
Scattering-Point-Guided Oriented RepPoints for Ship Detection


Abstract
1. Introduction
- 1.
- A reppoints-based object detection network deeply fused with SAR scattering characteristics is proposed, which leverages the profound integration of SAR image scattering properties to guide the network for high-quality learning, enabling fine-grained nearshore detection.
- 2.
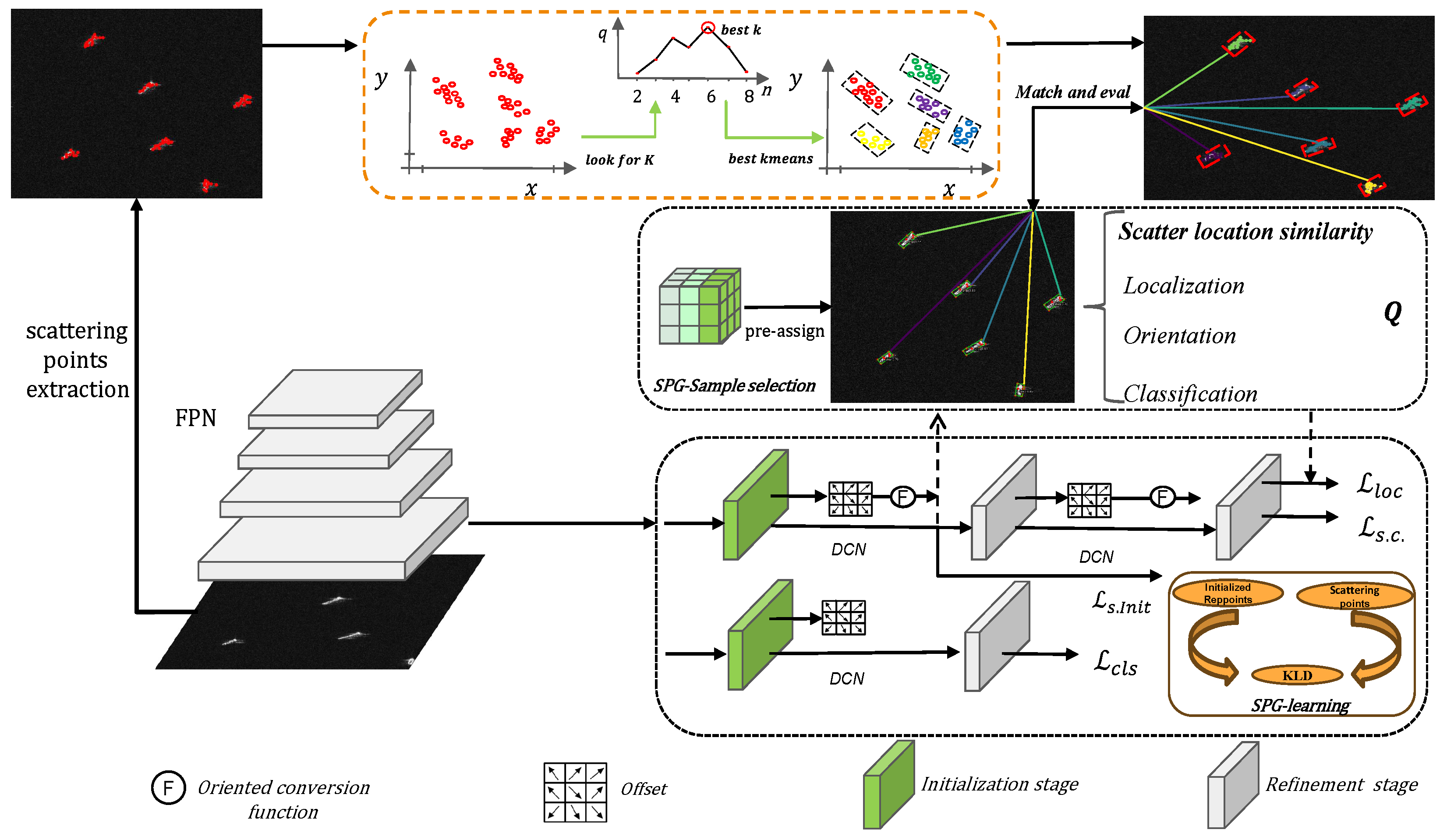
- To address the issue of low sample quality, this study introduces an innovative adaptive sample selection scheme known as SPG-ASS (Scattering-Point-Guided Adaptive Sample Selection). The method integrates the positional features of strong scattering points on ships to enhance the overall quality of samples. By extracting scattering points and clustering their positions into the optimal number of clusters, the method measures the similarity between the scattering point clusters and the set of sample points using the cosine similarity metric to achieve the best match. This, in turn, determines the quality score of the sample points. Finally, the adaptive selection of high-quality samples is achieved using the TOP K algorithm. This method further improves the quality of reppoints.
- 3.
- To reduce land scattering interference and further improve the quality of initialized reppoints, a novel reppoints supervision guidance paradigm is proposed. This paradigm aligns target scattering points with initialized reppoints at the point level by employing an intermediary framework. Using the KLD (Kullback–Leibler Divergence) loss, it integrates the structural and positional attributes of scattering point clusters into the supervised learning process of initialized reppoints. During the training phase, this paradigm effectively guides the reppoints to extract the semantic features of key regions in targets.
