
Integrating Genetic Algorithm and Geographically Weighted Approaches into Machine Learning Improves Soil pH Prediction in China

Abstract
1. Introduction
2. Materials and Methods
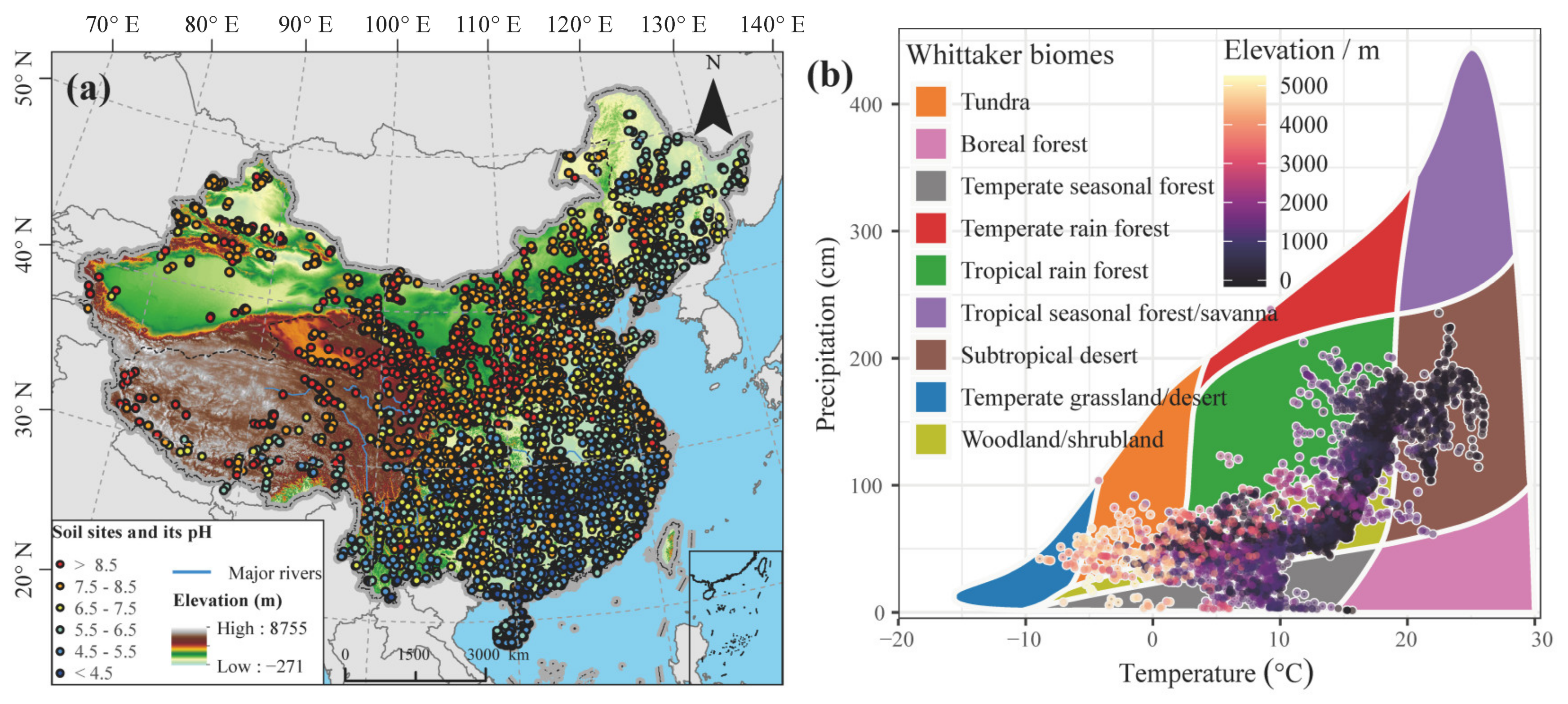
2.1. Soil Data
2.2. Environmental Covariates
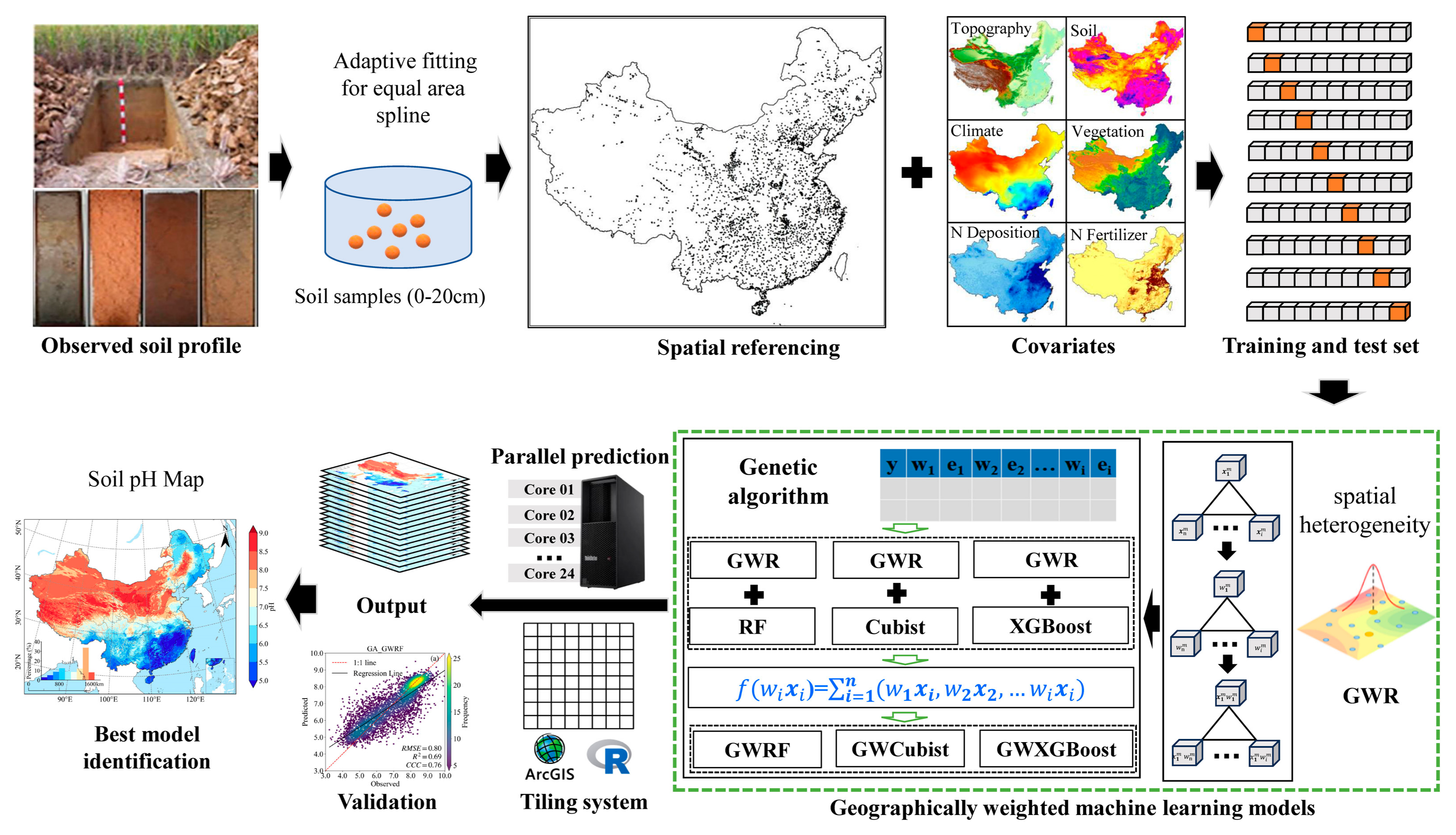
2.3. Methods
2.3.1. Parameter Optimization
2.3.2. Geographically Weighted Random Forest
2.3.3. Geographically Weighted Cubist Model
2.3.4. Geographically Weighted eXtreme Gradient Boosting
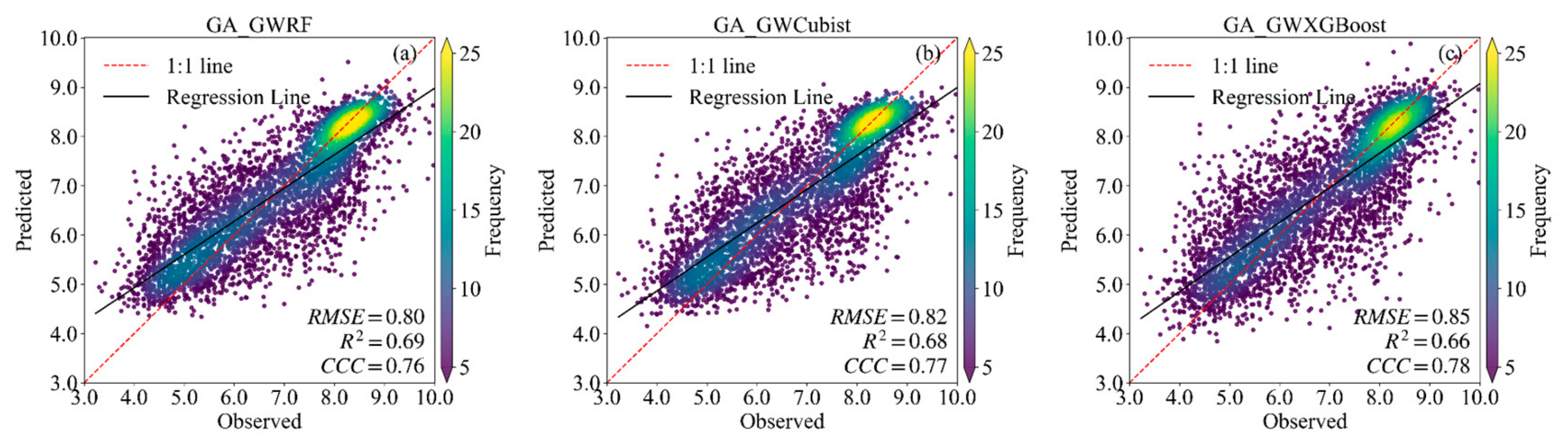
2.4. Evaluation of Model Performance
2.5. Data Processing
3. Results and Analysis
3.1. Statistical Analysis of the Soil pH Data
3.2. Model Performance Comparison
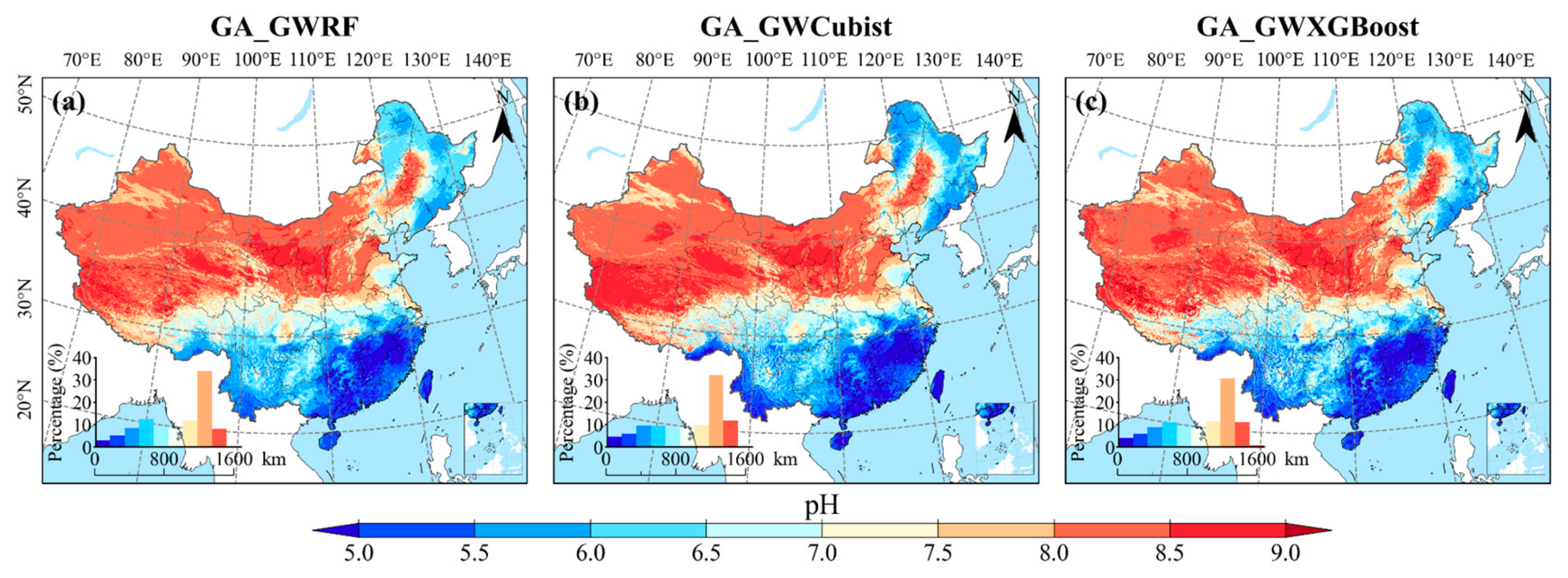
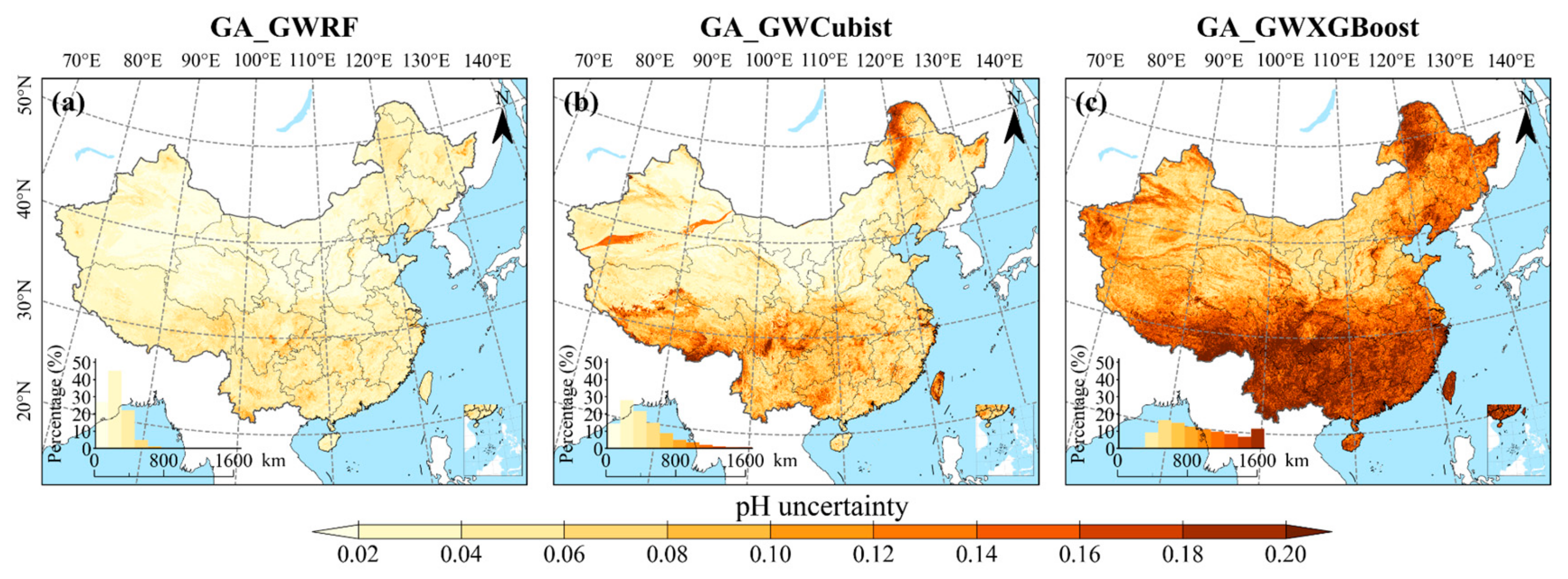
3.3. Spatial Patterns of the Predictions and Their Uncertainty
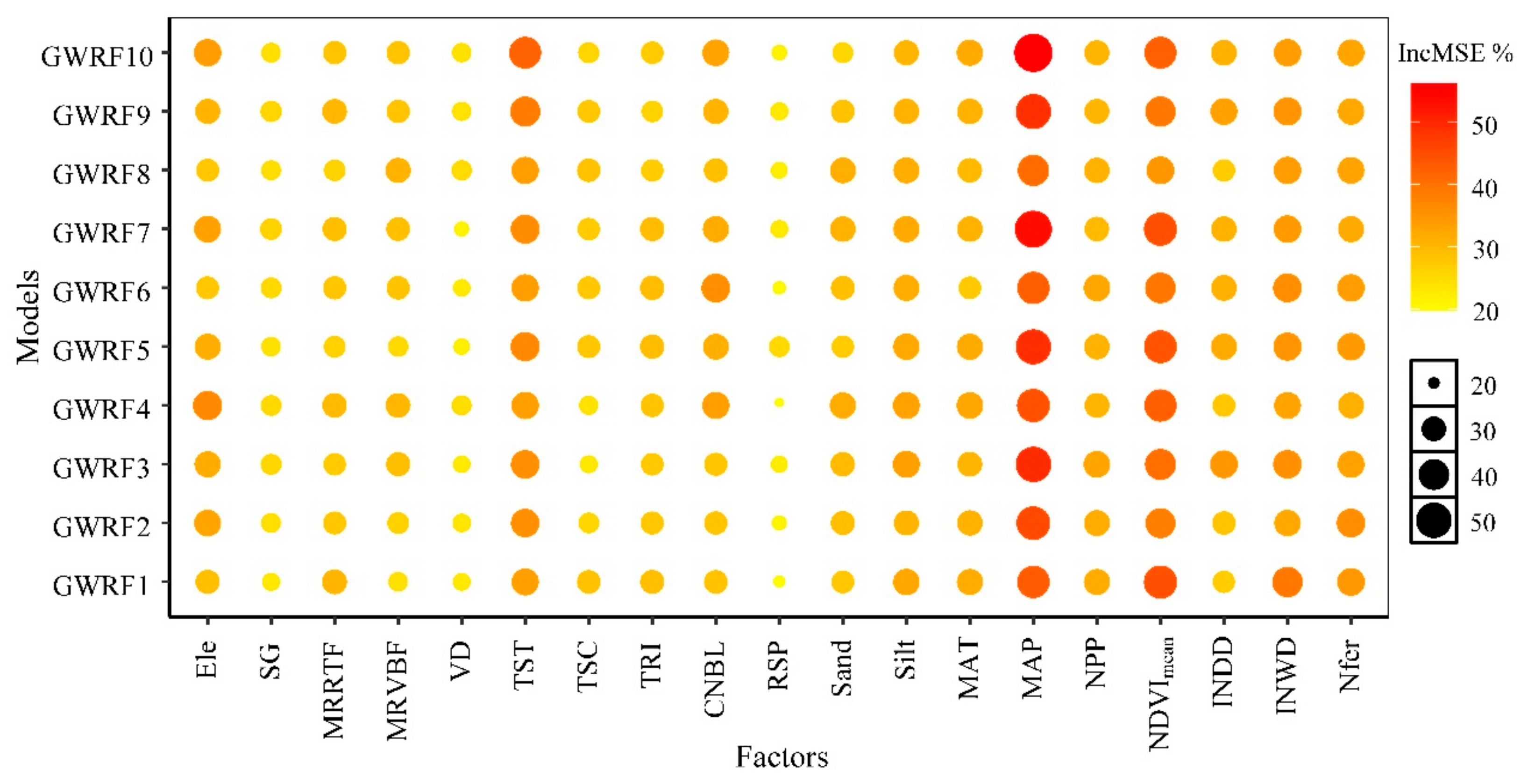
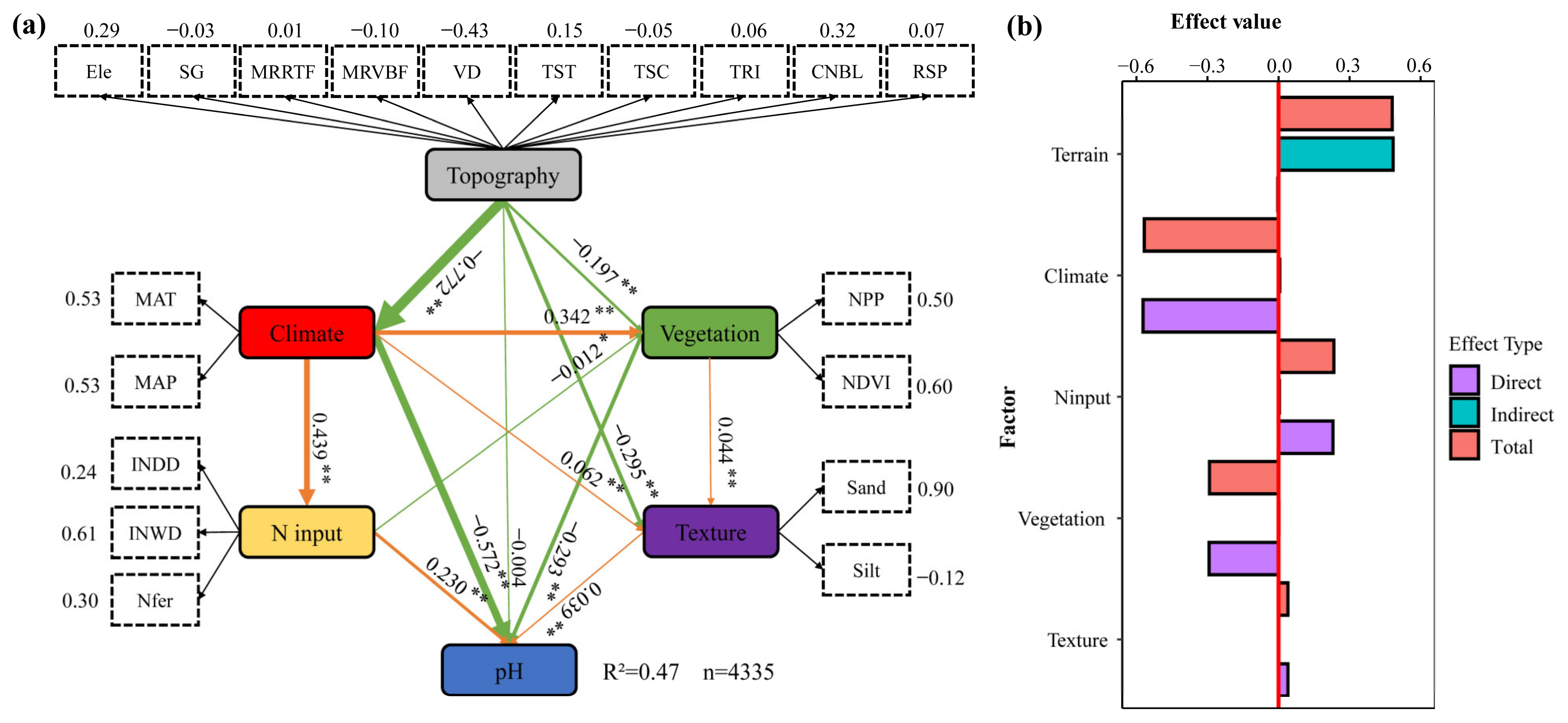
3.4. Environmental Controls on the Spatial Patterns of the Soil pH
4. Discussion
4.1. Comparison of Contemporary Soil pH Mapping Assessments
4.2. Spatial Distribution of Soil pH
4.3. Main Factors Influencing the Spatial Pattern of pH
4.4. Limitations and Further Improvements
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Minasny, B.; Hong, S.Y.; Hartemink, A.E.; Kim, Y.H.; Kang, S.S. Soil pH increase under paddy in South Korea between 2000 and 2012. Agric. Ecosyst. Environ. 2016, 221, 205–213. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B. Digital soil mapping: A brief history and some lessons. Geoderma 2016, 264, 301–311. [Google Scholar] [CrossRef]
- Guo, J.H.; Liu, X.J.; Zhang, Y.; Shen, J.L.; Han, W.X.; Zhang, W.F.; Christie, P.; Goulding, K.W.T.; Vitousek, P.M.; Zhang, F.S. Significant acidification in major Chinese croplands. Science 2010, 327, 1008–1010. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.G. Nutrient Cycling in Red Soils and Their Management; Science Press: Beijing, China, 2002; pp. 137–145. [Google Scholar]
