The following paragraphs are related to the test and validation of the proposed solution: In
Section 3.1, an assessment of the tilting compensated GNSS receiver has been performed by conducting a comparison with the Leica AP20 AutoPole, a new instrument by Hexagon Leica composed of a 360 Leica prism mounted on top of a 2.40 m (max) telescopic pole. The system provides a device that communicates the height of the pole to the TS. Moreover, it streams the tilt angle and direction to the TS for real-time compensation of the acquired topographic measures, which are performed by the automatic recognition, locking, and tracking of the 360 prisms.
Section 3.2 discusses the accuracy of the GS18 mounted on the self-built pole by comparing a set of nine GCPs measured with both GNSS N-RTK tilt compensation antenna and TS. Another analysis is related to the stability of the conical markers over time, as they were measured again the day after to look for their stability, i.e., change of position on the seabed related to a strong current or other factors.
3.1. Assessment of the Tilting Compensation of the Leica GS18 and Comparison with the Leica AP20 AutoPole
This experiment analyzed the possible differences between a TS (Total Station) side shot acquisition (generally more accurate) and an N-RTK GNSS survey. According to the usual conditions in a water environment and the related problems in obtaining the verticality of a pole, tilt compensation is necessary to reduce the errors in the GCPs measurements. To find the more accurate system for measuring points in underwater environments, a comparison between the tilting systems embedded in the GNSS and in the Leica AutoPole was conducted. The test was conducted in a dry environment, measuring three known vertexes with the above devices using the approach reported below.
In detail, the experimental investigation delineated in this passage has been executed to juxtapose the precision achievable through the utilization of the Leica GS18 against that of the Leica AP20 AutoPole.
