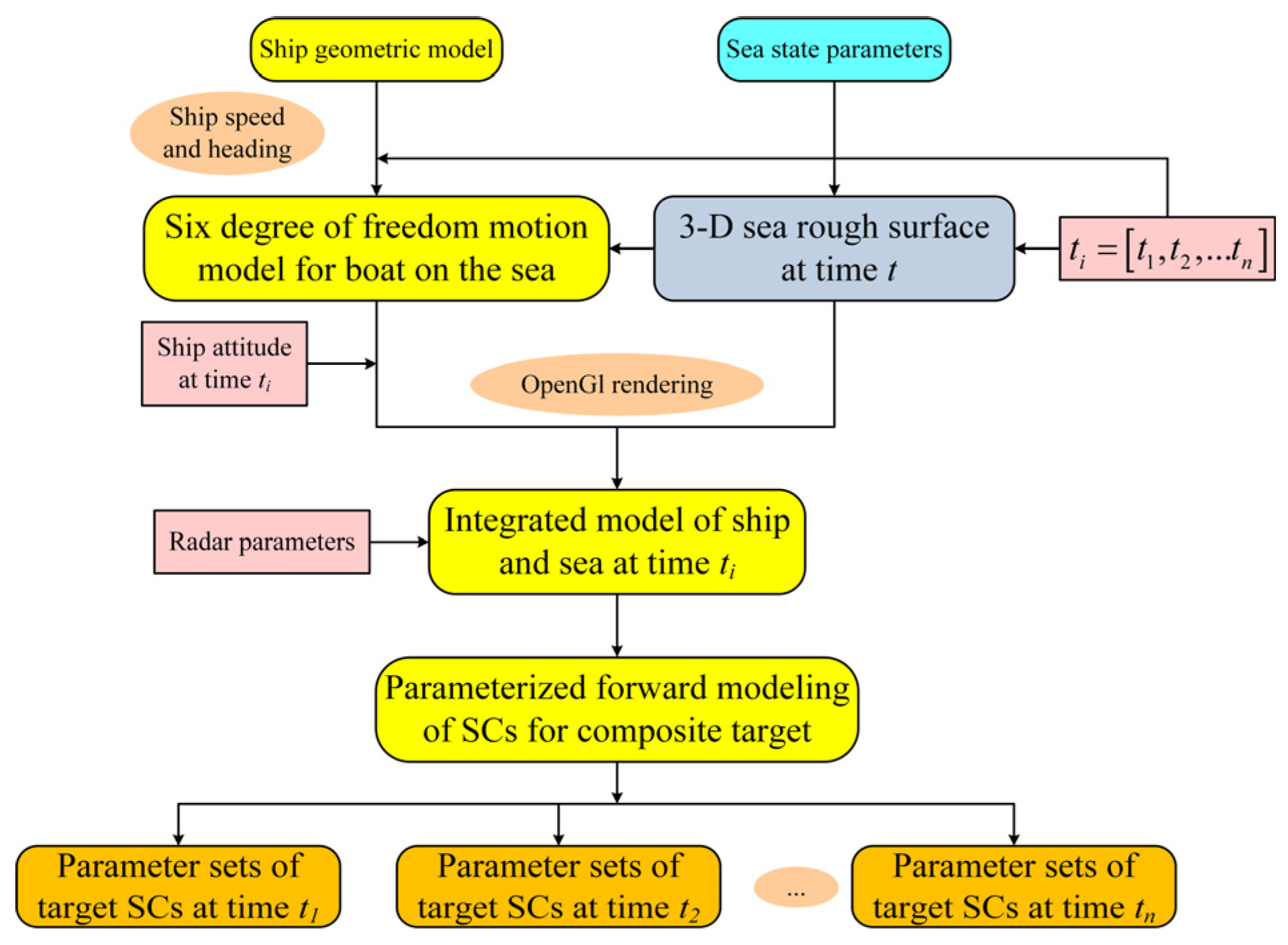
Figure 1.
Flowchart for the forward-modeling process of scattering centers from dynamic targets on time-varying sea surfaces.
Figure 1.
Flowchart for the forward-modeling process of scattering centers from dynamic targets on time-varying sea surfaces.
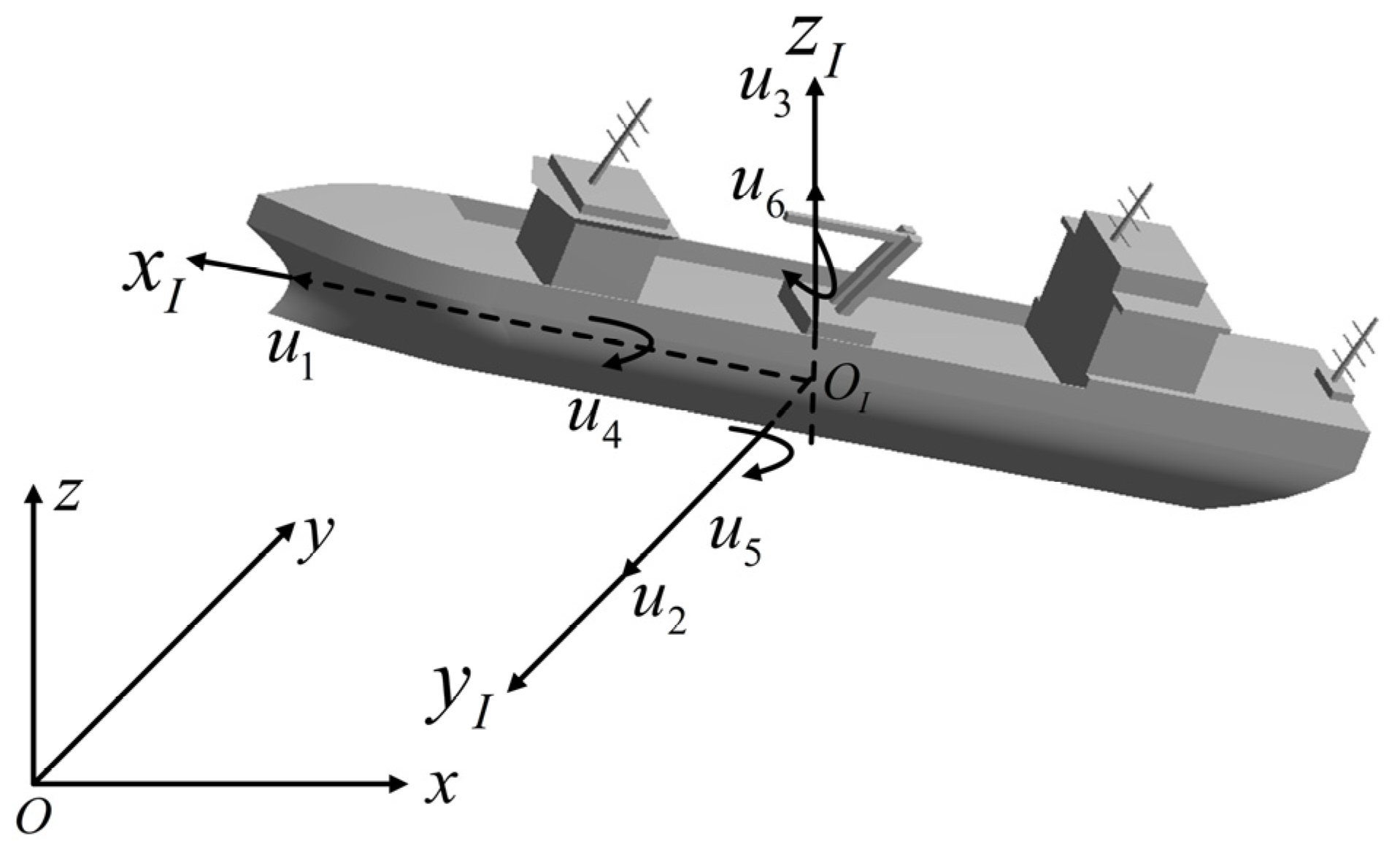
Figure 2.
Diagram of the six-degrees-of-freedom motion of the ship’s hull.
Figure 2.
Diagram of the six-degrees-of-freedom motion of the ship’s hull.
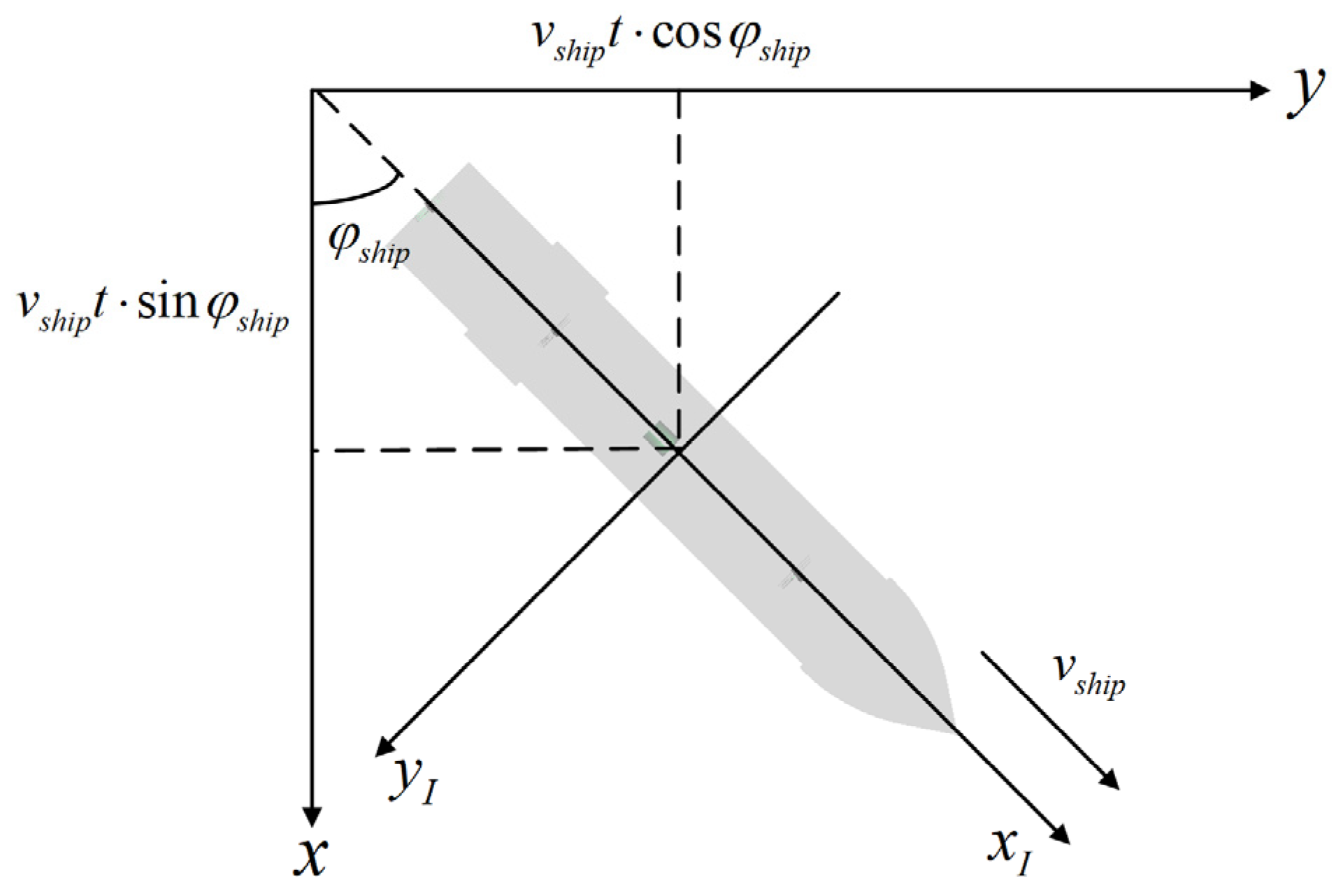
Figure 3.
