In this section, the robustness of the proposed method to SNR, the jammer’s position, and the number of the accumulated pulses is discussed in detail. In the experiment, a large number of training samples are generated based on the parameters of several typical spaceborne SAR. These parameters mainly include satellite orbital altitude, transmitting carrier frequency, antenna size, and received signal-to-noise ratio. As a result, 3600 train set samples were generated for each of the three operating modes of stripmap, scan, and spotlight. The specific parameter-setting ranges for the train set are shown in the following table (
Table 1).
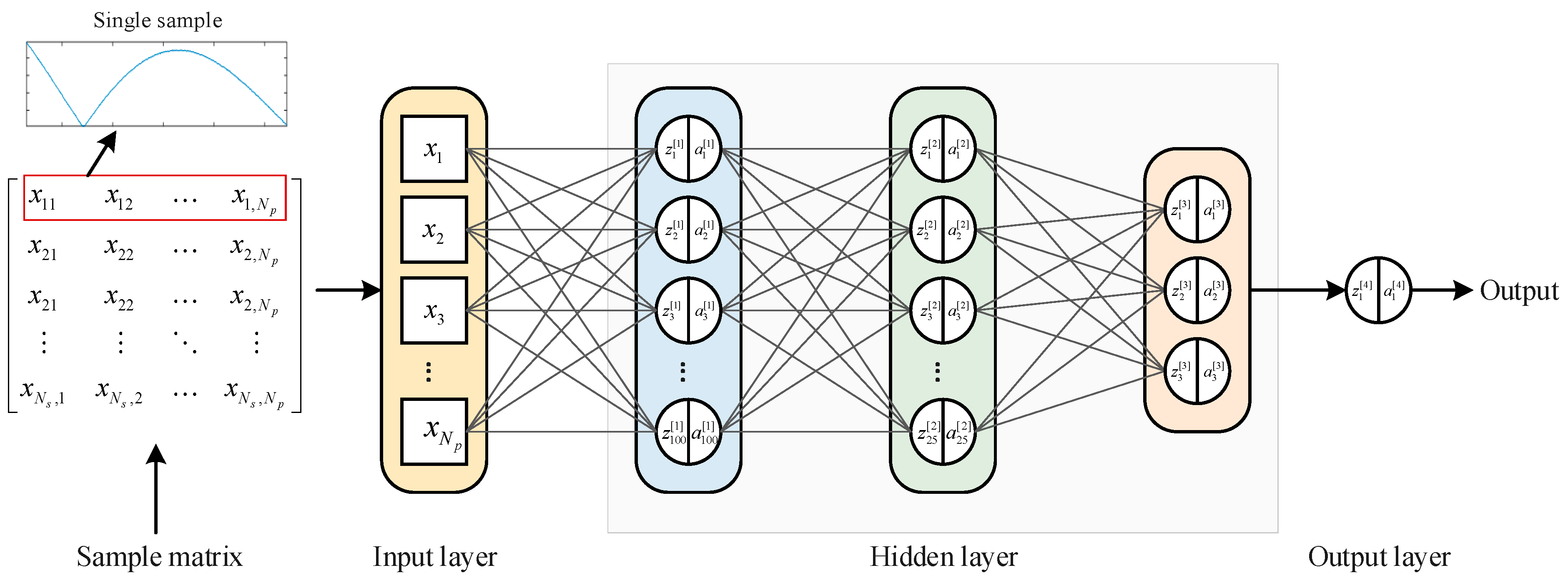
The simulation uses the back propagation (BP) neural network, which is set as a four-layer network model. The feature numbers of each layer are, respectively, 1000, 100, 25, and 3. The network structure is shown in the following figure (
Figure 9).
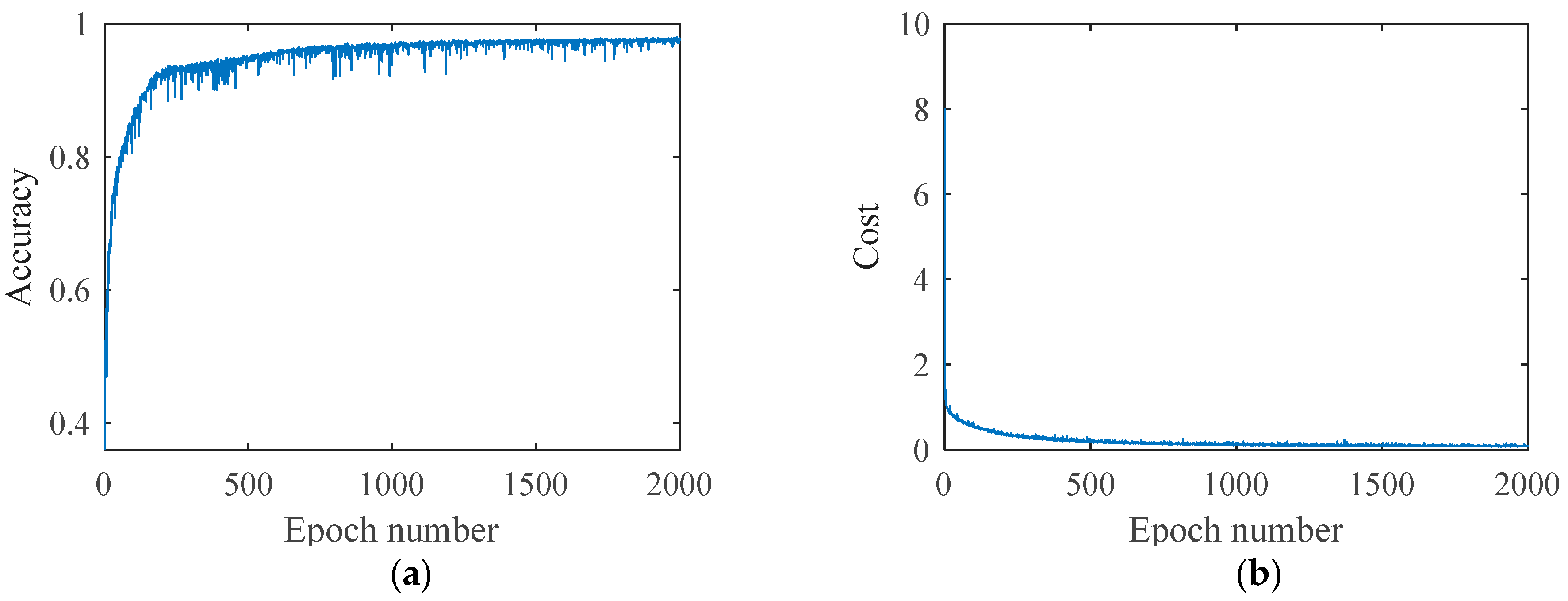
The learning rate is set to 0.00001; the Adam optimizer and early-stopping is adopted; and the batch size is set to 32. With the increase in epoch number, the prediction accuracy of the train set and the test set is gradually improved, and the experimental results show that the accuracy tends to be stable when the number of iterations reaches 2000.
In the experiment, accuracy and cost are used to describe the training process of the neural network model. The accuracy denotes the prediction accuracy of the pre-trained model for the test set. The accuracy can be expressed as
where
,
, and
denote the number of times that both the predicted result and the actual sample type are stripmap, scan, and spotlight, respectively;
denotes the number of samples in the test set.
The cost is an important parameter that determines how well a machine learning model performs for a given train set. Generally, the smaller the function value, the better the model fits. The cost can be expressed as
where
denotes the number of samples in the train set;
denotes the label value of the
i-th sample; and
denotes the value that the model classifier predicts for the
i-th sample.