2. Related Works
2.1. Deep Learning-Based Object Detection
2.2. Oriented Object Detection
2.3. Sample Assignment for Object Detection
3. Materials and Methods
3.1. Overview of Model Structure
3.2. Scattering-Point-Guided Adaptive Sample Selection (SPG-ASS)
3.2.1. Extraction of Scattering Points and Clustering
3.2.2. Feature Matching and Adaptive Sample Selection
3.3. Scattering-Point-Guided Reppoints Dynamic Learning (SPG Learning)
4. Results and Discussion
4.1. Dataset and Its Evaluation Metrics
4.2. The Details of the Experiment
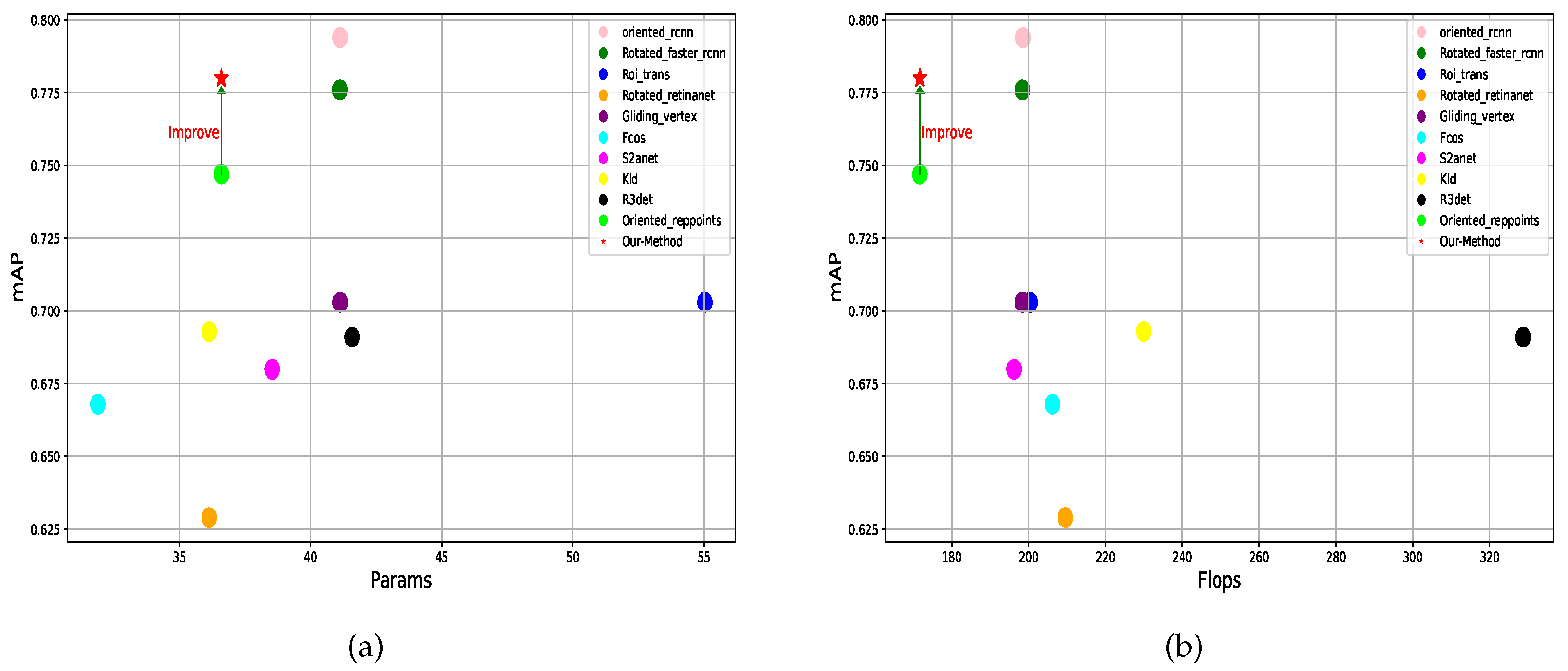
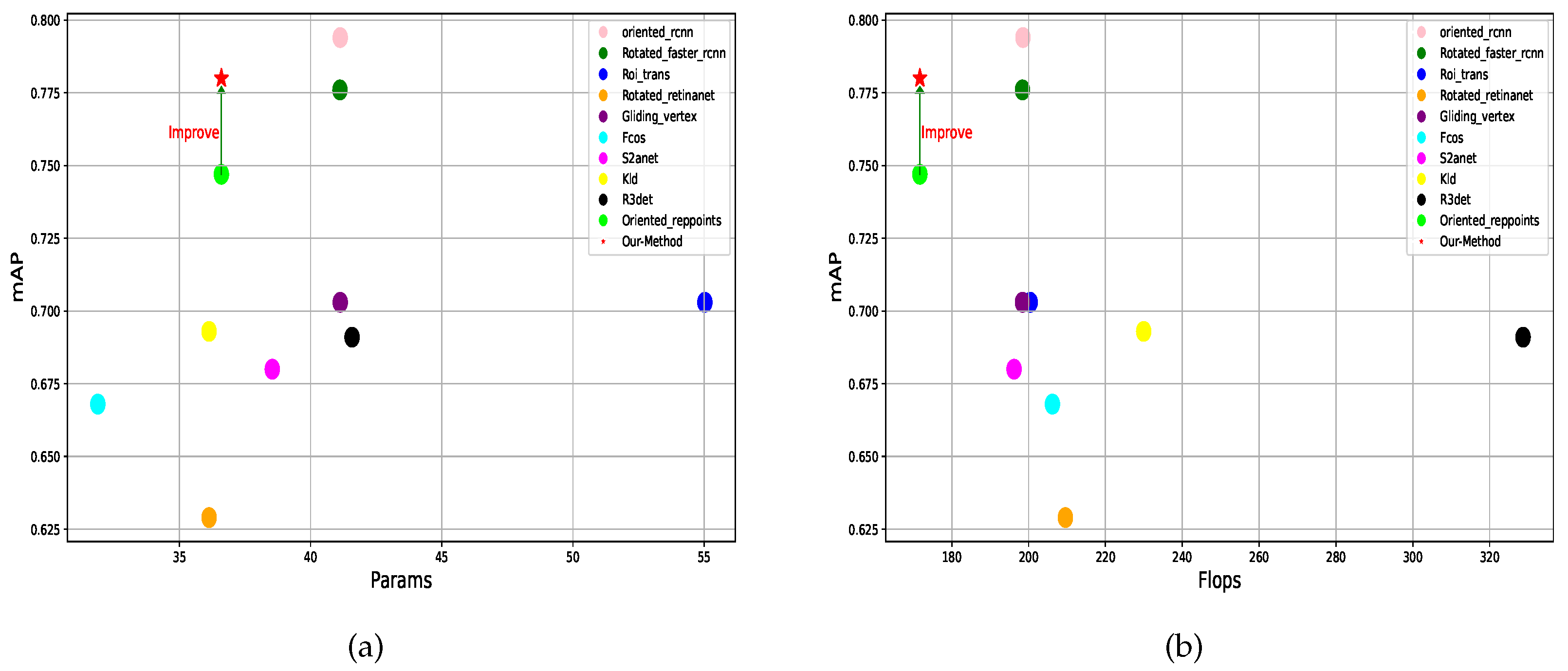
4.3. Comparison with State-of-the-Art Methods
4.4. Ablation Experiments
4.4.1. SPG-ASS
4.4.2. SPG Learning
4.4.3. SPG Oriented Reppoints Detection
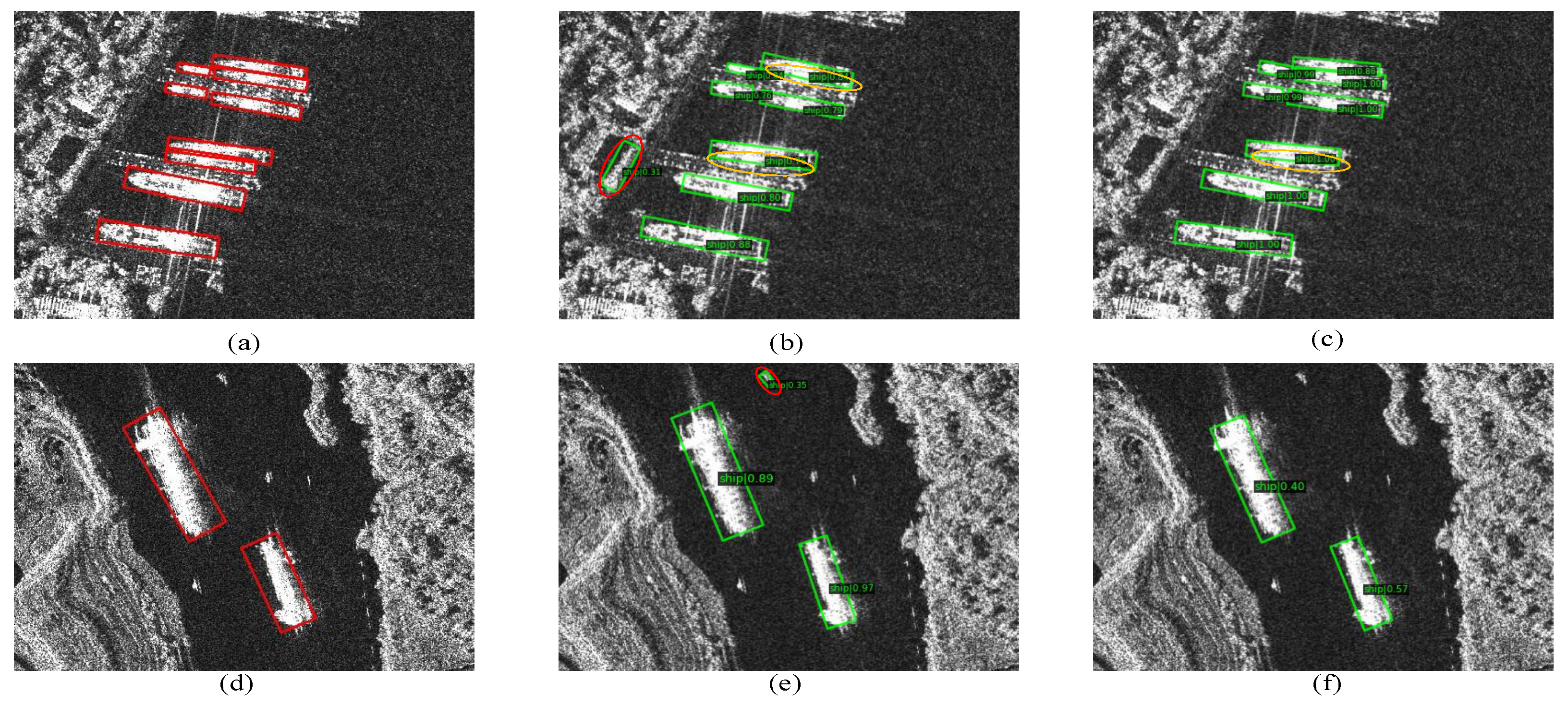
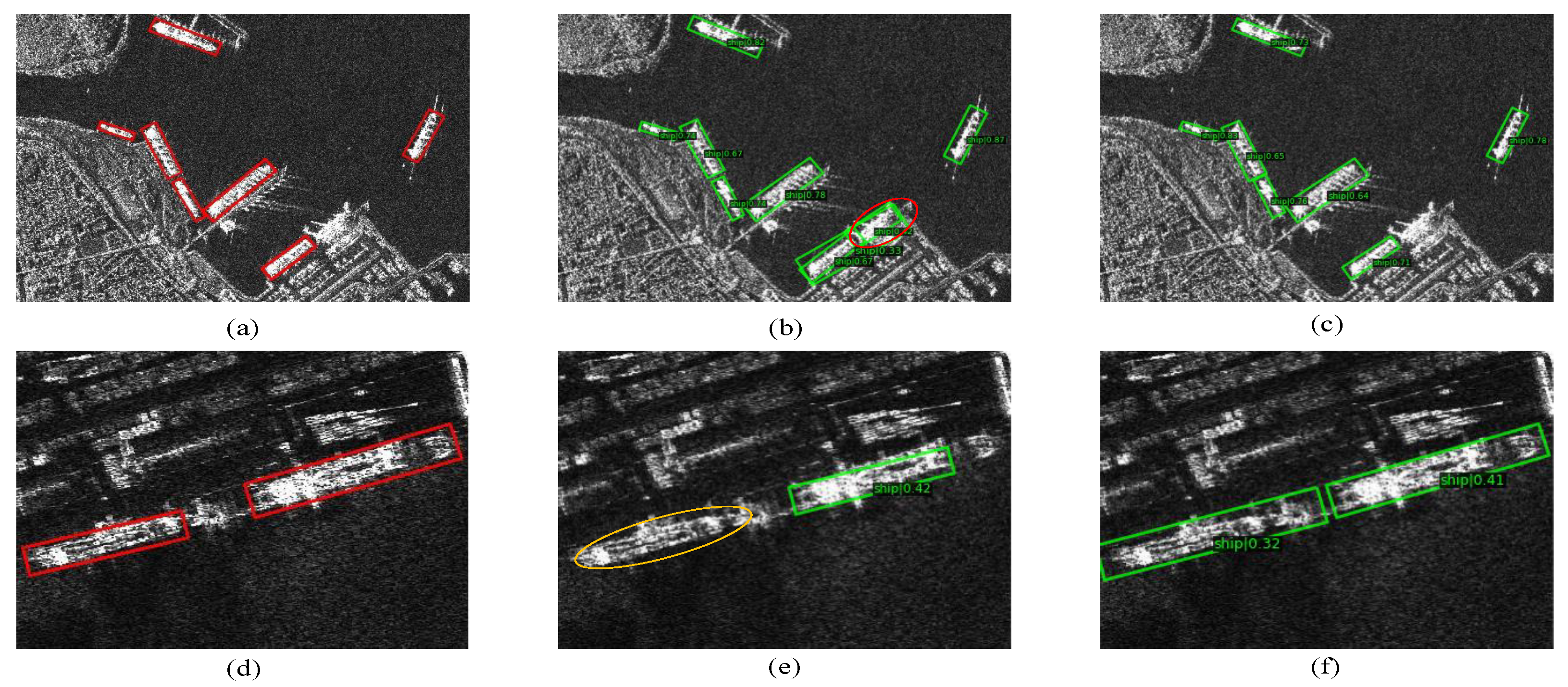
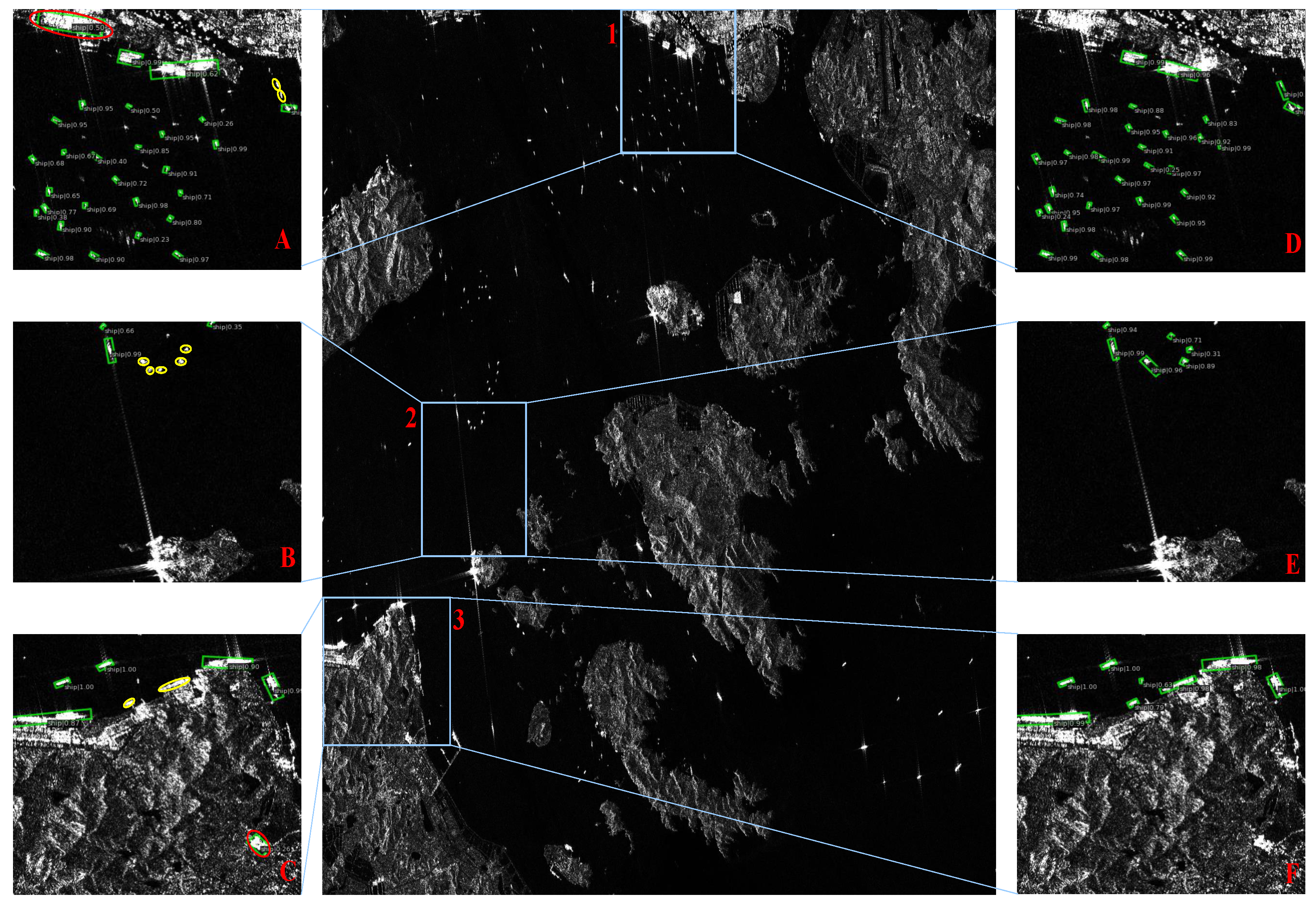
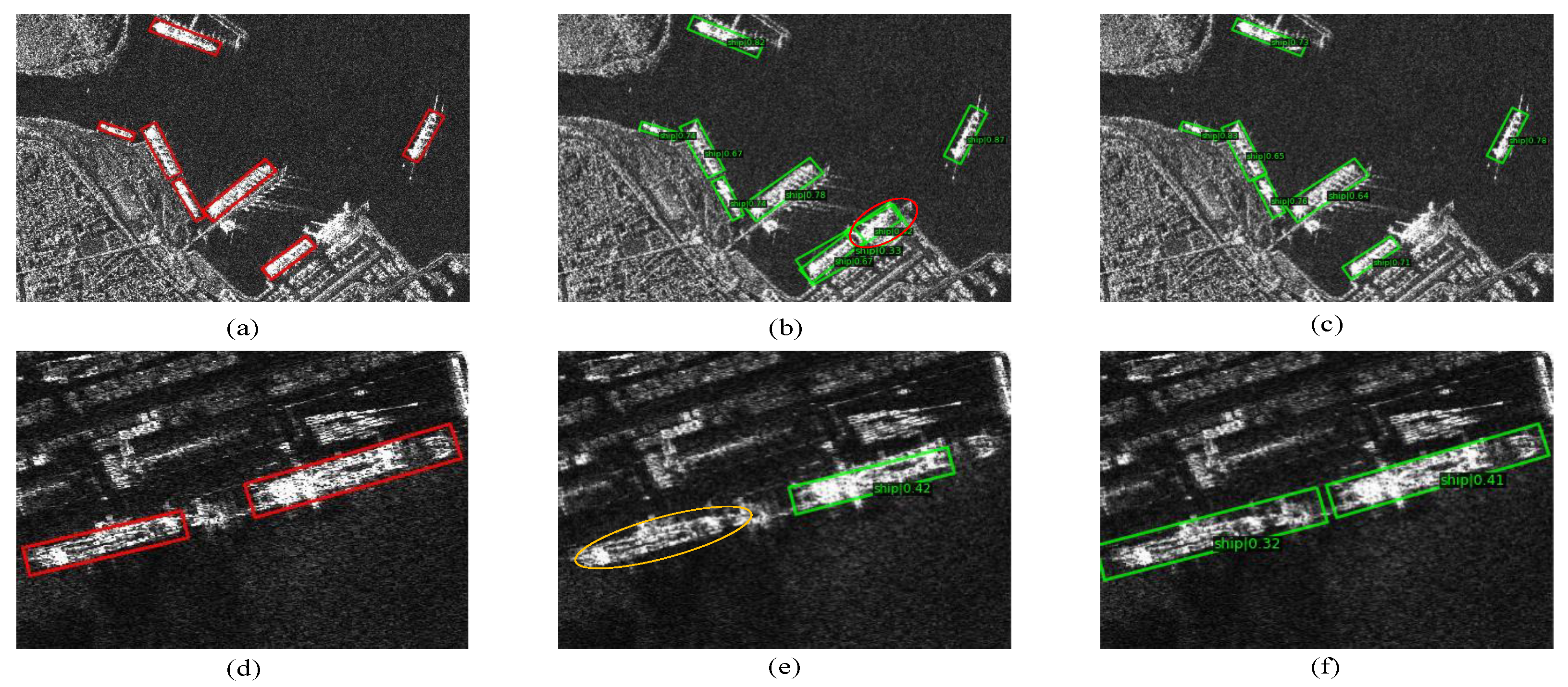
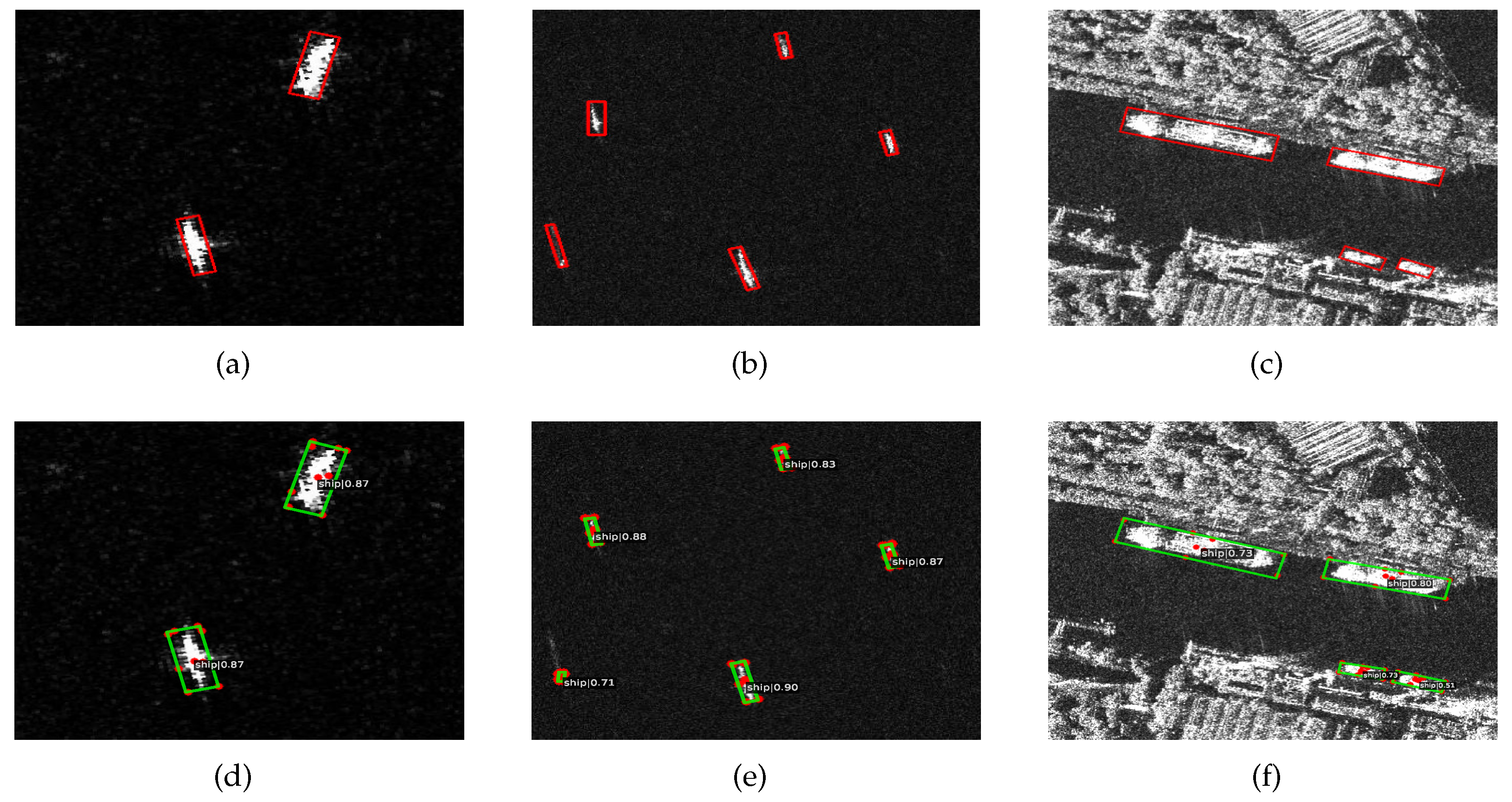
4.5. Qualitative Evaluation
4.6. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, G.; Lin, G.; Liu, Z.; Zhou, X.; Li, W.; Li, X.; Deng, R. An optical system for suppression of laser echo energy from the water surface on single-band bathymetric LiDAR. Opt. Lasers Eng. 2023, 163, 107468. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, D.; Qiu, X.; Li, F. Scattering-Point-Guided RPN for Oriented Ship Detection in SAR Images. Remote Sens. 2023, 15, 1411. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, P.; Qian, L.; Qin, S.; Liu, X.; Ma, Y.; Cheng, G. Recognition and depth estimation of ships based on binocular stereo vision. J. Mar. Sci. Eng. 2022, 10, 1153. [Google Scholar] [CrossRef]
- Reigber, A.; Scheiber, R.; Jager, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.P.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-High-Resolution Airborne Synthetic Aperture Radar Imaging: Signal Processing and Applications. Proc. IEEE 2013, 101, 759–783. [Google Scholar] [CrossRef]
