



Iterative Low-Poly Building Model Reconstruction from Mesh Soups Based on Contour

Abstract
1. Introduction
- Reduce the total number of contours. We implemented an iterative pipeline to extract vital contours with less redundancy. Moreover, the potential redundant contours will be identified and, then, removed in a post-processing procedure. Fewer contours are used compared to the previous evenly spaced contour-generation strategy [16,17] and redundant removal strategy used in [17].
- Generate compact surfaces between contours. We utilized the planar primitives of the buildings for contour refinement. These planar primitives serve as references and help obtain compact contours while preserving essential details. Connection relationships between these contours are recovered by constructing a contour graph based on multiple bipartite graphs. Based on the contour graph, compact surfaces between adjacent contour nodes will be generated using our contour interpolation method based on polyline splitting, which restricts the total number of generated faces. Our method generates more-compact surfaces without artifacts compared to the existing surface-generation methods, such as bipartite graph matching [16] and minimum circumscribed cuboids [17].
2. Related Work
3. Methods
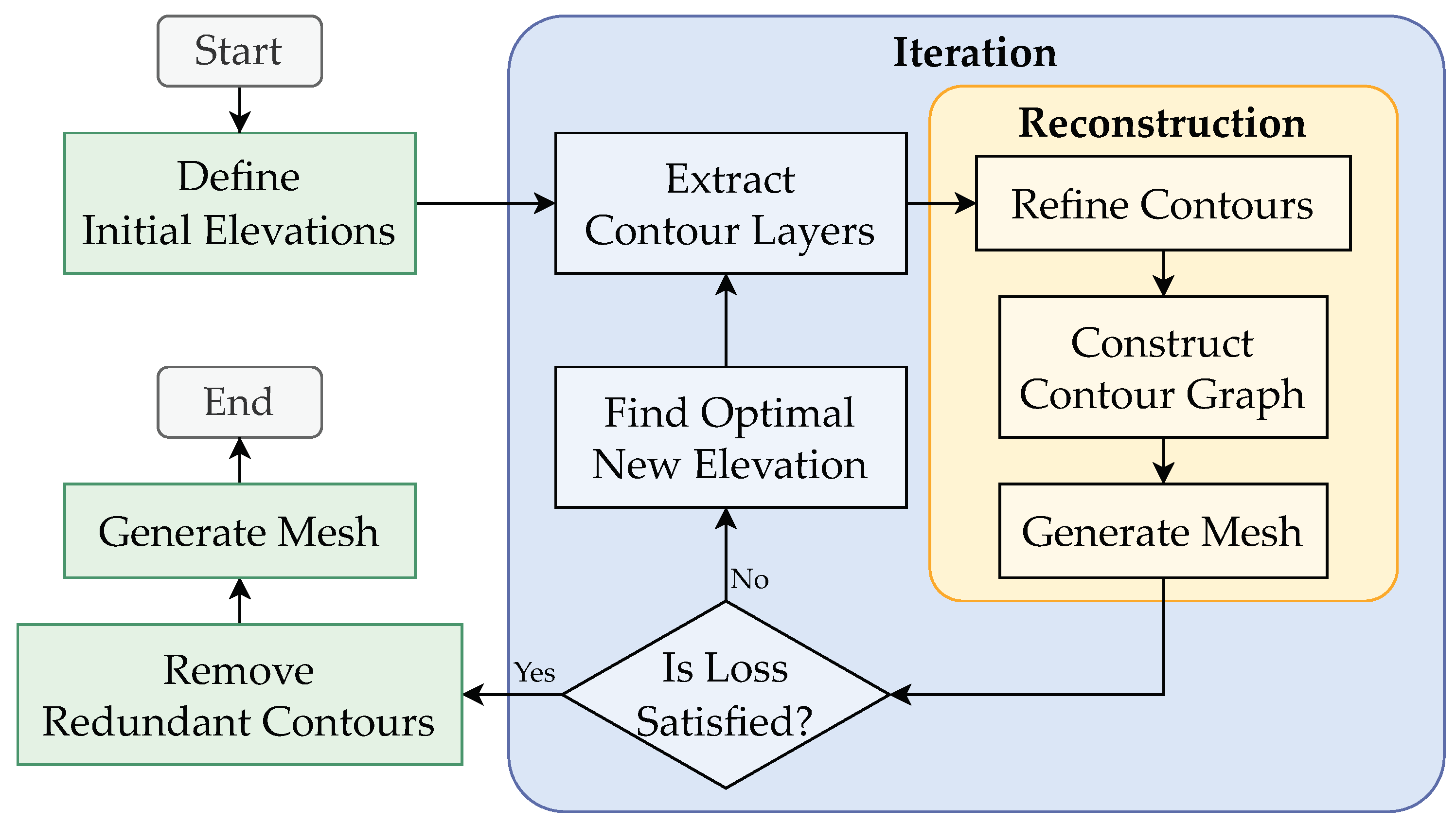
3.1. Overview
- Reduce the total number of contours.As mesh surfaces are generated from the contours, the compactness of the reconstructed meshes is bound to the total number of contours. Wu et al. [16] extract contours on evenly spaced elevations, while most of the contours are redundant as they have similar shapes to their neighbors. Zhang et al. [17] merge consecutive contours if they are identical to avoid duplicated contours. But, this method only handles contours with the same shapes and, thus, is not effective for the redundant contours on gradual slopes such as non-vertical walls and pitched roofs.To reduce redundant contours, our method only extracts vital contour layers (each contour layer contains all the contours on a specific elevation) near crucial elevations identified during the iteration. Moreover, as contours are extracted by layers, part of the contours in the contour layers may be redundant. A post-processing procedure is applied to remove this kind of redundant contour based on our contour interpolation algorithm.