Representation of ship speed and heading in the global coordinate system.
Figure 3.
Representation of ship speed and heading in the global coordinate system.
Figure 4.
Simulation workflow for six-degrees-of-freedom motion on two-dimensional waves.
Figure 4.
Simulation workflow for six-degrees-of-freedom motion on two-dimensional waves.
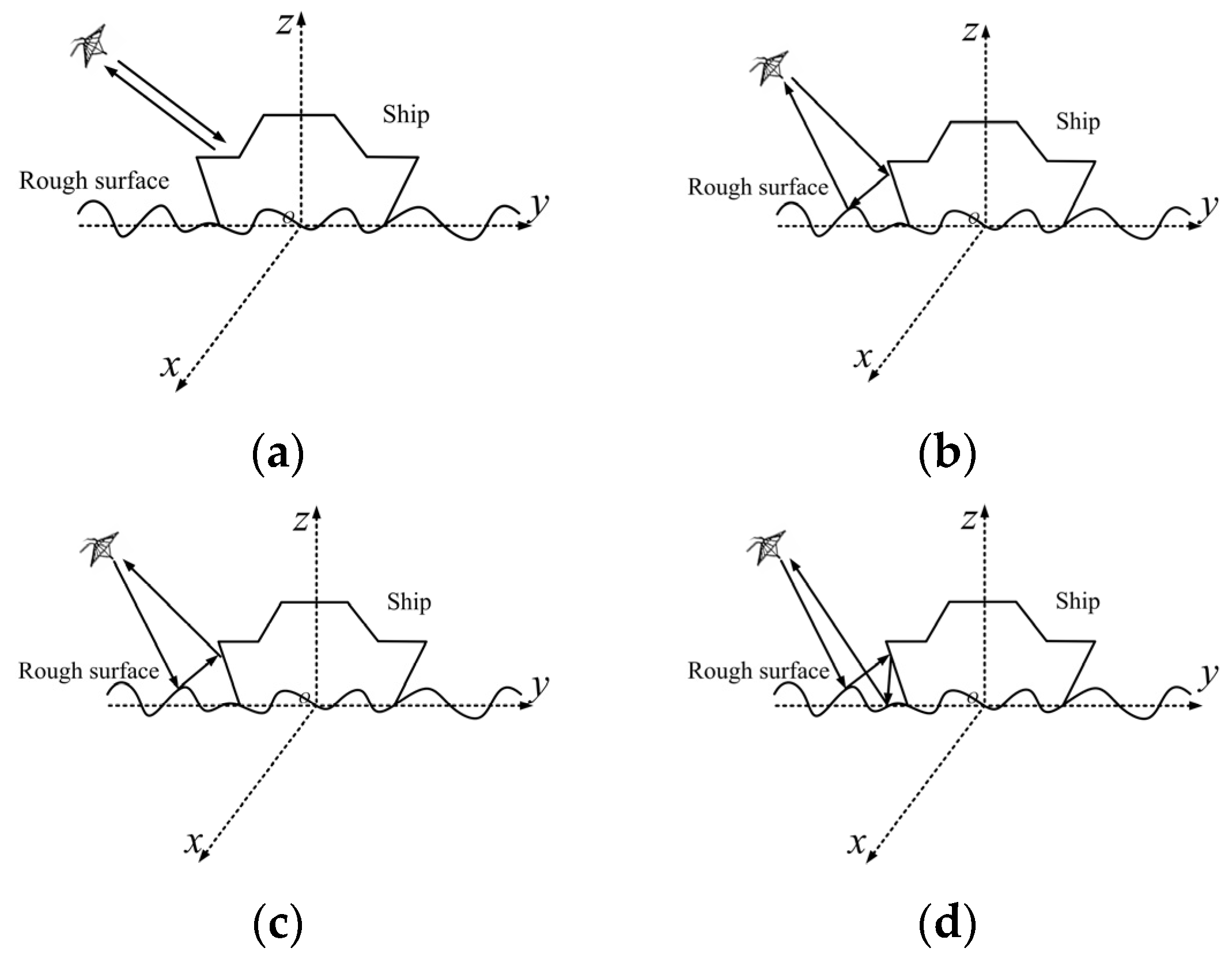
Figure 5.
Analysis of the four-path model: scattering sources in integrated ship–sea model. (a) Path 1, (b) path 2, (c) path 3, (d) path 4.
Figure 5.
Analysis of the four-path model: scattering sources in integrated ship–sea model. (a) Path 1, (b) path 2, (c) path 3, (d) path 4.
Figure 6.
Flowchart for the forward extraction of maritime ship SC parameterization.
Figure 6.
Flowchart for the forward extraction of maritime ship SC parameterization.
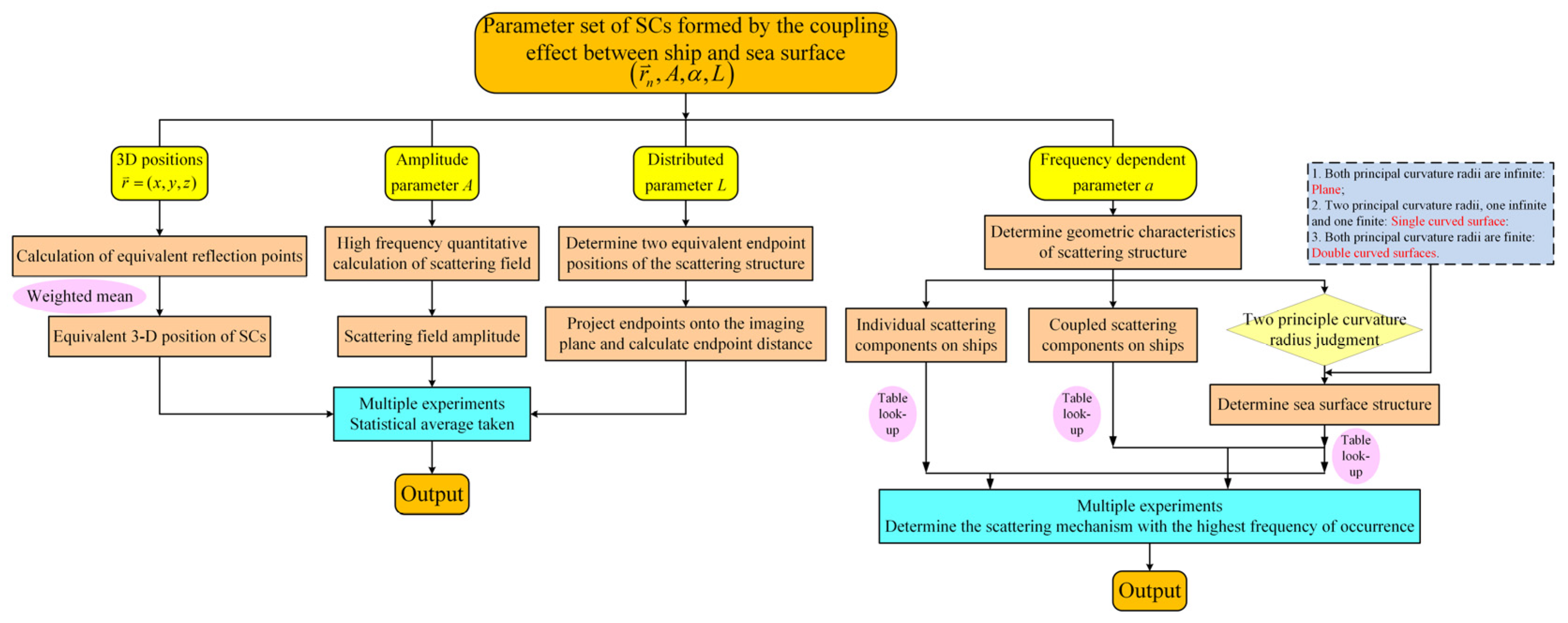
Figure 7.
Flowchart of the technique for deducing and assigning parameters of ship–sea coupled SCs.
Figure 7.
Flowchart of the technique for deducing and assigning parameters of ship–sea coupled SCs.
