
Generalized Ambiguity Function for Bistatic FDA Radar Joint Velocity, Range, and Angle Parameters

 , , ,
, , ,
Abstract

1. Introduction
2. Bistatic Radar System
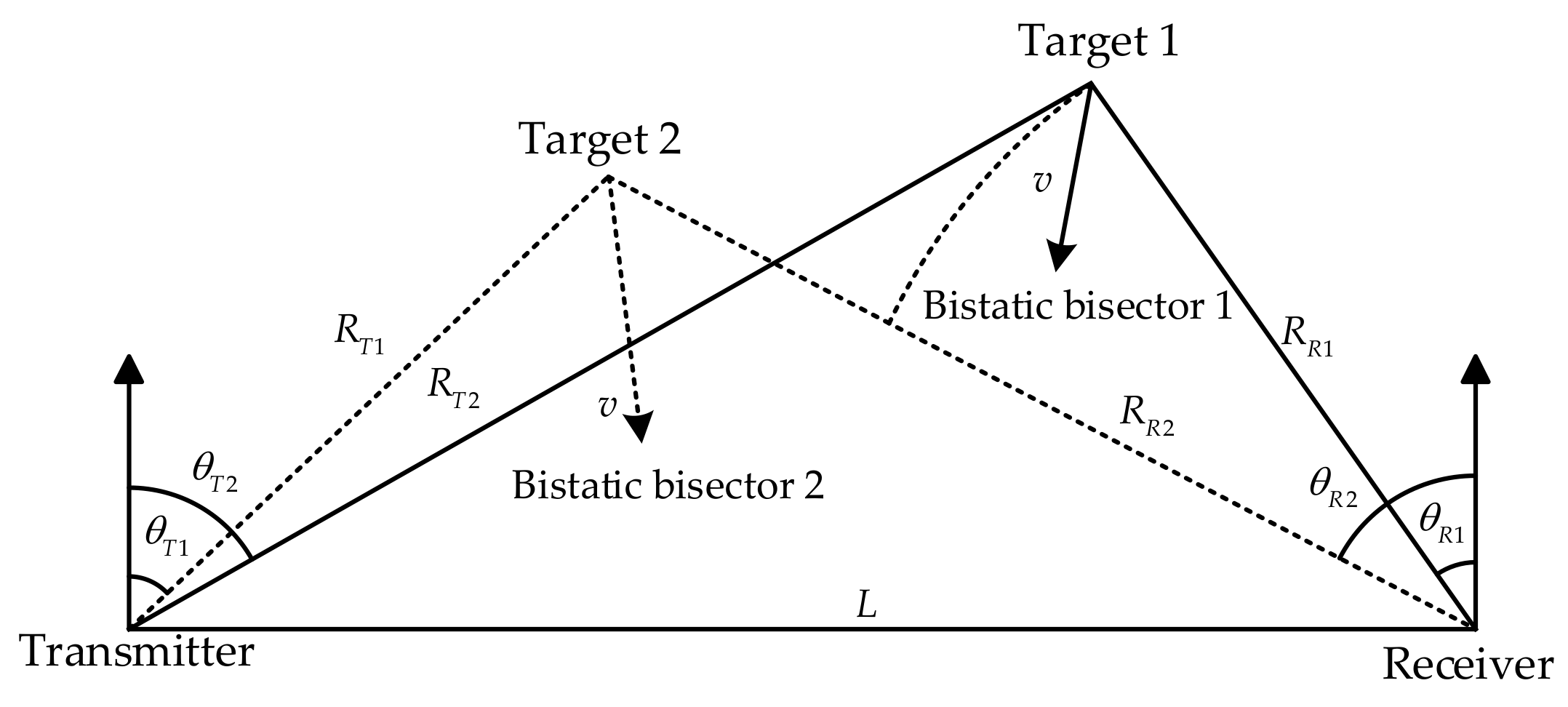
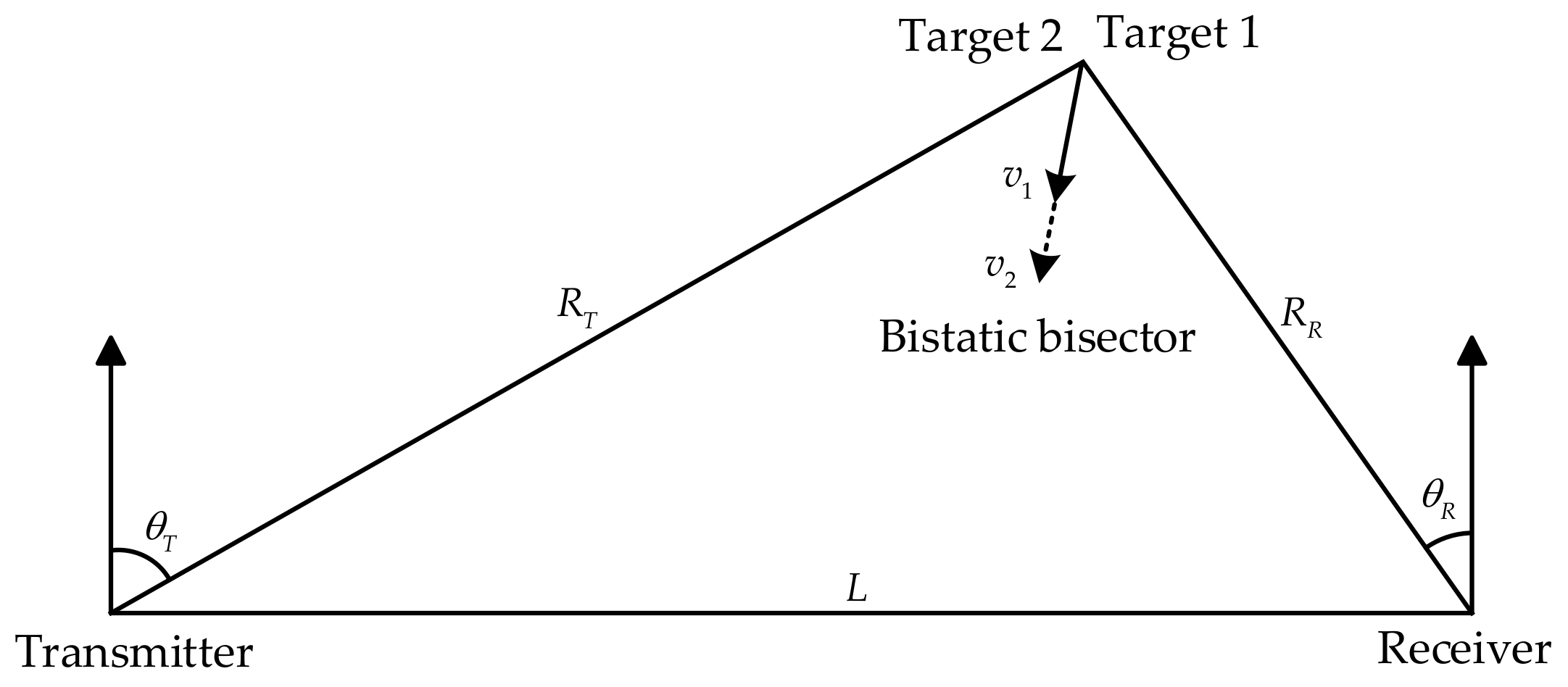
2.1. North-Referenced Coordinate System and Geometry of the Bistatic Radar
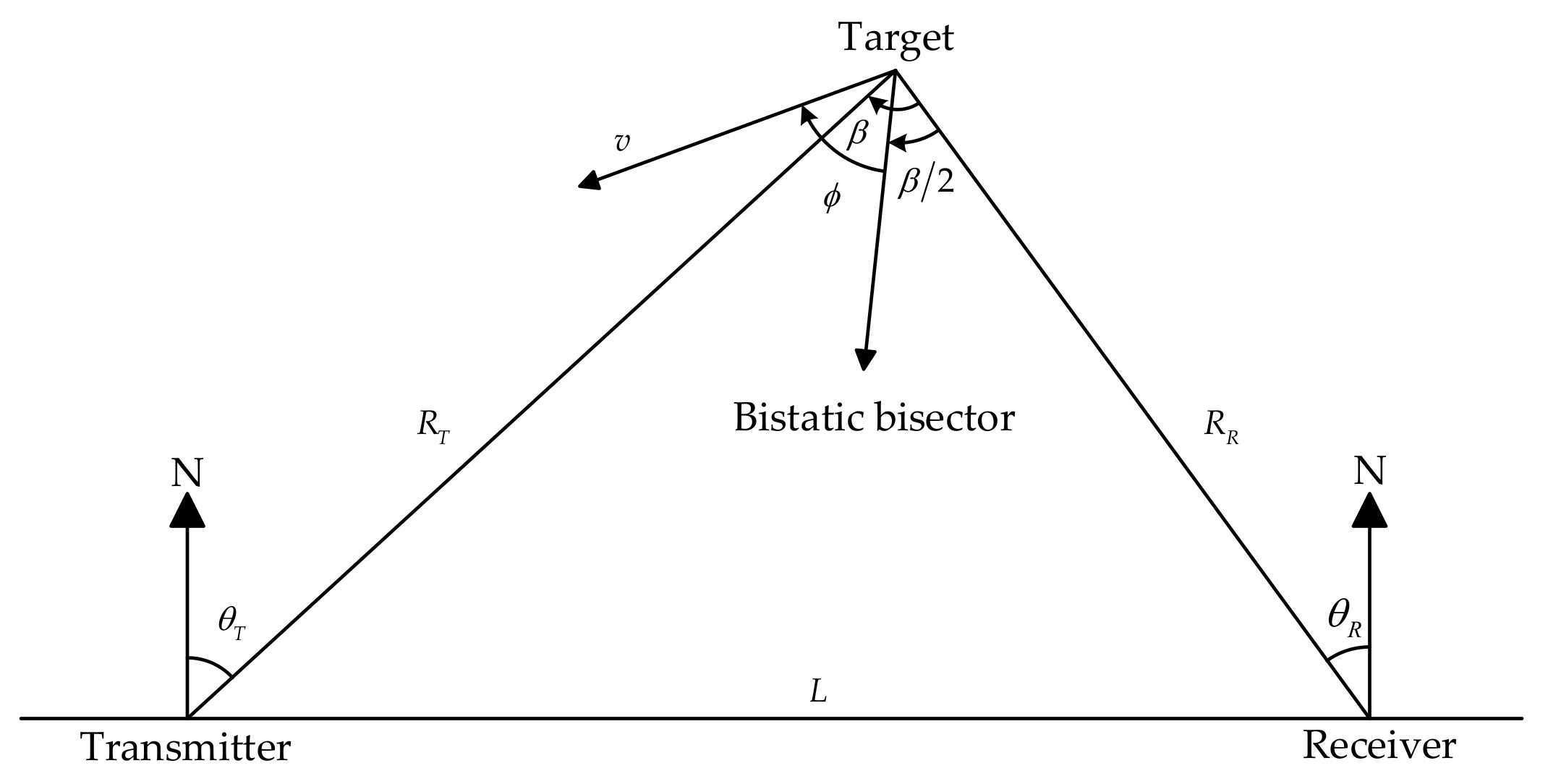
2.2. Effects of Bistatic Radar Geometry on the Time Delay and Doppler Shift
- Slowly fluctuating target: If a target’s RCS remains relatively stable, exhibiting full pulse-to-pulse correlation within a scan period, and the amplitude distribution follows the Swerling III (chi square distribution) model (when the target is a primary scatterer), it can be considered as a slowly fluctuating target;
- Point target: Assume that there is a target in the propagation direction of an electromagnetic pulse which has scatterers distributed over the range interval . Let represent the moment at which the pulse’s leading edge enters range , where . The moment the leading edge of the pulse emerges at the transmitting antenna is assumed to be the time origin. If denotes the duration of the transmitted pulse, the target can be treated as a point target as long as .
3. Generalized Ambiguity Function of Bistatic FDA Radar
3.1. Signal Model of Bistatic FDA Radar

3.2. Generalized Ambiguity Function of Bistatic FDA Radar
3.3. Computational Complexity Analysis and Practical Application Limitations of Bistatic FDA Radar’s GAF
- represents a Hermitian inner product of two N-dimensional vectors. Each element-wise multiplication and summation contributes complexity.
- The Hadamard product involves element-wise multiplication of two M-dimensional vectors, resulting in complexity.
- , with is an M × M matrix, the operation combines a 1 × M vector, an M × M matrix, and an M × 1 vector. Matrix–vector multiplication for an M × M matrix and M–vector dominates with complexity.
