
Deep Learning-Based Landslide Recognition Incorporating Deformation Characteristics

 ,
, 
Abstract
1. Introduction
2. Study Area and Data
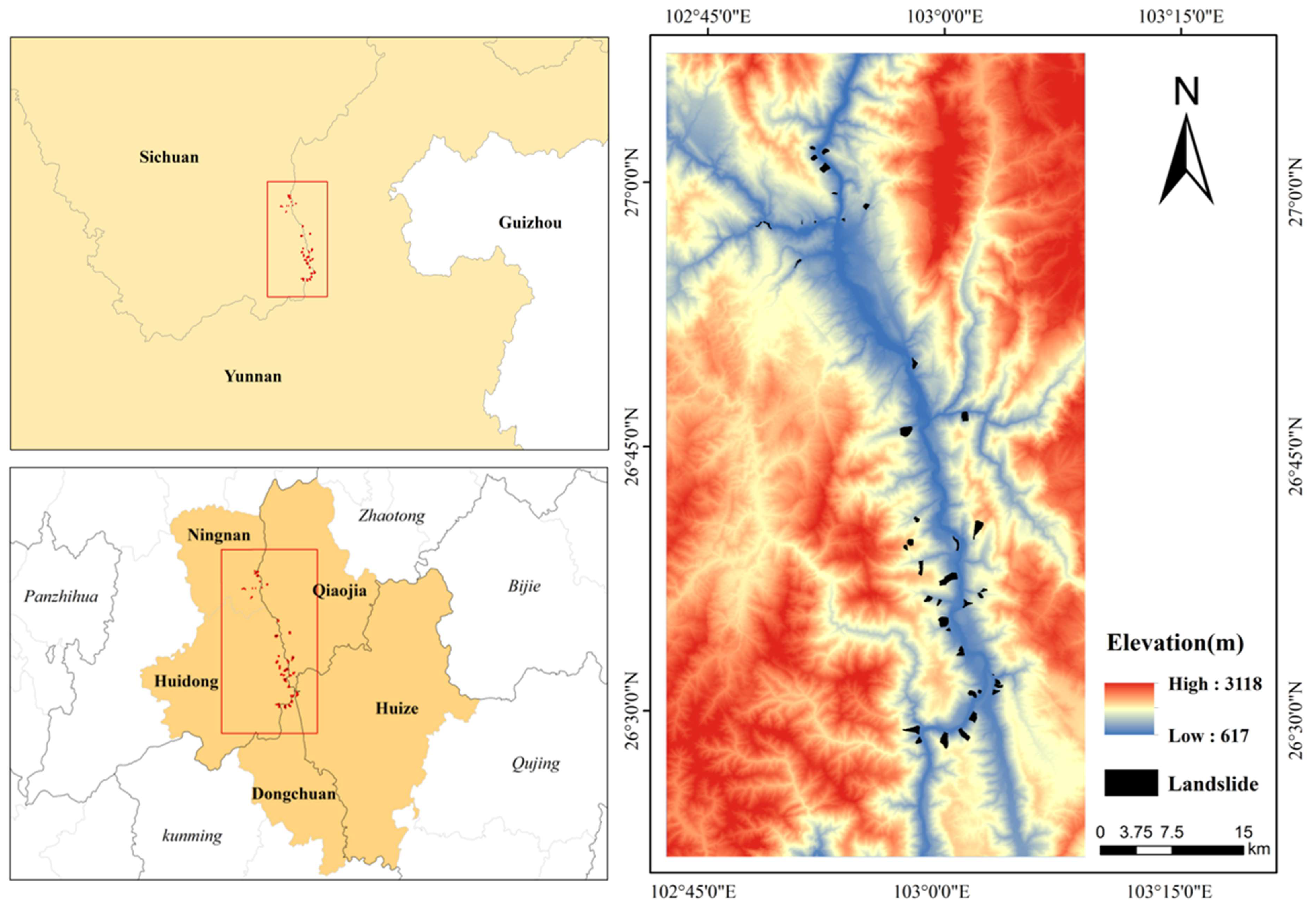
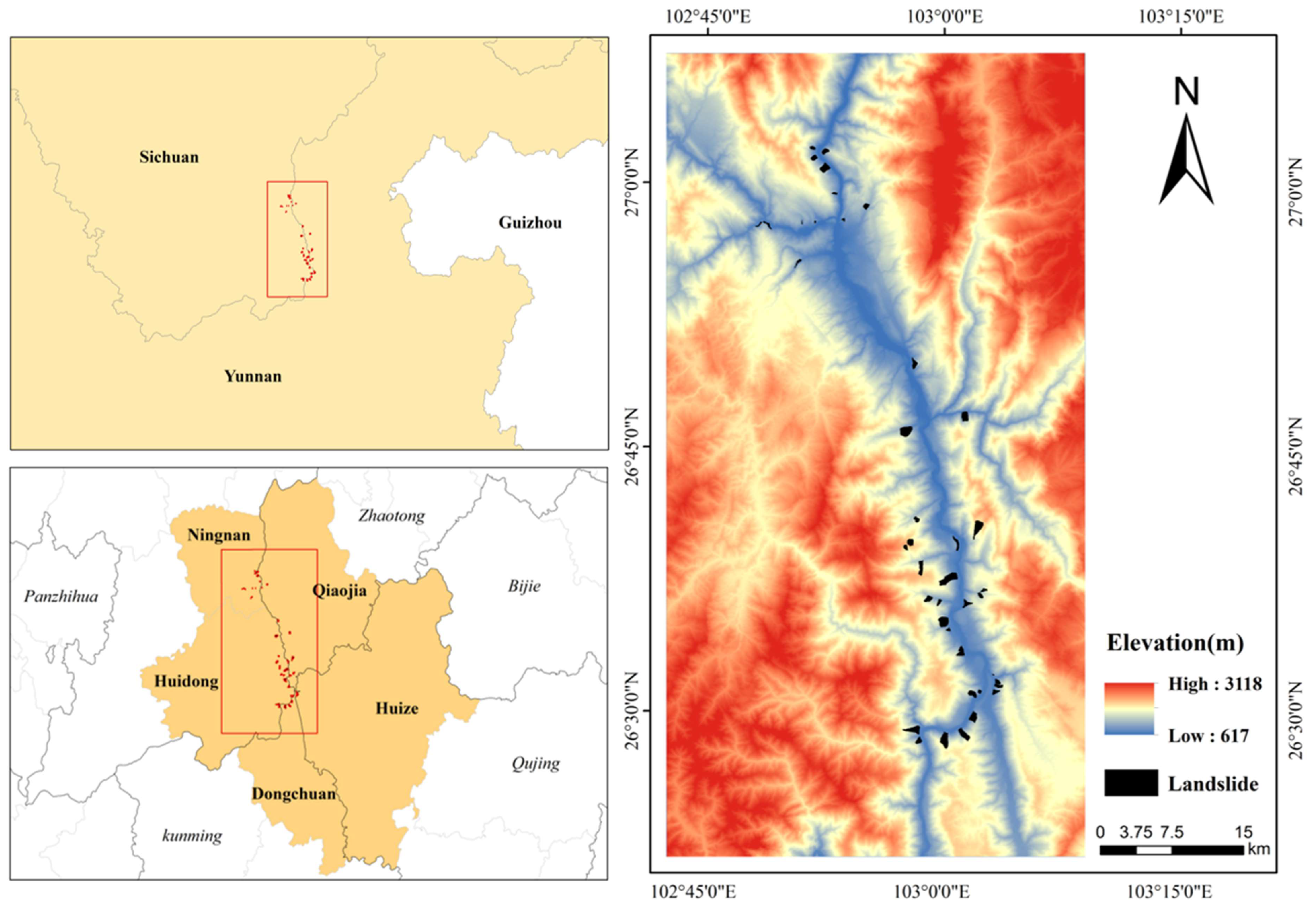
2.1. Study Area
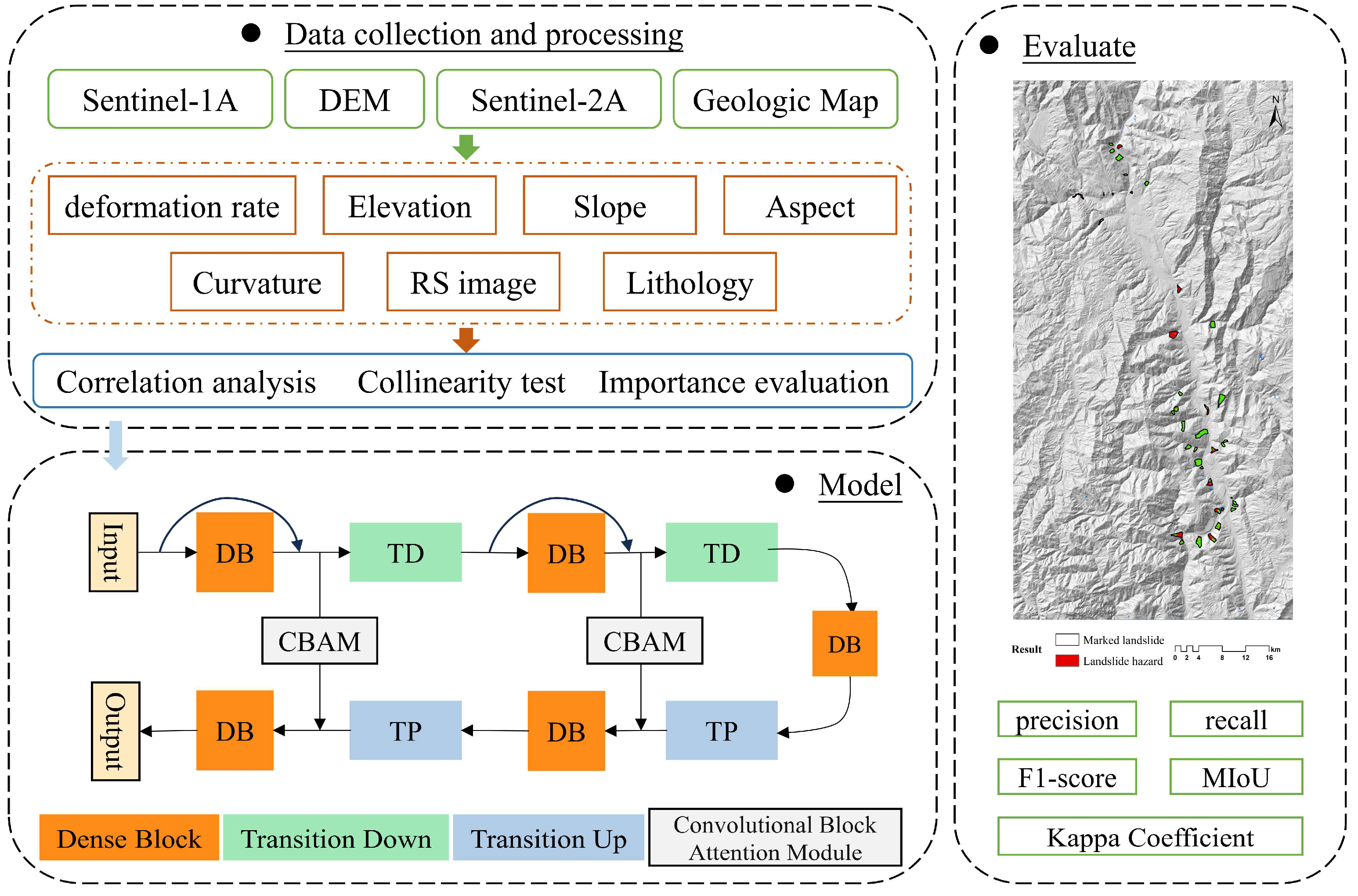
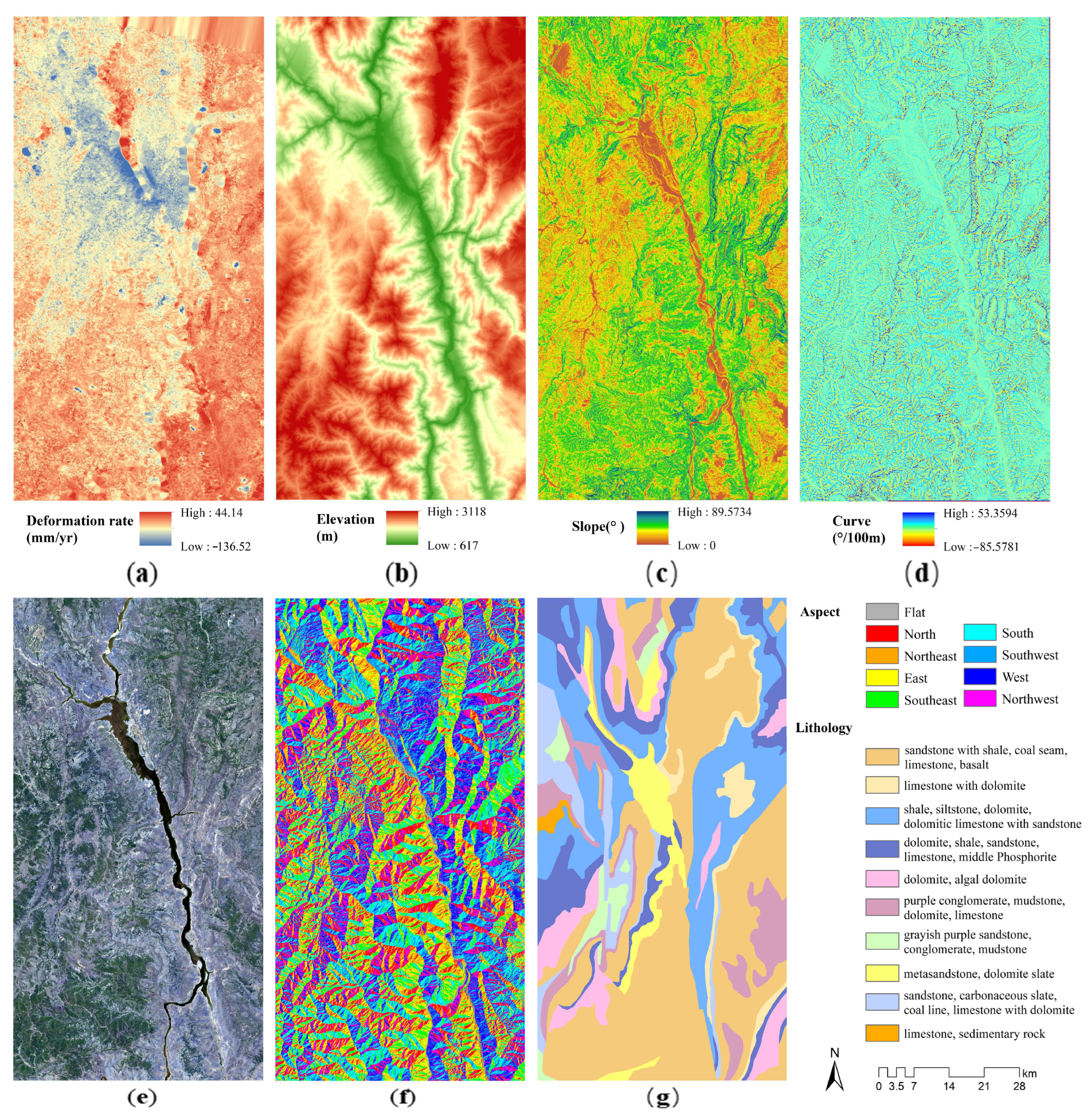
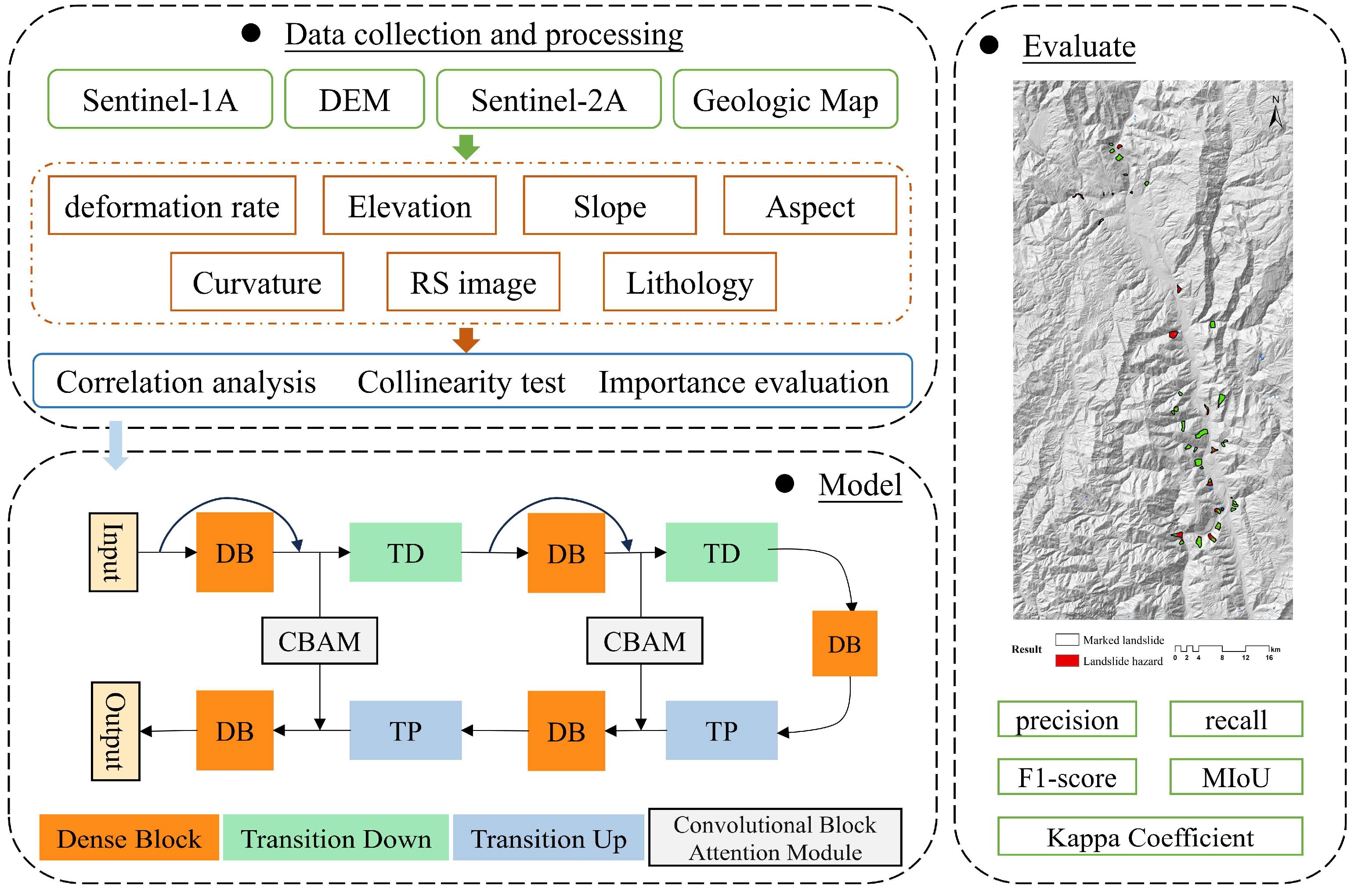
2.2. Data and Preprocessing
3. Method
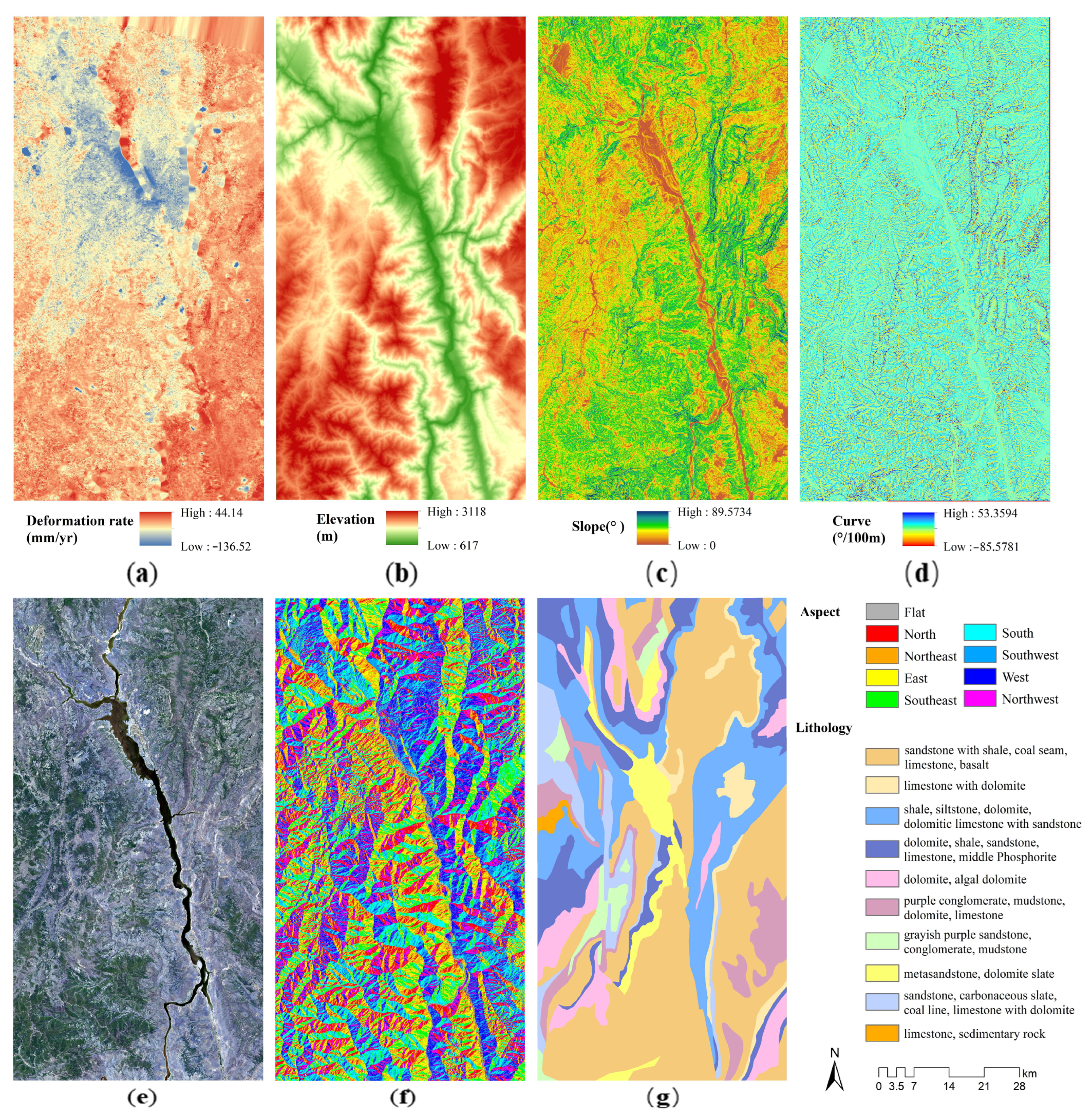
3.1. Selection of LCFs
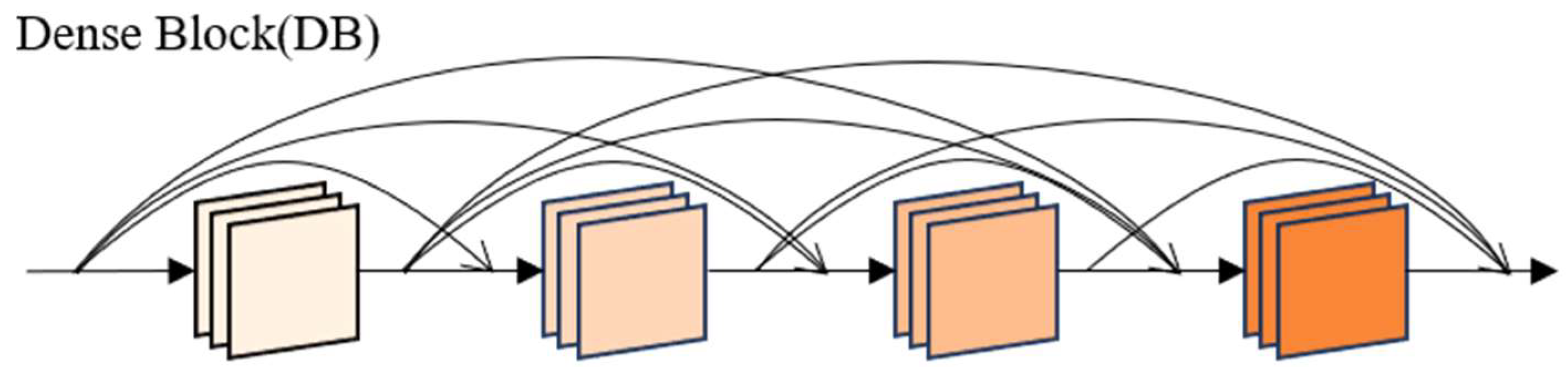
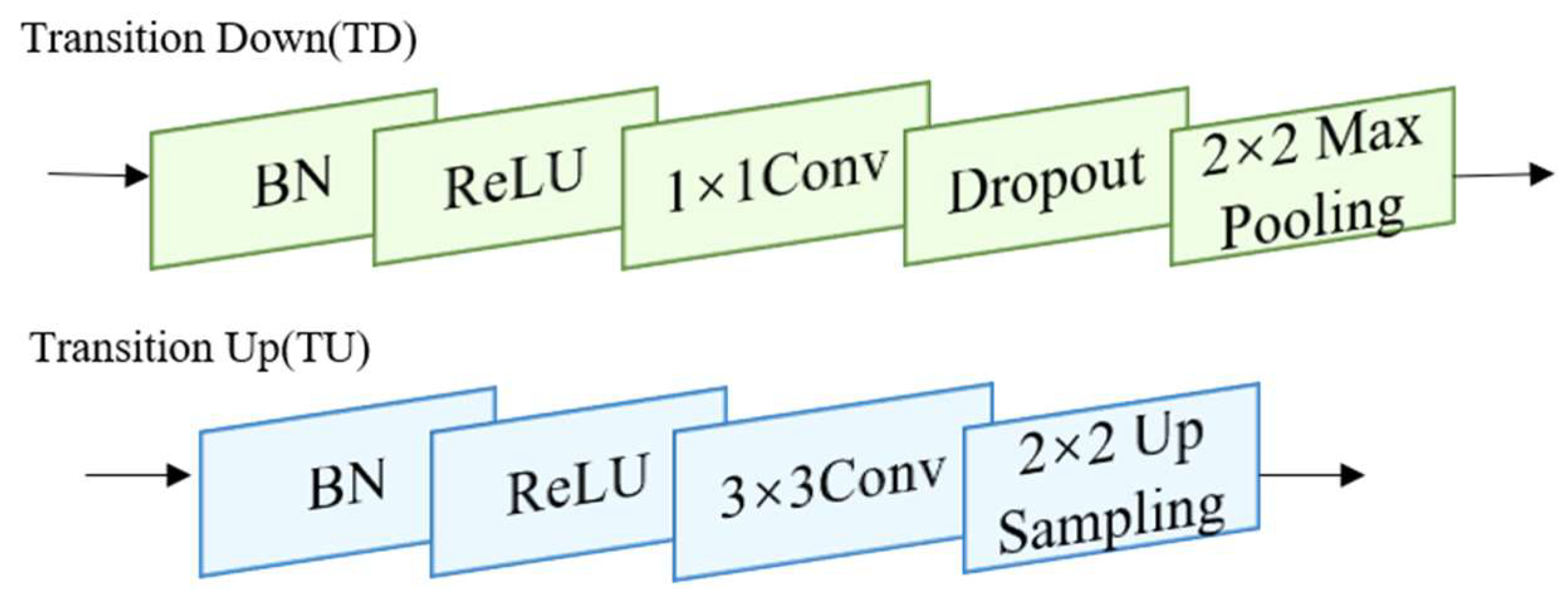
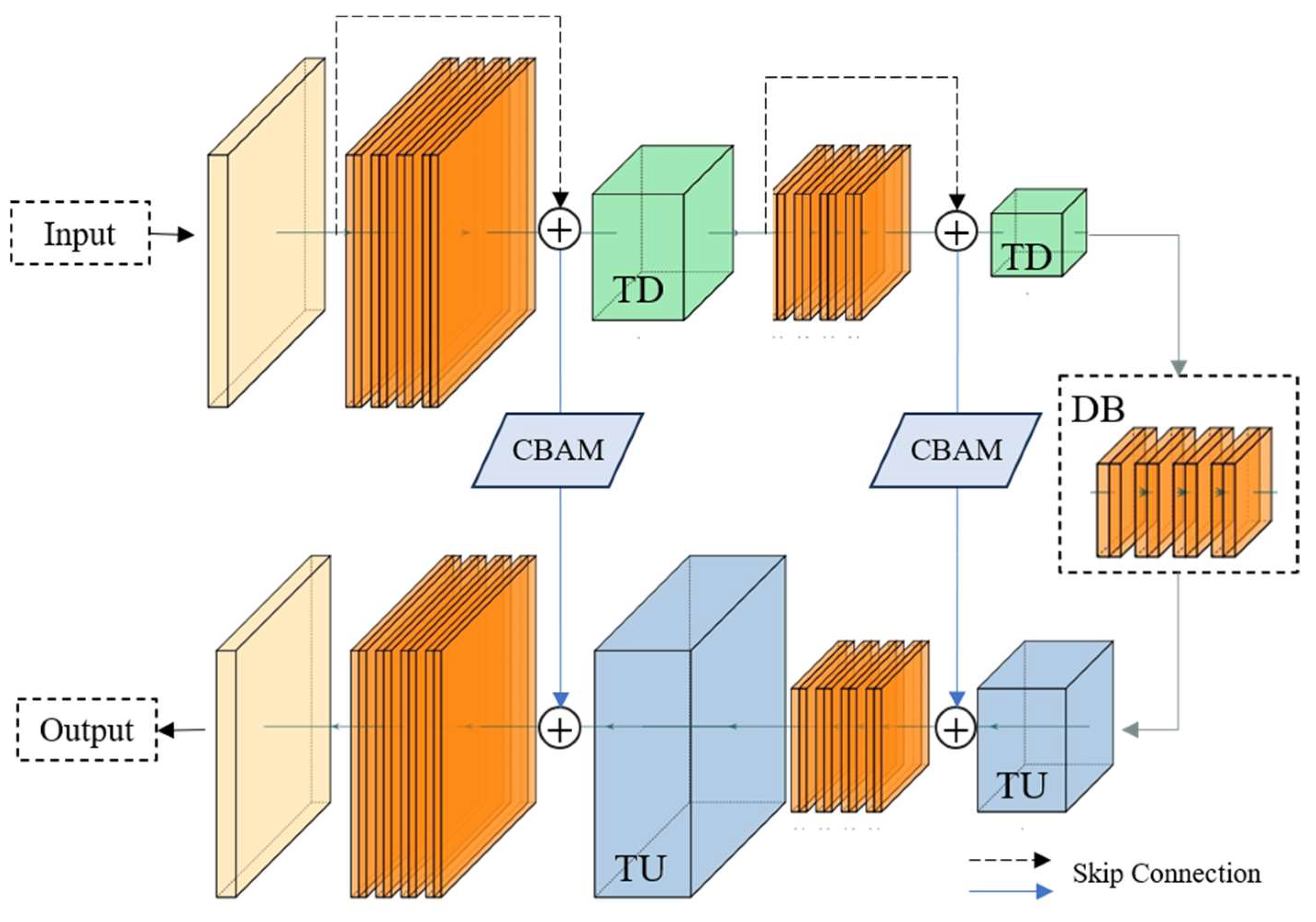
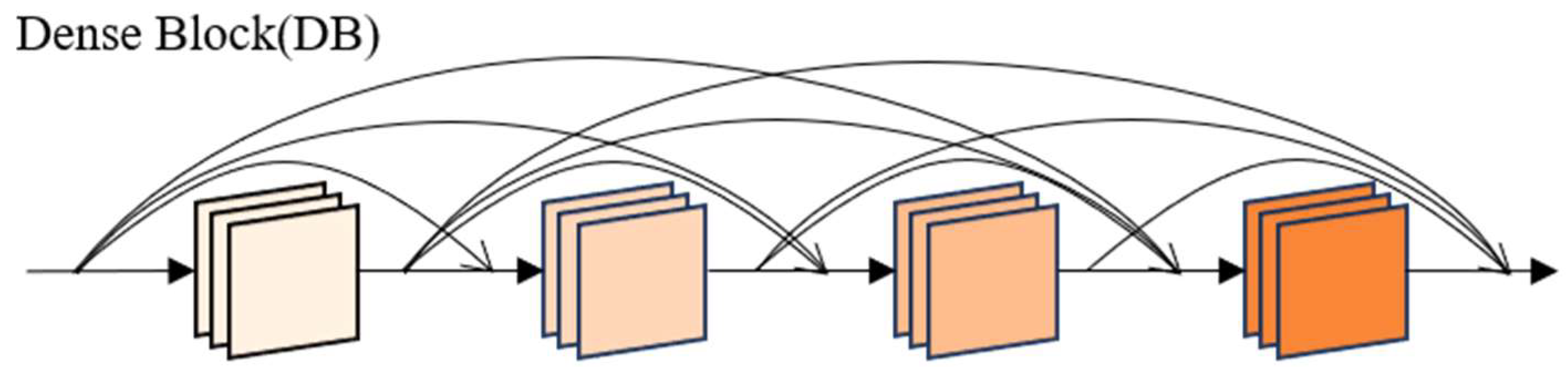
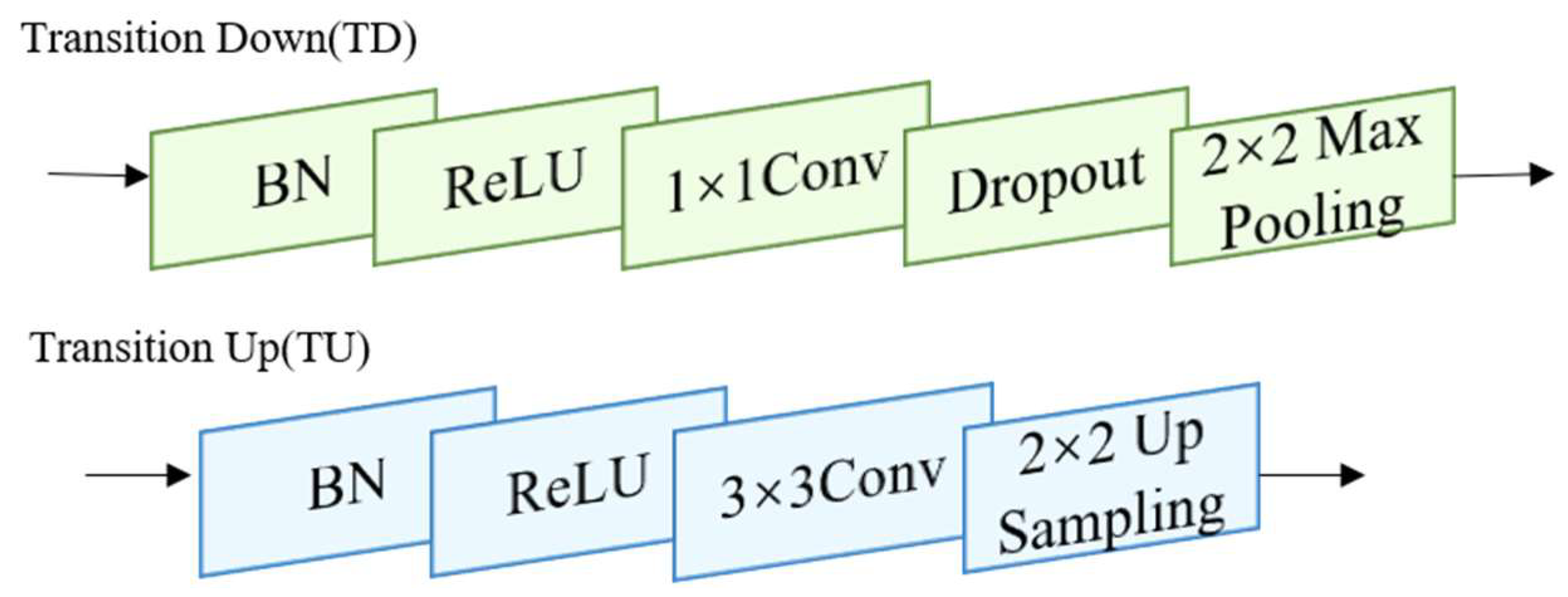
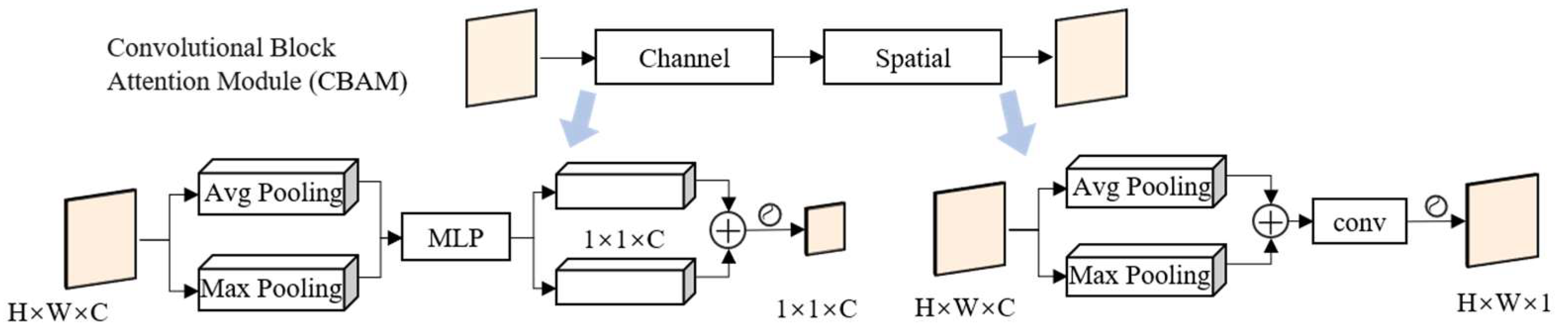
3.2. FCADenseNet
3.3. Evaluation Metrics
3.4. Experiment Setting
4. Results and Analysis
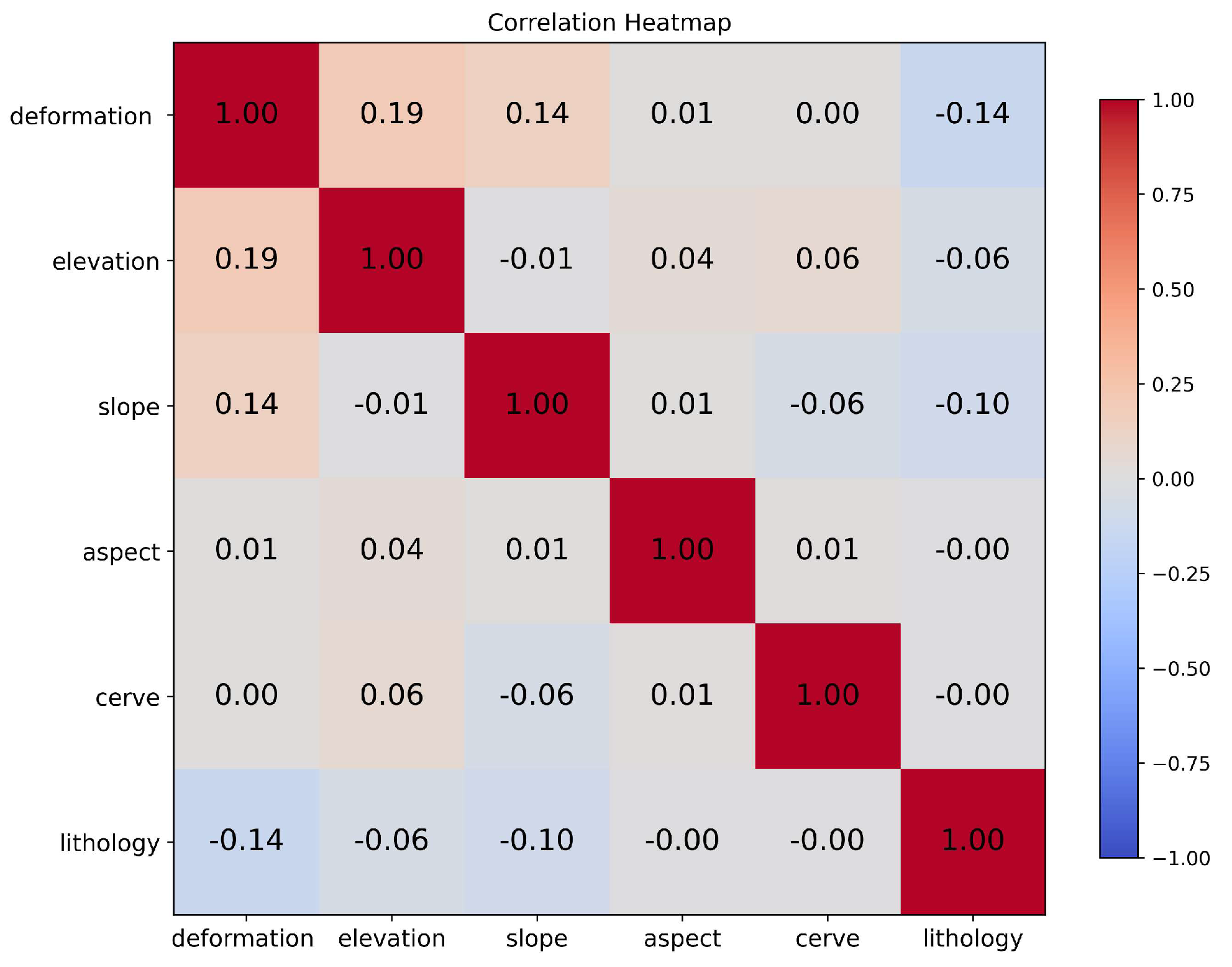
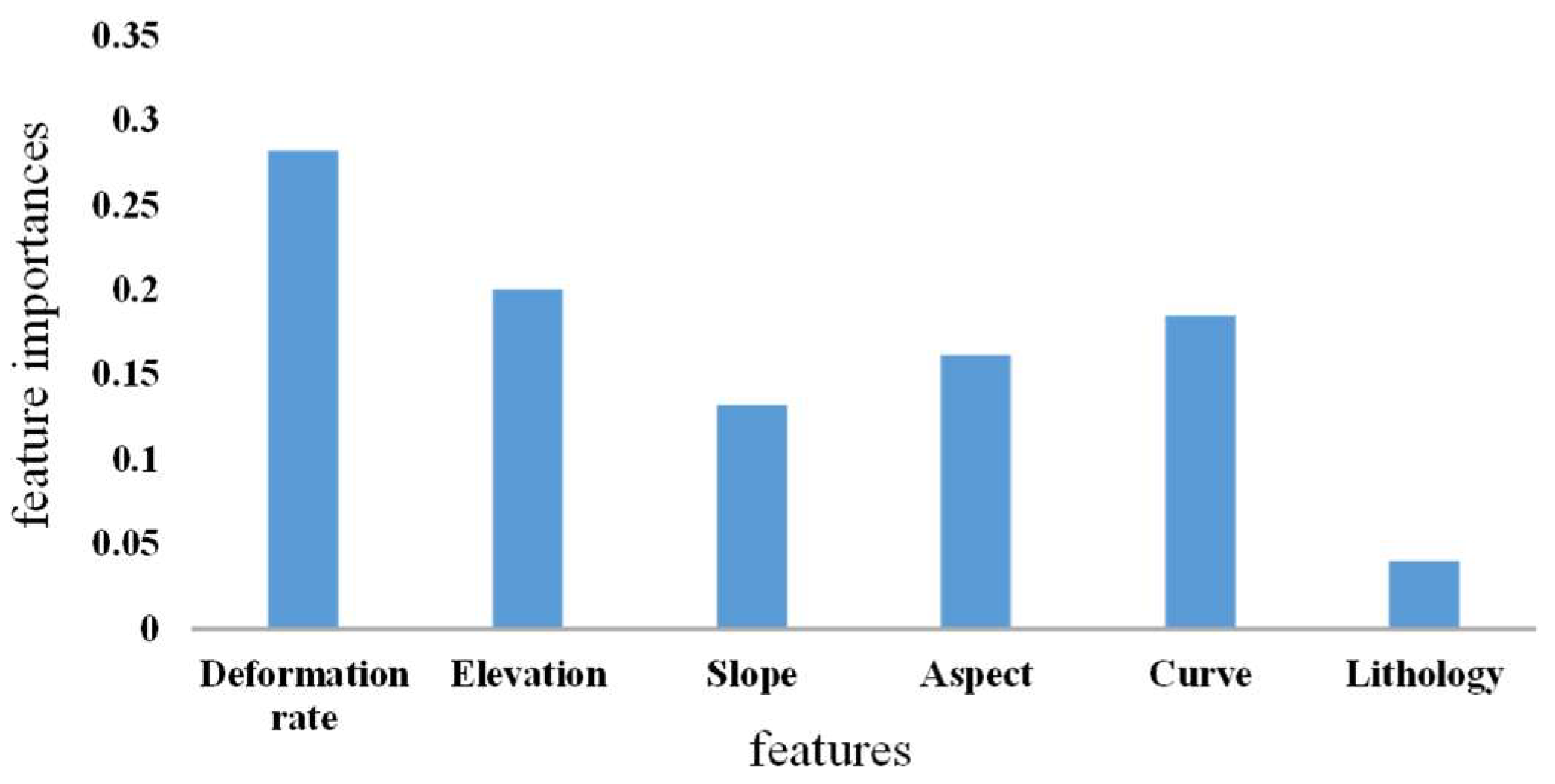
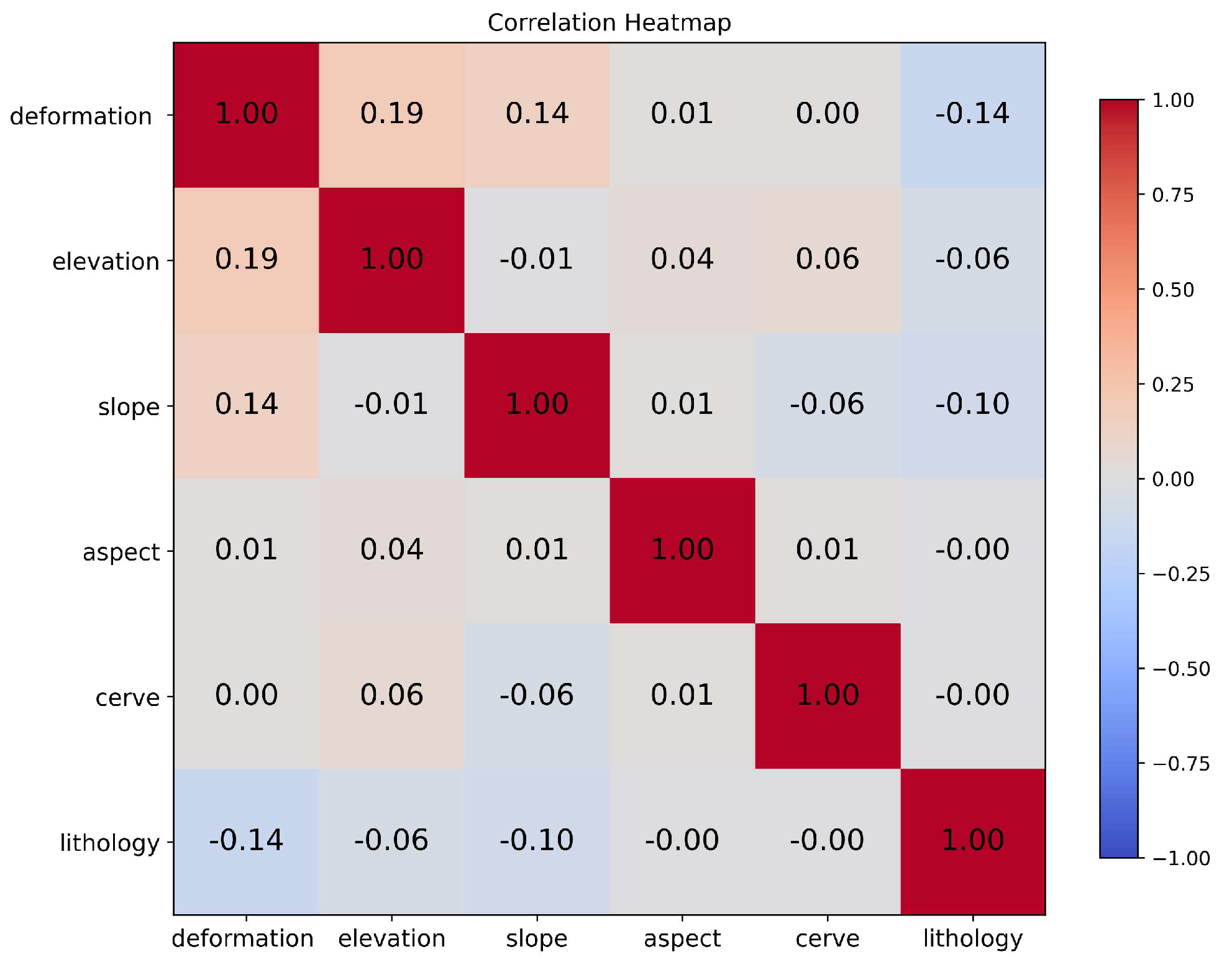
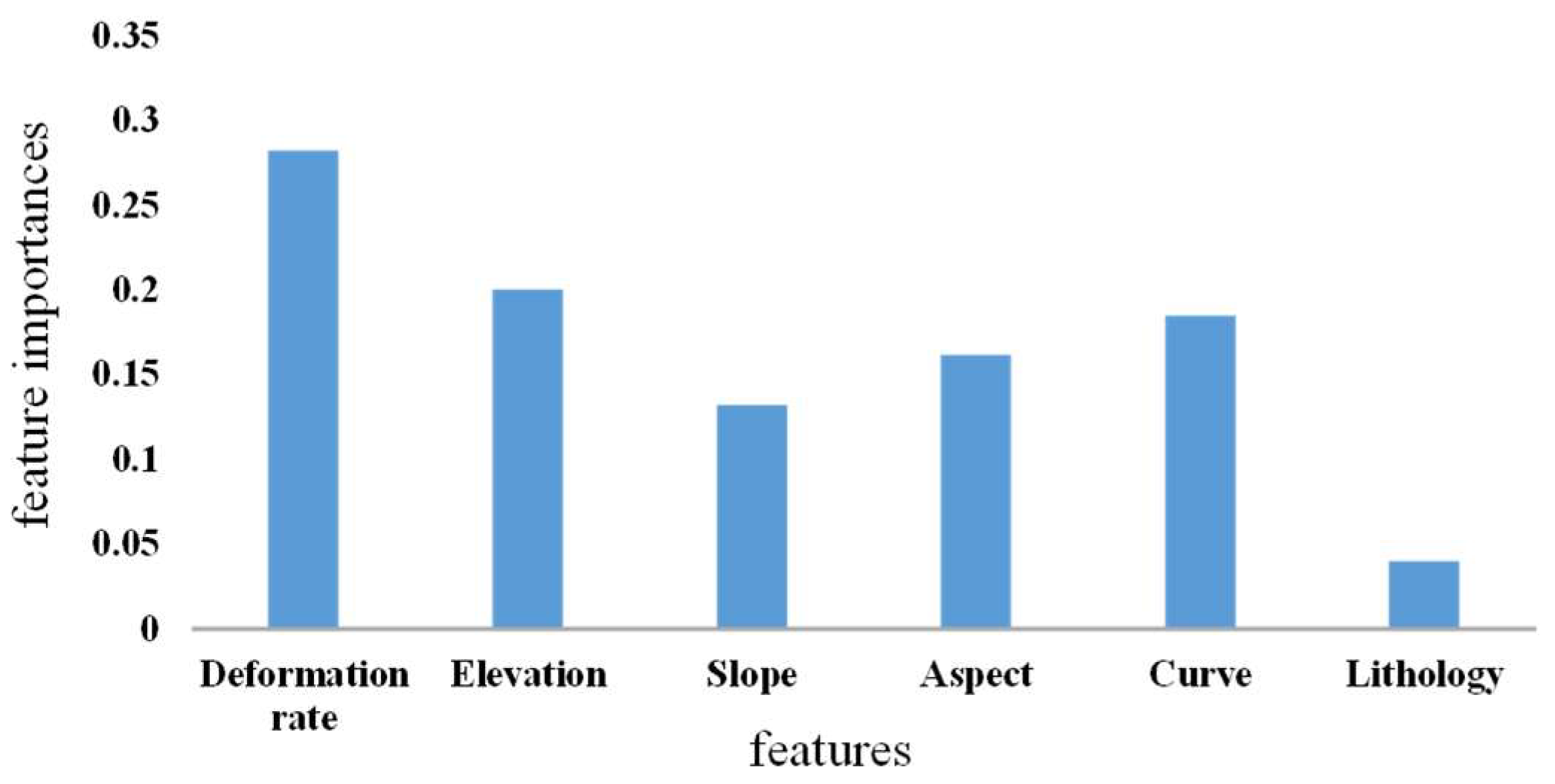
4.1. Analysis of LCFs
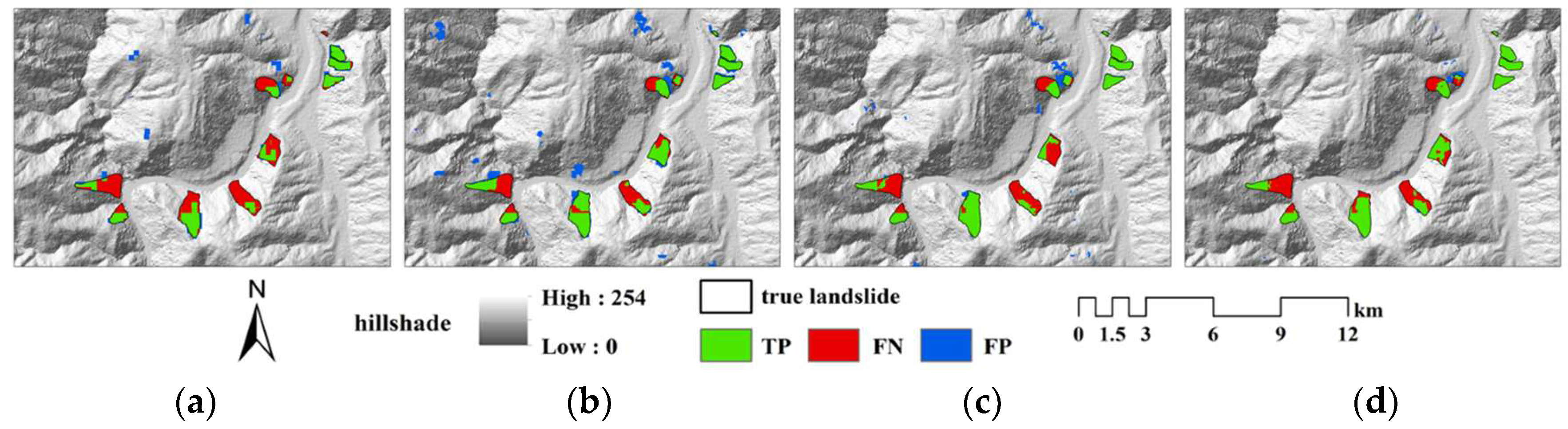
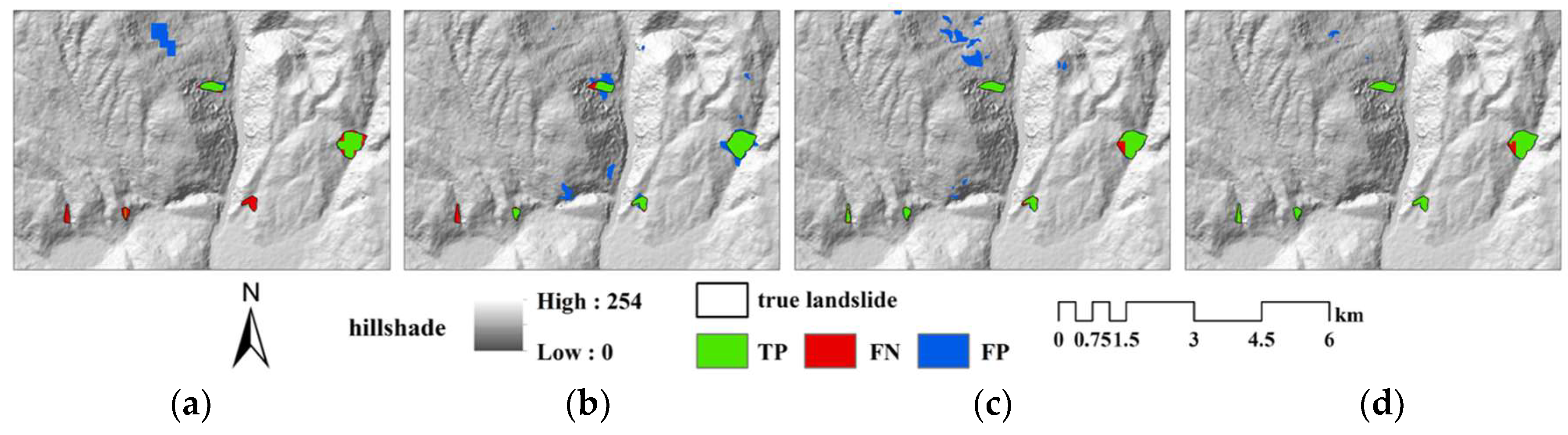
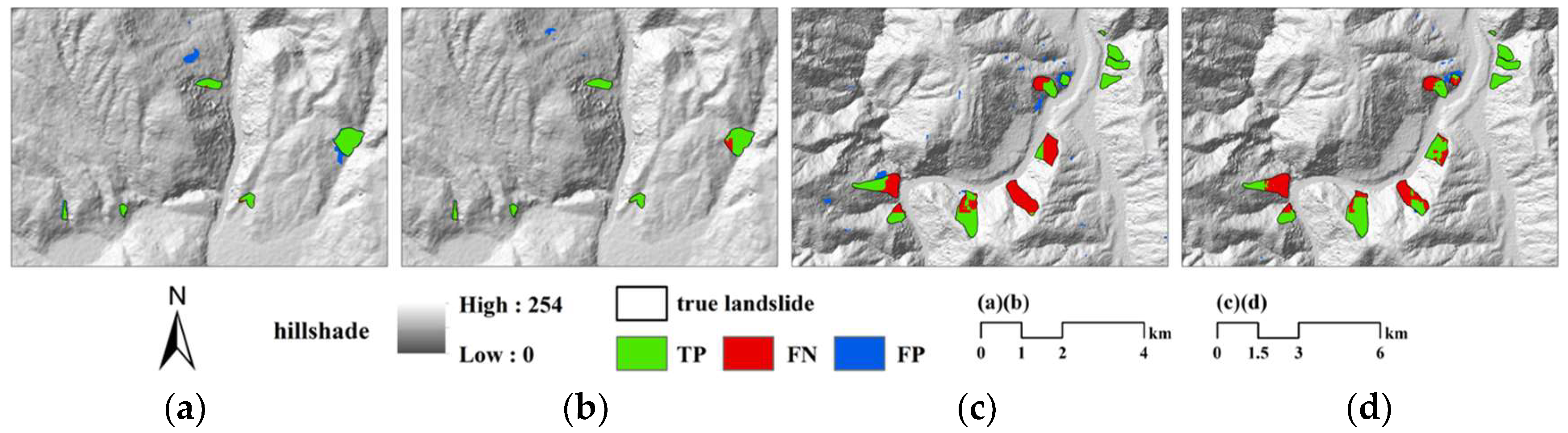
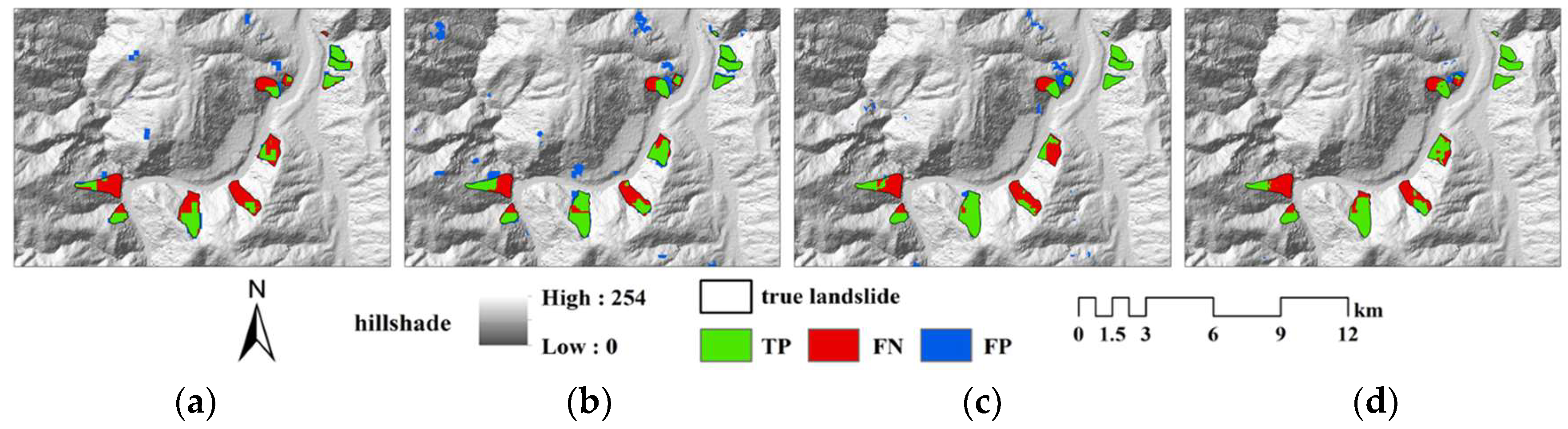
4.2. LR Results
4.3. Improvement of FCADenseNet Performance by Deformation Rate
5. Discussion
5.1. Comparisions of the Model’s Effect
5.2. Influence of Deformation Rate on LR
5.3. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Casagli, N.; Intrieri, E.; Tofani, V.; Gigli, G.; Raspini, F. Landslide Detection, Monitoring and Prediction with Remote-Sensing Techniques. Nat. Rev. Earth Environ. 2023, 4, 51–64. [Google Scholar] [CrossRef]
