
A Preliminary Assessment of the VIIRS Cloud Top and Base Height Environmental Data Record Reprocessing





Abstract
1. Introduction
2. Retrieval Algorithm of VIIRS CTH and CBH EDR
2.1. VIIRS Cloud Top Height Retrieval
2.2. VIIRS Cloud Base Height Retrieval
3. Datasets
3.1. SNPP VIIRS Dataset
3.2. CloudSat-CPR and CALIPSO-Lidar Estimations
3.3. Ancillary Data
4. Assessment Methodology
4.1. Quality Control
- (1)
- Pixels with any out-of-range values and poor quality assigned by the quality flags for all the cloud properties are excluded from the comparison. These properties include VIIRS CTH, CBH and COT retrievals, and CloudSat-CALIPSO CTH and CBH measurements.
- (2)
- In contrast to active sensors such as CloudSat-Radar and CALIPSO-Lidar, which can capture the vertical structures and overlaps of cloud systems, VIIRS is less effective at measuring the properties of multi-layer clouds. Therefore, only single-layer clouds are included in the evaluation and comparison of CTH algorithms.
- (3)
- Since the quality of the upstream CTH product is critical for CBH retrieval, this paper follows the quality control strategy adopted by the VIIRS CBH algorithm development team in the CBH quality evaluation: only the cloudy pixels where the CTH differences between VIIRS and CloudSat-CALIPSO are smaller than 2 km when COT < 1 and smaller than 1 km when COT > 1 are included in CBH evaluations [20].
- (4)
- To avoid ground cluster contamination, pixels with CBH lower than 1000 m in both VIIRS and CloudSat-CALIPSO data are not considered in the assessment [32].
- (5)
- Since the VIIRS CBH retrieval algorithm is based on an estimation of the height of the base of the topmost cloud layer above mean sea level, the CBH of the topmost layer in the CloudSat-CALIPSO products will be used in the evaluation.
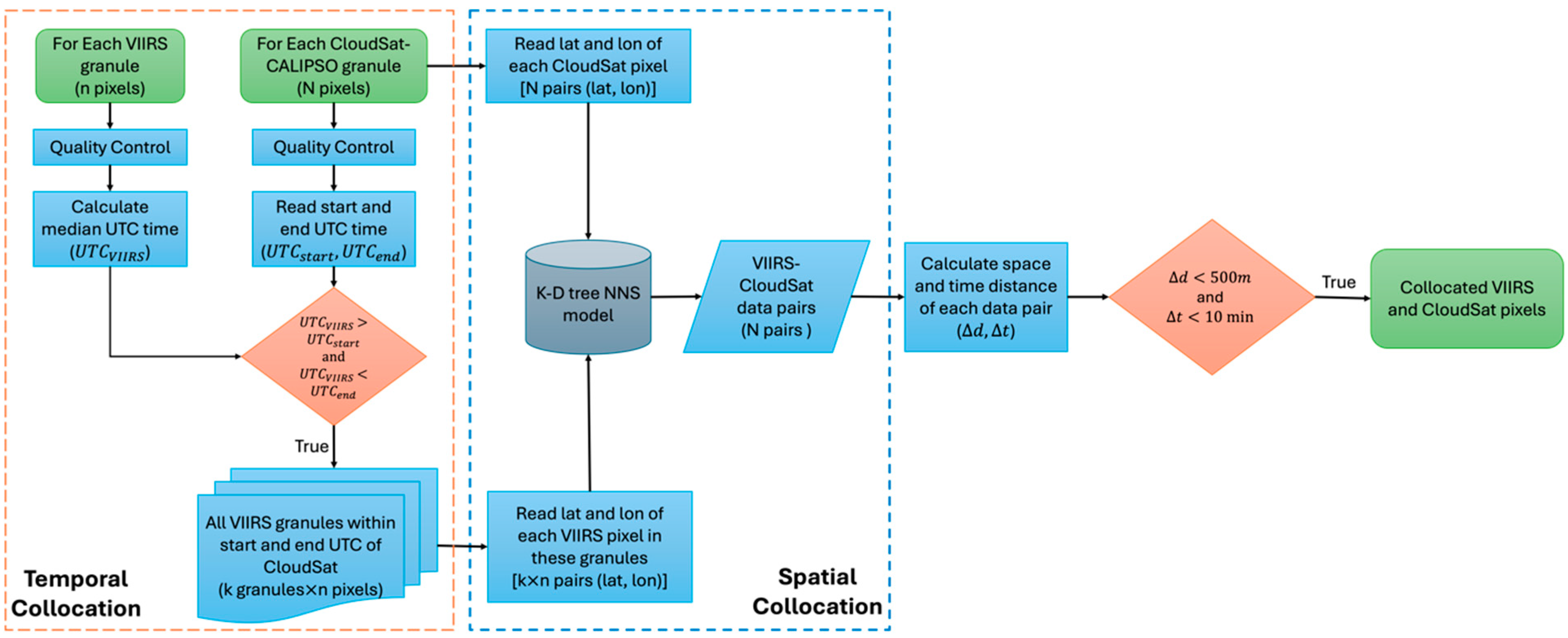
4.2. Spatiotemporal Collocation Between SNPP-VIIRS and CloudSat-CALIPSO Dataset
- (1)
- For each CloudSat granule, retrieve the start and end time from the dataset.
- (2)
- Search for all the VIIRS granules that have a median scanning time within the starting and ending time frame of each respective CloudSat granule.
- (3)
- For each pixel in this Cloudsat granule, the collocation framework identifies a VIIRS pixel within the VIIRS-granule pool formed in the second step that has the nearest spatial distance with this CloudSat pixel using the nearest neighbor search (NNS) algorithm based on the K-Dimensional (K-D) Tree model [33,34]. This search algorithm identifies the pixel that is nearest to the given input point in a binary tree structure, considering the pixel longitude and latitude values.
- (4)
- Calculate the spatial and temporal difference between each VIIRS and CloudSat pixel pair based on their longitude and latitude information.
- (5)
- In the last step, a spatiotemporal filter is applied to every CloudSat-VIIRS pixel pair, and all the pairs with spatiotemporal distances exceeding a defined threshold are excluded from the comparison. In this study, the temporal and spatial thresholds are set to be 10 min and 500 m considering the pixel size of VIIRS (750 m) and typical movement speed of clouds (~800 m/min, [35]). Thus, both the thresholds are widely adopted in previous cloud height evaluations [36,37,38].