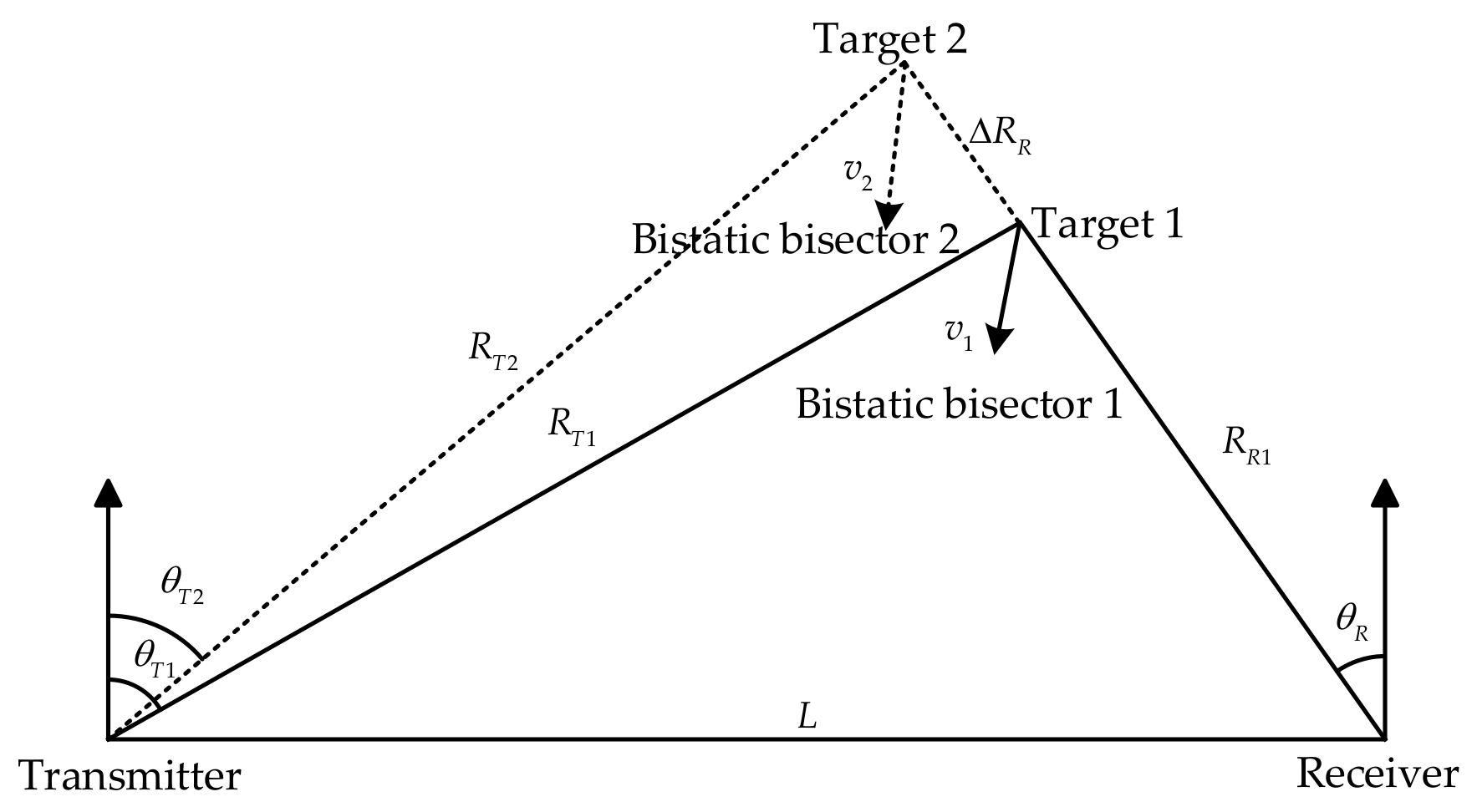
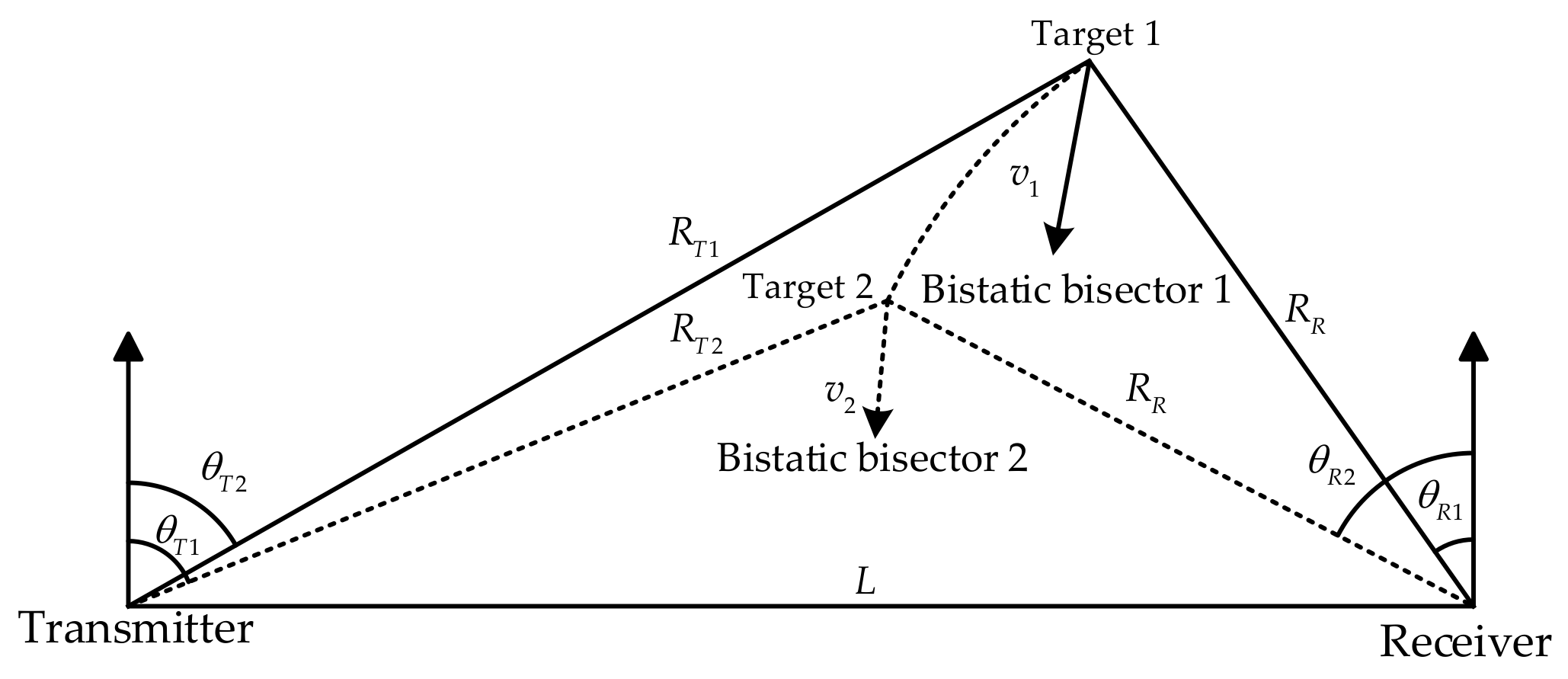
4. Numerical Simulations and Analysis
- The bistatic baseline length ;
- Reception distance , reception angle, and velocity of Target 1, which is regarded as the reference target, and the direction of velocity parameter is along the bistatic bisector;
- Parameters of Target 2, with the differential parameters relative to Target 1 are defined as , , .