4.1. Effect of SNR on Identification Accuracy
SNR is the primary factor that affects the identification accuracy. The signal will be submerged in the noise when the noise power is too high compared with the SAR signal power. In this subsection, simulation experiments are conducted on the identification accuracy for different receiving SNRs. In the following experiments, SNR is defined as the ratio of the average SAR signal power to the average noise power during jammer sampling. The specific parameter-setting ranges for the test set are shown in the following table (
Table 3). Besides, the other parameters are kept the same as in the process of the train set production, and 108 samples are generated for each operating mode, respectively.
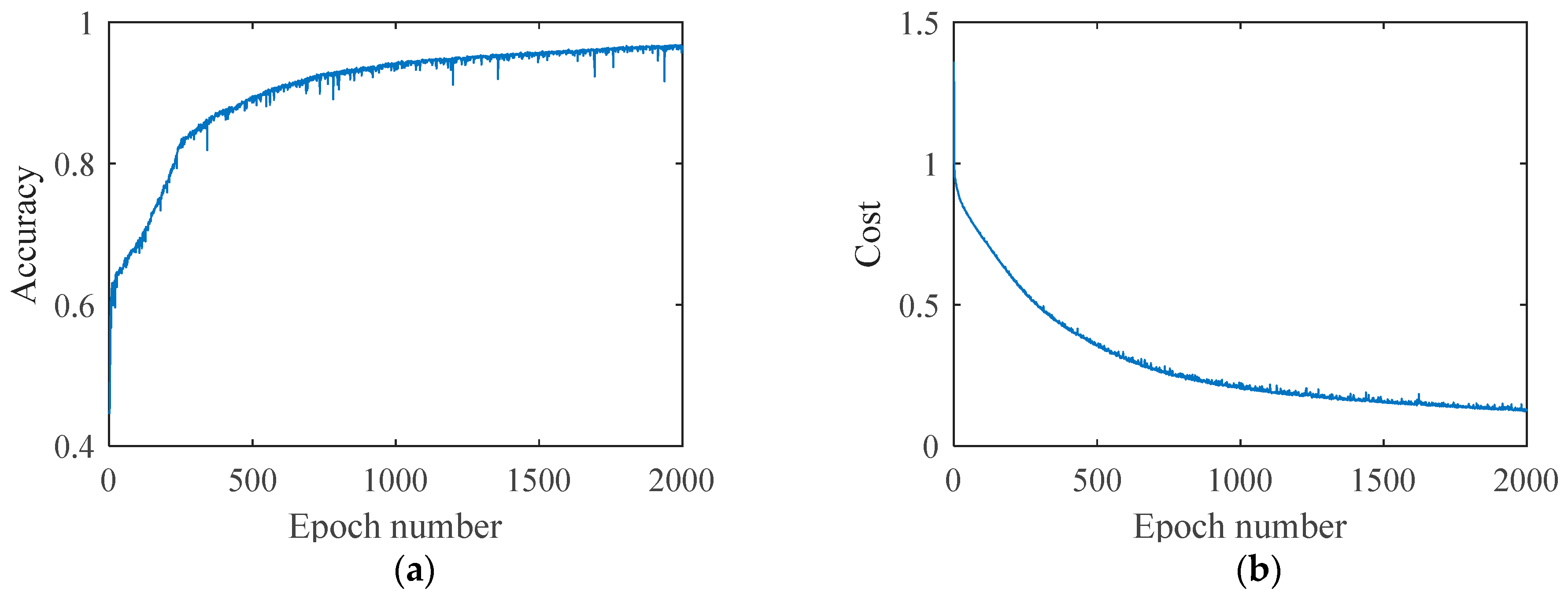
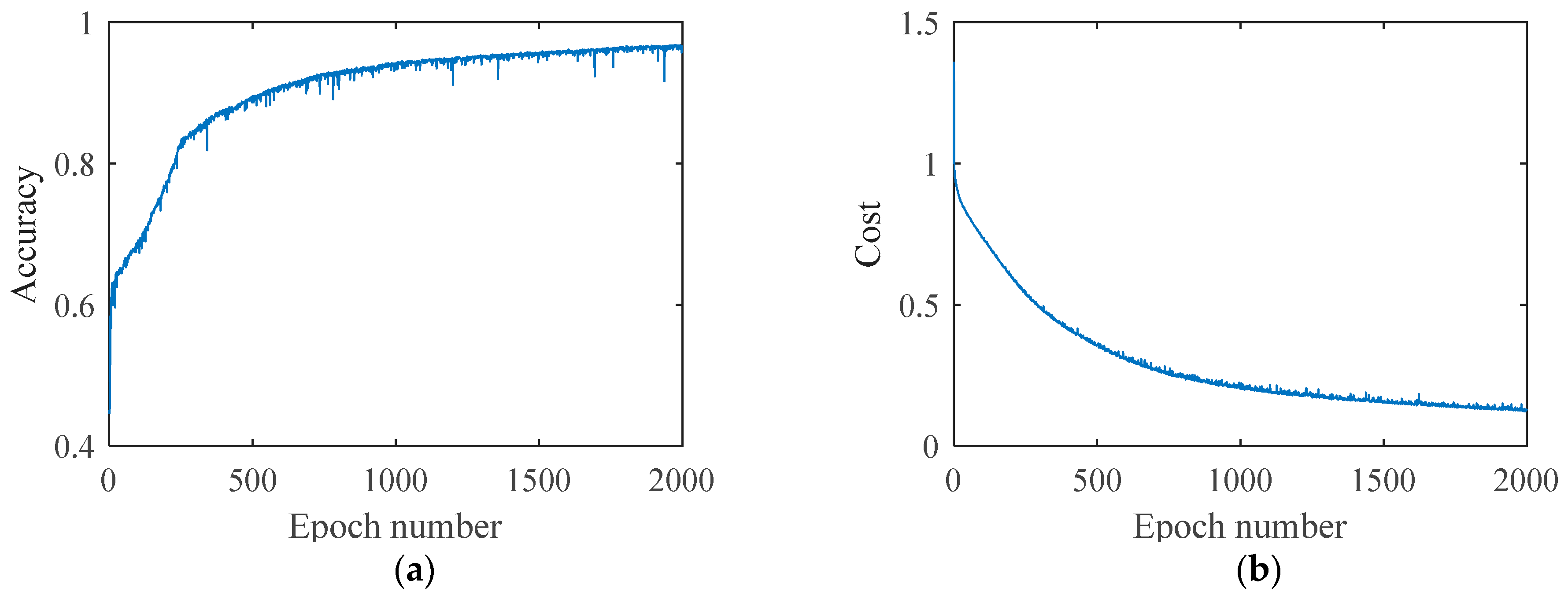
In the experiment, the train set containing 10,800 samples and the test set containing 324 samples were input into the network, where the train set and the test set have the same number of samples for stripmap, scan, and spotlight. When the number of the training epochs is set to 2000, the accuracy for the train set and the loss curve are shown in the figure below (
Figure 10).
In the process of producing the test set, the SNR is set from −8 dB to 12 dB and the step-size is set to 4 dB. The prediction accuracy of the pre-trained network for each test set is shown in the table below (
Table 4).
As shown in the table above, the average prediction accuracy rate can reach 85% when the SNR is set above 0 dB. However, the identification accuracy apparently decreases with the reduction of SNR, especially when the SNR is less than 0 dB.