- Lissak, C.; Bartsch, A.; De Michele, M.; Gomez, C.; Maquaire, O.; Raucoules, D.; Roulland, T. Remote Sensing for Assessing Landslides and Associated Hazards. Surv. Geophys. 2020, 41, 1391–1435. [Google Scholar] [CrossRef]
- Gao, J.; Sang, Y. Identification and Estimation of Landslide-Debris Flow Disaster Risk in Primary and Middle School Campuses in a Mountainous Area of Southwest China. Int. J. Disaster Risk Reduct. 2017, 25, 60–71. [Google Scholar] [CrossRef]
- Catani, F. Landslide detection by deep learning of non-nadiral and crowdsourced optical images. Landslides 2021, 18, 1025–1044. [Google Scholar] [CrossRef]
- Mohan, A.; Singh, A.K.; Kumar, B.; Dwivedi, R. Review on remote sensing methods for landslide detection using machine and deep learning. Trans. Emerg. Telecommun. Technol. 2021, 32, e3998. [Google Scholar] [CrossRef]
- Du, B.; Zhang, W. Research on object-oriented high resolution remote sensing image classification technology. West. Resour. 2016, 5, 135–138. [Google Scholar]
- Long, L.; He, F.; Liu, H. The use of remote sensing satellite using deep learning in emergency monitoring of high-level landslides disaster in Jinsha River. J. Supercomput. 2021, 77, 8728–8744. [Google Scholar] [CrossRef]
- Das, R.; Wegmann, K.W. Evaluation of Machine Learning-Based Algorithms for Landslide Detection across Satellite Sensors for the 2019 Cyclone Idai Event, Chimanimani District, Zimbabwe. Landslides 2022, 19, 2965–2981. [Google Scholar] [CrossRef]
- Chen, F.; Yu, B.; Li, B. A Practical Trial of Landslide Detection from Single-Temporal Landsat8 Images Using Contour-Based Proposals and Random Forest: A Case Study of National Nepal. Landslides 2018, 15, 453–464. [Google Scholar] [CrossRef]
