1. Introduction
Space-based radar takes satellites, which are not restricted by territories, territorial seas, or climates, as its platform. It offers advantages such as wide coverage, strong survivability, and long warning times. Additionally, it can detect and continuously track aerial moving targets at a long distance, significantly improving early-warning capabilities and providing more accurate target data for missile defense systems [
1,
2]. A unified system of space-based wideband radar detection and imaging can simultaneously achieve high-precision detection and imaging, offering critical data support for airborne target recognition [
3]. However, for wideband radar target tracking, the size of large aircraft targets is much larger than the radar resolution, causing measurements from the same target to be spread across multiple resolution cells. Furthermore, challenges such as the platform’s high-speed movement, long-range detection, perturbation interference, and nonlinear observations increase the uncertainty of measurement noise, posing significant difficulties for high-precision target tracking.
Random finite set (RFS)-based filters have been widely used in multi-target tracking due to their theoretically optimal framework [
4,
5]. To address extended target tracking within the RFS paradigm, R. Mahler derived the recursive formulation of the extended target probability hypothesis density (ET-PHD) filter [
6], including the measurement update equation for the PHD filter, which assumes a Poisson model for extended targets. Further developments [
7,
8] modeled target extensions using symmetric positive-definite random matrices, leveraging matrix-variate probability densities to describe their statistical properties. Bayesian formalism was applied to simultaneously estimate the target’s kinematics and shape. A Gaussian-mixture implementation of the PHD filter for extended targets was later proposed in [
9], alongside a method to reduce the number of considered partitions and possible alternatives. Building on these works, Karl Granström introduced an extended target tracking (ETT) framework based on the PHD filter, employing a gamma Gaussian inverse Wishart (GGIW) model for target state representation [
10]. Despite these advances, most existing methods are restricted to two-dimensional linear motion models, rendering them inapplicable to space-based radar systems with three-dimensional nonlinear observation dynamics.
In real space-based radar target tracking scenarios, the measurement noise is often unknown and time-varying. For traditional multi-target tracking methods, Gaussian distributions have commonly been used to represent the measurement noise statistics due to their mathematical simplicity and effectiveness. However, mismatch between the measurement noise parameters in the filter and those in the practical model leads to a significant deterioration in tracking accuracy. In [
11], the variational Bayesian (VB) method was applied to jointly and recursively estimate the dynamic state and the time-varying measurement noise parameters. Besides this, a factorized free-form distribution was proposed to approximate the joint posterior distribution of the target states and the measurement noise variances. Building on this work, Zhang et al. [
12] integrated the VB method into the PHD recursion, enabling joint estimation of the target states, target number, and measurement noise variances. However, this approach is limited to zero-mean Gaussian white noise. To address non-Gaussian noise, Li et al. [
13] investigated multi-target tracking under glint noise within the RFS framework. Their study modeled glint noise statistics using Student’s t-distribution and extended the PHD filter by augmenting the target state with noise parameters. Further advancing this line of research, Wang et al. proposed a variational Bayesian cardinalized probability hypothesis density (VB-CPHD) filtering algorithm tailored for Student’s t-distributed measurement noise [
14], enabling iterative estimations of multi-target states and noise inverse covariance. Meanwhile, Yang introduced a labeled iterated corrector probability hypothesis density (IC-PHD) filtering algorithm to estimate the mean of multi-sensor measurement noise [
15]; the VB method decouples the measurement noise covariance from multi-target states in the likelihood function. However, these existing methods were primarily designed for point targets. For extended target applications, the derivation of iterative processes becomes significantly more challenging.
To address the aforementioned challenges, we propose a robust tracking method for aerial extended targets with space-based wideband radar. First, we extend the GGIW-PHD filter to a three-dimensional observation framework, where the target’s spatial extent is modeled using an ellipsoidal representation. To enhance tracking accuracy under the highly nonlinear observation conditions inherent to space-based systems, we employ a third-order spherical–radial cubature rule to numerically integrate the density function during the recursive process. Furthermore, by incorporating the VB approximation framework, we derive closed-form solutions for the GGIW-PHD filter recursion under both Gaussian and non-Gaussian measurement noise models. This approach enables simultaneous estimation of the target state and time-varying measurement noise statistics, thereby improving tracking performance in scenarios with uncertain noise characteristics.
The remainder of this paper is organized as follows.
