


A Multi-Receiver GNSS System Geometry Control Algorithm in Mobile Measurement of Railway Track Axis Position
 , ,
, ,  , , , , ,
, , , , ,  and
and
Abstract
1. Introduction
2. Materials and Methods
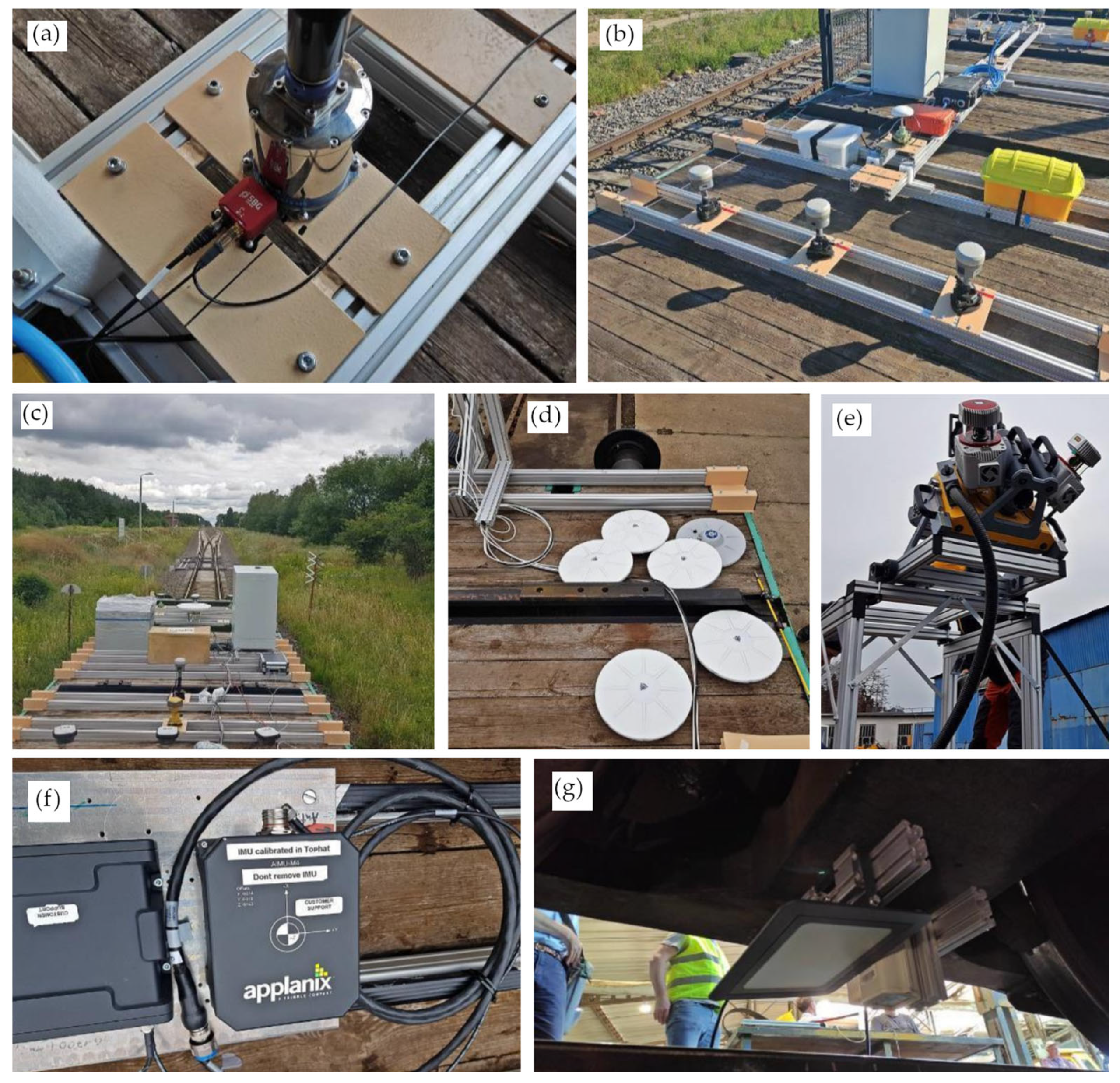
2.1. Mobile Satellite-Based Measurement of the Track Axis
2.2. Determination of the Track Axis and Measurement Uncertainty
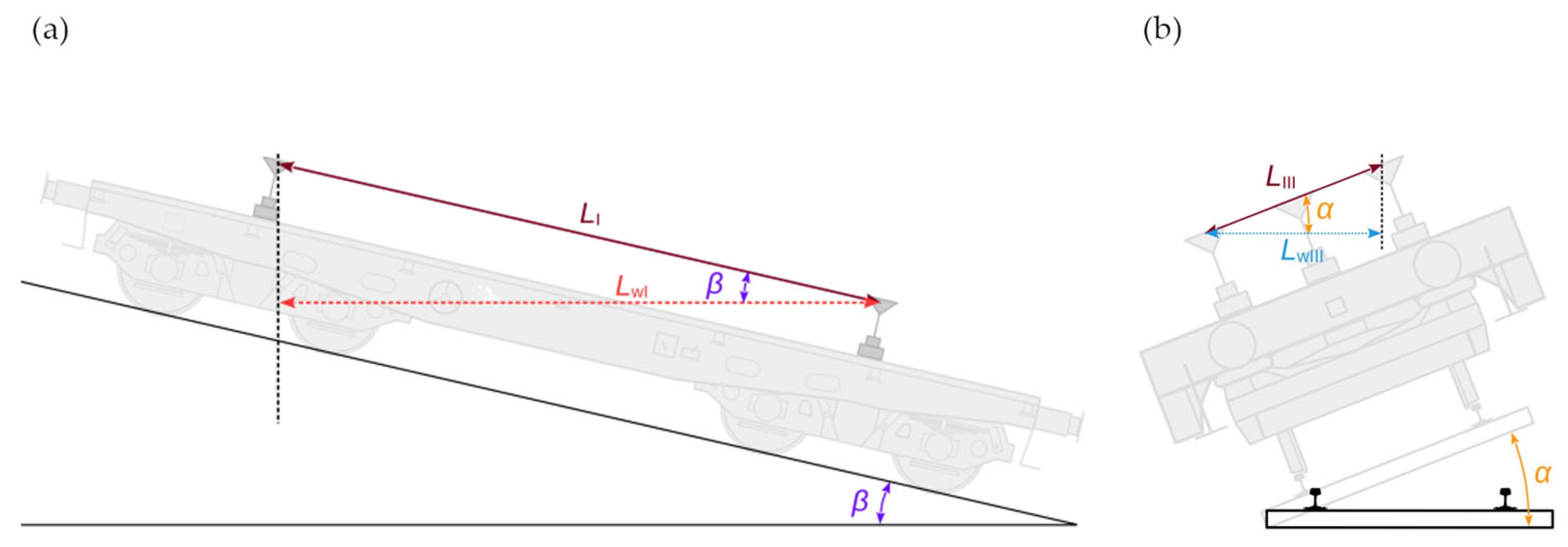
2.3. Measurement Platform Configuration and Correction Principle
- For L1, L2 and L3:
2.4. Algorithm for Determining the Correction of Track Axis Coordinates
2.4.1. Definition of Quality Conditions
- At least two control distances between the considered receiver and the others must fall within the assumed tolerance, including
- ○
- At least one “short” distance.