- Krawczyk, B.; Woźniak, M.; Schaefer, G. Cost-Sensitive Decision Tree Ensembles for Effective Imbalanced Classification. Appl. Soft Comput. 2014, 14, 554–562. [Google Scholar] [CrossRef]
- Ding, A.; Zhang, Q.; Zhou, X.; Dai, B. Automatic recognition of landslide based on CNN and texture change detection. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 444–448. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 509–518. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Chen, T.; Gao, X.; Liu, G.; Wang, C.; Zhao, Z.; Dou, J.; Niu, R.Q.; Plaza, A. BisDeNet: A New Lightweight Deep Learning-based Framework for Efficient Landslide Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 3648–3663. [Google Scholar] [CrossRef]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 9351, pp. 234–241. [Google Scholar]
- Lei, T.; Zhang, Y.; Lv, Z.; Li, S.; Liu, S.; Nandi, A.K. Landslide Inventory Mapping from Bitemporal Images Using Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2019, 16, 982–986. [Google Scholar] [CrossRef]
- Liu, P.; Wei, Y.; Wang, Q.; Chen, Y.; Xie, J. Research on Post-Earthquake Landslide Extraction Algorithm Based on Improved U-Net Model. Remote Sens. 2020, 12, 894. [Google Scholar] [CrossRef]
- Soares, L.P.; Dias, H.C.; Grohmann, C.H. Landslide Segmentation with U-Net: Evaluating Different Sampling Methods and Patch Sizes. arXiv 2020, arXiv:2007.06672. [Google Scholar]
- Qi, W.; Wei, M.; Yang, W.; Xu, C.; Ma, C. Automatic Mapping of Landslides by the ResU-Net. Remote Sens. 2020, 12, 2487. [Google Scholar] [CrossRef]