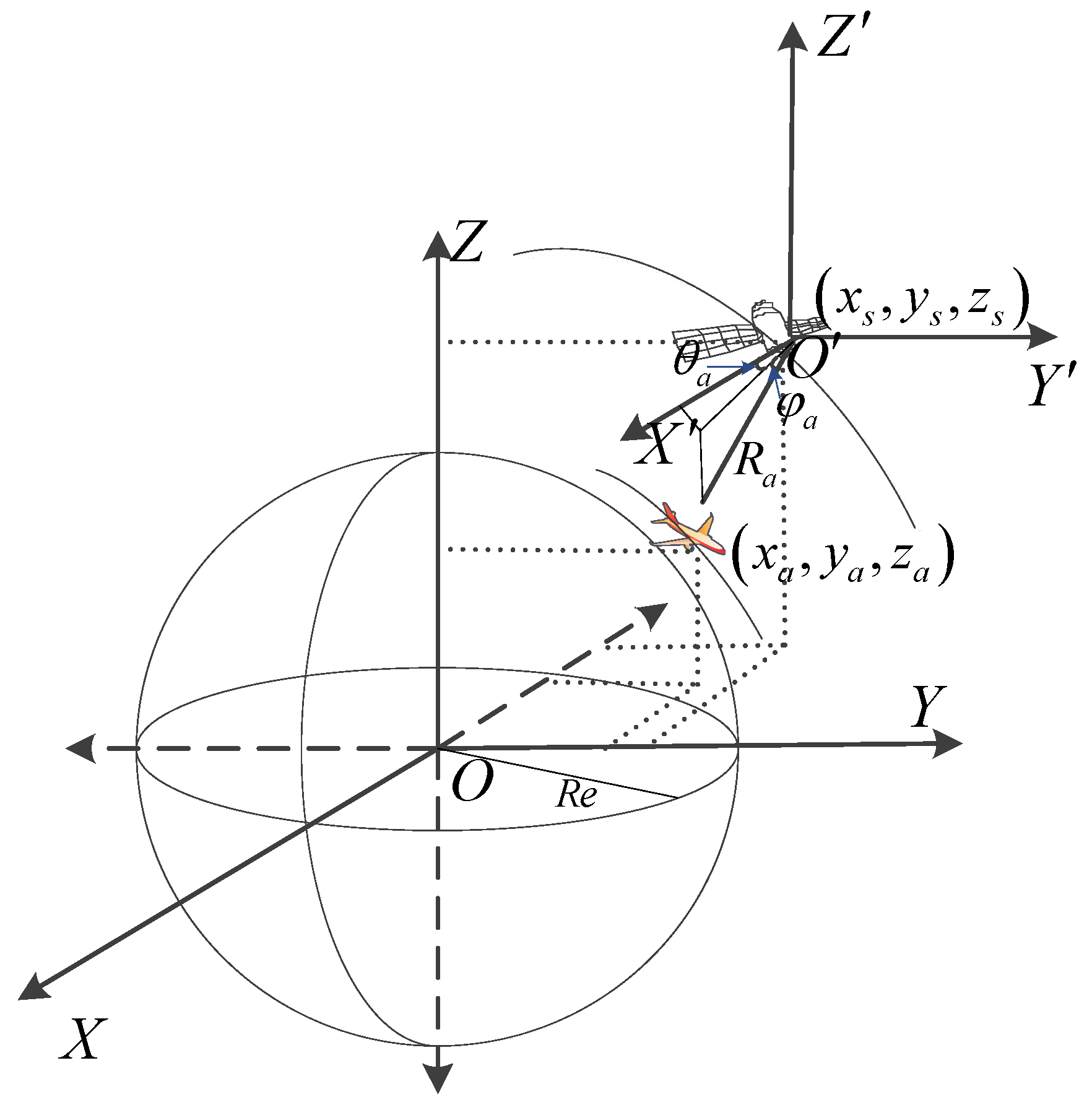
Section 2 establishes the space-based radar observation geometry and the extended target state model.
Section 3 presents the extension of the GGIW-PHD filter to three-dimensional space and the implementation of nonlinear filtering with a third-order spherical–radial cubature rule. In
Section 4, we derive the recursive formulation of GGIW-PHD-VB processing for both Gaussian and Student’s t-distribution noise models.
Section 5 provides an analysis of the simulation results. Finally,
Section 6 discusses the findings and potential future work, while
Section 7 concludes the paper.
3. GGIW-PHD Nonlinear Filtering for Space-Based Observations
For the GGIW-PHD filter, the extended target state and target motion can be estimated jointly. The random matrix model is used to describe the extended target shape, providing a balance between an informative shape representation and low computational complexity. However, in space-based radar three-dimensional observation scenarios, as shown in (2), the observation model exhibits strong nonlinearity. In [
16], a spherical–radial cubature rule was proposed to address high-dimensional nonlinear filtering problems, offering higher approximation accuracy than the extended Kalman filter and unscented Kalman filter. Therefore, in this section, the cubature Kalman filter (CKF) is incorporated into the GGIW-PHD recursions to handle strongly nonlinear models, and the recursive process is implemented using the third-order spherical–radial cubature rule. We denote this as GGIW-PHD-CKF. The detailed recursive procedure is described below.