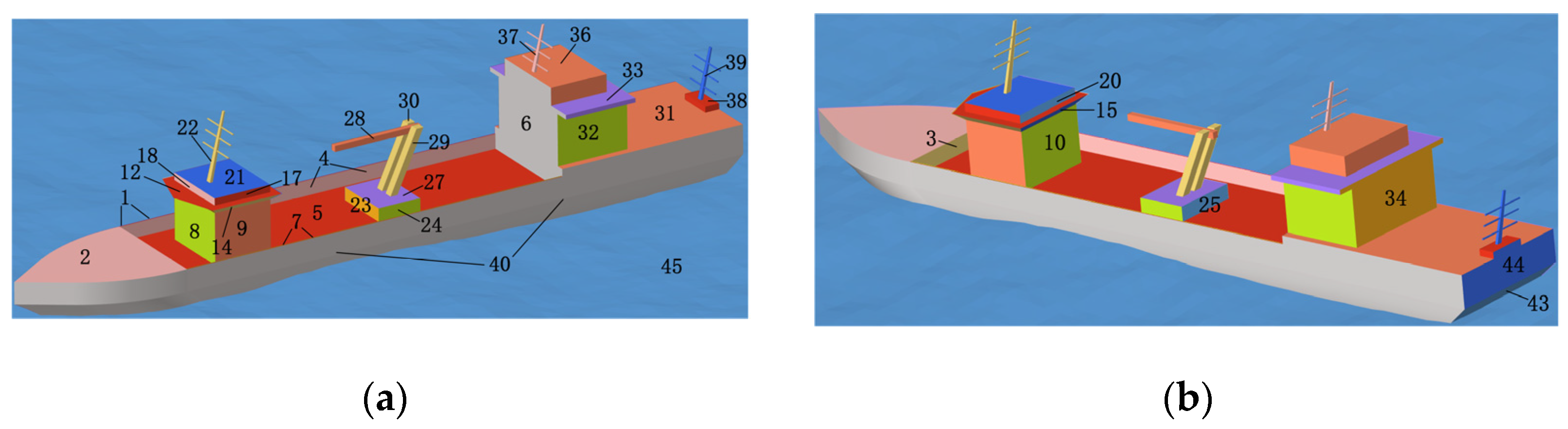
Figure 8.
Schematic of the fishing ship model at sea. (a) Right-side view, (b) rear-side view.
Figure 8.
Schematic of the fishing ship model at sea. (a) Right-side view, (b) rear-side view.
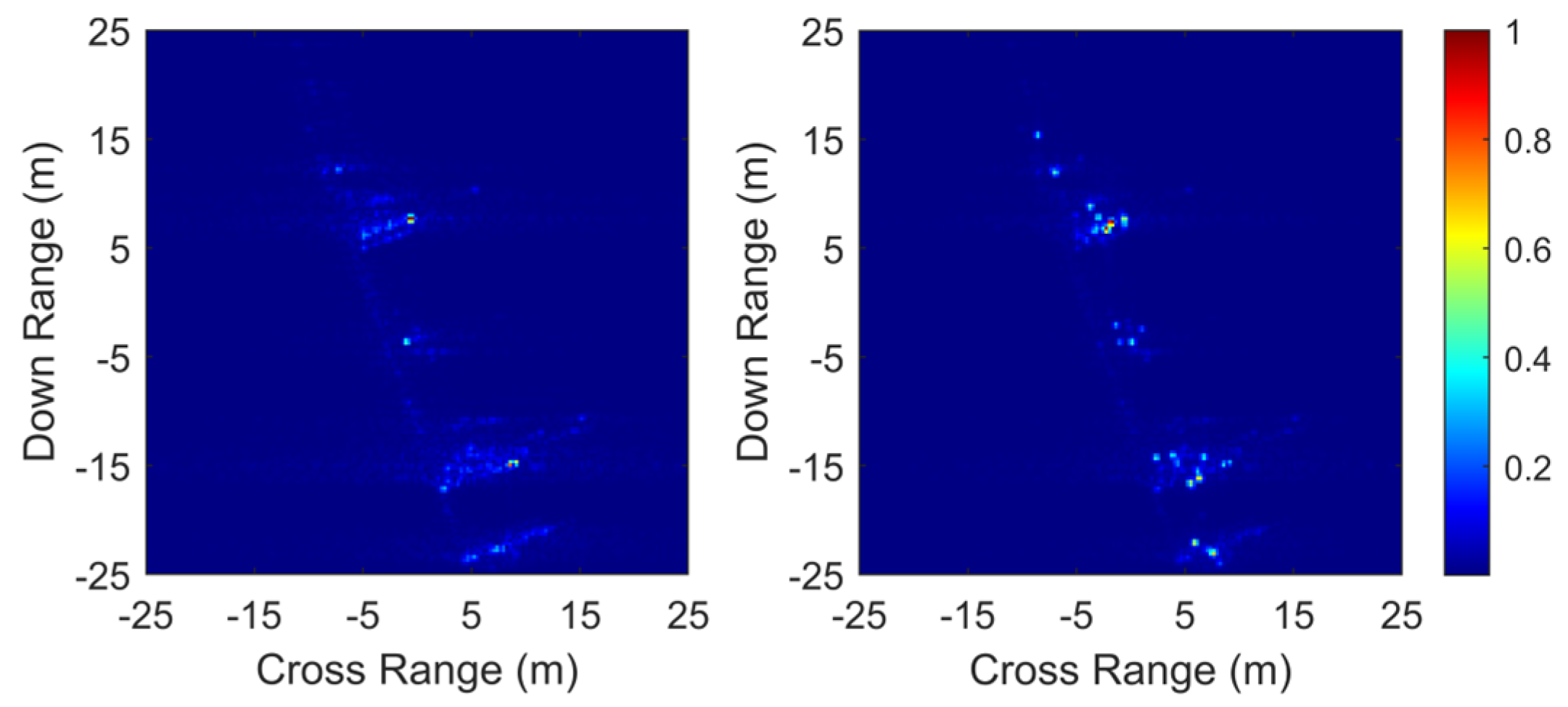
Figure 9.
Comparison between simulated (left) and reconstructed (right) SAR images for marine fishing ship. The similarity is 93.03%.
Figure 9.
Comparison between simulated (left) and reconstructed (right) SAR images for marine fishing ship. The similarity is 93.03%.
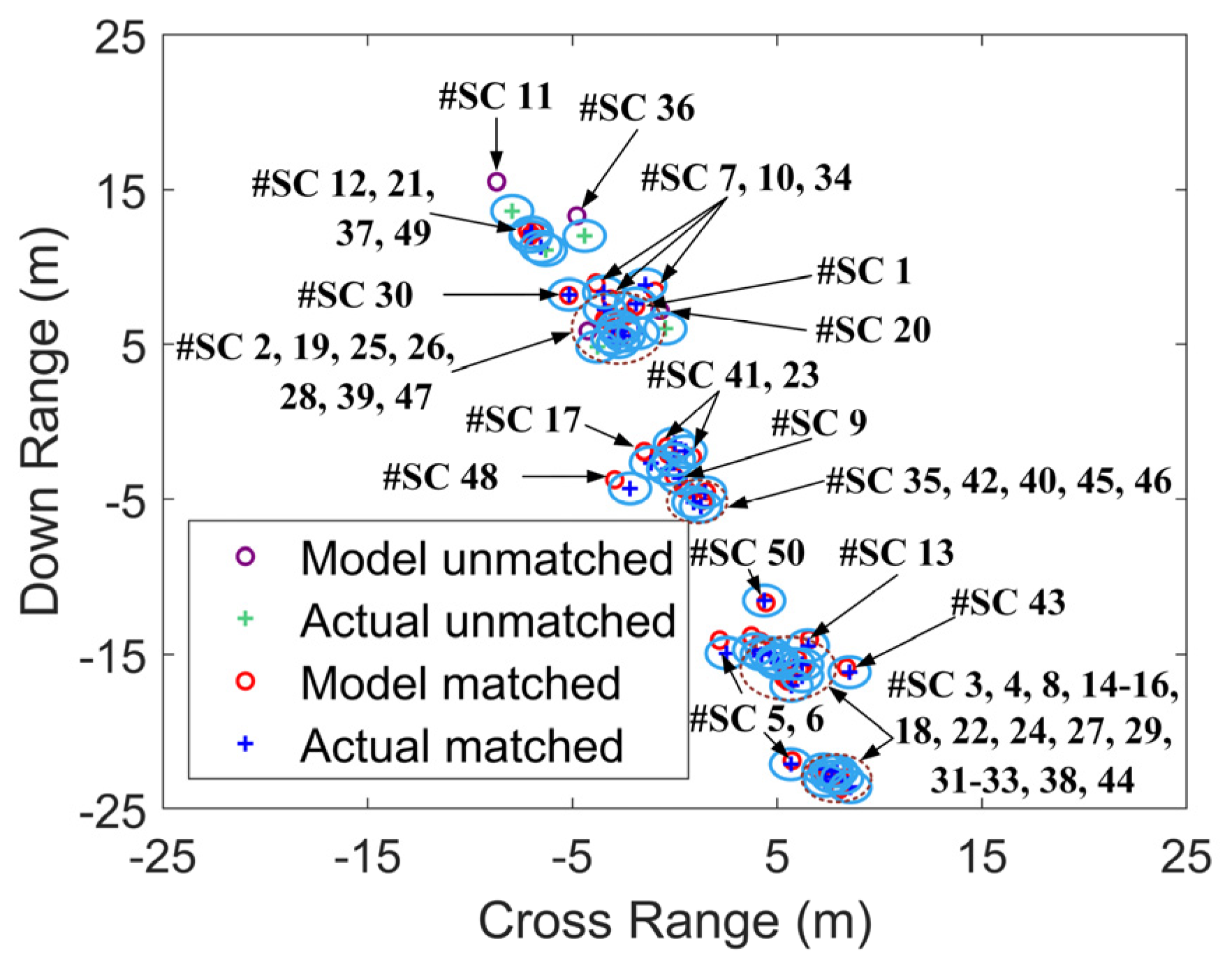
Figure 10.
Matching results of the simulated image’s inverse-extracted SC positions and the forward-calculated SC positions for marine fishing ship. The position-matching rate is 92.0%.
Figure 10.