The genesis of the AP20 AutoPole can be traced back to the breakthroughs facilitated by the GS18 T smart antenna. This pioneering antenna surmounted the traditional limitations of GNSS poles, heralding a novel era of technological advancement conducive to seamless integration within the total station ecosystem. By amalgamating this innovative capacity with additional functionalities aimed at autonomously detecting fluctuations in pole height and obviating the need for manual calibration, the AP20 was conceptualized as a holistic solution to contemporary surveying challenges [
20].
The AP20 AutoPole, as depicted in
Figure 13, represents a paradigm shift in surveying instrumentation engineered by Hexagon Leica. Comprising a 360-degree Leica prism atop a telescopic pole capable of extending up to 2.40 m, this system embodies a sophisticated apparatus designed to communicate precise positional data to the TS. Furthermore, it facilitates real-time data transmission regarding the pole’s tilt angle and orientation, thereby enabling dynamic compensation of acquired topographic measurements. This is achieved through the automated recognition, fixation, and continual tracking of the 360-degree prism, ensuring unparalleled accuracy and efficiency in surveying endeavors.
The entirety of the measurement framework operates on the foundation of dependable sensor inputs, circumventing the reliance on manual leveling constraints. Embedded within the AP20 is Inertial Measurement Unit (IMU) technology, which serves to ascertain the three-dimensional alignment of the pole within its spatial context. Analogous to the sophisticated design of the Leica GS18 T [
18], the IMU employed within the AP20 is predicated upon industrial-grade Microelectromechanical Systems (MEMSs), housing a triad of sensors, a three-axis accelerometer and a three-axis gyroscope, meticulously calibrated to capture acceleration and angular velocity with utmost precision.
In conjunction with the total station’s continuous tracking of target positions, these sensor readings are seamlessly integrated into a bespoke Inertial Navigation System (INS) meticulously integrated within the AP20 apparatus. The INS algorithm, employing rigorous mathematical computations, orchestrates the transformation and fusion of IMU-derived measurements into the total station’s coordinate system, thereby discerning the spatial orientation of the pole and its attendant quality metrics with unparalleled accuracy [
