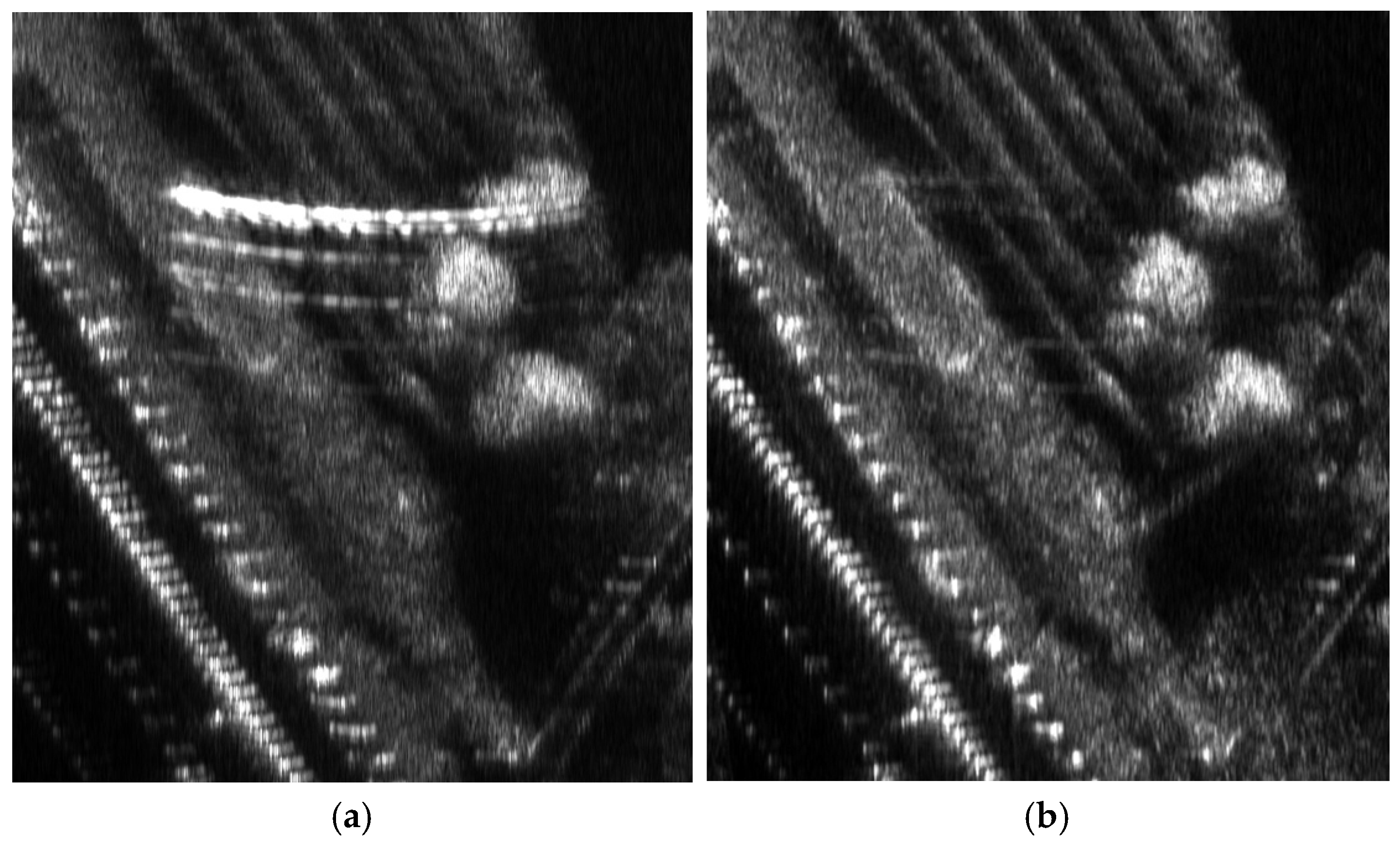
- Final image: Figure 7 presents the final autofocused image obtained using the proposed algorithm. The proposed algorithm effectively eliminates the moving targets, enhancing remote sensing capabilities.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data; Artech House Inc.: London, UK, 2005. [Google Scholar]
- Roh, C.-G.; Kim, J.; Im, I.-J. Analysis of Impact of Rain Conditions on ADAS. Sensors 2020, 20, 6720. [Google Scholar] [CrossRef] [PubMed]
- Argenti, F.; Lapini, A.; Bianchi, T.; Alparone, L. A Tutorial on Speckle Reduction in Synthetic Aperture Radar Images. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–35. [Google Scholar] [CrossRef]
- Fienup, J.R. Phase Error Correction by Shear Averaging. In Signal Recovery and Synthesis III; Technical Digest Series; Optica Publishing Group: Washington, DC, USA, 1989. [Google Scholar]
- Kim, J.-W.; Kim, Y.-D.; Yeo, T.-D.; Khang, S.-T.; Yu, J.-W. Fast Fourier-Domain Optimization Using Hybrid L1−/L p-Norm for Autofocus in Airborne SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7934–7954. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V. Phase gradient autofocus-a robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar]
- Callow, H.J.; Hayes, M.P.; Gough, P.T. Stripmap phase gradient autofocus. In Proceedings of the Oceans 2003. Celebrating the Past... Teaming Toward the Future (IEEE Cat. No.03CH37492), San Diego, CA, USA, 22–26 September 2003; pp. 2414–2421. [Google Scholar]
- Luo, C.; Liang, Y.; Gao, J.; Lei, G.; Han, C. A Scene-Adaptive Phase Gradient Autofocus Algorithm. Remote Sens. 2025, 17, 260. [Google Scholar] [CrossRef]
- Chan, H.L.; Yeo, T.S. Noniterative quality phase-gradient autofocus (QPGA) algorithm for spotlight SAR imagery. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1531–1539. [Google Scholar] [CrossRef]
- Li, Y.; O’Young, S. Kalman Filter Disciplined Phase Gradient Autofocus for Stripmap SAR. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6298–6308. [Google Scholar] [CrossRef]
- Almeida, L.B. The fractional Fourier transform and time-frequency representations. IEEE Trans. Signal Process. 1994, 42, 3084–3091. [Google Scholar] [CrossRef]
- Namias, V. The Fractional Order Fourier Transform and its Application to Quantum Mechanics. IMA J. Appl. Math. 1980, 25, 241–265. [Google Scholar]
- Lu, Q.; Wang, K.; Liu, X. Improved SAR imaging algorithm using FRFT. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Kim, C.K.; Park, M.Y.; Shin, G.H.; Park, S.O. An Improved Technique for Single-Channel Video-SAR Based on Fractional Fourier Transform. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4044–4052. [Google Scholar]
- Feng, L.; HuiFa; Ran, T.; Yue, W. Research on resolution between multi-component LFM signals in the fractional Fourier domain. Sci. China Inf. Sci. 2012, 55, 1301–1312. [Google Scholar]