The PHD
is an intensity function whose integral is the expected value of the number of targets and whose peaks correspond to likely target locations. For extended targets, the PHD intensity
at time
, given the measurements sets up to and including time
, is approximated via a mixture of GGIW distributions:
where
is the number of components,
is the weight of the
-th component, and
is the density parameter of the
-th component.
Assuming that the prior PHD intensity is in the form of (9), the predicted PHD intensity can be expressed as a GGIW mixture with two parts:
where
corresponds to new targets appearing in the surveillance area and
corresponds to targets that persist in the surveillance area. The probability of a target persisting in the surveillance area is modeled by the survival probability
. The birth measurement rate and extension are modeled using gamma and inverse Wishart distributions, respectively, while the velocity and acceleration are modeled using Gaussian distributions.
The PHD intensity
for existing targets that remain in the surveillance area is
where
The GGIW distribution parameters of
are expressed as
where
is the sampling time,
is the temporal decay,
is the forgetting factor, and
is the dimension of the random matrix
that describes the target’s size and shape. Additionally, for each Gaussian component characterized by mean
and covariance
, the predicted mean
and covariance matrix
are calculated through the following steps:
- (i)
Given , using Cholesky decomposition, we can obtain ;
- (ii)
According to the dimension of the target state vector , the number of cubature points is determined as . Then, the cubature points , for , can be generated from and based on the following equation:
where
,
,
is an identity matrix, and
represents the
-th column of
.
- (iii)
The propagated cubature points are calculated according to the nonlinear motion model equation for a single target:
- (iv)
The predicted mean and covariance are expressed as
The measurement updated PHD intensity based on the measurements up to time
can be expressed as
where
is the measurement pseudolikelihood, derived as follows:
The first part corresponds to missed detections, and the second part corresponds to detected targets. Here,
is the effective probability of detection;
is the average number of clutter returns per unit volume;
is the spatial distribution of the clutter over the surveillance volume;
is the likelihood function for a single target-generated measurement; and
represents that
partitions the measurement set
Zk into non-empty cells
W. As the size of the measurement set increases, the number of possible partitions grows very large. We adopt the density-based spatial clustering of applications with noise (DBSCAN) method [
17] to partition the measurement clusters. As a density-based clustering algorithm, DBSCAN starts with a randomly selected sample point and iteratively explores neighboring points within a specified radius until all samples are processed. This approach effectively identifies clusters of arbitrary shapes in noisy datasets.
The terms
ω and
represent non-negative coefficients defined for each partition
and cell
, respectively, as follows:
Then, the posterior PHD
can be denoted as a GGIW mixture form with three parts corresponding to previously existing targets that are not detected, new targets, and previously existing targets that continue to be detected:
- (i)
The PHD corresponding to new targets is
- (ii)
The updated PHD corresponding to previously existing targets that are not detected is as follows:
where
.
- (iii)
The PHD corresponding to previously existing targets that continue to be detected is updated according to the measurement model (7), and the detailed process is described as follows:
where the GGIW distribution parameters of
are expressed as
The centroid measurement of cell
is
Given the predicted mean and predicted covariance matrix , the measurement update can be calculated as follows:
- (i)
The prediction of cubature points is expressed as
- (ii)
The propagated cubature points are calculated via the observational model:
- (iii)
The predicted measurement is estimated as follows:
- (iv)
The state-measurement cross-covariance matrix is estimated as follows:
- (v)
The measurement innovation covariance matrix is estimated as follows:
The state update is calculated as follows:
Then,
is obtained via the Cholesky decomposition of
, i.e.,
.
The updated GGIW component weight is given by
where
is the measurement likelihood expressed as follows:
6. Discussion
Space-based radar systems enable the long-range detection and sustained stable tracking of aerial moving targets, significantly enhancing aerial early-warning capabilities. However, in the wideband tracking mode, target measurements exhibit extended characteristics. Moreover, under space-based long-distance observation conditions, the measurement equation becomes highly nonlinear, and the measurement noise uncertainty increases significantly. These factors pose major challenges to achieving high-precision and stable target tracking.
