


Space–Air–Ground–Sea Integrated Network with Federated Learning




Abstract
1. Introduction
1.1. SAGSIN
1.2. FL
1.3. Contributions
- We summarize the SAGSIN and FL state of the art, respectively. Then, we also review FL-based SAGSIN applications. After that, we provide a detailed overview of FL-based SAGSINs.
- We detail the challenges and practical problems in FL-based SAGSINs, where heterogeneous networks, multiple transmission media, and heterogeneous data impact performance. We summarize its benefits, disadvantages, and future directions.
- To better understand the problems in SAGSINs, we present two typical cases. Aiming at a multi-scale delay problem of SAGSINs, we propose a delay-aware FL to minimize the time consumption of FL aggregation. On the other hand, for user-level privacy protection and transfer learning, we propose a noise-based FML (NbFML) based on a differential-privacy (DP) algorithm and an expression for the sensitivity of the FML aggregation operation is derived. Experiment results show that these algorithms are feasible.
2. An Overview
2.1. FL Algorithm
| Algorithm 1 FL |
Require: Dataset of each participant and the communication rounds T for all nodes.
Ensure: |
2.2. Communication Latency
2.3. SAGSIN Scenario
3. FL-Enabled SAGSIN Applications
3.1. FL-Based Satellite Networks
3.2. FL-Based Aerial Networks
3.3. FL-Based Terrestrial Networks
3.4. FL-Based Sea Networks
4. Challenges in FL-Enabled SAGSINs
4.1. Heterogeneous Data Challenges
4.2. Wireless Communications Challenges at the Physical Layer
4.3. Heterogeneous Challenges at the Network Layer
4.4. Privacy Challenges at the Application Layer
5. Case Study
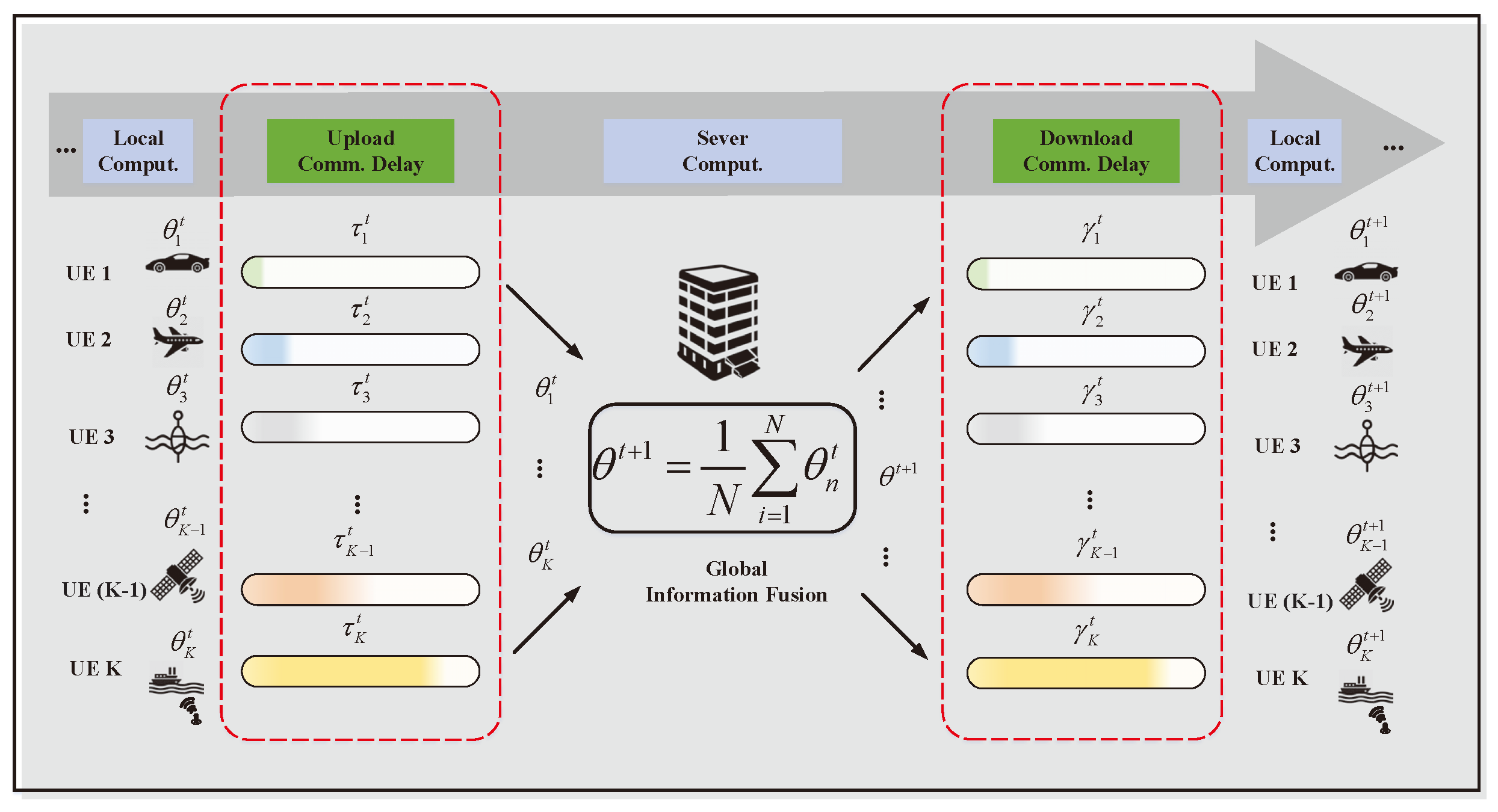
5.1. Delay-Aware FL
5.1.1. Delay-Aware FL
| Algorithm 2 Delay-aware FL |
Require: Dataset at each UE, communication rounds T, scheduling ratio G, parameter w, threshold C, and DP parameters for all nodes.
Ensure: |
5.1.2. Numerical Simulation
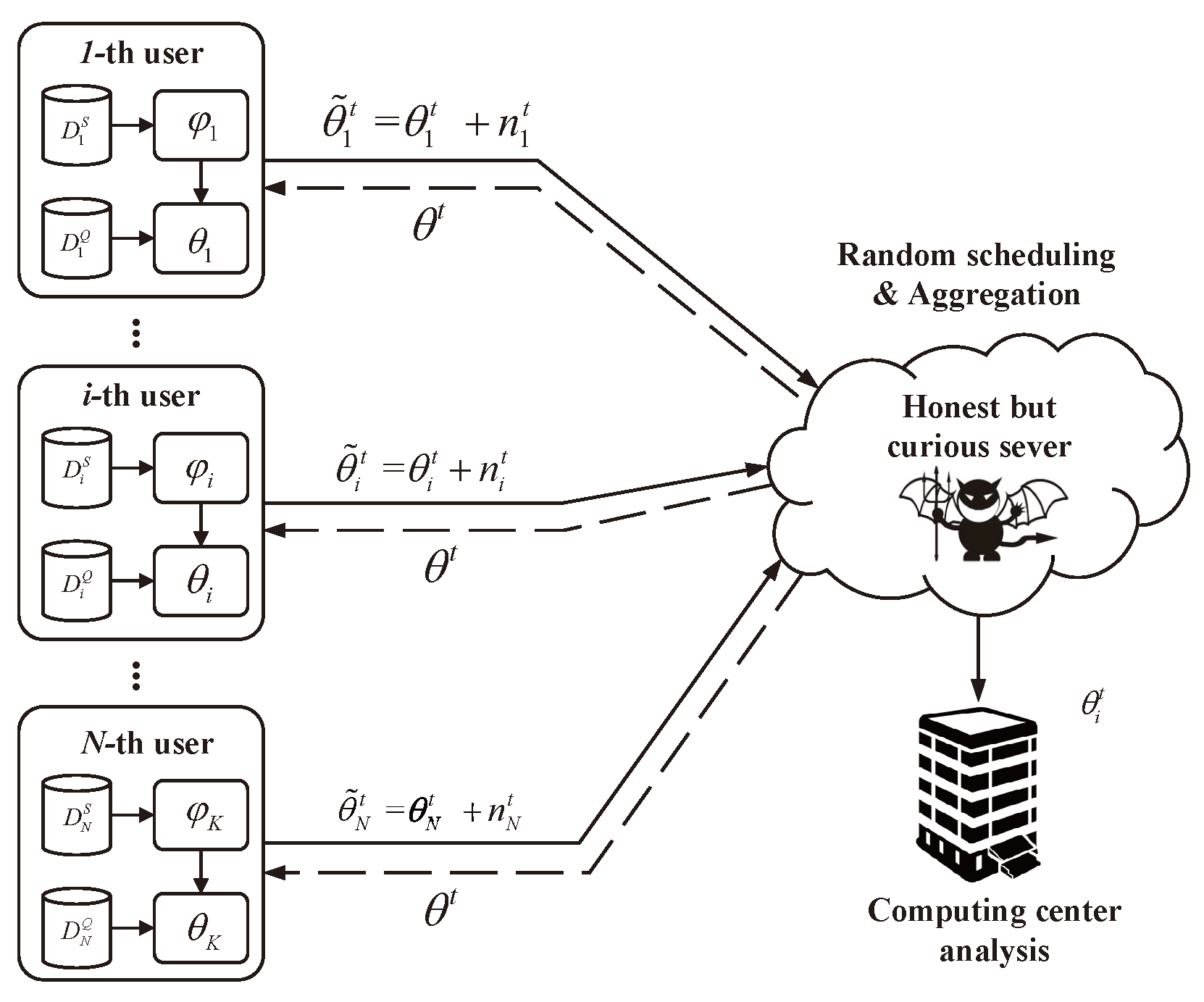
5.2. User-Level Privacy-Preserving-Based FML
5.2.1. Differential Privacy Principle
5.2.2. FML Framework
5.2.3. NbFML Algorithm
| Algorithm 3 NbFML |
Require: Dataset of each user, communication rounds T, parameter , threshold C, and DP parameters for all nodes.
Ensure: |
5.2.4. Numerical Experiment
6. Future Direction
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- O’Shea, T.; Hoydis, J. An Introduction to Deep Learning for the Physical Layer. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 563–575. [Google Scholar] [CrossRef]
