



Expanded Signal to Noise Ratio Estimates for Validating Next-Generation Satellite Sensors in Oceanic, Coastal, and Inland Waters

 , , and
, , and
Abstract
1. Introduction
2. Materials and Methods
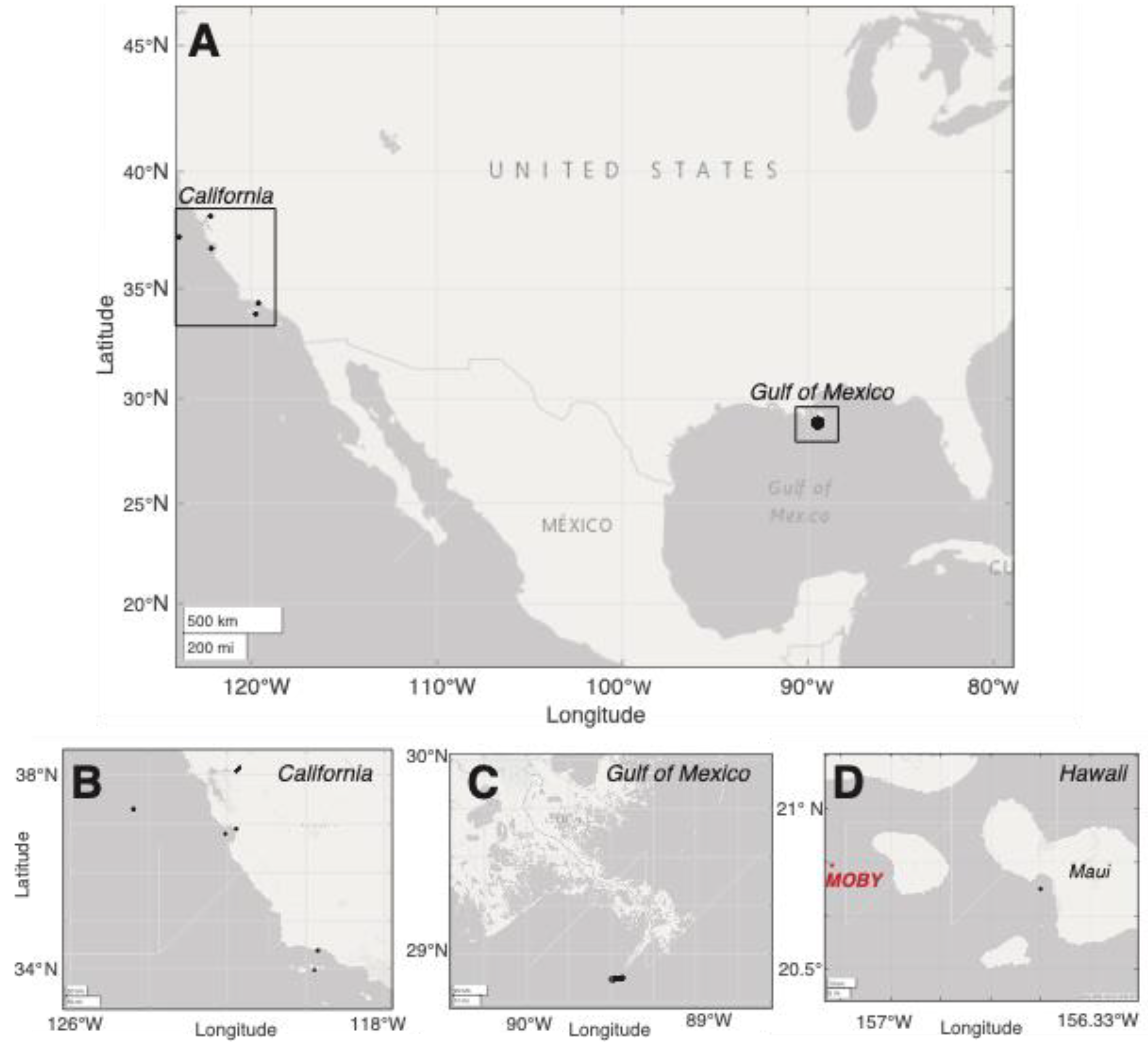
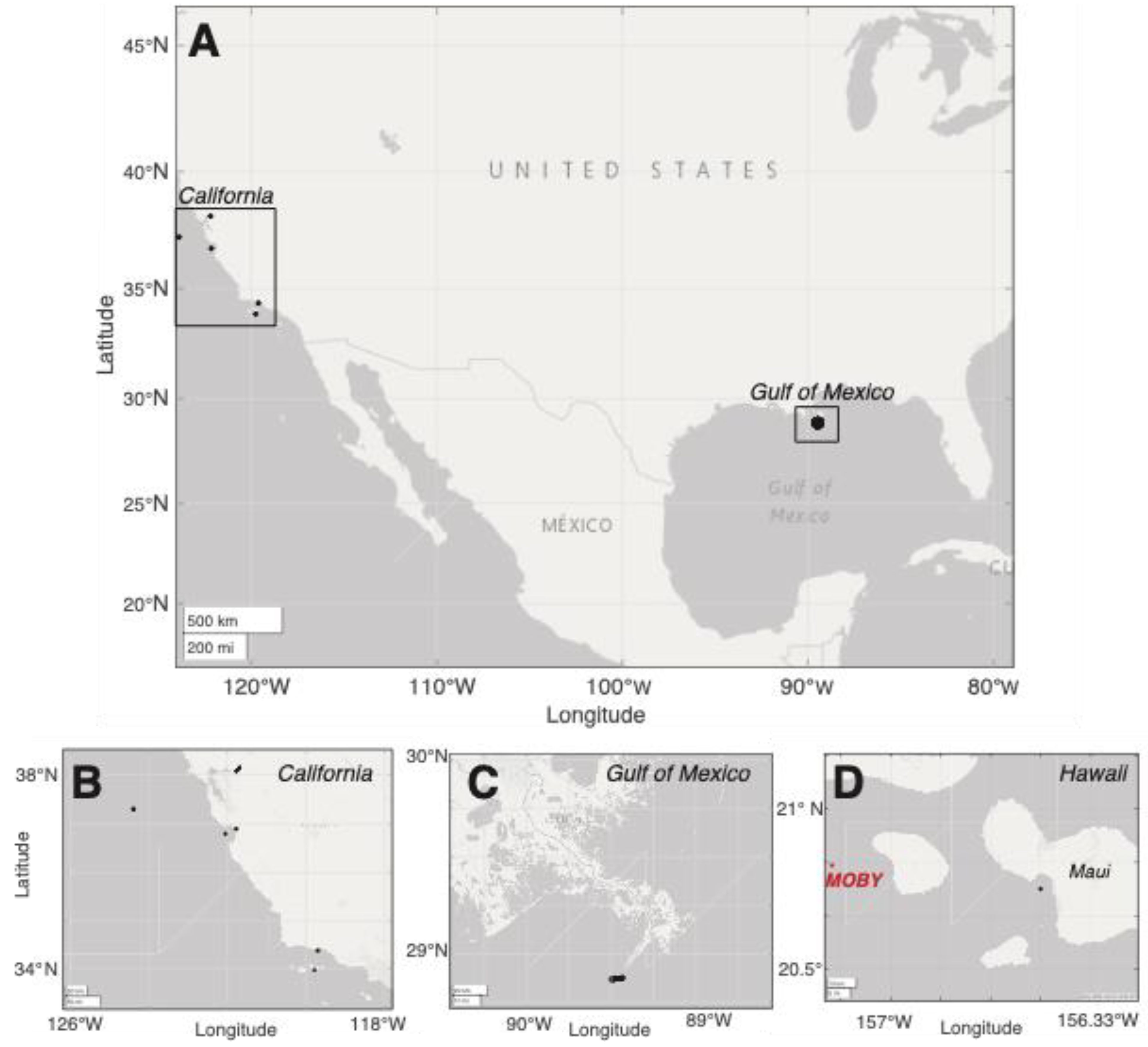
2.1. Field Sites and Targets
2.2. In-Water, Airborne, and Satellite Sensors
2.2.1. AVIRIS-NG Imagery
2.2.2. PRISM Imagery
2.2.3. C-AIR Data
2.2.4. HydroRad-3 Data
2.2.5. HyperSAS Data
2.3. Signal-to-Noise Ratio and Uncertainty Calculations
2.4. Uncertainties in Rrs and Derived Geophysical Products
3. Results
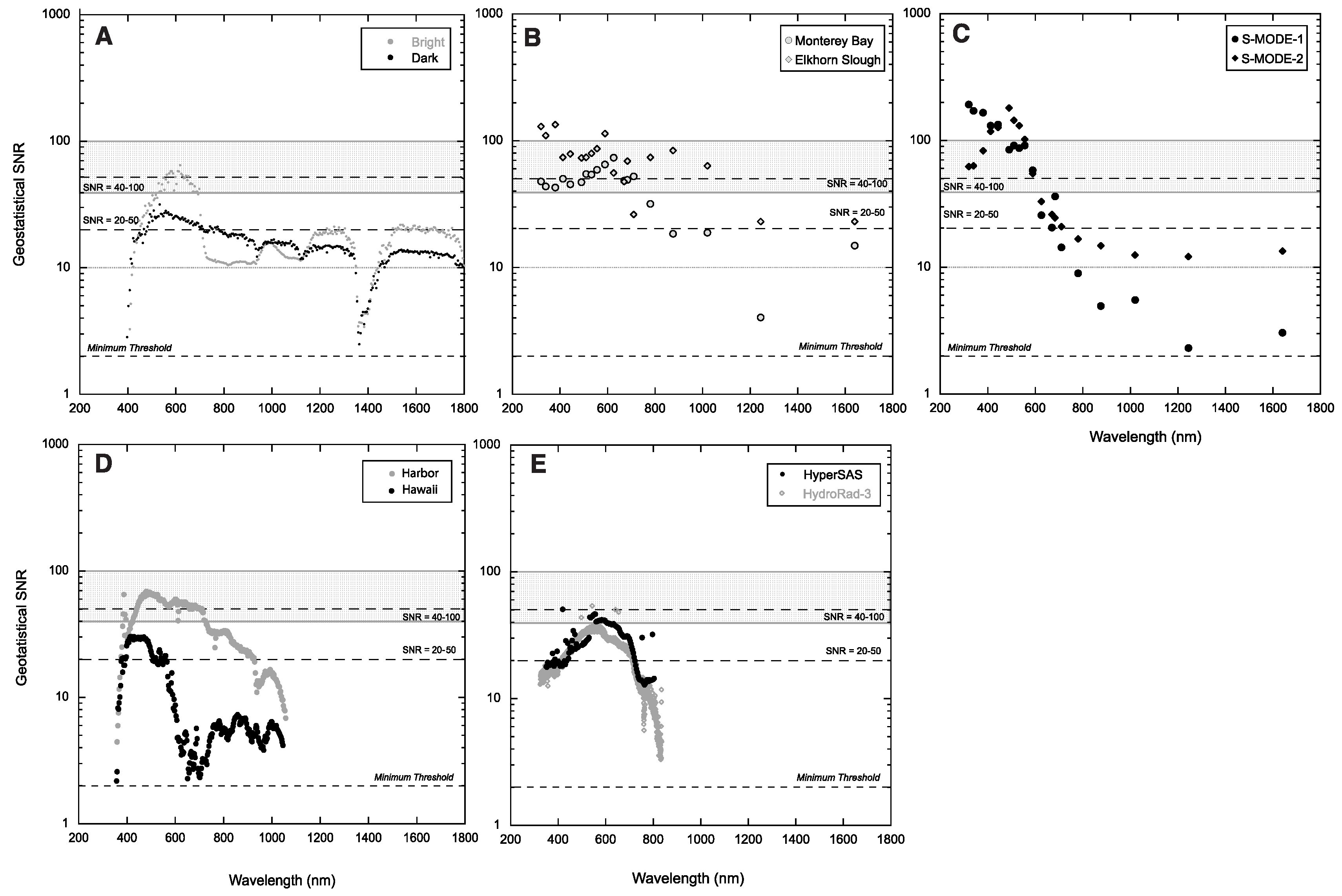
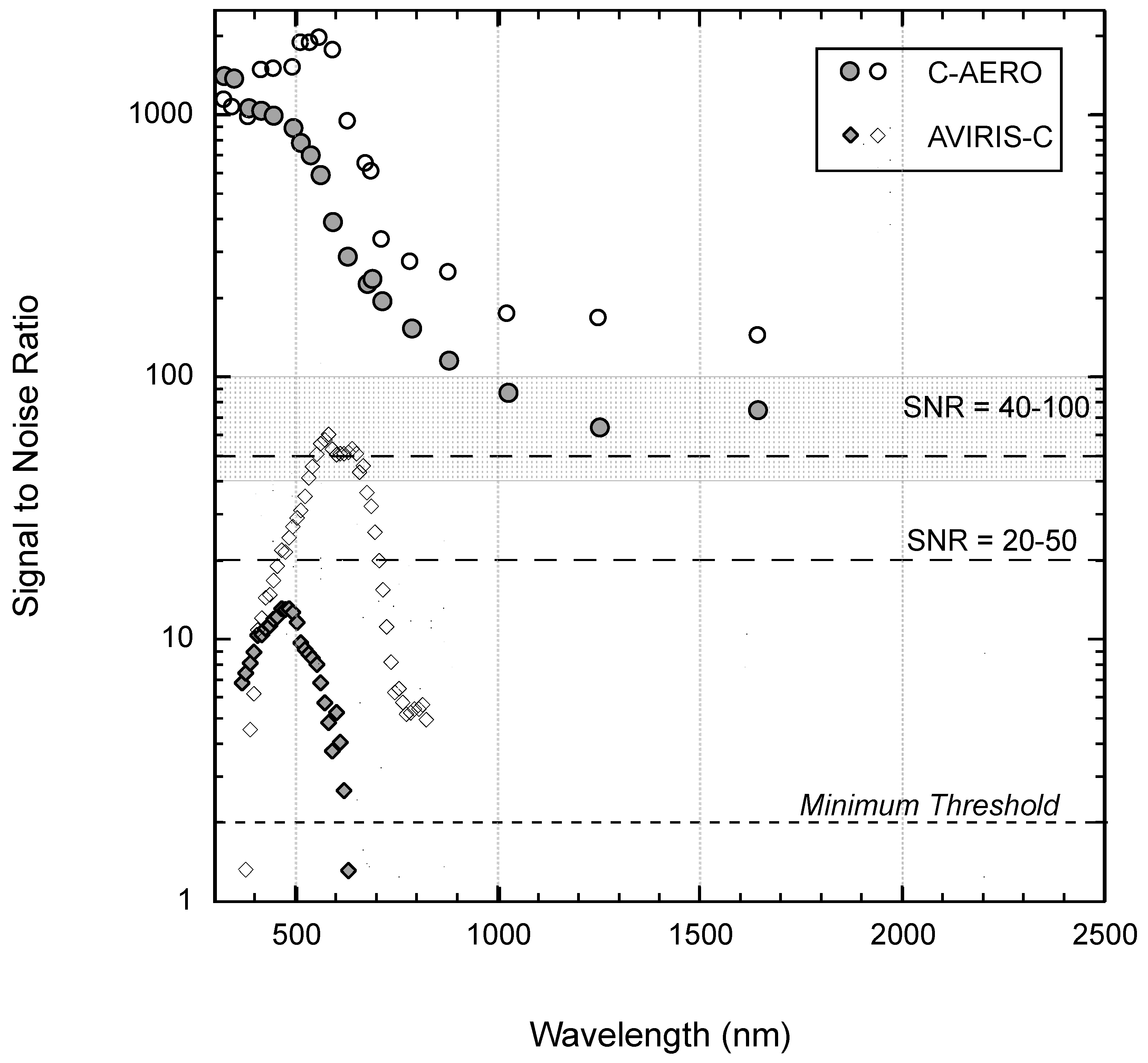
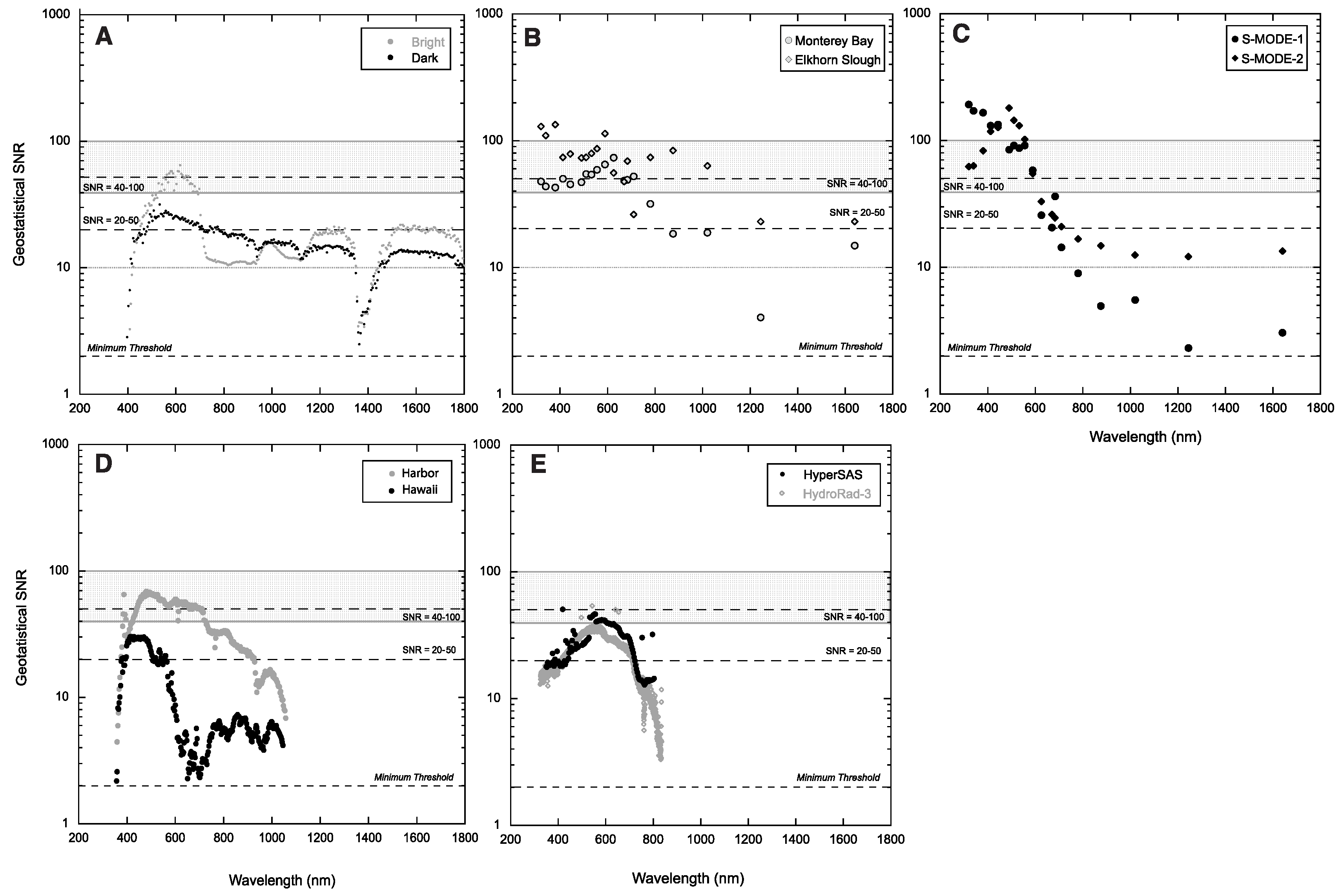
3.1. Geostatistical SNR
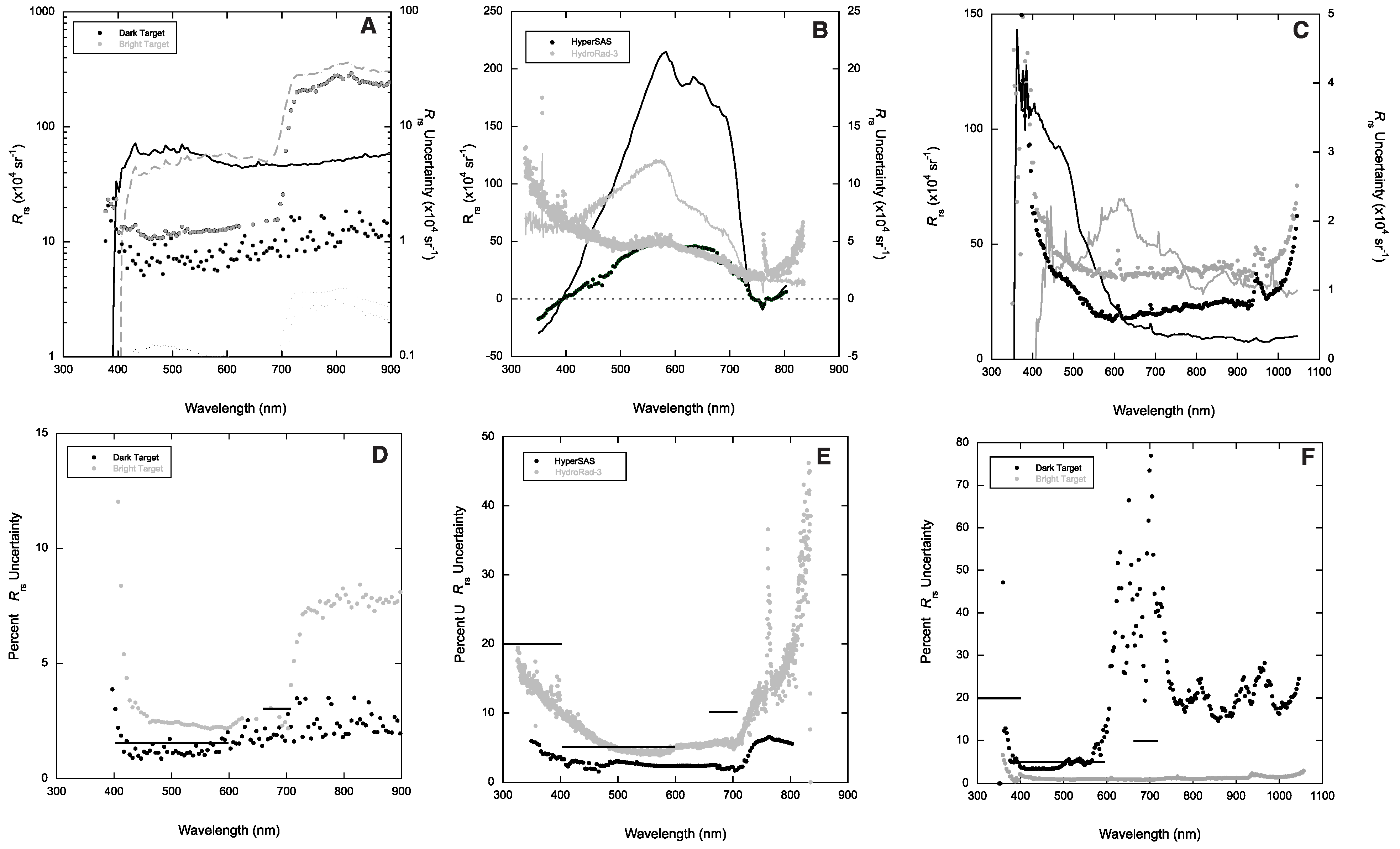
3.2. Airborne and Satellite-Derived Uncertainty
3.3. Derived Chlorophyll and NDVI

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Sensor | Algorithm | UE (%) | Biomass (NDVI, chla) | Source |
|---|---|---|---|---|---|
| Santa Barbara Channel | AVIRIS-NG | NDVI | 5.4 | 0.57 | This Study |
| Santa Barbara Channel | AVIRIS-C | NDVI | 0.7 | 0.97 | [21] |
| Santa Barbara Channel | OLI | NDVI | 0.9 | 0.80 | [21] |
| Santa Barbara Channel | MSI | NDVI | 8.2 | 0.34 | [21] |
| Santa Barbara Channel | RapidEye-2 | NDVI | 4.1 | 0.82 | [21] |
| Santa Barbara Channel | AVIRIS-NG | OC3M | 2.4 | 1.17 | This Study |
| Moss Landing Harbor | PRISM | OC3M | 0.7 | 3.66 | This Study |
| Maui, Hawaii | PRISM | OC3M | 1.3 | 0.31 | This Study |
| San Francisco Bay | C-AERO | OC3M | 0.1 | 8.08 (9.19) | [21] |
| Lake Tahoe | C-AERO | OC3M | 0.2 | 0.49 (0.44) | [21] |
| Central California (S-MODE) | C-AIR | OC3M | 0.2 | 0.21 | This Study |
| San Francisco Bay | OLCI | OC3M | 1.1 | 17.71 | [21] |
| San Francisco Bay | AVIRIS-C | OC3M | 40 | 3.58 | [21] |
| San Francisco Bay | OLI | OC3M | 1.1 | 2.75 | [21] |
| San Francisco Bay | MSI | OC3M | 4.1 | 3.52 | [21] |
| Gulf of Mexico | HyperSAS | OC3M | 2.3 | 1.90 (3.35) | This Study |
| San Francisco Bay | HydroRad-3 | OC3M | 10.5 | 2.84 (2.62) | This Study |