- Gorsevski, P.V.; Brown, M.K.; Panter, K.; Onasch, C.M.; Simic, A.; Snyder, J. Landslide Detection and Susceptibility Mapping Using LiDAR and an Artificial Neural Network Approach: A Case Study in the Cuyahoga Valley National Park, Ohio. Landslides 2016, 13, 467–484. [Google Scholar] [CrossRef]
- Peduto, D.; Santoro, M.; Aceto, L.; Borrelli, L.; Gullà, G. Full Integration of Geomorphological, Geotechnical, A-DInSAR and Damage Data for Detailed Geometric-Kinematic Features of a Slow-Moving Landslide in Urban Area. Landslides 2021, 18, 807–825. [Google Scholar] [CrossRef]
- Rosi, A.; Tofani, V.; Tanteri, L.; Stefanelli, C.T.; Agostini, A.; Catani, F.; Casagli, N. The new landslide inventory of Tuscany (Italy) updated with PS-InSAR: Geomorphological features and landslide distribution. Landslides 2018, 15, 5–19. [Google Scholar] [CrossRef]
- Zhao, F.; Meng, X.; Zhang, Y.; Chen, G.; Su, X.; Yue, D. Landslide susceptibility mapping of karakorum highway combined with the application of SBAS-InSAR technology. Sensors 2019, 19, 2685. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Zhao, C.; Zhang, Q.; Lu, Z.; Li, Z. Deformation of the Baige Landslide, Tibet, China, Revealed Through the Integration of Cross-Platform ALOS/PALSAR-1 and ALOS/PALSAR-2 SAR Observations. Geophys. Res. Lett. 2020, 47, e2019GL086142. [Google Scholar] [CrossRef]
- Dai, C.; Li, W.; Wang, D.; Lu, H.; Xu, Q.; Jian, J. Active Landslide Detection Based on Sentinel-1 Data and InSAR Technology in Zhouqu County, Gansu Province, Northwest China. J. Earth Sci. 2021, 32, 1092–1103. [Google Scholar] [CrossRef]