- Castelletti, D.; Farquharson, G.; Stringham, C.; Duersch, M.; Eddy, D. Capella space first operational SAR satellite. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1483–1486. [Google Scholar]
- Jordan, R.L.; Huneycutt, B.L.; Werner, M. The SIR-C/X-SAR synthetic aperture radar system. IEEE Trans. Geosci. Remote Sens. 1995, 33, 829–839. [Google Scholar] [CrossRef]
- Orzel, K.; Fujimaru, S.; Obata, T.; Imaizumi, T.; Arai, M. The on-orbit demonstration of the small SAR satellite. Initial calibration and observations. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York City, NY, USA, 21–25 March 2022; pp. 1–5. [Google Scholar]
- Mao, Y.; Zhu, Y.; Tang, Z.; Chen, Z. A novel airspace planning algorithm for cooperative target localization. Electronics 2022, 11, 2950. [Google Scholar] [CrossRef]
- Zhang, F.; Yao, X.; Tang, H.; Yin, Q.; Hu, Y.; Lei, B. Multiple mode SAR raw data simulation and parallel acceleration for Gaofen-3 mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2115–2126. [Google Scholar] [CrossRef]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A high-resolution SAR images dataset for ship detection and instance segmentation. IEEE Access 2020, 8, 120234–120254. [Google Scholar] [CrossRef]
- Bastani, F.; Wolters, P.; Gupta, R.; Ferdinando, J.; Kembhavi, A. SatlasPretrain: A Large-Scale Dataset for Remote Sensing Image Understanding. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 2–6 October 2023; pp. 16772–16782. [Google Scholar]
- Yasir, M.; Niang, A.J.; Hossain, M.S.; Islam, Q.U.; Yang, Q.; Yin, Y. Ranking Ship Detection Methods Using SAR Images Based on Machine Learning and Artificial Intelligence. J. Mar. Sci. Eng. 2023, 11, 1916. [Google Scholar] [CrossRef]
- Kuttikkad, S.; Chellappa, R. Non-Gaussian CFAR techniques for target detection in high resolution SAR images. In Proceedings of the 1st International Conference on Image Processing, Austin, TX, USA, 3–16 November 1994; Volume 1, pp. 910–914. [Google Scholar]