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sathyendranath, S. (Ed.) Remote Sensing of Ocean Colour in Coastal, and Other Optically-Complex, Waters; International Ocean-Colour Coordinating Group: Dartmouth, NS, Canada, 2000. [Google Scholar]
- Muller-Karger, F.E.; Hestir, E.; Ade, C.; Turpie, K.; Roberts, D.A.; Siegel, D.; Miller, R.J.; Humm, D.; Izenberg, N.; Keller, M.; et al. Satellite Sensor Requirements for Monitoring Essential Biodiversity Variables of Coastal Ecosystems. Ecol. Appl. 2018, 28, 749–760. [Google Scholar] [CrossRef] [PubMed]
- Morel, A.; Prieur, L. Analysis of Variations in Ocean Color1: Ocean Color Analysis. Limnol. Oceanogr. 1977, 22, 709–722. [Google Scholar] [CrossRef]
- Crossland, C.J.; Baird, D.; Ducrotoy, J.-P.; Lindeboom, H.; Buddemeier, R.W.; Dennison, W.C.; Maxwell, B.A.; Smith, S.V.; Swaney, D.P. The Coastal Zone—A Domain of Global Interactions. In Coastal Fluxes in the Anthropocene; Crossland, C.J., Kremer, H.H., Lindeboom, H.J., Marshall Crossland, J.I., Le Tissier, M.D.A., Eds.; Global Change—The IGBP Series; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1–37. ISBN 978-3-540-25450-8. [Google Scholar]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 Mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Dierssen, H.M.; Ackleson, S.G.; Joyce, K.E.; Hestir, E.L.; Castagna, A.; Lavender, S.; McManus, M.A. Living up to the Hype of Hyperspectral Aquatic Remote Sensing: Science, Resources and Outlook. Front. Environ. Sci. 2021, 9, 649528. [Google Scholar] [CrossRef]
- Aurin, D.; Mannino, A.; Franz, B. Spatially Resolving Ocean Color and Sediment Dispersion in River Plumes, Coastal Systems, and Continental Shelf Waters. Remote Sens. Environ. 2013, 137, 212–225. [Google Scholar] [CrossRef]
- Gorman, E.; Kubalak, D.A.; Deepak, P.; Dress, A.; Mott, D.B.; Meister, G.; Werdell, J. The NASA Plankton, Aerosol, Cloud, Ocean Ecosystem (PACE) Mission: An Emerging Era of Global, Hyperspectral Earth System Remote Sensing. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XXIII; Neeck, S.P., Kimura, T., Martimort, P., Eds.; SPIE: Strasbourg, France, 10 October 2019; p. 15. [Google Scholar]