20].
The test has been carried out by following the steps below:
Identifying a set of points (A, B, and C) of known coordinates.
Each point is measured a dozen times with the following:
The test aimed to assess the standard deviations and coordinate residuals for each point (A, B, and C) across three distinct instrument settings and configurations, replicating operational scenarios typical of underwater (UW) surveying.
Table 4.
Standard deviations of the measurements of point A coordinates, with AP20 and GS18 (single epoch and 10 s acquisition) in steady and tilting configurations (max five gons and max ten gons).
Table 4.
Standard deviations of the measurements of point A coordinates, with AP20 and GS18 (single epoch and 10 s acquisition) in steady and tilting configurations (max five gons and max ten gons).
| Test Type |
Instrument
|
σx [m]
|
σy [m]
|
σz [m]
|
|---|
| Steady | AP20 | 0.002 | 0.003 | 0.002 |
| GS18 | 0.007 | 0.011 | 0.020 |
| GS18 (10 s) | 0.005 | 0.015 | 0.020 |
| Tilt max five gons | AP20 | 0.002 | 0.001 | 0.000 |
| GS18 | 0.004 | 0.003 | 0.008 |
| GS18 (10 s) | 0.005 | 0.005 | 0.007 |
| Tilt max ten gons | AP20 | 0.003 | 0.005 | 0.001 |
| GS18 | 0.004 | 0.005 | 0.013 |
| GS18 (10 s) | 0.007 | 0.008 | 0.010 |
Figure 14.
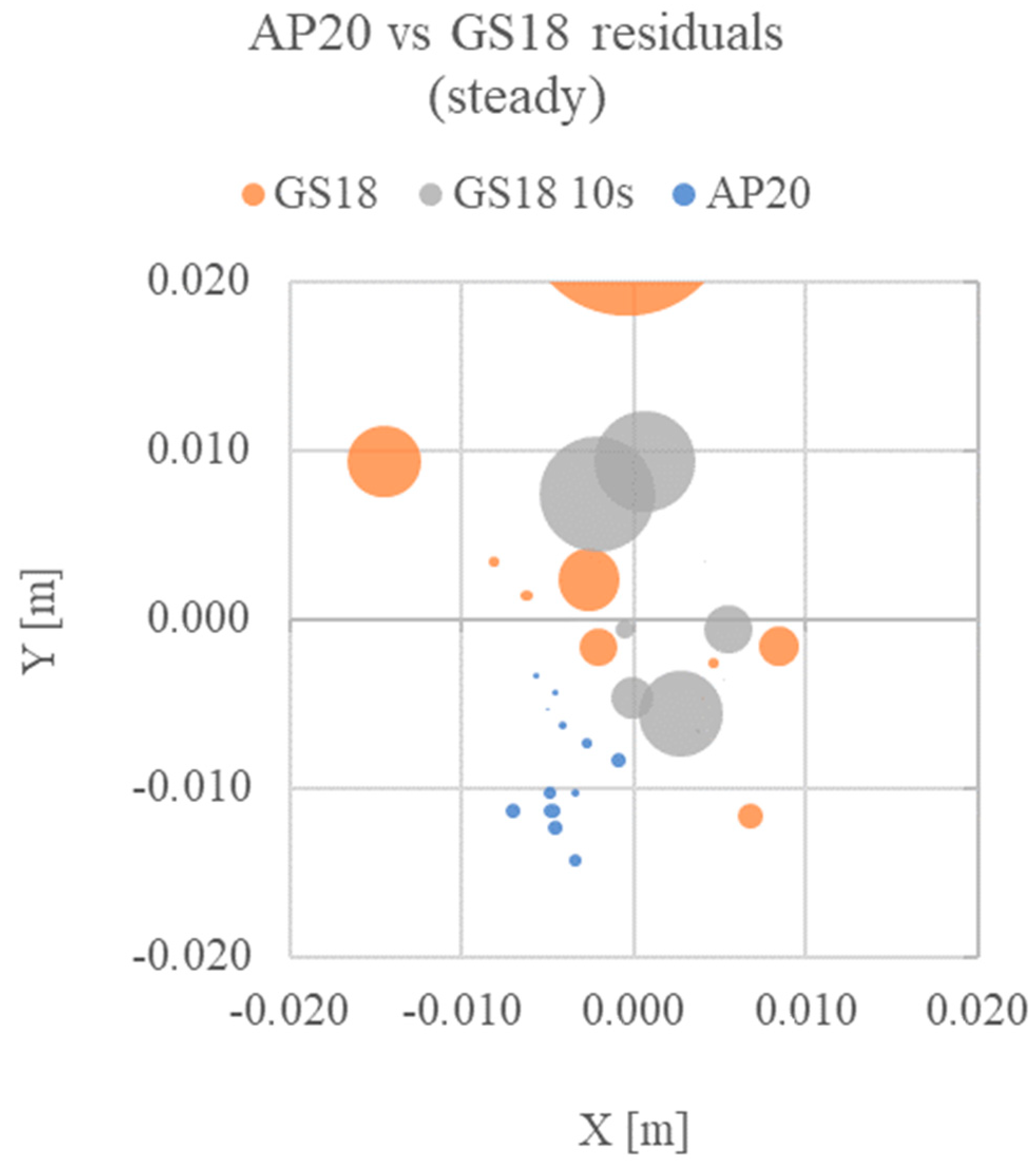
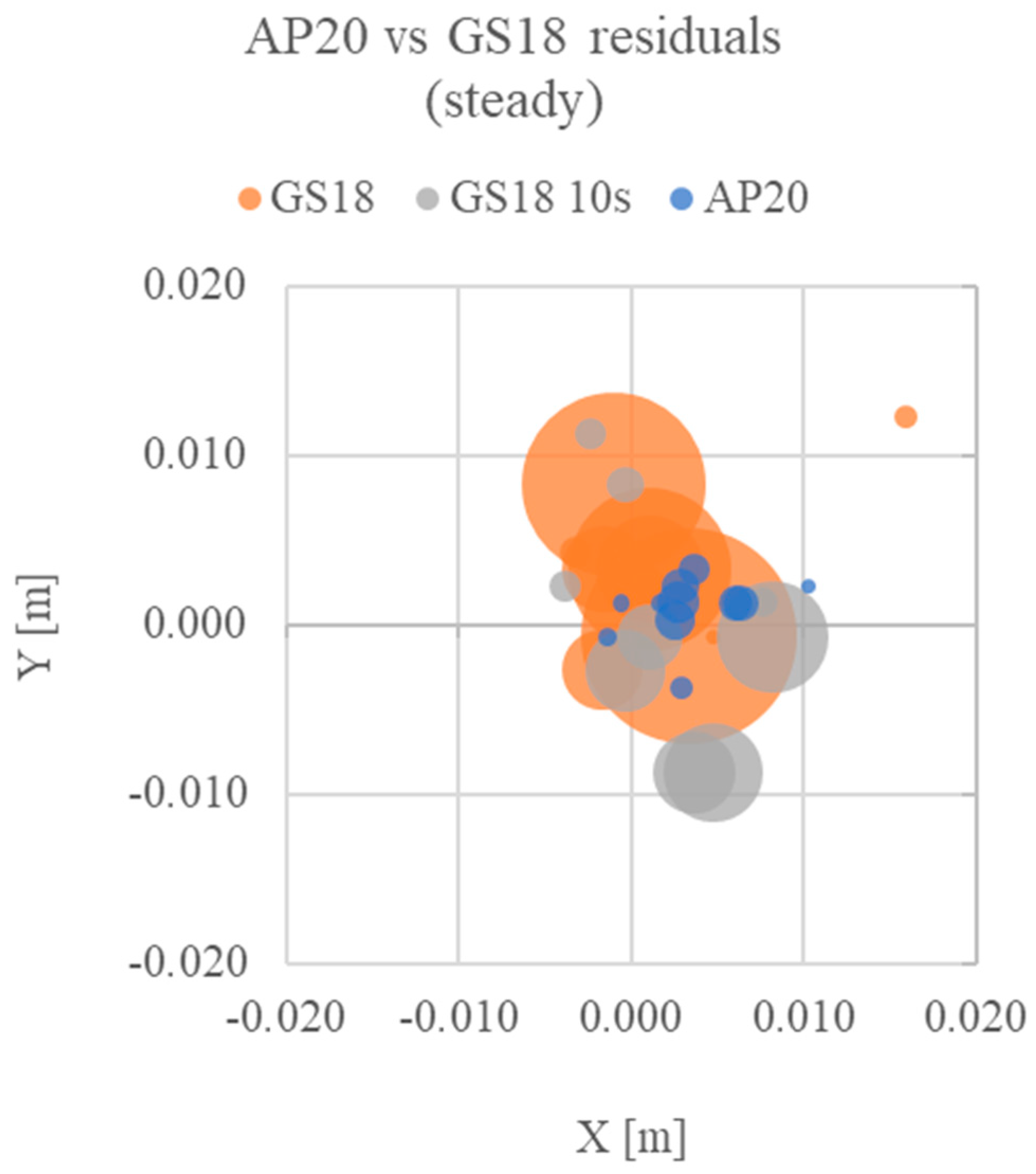
Relative coordinates plot for point A (0;0) for the test in steady configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 14.
Relative coordinates plot for point A (0;0) for the test in steady configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 15.
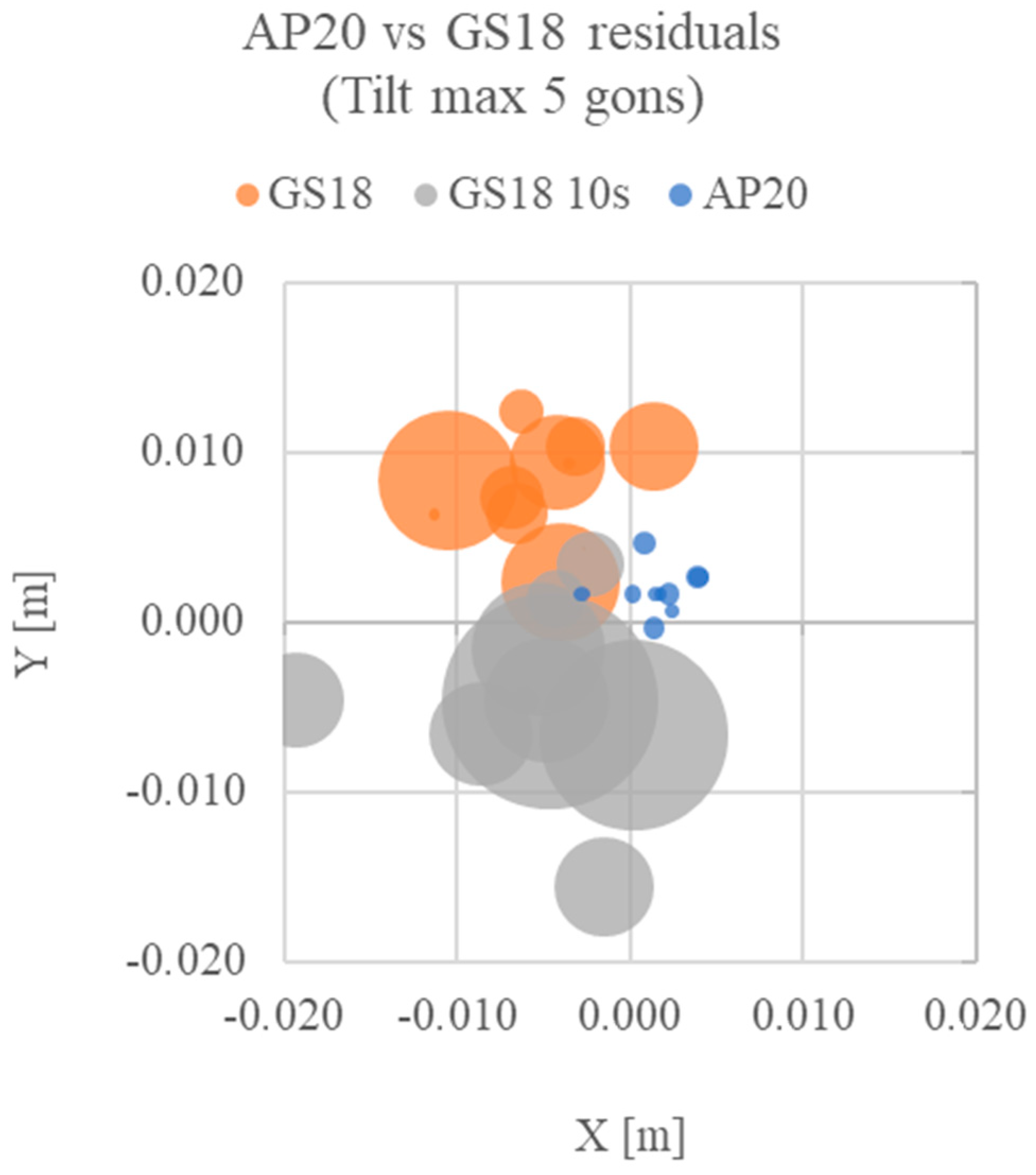
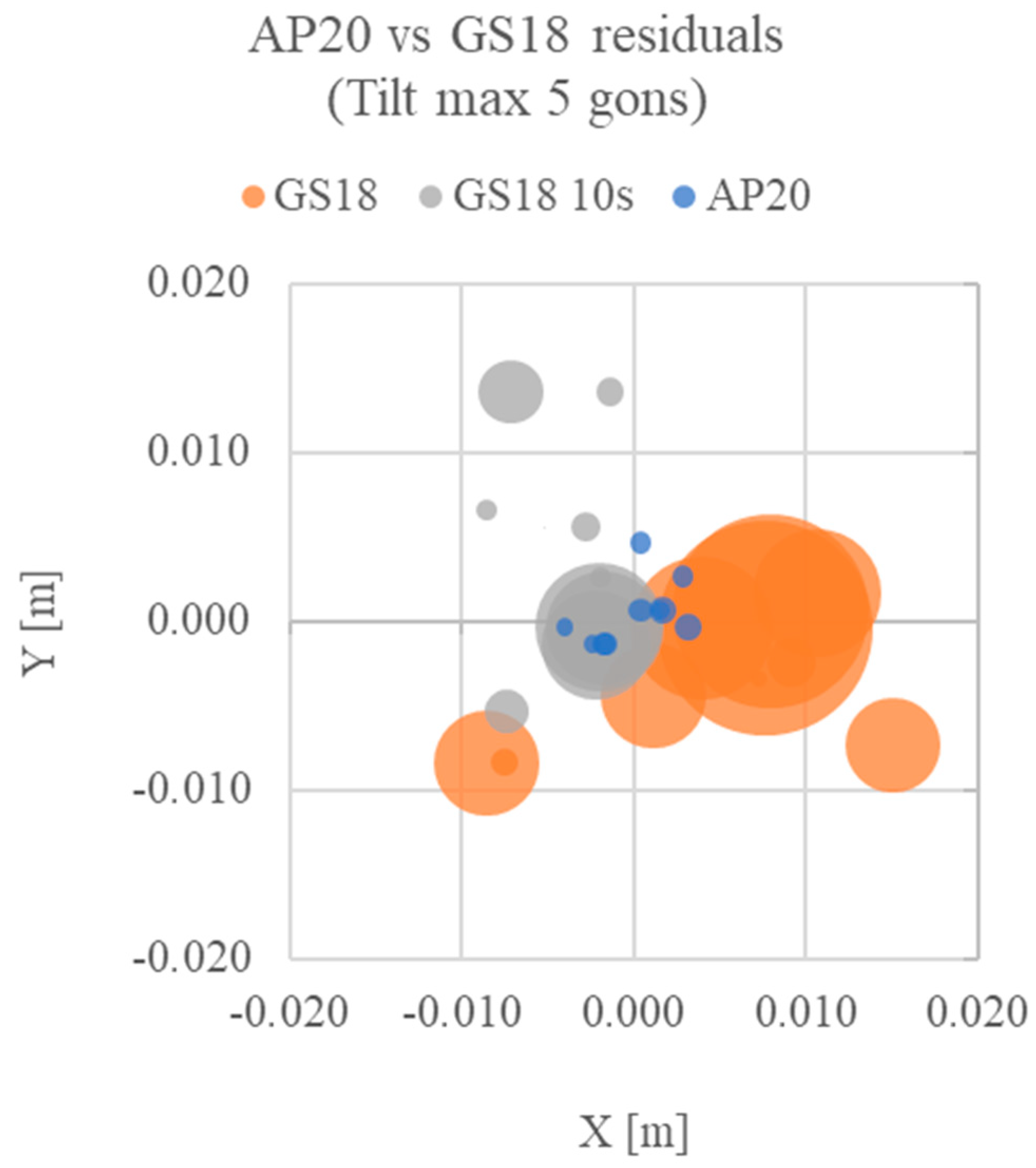
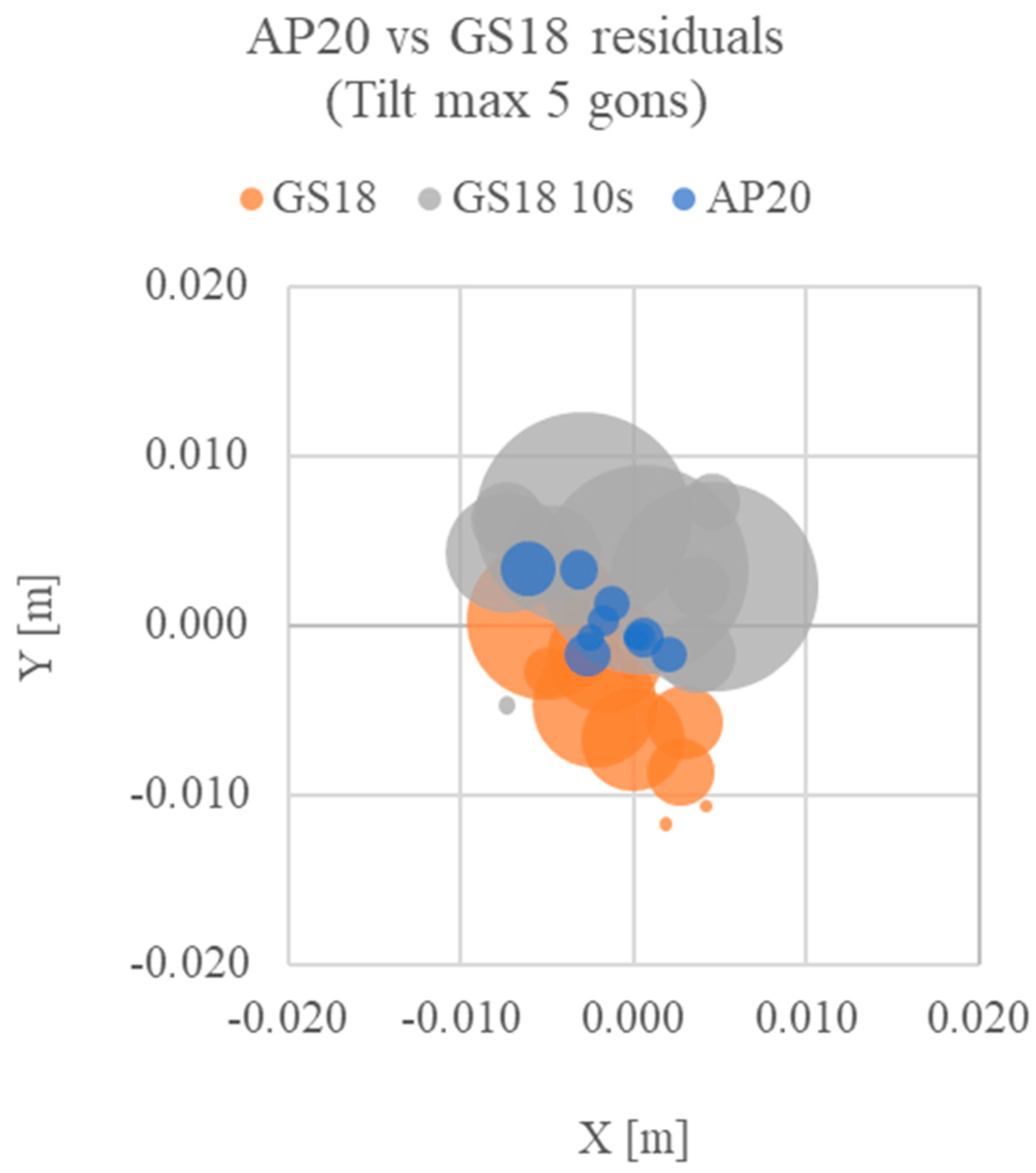
Relative coordinates plot for point A (0;0) for the test in tilting (max five gons) configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 15.
Relative coordinates plot for point A (0;0) for the test in tilting (max five gons) configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
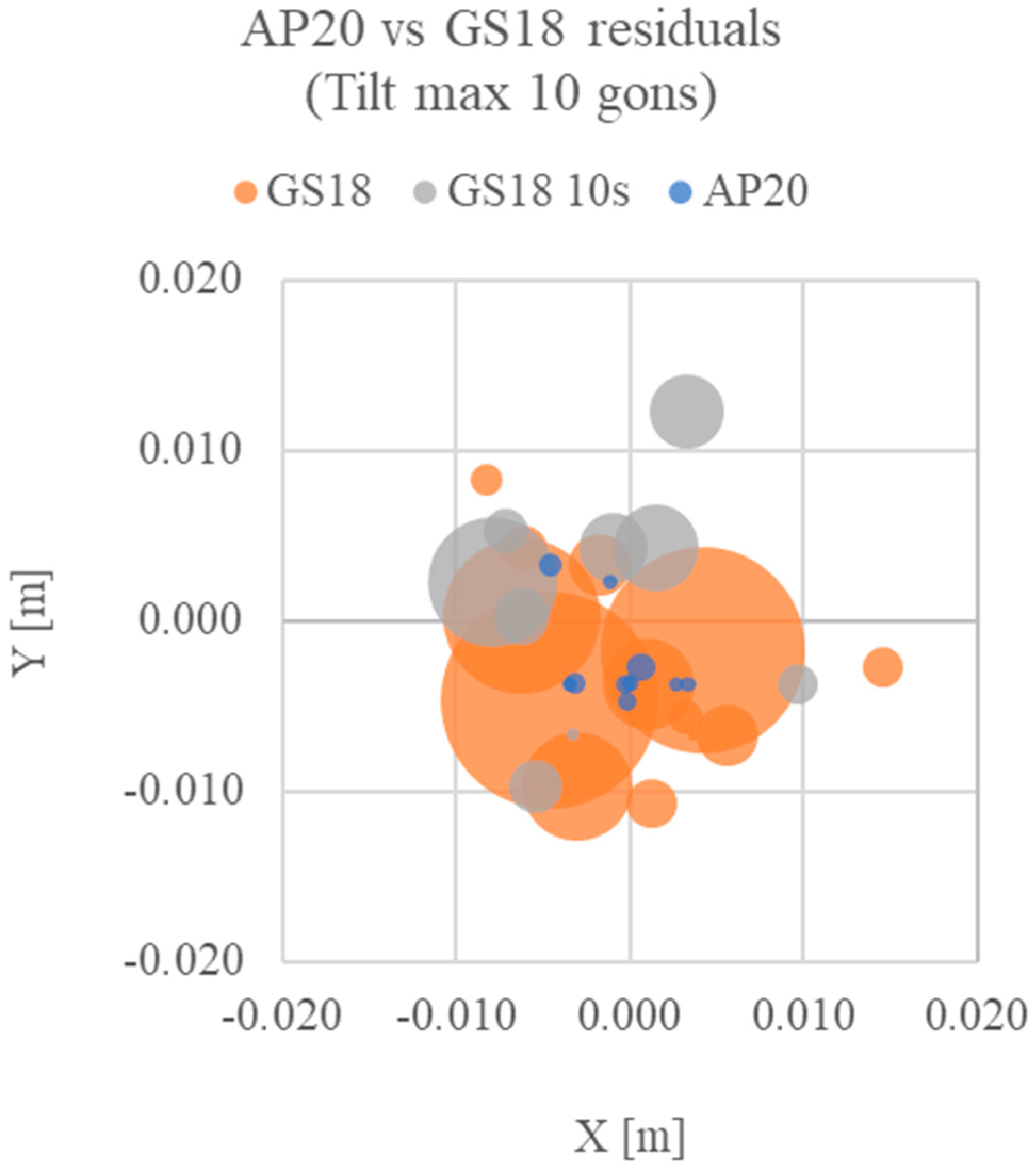
Figure 16.