4.3. Evaluation Metrics
5. Results
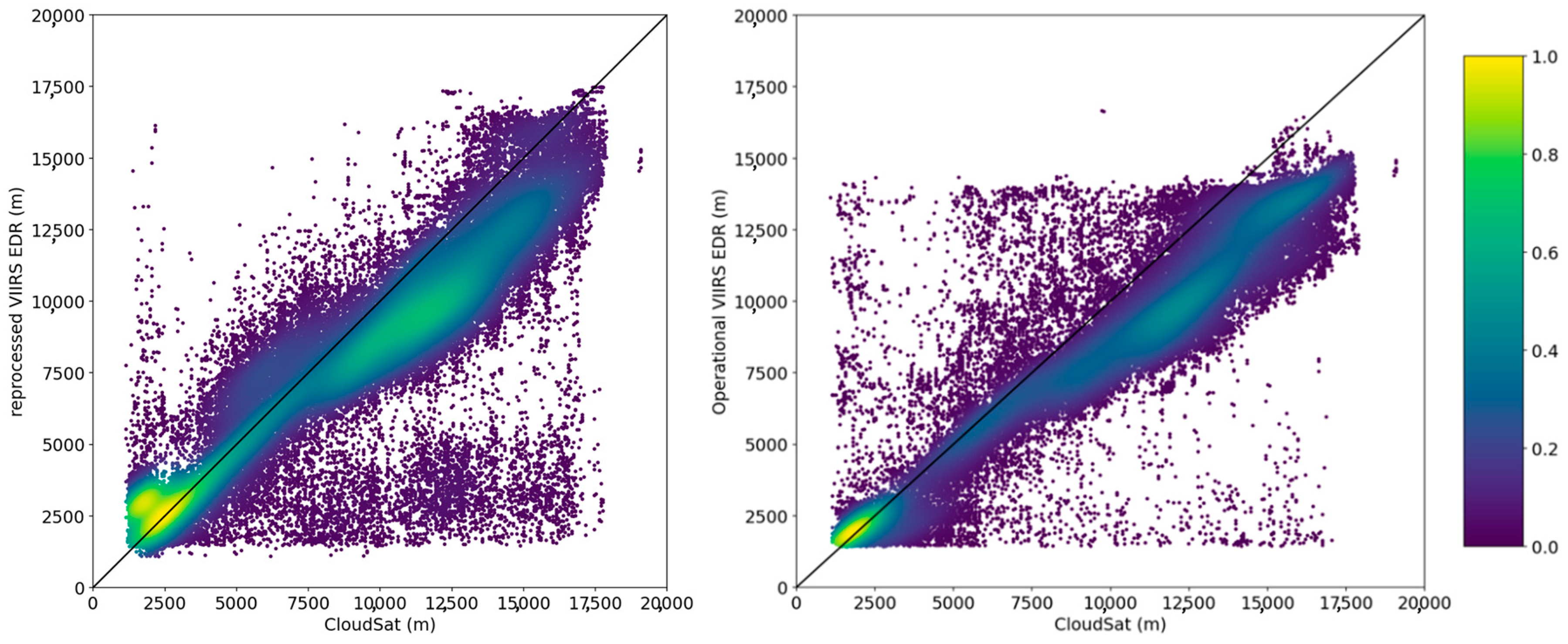
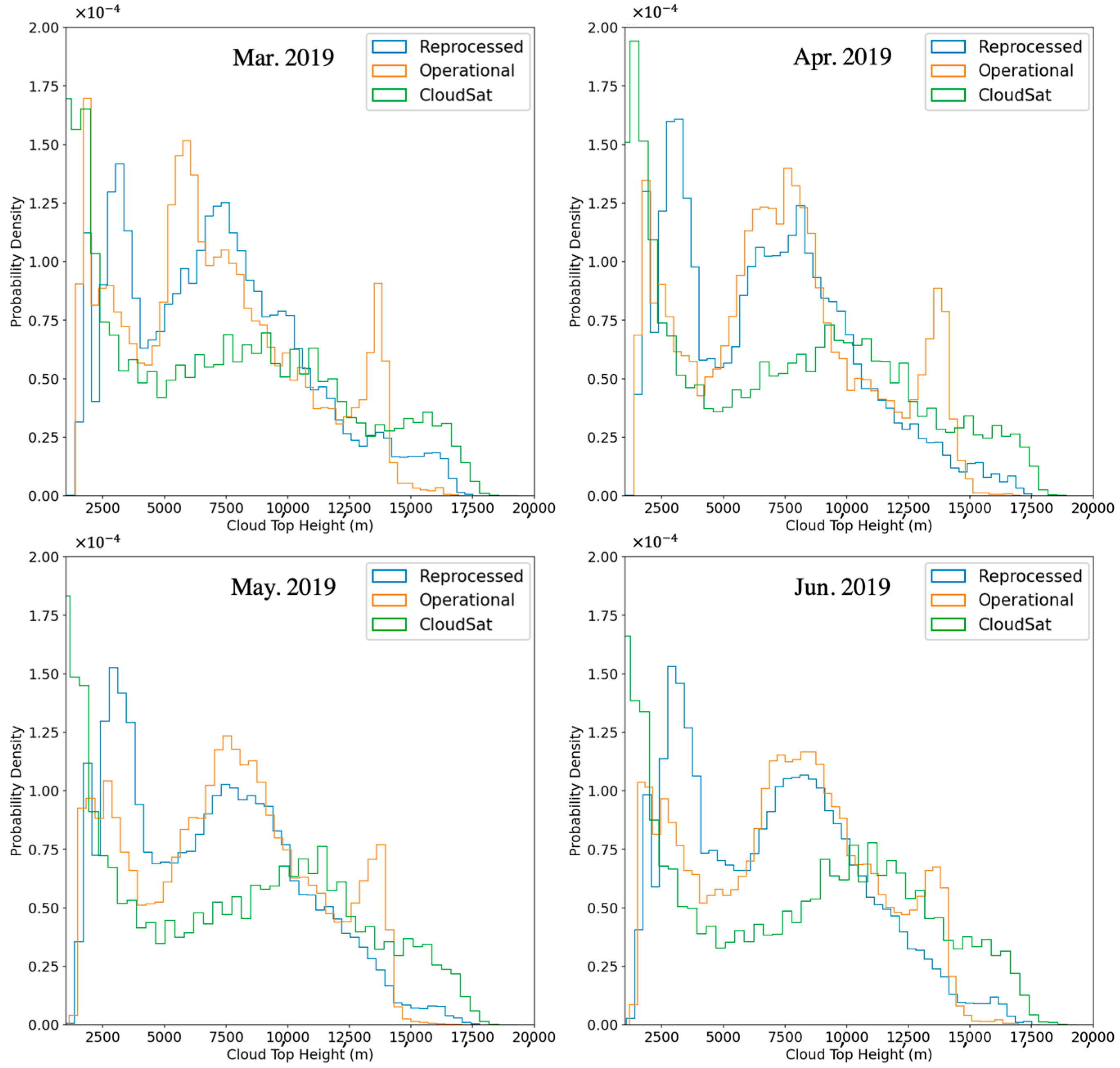
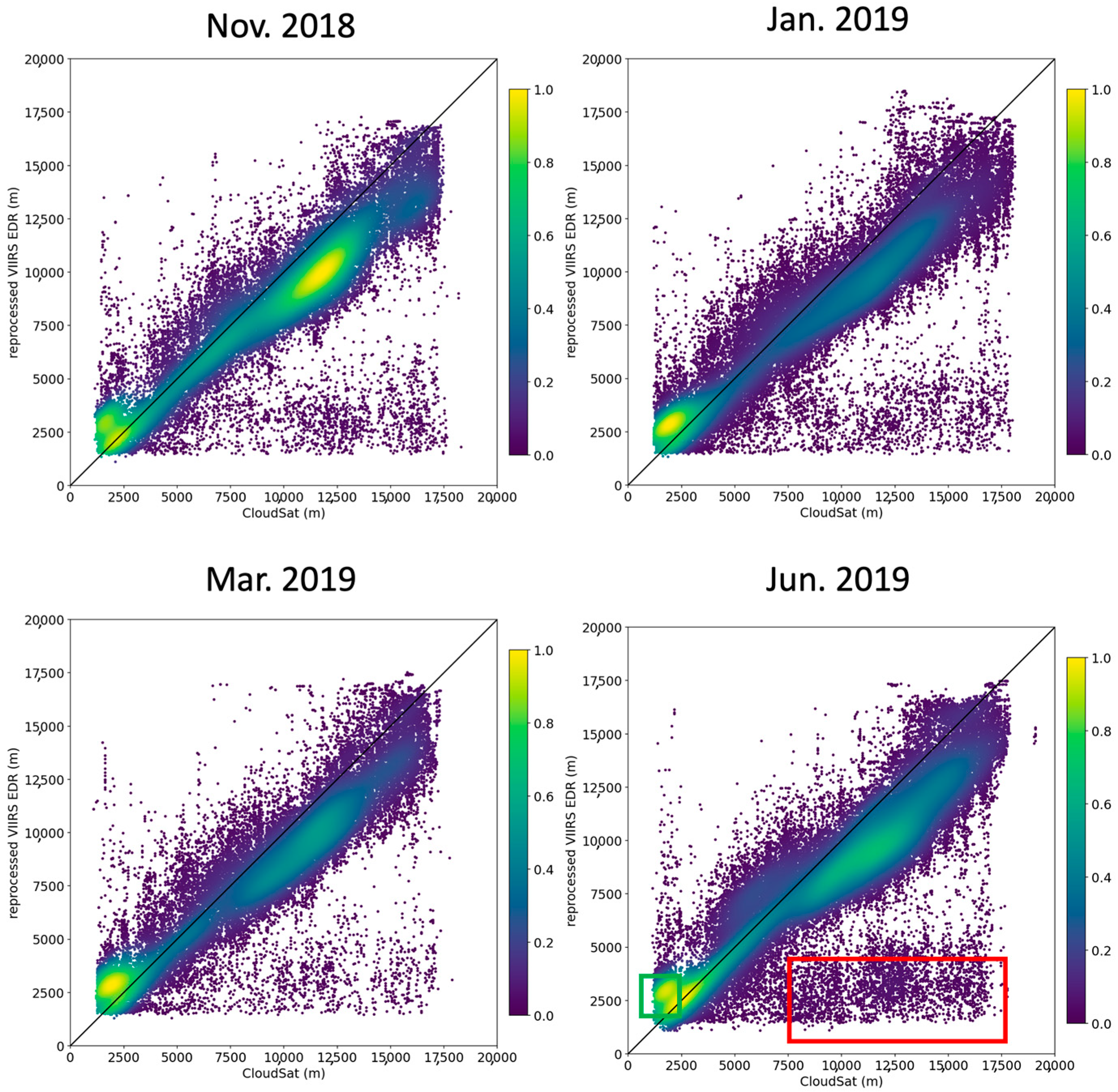
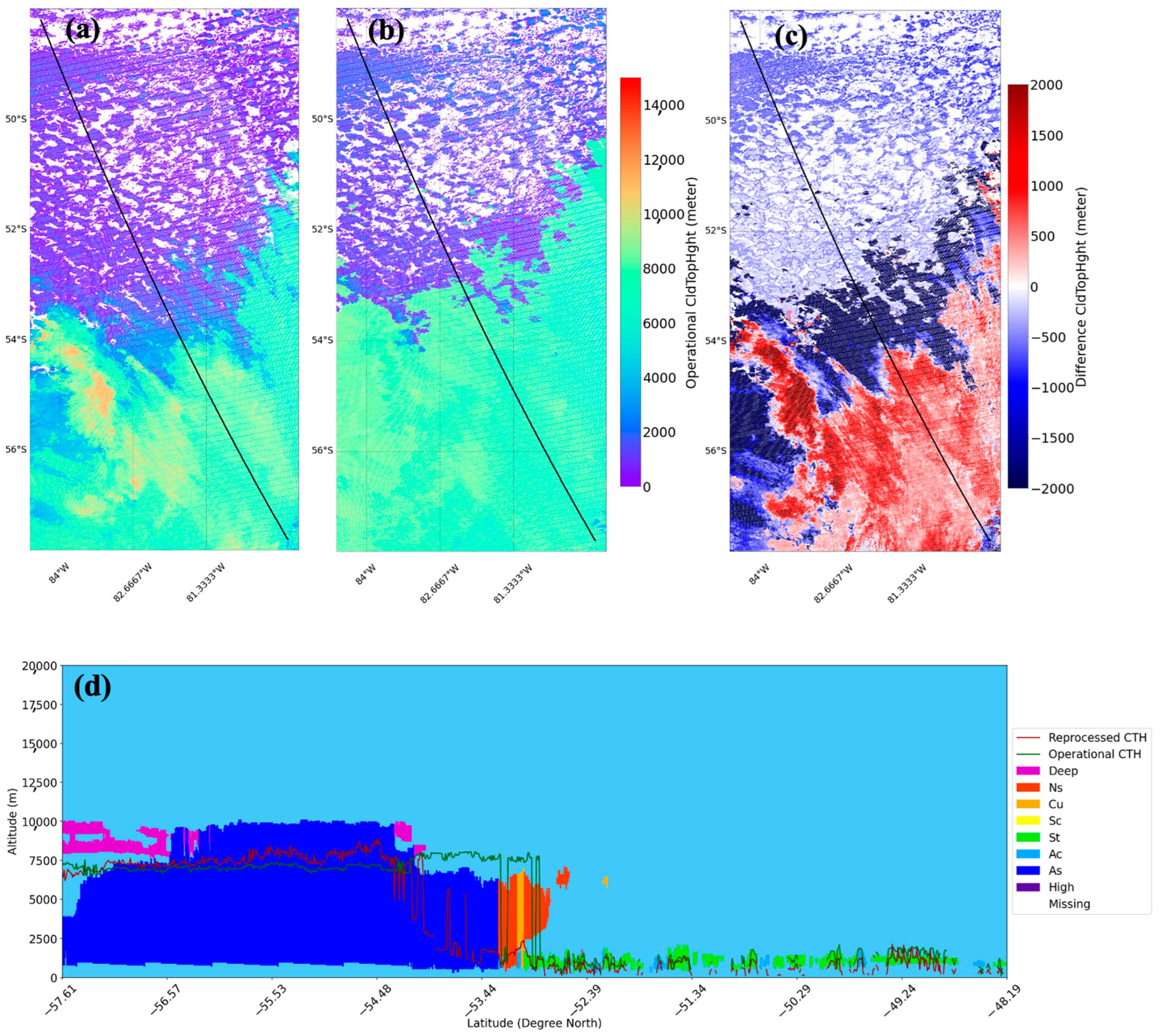
5.1. Cloud Top Height
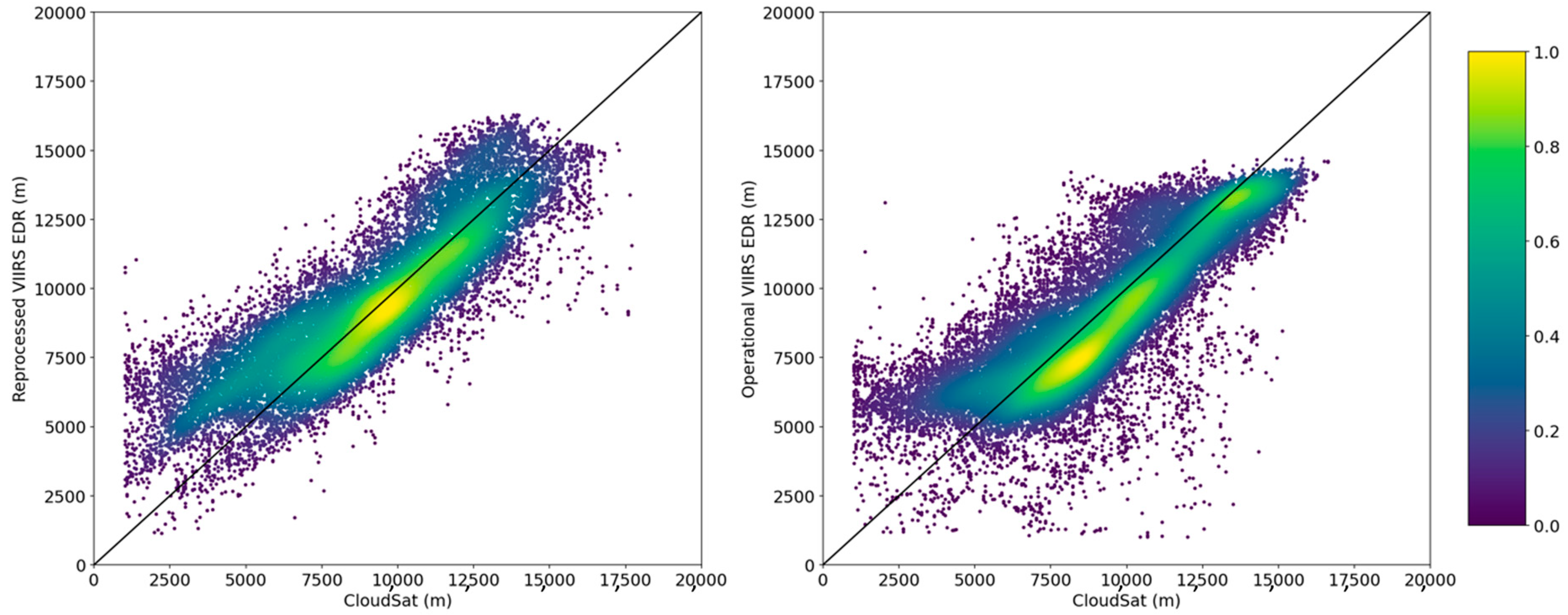
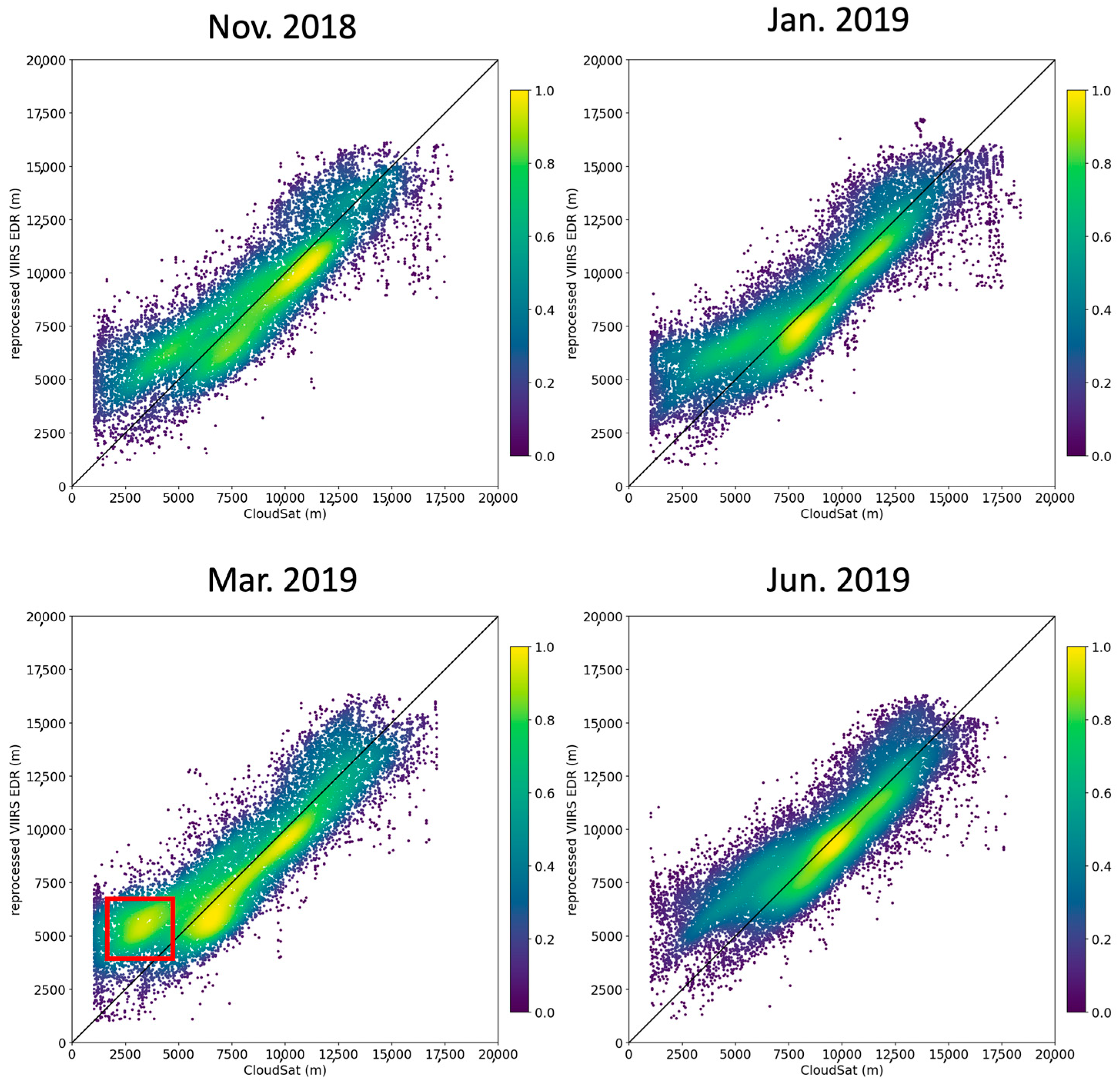
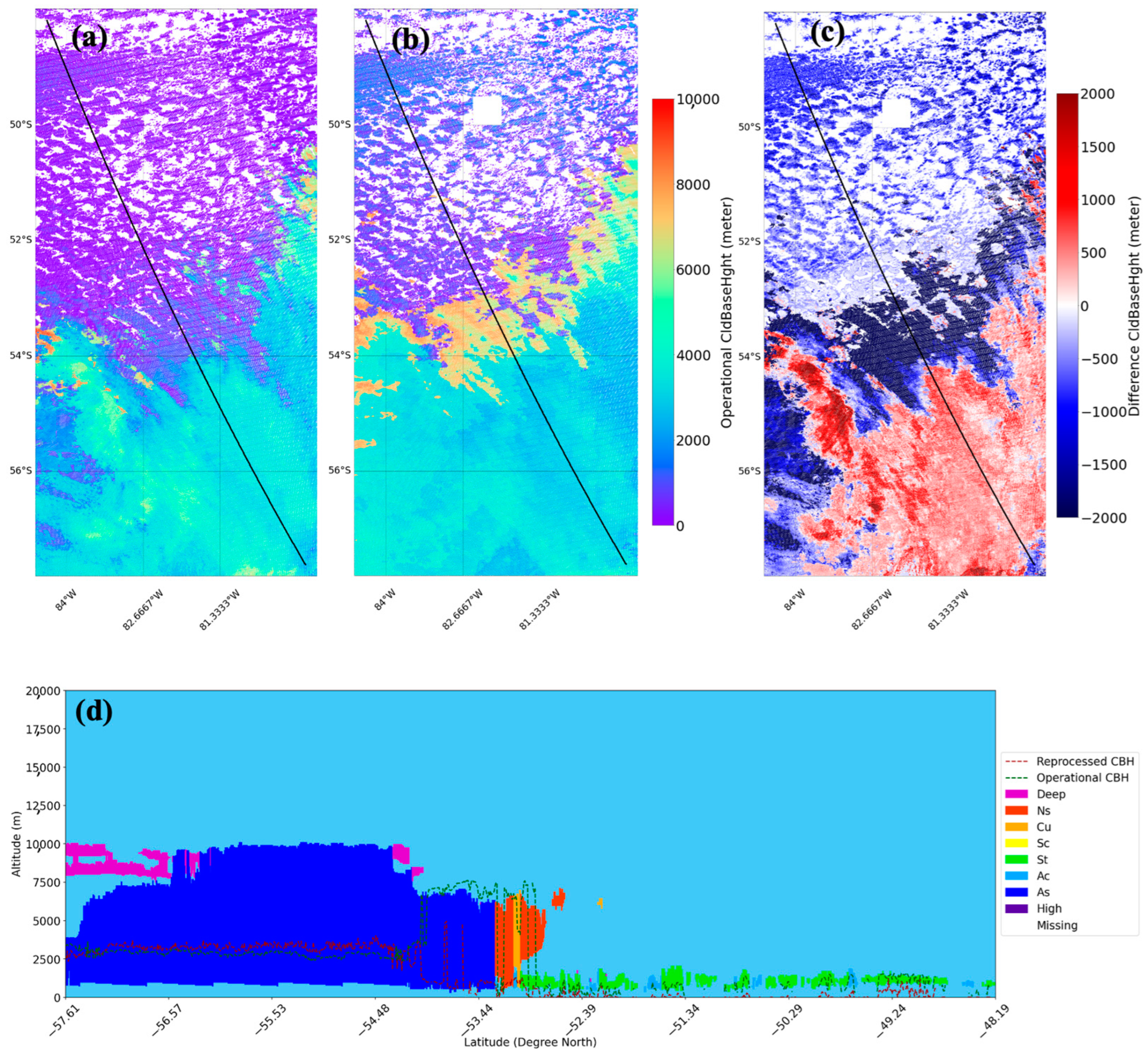
5.2. Cloud Base Height
6. Discussion
- (1)
- The reprocessed VIIRS CTH EDRs show relatively high quality for single-layer clouds, which is comparable to the operational data, with enhanced retrieval accuracy for high-top clouds, particularly those above 15 km.
- (2)
- With quality controls on upstream CTH retrievals, the reprocessed CBH product demonstrates higher correlations and fewer outliers compared to CloudSat-CALIPSO measurements than the operational data across all overlapping periods.