- El-Darymli, K.; McGuire, P.; Power, D.; Moloney, C. Target detection in synthetic aperture radar imagery: A state-of-the-art survey. J. Appl. Remote Sens. 2013, 7, 071598. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Yang, K.; Zou, H. A bilateral CFAR algorithm for ship detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1536–1540. [Google Scholar] [CrossRef]
- Dai, H.; Du, L.; Wang, Y.; Wang, Z. A modified CFAR algorithm based on object proposals for ship target detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1925–1929. [Google Scholar] [CrossRef]
- Liao, M.; Wang, C.; Wang, Y.; Jiang, L. Using SAR Images to Detect Ships From Sea Clutter. IEEE Geosci. Remote Sens. Lett. 2008, 5, 194–198. [Google Scholar] [CrossRef]
- Ai, J.; Tian, R.; Luo, Q.; Jin, J.; Tang, B. Multi-Scale Rotation-Invariant Haar-Like Feature Integrated CNN-Based Ship Detection Algorithm of Multiple-Target Environment in SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10070–10087. [Google Scholar] [CrossRef]
- Yasir, M.; Liu, S.; Mingming, X.; Wan, J.; Pirasteh, S.; Dang, K.B. ShipGeoNet: SAR Image-Based Geometric Feature Extraction of Ships Using Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–13. [Google Scholar] [CrossRef]
- Chang, Y.L.; Anagaw, A.; Chang, L.; Wang, Y.C.; Hsiao, C.Y.; Lee, W.H. Ship detection based on YOLOv2 for SAR imagery. Remote Sens. 2019, 11, 786. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, J.; Zhan, R. R2FA-Det: Delving into high-quality rotatable boxes for ship detection in SAR images. Remote Sens. 2020, 12, 2031. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. In Computer Vision—ECCV 2014; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; pp. 346–361. [Google Scholar] [CrossRef]