- Guo, H.; Li, J.; Liu, J.; Tian, N.; Kato, N. A Survey on Space-Air-Ground-Sea Integrated Network Security in 6G. IEEE Commun. Surv. Tuts. 2022, 24, 53–87. [Google Scholar] [CrossRef]
- Zawish, M.; Dharejo, F.A.; Khowaja, S.A.; Raza, S.; Davy, S.; Dev, K.; Bellavista, P. AI and 6G Into the Metaverse: Fundamentals, Challenges and Future Research Trends. IEEE Open J. Commun. Soc. 2024, 5, 730–778. [Google Scholar] [CrossRef]
- Yang, B.; Liu, S.; Xu, T.; Li, C.; Zhu, Y.; Li, Z.; Zhao, Z. AI-Oriented Two-Phase Multifactor Authentication in SAGINs: Prospects and Challenges. IEEE Consum. Electron. Mag. 2024, 13, 79–90. [Google Scholar] [CrossRef]
- Li, T.; Sahu, A.K.; Talwalkar, A.; Smith, V. Federated Learning: Challenges, Methods, and Future Directions. IEEE Signal Process. Mag. 2020, 37, 50–60. [Google Scholar] [CrossRef]
- Liu, J.; Shi, Y.; Fadlullah, Z.M.; Kato, N. Space-Air-Ground Integrated Network: A Survey. IEEE Commun. Surv. Tuts. 2018, 20, 2714–2741. [Google Scholar] [CrossRef]
- Hong, T.; Lv, M.; Zheng, S.; Hong, H. Key Technologies in 6G SAGS IoT: Shape-Adaptive Antenna and Radar-Communication Integration. IEEE Netw. 2021, 35, 150–157. [Google Scholar] [CrossRef]
- Khan, M.A.; Alzahrani, B.A.; Barnawi, A.; Al-Barakati, A.; Irshad, A.; Chaudhry, S.A. A Resource Friendly Authentication Scheme for Space–air–ground–sea Integrated Maritime Communication Network. Ocean. Eng. 2022, 250, 110894. [Google Scholar] [CrossRef]
- Xu, F.; Yang, F.; Zhao, C.; Wu, S. Deep Reinforcement Learning Based Joint Edge Resource Management in Maritime Network. China Commun. 2020, 17, 211–222. [Google Scholar] [CrossRef]
- Cheng, N.; Quan, W.; Shi, W.; Wu, H.; Ye, Q.; Zhou, H.; Zhuang, W.; Shen, X.; Bai, B. A Comprehensive Simulation Platform for Space-Air-Ground Integrated Network. IEEE Wirel. Commun. 2020, 27, 178–185. [Google Scholar] [CrossRef]
- Bin, L.; Dianhui, Z.; Xiaoming, H.; Feng, W. Field Experiment of Key Technologies Oriented to Space-Air-Ground-Sea Integrated Network. Peng Cheng Lab. Commum. 2020, 1, 24–28. [Google Scholar]
- Kato, N.; Fadlullah, Z.M.; Tang, F.; Mao, B.; Tani, S.; Okamura, A.; Liu, J. Optimizing Space-Air-Ground Integrated Networks by Artificial Intelligence. IEEE Wirel. Commun. 2019, 26, 140–147. [Google Scholar] [CrossRef]
- Niknam, S.; Dhillon, H.S.; Reed, J.H. Federated Learning for Wireless Communications: Motivation, Opportunities, and Challenges. IEEE Commun. Mag. 2020, 58, 46–51. [Google Scholar] [CrossRef]