- Liu, X.J.; Guo, K.; Feng, X.H.; Sun, H.Y. Discussion on the agricultural efficient utilization of saline-alkali land resources. Chin. J. Eco-Agric. 2023, 31, 345–353. [Google Scholar]
- Kemmitt, S.; Wright, D.; Goulding, K.; Jones, D. pH regulation of carbon and nitrogen dynamics in two agricultural soils. Soil Biol. Biochem. 2006, 38, 898–911. [Google Scholar] [CrossRef]
- McBratney, A.B.; Santos, M.M.; Minasny, B. On digital soil mapping. Geoderma 2003, 117, 3–52. [Google Scholar] [CrossRef]
- Minasny, B.; McBratney, A.B.; Malone, B.P.; Wheeler, I. Digital mapping of soil carbon. Adv. Agron. 2013, 118, 1–47. [Google Scholar]
- Zhang, G.L.; Liu, F.; Song, X.D. Recent progress and future prospect of digital soil mapping: A review. J. Integr. Agric. 2017, 16, 2871–2885. [Google Scholar] [CrossRef]
- Jemejanova, M.; Kmoch, A.; Uuemaa, E. Adapting machine learning for environmental spatial data—A review. Ecol. Inform. 2024, 81, 102634. [Google Scholar] [CrossRef]
- Were, K.; Bui, D.T.; Dick, Ø.B.; Singh, B.R. A comparative assessment of support vector regression, artificial neural networks, and random forests for predicting and mapping soil organic carbon stocks across an Afromontane landscape. Ecol. Indic. 2015, 52, 394–403. [Google Scholar] [CrossRef]
- Chen, S.; Liang, Z.; Webster, R.; Zhang, G.; Zhou, Y.; Teng, H.; Hu, B.; Arrouays, D.; Shi, Z. A high–resolution map of soil pH in China made by hybrid modelling of sparse soil data and environmental covariates and its implications for pollution. Sci. Total Environ. 2019, 655, 273–283. [Google Scholar] [CrossRef]
- Pouladi, N.; Møller, A.B.; Tabatabai, S.; Greve, M.H. Mapping soil organic matter contents at field level with Cubist, Random Forest and kriging. Geoderma 2019, 342, 85–92. [Google Scholar] [CrossRef]
- Hengl, T.; De Jesus, J.M.; Heuvelink, G.B.M.; Gonzalez, M.R.; Kilibarda, M.; Blagotić, A.; Shangguan, W.; Wright, M.N.; Geng, X.; Bauer-Marschallinger, B.; et al. SoilGrids250m: Global gridded soil information based on machine learning. PLoS ONE 2017, 12, e0169748. [Google Scholar] [CrossRef] [PubMed]