- Cawse-Nicholson, K.; Townsend, P.A.; Schimel, D.; Assiri, A.M.; Blake, P.L.; Buongiorno, M.F.; Campbell, P.; Carmon, N.; Casey, K.A.; Correa-Pabón, R.E.; et al. NASA’s Surface Biology and Geology Designated Observable: A Perspective on Surface Imaging Algorithms. Remote Sens. Environ. 2021, 257, 112349. [Google Scholar] [CrossRef]
- Kahru, M.; Anderson, C.; Barton, A.D.; Carter, M.L.; Catlett, D.; Send, U.; Sosik, H.M.; Weiss, E.L.; Mitchell, B.G. Satellite Detection of Dinoflagellate Blooms off California by UV Reflectance Ratios. Elem. Sci. Anthr. 2021, 9, 00157. [Google Scholar] [CrossRef]
- Hooker, S.B.; Morrow, J.H.; Matsuoka, A. Apparent Optical Properties of the Canadian Beaufort Sea—Part 2: The 1% and 1 Cm Perspective in Deriving and Validating AOP Data Products. Biogeosciences 2013, 10, 4511–4527. [Google Scholar] [CrossRef]
- Frouin, R.J.; Franz, B.A.; Ibrahim, A.; Knobelspiesse, K.; Ahmad, Z.; Cairns, B.; Chowdhary, J.; Dierssen, H.M.; Tan, J.; Dubovik, O.; et al. Atmospheric Correction of Satellite Ocean-Color Imagery During the PACE Era. Front. Earth Sci. 2019, 7, 145. [Google Scholar] [CrossRef]
- Gao, B.-C.; Montes, M.J.; Davis, C.O.; Goetz, A.F.H. Atmospheric Correction Algorithms for Hyperspectral Remote Sensing Data of Land and Ocean. Remote Sens. Environ. 2009, 113, S17–S24. [Google Scholar] [CrossRef]
- He, X.; Bai, Y.; Pan, D.; Tang, J.; Wang, D. Atmospheric Correction of Satellite Ocean Color Imagery Using the Ultraviolet Wavelength for Highly Turbid Waters. Opt. Express 2012, 20, 20754. [Google Scholar] [CrossRef] [PubMed]
- Hooker, S.B.; Houskeeper, H.F.; Lind, R.N.; Suzuki, K. One- and Two-Band Sensors and Algorithms to Derive aCDOM(440) from Global Above- and In-Water Optical Observations. Sensors 2021, 21, 5384. [Google Scholar] [CrossRef] [PubMed]