- ○
- At least one “long” distance.
- All “long” control distances from the considered receiver must be within the accepted tolerance.
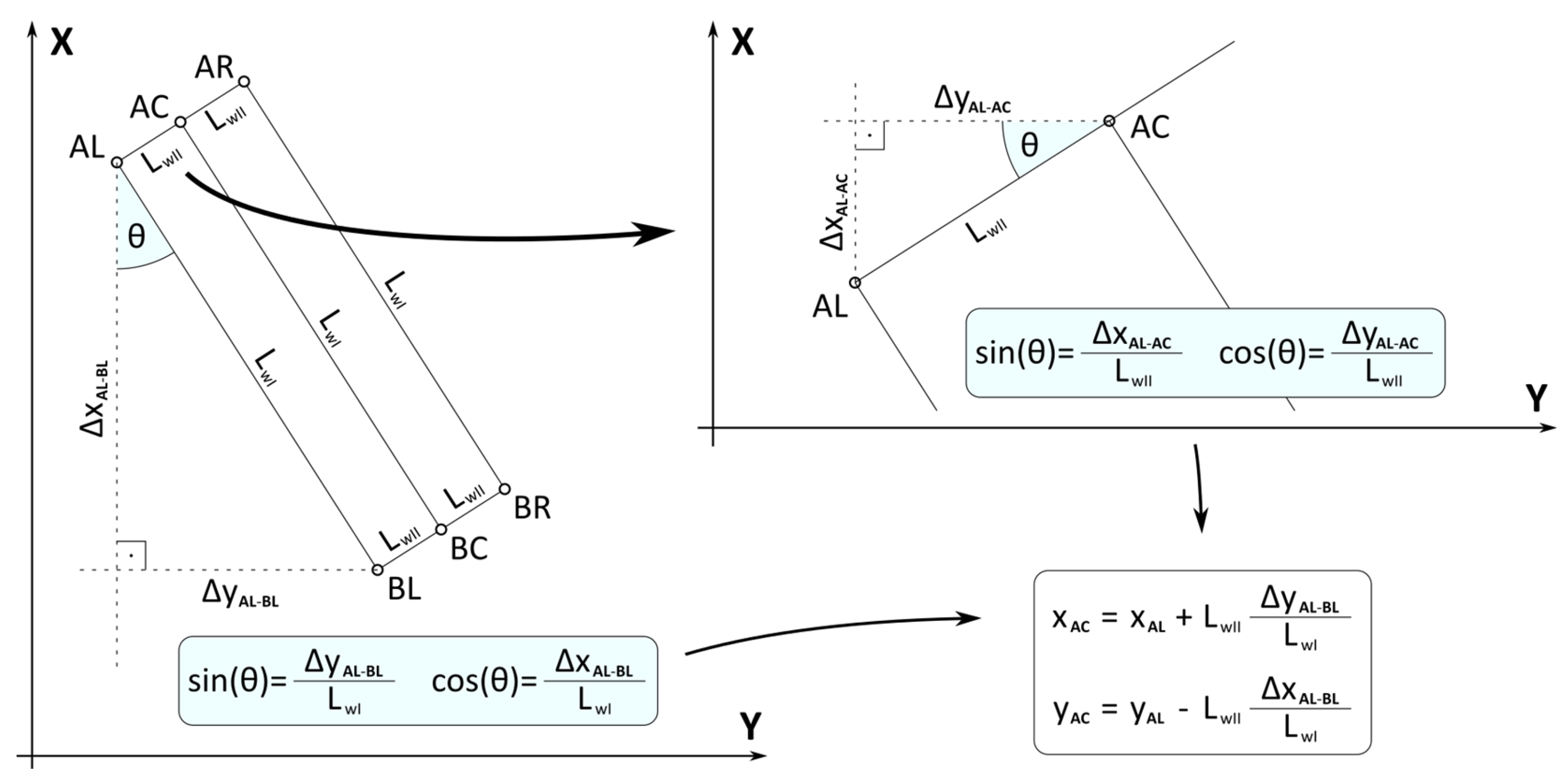
2.4.2. Calculation of the Corrected Coordinate Values
- refers to the calibration uncertainty of fixed base [m].
- is the fixed base length derived from the corrected coordinates of antennas AC- BC.
- is the reference distance (compare Figure 2 with Equations (2) and (5)).
- is the assumed acceptable fixed base uncertainty (arbitrary value).