To address the challenge of tracking multiple extended targets within the RFS framework, R. Mahler first established the theoretical foundation by deriving the recursive formulation of the ET-PHD filter [
9]. Karl Granström et al. developed an enhanced tracking approach based on the PHD filter, enabling simultaneous estimation of both the target kinematics and spatial extension [
10]. However, these pioneering methods were limited to two-dimensional linear motion models, making them unsuitable for space-based radar applications characterized by three-dimensional nonlinear observation geometries. In this study, we established a comprehensive space-based radar observation model and extended the GGIW-PHD filter to accommodate three-dimensional nonlinear observation scenarios. Additionally, the third-order spherical–radial cubature rule was incorporated to enable accurate numerical integration of the density function during the nonlinear system’s recursive estimation process. Through simulations of three-dimensional aerial extended target tracking in
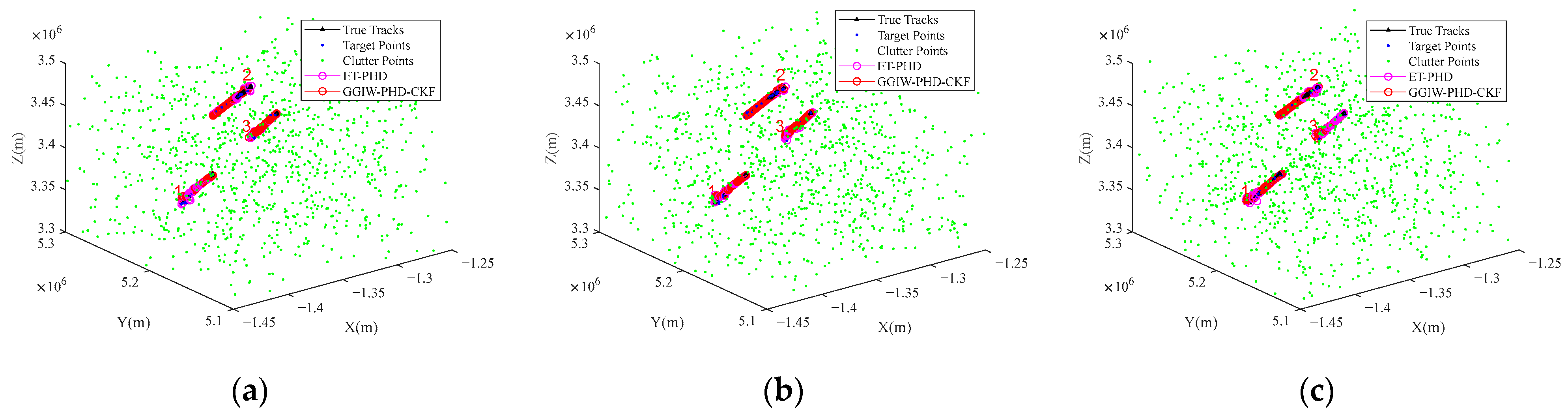
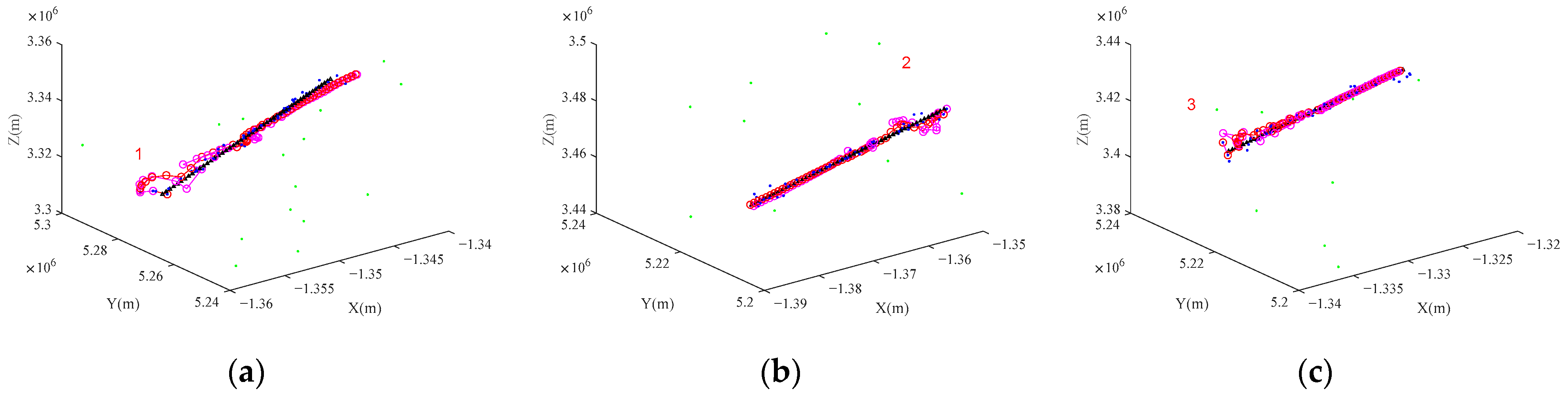
Section 5.2, we demonstrated that the GGIW-PHD-CKF exhibits superior adaptability to targets with varying shape parameters when compared to the conventional ET-PHD filter. Comparisons of the OSPA distance and RMSE showed that GGIW-PHD-CKF has a faster convergence speed and better tracking accuracy.