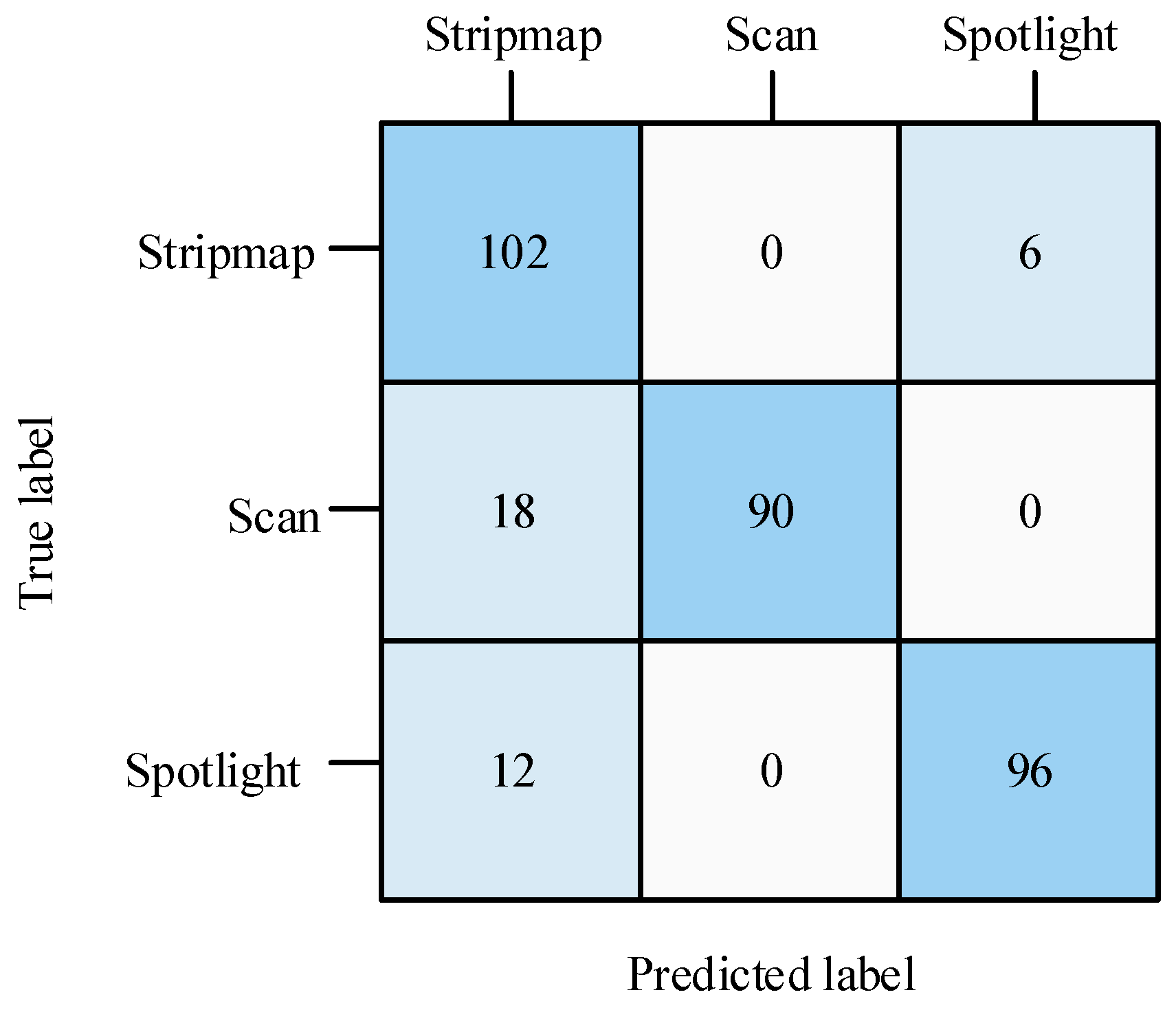
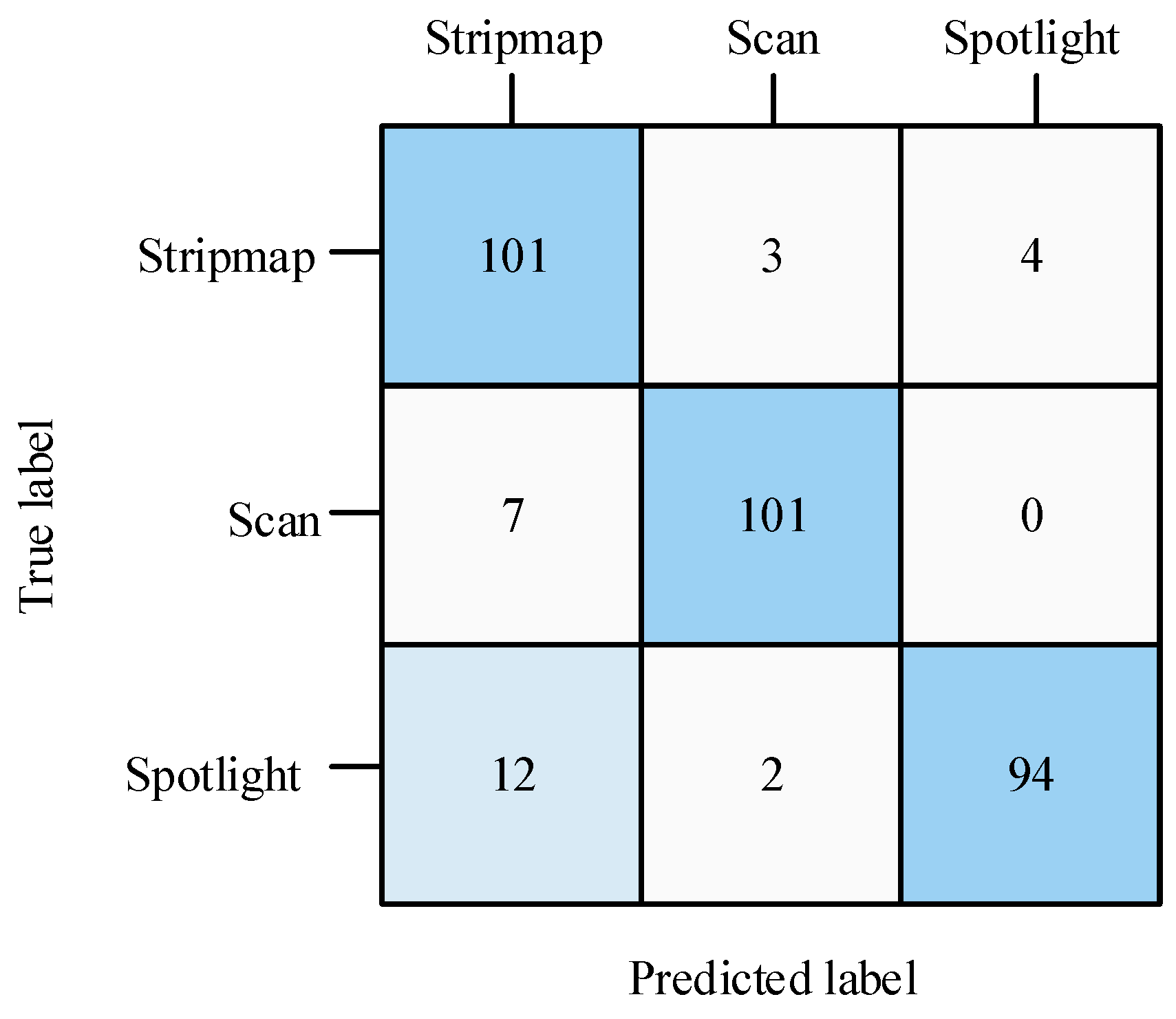
When the SNR is set to 12 dB, the classification confusion matrix of the method proposed in this paper is shown in the figure below (
Figure 11).