- Generate compact surfaces between contours.
- Raw contours extracted from the mesh soups usually contain a massive number of vertices with noise, while the sharp features (especially corners) are missing. Compact contours that contain only primary vertices with only essential details help obtain low-poly meshes. Traditional polygon simplification methods [29] (e.g., Ramer–Douglas–Peucker (RDP)) can effectively reduce noise and the number of vertices, but they lack the consideration of the sharp features and, thus, usually create undesirable bevels at corners. They also have trouble balancing between simplicity and detail preservation. Zhang et al. [17] provide a method to simplify axis-aligned structures while recovering right-angled corners by minimum circumscribed cuboids. But, this method produces zigzag artifacts on non-axis-aligned structures and fails to recover non-right-angled corners.To simplify contours while preserving essential details and sharp features, we utilized the planar primitives of the buildings. These primitives serve as references in our contour refinement, which produces compact contours with recovered sharp corners.
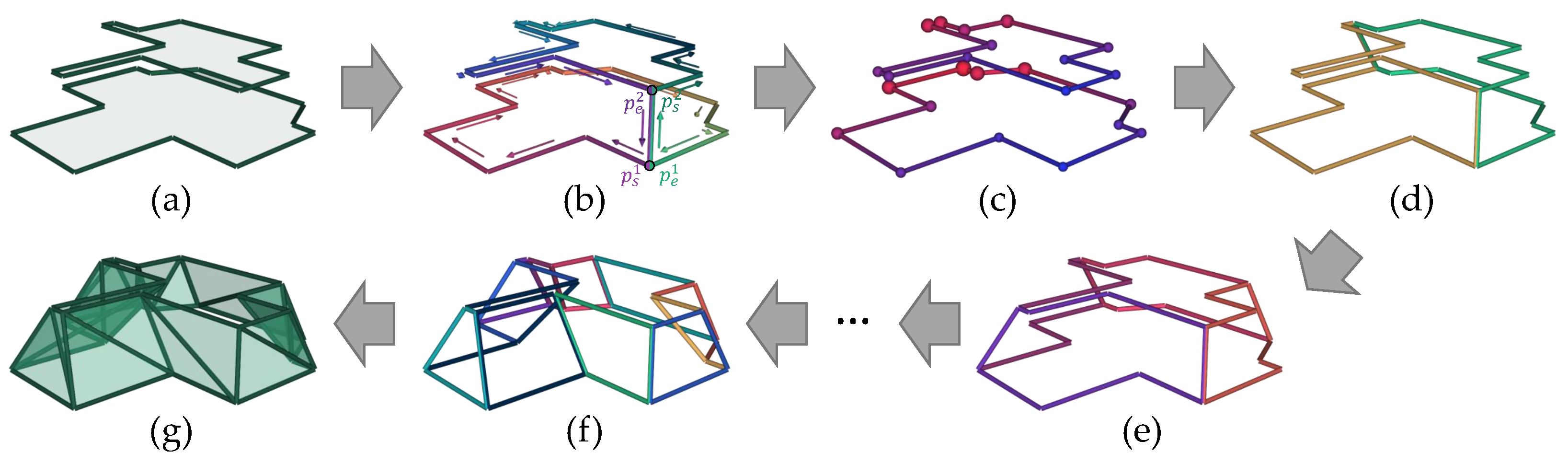
- The connection relationships between contours should be recovered for the surface generation, and the contour graphs are utilized in the previous methods. Each node in the contour graph corresponds to a contour, and the edges indicate the connection between contours. For contours from the DSM, the contour graph falls back to a contour tree and can be constructed straightforwardly [30,31] as these contours follow the restriction that the higher contours must be contained by the lower contours. However, as mesh soups are not under this restriction, the construction of contour graphs is more difficult as the containment relationship between contours can be complicated due to noise or complex topology. For example, the lower contours can be reversely contained by higher contours or they can be only partially overlapped.To construct contour graphs for contours from mesh soups, we decompose the construction of contour graph into that of multiple bipartite graphs. Our method imposes no restriction and is capable of complex containment relationships between contours.