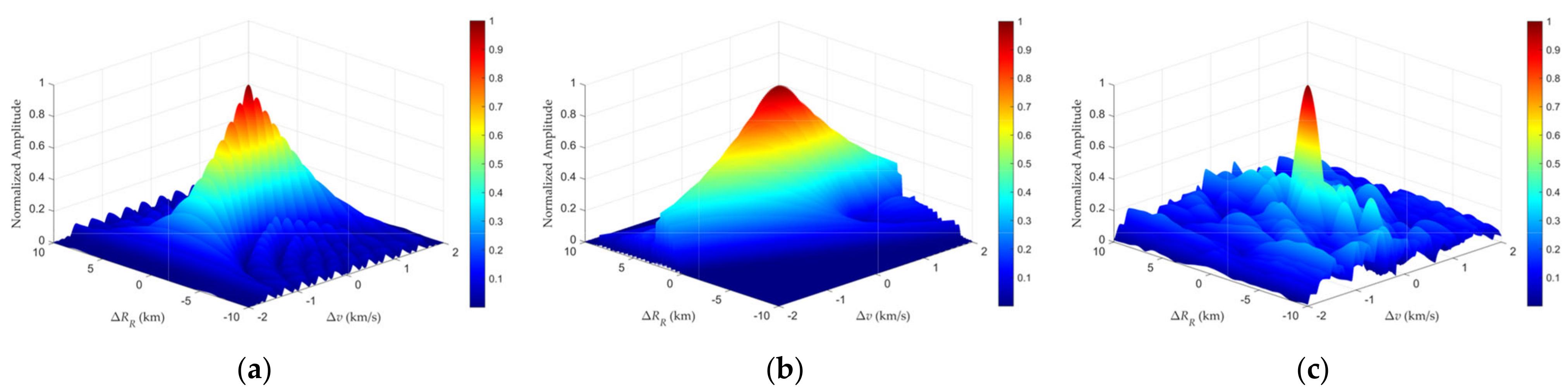
4.1. Influence of Transmitted Signal
- Single-tone waveform ;
- Linear-frequency-modulated (LFM) waveform ,
- Linear frequency offset ;
- Random frequency offset .
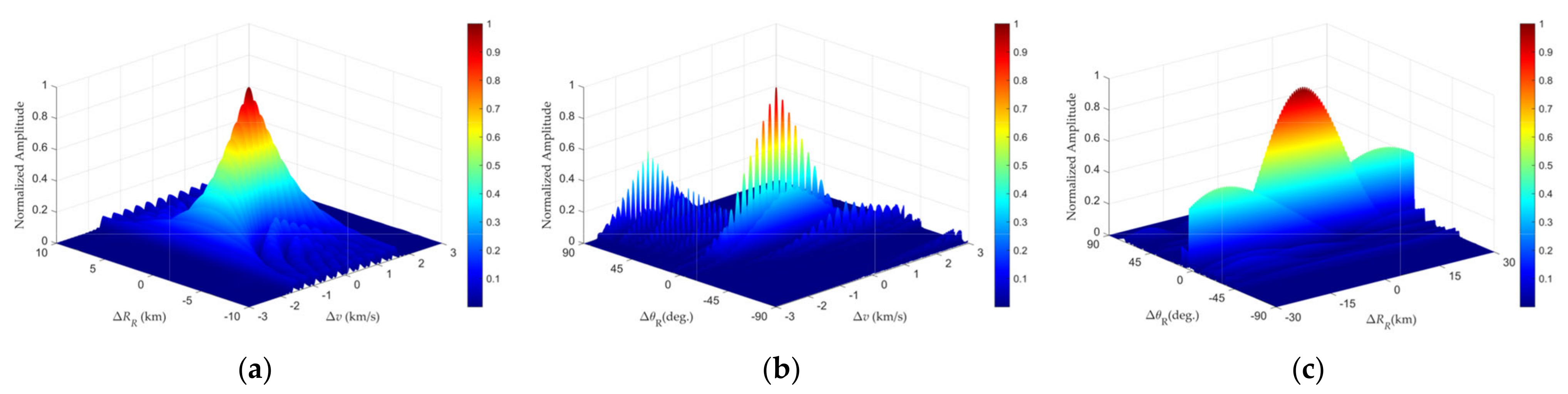
4.1.1. Range–Velocity GAF
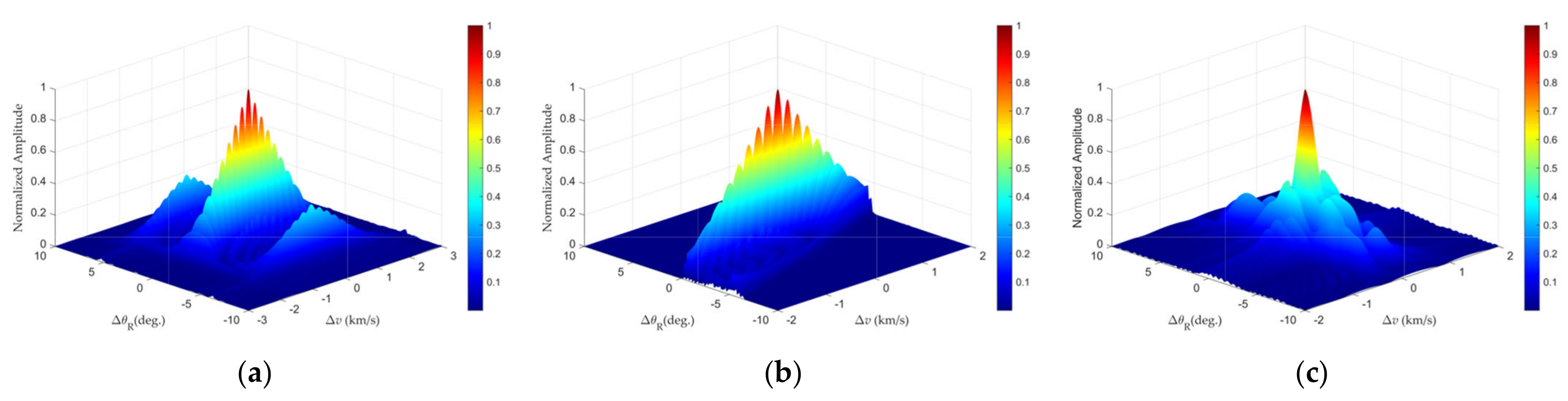
4.1.2. Angle–Velocity GAF