- Hooker, S.B.; Matsuoka, A.; Kudela, R.M.; Yamashita, Y.; Suzuki, K.; Houskeeper, H.F. A Global End-Member Approach to Derive aCDOM(440) from near-Surface Optical Measurements. Biogeosciences 2020, 17, 475–497. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Roberts, D.A.; Dennison, P.E.; Hulley, G.C. Special Issue on the Hyperspectral Infrared Imager (HyspIRI): Emerging Science in Terrestrial and Aquatic Ecology, Radiation Balance and Hazards. Remote Sens. Environ. 2015, 167, 1–5. [Google Scholar] [CrossRef]
- University of Maine; Haëntjens, N.; Forsythe, K.; Denholm, B.; Loftin, J.; Boss, E. pySAS: Autonomous Solar Tracking System for Surface Water Radiometric Measurements. Oceanography 2022, 35, 55–59. [Google Scholar] [CrossRef]
- Zibordi, G.; Holben, B.; Hooker, S.B.; Mélin, F.; Berthon, J.-F.; Slutsker, I.; Giles, D.; Vandemark, D.; Feng, H.; Rutledge, K.; et al. A Network for Standardized Ocean Color Validation Measurements. Eos Trans. AGU 2006, 87, 293. [Google Scholar] [CrossRef]
- Zibordi, G.; Holben, B.N.; Talone, M.; D’Alimonte, D.; Slutsker, I.; Giles, D.M.; Sorokin, M.G. Advances in the Ocean Color Component of the Aerosol Robotic Network (AERONET-OC). J. Atmos. Ocean. Technol. 2021, 38, 725–746. [Google Scholar] [CrossRef]
- Kudela, R.M.; Hooker, S.B.; Houskeeper, H.F.; McPherson, M. The Influence of Signal to Noise Ratio of Legacy Airborne and Satellite Sensors for Simulating Next-Generation Coastal and Inland Water Products. Remote Sens. 2019, 11, 2071. [Google Scholar] [CrossRef]
- Mouw, C.B.; Hardman-Mountford, N.J.; Alvain, S.; Bracher, A.; Brewin, R.J.W.; Bricaud, A.; Ciotti, A.M.; Devred, E.; Fujiwara, A.; Hirata, T.; et al. A Consumer’s Guide to Satellite Remote Sensing of Multiple Phytoplankton Groups in the Global Ocean. Front. Mar. Sci. 2017, 4, 41. [Google Scholar] [CrossRef]
- Wang, M.; Gordon, H.R. Sensor Performance Requirements for Atmospheric Correction of Satellite Ocean Color Remote Sensing. Opt. Express 2018, 26, 7390. [Google Scholar] [CrossRef]
- Del Castillo, C.E. Pre-Aerosol, Clouds, and Ocean Ecosystem (PACE) Mission Science Definition Team Report; Goddard Space Flight Center: Greenbelt, MD, USA, 2012. [Google Scholar]