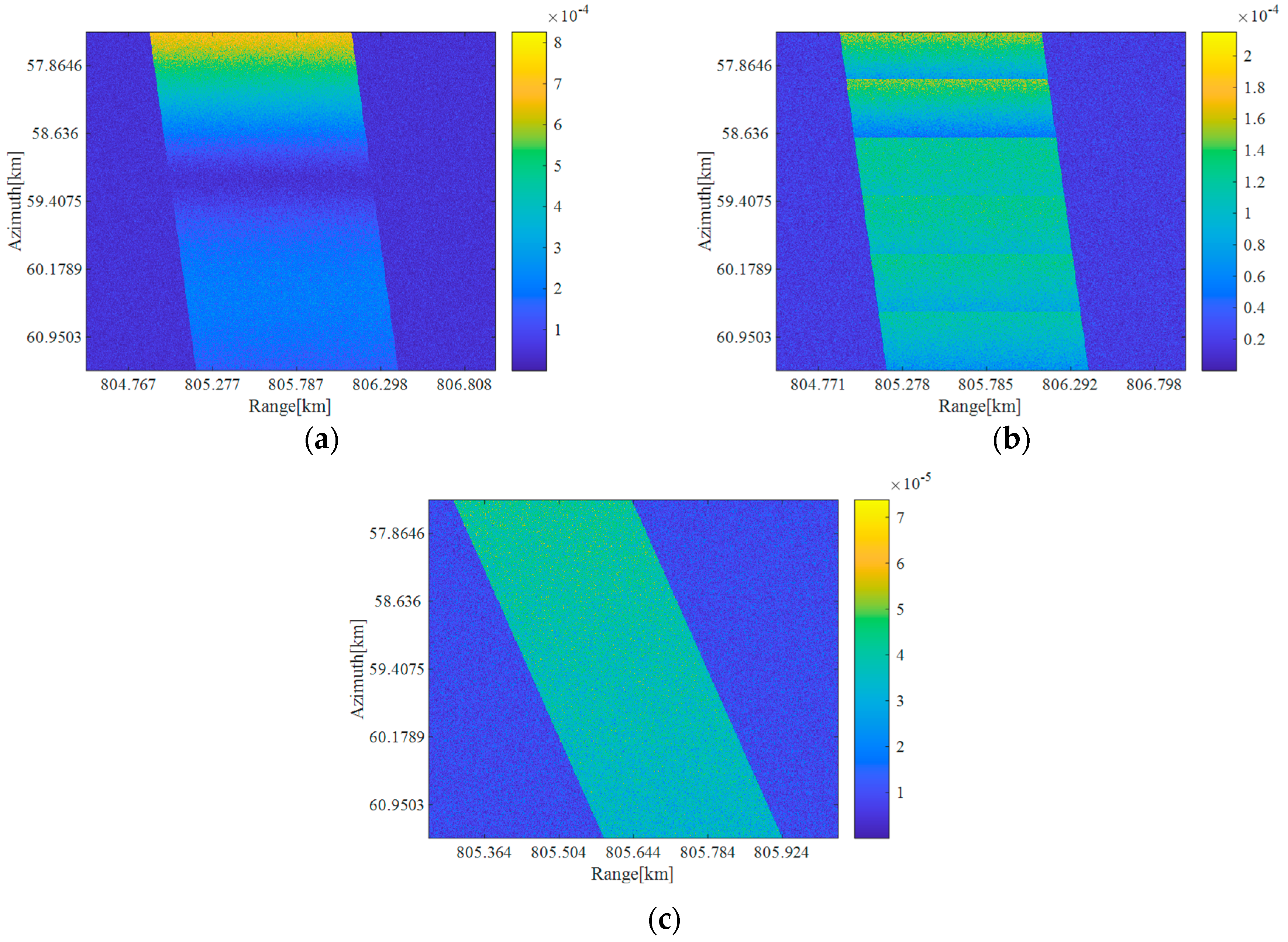
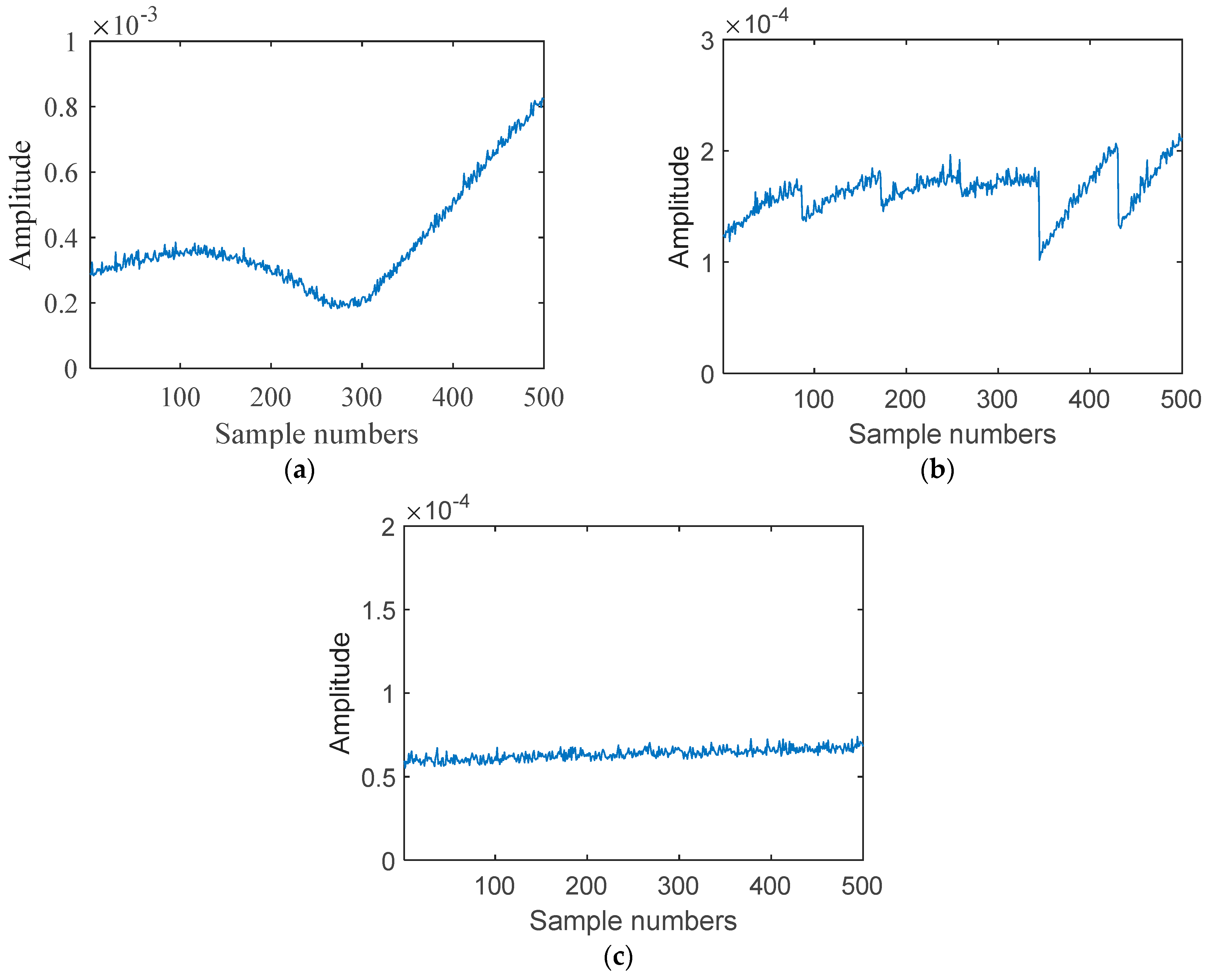
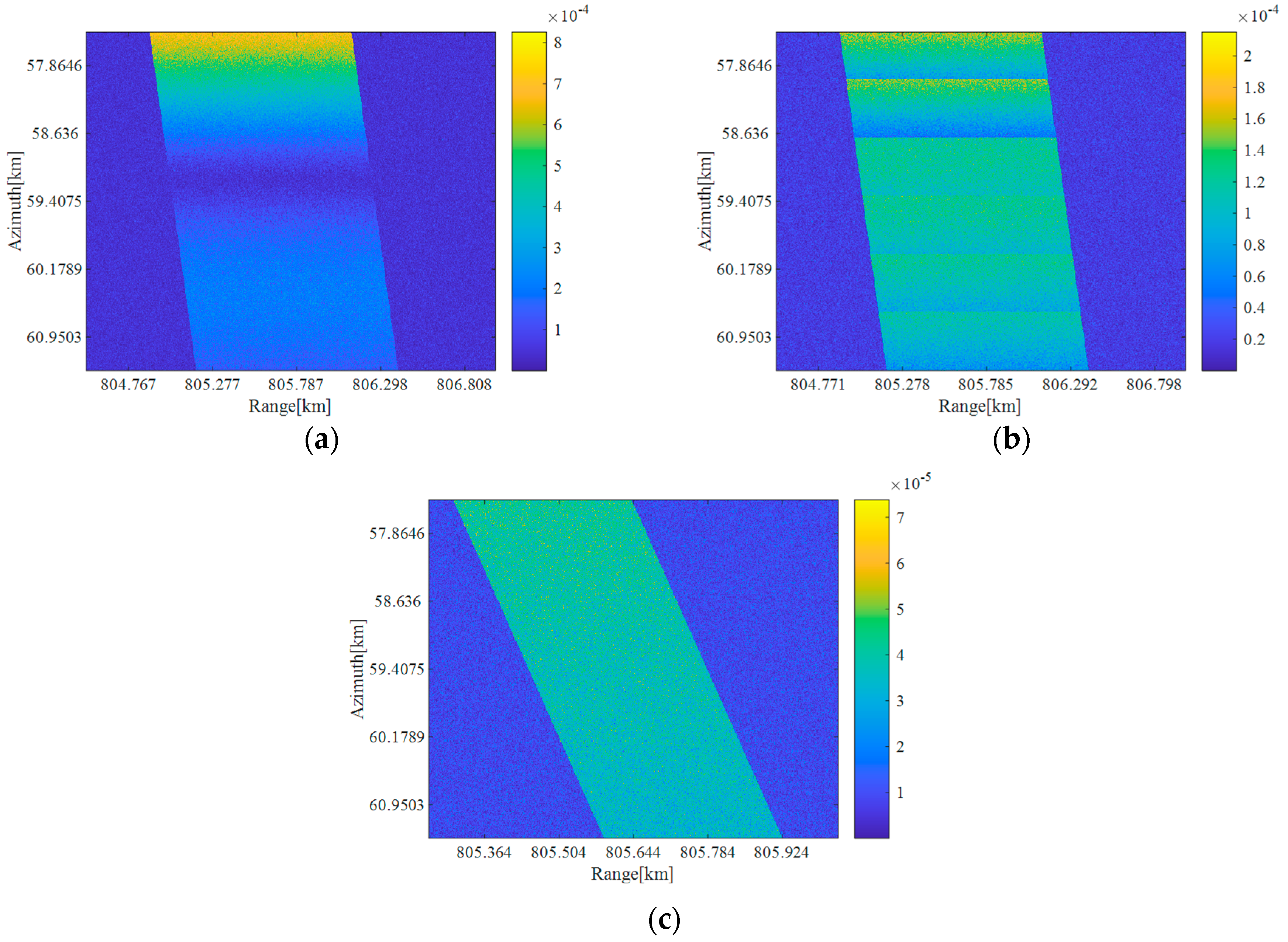
As shown in the above figure, stripmap samples are easier to identify than scan or spotlight samples. At the same time, scan and spotlight samples are more likely to be misidentified as stripmap samples. Two sample cases of misidentification are shown in the figure below (
Figure 12). We found that when the signal power is too low, which is usually due to the intercepted signal being in the low-gain area of the antenna pattern, the difficulty of identification will be increased. In this regard, we can deploy several jammers at different locations (generally along the azimuth) to ensure that the intercepted signal power is high enough.
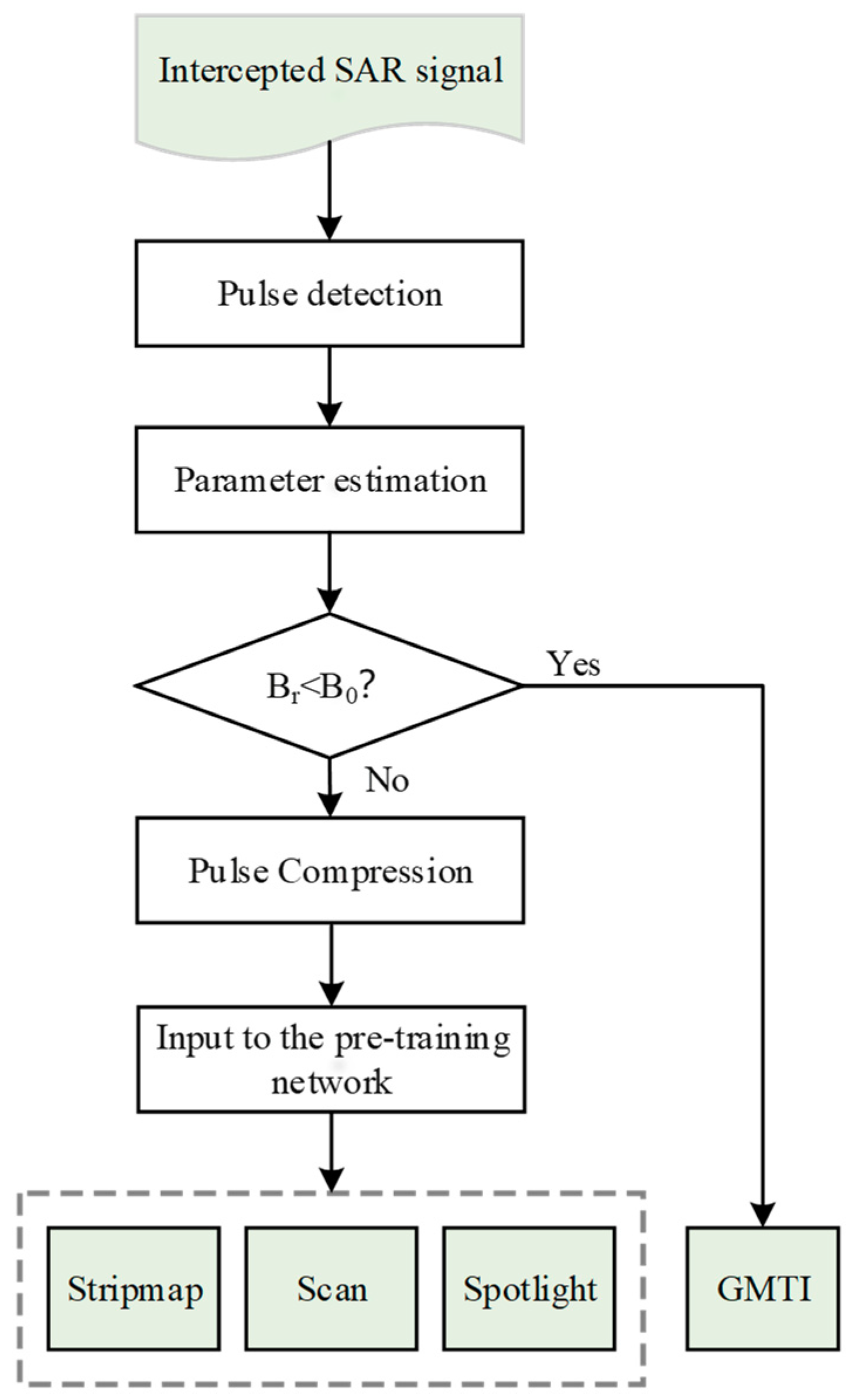
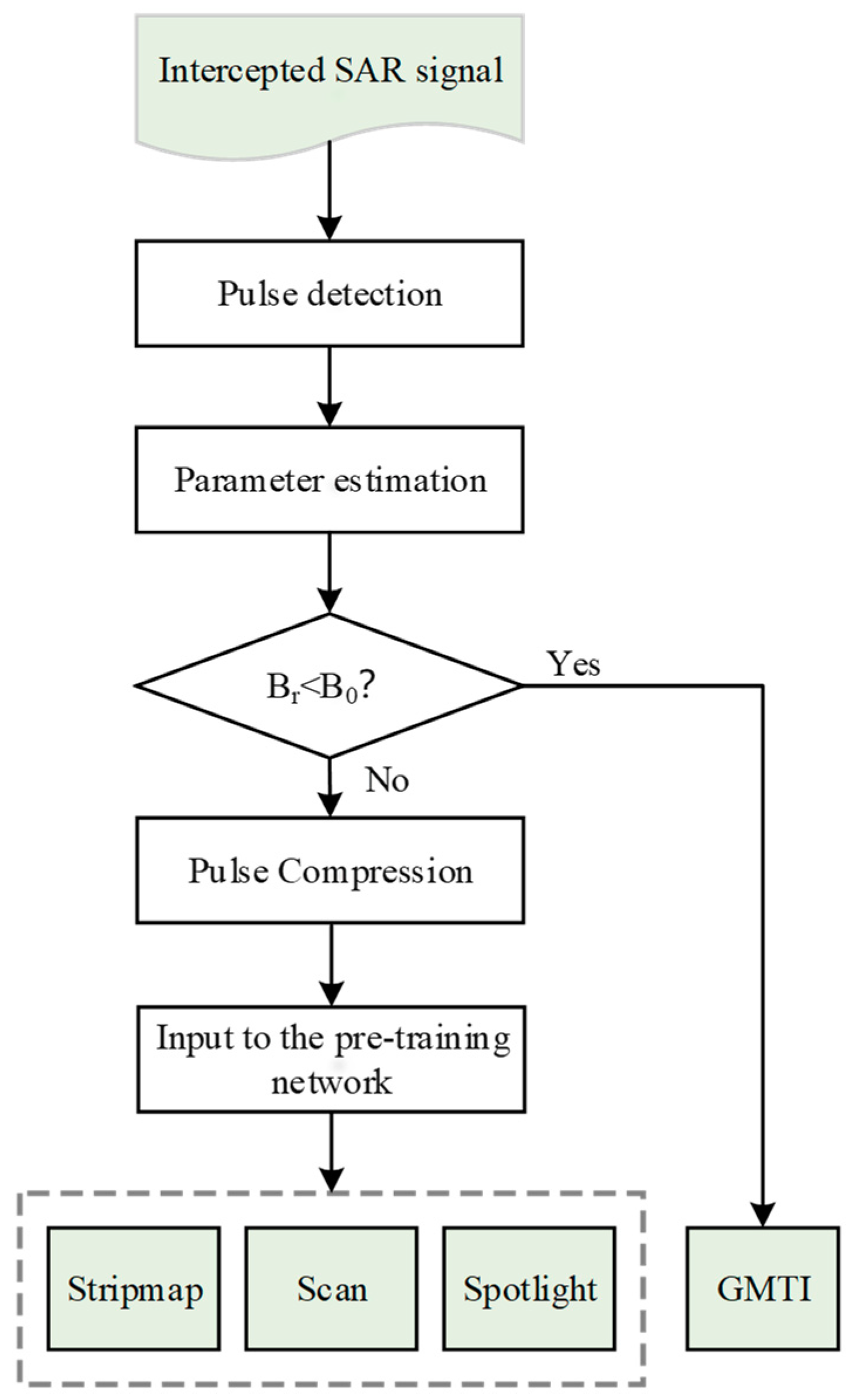