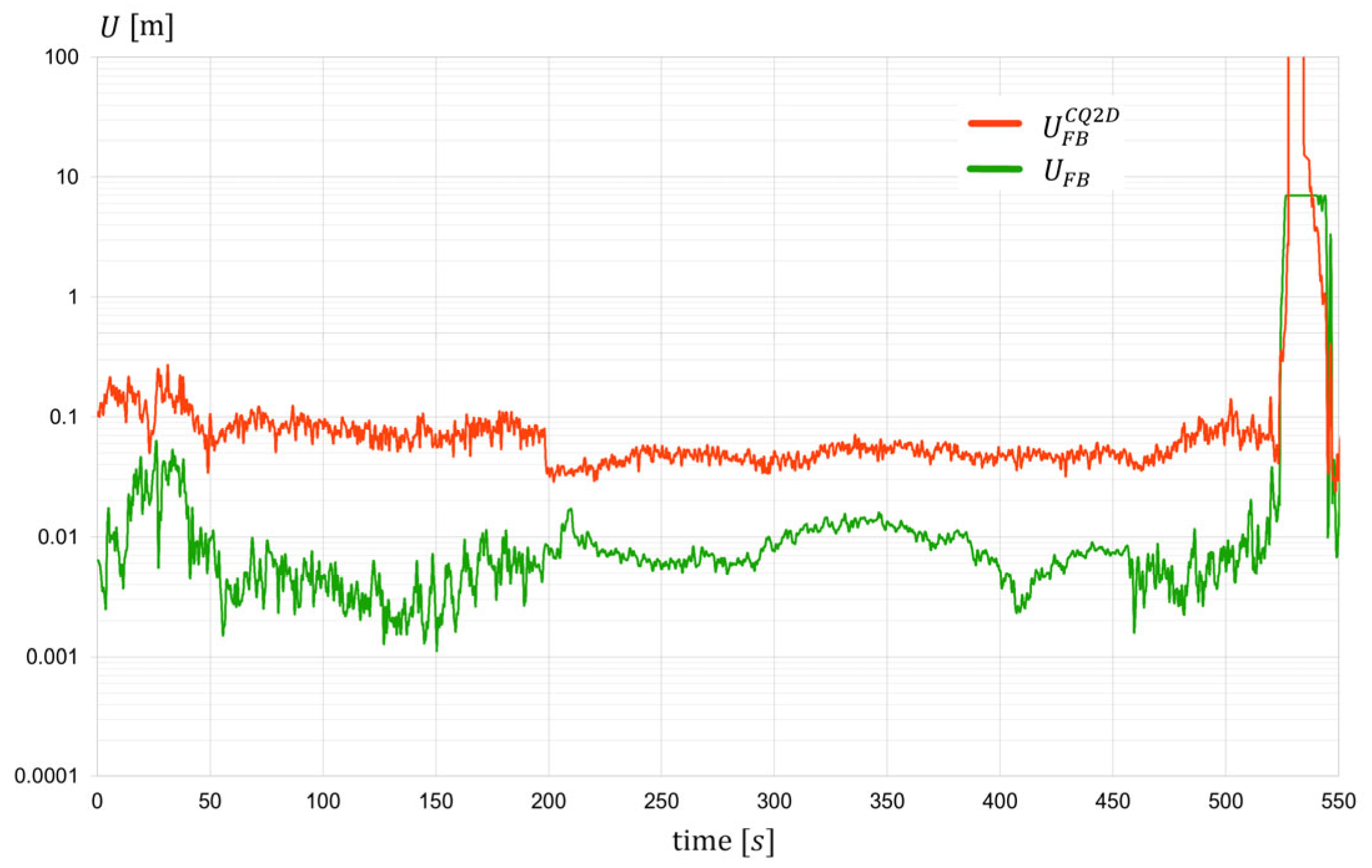
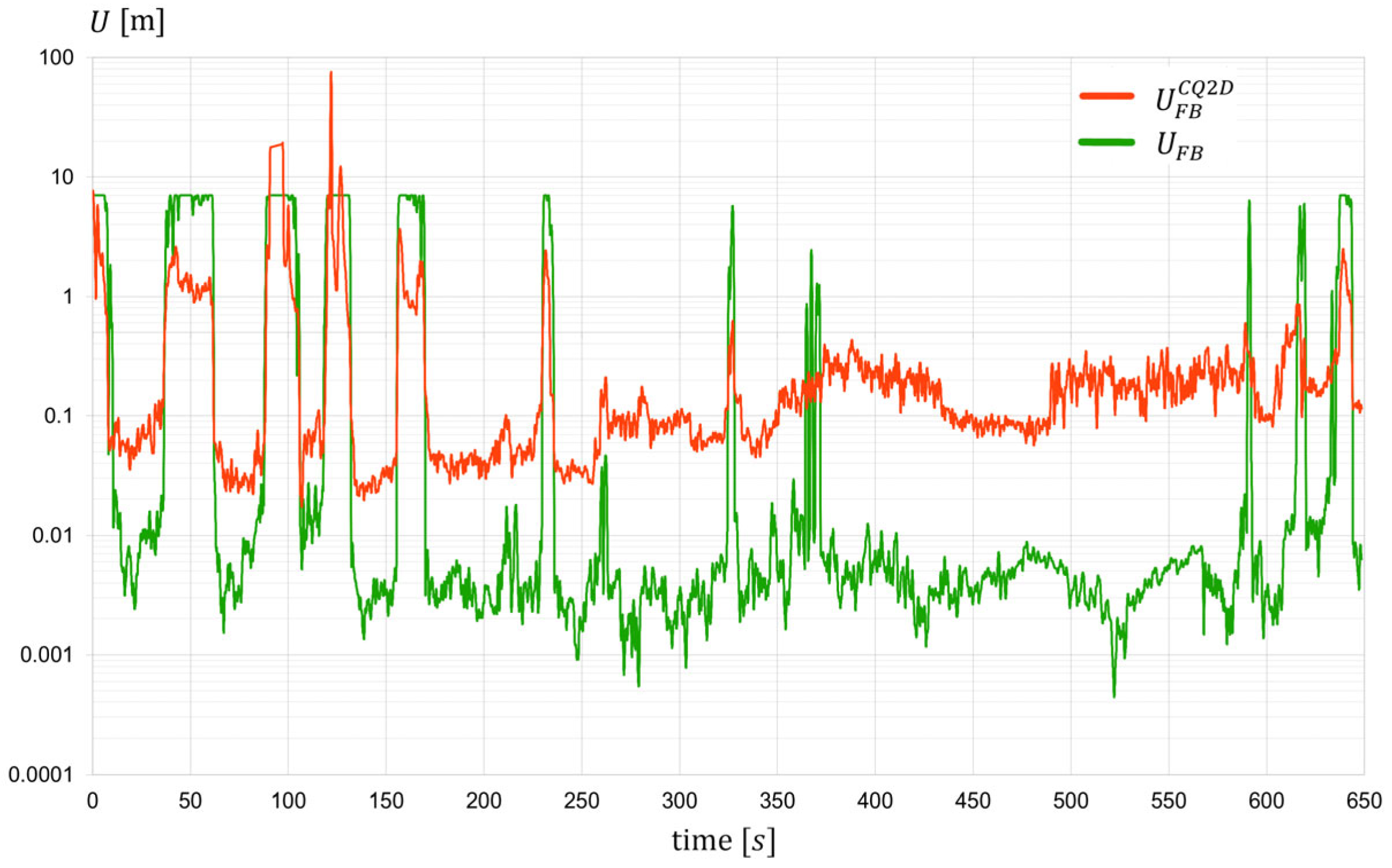
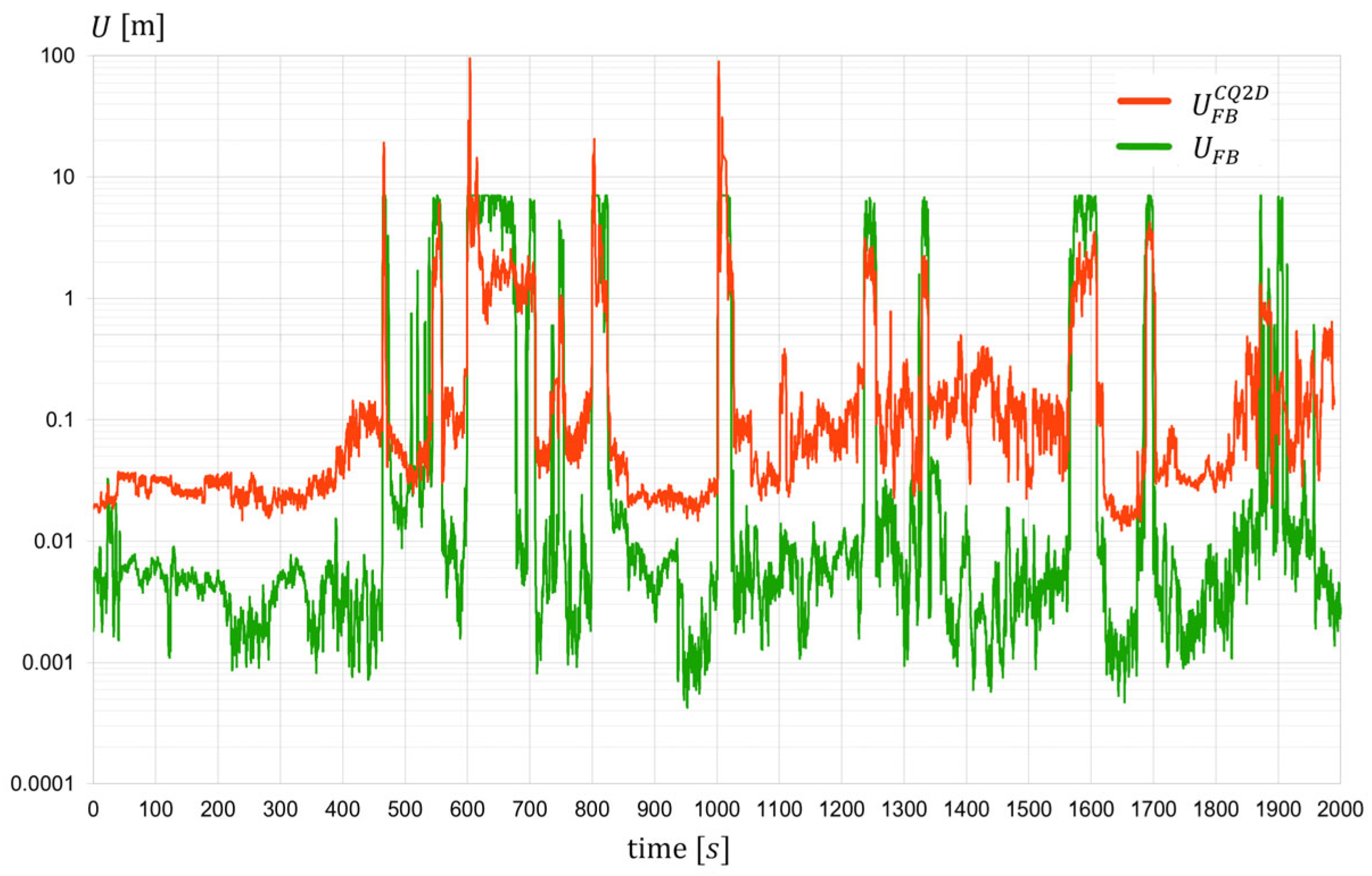
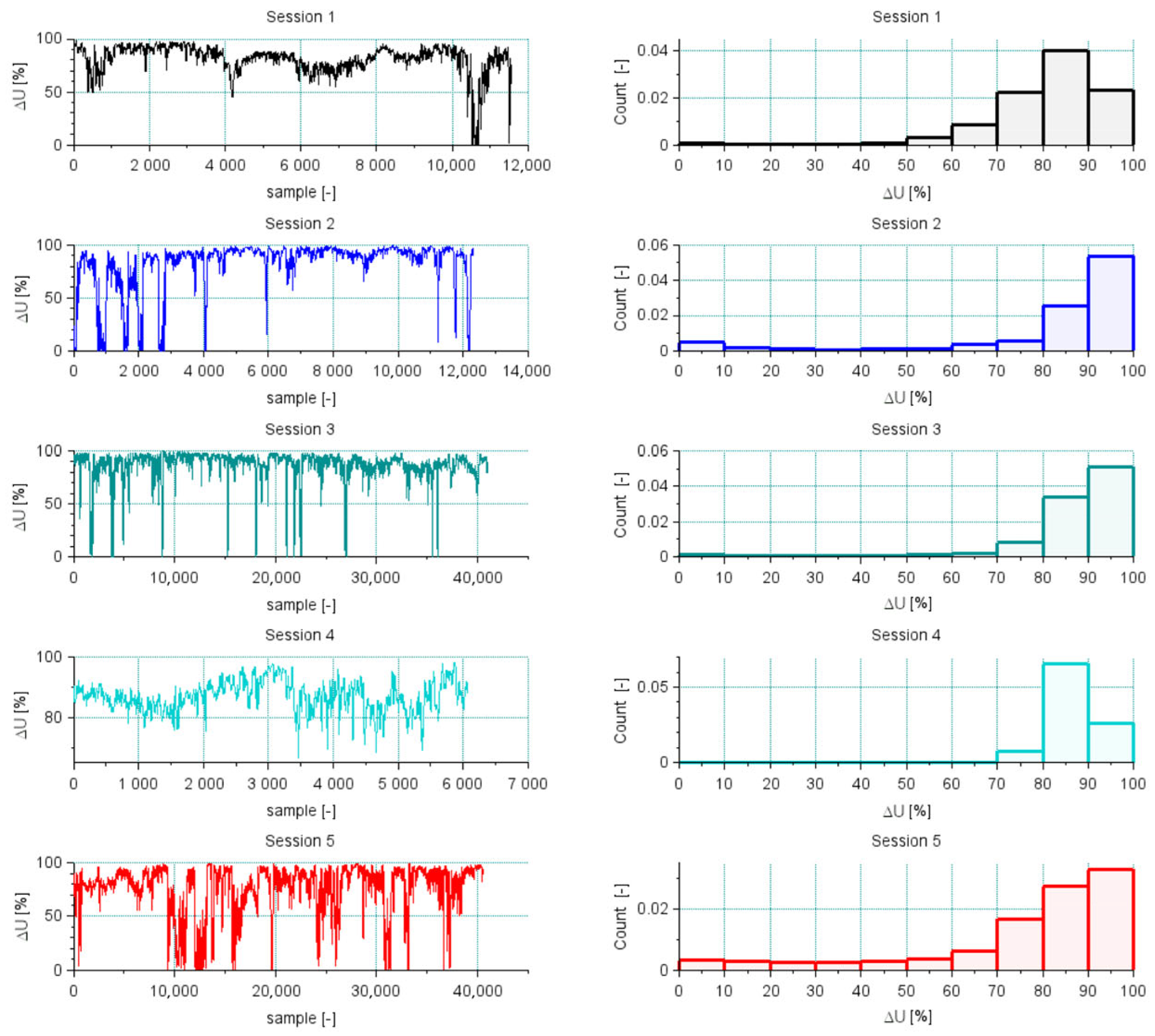
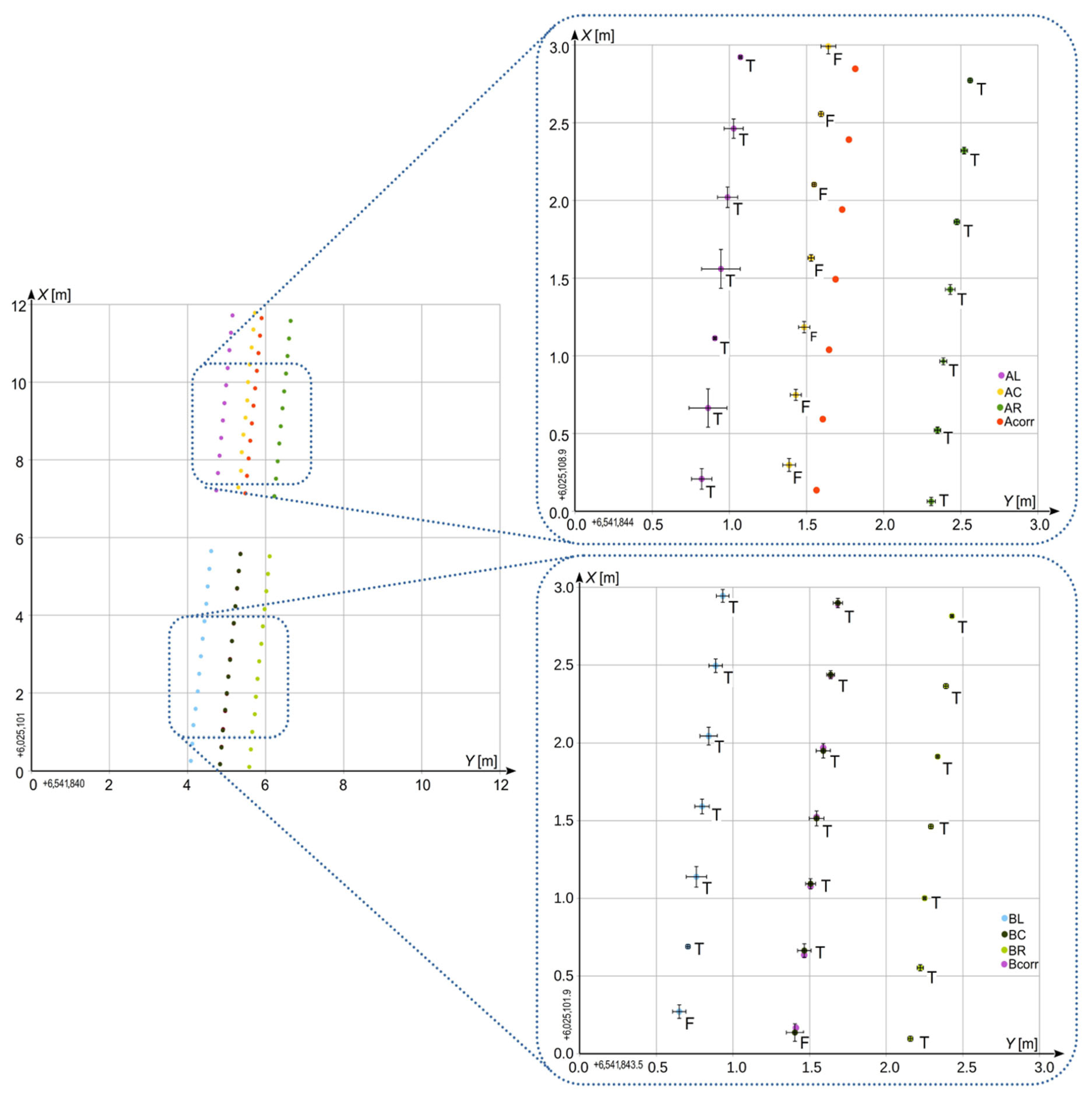
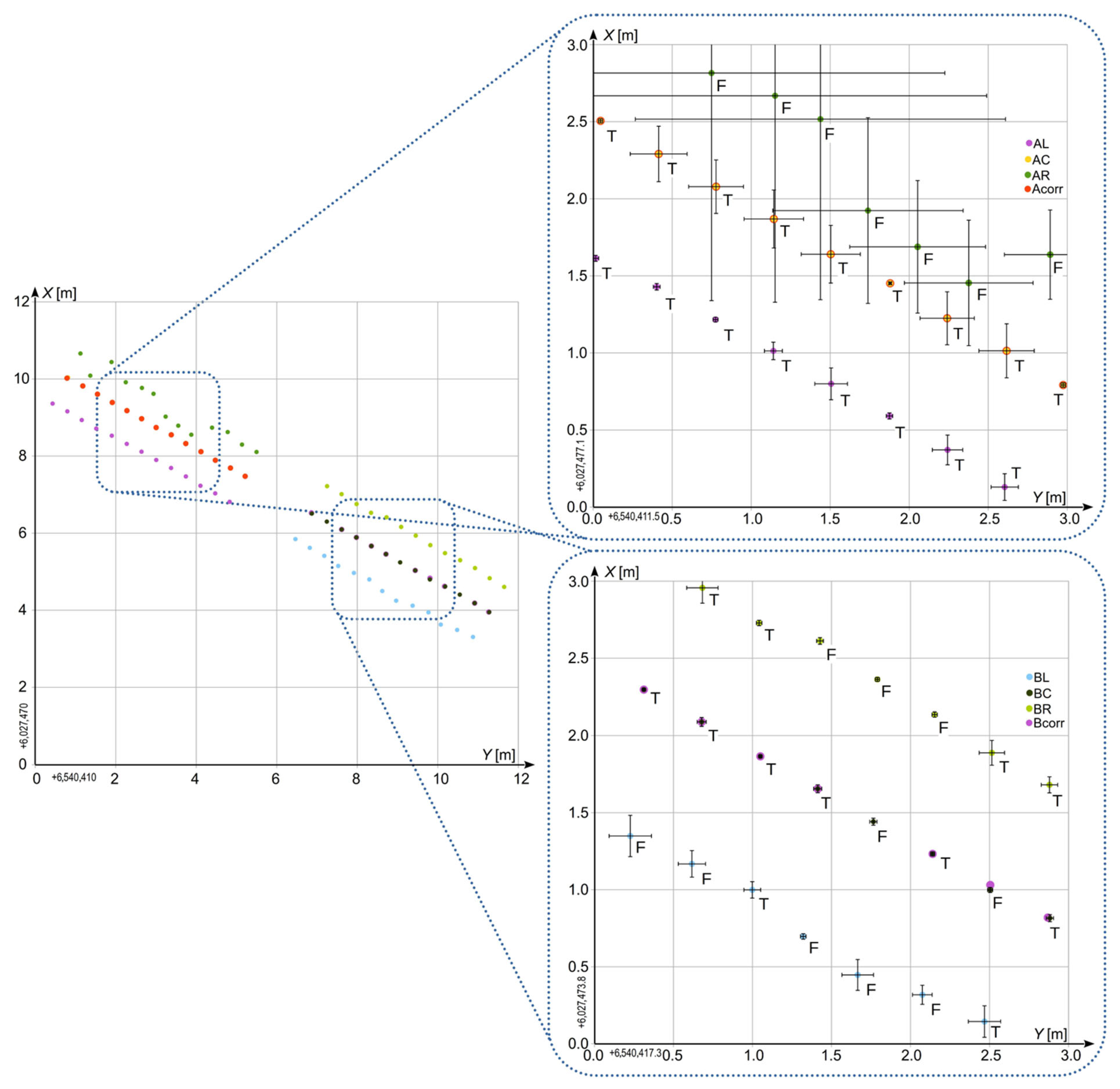
3. Results
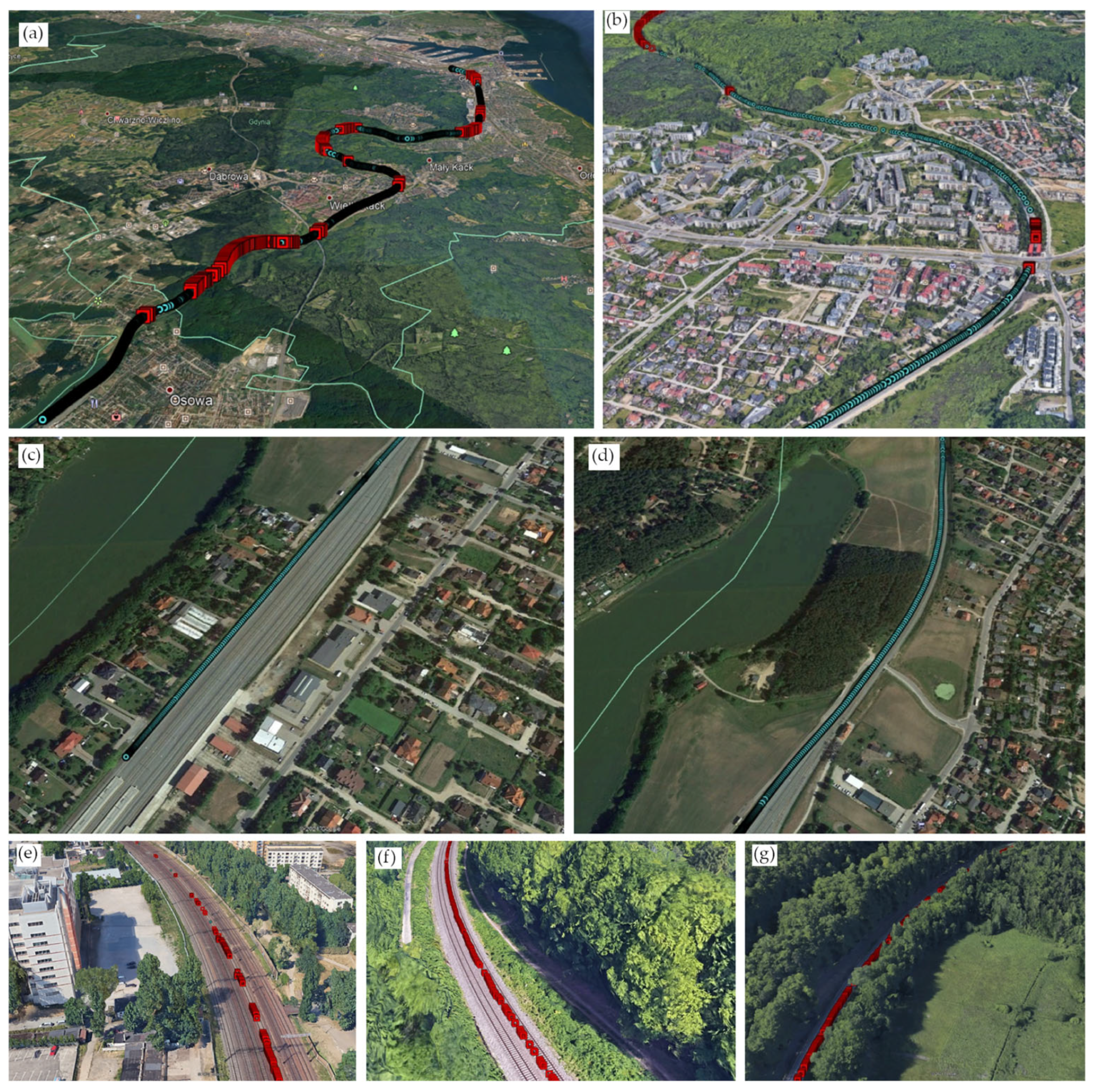
3.1. Results of Measurements—Evaluation of Algorithm Effectiveness
3.2. Effectiveness of the Algorithm
- are the base antennas coordinates in PL-2000 [m].
- is the fixed base of a measurement wagon [m].
- is the calculated standard uncertainty of fixed base [m].
- is the calculated calibration uncertainty of fixed base [m].
- is the calculated expanded uncertainty of fixed base [m].
- is the calculated expanded uncertainty of fixed base [m].
- represents coverage factor k [-].
- represents the relative reduction in the expanded uncertainty of the fixed base [%].
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Elkhoury, N.; Hitihamillage, L.; Moridpour, S.; Robert, D. Degradation prediction of rail tracks: A review of the existing literature. Open Transp. J. 2018, 12. [Google Scholar] [CrossRef]