- Taylor, N.C.; Kudela, R.M. Spatial Variability of Suspended Sediments in San Francisco Bay, California. Remote Sens. 2021, 13, 4625. [Google Scholar] [CrossRef]
- Curran, P.J.; Dungan, J.L. Estimation of Signal-to-Noise: A New Procedure Applied to AVIRIS Data. IEEE Trans. Geosci. Remote Sens. 1989, 27, 620–628. [Google Scholar] [CrossRef]
- Carpenter, R.; Dierssen, H.; Hochberg, E.; Lee, Z. CORAL. SeaWiFS Bio-optical Archive and Storage System (SeaBASS); NASA: Greenbelt, MD, USA, 2019. [CrossRef]
- Verma, N.; Lohrenz, S.; Chakraborty, S.; Fichot, C.G. Underway Hyperspectral Bio-Optical Assessments of Phytoplankton Size Classes in the River-Influenced Northern Gulf of Mexico. Remote Sens. 2021, 13, 3346. [Google Scholar] [CrossRef]
- Lohrenz, S. GulfCarbon. SeaWiFS Bio-optical Archive and Storage System (SeaBASS); NASA: Greenbelt, MD, USA, 2013. [CrossRef]
- Thompson, D.R.; Gao, B.-C.; Green, R.O.; Roberts, D.A.; Dennison, P.E.; Lundeen, S.R. Atmospheric Correction for Global Mapping Spectroscopy: ATREM Advances for the HyspIRI Preparatory Campaign. Remote Sens. Environ. 2015, 167, 64–77. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Labs, D.; Foujois, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The Solar Spectral Irradiance from 200 to 2400 Nm as Measured by the SOLSPEC Spectrometer from the Atlas and Eureca Missions. Solar Physics 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Guild, L.S.; Kudela, R.M.; Hooker, S.B.; Palacios, S.L.; Houskeeper, H.F. Airborne Radiometry for Calibration, Validation, and Research in Oceanic, Coastal, and Inland Waters. Front. Environ. Sci. 2020, 8, 585529. [Google Scholar] [CrossRef]
- Guild, L.; Morrow, J.; Kudela, R.; Myers, J.; Palacios, S.; Torres-Perez, J.; Negrey, K.; Dunagan, S.; Johnson, R.; Kacenelenbogen, M. Airborne Calibration, Validation, and Research Instrumentation for Current and Next Generation Satellite Ocean Color Observations. In Proceedings of the Optical Sensors and Sensing Congress (ES, FTS, HISE, Sensors); OSA: San Jose, CA, USA, 2019; p. HTu2C.2. [Google Scholar]