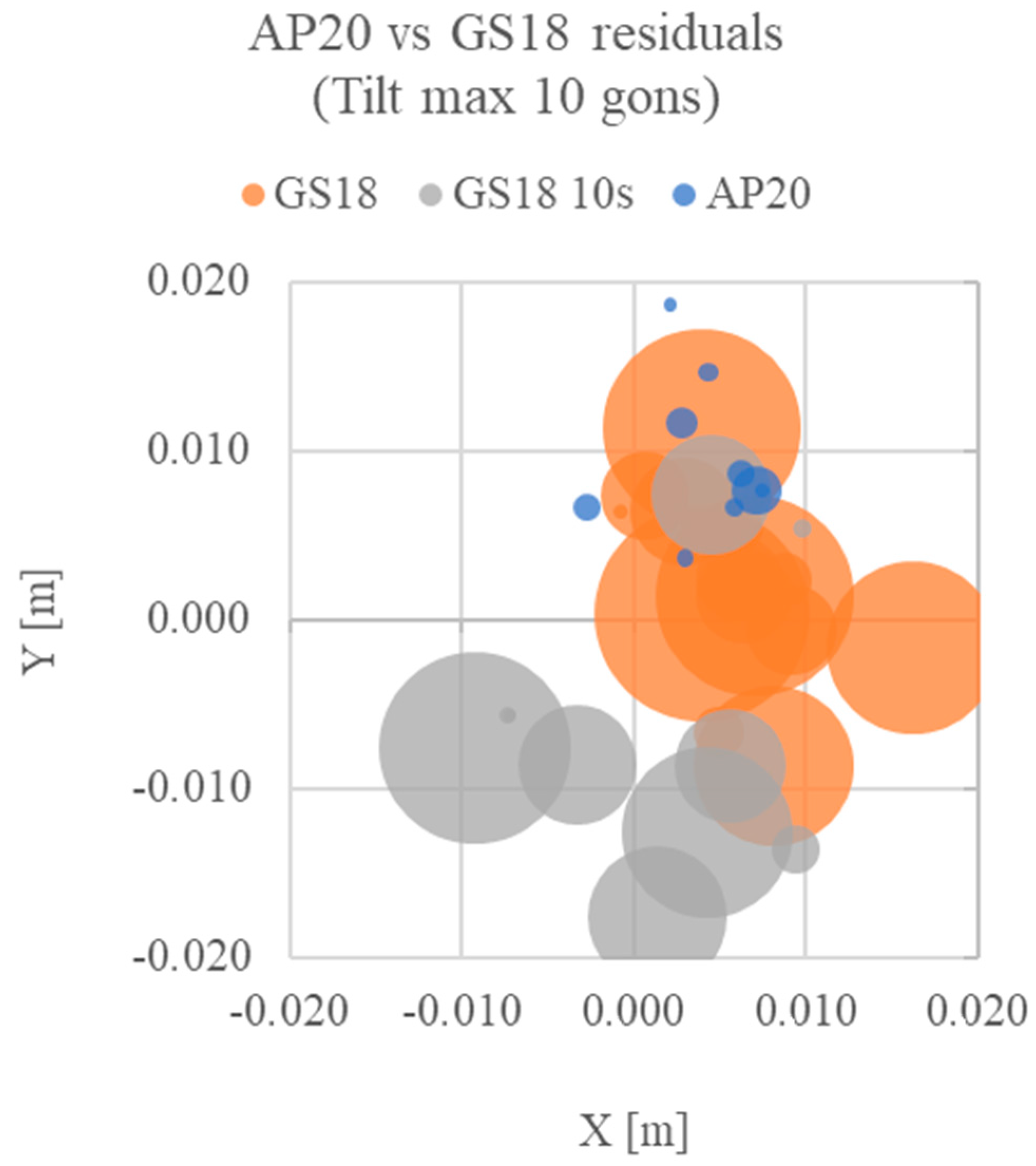
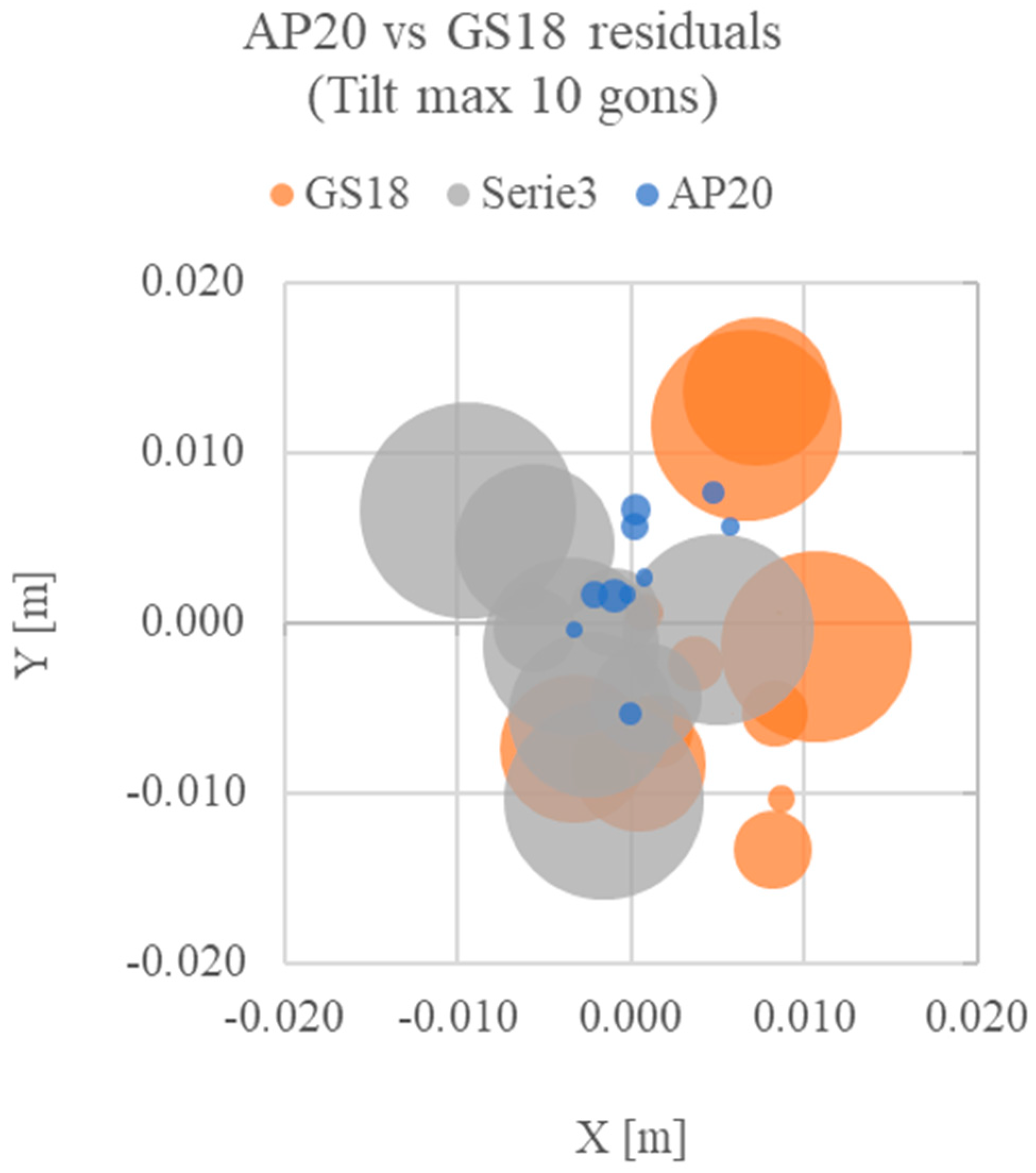
Relative coordinates plot for point A (0;0) for the tilting (max ten gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 16.
Relative coordinates plot for point A (0;0) for the tilting (max ten gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Table 5.
Standard deviations of the measurements of point B coordinates, with AP20 and GS18 (single epoch and 10 s acquisition) in steady and tilting configurations (max five gons and max ten gons).
Table 5.
Standard deviations of the measurements of point B coordinates, with AP20 and GS18 (single epoch and 10 s acquisition) in steady and tilting configurations (max five gons and max ten gons).
| Test Type |
Instrument
|
σx [m]
|
σy [m]
|
σz [m]
|
|---|
| Steady | AP20 | 0.003 | 0.004 | 0.001 |
| GS18 | 0.003 | 0.004 | 0.006 |
| GS18 (10 s) | 0.005 | 0.006 | 0.005 |
| Tilt max five gons | AP20 | 0.003 | 0.004 | 0.001 |
| GS18 | 0.007 | 0.004 | 0.008 |
| GS18 (10 s) | 0.003 | 0.006 | 0.005 |
| Tilt max ten gons | AP20 | 0.002 | 0.002 | 0.000 |
| GS18 | 0.004 | 0.008 | 0.005 |
| GS18 (10 s) | 0.004 | 0.005 | 0.005 |
Figure 17.