- Lattari, F.; Rucci, A.; Matteucci, M. A Deep Learning Approach for Change Points Detection in InSAR Time Series. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Cai, J.; Liu, G.; Jia, H.; Zhang, B.; Wu, R.; Fu, Y.; Xiang, W.; Mao, W.; Wang, X.; Zhang, R. A New Algorithm for Landslide Dynamic Monitoring with High Temporal Resolution by Kalman Filter Integration of Multiplatform Time-Series InSAR Processing. Int. J. Appl. Earth Obs. Geoinf. 2022, 110, 102812. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, H.; Wang, S.; Xu, L.; Peng, J. Monitoring and Stability Analysis of the Deformation in the Woda Landslide Area in Tibet, China by the DS-InSAR Method. Remote Sens. 2022, 14, 532. [Google Scholar] [CrossRef]
- Zheng, X.; He, G.; Wang, S.; Wang, Y.; Wang, G.; Yang, Z.; Yu, J.; Wang, N. Comparison of Machine Learning Methods for Potential Active Landslide Hazards Identification with Multi-Source Data. ISPRS Int. J. Geo-Inf. 2021, 10, 253. [Google Scholar] [CrossRef]
- Liu, M.; Yang, Z.; Xi, W.; Guo, J.; Yang, H. InSAR-Based Method for Deformation Monitoring of Landslide Source Area in Baihetan Reservoir, China. Front. Earth Sci. 2023, 11, 1253272. [Google Scholar] [CrossRef]
- Oludare, O.; Kazeem, R.; Adebayo, A.; Awonusi, A.; Dare, A.; Ikumapayi, O.; Adaramola, B. An Assessment of Earthquake-Induced Landslides Distribution in Nepal Using Open-Source Applications on Sentinel-1 Tops SAR Imagery. Int. J. Des. Nat. Ecodyn. 2023, 18, 237–249. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Liu, T.; Chen, T.; Niu, R.; Plaza, A. Landslide Detection Mapping Employing CNN, ResNet, and DenseNet in the Three Gorges Reservoir, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11417–11428. [Google Scholar] [CrossRef]