- Hooker, S.B.; Lind, R.N.; Morrow, J.H.; Brown, J.W.; Suzuki, K.; Houskeeper, H.F.; Hirowake, T.; Maúre, E.D.R. Advances in Above- and in-Water Radiometry, Volume 1: Enhanced Legacy and State-of-the-Art Instrument Suites; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2018.
- Hooker, S.B.; Houskeeper, H.F.; Lind, R.N.; Kudela, R.M.; Suzuki, K. Verification and Validation of Hybridspectral Radiometry Obtained from an Unmanned Surface Vessel (USV) in the Open and Coastal Oceans. Remote Sens. 2022, 14, 1084. [Google Scholar] [CrossRef]
- Houskeeper, H.F.; Hooker, S.B.; Lind, R.N. Expansive Linear Responsivity for Earth and Planetary Radiometry. J. Atmos. Oceanic Tech. 2024; in revision. [Google Scholar]
- Mueller, J.L. Overview of Measurement and Data Analysis Protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 2; NASA: Greenbelt, MD, USA, 2000; pp. 87–97. [Google Scholar]
- Mueller, J.L. Overview of Measurement and Data Analysis Protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 3, Volume 1; NASA: Greenbelt, MD, USA, 2002; pp. 123–137. [Google Scholar]
- Mueller, J.L. Overview of Measurement and Data Analysis Protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 4, Volume III; NASA: Greenbelt, MD, USA, 2002; pp. 1–20. [Google Scholar]
- Mueller, J.L.; Austin, R.W. Ocean Optics Protocols for SeaWiFS Validation; NASA: Greenbelt, MD, USA, 1992; p. 43.
- Mueller, J.L.; Austin, R.W. Ocean Optics Protocols for SeaWiFS Validation, Revision 1; NASA: Greenbelt, MD, USA, 1995; p. 66.
- Moses, W.J.; Bowles, J.H.; Lucke, R.L.; Corson, M.R. Impact of Signal-to-Noise Ratio in a Hyperspectral Sensor on the Accuracy of Biophysical Parameter Estimation in Case II Waters. Opt. Express 2012, 20, 4309. [Google Scholar] [CrossRef]
- Qi, L.; Lee, Z.; Hu, C.; Wang, M. Requirement of Minimal Signal-to-Noise Ratios of Ocean Color Sensors and Uncertainties of Ocean Color Products: OCEAN COLOR SIGNAL-TO-NOISE RATIO. J. Geophys. Res. Oceans 2017, 122, 2595–2611. [Google Scholar] [CrossRef]
- Schwanghart, W. Variogramfit. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/25948-variogramfit (accessed on 1 March 2023).