- Wahl, D.E.; Jakowatz, C.V.; Thompson, P.A.; Ghiglia, D.C. New approach to strip-map SAR autofocus. In Proceedings of the IEEE 6th Digit. Signal Process Workshop, Yosemite National Park, CA, USA, 2–5 October 1994; pp. 53–56. [Google Scholar] [CrossRef]
- Thompson, D.G.; Bates, J.S.; Arnold, D.V. Extending the phase gradient autofocus algorithm for low-altitude stripmap mode SAR. In Proceedings of the IEEE Radar Conference. Radar Into Next Millenn. (Cat. No.99ch36249), Waltham, MA, USA, 22 April 1999; pp. 36–40. [Google Scholar]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Approach for single channel SAR ground moving target imaging and motion parameter estimation. IET Radar Sonar Navig. 2007, 1, 59–66. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 2002, 35, 188–200. [Google Scholar] [CrossRef]
- Ozaktas, H.M.; Barshan, B.; Mendlovic, D.; Onural, L. Convolution, filtering, and multiplexing in fractional Fourier domains and their relation to chirp and wavelet transforms. J. Opt. Soc. Am. A 1994, 11, 547–559. [Google Scholar] [CrossRef]
- Zhu, S.; Liao, G.; Qu, Y.; Zhou, Z.; Liu, X. Ground Moving Targets Imaging Algorithm for Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2011, 49, 462–477. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Value |
|---|---|
| Radar platform | Automobile |
| Platform velocity | 21~22 m/s |
| Operating mode | Strip-map, Pulsed radar |
| Squint angle | |
| Observation height | 60 m |
| Polarization | Single-Pol (Linear) |
| Center frequency | X-band |
| Proposed Algorithm | Conventional Algorithm | ||
|---|---|---|---|
| Iteration | Phase Error Range (Rad) | Iteration | Phase Error Range (Rad) |
| Initial | 11.9321 | Initial | 12.5213 |
| 1 | 3.3226 | 1 | 4.7070 |
| 2~8 | 0.2294~2.0753 | 2~8 | 0.3300~1.9135 |
| 9 | 0.1495 | 9 | 0.3541 |
| 10 | 0.3575 | 10 | 0.3078 |
| 11 | 0.0931 | 11 | 0.4054 |
| 12 | 0.0747 | 12 | 0.3505 |
| - | - | 13~21 | 0.2015~0.4307 (Mean: 0.3225) |
| - | - | 22 | 0.3708 |
| - | - | 23 | 0.3377 |
| - | - | 24 | 0.2618 |
| - | - | 25 | 0.1918 |
| - | - | 26 | 0.1396 |
| - | - | 27 | 0.1057 |
| - | - | 28 | 0.0769 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, K.; Kwon, Y.; Kim, C.K. An Enhanced Phase Gradient Autofocus Algorithm for SAR: A Fractional Fourier Transform Approach. Remote Sens. 2025, 17, 1216. https://doi.org/10.3390/rs17071216
Seo K, Kwon Y, Kim CK. An Enhanced Phase Gradient Autofocus Algorithm for SAR: A Fractional Fourier Transform Approach. Remote Sensing. 2025; 17(7):1216. https://doi.org/10.3390/rs17071216
Chicago/Turabian StyleSeo, Kanghyuk, Yonghwi Kwon, and Chul Ki Kim. 2025. "An Enhanced Phase Gradient Autofocus Algorithm for SAR: A Fractional Fourier Transform Approach" Remote Sensing 17, no. 7: 1216. https://doi.org/10.3390/rs17071216
APA StyleSeo, K., Kwon, Y., & Kim, C. K. (2025). An Enhanced Phase Gradient Autofocus Algorithm for SAR: A Fractional Fourier Transform Approach. Remote Sensing, 17(7), 1216. https://doi.org/10.3390/rs17071216