- (3)
- The new VIIRS CBH algorithm enhances the retrieval of very high CBH values above 13 km compared to the operational data, but it is less accurate in estimating low CTH values. This could be due to the upgrade in the microphysical index (β) fitting method from a linear to a higher-order polynomial, which provides more degrees of freedom and leads to overfitting. The overfitting results in increased fluctuations when estimating low CTH values.
- (4)
- Both the reprocessed VIIRS CTH and CBH EDRs exhibit greater sensitivity to the boundary regions of different cloud heights and are more effective in detecting and representing these dynamics in adjacent clouds. However, ground signals tend to have a stronger influence on the new CBH algorithm over these boundary areas, introducing more fluctuations in the cloud height estimations produced by the reprocessing algorithm.
- (5)
- Both reprocessed and operational cloud height products show lower accuracies and greater uncertainties over multi-layer clouds observed by the active sensors of the CloudSat-CALIPSO system. This is understandable given the limited capability of passive remote sensing sensors to penetrate the internal structures of cloud systems.
- (6)
- The reprocessed CTH data tend to underestimate high cloud tops and overestimate low cloud tops. The underestimation of high CTH is largely due to active sensors being more sensitive to the tops of very high and optically thin clouds, whereas passive IR sensors have limitations to detect these tenuous uppermost layers. Additionally, emissions from lower atmospheric layers beneath high clouds can cause the cloud-top temperature detected by IR sensors to be higher than the actual cloud-top temperature, leading the algorithm to assign a lower CTH. On the other hand, the overestimation of low CTH may be due to the limited capability of passive sensors like VIIRS to accurately estimate the features of optically thick clouds.
- (7)
- The parallax issue also introduces bias in the comparison between VIIRS and CloudSat-CALIPSO data by causing a displacement between cloud observations in the two datasets. This occurs because passive sensors like VIIRS observe clouds at an angle rather than directly from above, resulting in a shift in the detected cloud position compared to the nadir-viewing active sensors on CloudSat and CALIPSO.