- Lv, Z.; Liu, T.; Shi, C.; Benediktsson, J.A. Local Histogram-Based Analysis for Detecting Land Cover Change Using VHR Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1284–1287. [Google Scholar] [CrossRef]
- Varmuza, K.; Filzmoser, P. Introduction to Multivariate Statistical Analysis in Chemometrics; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Gulick, S.P.S.; Barton, P.J.; Christeson, G.L.; Morgan, J.V.; McDonald, M.; Mendoza-Cervantes, K.; Pearson, Z.F.; Surendra, A.; Urrutia-Fucugauchi, J.; Vermeesch, P.M.; et al. Importance of Pre-Impact Crustal Structure for the Asymmetry of the Chicxulub Impact Crater. Nat. Geosci. 2008, 1, 131–135. [Google Scholar] [CrossRef]
- Berk, K.N. Tolerance and Condition in Regression Computations. J. Am. Stat. Assoc. 1977, 72, 863–866. [Google Scholar]
- Boulesteix, A.-L.; Bender, A.; Lorenzo Bermejo, J.; Strobl, C. Random Forest Gini Importance Favours SNPs with Large Minor Allele Frequency: Impact, Sources and Recommendations. Brief. Bioinform. 2012, 13, 292–304. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Chen, T.; Niu, R.; Plaza, A. Recognition and Mapping of Landslide Using a Fully Convolutional DenseNet and Influencing Factors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7881–7894. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef]
- Xiao, X.; Lian, S.; Luo, Z.; Li, S. Weighted Res-UNet for High-Quality Retina Vessel Segmentation. In Proceedings of the 2018 9th International Conference on Information Technology in Medicine and Education (ITME), Hangzhou, China, 19–21 October 2018; pp. 327–331. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. Eur. Conf. Comput. Vis. 2018, 11211, 3–19. [Google Scholar]