- To generate surfaces between adjacent contour nodes, additional vertices may be inserted, which lead to extra faces and influence the compactness of the result. This challenge becomes more pronounced when the adjacent contours have significantly different shapes. Vertical extrusion and cuboid fitting [17] generate compact surfaces for identically shaped contours found on vertical walls and flat roofs. But, they can hardly generate non-vertical surfaces and, thus, produce staircase-like artifacts on slopes. Wu et al. [16] introduce a method to generate non-vertical surfaces for any pair of adjacent contour nodes by solving a bipartite-graph-matching problem, which successfully recovers the surface of slopes. But, this method resamples contours into dense vertices, which leads to enormous faces in the results. Moreover, an ambiguous topology caused by unsatisfactory matches may appear at sharp corners and complex sections of the contours, which makes it difficult to define the actual surface.We propose a method to generate compact surfaces between adjacent contour nodes by recursive polyline splitting. Our method has no restriction on the shape of the contours and produces surfaces with a restricted number of faces related to the compactness of the input contours.
3.2. Iterative Crucial Elevation Identification
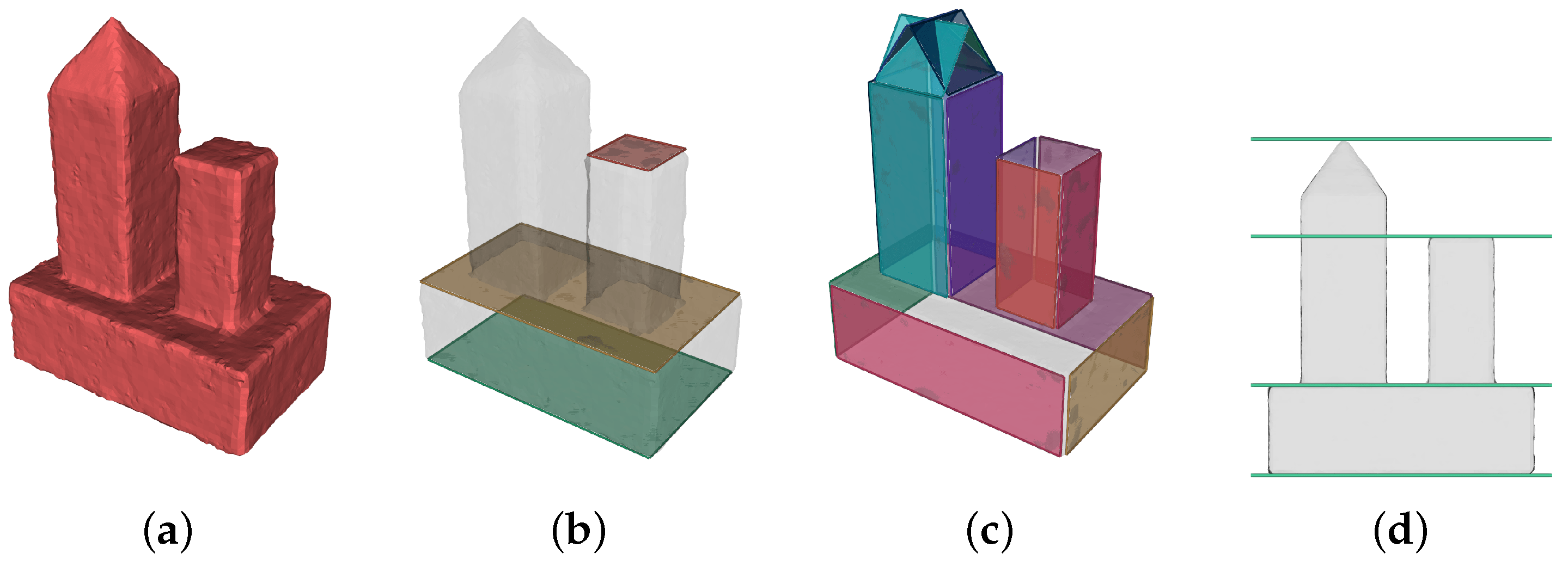
3.3. Contour Layer Extraction
3.4. Low-Poly Mesh Reconstruction
3.4.1. Contour Refinement
3.4.2. Contour Graph Construction And Post-Processing
- Each node has at most one outgoing edge, as a contour can only be contained by at most one contour in the other layer.