- McPherson, M.L.; Kudela, R.M. Kelp Patch-Specific Characteristics Limit Detection Capability of Rapid Survey Method for Determining Canopy Biomass Using an Unmanned Aerial Vehicle. Front. Environ. Sci. 2022, 10, 690963. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic Applications of MSI Imagery. In Proceedings of the 2016 ESA Living Planet Symposium, Prague, Czech Republic, 9 May 2016; pp. 9–13. [Google Scholar]
- Mobley, C.D. Estimation of the Remote-Sensing Reflectance from above-Surface Measurements. Appl. Opt. 1999, 38, 7442. [Google Scholar] [CrossRef] [PubMed]
- Brown, S.W.; Flora, S.J.; Feinholz, M.E.; Yarbrough, M.A.; Houlihan, T.; Peters, D.; Kim, Y.S.; Mueller, J.L.; Johnson, B.C.; Clark, D.K. The Marine Optical Buoy (MOBY) Radiometric Calibration and Uncertainty Budget for Ocean Color Satellite Sensor Vicarious Calibration. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XI, Florence, Italy, 5 October 2007; Meynart, R., Neeck, S.P., Shimoda, H., Habib, S., Eds.; p. 67441M. [Google Scholar]
- Kahru, M.; Kudela, R.M.; Manzano-Sarabia, M.; Greg Mitchell, B. Trends in the Surface Chlorophyll of the California Current: Merging Data from Multiple Ocean Color Satellites. Deep Sea Res. Part II Top. Stud. Oceanogr. 2012, 77–80, 89–98. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Werdell, P.J. Chlorophyll Algorithms for Ocean Color Sensors—OC4, OC5 & OC6. Remote Sens. Environ. 2019, 229, 32–47. [Google Scholar] [CrossRef] [PubMed]
- Houskeeper, H.F.; Hooker, S.B. Extending Aquatic Spectral Information with the First Radiometric IR-B Field Observations. PNAS Nexus 2023, 2, pgad340. [Google Scholar] [CrossRef]
- Hooker, S.B.; Houskeeper, H.F.; Kudela, R.M.; Matsuoka, A.; Suzuki, K.; Isada, T. Spectral Modes of Radiometric Measurements in Optically Complex Waters. Cont. Shelf Res. 2021, 219, 104357. [Google Scholar] [CrossRef]
- Antoine, D.; Guevel, P.; Desté, J.-F.; Bécu, G.; Louis, F.; Scott, A.J.; Bardey, P. The “BOUSSOLE” Buoy—A New Transparent-to-Swell Taut Mooring Dedicated to Marine Optics: Design, Tests, and Performance at Sea. J. Atmos. Ocean. Technol. 2008, 25, 968–989. [Google Scholar] [CrossRef]
- Werdell, P.J.; Bailey, S.W. An Improved In-Situ Bio-Optical Data Set for Ocean Color Algorithm Development and Satellite Data Product Validation. Remote Sens. Environ. 2005, 98, 122–140. [Google Scholar] [CrossRef]
- Gerbi, G.P.; Boss, E.; Werdell, P.J.; Proctor, C.W.; Haëntjens, N.; Lewis, M.R.; Brown, K.; Sorrentino, D.; Zaneveld, J.R.V.; Barnard, A.H.; et al. Validation of Ocean Color Remote Sensing Reflectance Using Autonomous Floats. J. Atmos. Ocean. Technol. 2016, 33, 2331–2352. [Google Scholar] [CrossRef]
- Wang, Y.; Lee, Z.; Wei, J.; Shang, S.; Wang, M.; Lai, W. Extending Satellite Ocean Color Remote Sensing to the Near-Blue Ultraviolet Bands. Remote Sens. Environ. 2021, 253, 112228. [Google Scholar] [CrossRef]
- IOCCG. Ocean Optics and Biogeochemistry Protocols for Satellite Ocean Colour Sensor Validation, Volume 3.0: Protocols for Satellite Ocean Colour Data Validation: In Situ Optical Radiometry; International Ocean Colour Coordinating Group (IOCCG): Dartmouth, NS, Canada, 2019. [Google Scholar]
- Cao, F.; Miller, W.L. A New Algorithm to Retrieve Chromophoric Dissolved Organic Matter (CDOM) Absorption Spectra in the UV from Ocean Color. J. Geophys. Res. Ocean. 2015, 120, 496–516. [Google Scholar] [CrossRef]
- Vantrepotte, V.; Danhiez, F.-P.; Loisel, H.; Ouillon, S.; Mériaux, X.; Cauvin, A.; Dessailly, D. CDOM-DOC Relationship in Contrasted Coastal Waters: Implication for DOC Retrieval from Ocean Color Remote Sensing Observation. Opt. Express 2015, 23, 33. [Google Scholar] [CrossRef] [PubMed]
- Aurin, D.; Mannino, A.; Lary, D. Remote Sensing of CDOM, CDOM Spectral Slope, and Dissolved Organic Carbon in the Global Ocean. Appl. Sci. 2018, 8, 2687. [Google Scholar] [CrossRef] [PubMed]
- Houskeeper, H.F.; Hooker, S.B.; Kudela, R.M. Spectral Range within Global aCDOM(440) Algorithms for Oceanic, Coastal, and Inland Waters with Application to Airborne Measurements. Remote Sens. Environ. 2021, 253, 112155. [Google Scholar] [CrossRef]
- Franz, B.A.; Bailey, S.W.; Kuring, N.; Werdell, P.J. Ocean Color Measurements with the Operational Land Imager on Landsat-8: Implementation and Evaluation in SeaDAS. J. Appl. Remote Sens 2015, 9, 096070. [Google Scholar] [CrossRef]
- Pahlevan, N.; Sarkar, S.; Franz, B.A.; Balasubramanian, S.V.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) Data Processing for Aquatic Science Applications: Demonstrations and Validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Pahlevan, N.; Lee, Z.; Wei, J.; Schaaf, C.B.; Schott, J.R.; Berk, A. On-Orbit Radiometric Characterization of OLI (Landsat-8) for Applications in Aquatic Remote Sensing. Remote Sens. Environ. 2014, 154, 272–284. [Google Scholar] [CrossRef]
- Gerace, A.D.; Schott, J.R.; Nevins, R. Increased Potential to Monitor Water Quality in the Near-Shore Environment with Landsat’s next-Generation Satellite. J. Appl. Remote Sens. 2013, 7, 073558. [Google Scholar] [CrossRef]
- Groom, S.; Sathyendranath, S.; Ban, Y.; Bernard, S.; Brewin, R.; Brotas, V.; Brockmann, C.; Chauhan, P.; Choi, J.; Chuprin, A.; et al. Satellite Ocean Colour: Current Status and Future Perspective. Front. Mar. Sci. 2019, 6, 485. [Google Scholar] [CrossRef]
- Devred, E.; Turpie, K.; Moses, W.; Klemas, V.; Moisan, T.; Babin, M.; Toro-Farmer, G.; Forget, M.-H.; Jo, Y.-H. Future Retrievals of Water Column Bio-Optical Properties Using the Hyperspectral Infrared Imager (HyspIRI). Remote Sens. 2013, 5, 6812–6837. [Google Scholar] [CrossRef]