- Gonzalo, A.P.; Horridge, R.; Steele, H.; Stewart, E.; Entezami, M. Review of data analytics for condition monitoring of railway track geometry. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22737–22754. [Google Scholar] [CrossRef]
- Soleimanmeigouni, I.; Ahmadi, A.; Kumar, U. Track geometry degradation and maintenance modelling: A review. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 73–102. [Google Scholar] [CrossRef]
- Farkas, A. Measurement of railway track geometry: A state-of-the-art review. Period. Polytech. Transp. Eng. 2020, 48, 76–88. [Google Scholar] [CrossRef]
- Zhu, F.; Luo, K.; Zhou, W. Measuring railway track irregularities at high accuracy and efficiency based on GNSS/INS/TS integration. IEEE Sens. J. 2022, 22, 15334. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Niu, X.; Liu, J. Semi-analytical assessment of the relative accuracy of the GNSS/INS in railway track irregularity measurements. Satell. Navig. 2021, 2, 25. [Google Scholar] [CrossRef]
- Reimer, C.; Müller, F.J.; Hinüber, E.L.V. INS/GNSS/odometer data fusion in railway applications. In Proceedings of the 2016 DGON Intertial Sensors and Systems (ISS), Karlsruhe, Germany, 20–21 September 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Mikhaylov, D.; Amatetti, C.; Polonelli, T.; Masina, E.; Campana, R.; Berszin, K.; Moatti, C.; Amato, D.; Vanelli-Coralli, A.; Magno, M.; et al. Toward the future generation of railway localization exploiting RTK and GNSS. IEEE Trans. Instrum. Meas. 2023, 72, 8502610. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Q.; Niu, X. Kinematic measurement of the railway track centerline position by GNSS/INS/odometer integration. IEEE Access 2019, 7, 157241–157253. [Google Scholar] [CrossRef]
- Wilk, A.; Koc, W.; Specht, C.; Skibicki, J.; Judek, S.; Karwowski, K.; Chrostowski, P.; Szmagliński, J.; Dąbrowski, P.; Czaplewski, K.; et al. Innovative mobile method to determine railway track axis position in global coordinate system using position measurements performed with GNSS and fixed base of the measuring vehicle. Measurement 2021, 175, 109016. [Google Scholar] [CrossRef]