- Girshick, R.B. Fast R-CNN. arXiv 2015, arXiv:1504.08083. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.B.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. arXiv 2015, arXiv:1506.01497. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Dollár, P.; Girshick, R.B.; He, K.; Hariharan, B.; Belongie, S.J. Feature Pyramid Networks for Object Detection. arXiv 2016, arXiv:1612.03144. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Part I. Springer: Berlin/Heidelberg, Germany, 2016; Volume 14, pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Zhou, X.; Wang, D.; Krähenbühl, P. Objects as Points. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Yang, Z.; Liu, S.; Hu, H.; Wang, L.; Lin, S. RepPoints: Point Set Representation for Object Detection. arXiv 2019, arXiv:1904.11490. [Google Scholar]
- Ding, J.; Xue, N.; Long, Y.; Xia, G.S.; Lu, Q. Learning RoI transformer for oriented object detection in aerial images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–17 June 2019; pp. 2849–2858. [Google Scholar]
- Xie, X.; Cheng, G.; Wang, J.; Yao, X.; Han, J. Oriented R-CNN for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 3520–3529. [Google Scholar]
- Yang, X.; Yang, X.; Yang, J.; Ming, Q.; Wang, W.; Tian, Q.; Yan, J. Learning high-precision bounding box for rotated object detection via kullback-leibler divergence. Adv. Neural Inf. Process. Syst. 2021, 34, 18381–18394. [Google Scholar]
- Hou, L.; Lu, K.; Yang, X.; Li, Y.; Xue, J. G-Rep: Gaussian Representation for Arbitrary-Oriented Object Detection. Remote Sens. 2023, 15, 757. [Google Scholar] [CrossRef]
- Li, W.; Zhu, J. Oriented RepPoints for Aerial Object Detection. arXiv 2021, arXiv:2105.11111. [Google Scholar]
- Zhang, Z.; Guo, W.; Zhu, S.; Yu, W. Toward Arbitrary-Oriented Ship Detection With Rotated Region Proposal and Discrimination Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1745–1749. [Google Scholar] [CrossRef]
- Yang, R.; Pan, Z.; Jia, X.; Zhang, L.; Deng, Y. A Novel CNN-Based Detector for Ship Detection Based on Rotatable Bounding Box in SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1938–1958. [Google Scholar] [CrossRef]