- Chen, M.; Poor, H.V.; Saad, W.; Cui, S. Wireless Communications for Collaborative Federated Learning. IEEE Commun. Mag. 2020, 58, 48–54. [Google Scholar] [CrossRef]
- Khan, L.U.; Pandey, S.R.; Tran, N.H.; Saad, W.; Han, Z.; Nguyen, M.N.; Hong, C.S. Federated Learning for Edge Networks: Resource Optimization and Incentive Mechanism. IEEE Commun. Mag. 2020, 58, 88–93. [Google Scholar] [CrossRef]
- Savazzi, S.; Nicoli, M.; Bennis, M.; Kianoush, S.; Barbieri, L. Opportunities of Federated Learning in Connected, Cooperative, and Automated Industrial Systems. IEEE Commun. Mag. 2021, 59, 16–21. [Google Scholar] [CrossRef]
- Li, Z.; Sharma, V.; Mohanty, S.P. Preserving Data Privacy via Federated Learning: Challenges and Solutions. IEEE Consum. Electron. Mag. 2020, 9, 8–16. [Google Scholar] [CrossRef]
- Elbir, A.M.; Papazafeiropoulos, A.K.; Chatzinotas, S. Federated Learning for Physical Layer Design. IEEE Commun. Mag. 2021, 59, 81–87. [Google Scholar] [CrossRef]
- Shome, D.; Waqar, O.; Khan, W.U. Federated Learning and Next Generation Wireless Communications: A Survey on Bidirectional Relationship. arXiv 2021, arXiv:2110.07649. [Google Scholar] [CrossRef]
- Elbir, A.M.; Coleri, S. Federated Learning for Channel Estimation in Conventional and RIS-Assisted Massive MIMO. IEEE Trans. Wirel. Commun. 2022, 21, 4255–4268. [Google Scholar] [CrossRef]
- Mashhadi, M.B.; Shlezinger, N.; Eldar, Y.C.; Gündüz, D. Fedrec: Federated Learning of Universal Receivers Over Fading Channels. In Proceedings of the 2021 IEEE Statistical Signal Processing Workshop (SSP), Rio de Janeiro, Brazil, 11–14 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 576–580. [Google Scholar]
- Ji, Z.; Chen, L.; Zhao, N.; Chen, Y.; Wei, G.; Yu, F.R. Computation Offloading for Edge-Assisted Federated Learning. IEEE Trans. Veh. Technol. 2021, 70, 9330–9344. [Google Scholar] [CrossRef]
- Messaoud, S.; Bradai, A.; Ahmed, O.B.; Quang, P.T.A.; Atri, M.; Hossain, M.S. Deep Federated Q-Learning-Based Network Slicing for Industrial IoT. IEEE Trans. Ind. Informat. 2021, 17, 5572–5582. [Google Scholar] [CrossRef]
- Yang, H.H.; Liu, Z.; Quek, T.Q.S.; Poor, H.V. Scheduling Policies for Federated Learning in Wireless Networks. IEEE Trans. Commun. 2020, 68, 317–333. [Google Scholar] [CrossRef]