Matching results of the simulated image’s inverse-extracted SC positions and the forward-calculated SC positions for marine fishing ship. The position-matching rate is 92.0%.
Figure 11.
Comprehensive comparison of forward model reconstruction RCS and simulation results of ships in free space and on rough sea surface. The RMSEs are 2.17 dBsm and 2.18 dBsm, respectively.
Figure 11.
Comprehensive comparison of forward model reconstruction RCS and simulation results of ships in free space and on rough sea surface. The RMSEs are 2.17 dBsm and 2.18 dBsm, respectively.
Figure 12.
The temporal variations in the roll, pitch, and heave motions of the fishing ship. (a) Roll, (b) pitch, and (c) heave.
Figure 12.
The temporal variations in the roll, pitch, and heave motions of the fishing ship. (a) Roll, (b) pitch, and (c) heave.
Figure 13.
Reconstructed SAR images of SCs of fishing ships at sea under different times. (a) 1.0 s. (b) 1.5 s. (c) 2.0 s. (d) 2.5 s.
Figure 13.
Reconstructed SAR images of SCs of fishing ships at sea under different times. (a) 1.0 s. (b) 1.5 s. (c) 2.0 s. (d) 2.5 s.
Figure 14.
Schematic of the aircraft carrier at sea.
Figure 14.
Schematic of the aircraft carrier at sea.
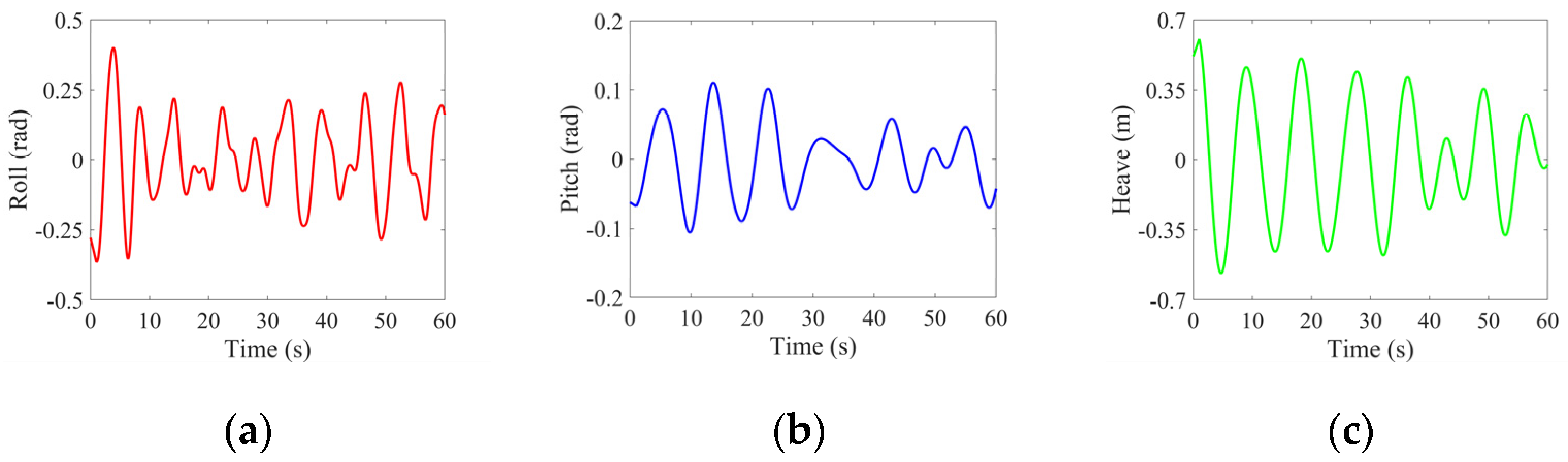
Figure 15.
The temporal variations in the roll, pitch, and heave motions of the aircraft carrier, with a ship speed of 0 m/s, wind speed of 10 m/s, and wind direction at 60°. (a) Roll, (b) pitch, and (c) heave.
Figure 15.
The temporal variations in the roll, pitch, and heave motions of the aircraft carrier, with a ship speed of 0 m/s, wind speed of 10 m/s, and wind direction at 60°. (a) Roll, (b) pitch, and (c) heave.
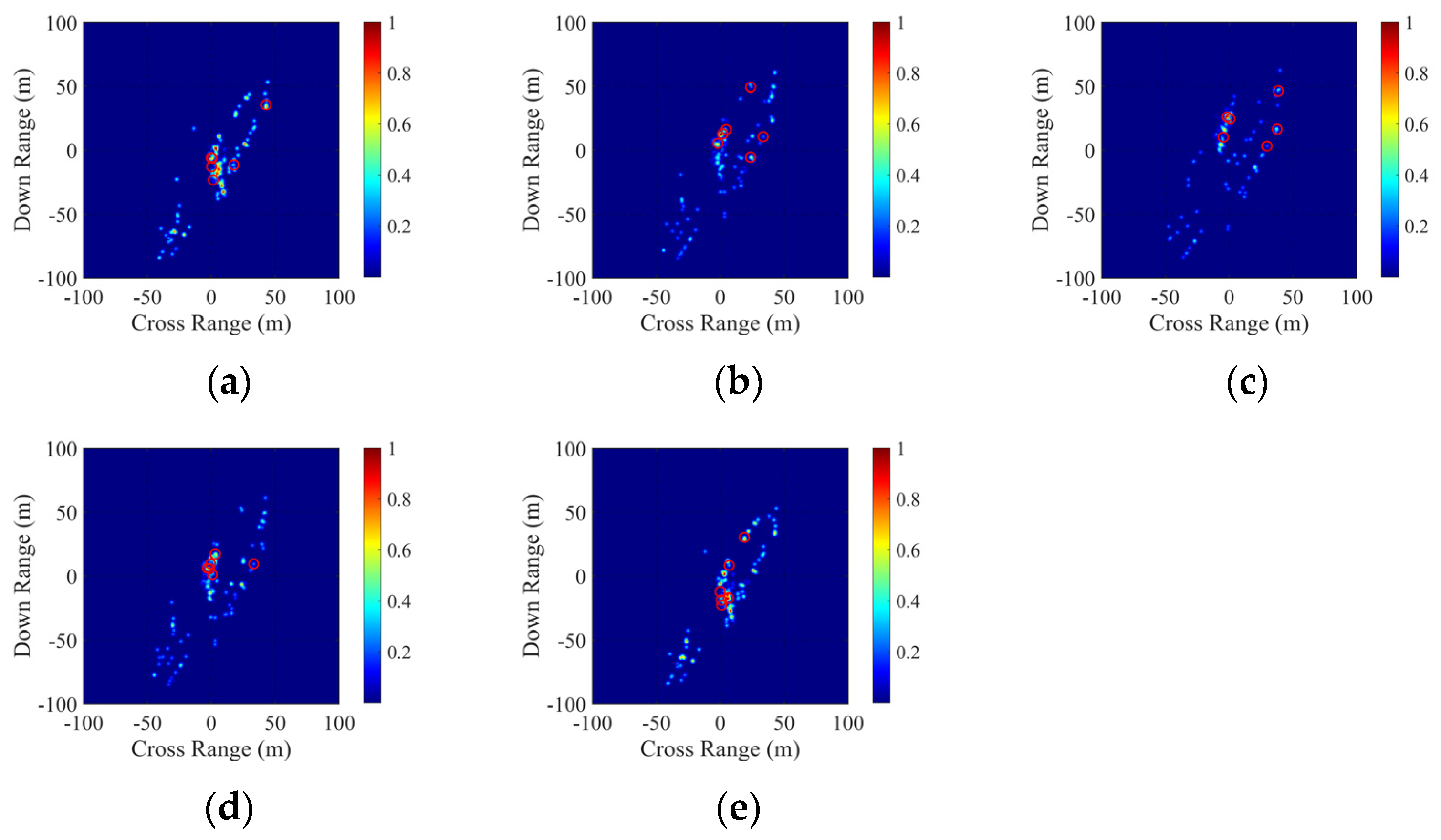
Figure 16.
Reconstructed SAR images of SCs of aircraft carrier at sea under different times. (a) 1.0 s. (b) 4.0 s. (c) 7.0 s. (d) 10.0 s.
Figure 16.
Reconstructed SAR images of SCs of aircraft carrier at sea under different times. (a) 1.0 s. (b) 4.0 s. (c) 7.0 s. (d) 10.0 s.
Figure 17.
The temporal variations in the roll, pitch, and heave motions of the aircraft carrier, with a ship speed of 0 m/s, wind speed of 10 m/s, and wind direction at 90°. (a) Roll, (b) pitch, and (c) heave.
Figure 17.
The temporal variations in the roll, pitch, and heave motions of the aircraft carrier, with a ship speed of 0 m/s, wind speed of 10 m/s, and wind direction at 90°. (a) Roll, (b) pitch, and (c) heave.