7. Conclusions
- (1)
- Calibration changes across different maturity levels of input SDR introduce inconsistencies in the operational SNPP VIIRS EDRs, resulting in spurious trends in long-term climate change analysis and monitoring. Additionally, artificial fluctuations and inconsistencies in long-term EDR data are also caused by changes in retrieval algorithms. Therefore, it is critical to reprocess the SNPP VIIRS EDR products over the whole sensor lifetime with uniform input data sources and retrieval algorithms to avoid deceptive trends and dynamics that are non-climate change signals. As a result, future studies will focus on reprocessing all kinds of VIIRS EDRs over the entire lifespan of the sensor, including clouds, ice thickness and age, snow cover, etc.
- (2)
- As more VIIRS EDR variables are reprocessed in the future, including Cloud Cover Layer (CCL), Cloud Phase (CP), Daytime/Nighttime Cloud Optical and Microphysical Properties (D/NCOPMP), Snow Cover, and Ice Thickness and Age, their quality will be assessed.
- (3)
- With the entire lifecycle of VIIRS EDRs reprocessed, the long-term spatiotemporal patterns of these reprocessed EDRs will be analyzed and compared with both operational VIIRS products and measurements from active sensors.
- (4)
- Using the long-term reprocessed EDRs for climate change assessment. Due to the relatively short history of VIIRS data (~14 years), we plan to develop new algorithms, particularly leveraging Artificial Intelligence (AI) technologies, to retrieve VIIRS EDRs using spectral data from satellite sensors with longer data records and similar wavelengths, such as MODIS. This approach aims to reduce biases caused by differences between satellite sensors, including spatiotemporal resolution, retrieval algorithms, geolocation accuracy, and product availability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Version | Changes |
|---|---|
| Version 2.0 to 2.3 | (1) Support of combinations of multiple channels, including the following: 6.2, 6.7, 7.3, 8.5, 10.4, 11, 12, 13.3, 13.6, 13.9, and 14.2 μm; (2) flexibility of using 10.4 μm to replace 11 μm observations (GOES-17 only); (3) changes in microphysical index β fitting from linear to high-order polynomial to account for multiple scattering impact of the 3.75 μm; (4) including ice fraction as the fifth output from the optimal estimation algorithm. |
| Version 2.3 to 3.2 | Changes are made to reflect all current supported channel combinations and include in Appendix A the GOES17 mitigation work. Some other updates, such as use of the KD-tree technique and NUCAPS data, are also briefly discussed. |
| Cloud Top Height (km) | CWP Thresholds (g/m2) | Constant a (Slope) | Constant b (y-int) |
|---|---|---|---|
| 0 < CTH < 2 | 71 | 2.2581 | 0.4056 |
| 0.9970 | 0.5170 | ||
| 2 ≤ CTH < 4 | 114 | 6.1098 | 0.6648 |
| 0.9130 | 1.3570 | ||
| 4 ≤ CTH < 6 | 110 | 11.5574 | 1.2253 |
| 1.3792 | 2.5866 | ||
| 6 ≤ CTH < 8 | 123 | 14.5382 | 1.7057 |
| 1.6871 | 3.6228 | ||
| 8 ≤ CTH < 10 | 131 | 9.0986 | 2.1425 |
| 2.4595 | 3.8696 | ||
| 10 ≤ CTH < 12 | 127 | 13.5772 | 1.8655 |
| 4.8309 | 3.5314 | ||
| 12 ≤ CTH < 14 | 115 | 16.0793 | 1.6497 |
| 5.0517 | 3.9861 | ||
| 14 ≤ CTH < 16 | 116 | 14.6030 | 2.0001 |
| 6.0644 | 4.0330 | ||
| 16 ≤ CTH | 99 | 9.2658 | 2.2964 |
| 6.6043 | 3.2644 |
| Dataset | Period |
|---|---|
| Reprocessed VIIRS EDR | 10 October 2018~7 July 2019 |
| Operational VIIRS EDR | 10 March 2019~7 July 2019 |
| the 2B-CLDCLASS-LIDAR | 10 October 2018~7 July 2019 |
| QC Flags | Definition |
|---|---|
| 0 | Valid retrieval |
| 1 | Invalid due to the upstream input being invalid or clear |
| 2 | Out of range due to CBH lower than terrain (set to TBH = terrain) |
| 3 | Out of range due to CBH < minCBH (0 km) or CBH > maxCBH (20 km) |
| 4 | Invalid due to CBH ≥ CTH |
| 5 | Valid CBH from the extinction method |
| 6 | Valid CBH from CWP_NWP for deep convection |
| QC Flags | Definition |
|---|---|
| 0 | Good Retrieval |
| 1 | Invalid Retrieval |
| 2 | Bad Retrieval |
References
- Liu, Q.; Xu, H.; Houser, P.R.; Sun, D.; Rice, M.; Wang, L.; Duffy, D.Q.; Yang, C. Cross-track infrared sounder cloud fraction retrieval using a deep neural network. Comput. Geosci. 2023, 170, 105268. [Google Scholar] [CrossRef]
- Liu, Q.; Xu, H.; Sha, D.; Lee, T.; Duffy, D.Q.; Walter, J.; Yang, C. Hyperspectral infrared sounder cloud detection using deep neural network model. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar]
- Bony, S.; Stevens, B.; Frierson, D.M.; Jakob, C.; Kageyama, M.; Pincus, R.; Shepherd, T.G.; Sherwood, S.C.; Siebesma, A.P.; Sobel, A.H.; et al. Clouds, circulation and climate sensitivity. Nat. Geosci. 2015, 8, 261–268. [Google Scholar]
- Stephens, G.L.; Webster, P.J. Clouds and climate: Sensitivity of simple systems. J. Atmos. Sci. 1981, 38, 235–247. [Google Scholar]
- Simpson, J.J.; McIntire, T.; Jin, Z.; Stitt, J.R. Improved cloud top height retrieval under arbitrary viewing and illumination conditions using AVHRR data. Remote Sens. Environ. 2000, 72, 95–110. [Google Scholar] [CrossRef]
- Hamann, U.; Walther, A.; Baum, B.; Bennartz, R.; Bugliaro, L.; Derrien, M.; Francis, P.N.; Heidinger, A.; Joro, S.; Kniffka, A.; et al. Remote sensing of cloud top pressure/height from SEVIRI: Analysis of ten current retrieval algorithms. Atmos. Meas. Tech. 2014, 7, 2839–2867. [Google Scholar] [CrossRef]