- Yu, L.; Albelaihi, R.; Sun, X.; Ansari, N.; Devetsikiotis, M. Jointly Optimizing Client Selection and Resource Management in Wireless Federated Learning for Internet of Things. IEEE Internet Things J. 2022, 9, 4385–4395. [Google Scholar] [CrossRef]
- Samarakoon, S.; Bennis, M.; Saad, W.; Debbah, M. Distributed Federated Learning for Ultra-Reliable Low-Latency Vehicular Communications. IEEE Trans. Commun. 2020, 68, 1146–1159. [Google Scholar] [CrossRef]
- Chen, M.; Poor, H.V.; Saad, W.; Cui, S. Convergence Time Optimization for Federated Learning Over Wireless Networks. IEEE Trans. Wirel. Commun. 2020, 20, 2457–2471. [Google Scholar] [CrossRef]
- Yang, J.; Liu, Y.; Chen, F.; Chen, W.; Li, C. Asynchronous Wireless Federated Learning with Probabilistic Client Selection. IEEE Trans. Wireless Commun. 2023; early access. [Google Scholar] [CrossRef]
- Lin, X.; Liu, Y.; Chen, F.; Ge, X.; Huang, X. Joint Gradient Sparsification and Device Scheduling for Federated Learning. IEEE Trans. Green Commun. Netw. 2023, 7, 1407–1419. [Google Scholar] [CrossRef]
- Zhao, Z.; Feng, C.; Yang, H.H.; Luo, X. Federated-Learning-Enabled Intelligent Fog Radio Access Networks: Fundamental Theory, Key Techniques, and Future Trends. IEEE Wirel. Commun. 2020, 27, 22–28. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Ding, M.; Pham, Q.V.; Pathirana, P.N.; Le, L.B.; Seneviratne, A.; Li, J.; Niyato, D.; Poor, H.V. Federated Learning Meets Blockchain in Edge Computing: Opportunities and Challenges. IEEE Internet Things J. 2021, 8, 12806–12825. [Google Scholar] [CrossRef]
- Xiong, Z.; Cai, Z.; Takabi, D.; Li, W. Privacy Threat and Defense for Federated Learning With Non-i.i.d. Data in AIoT. IEEE Trans. Ind. Inform. 2022, 18, 1310–1321. [Google Scholar] [CrossRef]
- Ma, C.; Li, J.; Ding, M.; Yang, H.H.; Shu, F.; Quek, T.Q.; Poor, H.V. On Safeguarding Privacy and Security in the Framework of Federated Learning. IEEE Netw. 2020, 34, 242–248. [Google Scholar] [CrossRef]
- Lin, X.; Liu, Y.; Chen, F.; Huang, Y.; Ge, X. Stochastic gradient compression for federated learning over wireless network. China Commun. 2024, 21, 230–247. [Google Scholar]
- Li, K.; Zhou, H.; Tu, Z.; Wang, W.; Zhang, H. Distributed Network Intrusion Detection System in Satellite-Terrestrial Integrated Networks Using Federated Learning. IEEE Access 2020, 8, 214852–214865. [Google Scholar] [CrossRef]
- Huang, A.; Liu, Y.; Chen, T.; Zhou, Y.; Sun, Q.; Chai, H.; Yang, Q. StarFL: Hybrid Federated Learning Architecture for Smart Urban Computing. ACM Trans. Intell. Syst. Technol. 2021, 12, 1–23. [Google Scholar] [CrossRef]