Since the proposed method is based on sidelobe reconnaissance, the signal experiences sidelobe decay. In order to compensate for the case of low SNR, we further consider using a matching filter to enhance the peak signal-to-noise ratio (PSNR), and the compressed signals are used to make a mode identification. To this end, the fractional Fourier transform (FrFT) algorithm is employed to obtain the required parameters. The detailed process to obtain the filter is as follows.
First, pulse detection is performed and then some intra-pulse parameters such as pulse duration and pulse repetition interval (PRI) can be estimated [
43]. Then, we extract the first several pulses intercepted and estimate the frequency-modulated rate by the FrFT algorithm so that pulse compression can be performed.
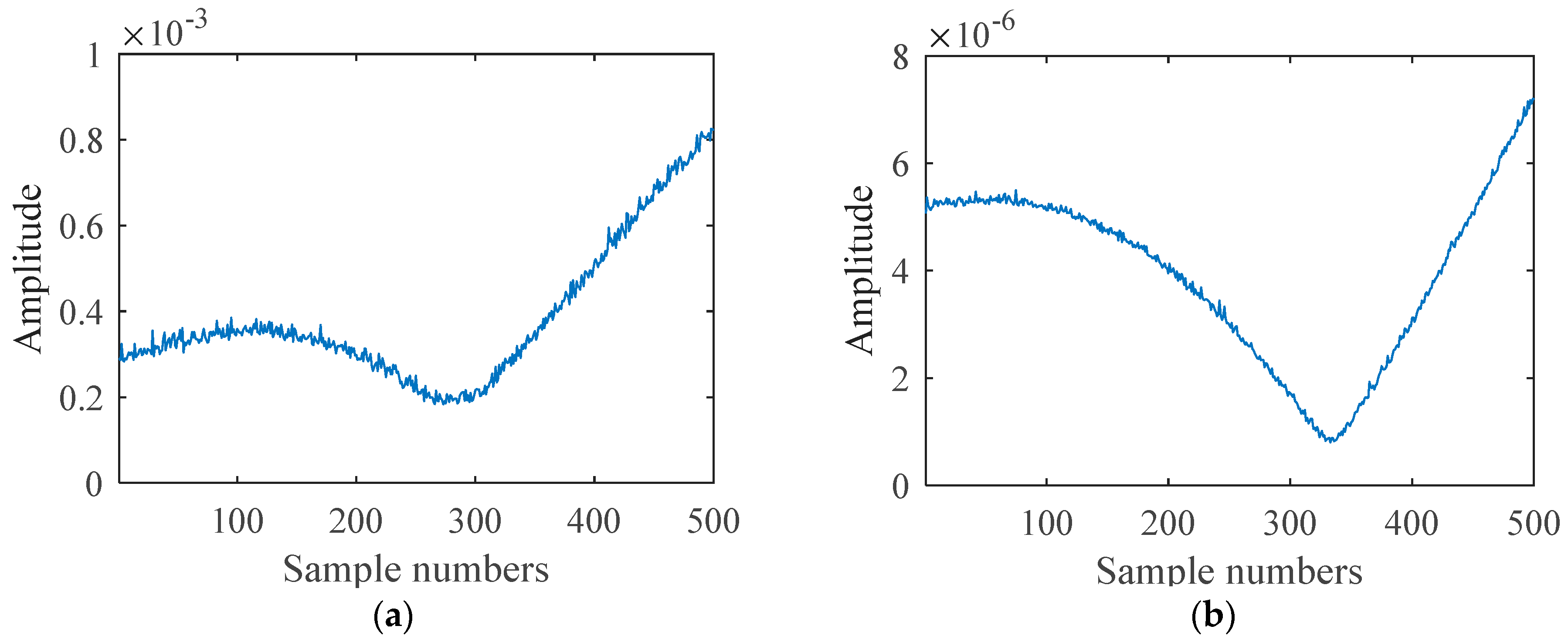
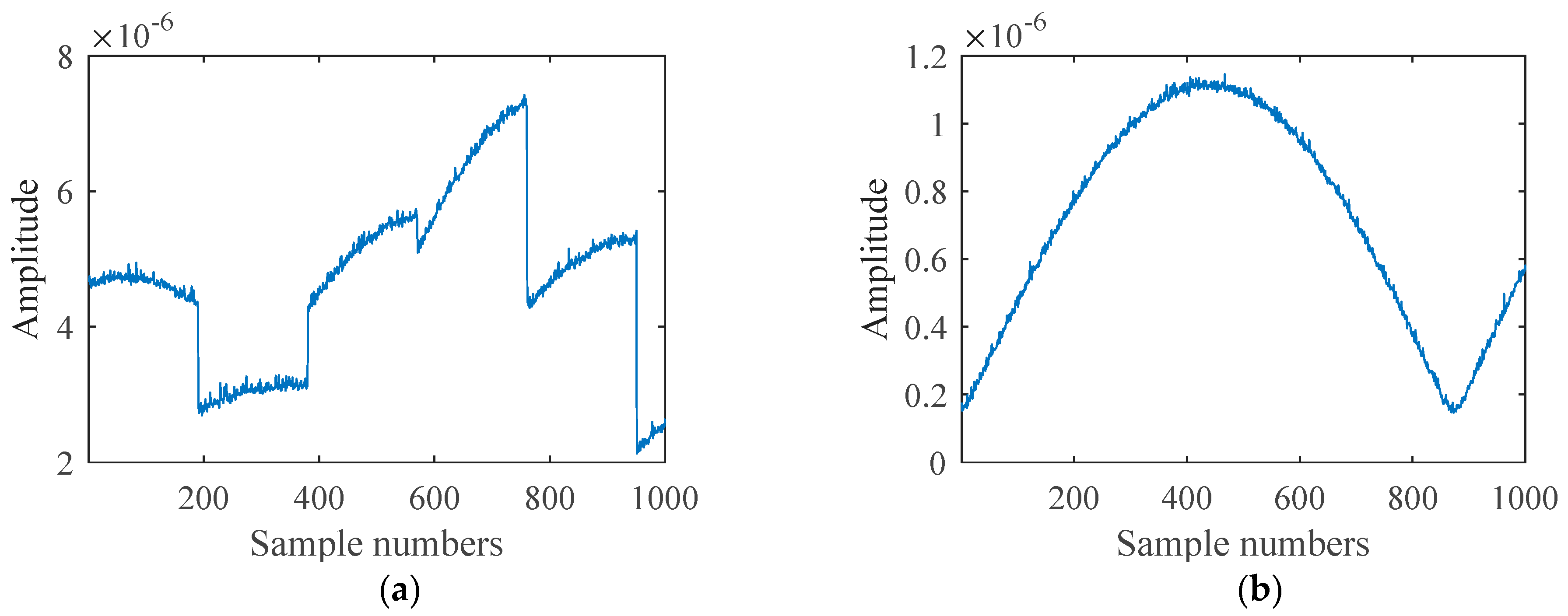
The amplitude of a section of intercepted signal before and after pulse compression is shown in the figure below (
Figure 13).