Furthermore, for the problem of unknown and time-varying measurement noise, the VB method was introduced into the PHD recursion for Gaussian white noise with a zero-mean [
12]. In this way, the target states, target number, and measurement noise variances could be jointly estimated. In [
14], Wang et al. proposed a VB-CPHD filtering algorithm for measurement noise following Student’s t-distribution. However, the above methods were designed for point targets and are not suitable for extended targets. Therefore, we derived the closed solution to the GGIW-PHD-CKF-VB filter recursion process with Gaussian and non-Gaussian measurement noise models. The simulation experiments in
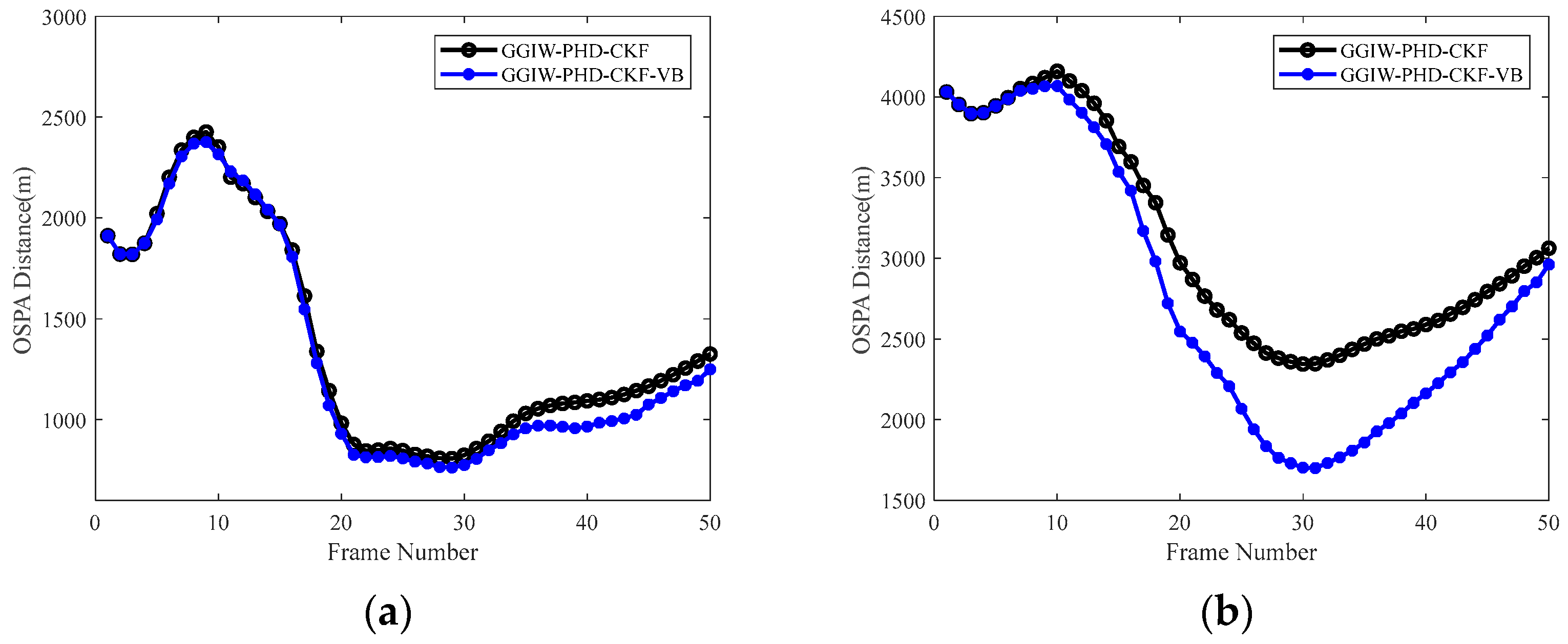
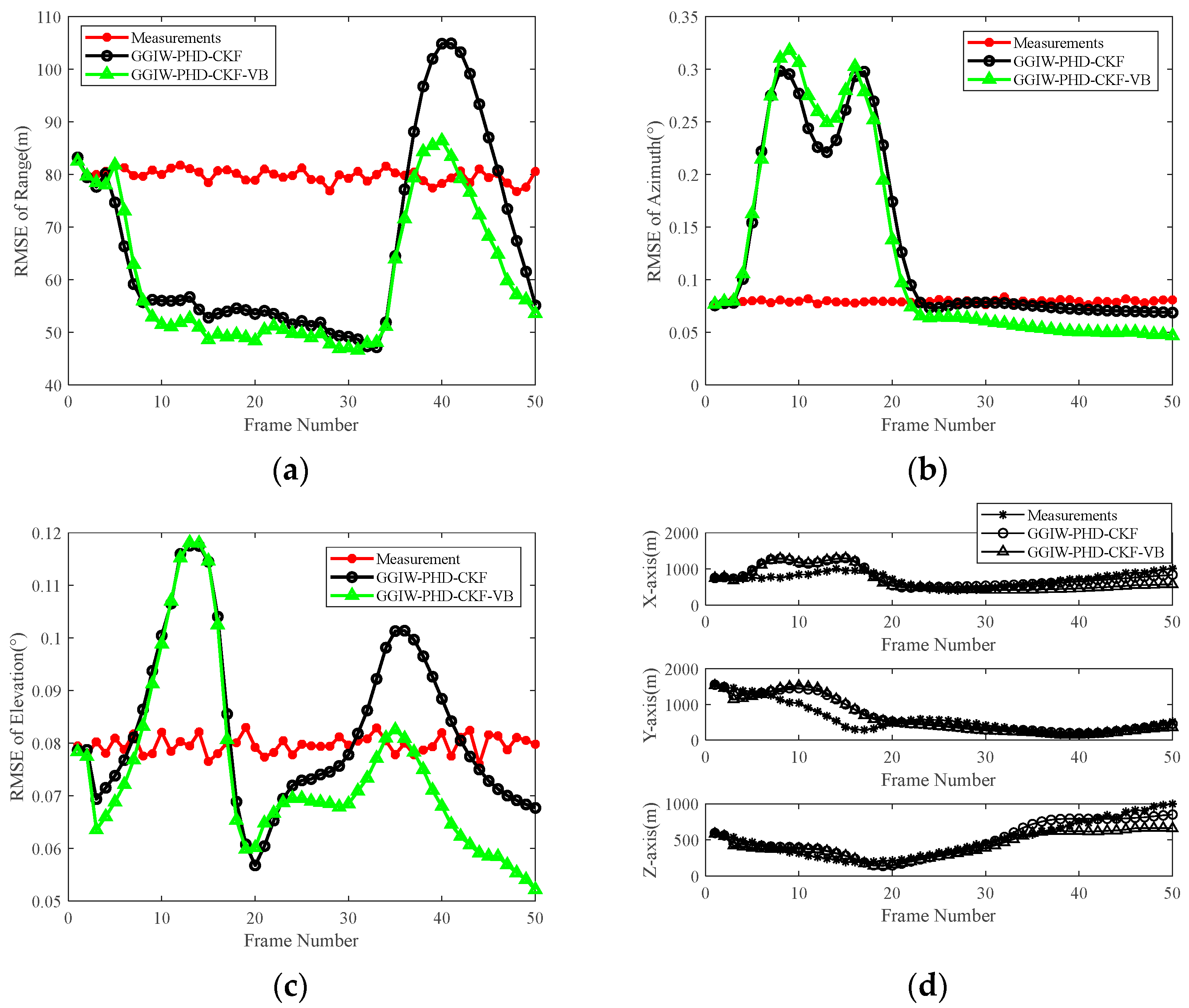