- Razmi, N.; Matthiesen, B.; Dekorsy, A.; Popovski, P. Ground-Assisted Federated Learning in LEO Satellite Constellations. IEEE Wirel. Commun. Lett. 2022, 11, 717–721. [Google Scholar] [CrossRef]
- Chen, H.; Xiao, M.; Pang, Z. Satellite-Based Computing Networks with Federated Learning. IEEE Wirel. Commun. 2022, 29, 78–84. [Google Scholar] [CrossRef]
- Fadlullah, Z.M.; Kato, N. On Smart IoT Remote Sensing over Integrated Terrestrial-Aerial-Space Networks: An Asynchronous Federated Learning Approach. IEEE Netw. 2021, 35, 129–135. [Google Scholar] [CrossRef]
- Zhang, H.; Hanzo, L. Federated Learning Assisted Multi-UAV Networks. IEEE Trans. Veh. Technol. 2020, 69, 14104–14109. [Google Scholar] [CrossRef]
- Liu, Y.; Nie, J.; Li, X.; Ahmed, S.H.; Lim, W.Y.B.; Miao, C. Federated Learning in the Sky: Aerial-Ground Air Quality Sensing Framework With UAV Swarms. IEEE Internet Things J. 2021, 8, 9827–9837. [Google Scholar] [CrossRef]
- Jing, Y.; Qu, Y.; Dong, C.; Shen, Y.; Wei, Z.; Wang, S. Joint UAV Location and Resource Allocation for Air-Ground Integrated Federated Learning. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Pham, Q.-V.; Zeng, M.; Ruby, R.; Huynh-The, T.; Hwang, W.-J. UAV Communications for Sustainable Federated Learning. IEEE Trans. Veh. Technol. 2021, 70, 3944–3948. [Google Scholar] [CrossRef]
- Xu, C.; Mao, Y. An Improved Traffic Congestion Monitoring System Based on Federated Learning. Information 2020, 11, 365. [Google Scholar] [CrossRef]
- Hua, G.; Zhu, L.; Wu, J.; Shen, C.; Zhou, L.; Lin, Q. Blockchain-Based Federated Learning for Intelligent Control in Heavy Haul Railway. IEEE Access 2020, 8, 176830–176839. [Google Scholar] [CrossRef]
- Wang, X.; Han, Y.; Wang, C.; Zhao, Q.; Chen, X.; Chen, M. In-Edge AI: Intelligentizing Mobile Edge Computing, Caching and Communication by Federated Learning. IEEE Netw. 2019, 33, 156–165. [Google Scholar] [CrossRef]
- Savazzi, S.; Nicoli, M.; Rampa, V. Federated Learning With Cooperating Devices: A Consensus Approach for Massive IoT Networks. IEEE Internet Things J. 2020, 7, 4641–4654. [Google Scholar] [CrossRef]
- Lu, Y.; Huang, X.; Dai, Y.; Maharjan, S.; Zhang, Y. Blockchain and Federated Learning for Privacy-Preserved Data Sharing in Industrial IoT. IEEE Trans. Ind. Informat. 2020, 16, 4177–4186. [Google Scholar] [CrossRef]