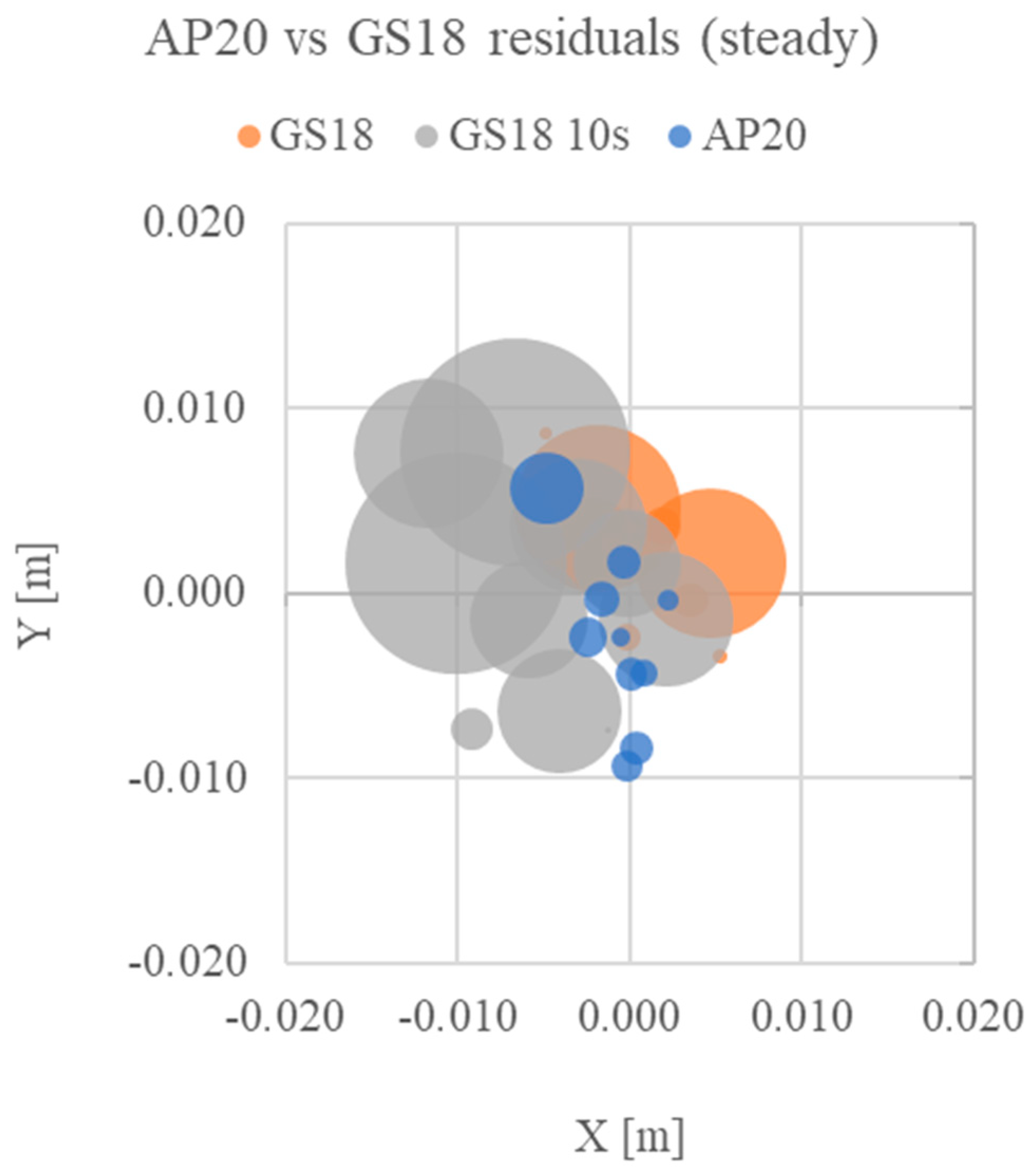
Relative coordinates plot for point B (0;0) for the test in steady configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 17.
Relative coordinates plot for point B (0;0) for the test in steady configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 18.
Relative coordinates plot for point B (0;0) for the tilting (max five gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 18.
Relative coordinates plot for point B (0;0) for the tilting (max five gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 19.
Relative coordinates plot for point B (0;0) for the tilting (max ten gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 19.
Relative coordinates plot for point B (0;0) for the tilting (max ten gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Table 6.
Standard deviations of the measurements of point C coordinates, with AP20 and GS18 (single epoch and 10 s acquisition) in steady and tilting configurations (max five gons and max ten gons).
Table 6.
Standard deviations of the measurements of point C coordinates, with AP20 and GS18 (single epoch and 10 s acquisition) in steady and tilting configurations (max five gons and max ten gons).
| Test Type |
Instrument
|
σx [m]
|
σy [m]
|
σz [m]
|
|---|
| Steady | AP20 | 0.004 | 0.002 | 0.001 |
| GS18 | 0.005 | 0.004 | 0.007 |
| GS18 (10 s) | 0.004 | 0.007 | 0.005 |
| Tilt max five gons | AP20 | 0.004 | 0.002 | 0.001 |
| GS18 | 0.004 | 0.005 | 0.005 |
| GS18 (10 s) | 0.005 | 0.004 | 0.006 |
| Tilt max ten gons | AP20 | 0.002 | 0.003 | 0.001 |
| GS18 | 0.006 | 0.006 | 0.010 |
| GS18 (10 s) | 0.005 | 0.006 | 0.006 |
Figure 20.
Relative coordinates plot for point C (0;0) for the test in steady configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 20.
Relative coordinates plot for point C (0;0) for the test in steady configuration. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 21.
Relative coordinates plot for point C (0;0) for the tilting (max five gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 21.
Relative coordinates plot for point C (0;0) for the tilting (max five gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 22.
Relative coordinates plot for point C (0;0) for the tilting (max ten gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Figure 22.
Relative coordinates plot for point C (0;0) for the tilting (max ten gons) configuration test. X and Y are the planimetric residuals, while the point’s radius indicates the altimetric residual for each set of measures.
Upon analysis, it is evident that for AP20 measurements, consistency is maintained across all three points and configurations, with results exhibiting comparable standard deviations and coordinate residuals.
In contrast, when examining GS18 measurements, the steady configuration’s superiority becomes apparent in measurement accuracy. This configuration yields lower standard deviations and residuals, indicating heightened accuracy and reduced dispersion. However, the 10 s acquisition setting notably enhances accuracy solely in the z component.
Overall, the acquired results are highly promising, surpassing both conventional techniques and analog land surveying methodologies in terms of precision and reliability.