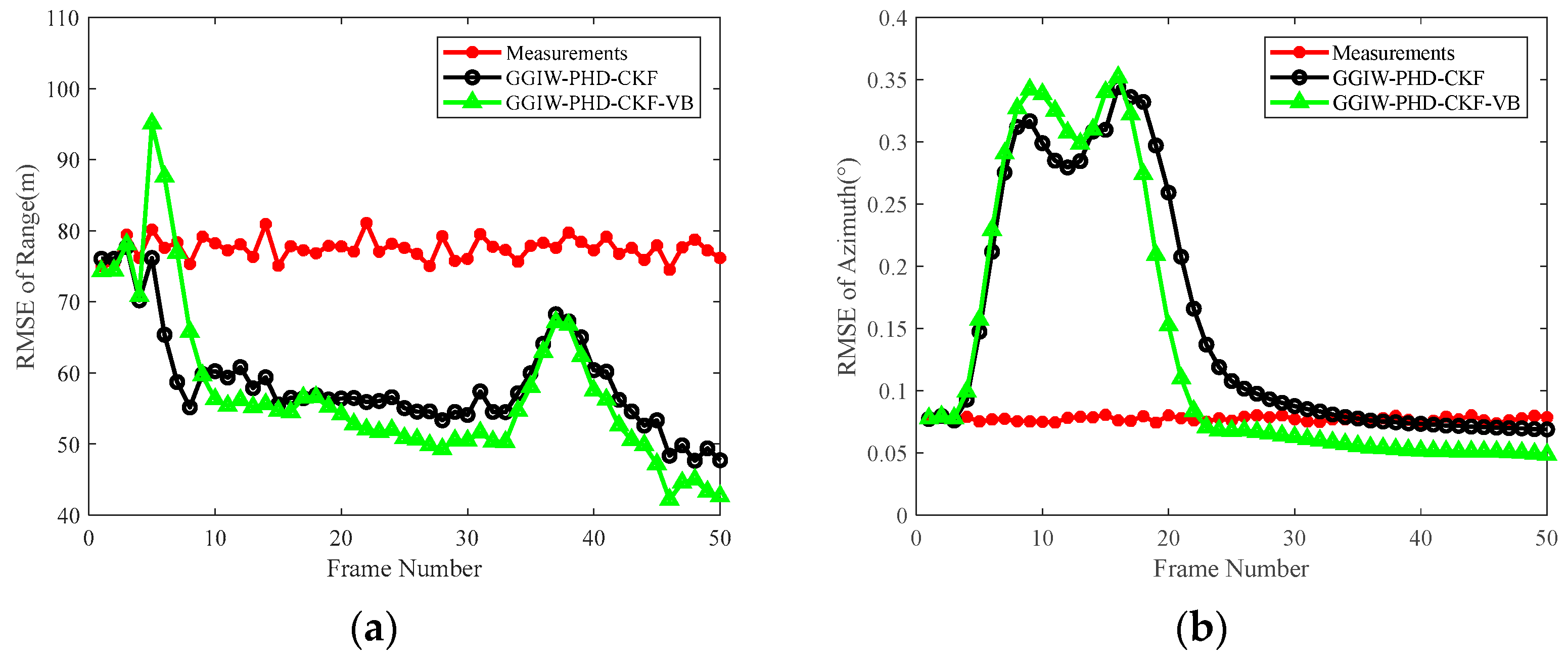
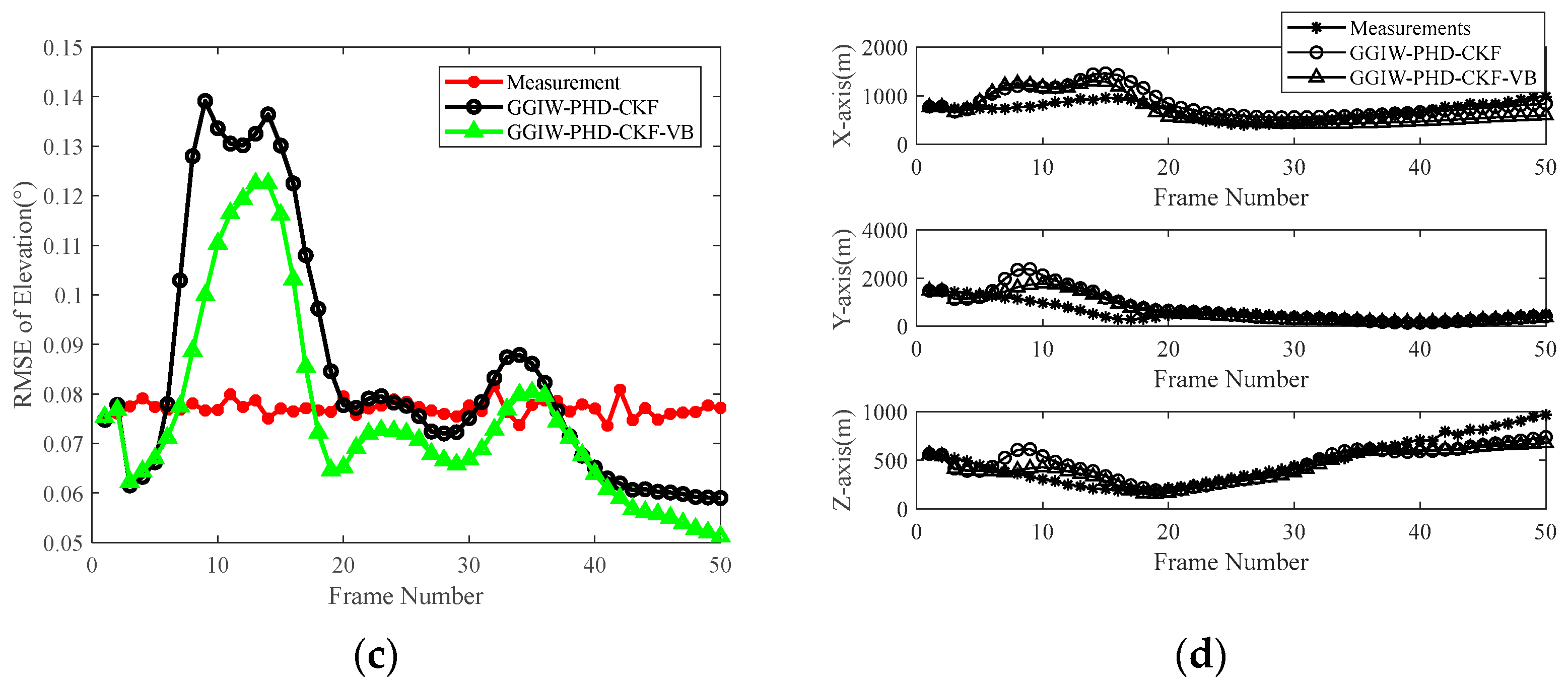
Section 5.3 analyzed tracking accuracy under two distinct scenarios. The tracking results under various noise parameters demonstrated that compared with the GGIW-PHD-CKF, the GGIW-PHD-CKF-VB filter achieved lower OSPA distance and RMSE values, showing stronger robustness under different scenario parameters.