- Qin, Z.; Ye, J.; Meng, J.; Lu, B.; Wang, L. Privacy-Preserving Blockchain-Based Federated Learning for Marine Internet of Things. IEEE Trans. Comput. Soc. Syst. 2022, 9, 159–173. [Google Scholar] [CrossRef]
- Zhang, Z.; Guan, C.; Chen, H.; Yang, X.; Gong, W.; Yang, A. Adaptive Privacy Preserving Federated Learning for Fault Diagnosis in Internet of Ships. IEEE Internet Things J. 2022, 9, 6844–6854. [Google Scholar] [CrossRef]
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.L.P. Underwater Internet of Things in Smart Ocean: System Architecture and Open Issues. IEEE Trans. Ind. Inform. 2020, 16, 4297–4307. [Google Scholar] [CrossRef]
- Kwon, D.; Jeon, J.; Park, S.; Kim, J.; Cho, S. Multiagent DDPG-Based Deep Learning for Smart Ocean Federated Learning IoT Networks. IEEE Internet Things J. 2020, 7, 9895–9903. [Google Scholar] [CrossRef]
- Zhao, H.; Ji, F.; Li, Q.; Guan, Q.; Wang, S.; Wen, M. Federated Meta-Learning Enhanced Acoustic Radio Cooperative Framework for Ocean of Things. IEEE J. Sel. Top. Signal Process. 2022, 16, 474–486. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Fang, Z.; Zhang, X.; Song, S.; Zhang, X.; Ren, Y. Machine-Learning-Aided Mission-Critical Internet of Underwater Things. IEEE Netw. 2021, 35, 160–166. [Google Scholar] [CrossRef]
- Lin, S.; Yang, G.; Zhang, J. Real-time edge intelligence in the making: A Collaborative learning framework via federated meta-learning. arXiv 2020, arXiv:2001.03229. [Google Scholar]
- Yue, S.; Ren, J.; Xin, J.; Lin, S.; Zhang, J. Inexact-ADMM Based Federated Meta-Learning for Fast and Continual Edge Learning. In Proceedings of the Twenty-second International Symposium on Theory, Algorithmic Foundations, and Protocol Design for Mobile Networks and Mobile Computing, Shanghai, China, 26–29 July 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 91–100. [Google Scholar]
- Lin, S.; Yang, L.; He, Z.; Fan, D.; Zhang, J. MetaGater: Fast Learning of Conditional Channel Gated Networks via Federated Meta-Learning. In Proceedings of the 2021 IEEE 18th International Conference on Mobile Ad Hoc and Smart Systems (MASS), Denver, CO, USA, 4–7 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 164–172. [Google Scholar]
- Yue, S.; Ren, J.; Xin, J.; Zhang, D.; Zhang, Y.; Zhuang, W. Efficient Federated Meta-Learning Over Multi-Access Wireless Networks. IEEE J. Sel. Areas Commun. 2022, 40, 1556–1570. [Google Scholar] [CrossRef]