- Yue, T.; Zhang, Y.; Wang, J.; Xu, Y.; Liu, P.; Yu, C. A Precise Oriented Ship Detector in SAR Images Based on Dynamic Rotated Positive Sample Mining. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 10022–10035. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, Z.; Sun, X.; Fu, K. SPAN: Strong Scattering Point Aware Network for Ship Detection and Classification in Large-Scale SAR Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1188–1204. [Google Scholar] [CrossRef]
- Ge, Z.; Liu, S.; Li, Z.; Yoshie, O.; Sun, J. OTA: Optimal Transport Assignment for Object Detection. arXiv 2021, arXiv:2103.14259. [Google Scholar]
- Kim, K.; Lee, H.S. Probabilistic Anchor Assignment with IoU Prediction for Object Detection. arXiv 2020, arXiv:2007.08103. [Google Scholar]
- Zhou, G.; Wu, G.; Zhou, X.; Xu, C.; Zhao, D.; Lin, J.; Liu, Z.; Zhang, H.; Wang, Q.; Xu, J.; et al. Adaptive model for the water depth bias correction of bathymetric LiDAR point cloud data. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103253. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–17 June 2019; pp. 658–666. [Google Scholar]
- Butt, M.A.; Maragos, P. Optimum design of chamfer distance transforms. IEEE Trans. Image Process. 1998, 7, 1477–1484. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Zhang, X.; Li, J.; Xu, X.; Wang, B.; Zhan, X.; Xu, Y.; Ke, X.; Zeng, T.; Su, H.; et al. SAR ship detection dataset (SSDD): Official release and comprehensive data analysis. Remote Sens. 2021, 13, 3690. [Google Scholar] [CrossRef]
- Xu, Y.; Fu, M.; Wang, Q.; Wang, Y.; Chen, K.; Xia, G.S.; Bai, X. Gliding Vertex on the Horizontal Bounding Box for Multi-Oriented Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1452–1459. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. arXiv 2019, arXiv:1904.01355. [Google Scholar]