- A node should not have both an incoming edge and outgoing edge at the same time, except when these two edges are reverse edges of each other. For the latter circumstance, the two contours contain each other, which is allowed as this indicates that they have an identical shape. Otherwise, a sequence of containment exists, further deriving that one contour is contained by another contour in the same layer, which is impossible.
- 1-0 group: consists of only one node with no edge.
- 1-1 group: consists of two nodes with one or two edges. One of the nodes contains the other node, or the two contours of nodes are identical.
- 1-n group (): consists of 1 node in one layer, n nodes in the other layer, and n edges. The independent 1 node contains all the n nodes in the other layer.
3.4.3. Low-Poly Surface Generation
- 1-0 group: no interior face.
- 1-1 group: interior faces are generated using our contour-interpolation algorithm.
- 1-n group (): contours of the n nodes are vertically extruded (without caps) to fill the in-between space.
4. Results And Evaluation
4.1. Dataset
4.2. Comparison with Previous Methods
4.2.1. Comparison of General Effectiveness
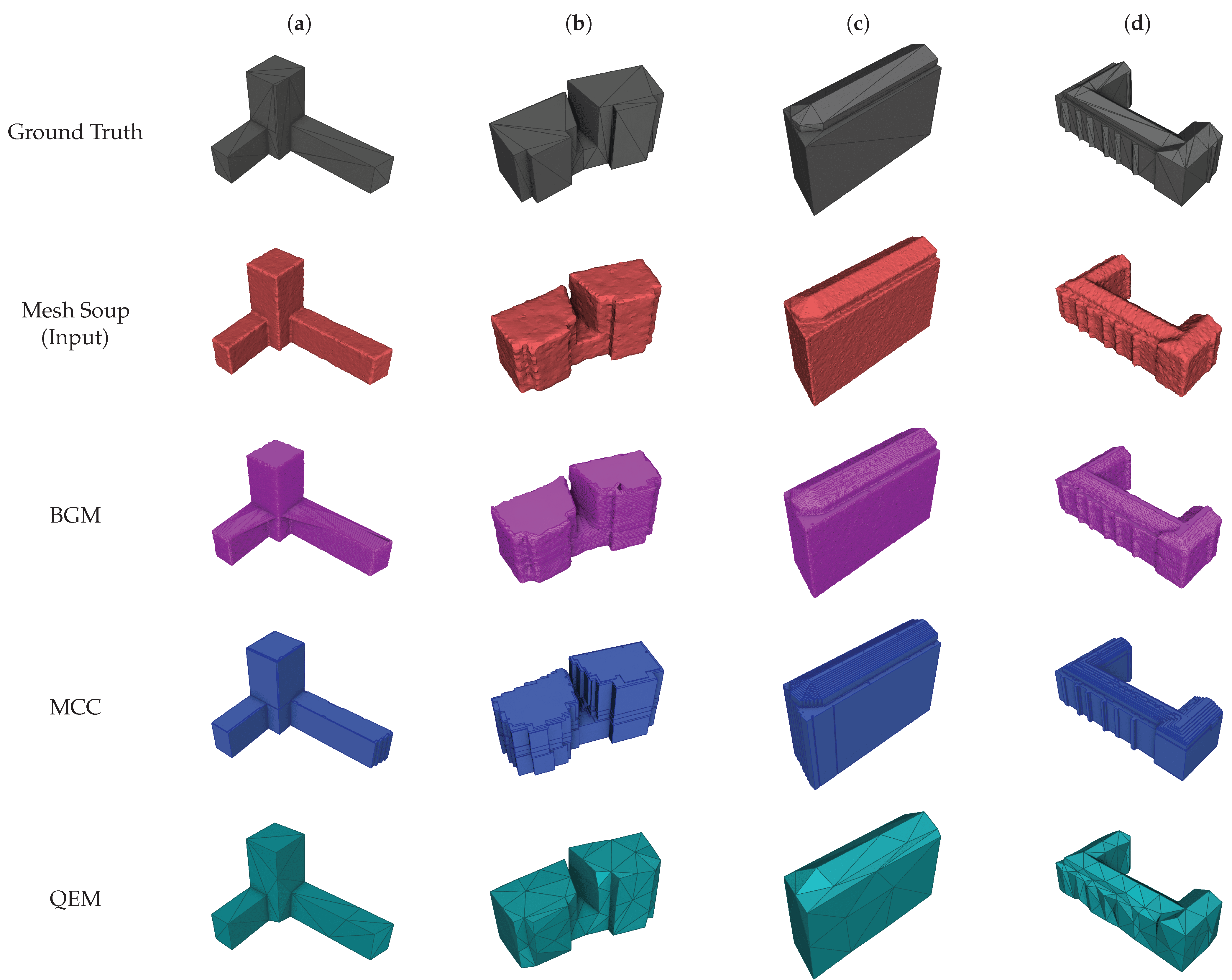
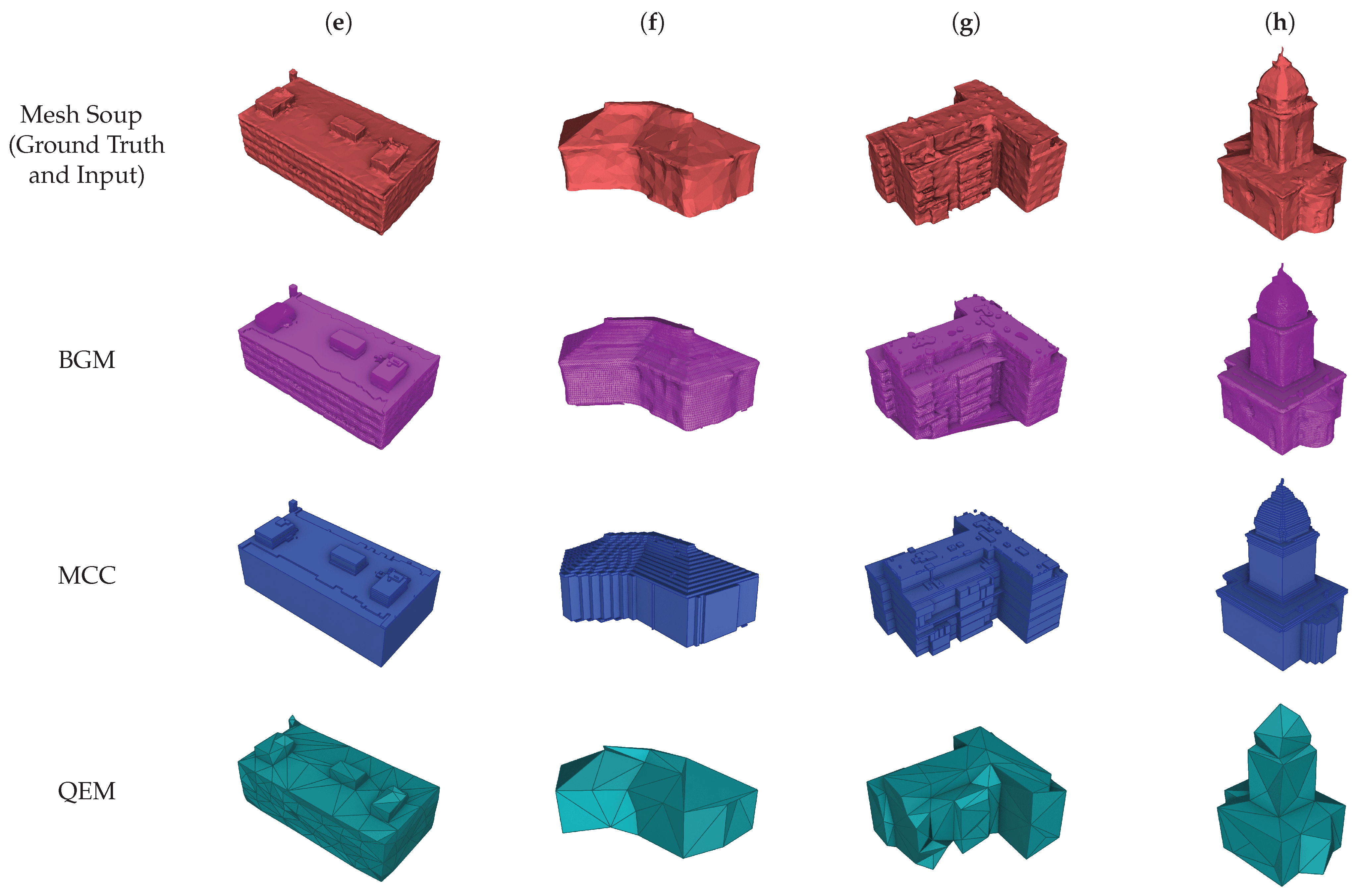
- BGM generates contours on evenly spaced elevations, and each contour is resampled into a fixed number of vertices for surface generation. The reconstructed meshes obtain small losses, but contain a significant number of faces. Moreover, it generates incorrect connections at some dramatically changing elevations (e.g., (a) and (g)), and an ambiguous topology may appear at sharp corners or complicated sections of the contours (see the details in Section 4.2.3).
- MCC produces compact surfaces on axis-aligned structures with the sharp corners recovered (e.g., (a)) under the assumption that the input buildings are comprised of axis-aligned cuboids. However, since MCC lacks an additional strategy to handle non-axis-aligned structures, they tend to be fit by multiple axis-aligned edges, which generate zigzag artifacts and cost more vertices (e.g., (b) and (f)). Meanwhile, the pitched roofs are reconstructed into dense cuboids, leading to staircase structures in the results (e.g., (c), (d), (f), and (h)). Consequently, higher losses and denser faces are present in the results compared to the axis-aligned structures. Additionally, the results of BGM and MCC also suffer from poor contours found on dramatically changing elevations due to the evenly spaced contour-generation strategy (e.g., roofs of (e) and (g)).