3.2. Accuracy Comparison with Total Station and Stability of the Markers over Time
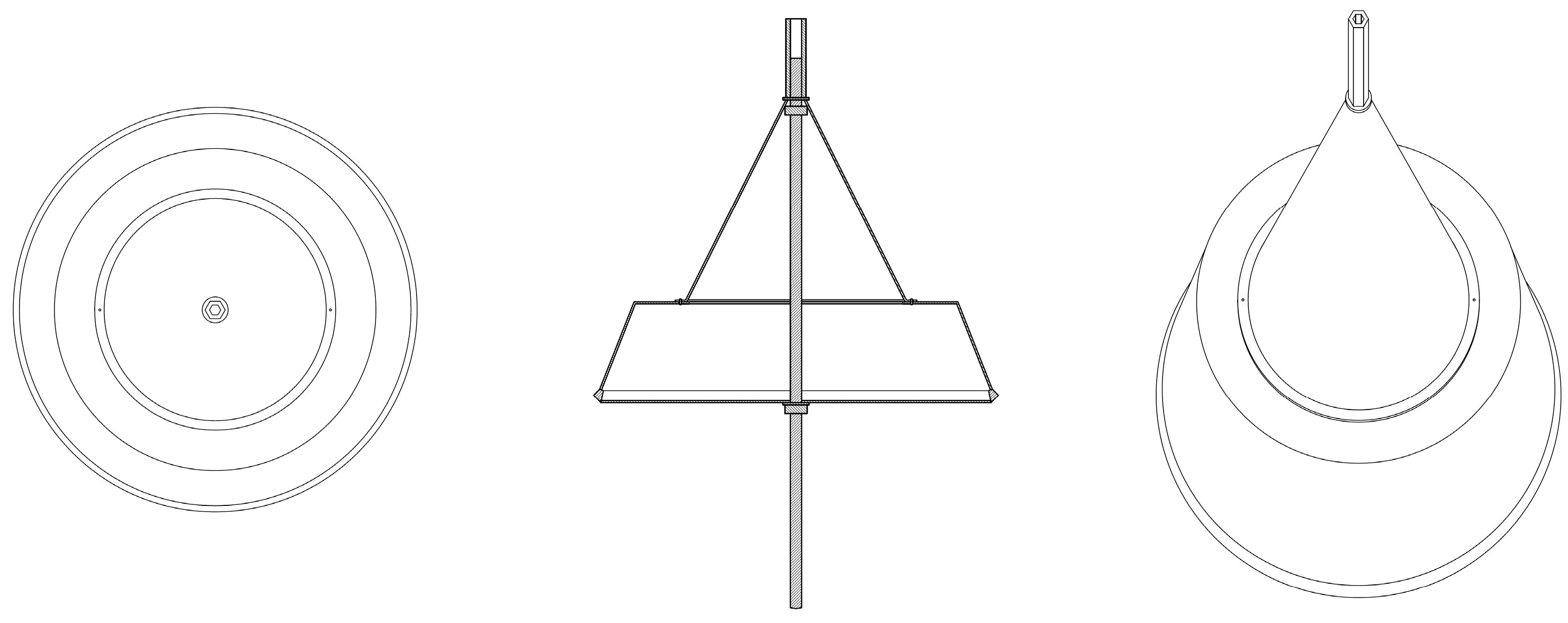
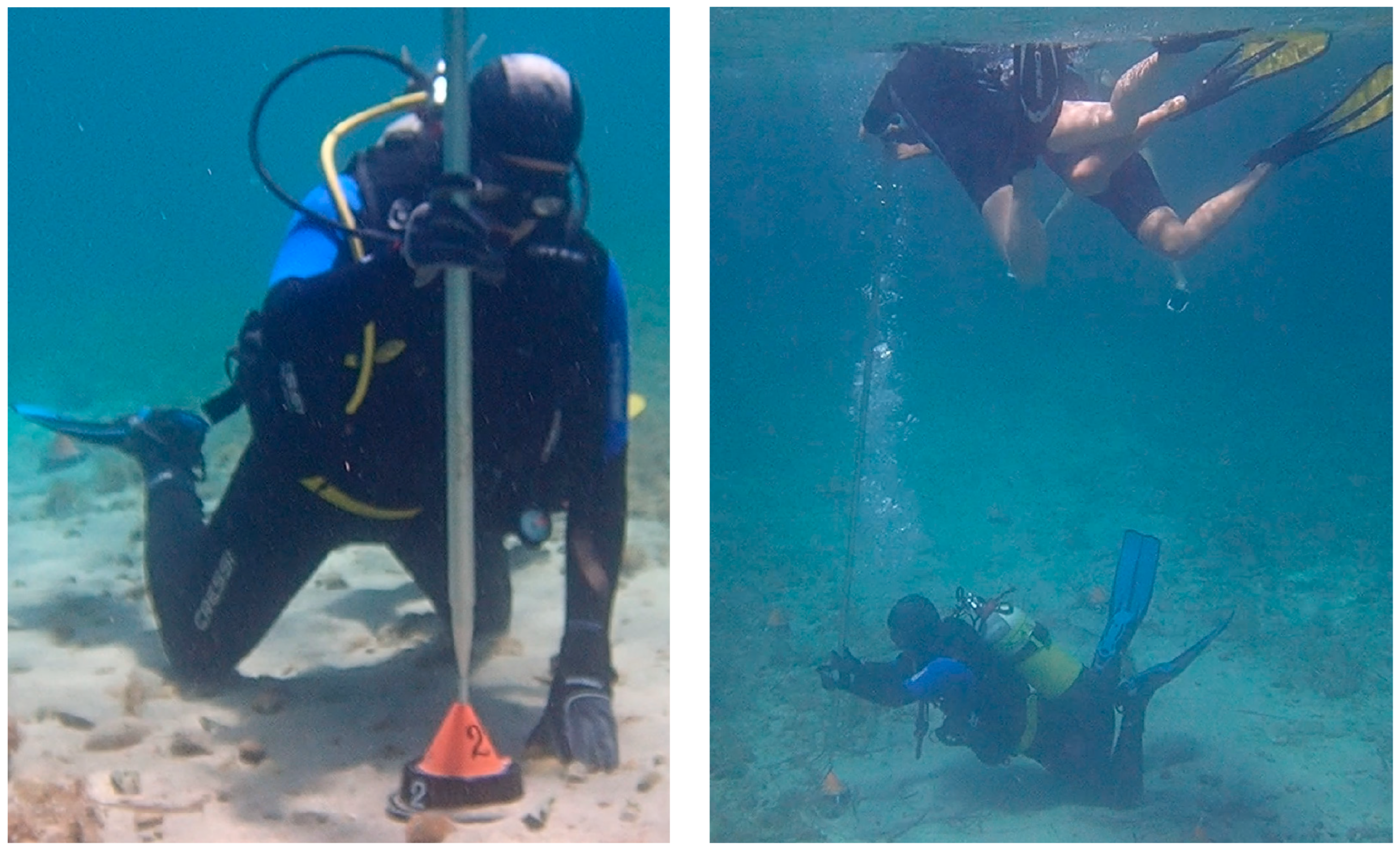
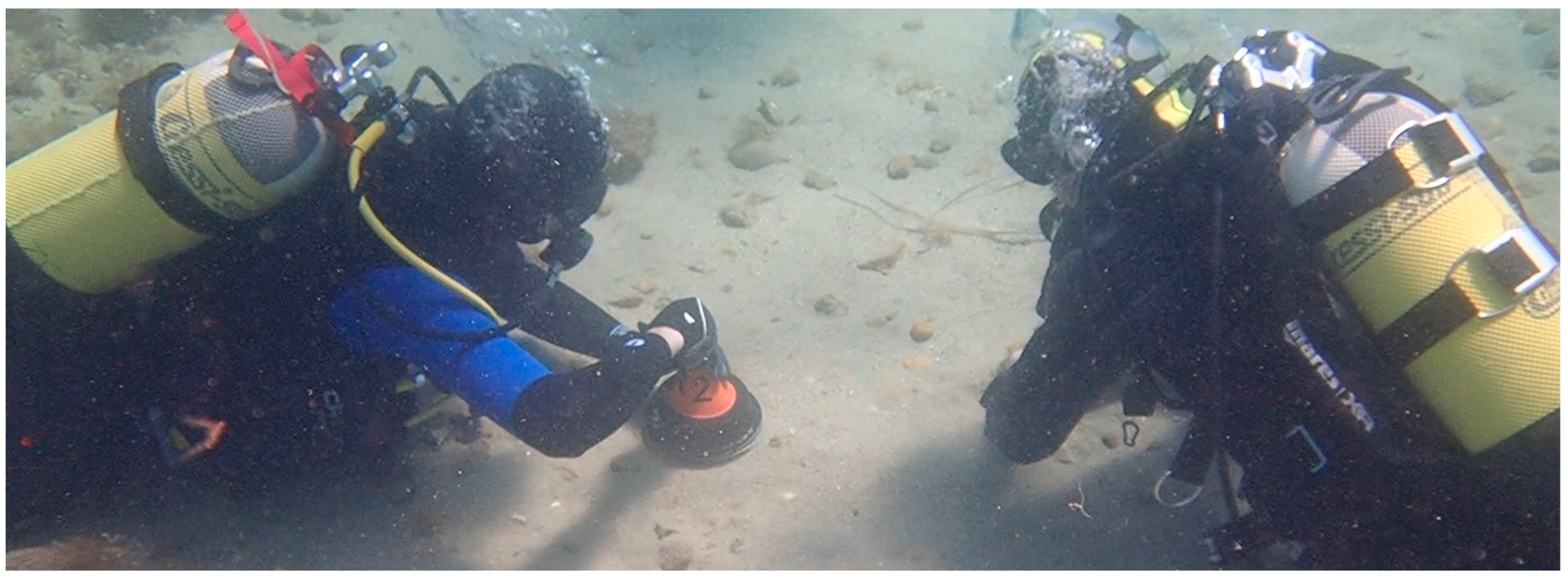
The analyses carried out are related to the stability of conical markers over time; the purpose of the validation is to measure the coordinates of the markers after their positioning on the seabed and in the following 24 h to analyze (if any) even minimal displacements related to bottom currents or other factors such as, for example, disturbance due to local flora and fauna or other external factors (boats or swimmers not foreseen in the survey operations). The test described was conducted in 2022 in Coluccia, north of Sardinia. In this context, the CONETTO system was tested for the first time in the relevant environment.