- Chagas, C.D.S.; Junior, W.D.C.; Bhering, S.B.; Calderano, F.B. Spatial prediction of soil surface texture in a semiarid region using random forest and multiple linear regressions. CATENA 2016, 139, 232–240. [Google Scholar] [CrossRef]
- Liu, F.; Wu, H.Y.; Zhao, Y.G.; Li, D.C.; Yang, J.L.; Song, X.D.; Shi, Z.; Zhu, A.X.; Zhang, G.L. Mapping high resolution national soil information grids of China. Sci. Bull. 2022, 67, 328–340. [Google Scholar] [CrossRef]
- Padarian, J.; Minasny, B.; McBratney, A.B. Machine learning and soil sciences: A review aided by machine learning tools. Soil 2019, 6, 35–52. [Google Scholar] [CrossRef]
- Nussbaum, M.; Spiess, K.; Baltensweiler, A.; Grob, U.; Keller, A.; Greiner, L.; Schaepman, M.E.; Papritz, A. Evaluation of digital soil mapping approaches with large sets of environmental covariates. Soil 2017, 4, 1–22. [Google Scholar] [CrossRef]
- Castrignanò, A.; Buttafuoco, G.; Comolli, R.; Castrignanò, A. Using Digital Elevation Model to Improve Soil pH Prediction in an Alpine Doline. Pedosphere 2011, 21, 259–270. [Google Scholar] [CrossRef]
- Zhang, Y.; Sui, B.; Shen, H.O.; Wang, Z.M. Estimating temporal changes in soil pH in the black soil region of Northeast China using remote sensing. Comput. Electron. Agric. 2018, 154, 204–212. [Google Scholar] [CrossRef]
- Ghazali, M.F.; Wikantika, K.; Harto, A.B.; Kondoh, A. Generating Soil Salinity, Soil Moisture, Soil pH from Satellite Imagery and Its Analysis. Inf. Process. Agric. 2020, 7, 294–306. [Google Scholar] [CrossRef]
- Pahlavan-Rad, M.R.; Akbarimoghaddam, A. Spatial variability of soil texture fractions and pH in a flood plain (case study from eastern Iran). CATENA 2018, 160, 275–281. [Google Scholar] [CrossRef]
- Haugen, H.; Devineau, O.; Heggenes, J.; Østbye, K.; Linløkken, A. Predicting habitat properties using remote sensing data: Soil pH and moisture, and ground vegetation cover. Remote Sens. 2022, 14, 5207. [Google Scholar]