4.1.3. Angle–Range GAF
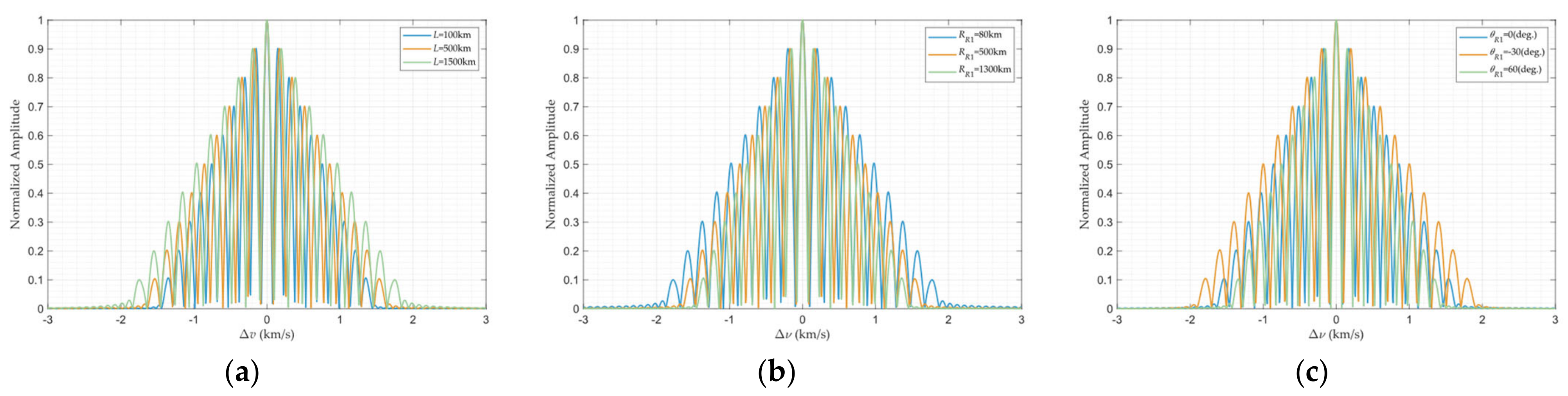
4.2. Influence of Bistatic Geometric Configurations
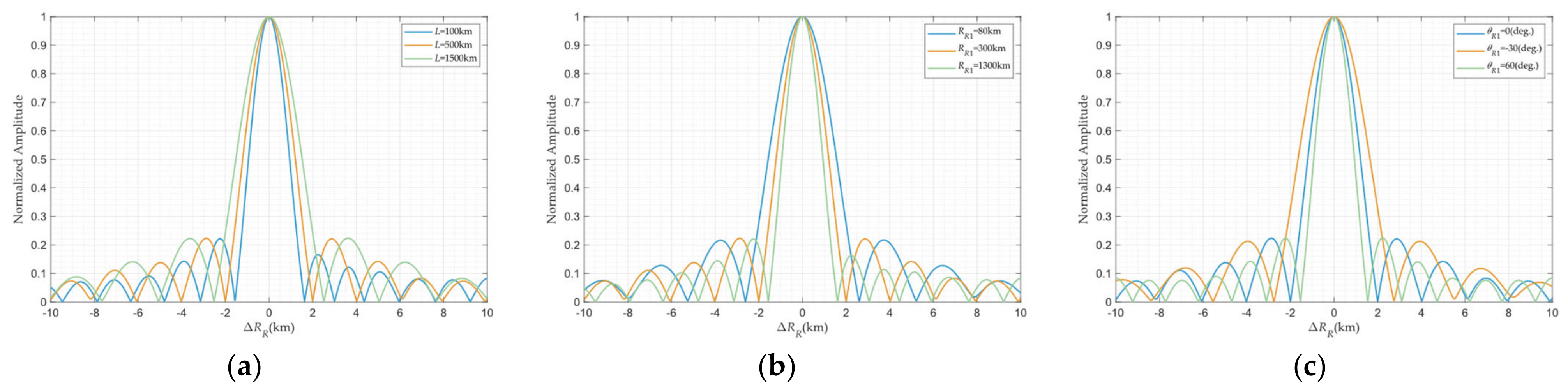
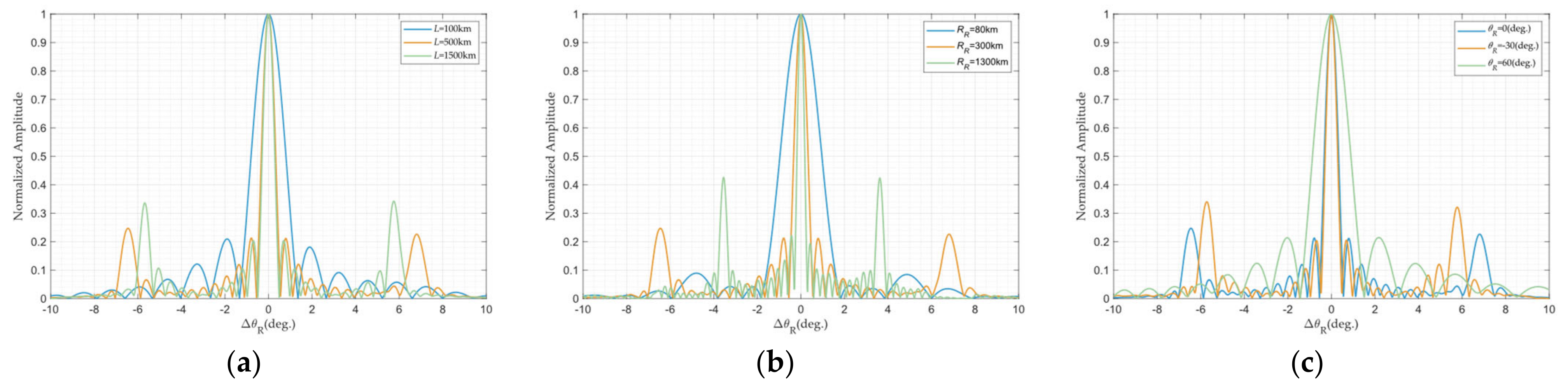
- Cases 1–3 modify baseline length ;
- Cases 4–6 adjust target–receiver range ;
- Cases 7–9 alter reception angle .