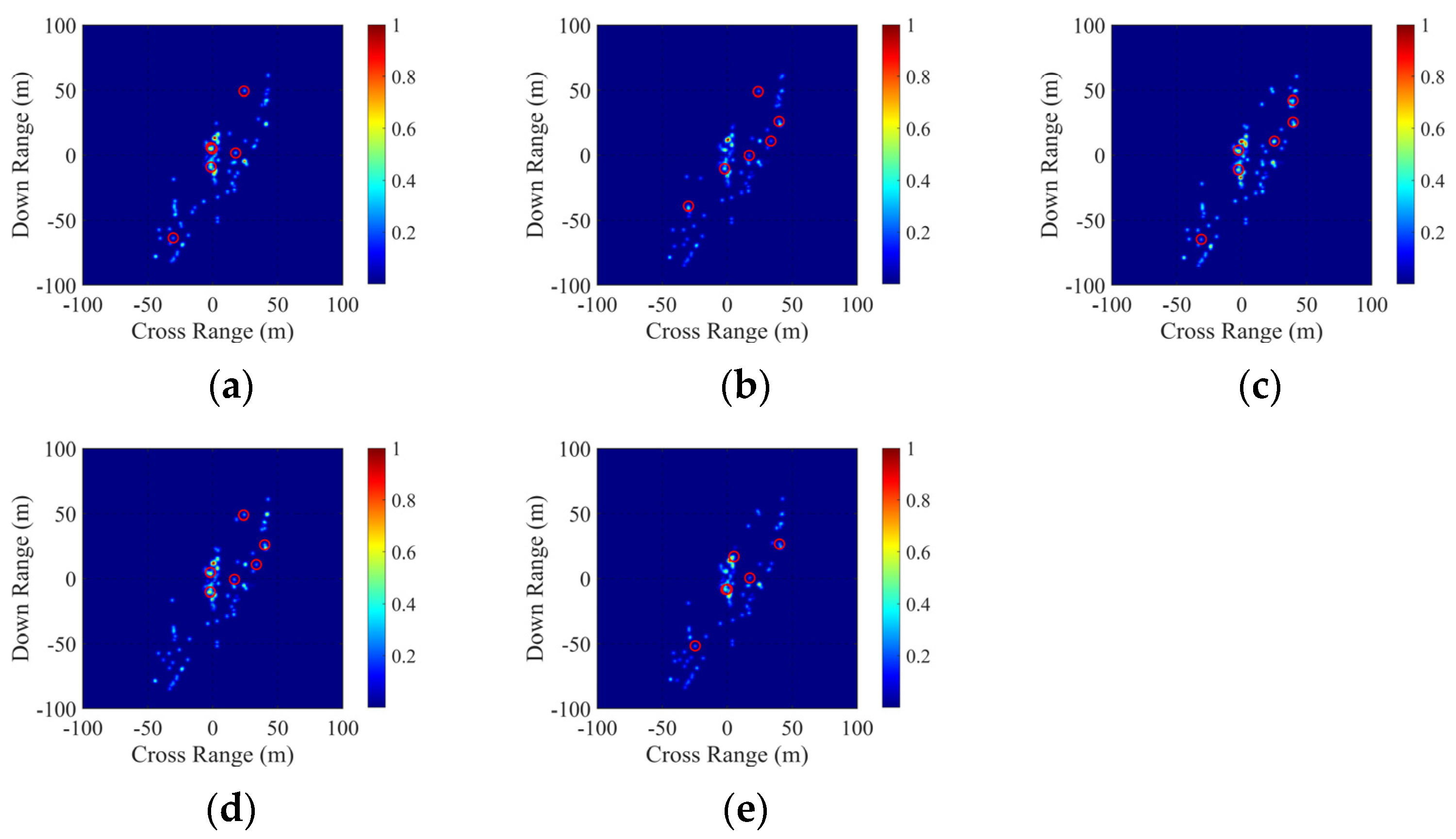
Figure 18.
Reconstructed SAR images at different instances within one cycle under roll motion conditions. (a) 1.0 s. (b) 2.375 s. (c) 3.75 s. (d) 5.125 s. (e) 6.5 s.
Figure 18.
Reconstructed SAR images at different instances within one cycle under roll motion conditions. (a) 1.0 s. (b) 2.375 s. (c) 3.75 s. (d) 5.125 s. (e) 6.5 s.
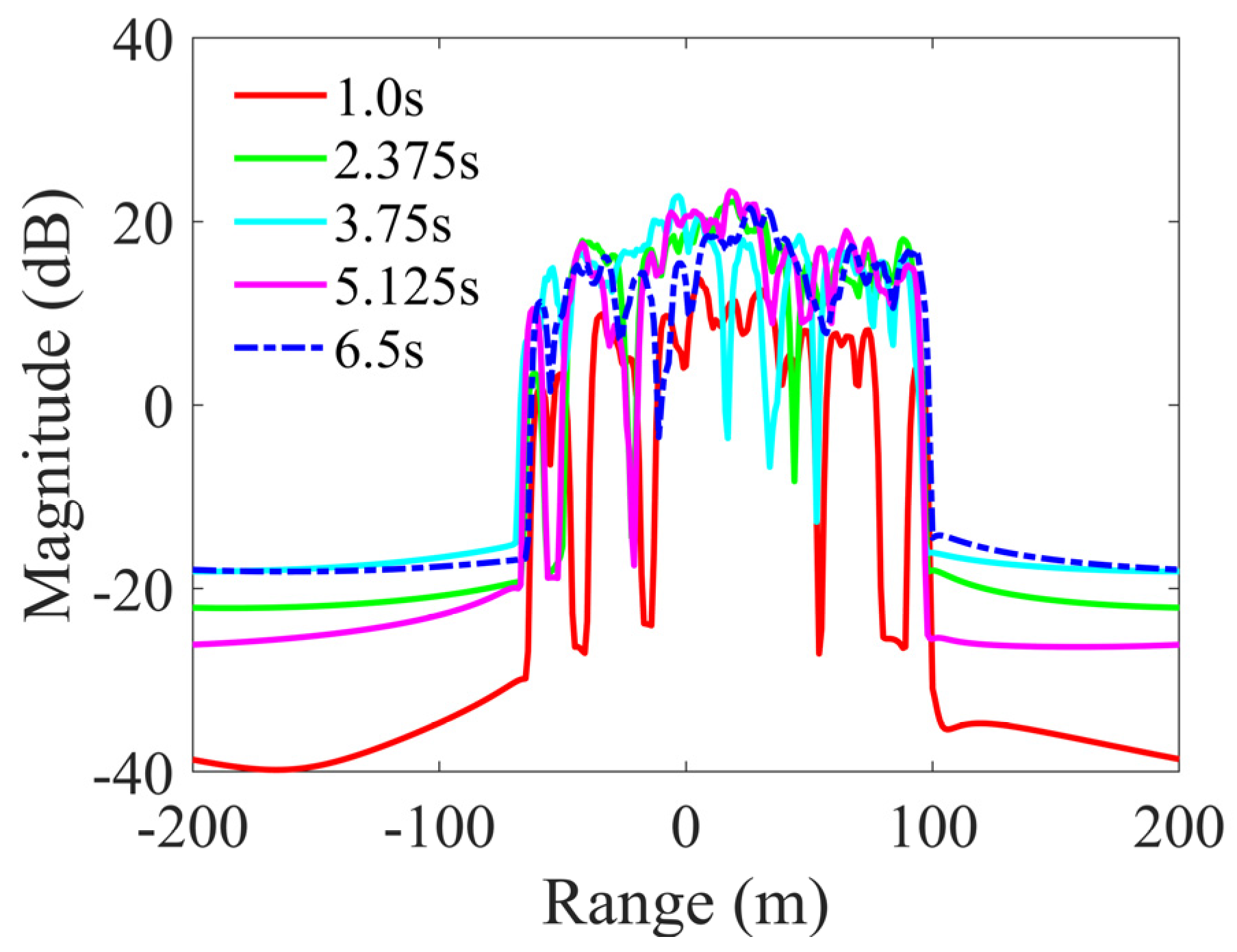
Figure 19.
Reconstructed HRRPs at various times within a roll cycle.
Figure 19.
Reconstructed HRRPs at various times within a roll cycle.
Figure 20.
Reconstructed SAR images at different instances within one cycle under pitch-motion conditions. (a) 1.0 s. (b) 3.1 s. (c) 5.2 s. (d) 7.3 s. (e) 9.4 s.
Figure 20.
Reconstructed SAR images at different instances within one cycle under pitch-motion conditions. (a) 1.0 s. (b) 3.1 s. (c) 5.2 s. (d) 7.3 s. (e) 9.4 s.
Figure 21.
Reconstructed HRRPs at various times within a pitch cycle.
Figure 21.
Reconstructed HRRPs at various times within a pitch cycle.
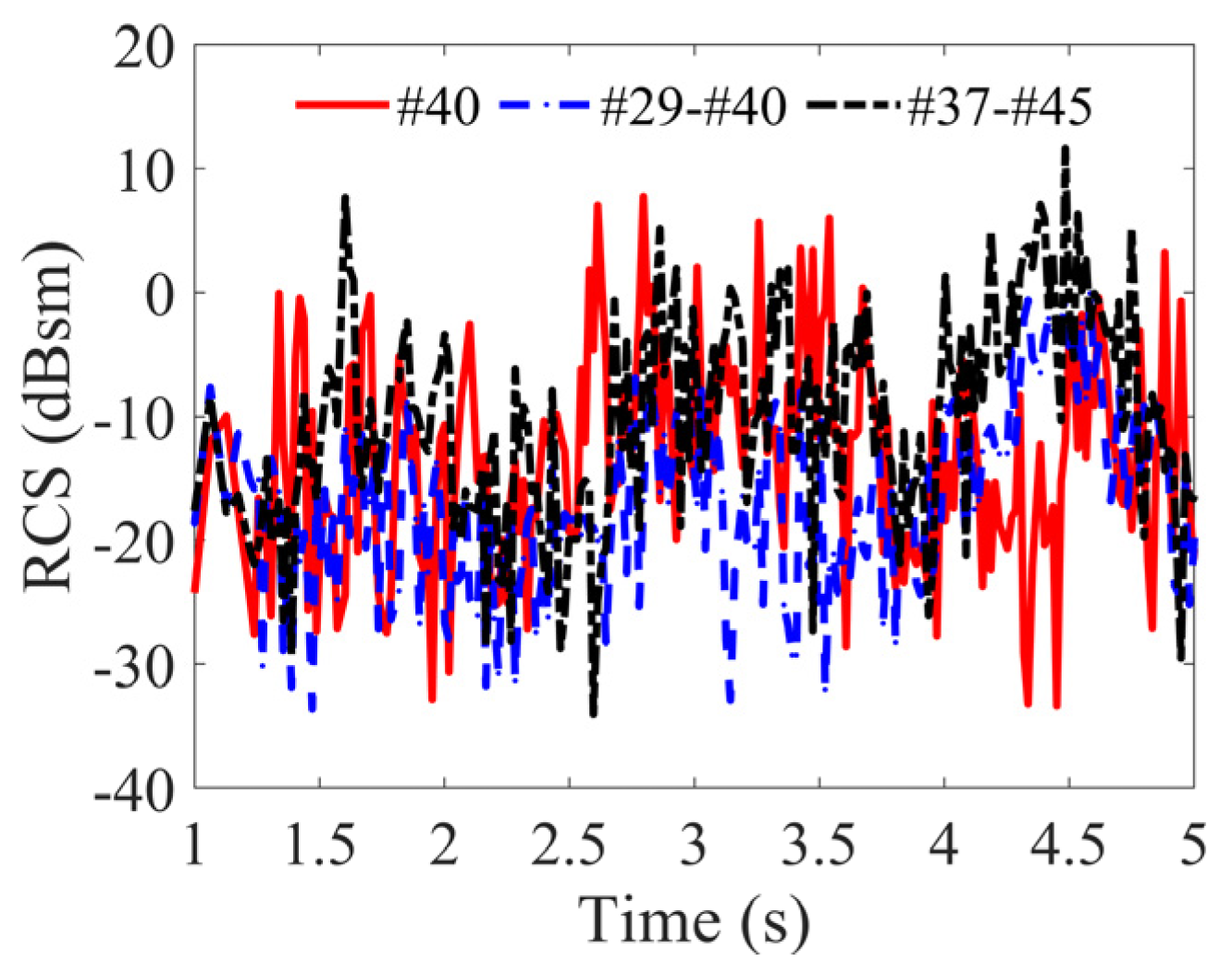
Figure 22.