- Ye, M.; Zhu, L.; Li, X.; Ke, Y.; Huang, Y.; Chen, B.; Yu, H.; Li, H.; Feng, H. Estimation of the soil arsenic concentration using a geographically weighted XGBoost model based on hyperspectral data. Sci. Total Environ. 2023, 858, 159798. [Google Scholar] [CrossRef]
- Fotheringham, A.S.; Brunsdon, C.A.; Charlton, M.E. Geographically Weighted Regression: The Analysis of Spatially Varying Relationships. Geogr. Anal. 2010, 35, 272–275. [Google Scholar]
- Su, Z.W.; Lin, L.; Xu, Z.H.; Chen, Y.M.; Yang, L.M.; Hu, H.H.; Lin, Z.P.; Wei, S.J.; Luo, S.S. Modeling the effects of drivers on PM2.5 in the Yangtze River Delta with geographically weighted random forest. Remote Sens. 2023, 15, 3826. [Google Scholar] [CrossRef]
- Zhang, G.L.; Wang, Q.B.; Zhang, F.R.; Wu, K.N.; Cai, C.F.; Zhang, M.K.; Li, D.C.; Zhao, Y.G.; Yang, J.L. Criteria for establishment of soil family and soil series in Chinese Soil Taxonomy. Acta Pedol. Sin. 2013, 50, 826–834, (In Chinese with English abstract). [Google Scholar]
- Zhu, J.; He, N.; Wang, Q.; Yuan, G.; Wen, D.; Yu, G.; Jia, Y. The composition, spatial patterns, and influencing factors of atmospheric wet nitrogen deposition in Chinese terrestrial ecosystems. Sci. Total Environ. 2015, 511, 777–785. [Google Scholar] [CrossRef]
- Jia, Y.; Yu, G.; Gao, Y.; He, N.; Wang, Q.; Jiao, C.; Zuo, Y. Global inorganic nitrogen dry deposition inferred from ground– and space–based measurements. Sci. Rep. 2016, 6, 19810. [Google Scholar] [CrossRef]
- Yu, G.; Jia, Y.; He, N.; Zhu, J.; Chen, Z.; Wang, Q.; Piao, S.; Liu, X.; He, H.; Guo, X.; et al. Stabilization of atmospheric nitrogen deposition in China over the past decade. Nat. Geosci. 2019, 12, 424–429. [Google Scholar] [CrossRef]
- Deng, S.; Li, Y.; Wang, J.; Cao, R.; Li, M. A feature-thresholds guided genetic algorithm based on a multi-objective feature scoring method for high-dimensional feature selection. Appl. Soft Comput. 2023, 148, 110765. [Google Scholar] [CrossRef]
- Khaledian, Y.; Miller, B.A. Selecting appropriate machine learning methods for digital soil mapping. Appl. Math. Model. 2020, 81, 401–418. [Google Scholar] [CrossRef]