We also conducted a comparative analysis of time consumption. Simulation experiments were performed in MATLAB R2019a on a computer equipped with a 2.30-GHz Intel® Core™ processor and 16 GB of RAM. Averaged over multiple Monte Carlo runs, the ET-PHD method required 5.8 ms. In Gaussian measurement noise scenarios, the GGIW-PHD-CKF and GGIW-PHD-CKF-VB filters consumed 4.9 ms and 5.1 ms, respectively. In non-Gaussian measurement noise scenarios, the GGIW-PHD-CKF and GGIW-PHD-CKF-VB filters consumed 5.0 ms and 5.3 ms, respectively. Consequently, the GGIW-PHD-CKF-VB filter demonstrated superior computational efficiency compared to the ET-PHD method. In addition, the sampling intervals for aircraft target tracking are typically 5 s to 10 s [
21]. The computational complexity of the proposed method has a considerable margin for engineering applications. However, the time consumption of practical radar target tracking is also related to factors such as the number of targets in the surveillance area and the processing capability of the hardware system, necessitating comprehensive evaluations across multiple dimensions.
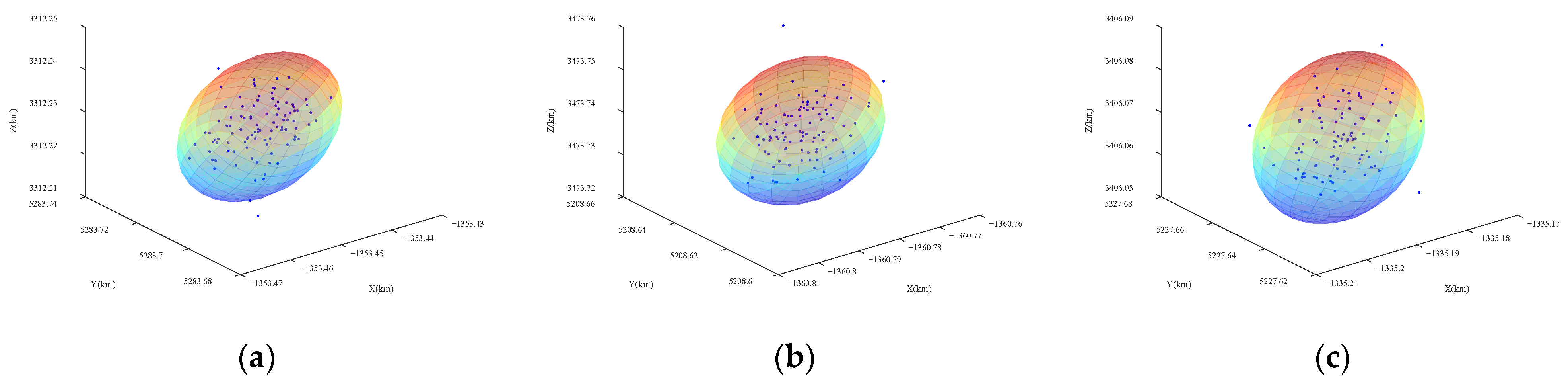
Building upon this research, future studies could be conducted to explore the following two aspects: (i) The current ellipsoidal modeling of extended targets presents certain limitations. More sophisticated and flexible shape representation methods should be investigated to better characterize target measurement distributions across varying observation angles. (ii) While this work focused on monostatic radar configurations, distributed multistatic designs could significantly enhance the tracking accuracy by enabling multi-perspective observation and mutual coverage compensation. Subsequent research should extend the proposed methodology to multistatic radar tracking scenarios.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}