- Teunissen, P.J.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Patel, J.K.; Read, C.B. Handbook of the Normal Distribution; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Specht, M.; Specht, C.; Wilk, A.; Koc, W.; Smolarek, L.; Czaplewski, K.; Karwowski, K.; Dąbrowski, P.S.; Skibicki, J.; Chrostowski, P.; et al. Testing the Positioning Accuracy of GNSS Solutions during the Tramway Track Mobile Satellite Measurements in Diverse Urban Signal Reception Conditions. Energies 2020, 13, 3646. [Google Scholar] [CrossRef]
- Dabrowski, P.S.; Specht, C.; Specht, M.; Burdziakowski, P.; Lewicka, O. Assessment of Adjustment of GNSS Railway Measurements with Parameter-Binding Conditions in a Stationary Scenario. Appl. Sci. 2022, 12, 12851. [Google Scholar] [CrossRef]
- Wilk, A.; Specht, C.; Koc, W.; Karwowski, K.; Skibicki, J.; Szmagliński, J.; Chrostowski, P.; Dabrowski, P.; Specht, M.; Zienkiewicz, M.; et al. Evaluation of the Possibility of Identifying a Complex Polygonal Tram Track Layout Using Multiple Satellite Measurements. Sensors 2020, 20, 4408. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Cai, B.; Lu, D.; Wang, J. An enhanced RAIM method for satellite-based positioning using track constraint. IEEE Access 2019, 7, 54390–54409. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Sarrabezolles, C.A.; Khan, M.A.; Golpayegani, F. A machine-learning-based approach for railway track monitoring using acceleration measured on an in-service train. Sensors 2023, 23, 7568. [Google Scholar] [CrossRef] [PubMed]
- Lederman, G.; Chen, S.; Garrett, J.H.; Kovačević, J.; Noh, H.Y.; Bielak, J. A data fusion approach for track monitoring from multiple in-service trains. Mech. Syst. Signal Process. 2017, 95, 363–379. [Google Scholar] [CrossRef]
- Rozporządzenie Rady Ministrów z dnia 15 Października 2012 r. w Sprawie Państwowego Systemu Odniesień Przestrzennych (Dz.U. 2012 poz. 1247). Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU20120001247 (accessed on 1 January 2025).