- Zeraatpisheh, M.; Ayoubi, S.; Jafari, A.; Tajik, S.; Finke, P. Digital mapping of soil properties using multiple machine learning in a semi-arid region, central Iran. Geoderma 2019, 338, 445–452. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Wu, Z.F.; Sun, X.M.; Sun, Y.Q.; Yan, J.Y.; Zhao, Y.F.; Chen, J. Soil acidification and factors controlling topsoil pH shift of cropland in central China from 2008 to 2018. Geoderma 2022, 408, 115586. [Google Scholar] [CrossRef]
- Arrouays, D.; Grundy, M.G.; Hartemink, A.E.; Hempel, J.W.; Heuvelink, G.B.; Hong, S.Y.; Lagacherie, P.; Lelyk, G.; McBratney, A.B.; McKenzie, N.J.; et al. GlobalSoilMap: Toward a fine-resolution global grid of soil properties. Adv. Agron. 2014, 125, 93–134. [Google Scholar]
- Shangguan, W.; Dai, Y.; Liu, B.; Ye, A.; Yuan, H. A soil particle–size distribution dataset for regional land and climate modelling in China. Geoderma 2012, 171, 85–91. [Google Scholar] [CrossRef]
- FAO.; ITPS. Status of the World’s Soil Resources: Main Report; Food and Agriculture Organization of the United Nations and Intergovernmental Technical Panel on Soils: Rome, Italy, 2015. [Google Scholar]
- Liu, F.; Zhang, G.L.; Song, X.; Li, D.; Zhao, Y.; Yang, J.; Wu, H.; Yang, F. High–resolution and three–dimensional mapping of soil texture of China. Geoderma 2019, 361, 114061. [Google Scholar] [CrossRef]
- Zuo, W.; Yi, S.; Gu, B.; Zhou, Y.; Qin, T.; Li, Y.; Shan, Y.; Gu, C.; Bai, Y. Crop residue return and nitrogen fertilizer reduction alleviate soil acidification in China’s croplands. Land Degrad. Dev. 2023, 34, 3144–3155. [Google Scholar] [CrossRef]
- Xie, E.; Zhao, Y.; Li, H.; Shi, X.; Lu, F.; Zhang, X.; Peng, Y. Spatio–temporal changes of cropland soil pH in a rapidly industrializing region in the Yangtze River Delta of China, 1980–2015. Agric. Ecosyst. Environ. 2019, 272, 95–104. [Google Scholar] [CrossRef]
- Geisseler, D.; Scow, K.M. Long-term effects of mineral fertilizers on soil microorganisms—A review. Soil Biol. Biochem. 2014, 75, 54–63. [Google Scholar] [CrossRef]