Temporal evolution of scattering center’s amplitude parameters.
Figure 22.
Temporal evolution of scattering center’s amplitude parameters.
Figure 23.
Temporal evolution of scattering center’s three-dimensional position parameters. (a) Position x, (b) position y, (c) position z.
Figure 23.
Temporal evolution of scattering center’s three-dimensional position parameters. (a) Position x, (b) position y, (c) position z.
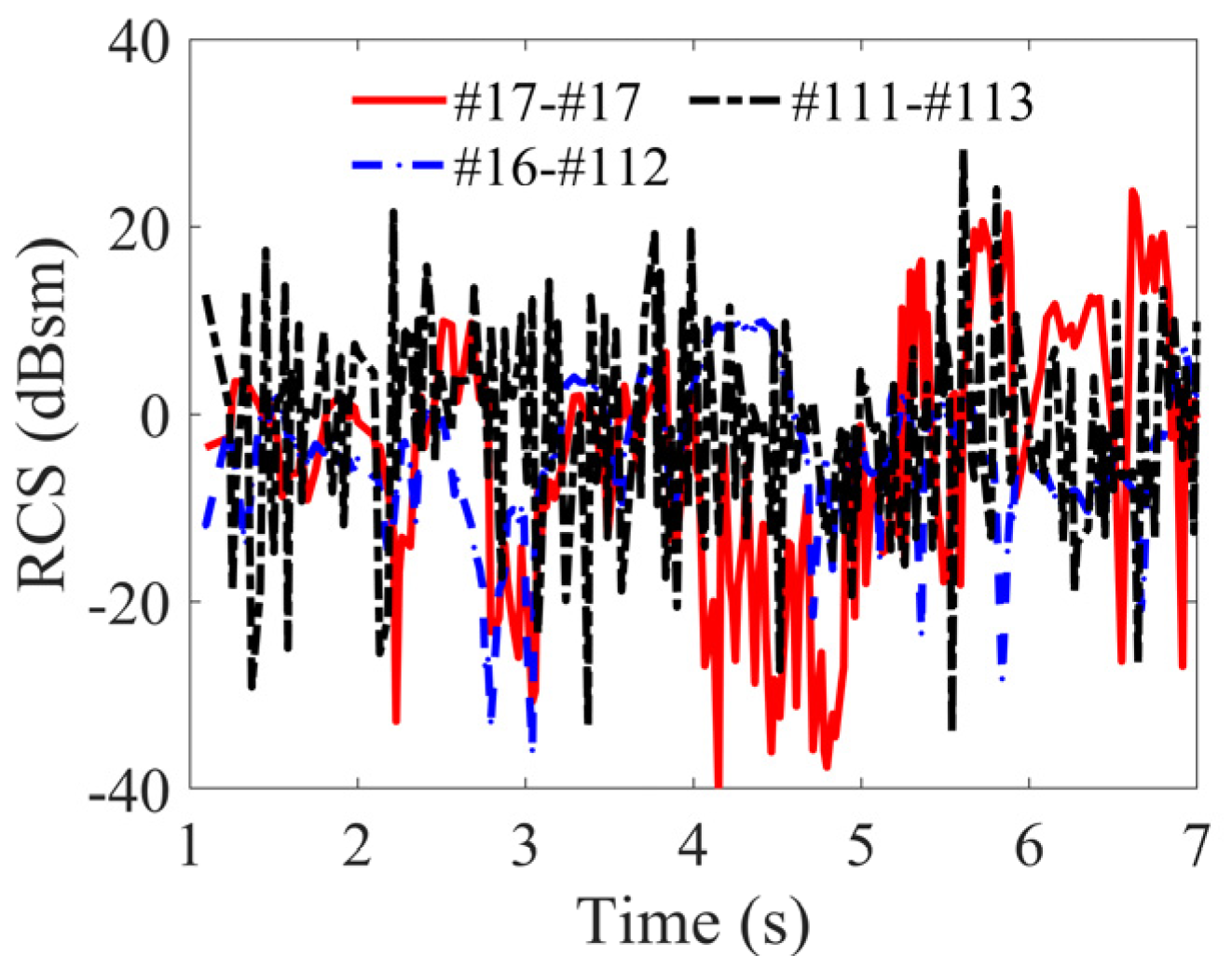
Figure 24.
Temporal evolution of scattering center’s amplitude parameters.
Figure 24.
Temporal evolution of scattering center’s amplitude parameters.
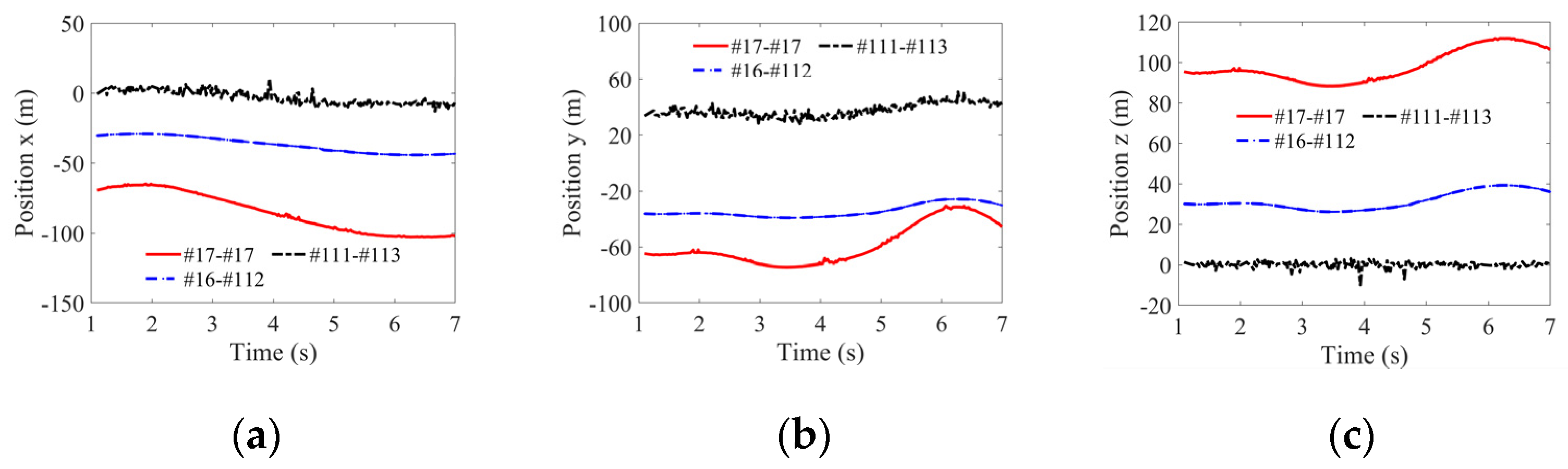
Figure 25.
Temporal evolution of scattering center’s three-dimensional position parameters. (a) Position x, (b) position y, (c) position z.
Figure 25.
Temporal evolution of scattering center’s three-dimensional position parameters. (a) Position x, (b) position y, (c) position z.
Table 1.
Forward-modeling results of strong SCs from marine fishing ship at f = 9.65 GHz.
Table 1.
Forward-modeling results of strong SCs from marine fishing ship at f = 9.65 GHz.
| No. | Index Series | Scattering Source | RCS
(dBsm) | | (m) | 3-D Positions (m) |
|---|
| 1 | 20–45 | Head antenna base (20)–Rough Sea surface (45) | 0.8 | 0.5 | 0 | (7.31,−0.53,−2.5) |
| 2 | 5–10 | Mid-Deck (5)–Forward compartment (10) | −0.93 | 0.5 | 0 | (8.0,−0.28,1.5) |
| 3 | 44–45 | Stern of the ship (44)–Rough Sea surface (45) | −2.24 | 0.5 | 0 | (−25.04,0.85,0.25) |
| 4 | 31–34 | Aft deck (31)–Aft compartment (34) | −2.31 | 0.5 | 0 | (−17.0,−0.61,3.0) |
| 5 | 43–45 | Stern (43)–Rough Sea surface (45) | −3.12 | 0.5 | 0 | (−23.6,2.21,−0.19) |
| 6 | 32–45 | Aft cabin side (32)–Rough Sea surface (45) | −6.68 | 0.5 | 0 | (−15.27,3.13,−2.23) |
| 7 | 22–45 | Head antenna (22)–Rough Sea surface (45) | −6.75 | 0.5 | 0 | (9.92,0.68,−0.91) |
| 8 | 33–36 | Aft cabin top (33)–Antenna base (36) | −7.03 | 0.5 | 0 | (−16.0,−0.14,6.8) |
| 9 | 5–25 | Mid-Deck (5)–Crane base (25) | −7.39 | 0.5 | 0 | (−3.0,1.12,1.5) |
| 10 | 21–22 | Head antenna (21)–Antenna base (22) | −7.5 | 0.5 | 0 | (10.73,−0.42,6.24) |
| 11 | 40–45 | Hull (#40)–Rough Sea surface (#45) | −7.56 | 0.5 | 0 | (17.56,3.29,−2.73) |
| 12 | 3–9 | Bow (3)–Head cabin side (9) | −7.81 | 0.5 | 0 | (15.0,2.4,2.3) |
| 13 | 36–45 | Aft cabin antenna base (36)–Rough Sea surface (45) | −8.33 | 0.5 | 0 | (−15.98,−1.5,0.6) |
| 14 | 36–37 | Aft cabin antenna base (36)–Aft Antenna (#37) | −8.57 | 0.5 | 0 | (−12.62,0.43,8.0) |
| 15 | 34–45 | Aft compartment (34)–Rough Sea surface (#45) | −9.71 | 0.5 | 0 | (−17.1,−0.44,0.22) |
| … | … | … | … | … | … | … |
Table 2.