The data set with pulse compression is trained and predicted with other settings being unchanged. When the number of epochs is set to 2000, the accuracy for the train set and the loss curve are shown in the figure below (
Figure 14).
Clearly, the network with pulse compression obtains an improved convergence rate which results from a higher SNR. In the process of producing the test set, the SNR is set from −8 dB to 12 dB and the step-size is set to 4 dB. The prediction accuracy of the pre-trained network with pulse compression as well as the method proposed in [
32] for each test set is shown in the table below (
Table 5).
As shown in the table above, when the SNR is lower than 12 dB and higher than −8 dB, the identification accuracy rate remains at about 90% and will not deteriorate rapidly with the decrease in SNR. Therefore, the method based on the FrFT estimation algorithm can cope with the situation of poor SNR.
A Gated Recurrent Unit (GRU) neural network, an improved recurrent neural network, is employed in [
32]. The experimental results show that the accuracy of the proposed method is slightly higher than the method employed in [
32] when the SNR is higher than 0 dB; but, the accuracy of the method with pulse compression is much higher than the method employed in [
32].
When the SNR is set to 12 dB, the classification confusion matrix of the method with pulse compression is shown in the figure below (
Figure 15).
As shown in the above figure, compared with
Figure 11, the identification accuracy has been improved. Similarly, scan and spotlight samples are more likely to be misidentified as stripmap samples.
4.2. Effect of the Jammer Position
Considering that the relative position of the jammer is unpredictable and uncontrollable when intercepting SAR signals, this subsection will verify the robustness of this method to the uncertainty of the relative position of the jammer.