The procedure consisted of the following steps:
A set of nine conical markers is placed within the survey area
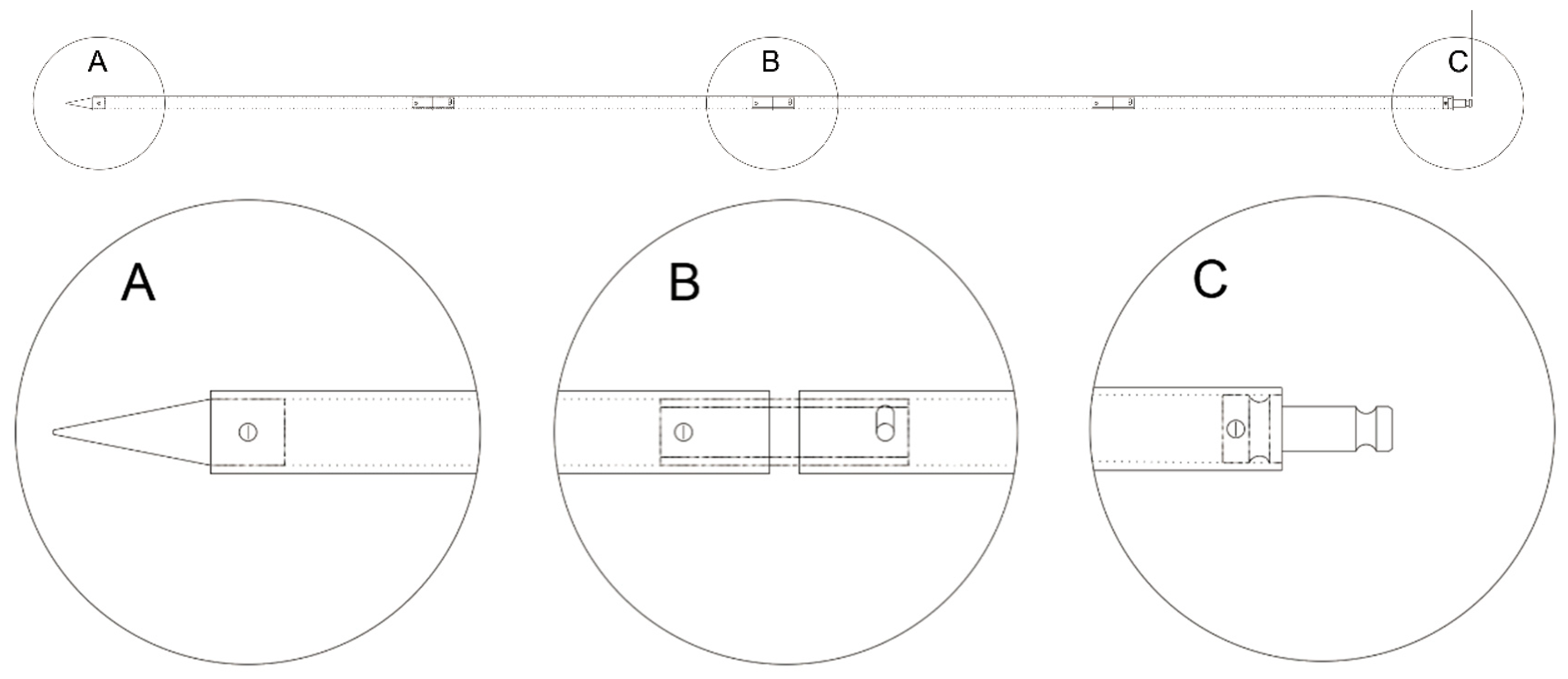
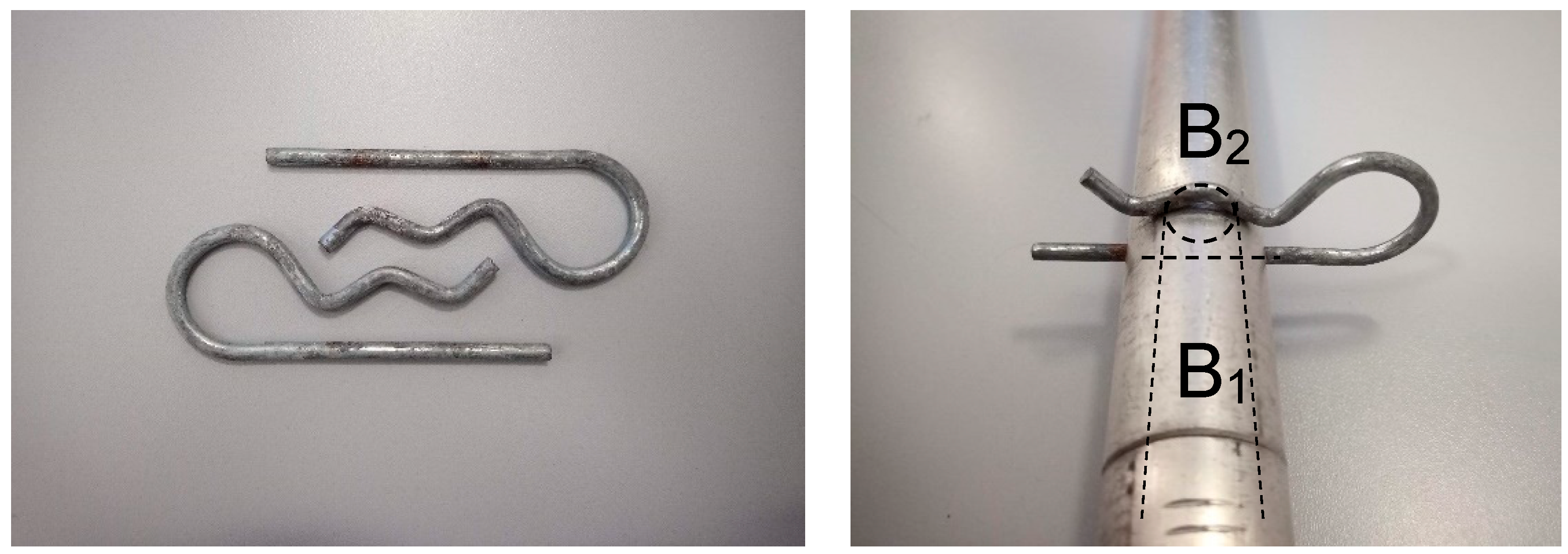
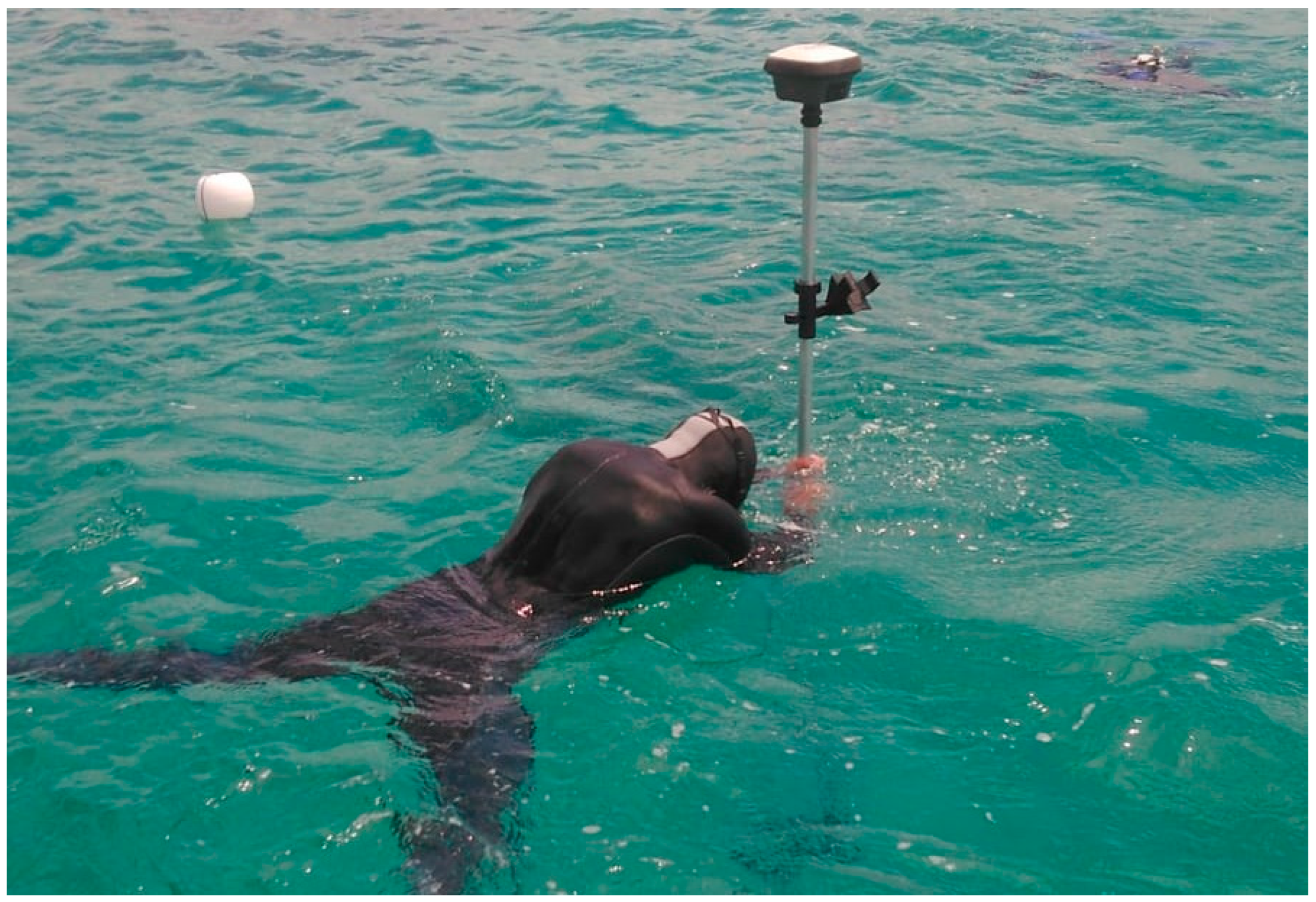
The position of the markers is measured using an aluminum pole on top of which a GNSS receiver is installed in an N-RTK configuration (nominal accuracies of 2–3 cm in planimetry and 3–4 cm in altimetry when connected to the HxGN SmartNet network).
A photogrammetric acquisition survey is carried out immediately after the markers have been placed.