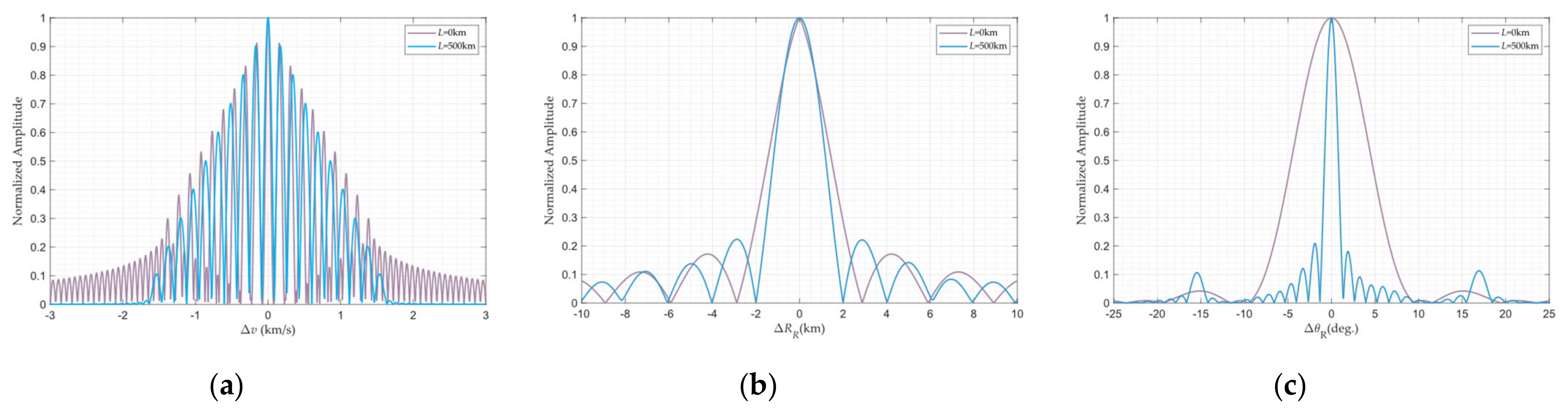
4.2.1. Velocity GAF
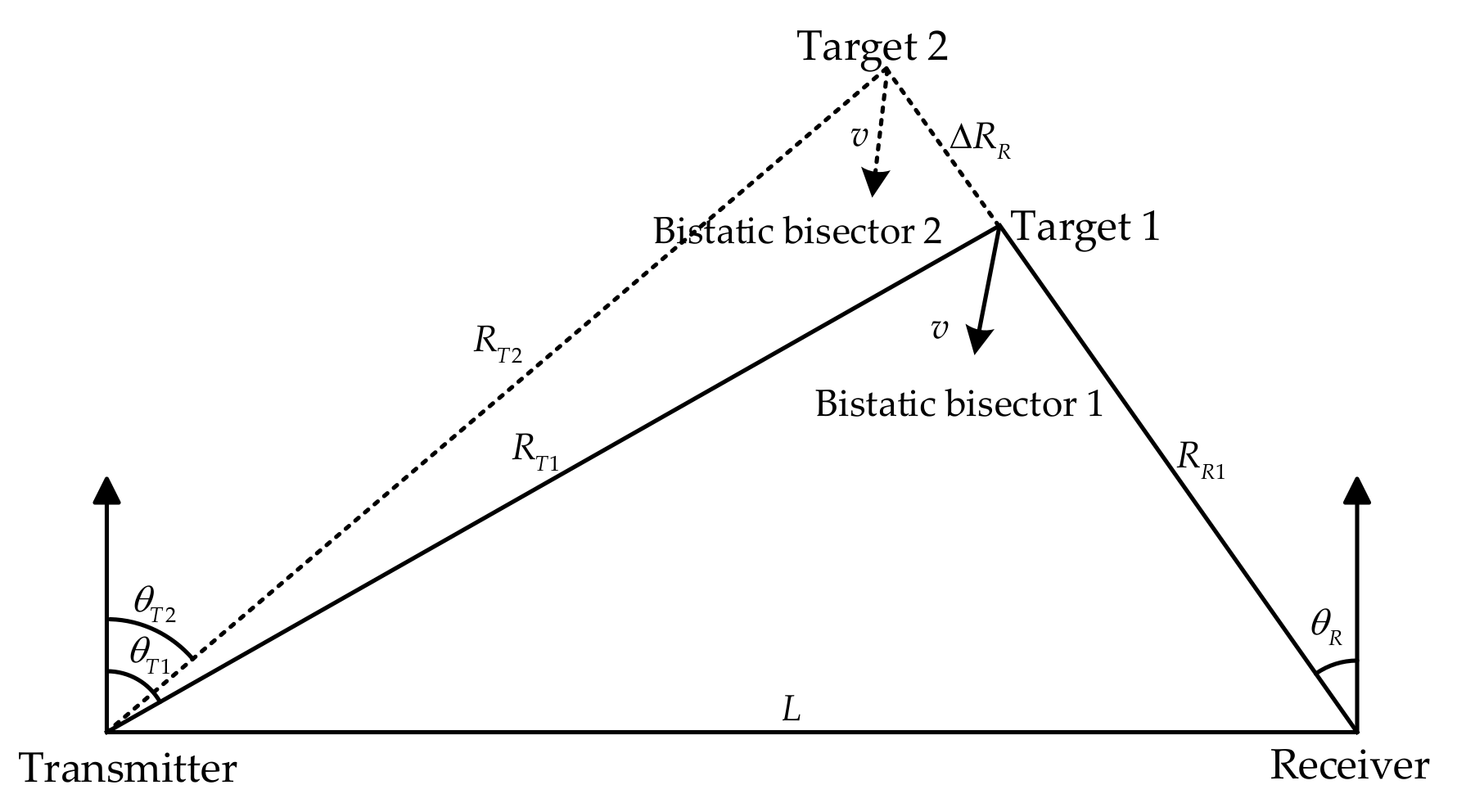
4.2.2. Range GAF
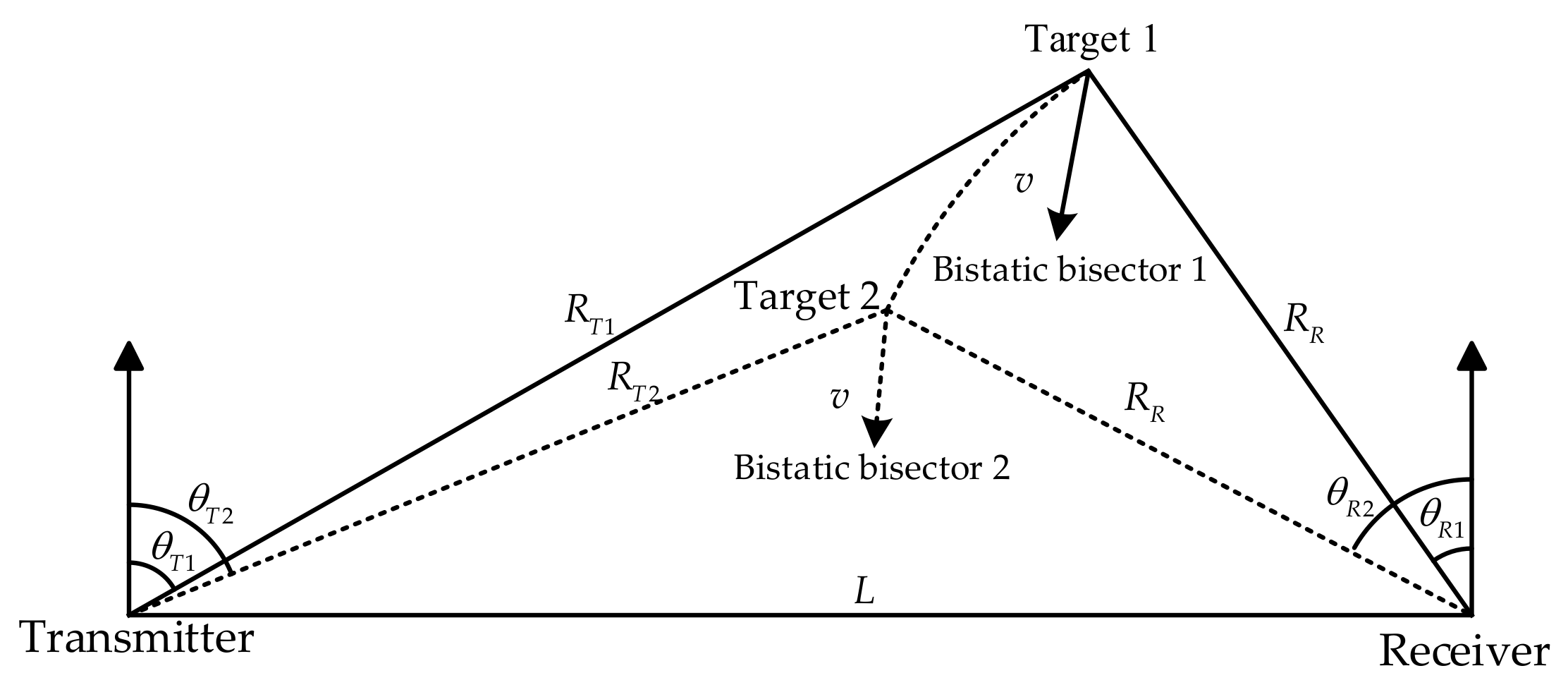
4.2.3. Angle GAF
4.3. Differences from Monostatic FDA Radar GAF
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FDA | Frequency diverse array |
| GAF | Generalized ambiguity function |
| MLJ | Main-lobe jamming |
| RCS | Radar cross-section |
| RAMs | Radar-absorbent materials |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| BDS | Beidou Navigation Satellite Systems |
| SNR | Signal-to-noise ratio |
| PA | Phased array |
| DBF | Digital beam forming |
| PRF | Pulse repetition frequency |
| AF | Ambiguity function |
| SISO | Single-input single-output |
| MIMO | Multi-input multioutput |
| ULA | Uniform linear array |
| DFRC | Dual-function radar and communication |
| JRC | Joint radar and communication |
| DOA | Direction-of-arrival |
References
- Jackson, M. The geometry of bistatic radar systems. IEE Proc. F (Commun. Radar Signal Process.) 1986, 133, 604–612. [Google Scholar] [CrossRef]
- Willis, N.J. Bistatic Radar; SciTech Publishing: Raleigh, NC, USA, 2005; Volume 2. [Google Scholar]
- Cherniakov, M. Bistatic Radar: Emerging Technology; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Wang, Y.; Luo, H.; Shao, Y.; Wang, H.; Liu, T.; Wang, Z.; Liu, K.Y.; Su, X.; Xu, H.X. Detection and Anti-Detection with Microwave-Infrared Compatible Camouflage Using Asymmetric Composite Metasurface. Adv. Sci. 2024, 11, 2410364. [Google Scholar] [CrossRef] [PubMed]
- Willis, N.J.; Griffiths, H.D. Advances in Bistatic Radar; SciTech Publishing: Raleigh, NC, USA, 2007; Volume 2. [Google Scholar]
- Kesheng, L. An analysis of some problems of bistatic and multistatic radars. In Proceedings of the 2003 Proceedings of the International Conference on Radar (IEEE Cat. No. 03EX695), Adelaide, Australia, 3–5 September 2003; pp. 429–432. [Google Scholar]
- Yulin, H.; Jianyu, Y.; Jintao, X. Synchronization technology of bistatic radar system. In Proceedings of the 2006 International Conference on Communications, Circuits and Systems, Guilin, China, 25–28 June 2006; pp. 2219–2221. [Google Scholar]
- Fang, P.; Jizhang, Z.; Yufeng, C. A Method of Time and Frequency Synchronizati on Based on Beidou Satellite for Bistatic Radar. J. Proj. Rocket. Missiles Guid. 2007, 27, 18–20. [Google Scholar]
- Geudtner, D.; Zink, M.; Gierull, C.; Shaffer, S. Interferometric alignment of the X-SAR antenna system on the space shuttle radar topography mission. IEEE Trans. Geosci. Remote Sens. 2002, 40, 995–1006. [Google Scholar] [CrossRef]
- Hanle, E. Survey of bistatic and multistatic radar. IEE Proc. F (Commun. Radar Signal Process.) 1986, 133, 587–595. [Google Scholar] [CrossRef]
- Purdy, D.S. Receiver antenna scan rate requirements needed to implement pulse chasing in a bistatic radar receiver. IEEE Trans. Aerosp. Electron. Syst. 2002, 37, 285–288. [Google Scholar] [CrossRef]
- Moyer, L.; Purdy, D. Comments on Receiver antenna scan rate requirements needed to implement pulse chasing in a bistatic radar receiver. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 300–301. [Google Scholar] [CrossRef]