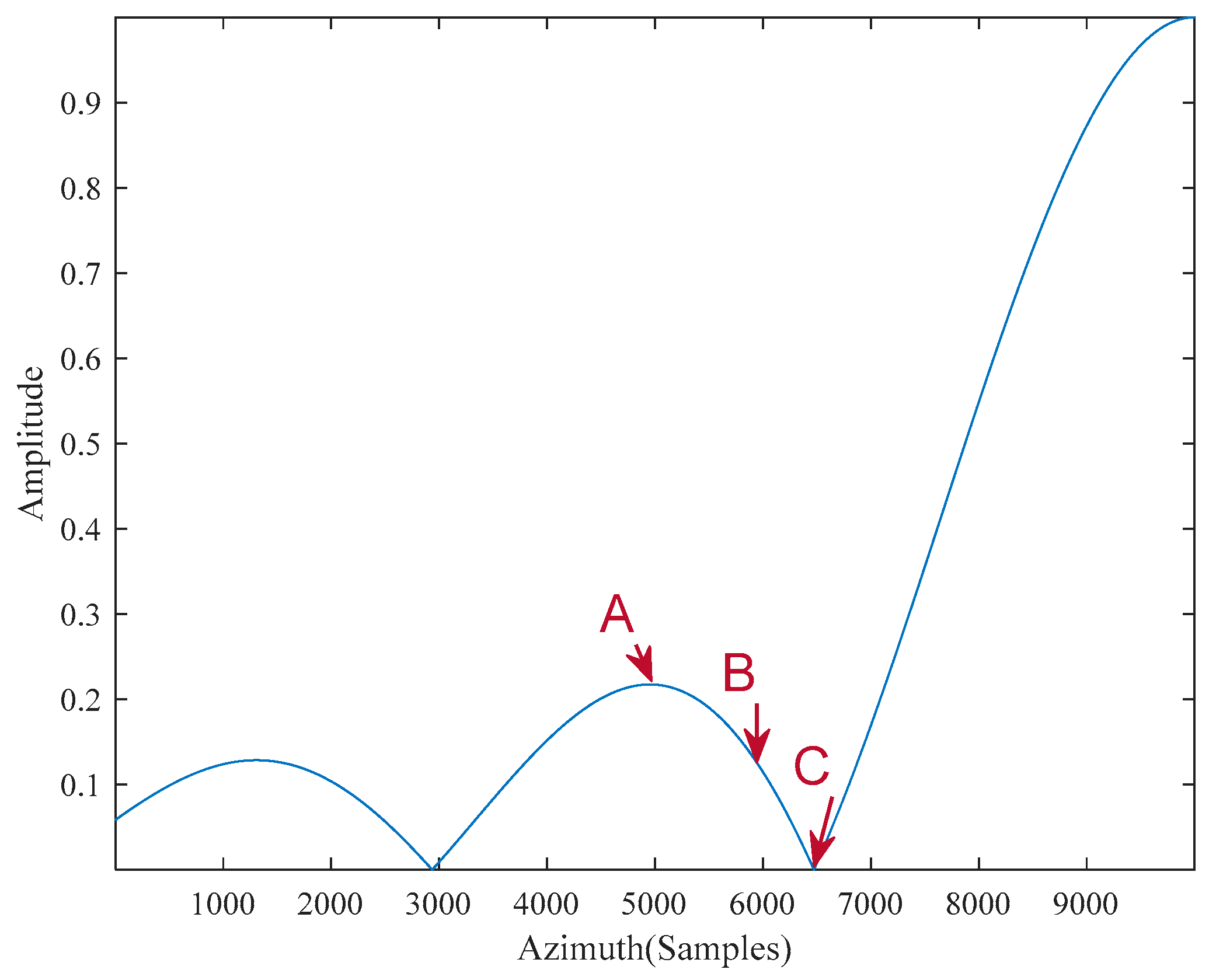
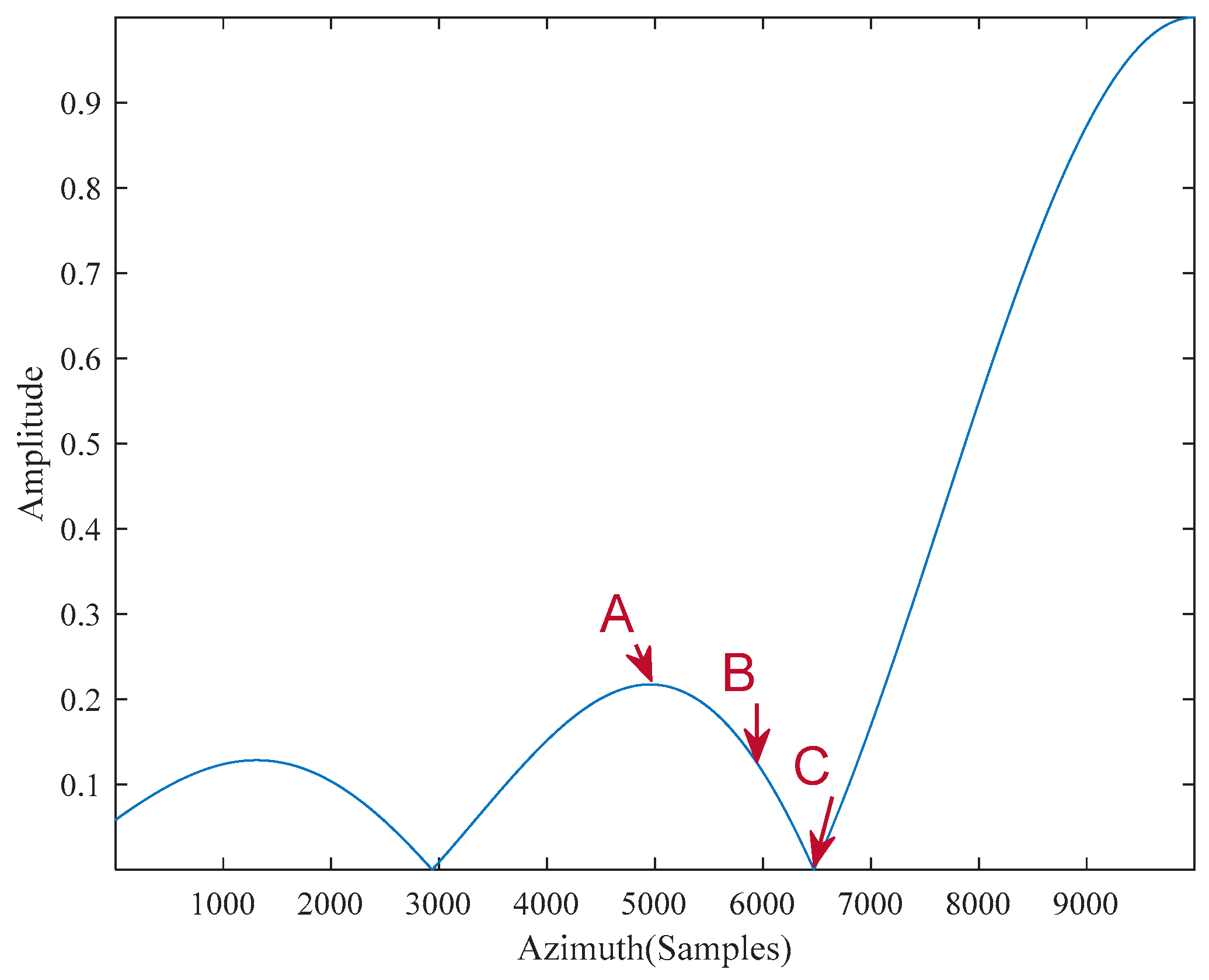
A part of the antenna pattern in azimuth for the point target is shown in the figure below (
Figure 16). In the experiment, three typical jammer positions are selected along the azimuth as marked in the figure below (
Figure 16). Specifically, among them, one is placed at the peak of the first sidelobe, one at the trough between the main lobe and the first sidelobe, and one at the midpoint between the former two.
Three jammers are placed at A, B, and C, respectively, as shown in the figure above, the SNR is set to 12 dB, and other settings are consistent with the experiment in
Section 4.1. The training results are shown in the following table (
Table 6).
Apparently, when the jammer is deployed at the above three typical positions, the identification accuracy rate can maintain itself above 86% and the rate can reach above 90% when pulse compression is employed. Hence, the robustness of this method to the jammer position is verified experimentally.
4.3. Effect of the Number of the Accumulated Pulses
The number of accumulated pulses required is closely related to the identification speed. As the number of accumulated pulses increases, the identification accuracy will increase, while the time required for identification will also increase. If an acceptable identification accuracy can be obtained with fewer pulses, the reconnaissance system for the SAR operating mode will be much more efficient. Therefore, this subsection discusses the relationship between the number of accumulated pulses and identification accuracy, so as to obtain an empirical optimal accumulated pulse number, which can provide a reference for future engineering application.
The following experiments set the number of the intercepted pulses from 100 to 1000, respectively, and the SNR is set to 12 dB while other experimental settings are consistent with
Section 4.1. The experimental results are shown in the table below (
Table 7).
The experimental results show that without pulse compression, the identification accuracy will become less than 85% when the accumulated pulse number is reduced to 500. Furthermore, with the reduction of the accumulated pulse number, the accuracy will decrease sharply. With pulse compression employed, the accuracy can still remain above 85% when the pulse number is reduced to 400.
In order to balance the identification accuracy and the speed, it is appropriate to set the accumulated pulse number to 600 without pulse compression. Besides, the number can be set to 400 with pulse compression employed.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}