- Liu, Q.; Sha, D.; Liu, W.; Houser, P.; Zhang, L.; Hou, R.; Lan, H.; Flynn, C.; Lu, M.; Hu, T.; et al. Spatiotemporal patterns of COVID-19 impact on human activities and environment in mainland China using nighttime light and air quality data. Remote Sens. 2020, 12, 1576. [Google Scholar] [CrossRef]
- Tan, Z.; Huo, J.; Ma, S.; Han, D.; Wang, X.; Hu, S.; Yan, W. Estimating cloud base height from Himawari-8 based on a random forest algorithm. Int. J. Remote Sens. 2021, 42, 2485–2501. [Google Scholar]
- Cao, C.; Xiong, X.; Blonski, S.; Liu, Q.; Guenther, B.; Weng, F. Suomi NPP VIIRS on-orbit performance, data quality, and new applications. In Earth Observing Missions and Sensors: Development, Implementation, and Characterization II; SPIE: Pune, India, 2012; Volume 8528, pp. 49–56. [Google Scholar]
- Skoufias, E.; Strobl, E.; Tveit, T. Can we rely on VIIRS nightlights to estimate the short-term impacts of natural hazards? Evidence from five South East Asian countries. Geomat. Nat. Hazards Risk 2021, 12, 381–404. [Google Scholar]
- Sun, S.; Li, L.; Wu, Z.; Gautam, A.; Li, J.; Zhao, W. Variation of industrial air pollution emissions based on VIIRS thermal anomaly data. Atmos. Res. 2020, 244, 105021. [Google Scholar]
- Butler, J.J.; Xiong, X.; Barnes, R.A.; Patt, F.S.; Sun, J.; Chiang, K. An overview of Suomi NPP VIIRS calibration maneuvers. Earth Obs. Syst. XVII 2012, 8510, 603–615. [Google Scholar]
- Xiong, X.; Butler, J.; Chiang, K.; Efremova, B.; Fulbright, J.; Lei, N.; McIntire, J.; Oudrari, H.; Sun, J.; Wang, Z.; et al. VIIRS on-orbit calibration methodology and performance. J. Geophys. Res. Atmos. 2014, 119, 5065–5078. [Google Scholar] [CrossRef]
- Xiong, X.; Sun, J.; Fulbright, J.; Wang, Z.; Butler, J.J. Lunar calibration and performance for S-NPP VIIRS reflective solar bands. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1052–1061. [Google Scholar] [CrossRef]
- Xiong, X.; Butler, J.J. MODIS and VIIRS calibration history and future outlook. Remote Sens. 2020, 12, 2523. [Google Scholar] [CrossRef]
- Xiong, X.; Angal, A.; Chang, T.; Chiang, K.; Lei, N.; Li, Y.; Sun, J.; Twedt, K.; Wu, A. MODIS and VIIRS calibration and characterization in support of producing long-term high-quality data products. Remote Sens. 2020, 12, 3167. [Google Scholar] [CrossRef]
- Weisz, E.; Li, J.; Menzel, W.P.; Heidinger, A.K.; Kahn, B.H.; Liu, C.Y. Comparison of AIRS, MODIS, CloudSat and CALIPSO cloud top height retrievals. Geophys. Res. Lett. 2007, 34, L17811. [Google Scholar] [CrossRef]
- Li, Y.; Baum, B.A.; Heidinger, A.K.; Menzel, W.P.; Weisz, E. Improvement in cloud retrievals from VIIRS through the use of infrared absorption channels constructed from VIIRS+ CrIS data fusion. Atmos. Meas. Tech. 2020, 13, 4035–4049. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Pavolonis, M.J.; Holz, R.E.; Baum, B.A.; Berthier, S. Using CALIPSO to explore the sensitivity to cirrus height in the infrared observations from NPOESS/VIIRS and GOES-R/ABI. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar]
- Noh, Y.J.; Forsythe, J.M.; Miller, S.D.; Seaman, C.J.; Li, Y.; Heidinger, A.K.; Lindsey, D.T.; Rogers, M.A.; Partain, P.T. Cloud-base height estimation from VIIRS. Part II: A statistical algorithm based on A-Train satellite data. J. Atmos. Ocean. Technol. 2017, 34, 585–598. [Google Scholar] [CrossRef]
- Seaman, C.J.; Noh, Y.J.; Miller, S.D.; Heidinger, A.K.; Lindsey, D.T. Cloud-base height estimation from VIIRS. Part I: Operational algorithm validation against CloudSat. J. Atmos. Ocean. Technol. 2017, 34, 567–583. [Google Scholar] [CrossRef]
- Zou, C.Z.; Zhou, L.; Lin, L.; Sun, N.; Chen, Y.; Flynn, L.E.; Zhang, B.; Cao, C.; Iturbide-Sanchez, F.; Beck, T.; et al. The reprocessed Suomi NPP satellite observations. Remote Sens. 2020, 12, 2891. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The solar spectral irradiance from 200 to 2400 nm as measured by the SOLSPEC spectrometer from the ATLAS and EURECA missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar]
- Heidinger, A.K.; Li, Y. Enterprise AWG Cloud Height Algorithm (ACHA) Version 3.2. 2018. Available online: https://www.ssec.wisc.edu/~daves/ACHA_ATBD.pdf (accessed on 8 November 2024).
- Heidinger, A.K.; Pavolonis, M.J.; Calvert, C.; Hoffman, J.; Nebuda, S.; Straka, W., III; Walther, A.; Wanzong, S. ABI cloud products from the GOES-R series. In The GOES-R Series; Elsevier: Amsterdam, The Netherlands, 2020; pp. 43–62. [Google Scholar]
- Menzel, W.P.; Frey, R.A.; Baum, B.A.; Zhang, H. Cloud Top Properties and Cloud Phase—Algorithm Theoretical Basis Document. 2006. Available online: https://modis.gsfc.nasa.gov/data/atbd/atbd_mod04.pdf (accessed on 8 November 2024).
- Zhang, H.; Menzel, W.P. Improvement in thin cirrus retrievals using an emissivity-adjusted CO2 slicing algorithm. J. Geophys. Res. Atmos. 2002, 107, AAC-2. [Google Scholar]
- Heidinger, A.K.; Bearson, N.; Foster, M.J.; Li, Y.; Wanzong, S.; Ackerman, S.; Holz, R.E.; Platnick, S.; Meyer, K. Using sounder data to improve cirrus cloud height estimation from satellite imagers. J. Atmos. Ocean. Technol. 2019, 36, 1331–1342. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Li, Y.; Wanzong, S. Enterprise AWG Cloud Height Algorithm (ACHA) Version 3.4. 2020. Available online: https://www.star.nesdis.noaa.gov/jpss/documents/ATBD/ATBD_EPS_Cloud_ACHA_v3.4.pdf (accessed on 8 November 2024).