- Han, J.; Ding, J.; Li, J.; Xia, G.S. Align deep features for oriented object detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Q.; Yan, J.; Li, A. R3Det: Refined Single-Stage Detector with Feature Refinement for Rotating Object. arXiv 2019, arXiv:1908.05612. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Backbone | mAP | Recall | Params (M) | Flops (GFLOPs) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Nearshore | Offshore | Total | Nearshore | Offshore | Total | ||||
| Oriented-rcnn | R-50-FPN | 0.794 | 0.906 | 0.902 | 0.847 | 0.963 | 0.934 | 41.13 | 198.53 |
| Rotated-faster-rcnn | R-50-FPN | 0.776 | 0.904 | 0.896 | 0.824 | 0.963 | 0.929 | 41.12 | 198.40 |
| Roi-trans | R-50-FPN | 0.703 | 0.903 | 0.893 | 0.779 | 0.943 | 0.902 | 55.03 | 200.41 |
| Rotated-retinanet | R-50-FPN | 0.629 | 0.904 | 0.864 | 0.763 | 0.945 | 0.900 | 36.13 | 209.58 |
| Gliding-vertex | R-50-FPN | 0.703 | 0.903 | 0.892 | 0.763 | 0.935 | 0.893 | 41.13 | 198.40 |
| Fcos | R-50-FPN | 0.668 | 0.904 | 0.810 | 0.740 | 0.938 | 0.889 | 31.89 | 206.20 |
| S2anet | R-50-FPN | 0.680 | 0.897 | 0.804 | 0.786 | 0.928 | 0.893 | 38.54 | 196.21 |
| Kld | R-50-FPN | 0.693 | 0.904 | 0.892 | 0.771 | 0.955 | 0.910 | 36.13 | 229.95 |
| R3det | R-50-FPN | 0.691 | 0.906 | 0.890 | 0.740 | 0.965 | 0.910 | 41.58 | 328.70 |
| Oriented reppoints (baseline) | R-50-FPN | 0.747 | 0.904 | 0.895 | 0.863 | 0.965 | 0.940 | 36.60 | 171.70 |
| Our method | R-50-FPN | 0.780 | 0.904 | 0.898 | 0.885 | 0.963 | 0.944 | 36.60 | 171.70 |
| Method | Backbone | mAP | Recall | Params (M) | Flops (GFLOPs) | ||||
|---|---|---|---|---|---|---|---|---|---|
| Nearshore | Offshore | Total | Nearshore | Offshore | Total | ||||
| Oriented-rcnn | R-50-FPN | 0.543 | 0.905 | 0.781 | 0.670 | 0.957 | 0.830 | 41.13 | 198.53 |
| Rotated-faster-rcnn | R-50-FPN | 0.523 | 0.901 | 0.774 | 0.639 | 0.955 | 0.815 | 41.12 | 198.40 |
| Roi-trans | R-50-FPN | 0.521 | 0.906 | 0.774 | 0.668 | 0.953 | 0.827 | 55.03 | 200.41 |