Steps 2 and 3 are repeated 24 h after the first measurement.
On the first day of the survey, marker coordinates were measured with GNSS (
Table 7) and TS (
Table 8).
The coordinates were inserted in Agisoft Metashape (version 1.8.5) to correspond to the markers to check their position. The GSD of the photogrammetric survey was 0.5 mm/pix. The RMSE resulting from the processing is 0.020 m for the coordinates acquired with the GNSS (tilt-compensated) and 0.299 m for the coordinates acquired with the TS. The absolute difference of the coordinates is reported in the following
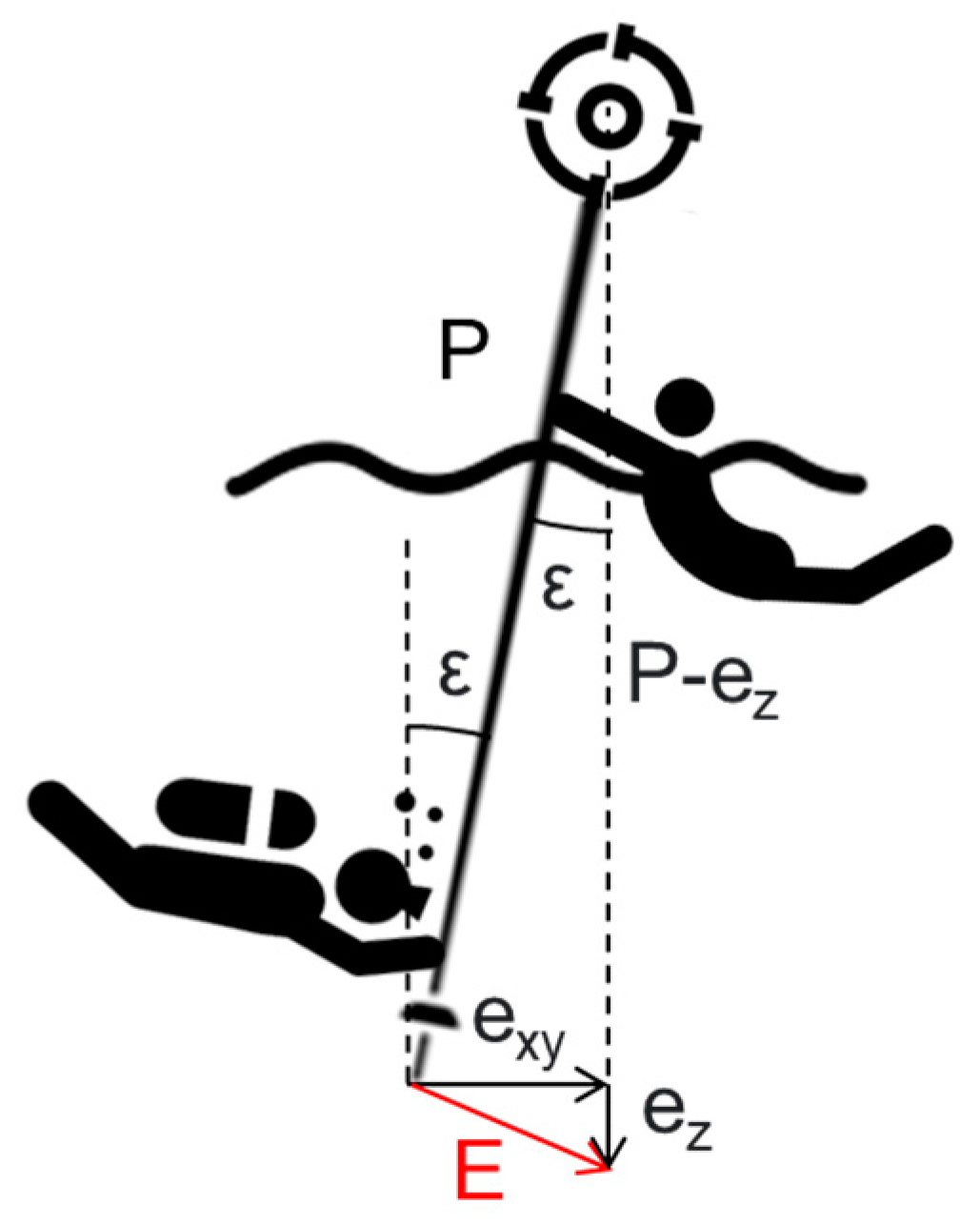
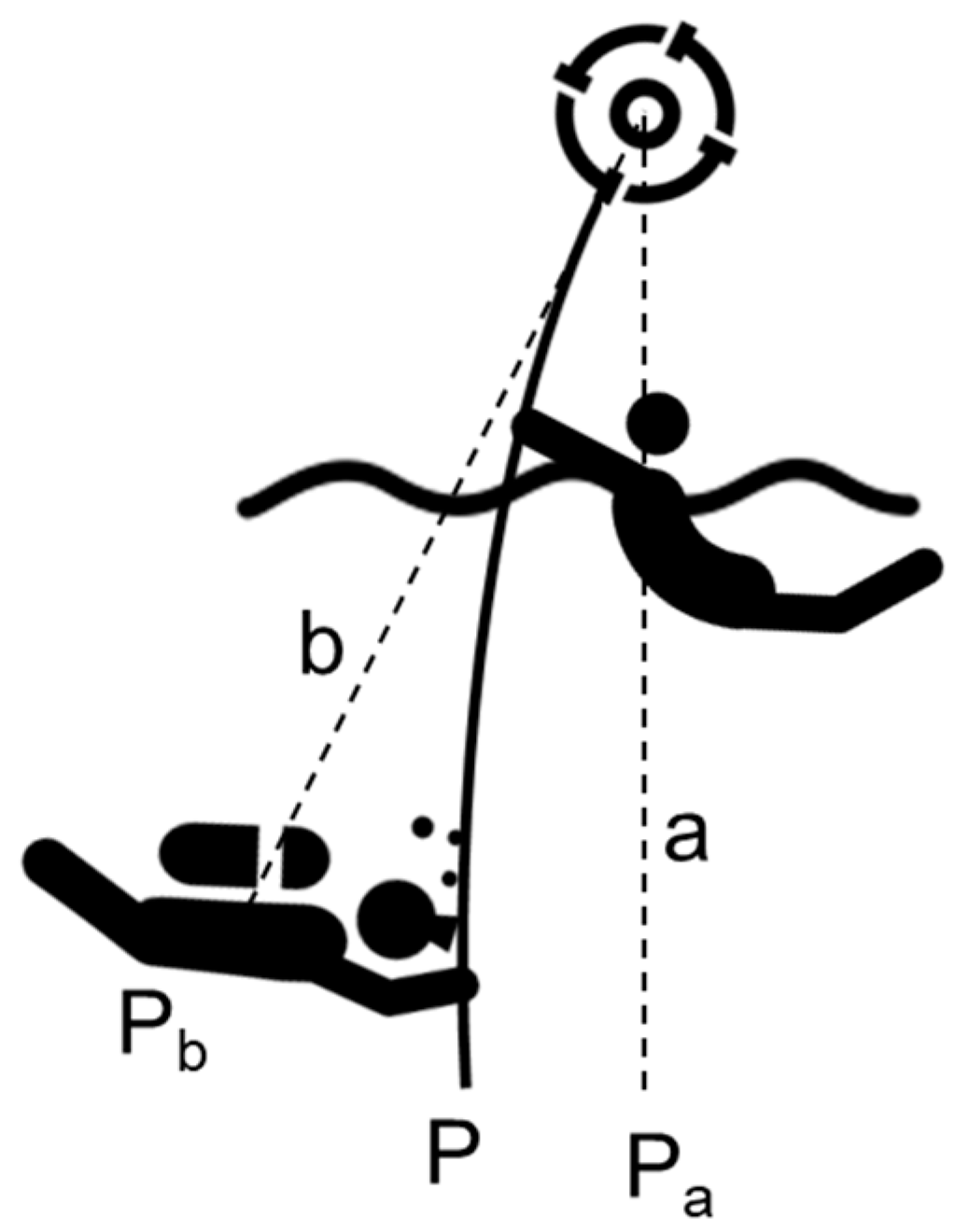
Table 9. This behavior is expected as the side shot TS measurements suffer the plano-altimetric error previously described (Formula (1) and
Table 3).
Another analysis concerns the stability of the conical markers, i.e., change of position on the seabed related to strong currents or other factors, such as flora and fauna disturbance or external human interactions (vessels or bathers unrelated to the survey operations). Therefore, the markers were re-measured with the GNSS N-RTK approach the following day, leaving them on the seabed overnight (
Table 10).
Table 8 shows the coordinate differences of all nine measured GCPs.
Table 11 shows that the difference between marker coordinates measured on the first and second days is relatively low and difficult to analyze as it coexists with the planimetric error of 2–3 cm and the altimetric error of 3–4 cm of the N-RTK survey.
To compensate for the GNSS systematisms, a comparison between point distances has been performed, as reported in the following
Table 12.
The coordinates were inserted in Agisoft Metashape (version 1.8.5) to correspond to the markers to check their position. The GSD of the photogrammetric survey was 0.5 mm/pix. The RMSE resulting from the processing is 0.024 m, which is acceptable for the survey’s needs.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





