- Babak, M.; Dominik, S.; Andreas, U. PRNU-Based Finger Vein Sensor Identification in the Presence of Presentation Attack Data; Verlag der Technischen Universität Graz: Graz, Austria, 2019. [Google Scholar]
- Ghorbanzadeh, O.; Crivellari, A.; Ghamisi, P.; Shahabi, H.; Blaschke, T. A Comprehensive Transferability Evaluation of U-Net and ResU-Net for Landslide Detection from Sentinel-2 Data (Case Study Areas from Taiwan, China, and Japan). Sci. Rep. 2021, 11, 14629. [Google Scholar] [CrossRef]
- Othman, A.A.; Gloaguen, R.; Andreani, L.; Rahnama, M. Improving Landslide Susceptibility Mapping Using Morphometric Features in the Mawat Area, Kurdistan Region, NE Iraq: Comparison of Different Statistical Models. Geomorphology 2018, 319, 147–160. [Google Scholar] [CrossRef]
- Sameen, M.I.; Pradhan, B. Landslide Detection Using Residual Networks and the Fusion of Spectral and Topographic Information. IEEE Access 2019, 7, 114363–114373. [Google Scholar] [CrossRef]
- 48Li, C.; Yi, B.; Gao, P.; Li, H.; Sun, J.; Chen, X.; Zhong, C. Valuable Clues for DCNN-Based Landslide Detection from a Comparative Assessment in the Wenchuan Earthquake Area. Sensors 2021, 21, 5191. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Information | Number/Cloud Coverage | Resolution | Data Source |
|---|---|---|---|---|
| Sentinel-1 | 9 January 2021–29 May 2023 | 103 scenes | 5 m × 20 m | European Space Agency |
| Sentinel-2 | 20230529T034541_T48RTR | 0.7637% | 10 m | |
| 20230529T034541_T48RUR | 1.2485% | |||
| 20230521T033539_T48RTQ | 0.0565% | |||
| 20230521T033539_T48RUQ | 0.4099% | |||
| DEM | / | 12.5 m | Alaska Satellite Facility | |