Imaging parameters of marine fishing ship.
Table 2.
Imaging parameters of marine fishing ship.
| Polarization | HH | Zenith angle | θ |
| Center Frequency | 9.65 GHz | Aspect angle | φ |
| Bandwidth | 0.5 GHz | Angular Spacing | 0.01° |
| Frequency Step | 1.5 MHz | Synthesis Aperture | 3.06° |
| Range Resolution | 0.3 m | Azimuth Resolution | 0.3 m |
Table 3.
Matching results of strong SC positions.
Table 3.
Matching results of strong SC positions.
| NO. | Scattering Center Forward Modeling | Simulated Image’s Inverse-Extracted
SC Position | Position-Matching Error (Resolution Unit) |
|---|
| Index Series | Scattering Source | Forward-Calculated SC Position |
|---|
| 1 | 20–45 | Head antenna base (20)–Rough Sea surface (45) | (1.92,7.47) | (1.9,7.64) | 0.35 |
| 2 | 5–10 | Mid-Deck (5)–Forward compartment (10) | (2.37,6.84) | (1.9,6.73) | 0.94 |
| 3 | 44–45 | Stern of the ship (44)–Rough Sea surface (45) | (−7.42,−22.85) | (−7.69,−22.91) | 0.53 |
| 4 | 31–34 | Aft deck (31)–Aft compartment (34) | (−6.1,−15.96) | (−5.82,−15.62) | 0.66 |
| 5 | 43–45 | Stern (43)–Rough Sea surface (45) | (−5.73,−21.87) | (−5.67,−22.1) | 0.46 |
| 6 | 32–45 | Aft cabin side (32)–Rough Sea surface (45) | (−2.19,−14.09) | (−2.53,−14.33) | 0.48 |
| 7 | 22–45 | Head antenna (22)–Rough Sea surface (45) | (3.85,8.95) | (3.42,8.28) | 0.86 |
| 8 | 33–36 | Aft cabin top (33)–Antenna base (36) | (−5.36,−16.32) | (−5.01,−16.35) | 0.69 |
| 9 | 5–25 | Mid-Deck (5)–Crane base (25) | (0.03,−3.5) | (0.32,−3.03) | 0.95 |
| 10 | 21–22 | Head antenna (21)–Antenna base (22) | (3.13,7.95) | (3.46,8.38) | 0.84 |
| 11 | 40–45 | Hull (#40)–Rough Sea surface (#45) | (8.7,15.5) | (8.94,15.63) | 0.48 |
| 12 | 3–9 | Bow (3)–Head cabin side (9) | (7.06,12.02) | (7.04,11.97) | 0.10 |
| 13 | 36–45 | Aft cabin antenna base (36)–Rough Sea surface (45) | (−6.57,−14.05) | (−6.5,−14.45) | 0.80 |
| 14 | 36–37 | Aft cabin antenna base (36)–Aft Antenna (#37) | (−3.74,−13.83) | (−3.87,−13.71) | 0.26 |
| 15 | 34–45 | Aft compartment (34)–Rough Sea surface (#45) | (−5.99,−15.29) | (−6.22,−15.65) | 0.71 |
Table 4.
Swinging and tilting attitudes of the fishing ship at different moments.
Table 4.
Swinging and tilting attitudes of the fishing ship at different moments.
| Time | Roll | Pitch | Heave |
|---|
| 1 s | 9.06° | 17.88° | −0.10 m |
| 1.5 s | 11.52° | 8.45° | 0.01 m |
| 2.0 s | 11.51° | −7.21° | 0.02 m |
| 2.5 s | −2.7° | −18.80° | 0.02 m |
Table 5.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 1.0 s.
Table 5.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 1.0 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | Hull (#40)–Rough Sea surface (#45) | 14.15 | 0.5 | 0 | (22.07,1.22,−0.17) |
| 2 | Aft Antenna (#37) | −7.05 | 0.5 | 0 | (−9.28,−0.71,9.67) |
| 3 | Tail Antenna (#39)–Baseplate (#38) | −9.69 | 0.5 | 0 | (−22.10,−0.56,3.26) |
| 4 | Tail Antenna (#39) | −9.88 | 0.5 | 0 | (−22.05,−0.61,4.61) |
| 5 | Rough Sea surface (#45) | −10.71 | 0.5 | 0 | (−0.57,−2.27,−0.02) |
| 6 | Crane Boom (#28)–Crane Bracket (#30) | −19.56 | 0.5 | 0 | (−1.57,−1.20,6.19) |
Table 6.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 1.5 s.
Table 6.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 1.5 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | Hull (#40)–Rough Sea surface (#45) | 8.16 | 0.5 | 0 | (22.05,1.53,−0.15) |
| 2 | Rough Sea surface (#45) | 7.38 | 0.5 | 0 | (−0.53,−2.28,−0.02) |
| 3 | Tail Antenna (#39)–Baseplate (#38) | −10.36 | 0.5 | 0 | (−23.72,−0.52,3.37) |
| 4 | Crane Bracket (#30) | −18.48 | 1 | 0 | (−2.78,−1.78,6.28) |
| 5 | Tail Antenna (#39) | −21.45 | 0 | 0 | (−23.72,−0.66,4.91) |
| 6 | Aft Antenna (#37) | −27.53 | 0.5 | 0.19 | (−11.19,−0.48,9.33) |
Table 7.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 2.0 s.
Table 7.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 2.0 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | Hull (#40)–Rough Sea surface (#45) | 8.09 | 0.5 | 0 | (21.92,1.11,−0.24) |
| 2 | Rough Sea surface (#45) | 7.09 | 0.5 | 0 | (−0.51,−2.27,−0.02) |
| 3 | Tail Antenna (#39)–Baseplate (#38) | −10.66 | 0.5 | 0 | (−25.30,−1.24,3.24) |
| 4 | Tail Antenna (#39) | −15.92 | 0 | 0 | (−25.15,−0.74,4.96) |
| 5 | Forecastle Antenna (#12) | −18.54 | 0 | 0 | (9.97,−1.02,5.43) |
| 6 | Aft Antenna (#37) | −23.53 | 0 | 0.19 | (−13.78,−1.58,9.19) |
Table 8.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 2.5 s.
Table 8.
Parameters and sources of strong scattering centers from fishing ships at sea, at t = 2.5 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | Hull (#40)–Rough Sea surface (#45) | 10.11 | 0.5 | 0 | (20.47,2.03,−0.08) |
| 2 | Rough Sea surface (#45) | 2.98 | 0.5 | 0 | (−0.45,−2.27,−0.02) |
| 3 | Mid-Deck (#5)–Crane Base (#24) | −10.57 | 0.5 | 0 | (−2.04,2.07,1.42) |
| 4 | Aft Antenna (#37) | −10.81 | 0 | 0 | (−15.03,0.45,9.28) |
| 5 | Aft Deck (#31)–Aft Antenna Base (#38) | −11.02 | 0.5 | 0 | (−23.69,0.07,2.97) |
| 6 | Tail Antenna (#39) | −13.38 | 0 | 0 | (−25.03,0.19,5.04) |
Table 9.
Swinging and tilting attitudes of the aircraft carrier at different moments.
Table 9.
Swinging and tilting attitudes of the aircraft carrier at different moments.
| Time | Roll | Pitch | Heave |
|---|
| 1.0 s | 3.3° | 10.3° | −0.04 m |
| 4.0 s | 7.29° | 0.84° | 0.0 m |
| 7.0 s | −6.98° | −7.83° | 0.02 m |
| 10.0 s | −7.88° | −18.8° | 0.0 m |
Table 10.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 1.0 s.
Table 10.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 1.0 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#102)–(#113) | 22.93 | 0.5 | 0 | (−120.30,27.33,0.33) |
| 2 | (#63)–(#112) | 16.69 | 0.5 | 0 | (−47.06,−34.45,18.41) |
| 3 | (#37)–(#71) | 16.48 | 0.5 | 0 | (−77.76,−37.00,26.17) |
| 4 | (#17)–(#51) | 15.41 | 0.5 | 0 | (−35.25,−31.28,35.89) |
| 5 | (#10)–(#112) | 14.09 | 0.5 | 0 | (−41.09,−31.76,18.53) |
| 6 | (#17)–(#112) | 13.18 | 0.5 | 0 | (−35.18,−30.58,19.01) |
Table 11.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 4.0 s.
Table 11.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 4.0 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#42)–(#112) | 33.20 | 0.5 | 0.77 | (−41.55,−28.90,17.20) |
| 2 | (#84)–(#113) | 24.61 | 0.5 | 0.16 | (156.55,11.54,−0.57) |
| 3 | (#95)–(#106) | 23.28 | 0.5 | 4.03 | (77.48,−33.29,13.20) |
| 4 | (#48) | 19.69 | 0.5 | 0 | (−39.94,−30.69,28.87) |
| 5 | (#1)–(#103) | 18.62 | 0.5 | 0 | (−144.96,15.13,17.71) |
| 6 | (#57)–(#112) | 18.23 | 0.5 | 0 | (−68.26,−31.78,16.79) |
Table 12.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 7.0 s.