| Rotated-retinanet | R-50-FPN | 0.481 | 0.903 | 0.689 | 0.632 | 0.945 | 0.812 | 36.13 | 209.58 |
| Gliding-vertex | R-50-FPN | 0.509 | 0.903 | 0.709 | 0.628 | 0.934 | 0.799 | 41.13 | 198.40 |
| Fcos | R-50-FPN | 0.383 | 0.903 | 0.696 | 0.544 | 0.954 | 0.772 | 31.89 | 206.20 |
| S2anet | R-50-FPN | 0.493 | 0.905 | 0.759 | 0.645 | 0.949 | 0.814 | 38.54 | 196.21 |
| Kld | R-50-FPN | 0.506 | 0.904 | 0.776 | 0.771 | 0.969 | 0.844 | 36.13 | 229.95 |
| R3det | R-50-FPN | 0.463 | 0.904 | 0.708 | 0.605 | 0.935 | 0.789 | 41.58 | 328.70 |
| Oriented reppoints (baseline) | R-50-FPN | 0.532 | 0.905 | 0.763 | 0.669 | 0.955 | 0.840 | 36.60 | 171.70 |
| Our method | R-50-FPN | 0.568 | 0.906 | 0.808 | 0.810 | 0.963 | 0.869 | 36.60 | 171.70 |
| SPG-ASS | SPG Learning | Map (Nearshore) ↑ | Recall (Nearshore) ↑ | |
|---|---|---|---|---|
| I | 0.747 | 0.863 | ||
| II | ✓ | 0.760 | 0.878 | |
| III | ✓ | 0.763 | 0.865 | |
| IV | ✓ | ✓ | 0.780 | 0.885 |
| Satellite | Center (Longitude/Latitude) | Scene Date (UTC) | Imaging Mode | Resolution | Band | Polarization |
|---|---|---|---|---|---|---|
| Sentinel-1 | 122.147°/29.369° | 12 May 2019 09:53:10.579856 | IW | 13.957 m | C | VH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Huang, L.; Liu, H.; Yan, C. Scattering-Point-Guided Oriented RepPoints for Ship Detection. Remote Sens. 2024, 16, 933. https://doi.org/10.3390/rs16060933
Zhao W, Huang L, Liu H, Yan C. Scattering-Point-Guided Oriented RepPoints for Ship Detection. Remote Sensing. 2024; 16(6):933. https://doi.org/10.3390/rs16060933
Chicago/Turabian StyleZhao, Weishan, Lijia Huang, Haitian Liu, and Chaobao Yan. 2024. "Scattering-Point-Guided Oriented RepPoints for Ship Detection" Remote Sensing 16, no. 6: 933. https://doi.org/10.3390/rs16060933
APA StyleZhao, W., Huang, L., Liu, H., & Yan, C. (2024). Scattering-Point-Guided Oriented RepPoints for Ship Detection. Remote Sensing, 16(6), 933. https://doi.org/10.3390/rs16060933