| Lithology | / | / | Geologic Map | |
| Deformation Rate | Elevation | Slope | Aspect | Curve | Lithology | |
|---|---|---|---|---|---|---|
| VIF | 1.074 | 1.044 | 1.031 | 1.002 | 1.007 | 1.028 |
| TOL | 0.931 | 0.957 | 0.970 | 0.998 | 0.993 | 0.973 |
| Pre | Rec | F1 | Kappa | MIoU | |
|---|---|---|---|---|---|
| FCN | 0.6870 | 0.5354 | 0.6018 | 0.6002 | 0.7136 |
| U-Net | 0.4653 | 0.6908 | 0.5561 | 0.5543 | 0.6901 |
| FC_DenseNet | 0.6312 | 0.7043 | 0.6658 | 0.6599 | 0.7479 |
| FCADenseNet | 0.8381 | 0.6972 | 0.7611 | 0.7602 | 0.8062 |
| Pre | Rec | F1 | Kappa | MIoU | |
|---|---|---|---|---|---|
| RS | 0.6614 | 0.6878 | 0.6743 | 0.6729 | 0.7529 |
| RS-DR | 0.8381 | 0.6972 | 0.7611 | 0.7602 | 0.8062 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Shi, A.; Li, X.; Dou, J.; Li, S.; Chen, T.; Chen, T. Deep Learning-Based Landslide Recognition Incorporating Deformation Characteristics. Remote Sens. 2024, 16, 992. https://doi.org/10.3390/rs16060992
Li Z, Shi A, Li X, Dou J, Li S, Chen T, Chen T. Deep Learning-Based Landslide Recognition Incorporating Deformation Characteristics. Remote Sensing. 2024; 16(6):992. https://doi.org/10.3390/rs16060992
Chicago/Turabian StyleLi, Zhihai, Anchi Shi, Xinran Li, Jie Dou, Sijia Li, Tingxuan Chen, and Tao Chen. 2024. "Deep Learning-Based Landslide Recognition Incorporating Deformation Characteristics" Remote Sensing 16, no. 6: 992. https://doi.org/10.3390/rs16060992
APA StyleLi, Z., Shi, A., Li, X., Dou, J., Li, S., Chen, T., & Chen, T. (2024). Deep Learning-Based Landslide Recognition Incorporating Deformation Characteristics. Remote Sensing, 16(6), 992. https://doi.org/10.3390/rs16060992