Table 12.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 7.0 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#12)–(#113) | 16.37 | 0.5 | 0 | (−43.34,−31.08,24.91) |
| 2 | (#5) | 14.01 | 0.5 | 0 | (93.57,−22.70,18.91) |
| 3 | (#14)–(#51) | 13.26 | 0.5 | 0 | (−47.87,−27.19,39.94) |
| 4 | (#3) | 12.07 | 0.5 | 0 | (−161.54,−29.39,21.04) |
| 5 | (#17) | 11.70 | 0.5 | 0.64 | (−49.19,−24.13,42.06) |
| 6 | (#29)–(#51) | 9.62 | 0.5 | 0 | (−62.08,−28.42,41.53) |
Table 13.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 10.0 s.
Table 13.
Parameters and sources of strong scattering centers from aircraft carrier at sea, at t = 10.0 s.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#1) | 18.36 | 0 | 0.12 | (−142.29,19.55,14.20) |
| 2 | (#16)–(#41) | 9.76 | 0.5 | 0 | (−48.61,−26.19,32.20) |
| 3 | (#17) | 9.26 | 0.5 | 0 | (−55.82,−23.80,42.10) |
| 4 | (#29)–(#62) | 8.93 | 0.5 | 0 | (−75.18,−25.67,56.51) |
| 5 | (#50) | 8.78 | 0.5 | 0 | (−50.75,−24.03,39.18) |
| 6 | (#80)–(#113) | 8.63 | 0.5 | 0 | (−47.87,38.29,−1.84) |
Table 14.
Attitude changes of the aircraft carrier within one roll cycle.
Table 14.
Attitude changes of the aircraft carrier within one roll cycle.
| Time | 1 s | 2.375 s | 3.75 s | 5.125 s | 6.5 s |
| Deviation Angle | −21.00° | 0.73° | 22.75° | 3.18° | −19.90° |
Table 15.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 1.0 s, within the roll cycle.
Table 15.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 1.0 s, within the roll cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#102) | 32.04 | 0 | 1.95 | (−124.44,−36.51,5.81) |
| 2 | (#12) | 27.37 | 0 | 0.19 | (−37.44,−17.86,47.35) |
| 3 | (#79)–(#111) | 27.25 | 0 | 0.11 | (−4.45,42.32,3.98) |
| 4 | (#41)–(#112) | 23.44 | 0 | 0 | (−39.82,−21.37,30.24) |
| 5 | (#14)–(#112) | 22.99 | 0 | 0.04 | (−42.34,−24.72,31.84) |
| 6 | (#8)–(#41) | 22.79 | 0 | 0 | (−39.61,−22.37,37.59) |
Table 16.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 2.375 s, within the roll cycle.
Table 16.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 2.375 s, within the roll cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#89) | 23.25 | 0.5 | 38.57 | (−47.81,32.47,19.01) |
| 2 | (#17)–(#112) | 21.48 | 0.5 | 1.37 | (−42.55,−29.16,20.28) |
| 3 | (#24)–(#112) | 20.02 | 0.5 | 0.14 | (−70.25,−28.99,20.30) |
| 4 | (#49)–(#112) | 20.01 | 0.5 | 0 | (−60.46,−30.06,19.99) |
| 5 | (#81)–(#89) | 19.56 | 0.5 | 0.86 | (−90.01,33.15,19.35) |
| 6 | (#2) | 18.74 | 0.5 | 0.13 | (−153.37,−28.34,19.84) |
Table 17.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 3.75 s, within the roll cycle.
Table 17.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 3.75 s, within the roll cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#102) | 32.33 | 0.5 | 0.001 | (−124.62,23.59,30.57) |
| 2 | (#64)–(#112) | 23.25 | 0.5 | 0 | (−58.25,−38.02,6.34) |
| 3 | (#81)–(#89) | 17.36 | 0.5 | 0 | (−89.91,23.15,30.34) |
| 4 | (#56) | 15.00 | 0.5 | 0 | (−68.02,−37.49,12.38) |
| 5 | (#49)–(#52) | 14.21 | 0.5 | 0 | (−49.95,−40.57,20.86) |
| 6 | (#76)–(#104) | 12.75 | 0.5 | 0 | (−158.38,6.47,16.46) |
Table 18.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 5.125 s, within the roll cycle.
Table 18.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 5.125 s, within the roll cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#81)–(#89) | 24.68 | 0.5 | 0.87 | (−90.01,32.27,20.76) |
| 2 | (#40)–(#112) | 22.58 | 0.5 | 0 | (−67.36,−31.28,18.56) |
| 3 | (#39)–(#112) | 21.75 | 0.5 | 0 | (−49.66,−29.94,18.86) |
| 4 | (#41)–(#112) | 19.26 | 0.5 | 0 | (−40.29,−31.24,18.96) |
| 5 | (#42)–(#112) | 18.52 | 0.5 | 0 | (−41.84,−27.33,19.14) |
| 6 | (#49)–(#52) | 16.19 | 0.5 | 0 | (−58.35,−31.72,32.79) |
Table 19.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 6.5 s, within the roll cycle.
Table 19.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 6.5 s, within the roll cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#72)–(#112) | 23.84 | 0 | 0 | (−77.27,−27.07,31.66) |
| 2 | (#12) | 21.12 | 0 | 0.19 | (−37.44,−18.77,47.00) |
| 3 | (#19) | 20.29 | 0 | 0.17 | (−46.17,−24.53,47.74) |
| 4 | (#82)–(#108) | 20.11 | 0 | 0.06 | (−126.74,−25.24,28.54) |
| 5 | (#13) | 20.00 | 0 | 0.61 | (−53.59,−14.87,46.88) |
| 6 | (#8)–(#41) | 19.93 | 0 | 0 | (−39.54,−23.15,37.17) |
Table 20.
Attitude changes of the aircraft carrier within one pitch cycle.
Table 20.
Attitude changes of the aircraft carrier within one pitch cycle.
| Time | 1.0 s | 3.1 s | 5.2 s | 7.3 s | 9.4 s |
| Deviation Angle | −3.58° | 0.70° | 4.12° | 0.94° | −5.73° |
Table 21.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 1.0 s, within the pitch cycle.
Table 21.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 1.0 s, within the pitch cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#84)–(#113) | 20.39 | 0.5 | 0.13 | (155.87,12.98,−0.79) |
| 2 | (#17)–(#112) | 16.68 | 0.5 | 0 | (−44.62,−28.96,20.54) |
| 3 | (#17)–(#51) | 13.88 | 0.5 | 0 | (−44.59,−29.17,37.58) |
| 4 | (#2) | 13.88 | 0.5 | 0 | (−154.34,−28.07,20.31) |
| 5 | (#89)–(#113) | 13.82 | 0.5 | 0.20 | (−22.36,31.88,−0.09) |
| 6 | (#42)–(#112) | 12.91 | 0.5 | 0 | (−43.30,−26.05,20.48) |
Table 22.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 3.1 s, within the pitch cycle.
Table 22.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 3.1 s, within the pitch cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#102) | 36.58 | 0.5 | 0.52 | (−124.66,−29.20,18.67) |
| 2 | (#81)–(#89) | 22.54 | 0.5 | 0.86 | (−89.76,33.40,18.93) |
| 3 | (#89)–(#113) | 17.91 | 0.5 | 0 | (−18.25,32.46,0.12) |
| 4 | (#2) | 17.20 | 0.5 | 0.13 | (−153.12,−28.07,20.16) |
| 5 | (#17)–(#51) | 16.87 | 0.5 | 2.00 | (−41.57,−29.05,37.65) |
| 6 | (#95)–(#106) | 16.46 | 0.5 | 0 | (77.85,−30.79,17.45) |
Table 23.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 5.2 s, within the pitch cycle.
Table 23.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 5.2 s, within the pitch cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#17)–(#51) | 31.02 | 0.5 | 1.73 | (−39.79,−29.25,37.69) |
| 2 | (#84)–(#113) | 29.25 | 0.5 | 0 | (157.19,11.91,0.08) |
| 3 | (#102)–(#113) | 22.13 | 0.5 | 0 | (−124.23,28.46,0.42) |
| 4 | (#17)–(#112) | 21.82 | 0.5 | 0 | (−39.64,−29.05,20.67) |
| 5 | (#102) | 19.49 | 0.5 | 0 | (−123.19,29.20,18.68) |
| 6 | (#110)–(#113) | 16.54 | 0.5 | 0 | (−48.88,35.64,0.32) |
Table 24.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 7.3 s, within the pitch cycle.
Table 24.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 7.3 s, within the pitch cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#17)–(#51) | 45.87 | 0.5 | 1.57 | (−42.08,−29.23,37.70) |
| 2 | (#102) | 29.73 | 0.5 | 0 | (−124.74,29.41,18.62) |
| 3 | (#81)–(#89) | 19.36 | 0.5 | 0.86 | (−89.67,33.40,18.93) |
| 4 | (#17)–(#112) | 18.73 | 0.5 | 1.20 | (−42.05,−28.78,20.67) |
| 5 | (#89)–(#113) | 16.73 | 0.5 | 0 | (−17.38,32.40,0.10) |
| 6 | (#2) | 16.58 | 0.5 | 0.13 | (−153.03,−28.07,20.17) |
Table 25.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 9.4 s, within the pitch cycle.
Table 25.
Parameters and sources of strong scattering centers from aircraft carrier at sea at t = 9.4 s, within the pitch cycle.
| Index | Structure | A (dB) | α | L | (x,y,z) |
|---|
| 1 | (#17)–(#51) | 31.37 | 0.5 | 0 | (−46.46,−29.31,37.65) |
| 2 | (#102) | 14.33 | 0.5 | 0 | (−126.22,29.20,18.66) |
| 3 | (#24)–(#112) | 12.69 | 0.5 | 0 | (−72.67,−28.70,20.46) |
| 4 | (#89)–(#113) | 11.48 | 0.5 | 0 | (−19.28,33.05,−0.43) |
| 5 | (#45) | 11.40 | 0.5 | 0 | (−45.85,−26.46,36.42) |
| 6 | (#99)–(#113) | 10.88 | 0.5 | 0 | (126.84,10.77,−0.93) |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}