- Bracher, A.; Bouman, H.A.; Brewin, R.J.W.; Bricaud, A.; Brotas, V.; Ciotti, A.M.; Clementson, L.; Devred, E.; Di Cicco, A.; Dutkiewicz, S.; et al. Obtaining Phytoplankton Diversity from Ocean Color: A Scientific Roadmap for Future Development. Front. Mar. Sci. 2017, 4, 55. [Google Scholar] [CrossRef]
- Kramer, S.J.; Siegel, D.A.; Maritorena, S.; Catlett, D. Modeling Surface Ocean Phytoplankton Pigments from Hyperspectral Remote Sensing Reflectance on Global Scales. Remote Sens. Environ. 2022, 270, 112879. [Google Scholar] [CrossRef]
- Ayasse, A.K.; Thorpe, A.K.; Cusworth, D.H.; Kort, E.A.; Negron, A.G.; Heckler, J.; Asner, G.; Duren, R.M. Methane Remote Sensing and Emission Quantification of Offshore Shallow Water Oil and Gas Platforms in the Gulf of Mexico. Environ. Res. Lett. 2022, 17, 084039. [Google Scholar] [CrossRef]
- Bradley, E.S.; Leifer, I.; Roberts, D.A.; Dennison, P.E.; Washburn, L. Detection of Marine Methane Emissions with AVIRIS Band Ratios: AVIRIS methane detection. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gao, B.-C.; Li, R.-R.; Berdnikov, S.; Saprygin, V. Estimation of Chlorophyll-a Concentration in Productive Turbid Waters Using a Hyperspectral Imager for the Coastal Ocean—The Azov Sea Case Study. Environ. Res. Lett. 2011, 6, 024023. [Google Scholar] [CrossRef]
- Moses, W.J.; Gitelson, A.A.; Berdnikov, S.; Saprygin, V.; Povazhnyi, V. Operational MERIS-Based NIR-Red Algorithms for Estimating Chlorophyll-a Concentrations in Coastal Waters—The Azov Sea Case Study. Remote Sens. Environ. 2012, 121, 118–124. [Google Scholar] [CrossRef]
- Ryan, J.; Davis, C.; Tufillaro, N.; Kudela, R.; Gao, B.-C. Application of the Hyperspectral Imager for the Coastal Ocean to Phytoplankton Ecology Studies in Monterey Bay, CA, USA. Remote Sens. 2014, 6, 1007–1025. [Google Scholar] [CrossRef]
- Cael, B.B.; Bisson, K.; Boss, E.; Erickson, Z.K. How Many Independent Quantities Can Be Extracted from Ocean Color? Limnol. Ocean. Lett. 2023, 8, 603–610. [Google Scholar] [CrossRef]
- Bausell, J.T.; Kudela, R.M. Modeling Hyperspectral Normalized Water-Leaving Radiance in a Dynamic Coastal Ecosystem. Opt. Express 2021, 29, 24010. [Google Scholar] [CrossRef]
- Yulong, G.; Changchun, H.; Yunmei, L.; Chenggong, D.; Lingfei, S.; Yuan, L.; Weiqiang, C.; Hejie, W.; Enxiang, C.; Guangxing, J. Hyperspectral Reconstruction Method for Optically Complex Inland Waters Based on Bio-Optical Model and Sparse Representing. Remote Sens. Environ. 2022, 276, 113045. [Google Scholar] [CrossRef]
- Chien, S.; Boerkoel, J.; Mason, J.; Wang, D.; Davies, A.; Mueting, J.; Vittaldev, V.; Shah, V.; Zuleta, I. Leveraging Space and Ground Assets in A Sensorweb for Scientific Monitoring: Early Results and Opportunities for the Future. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3833–3836. [Google Scholar]
- Pahlevan, N.; Chittimalli, S.K.; Balasubramanian, S.V.; Vellucci, V. Sentinel-2/Landsat-8 Product Consistency and Implications for Monitoring Aquatic Systems. Remote Sens. Environ. 2019, 220, 19–29. [Google Scholar] [CrossRef]
- Knobelspiesse, K.D.; Cairns, B.; Cetinić, I.; Craig, S.; Franz, B.A.; Gao, M.; Ibrahim, A.; Mannino, A.; Sayer, A.; Werdell, P.J. PACE Technical Report Series, Volume 11: The PACE Postlaunch Airborne eXperiment (PACE-PAX); UMBC Faculty Collection; Goddard Space Flight Center: Greenbelt, MD, USA, 2023. [Google Scholar]
- Dierssen, H.M.; Gierach, M.; Guild, L.S.; Mannino, A.; Salisbury, J.; Uz, S.S.; Scott, J.; Townsend, P.A.; Turpie, K.; Tzortziou, M.; et al. Synergies between NASA’s Hyperspectral Aquatic Missions PACE, GLIMR, and SBG: Opportunities for New Science and Applications. JGR Biogeosci. 2023, 128, e2023JG007574. [Google Scholar] [CrossRef]
- Mondal, S.; Guha, A.; Pal, S.K. Comparative Analysis of AVIRIS-NG and Landsat-8 OLI Data for Lithological Mapping in Parts of Sittampundi Layered Complex, Tamil Nadu, India. Adv. Space Res. 2022, 69, 1408–1426. [Google Scholar] [CrossRef]
| Sensor | Date | Resolution (m) | Spectral Range (Resolution) nm | Atmospheric Correction |
|---|---|---|---|---|
| S-MODE, Monterey Bay, Elkhorn Slough | ||||
| C-AIR | 28-Oct-21 | 3.5 | 320–1640 (10) * | Not Necessary |
| PRISM | 24-Jul-12 | 1.0 | 350–1054 (3.5) | ATREM |
| San Francisco Bay | ||||
| HydroRad-3 | 23-Oct-19 | 95.8 | 350–850 (1.1) | Not Necessary |
| Gulf of Mexico | ||||
| HyperSAS | 22-Apr-09 | 16.2 | 350–800 (3.5) | Not Necessary |
| Hawaii | ||||
| PRISM | 17-Feb-17 | 16.2 | 350–1054 (3.5) | ATREM |
| Santa Barbara Channel | ||||
| AVIRIS-NG | 17-Apr-21 | 7.9 | 380–2510 (5) | ATREM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kudela, R.M.; Hooker, S.B.; Guild, L.S.; Houskeeper, H.F.; Taylor, N. Expanded Signal to Noise Ratio Estimates for Validating Next-Generation Satellite Sensors in Oceanic, Coastal, and Inland Waters. Remote Sens. 2024, 16, 1238. https://doi.org/10.3390/rs16071238
Kudela RM, Hooker SB, Guild LS, Houskeeper HF, Taylor N. Expanded Signal to Noise Ratio Estimates for Validating Next-Generation Satellite Sensors in Oceanic, Coastal, and Inland Waters. Remote Sensing. 2024; 16(7):1238. https://doi.org/10.3390/rs16071238
Chicago/Turabian StyleKudela, Raphael M., Stanford B. Hooker, Liane S. Guild, Henry F. Houskeeper, and Niky Taylor. 2024. "Expanded Signal to Noise Ratio Estimates for Validating Next-Generation Satellite Sensors in Oceanic, Coastal, and Inland Waters" Remote Sensing 16, no. 7: 1238. https://doi.org/10.3390/rs16071238
APA StyleKudela, R. M., Hooker, S. B., Guild, L. S., Houskeeper, H. F., & Taylor, N. (2024). Expanded Signal to Noise Ratio Estimates for Validating Next-Generation Satellite Sensors in Oceanic, Coastal, and Inland Waters. Remote Sensing, 16(7), 1238. https://doi.org/10.3390/rs16071238