- Hutchison, K.D. The retrieval of cloud base heights from MODIS and three-dimensional cloud fields from NASA’s EOS Aqua mission. Int. J. Remote Sens. 2002, 23, 5249–5265. [Google Scholar] [CrossRef]
- Hutchison, K.; Wong, E.; Ou, S.C. Cloud base heights retrieved during night-time conditions with MODIS data. Int. J. Remote Sens. 2006, 27, 2847–2862. [Google Scholar] [CrossRef]
- Marchand, R.; Mace, G.G.; Ackerman, T.; Stephens, G. Hydrometeor detection using CloudSat—An Earth-orbiting 94-GHz cloud radar. J. Atmos. Ocean. Technol. 2008, 25, 519–533. [Google Scholar] [CrossRef]
- Friedman, J.H.; Bentley, J.L.; Finkel, R.A. An algorithm for finding best matches in logarithmic expected time. ACM Trans. Math. Softw. 1977, 3, 209–226. [Google Scholar]
- Bentley, J.L. K-d trees for semidynamic point sets. In Proceedings of the Sixth Annual Symposium on Computational Geometry, New York, NY, USA, 7–9 June 1990; pp. 187–197. [Google Scholar]
- Doraiswamy, H.; Natarajan, V.; Nanjundiah, R.S. An exploration framework to identify and track movement of cloud systems. IEEE Trans. Vis. Comput. Graph. 2013, 19, 2896–2905. [Google Scholar] [CrossRef]
- Tan, Z.; Zhao, X.; Hu, S.; Ma, S.; Wang, L.; Wang, X.; Ai, W. Climatology of Cloud Base Height Retrieved from Long-Term Geostationary Satellite Observations. Remote Sens. 2023, 15, 3424. [Google Scholar] [CrossRef]
- Dong, Y.; Sun, X.; Li, Q. A method for retrieving cloud-top height based on a machine learning model using the Himawari-8 combined with near infrared data. Remote Sens. 2022, 14, 6367. [Google Scholar] [CrossRef]
- Yang, X.; Ge, J.; Hu, X.; Wang, M.; Han, Z. Cloud-top height comparison from multi-satellite sensors and ground-based cloud radar over SACOL site. Remote Sens. 2021, 13, 2715. [Google Scholar] [CrossRef]
- Holz, R.E.; Ackerman, S.A.; Nagle, F.W.; Frey, R.; Dutcher, S.; Kuehn, R.E.; Vaughan, M.A.; Baum, B. Global Moderate Resolution Imaging Spectroradiometer (MODIS) cloud detection and height evaluation using CALIOP. J. Geophys. Res. Atmos. 2008, 113, D00A19. [Google Scholar] [CrossRef]
- Heidinger, A.K.; Foster, M.J.; Walther, A.; Zhao, X. The Pathfinder Atmospheres–Extended AVHRR climate dataset. Bull. Am. Meteorol. Soc. 2012, 95, 909–922. [Google Scholar] [CrossRef]
- Di Michele, S.; McNally, T.; Bauer, P.; Genkova, I. Quality assessment of cloud-top height estimates from satellite IR radiances using the CALIPSO lidar. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2454–2464. [Google Scholar]
- Sporre, M.K.; O’Connor, E.J.; Håkansson, N.; Thoss, A.; Swietlicki, E.; Petäjä, T. Comparison of MODIS and VIIRS cloud properties with ARM ground-based observations over Finland. Atmos. Meas. Tech. 2016, 9, 3193–3203. [Google Scholar]
- Marchand, R.; Ackerman, T.; Smyth, M.; Rossow, W.B. A review of cloud top height and optical depth histograms from MISR, ISCCP, and MODIS. J. Geophys. Res. Atmos. 2010, 115, D16206. [Google Scholar]
- Bilbao, I.; Bilbao, J. December. Overfitting problem and the over-training in the era of data: Particularly for Artificial Neural Networks. In Proceedings of the 2017 Eighth International Conference on Intelligent Computing and Information Systems (ICICIS), Cairo, Egypt, 5–7 December 2017; pp. 173–177. [Google Scholar]


| Reprocessed (Operational) | RMSE (km) | MBE (km) | Accurate% | Valid Pixel Amount | |
|---|---|---|---|---|---|
| October 2018 | 0.77 | 2.31 | −0.81 | 12.34 | 31,673 |
| November 2018 | 0.76 | 2.50 | −1.01 | 12.02 | 45,828 |
| December 2018 | 0.79 | 2.42 | −0.81 | 12.91 | 47,233 |
| January 2019 | 0.80 | 2.34 | −0.76 | 12.51 | 61,464 |
| February 2019 | 0.81 | 2.26 | −0.65 | 15.69 | 61,649 |
| March 2019 | 0.82 (0.85) | 2.14 (2.12) | −0.70 (−0.97) | 12.83 (15.57) | 47,503 (39,961) |
| April 2019 | 0.72 (0.84) | 2.64 (2.12) | −0.96 0.88) | 12.91 (15.02) | 24,961 (34,319) |
| May 2019 | 0.69 (0.82) | 2.84 (2.32) | −1.29 (−1.23) | 13.31 (11.26) | 65,841 (82,873) |
| June 2019 | 0.73 (0.85) | 2.66 (2.32) | −1.10 (−1.31) | 13.27 (12.69) | 75,206 (74,818) |
| Reprocessed (Operational) | RMSE (m) | MBE | Accurate% | Valid Pixel Amount | |
|---|---|---|---|---|---|
| October 2018 | 0.74 | 1.89 | 0.63 | 10.68 | 9680 |
| November 2018 | 0.75 | 1.89 | 0.42 | 10.46 | 15,444 |
| December 2018 | 0.77 | 1.89 | 0.47 | 11.10 | 17,563 |
| January 2019 | 0.77 | 1.91 | 0.44 | 10.85 | 19,851 |
| February 2019 | 0.76 | 1.88 | 0.47 | 10.90 | 20,517 |
| March 2019 | 0.77 (0.76) | 1.90 (1.85) | 0.55 (0.64) | 10.25 (11.14) | 16,683 (18,922) |
| April 2019 | 0.74 (0.73) | 1.73 (1.76) | 0.36 (0.10) | 11.90 (13.27) | 8747 (15,842) |
| May 2019 | 0.76 (0.74) | 1.70 (1.73) | 0.34 (−0.06) | 12.10 (12.55) | 21,022 (41,046) |
| June 2019 | 0.74 (0.69) | 1.74 (1.72) | 0.43 (−0.15) | 12.32 (12.95) | 21,670 (32,807) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Hao, X.; Zou, C.-Z.; Wang, L.; Qu, J.J.; Yan, B. A Preliminary Assessment of the VIIRS Cloud Top and Base Height Environmental Data Record Reprocessing. Remote Sens. 2025, 17, 1036. https://doi.org/10.3390/rs17061036
Liu Q, Hao X, Zou C-Z, Wang L, Qu JJ, Yan B. A Preliminary Assessment of the VIIRS Cloud Top and Base Height Environmental Data Record Reprocessing. Remote Sensing. 2025; 17(6):1036. https://doi.org/10.3390/rs17061036
Chicago/Turabian StyleLiu, Qian, Xianjun Hao, Cheng-Zhi Zou, Likun Wang, John J. Qu, and Banghua Yan. 2025. "A Preliminary Assessment of the VIIRS Cloud Top and Base Height Environmental Data Record Reprocessing" Remote Sensing 17, no. 6: 1036. https://doi.org/10.3390/rs17061036
APA StyleLiu, Q., Hao, X., Zou, C.-Z., Wang, L., Qu, J. J., & Yan, B. (2025). A Preliminary Assessment of the VIIRS Cloud Top and Base Height Environmental Data Record Reprocessing. Remote Sensing, 17(6), 1036. https://doi.org/10.3390/rs17061036