- Cannone, N.; Guglielmin, M.; Malfasi, F.; Hubberten, H.W.; Wagner, D. Rapid soil and vegetation changes at regional scale in continental Antarctica. Geoderma 2021, 394, 115017. [Google Scholar] [CrossRef]
- Kuang, F.; Liu, X.; Zhu, B.; Shen, J.; Pan, Y.; Su, M.; Goulding, K. Wet and dry nitrogen deposition in the central Sichuan Basin of China. Atmos. Environ. 2016, 143, 39–50. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, L.; Chen, Y.; Liu, X.; Xu, W.; Pan, Y.; Duan, L. Atmospheric nitrogen deposition to China: A model analysis on nitrogen budget and critical load exceedance. Atmos. Environ. 2017, 153, 32–40. [Google Scholar] [CrossRef]
- Liu, X.J.; Mosier, A.R.; Halvorson, A.D.; Reule, C.A.; Zhang, F.S. Dinitrogen and N2O emissions in arable soils: Effect of tillage, N source and soil moisture. Soil Biol. Biochem. 2007, 39, 2362–2370. [Google Scholar] [CrossRef]
- Tian, D.; Niu, S. A global analysis of soil acidification caused by nitrogen addition. Environ. Res. Lett. 2015, 10, 024019. [Google Scholar] [CrossRef]
- Yu, J.; Li, Y.; Han, G.; Zhou, D.; Fu, Y.; Guan, B.; Wang, G.; Ning, K.; Wu, H.; Wang, J. The spatial distribution characteristics of soil salinity in coastal zone of the Yellow River Delta. Environ. Earth Sci. 2014, 72, 589–599. [Google Scholar] [CrossRef]
- Peng, J.; Biswas, A.; Jiang, Q.; Zhao, R.; Hu, J.; Hu, B.; Shi, Z. Estimating soil salinity from remote sensing and terrain data in southern Xinjiang Province, China. Geoderma 2019, 337, 1309–1319. [Google Scholar] [CrossRef]
- Liu, Z.P.; Shao, M.A.; Wang, Y.Q. Large–scale spatial interpolation of soil pH across the Loess Plateau, China. Environ. Earth Sci. 2013, 69, 2731–2741. [Google Scholar] [CrossRef]
- Müller, T.S.; Dechow, R.; Flessa, H. Inventory and assessment of pH in cropland and grassland soils in Germany. J. Plant Nutr. Soil Sci. 2022, 185, 145–158. [Google Scholar] [CrossRef]