- Han, F.; Liang, T.; Ren, J.; Li, Y. Automated Extraction of Rail Point Clouds by Multi-Scale Dimensional Features from MLS Data. IEEE Access 2023, 11, 32427–32436. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Legat, K.; Wieser, M. Navigation: Principles of Positioning and Guidance; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Liang, W.; Li, J.; Xu, X.; Zhang, S.; Zhao, Y. A high-resolution Earth’s gravity field model SGG-UGM-2 from GOCE, GRACE, satellite altimetry, and EGM2008. Engineering 2020, 6, 860–878. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef]
- Kuczynska-Siehien, J.; Lyszkowicz, A.; Stepniak, K.; Krukowska, M. Determination of geopotential value W 0 L at Polish tide gauges from GNSS data and geoid model. Acta Geod. Geophys. 2017, 52, 527–534. [Google Scholar] [CrossRef]
- Bugayevskiy, L.M.; Snyder, J. Map Projections: A Reference Manual; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar] [CrossRef]
- Snyder, J.P.; Voxland, P.M. An Album of Map Projections (No. 1453); US Government Printing Office: Washington, DC, USA, 1989. [Google Scholar] [CrossRef]
- Hooijberg, M. Information and Computer Technology. Geometrical Geodesy: Using Information and Computer Technology. Springer: Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Grafarend, E.W.; Krumm, F.W. Map Projections Cartographic Information Systems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS–Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar] [CrossRef]
- Santerre, R.; Geiger, A.; Banville, S. Geometry of GPS dilution of precision: Revisited. GPS Solut. 2017, 21, 1747–1763. [Google Scholar] [CrossRef]
- JCGM 100:2008; Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement (GUM 1995 with Minor Corrections). 1st ed. Joint Committee for Guides in Metrology (JCGM): Sèvres, France, 2008. [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Point Id | 5830F00170_20210609_083941749 |
| Start Time | 9 June 2021 08:39:42 |
| GPS Time | 2161 290381.750 |
| WGS84 Cartesian X [m] | 3,531,069.0187 |
| WGS84 Cartesian Y [m] | 1,191,245.5035 |
| WGS84 Cartesian Z [m] | 5,158,894.6301 |
| WGS84 Latitude [°] | 54.33952279°N |
| WGS84 Longitude [°] | 18.64239643°E |
| WGS84 Ellip. Height [m] | 34.6315 |
| Easting [m] | 6,541,778.6156 |
| Northing [m] | 6,023,434.1565 |
| Ortho. Height [m] | 5.3597 |
| CQ 3D [m] | 0.0112 |
| CQ 2D [m] | 0.0063 |
| CQ 1D [m] | 0.0092 |
| PDOP | 2.1 |
| HDOP | 1.2 |
| VDOP | 1.7 |
| GDOP | 2.9 |
| GPS SVs | 6/9 |
| GLONASS SVs | 4/5 |
| Galileo SVs | - |
| Beidou SVs | - |
| Mean | Standard Deviation | Minimum | Maximum | |
|---|---|---|---|---|
| Session | [%] | [%] | [%] | [%] |
| 1 | 80.7 | 14.0 | 0.051 | 98.1 |
| 2 | 81.9 | 23.7 | 0.012 | 99.4 |
| 3 | 85.81 | 16.1 | 0.002 | 99.6 |
| 4 | 86.9 | 5.1 | 66.7 | 98.2 |
| 5 | 76.2 | 23.5 | 0.0004 | 99.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skibicki, J.; Wilk, A.; Koc, W.; Chrostowski, P.; Licow, R.; Dąbrowski, P.S.; Karwowski, K.; Judek, S.; Michna, M.; Szmagliński, J.; et al. A Multi-Receiver GNSS System Geometry Control Algorithm in Mobile Measurement of Railway Track Axis Position. Remote Sens. 2025, 17, 2461. https://doi.org/10.3390/rs17142461
Skibicki J, Wilk A, Koc W, Chrostowski P, Licow R, Dąbrowski PS, Karwowski K, Judek S, Michna M, Szmagliński J, et al. A Multi-Receiver GNSS System Geometry Control Algorithm in Mobile Measurement of Railway Track Axis Position. Remote Sensing. 2025; 17(14):2461. https://doi.org/10.3390/rs17142461
Chicago/Turabian StyleSkibicki, Jacek, Andrzej Wilk, Władysław Koc, Piotr Chrostowski, Roksana Licow, Paweł Szymon Dąbrowski, Krzysztof Karwowski, Sławomir Judek, Michał Michna, Jacek Szmagliński, and et al. 2025. "A Multi-Receiver GNSS System Geometry Control Algorithm in Mobile Measurement of Railway Track Axis Position" Remote Sensing 17, no. 14: 2461. https://doi.org/10.3390/rs17142461
APA StyleSkibicki, J., Wilk, A., Koc, W., Chrostowski, P., Licow, R., Dąbrowski, P. S., Karwowski, K., Judek, S., Michna, M., Szmagliński, J., & Grulkowski, S. (2025). A Multi-Receiver GNSS System Geometry Control Algorithm in Mobile Measurement of Railway Track Axis Position. Remote Sensing, 17(14), 2461. https://doi.org/10.3390/rs17142461