- Matsuda, S.; Hashiguchi, H.; Fukao, S. A study on multibeam pulse chasing for bistatic radar. Electron. Commun. Jpn. (Part I Commun.) 2006, 89, 11–21. [Google Scholar] [CrossRef]
- Cox, P.B.; van Rossum, W.L. Analysing multibeam, cooperative, ground based radar in a bistatic configuration. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 912–917. [Google Scholar]
- Antonik, P.; Wicks, M.C.; Griffiths, H.D.; Baker, C.J. Frequency diverse array radars. In Proceedings of the 2006 IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; p. 3. [Google Scholar]
- Secmen, M.; Demir, S.; Hizal, A.; Eker, T. Frequency diverse array antenna with periodic time modulated pattern in range and angle. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 427–430. [Google Scholar]
- Huang, J.; Tong, K.-F.; Baker, C. Frequency diverse array with beam scanning feature. In Proceedings of the 2008 IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–11 July 2008; pp. 1–4. [Google Scholar]
- Tan, M.; Wang, C.; Li, Z. Correction analysis of frequency diverse array radar about time. IEEE Trans. Antennas Propag. 2020, 69, 834–847. [Google Scholar] [CrossRef]
- Rothstein, J. Probability and Information Theory, with Applications to Radar. PM Woodward. McGraw-Hill, New York; Pergamon Press, London, 1953. 128 pp. Illus. $4.50. Science 1954, 119, 874. [Google Scholar] [CrossRef]
- San Antonio, G.; Fuhrmann, D.R.; Robey, F.C. MIMO radar ambiguity functions. IEEE J. Sel. Top. Signal Process. 2007, 1, 167–177. [Google Scholar] [CrossRef]
- Celik, O.O.; Tuncer, T.E. MIMO radar beampattern design by using Phased-Costas waveforms with PAR constraints employing a generalized ambiguity function. Digit. Signal Process. 2023, 135, 103948. [Google Scholar] [CrossRef]
- Chen, Z.; Liang, J.; Song, K.; Yang, Y.; Deng, X. On designing good doppler tolerance waveform with low PSL of ambiguity function. Signal Process. 2023, 210, 109075. [Google Scholar] [CrossRef]
- Wang, W.-Q.; Dai, M.; Zheng, Z. FDA radar ambiguity function characteristics analysis and optimization. IEEE Trans. Aerosp. Electron. Syst. 2017, 54, 1368–1380. [Google Scholar] [CrossRef]
- Gui, R.; Huang, B.; Wang, W.-Q.; Sun, Y. Generalized ambiguity function for FDA radar joint range, angle and Doppler resolution evaluation. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Tsao, T.; Slamani, M.; Varshney, P.; Weiner, D.; Schwarzlander, H.; Borek, S. Ambiguity function for a bistatic radar. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 1041–1051. [Google Scholar] [CrossRef]
- Chen, H.-W.; Li, X.; Yang, J.; Zhou, W.; Zhuang, Z. Effects of geometry configurations on ambiguity properties for bistatic MIMO radar. Prog. Electromagn. Res. B 2011, 30, 117–133. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, Y.; Liao, G.; Xu, Y.; Wang, W. Angle-Dependent Matched Filtering for Moving Target Indication With Coherent FDA Radar. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 3523–3536. [Google Scholar] [CrossRef]
- Lan, L.; Rosamilia, M.; Aubry, A.; De Maio, A.; Liao, G. FDA-MIMO transmitter and receiver optimization. IEEE Trans. Signal Process. 2024, 72, 1576–1589. [Google Scholar] [CrossRef]