- Zhang, Q.Y.; Zhu, J.X.; Wang, Q.F.; Xu, L.; Li, M.; Dai, G.H.; Mulder, J.; He, N.P. Soil acidification in China’s forests due to atmospheric acid deposition from 1980 to 2050. Sci. Bull. 2022, 67, 914–917. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, B.; Zhang, J.; Müller, C.; Cai, Z. Mechanisms of soil N dynamics following long–term application of organic fertilizers to subtropical rain–fed purple soil in China. Soil Biol. Biochem. 2015, 91, 222–231. [Google Scholar] [CrossRef]
- Li, Q.; Luo, Y.; Wang, C.; Li, B.; Zhang, X.; Yuan, D.; Gao, X.; Zhang, H. Spatiotemporal variations and factors affecting soil nitrogen in the purple hilly area of Southwest China during the 1980s and the 2010s. Sci. Total Environ. 2016, 547, 173–181. [Google Scholar] [CrossRef] [PubMed]
- Gray, J.M.; Bishop, T.F.; Wilford, J.R. Lithology and soil relationships for soil modelling and mapping. CATENA 2016, 147, 429–440. [Google Scholar] [CrossRef]
- Fujii, K.; Hayakawa, C.; Panitkasate, T.; Maskhao, I.; Funakawa, S.; Kosaki, T.; Nawata, E. Acidification and buffering mechanisms of tropical sandy soil in northeast Thailand. Soil Tillage Res. 2017, 165, 80–87. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Covariates | Abbreviation | Resolution |
|---|---|---|---|
| Topography | Elevation | Ele | 30 m |
| Slope gradient | SG | ||
| Multiresolution of ridge top flatness index | MRRTF | ||
| Multiresolution Valley Bottom Flatness Index | MRVBF | ||
| Terrain surface texture | TST | ||
| Terrain Ruggedness Index | TRI | ||
| Terrain surface convexity | TSC | ||
| Channel Distance Base Level | CNBL | ||
| Valley depth | VD | ||
| Soil | Sand content | Sand | |
| Silt content | Silt | 250 m | |
| Clay content | Clay | ||
| Climate | Mean Annual Temperature | MAT | 1 km |
| Mean Annual Precipitation | MAP | ||
| Vegetation | Mean Normalized Difference Vegetation Index | NDVImean | 250 m |
| Net Primary Productivity | NPP | 1 km | |
| N input | Inorganic nitrogen dry deposition | INDD | 10 km |
| Inorganic nitrogen wet deposition | INWD | 1 km | |
| Fertilizer (nitrogen) | Nfer | 5 km |
| Models | ML | GWR | ||
|---|---|---|---|---|
| RIRMSE | RIR² | RIRMSE | RIR² | |
| GWRF | 2.14 | 1.98 | 11.55 | 14.29 |