- Abadi, M.; Chu, A.; Goodfellow, I.; McMahan, H.B.; Mironov, I.; Talwar, K.; Zhang, L. Deep Learning with Differential Privacy. In Proceedings of the 2016 ACM SIGSAC Conference on Computer and Communications Security, Vienna, Austria, 24–28 October 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 308–318. [Google Scholar]
- Wang, N.; Xiao, X.K.; Yang, Y.; Zhao, J.; Hui, S.C.; Shin, H.; Shin, J.; Yu, G. Collecting and Analyzing Multidimensional Data with Local Differential Privacy. In Proceedings of the 2019 IEEE 35th International Conference on Data Engineering (ICDE), Macao, China, 8–11 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 638–649. [Google Scholar]
- Wang, S.; Huang, L.S.; Nie, Y.W.; Zhang, X.Y.; Wang, P.Z.; Xu, H.L.; Yang, W. Local differential private data aggregation for discrete distribution estimation. IEEE Trans. Parallel Distrib. Syst. 2019, 30, 2046–2059. [Google Scholar] [CrossRef]
- Finn, C.; Abbeel, P.; Levine, S. Model-agnostic Meta-learning for Fast Adaptation of Deep Networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 1126–1135. [Google Scholar]
- Ganin, Y.; Lempitsky, V. Unsupervised Domain Adaptation by Backpropagation. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 1180–1189. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Comm. Distance | Propagation Speed | Comm. Delay |
|---|---|---|---|
| GEO | ∼35,000 km | 3 | ∼ 0.117 |
| MEO | ∼8000 km | Idem | ∼27 |
| LEO | ∼800 km | Idem | ∼3 |
| HAP | ∼20 km | Idem | ∼66.6 |
| Airplane | ∼10 km | Idem | ∼33.3 |
| eVTOL | ∼1 km | Idem | ∼3.33 |
| UAV | ∼150 m | Idem | ∼ 0.5 |
| Vehicle | ∼100 m | Idem | ∼ 0.33 |
| Buoy | ∼500 m | Idem | ∼ 1.65 |
| Shallow water | ∼50 m | 1.5 | ∼30 |
| Deep water | ∼1500 m | Idem | ∼1 |
| Deep ocean | ∼5000 m | Idem | ∼3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Ji, F.; Wang, Y.; Yao, K.; Chen, F. Space–Air–Ground–Sea Integrated Network with Federated Learning. Remote Sens. 2024, 16, 1640. https://doi.org/10.3390/rs16091640
Zhao H, Ji F, Wang Y, Yao K, Chen F. Space–Air–Ground–Sea Integrated Network with Federated Learning. Remote Sensing. 2024; 16(9):1640. https://doi.org/10.3390/rs16091640
Chicago/Turabian StyleZhao, Hao, Fei Ji, Yan Wang, Kexing Yao, and Fangjiong Chen. 2024. "Space–Air–Ground–Sea Integrated Network with Federated Learning" Remote Sensing 16, no. 9: 1640. https://doi.org/10.3390/rs16091640
APA StyleZhao, H., Ji, F., Wang, Y., Yao, K., & Chen, F. (2024). Space–Air–Ground–Sea Integrated Network with Federated Learning. Remote Sensing, 16(9), 1640. https://doi.org/10.3390/rs16091640