- Hyder, M.M.; Mahata, K.; Hasan, S.M. A new target localization method for bistatic FDA radar. Digit. Signal Process. 2021, 108, 102902. [Google Scholar] [CrossRef]
- Fang, Y.; Zhu, S.; Liao, B.; Li, X.; Liao, G. Target Localization With Bistatic MIMO and FDA-MIMO Dual-Mode Radar. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 952–964. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, W.; Zhang, Q.; Zhang, L.; Liu, B.; Xu, H.-X. Joint Power, Bandwidth, and Subchannel Allocation in a UAV-Assisted DFRC Network. IEEE Internet Things J. 2025, 12, 11633–11651. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, W.; Zhang, Q.; Liu, B. Joint customer assignment, power allocation, and subchannel allocation in a UAV-based joint radar and communication network. IEEE Internet Things J. 2024, 11, 29643–29660. [Google Scholar] [CrossRef]
- Zhang, H.; Weijian, L.; Zhang, Q.; Taiyong, F. A robust joint frequency spectrum and power allocation strategy in a coexisting radar and communication system. Chin. J. Aeronaut. 2024, 37, 393–409. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Y.; Wen, F.; He, J.; Truong, T.-K. EMVS-MIMO radar with sparse Rx geometry: Tensor modeling and 2-D direction finding. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8062–8075. [Google Scholar] [CrossRef]
- Qi, C.; Xie, J.; Zhang, H.; Liu, W.; Feng, W.; Zheng, G. Optimizing low-grazing angle detection for maneuvering targets in cognitive MIMO radar networks: A shapley value approach. IEEE Trans. Veh. Technol. 2024, 74, 4977–4992. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | (GHz) | (kHz) | (MHz/s) | ||
|---|---|---|---|---|---|
| Value | 12 | 10 | 10 | 10 | 500 |
| Parameter | (ms) | (m/s) | (deg.) | ||
| Value | 0.2 | 500 | 500 | 300 | −30 |
| Parameter | (GHz) | (kHz) | (ms) | (m/s) | ||
|---|---|---|---|---|---|---|
| Value | 12 | 10 | 10 | 10 | 0.2 | 500 |
| (km) | (km) | (deg.) | |
|---|---|---|---|
| Case 1 | 100 | 300 | −30 |
| Case 2 | 500 | 300 | −30 |
| Case 3 | 1500 | 300 | −30 |
| Case 4 | 500 | 80 | −30 |
| Case 5 | 500 | 300 | −30 |
| Case 6 | 500 | 1300 | −30 |
| Case 7 | 500 | 300 | −30 |
| Case 8 | 500 | 300 | 0 |
| Case 9 | 500 | 300 | 60 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Xie, J.; Ding, Z.; Zhang, M.; Zhang, H.; Zhai, H.; Han, W. Generalized Ambiguity Function for Bistatic FDA Radar Joint Velocity, Range, and Angle Parameters. Remote Sens. 2025, 17, 1784. https://doi.org/10.3390/rs17101784
Gao X, Xie J, Ding Z, Zhang M, Zhang H, Zhai H, Han W. Generalized Ambiguity Function for Bistatic FDA Radar Joint Velocity, Range, and Angle Parameters. Remote Sensing. 2025; 17(10):1784. https://doi.org/10.3390/rs17101784
Chicago/Turabian StyleGao, Xuchen, Junwei Xie, Zihang Ding, Mengdi Zhang, Haowei Zhang, Haolong Zhai, and Weihang Han. 2025. "Generalized Ambiguity Function for Bistatic FDA Radar Joint Velocity, Range, and Angle Parameters" Remote Sensing 17, no. 10: 1784. https://doi.org/10.3390/rs17101784
APA StyleGao, X., Xie, J., Ding, Z., Zhang, M., Zhang, H., Zhai, H., & Han, W. (2025). Generalized Ambiguity Function for Bistatic FDA Radar Joint Velocity, Range, and Angle Parameters. Remote Sensing, 17(10), 1784. https://doi.org/10.3390/rs17101784