| GWCubist | 2.66 | 2.78 | 9.43 | 11.82 |
| GWXGBoost | 1.81 | 2.04 | 6.38 | 8.61 |
| Dataset | Fitted Models | Nugget (C0) | Sill (C0 + C) | Nugget Ratio (%) | Range (A0)/km | R2 | RSS |
|---|---|---|---|---|---|---|---|
| All data | spherical | 0.73 | 2.51 | 29.03 | 1878.00 | 0.99 | 0.04 |
| train1 | spherical | 0.72 | 2.53 | 28.23 | 1872.00 | 0.99 | 0.04 |
| train2 | spherical | 0.73 | 2.51 | 28.90 | 1880.00 | 0.99 | 0.04 |
| train3 | spherical | 0.72 | 2.48 | 29.11 | 1840.00 | 0.99 | 0.04 |
| train4 | spherical | 0.75 | 2.50 | 30.20 | 1868.00 | 0.99 | 0.04 |
| train5 | spherical | 0.73 | 2.51 | 29.02 | 1880.00 | 0.99 | 0.04 |
| train6 | spherical | 0.71 | 2.54 | 27.82 | 1889.00 | 0.99 | 0.05 |
| train7 | spherical | 0.75 | 2.50 | 30.08 | 1897.00 | 0.99 | 0.03 |
| train8 | spherical | 0.71 | 2.48 | 28.47 | 1837.00 | 0.99 | 0.04 |
| train9 | spherical | 0.75 | 2.50 | 29.97 | 1905.00 | 0.99 | 0.03 |
| train10 | spherical | 0.71 | 2.54 | 27.79 | 1911.00 | 0.99 | 0.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Ji, J.; Li, B.; Deng, X.; Xu, M. Integrating Genetic Algorithm and Geographically Weighted Approaches into Machine Learning Improves Soil pH Prediction in China. Remote Sens. 2025, 17, 1086. https://doi.org/10.3390/rs17061086
Zhang W, Ji J, Li B, Deng X, Xu M. Integrating Genetic Algorithm and Geographically Weighted Approaches into Machine Learning Improves Soil pH Prediction in China. Remote Sensing. 2025; 17(6):1086. https://doi.org/10.3390/rs17061086
Chicago/Turabian StyleZhang, Wantao, Jingyi Ji, Binbin Li, Xiao Deng, and Mingxiang Xu. 2025. "Integrating Genetic Algorithm and Geographically Weighted Approaches into Machine Learning Improves Soil pH Prediction in China" Remote Sensing 17, no. 6: 1086. https://doi.org/10.3390/rs17061086
APA StyleZhang, W., Ji, J., Li, B., Deng, X., & Xu, M. (2025). Integrating Genetic Algorithm and Geographically Weighted Approaches into Machine Learning Improves Soil pH Prediction in China. Remote Sensing, 17(6), 1086. https://doi.org/10.3390/rs17061086