- QEM iteratively collapses edges based on the quadric error metric to simplify the mesh soups and is able to reach an arbitrary target number of triangles. Nevertheless, the QEM method is designed for general purposes and does not consider the structure of buildings in its metric, which brings the challenge of balancing between simplicity and detail preservation. The surfaces that are supposed to be planar usually become bumpy, while the sharp corners are over-smoothed (e.g., (b) and (d)). Moreover, the QEM has difficulty preserving the general structure of buildings under an excessive strength of simplification, which significantly increases the loss (e.g., (c) and (f)). Therefore, the QEM method obtains higher losses on average compared to other methods, as shown in the experimental results.
- Our method only generates vital contours and removes redundant contours if they are restorable, thus using much fewer contours compared to other contour-based methods. Our method also prevents directly extracting contours at dramatically changing elevations to avoid poor contours compared to the evenly spaced contour-generation strategy. Furthermore, accurate corners are recovered in our corner-recovery procedure with the guide of planar primitives, and thus, fewer unnecessary bevels at corners are present in our results. Based on the refined contours, compact surfaces can be generated using our contour-interpolation algorithm. Our method, thus, produces low-poly results with small losses compared to other methods.
4.2.2. Comparison of Contour Refinement
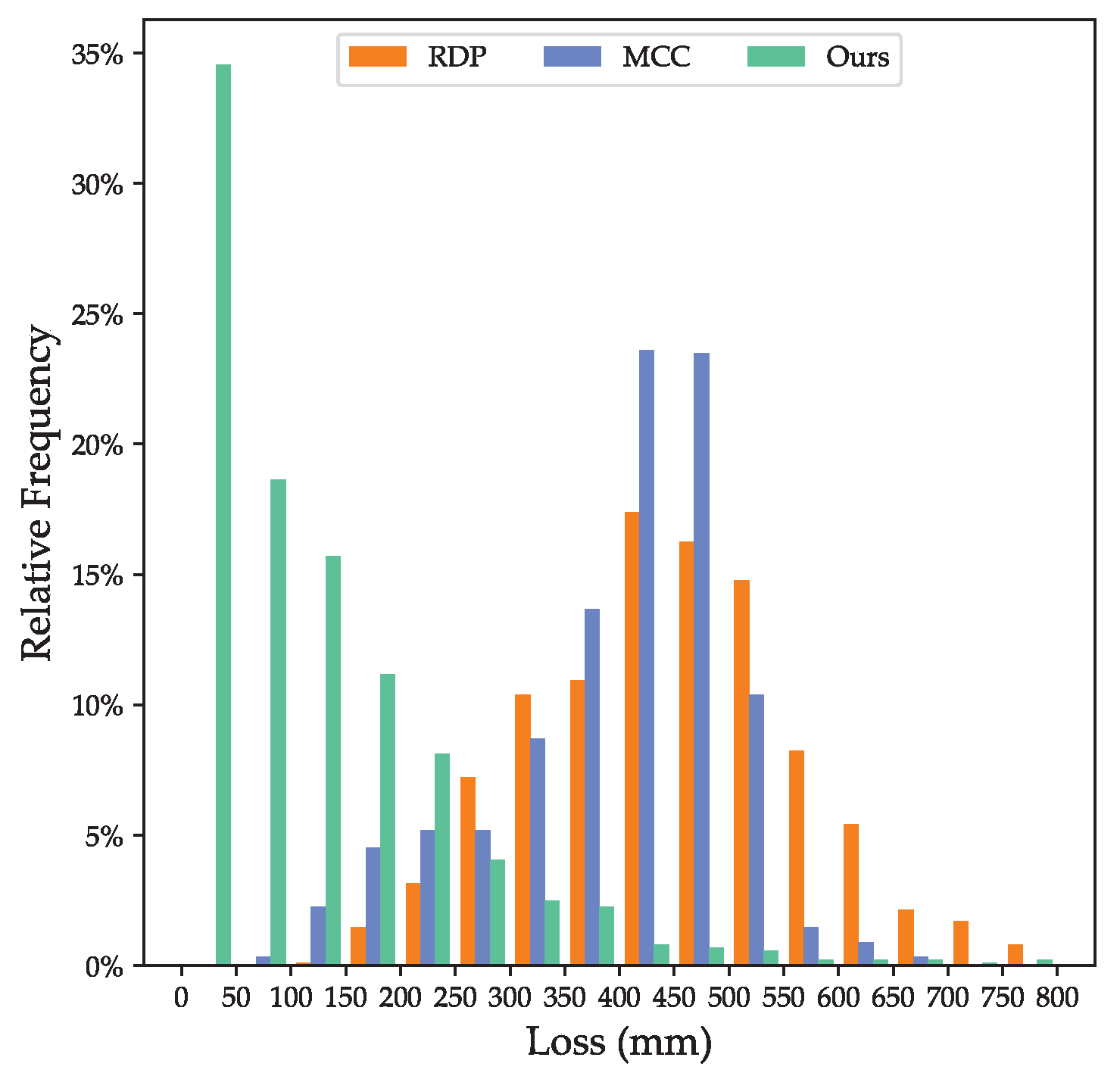
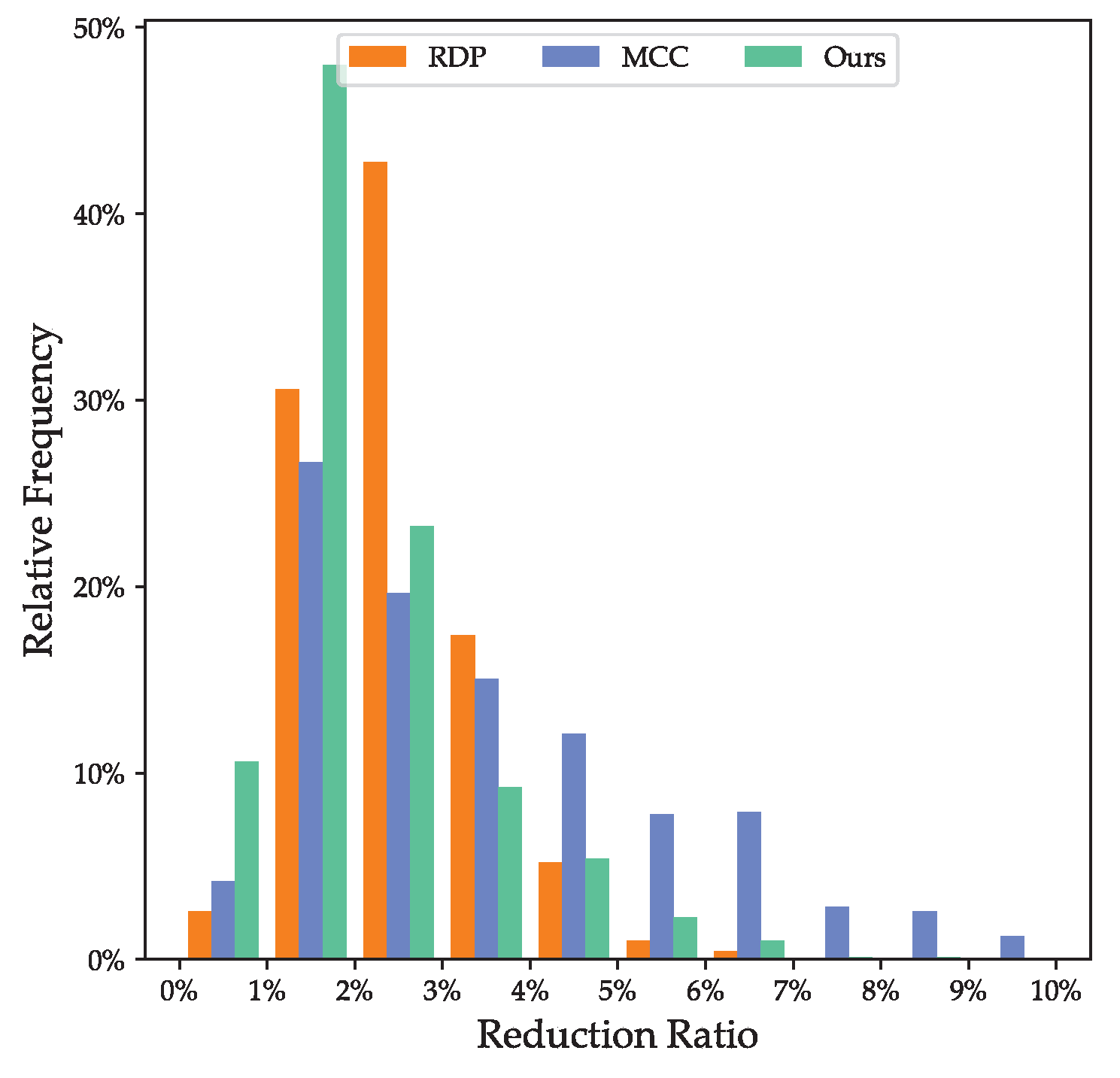
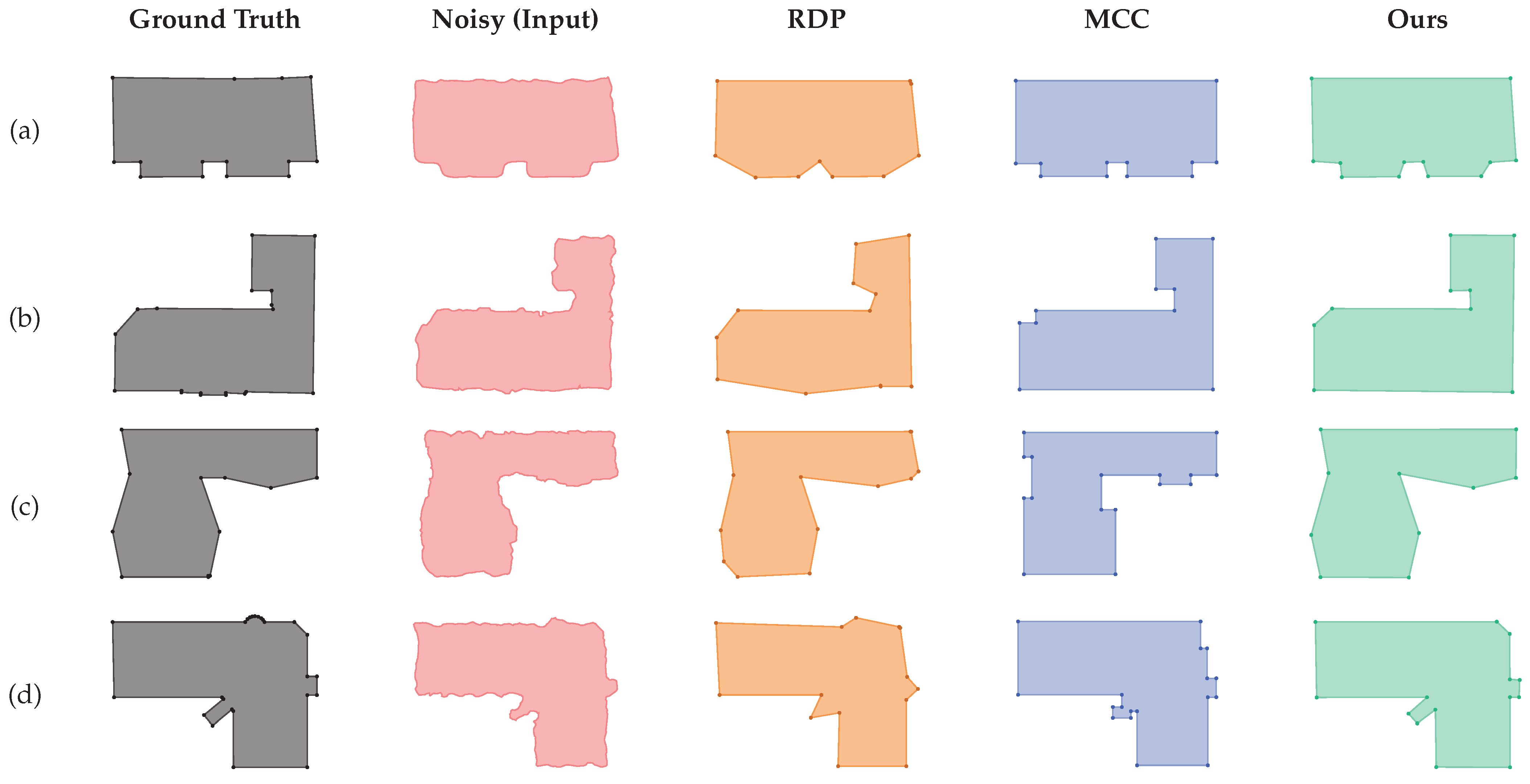
- RDP can efficiently remove vertices, but preserves the undesirable bevels at corners (e.g., (c)). Additionally, the tolerance of RDP is difficult to determine as a larger tolerance improves effectiveness on denoising, but small details are more likely to be erased (e.g., (a) and (d)).
- MCC assumes that buildings are formed with cuboids and generates compact results on axis-aligned edges with the corners recovered (e.g., (a), (b), and (d)). On the other hand, the non-axis-aligned edges are reconstructed into zigzag structures (e.g., (c) and part of (d)), leading to increased loss and excessive vertices.
- Our method takes advantage of the planar primitives of buildings in the vertex attaching for denoising, which produces more-accurate results compared to RDP. Moreover, our strategy of corner recovery has superior effectiveness without the axis-aligned limitation compared to MCC. Therefore, our method exhibits the ability to simultaneously simplify the contours and recover accurate corners, as shown in the results.
4.2.3. Comparison of Surface Generation
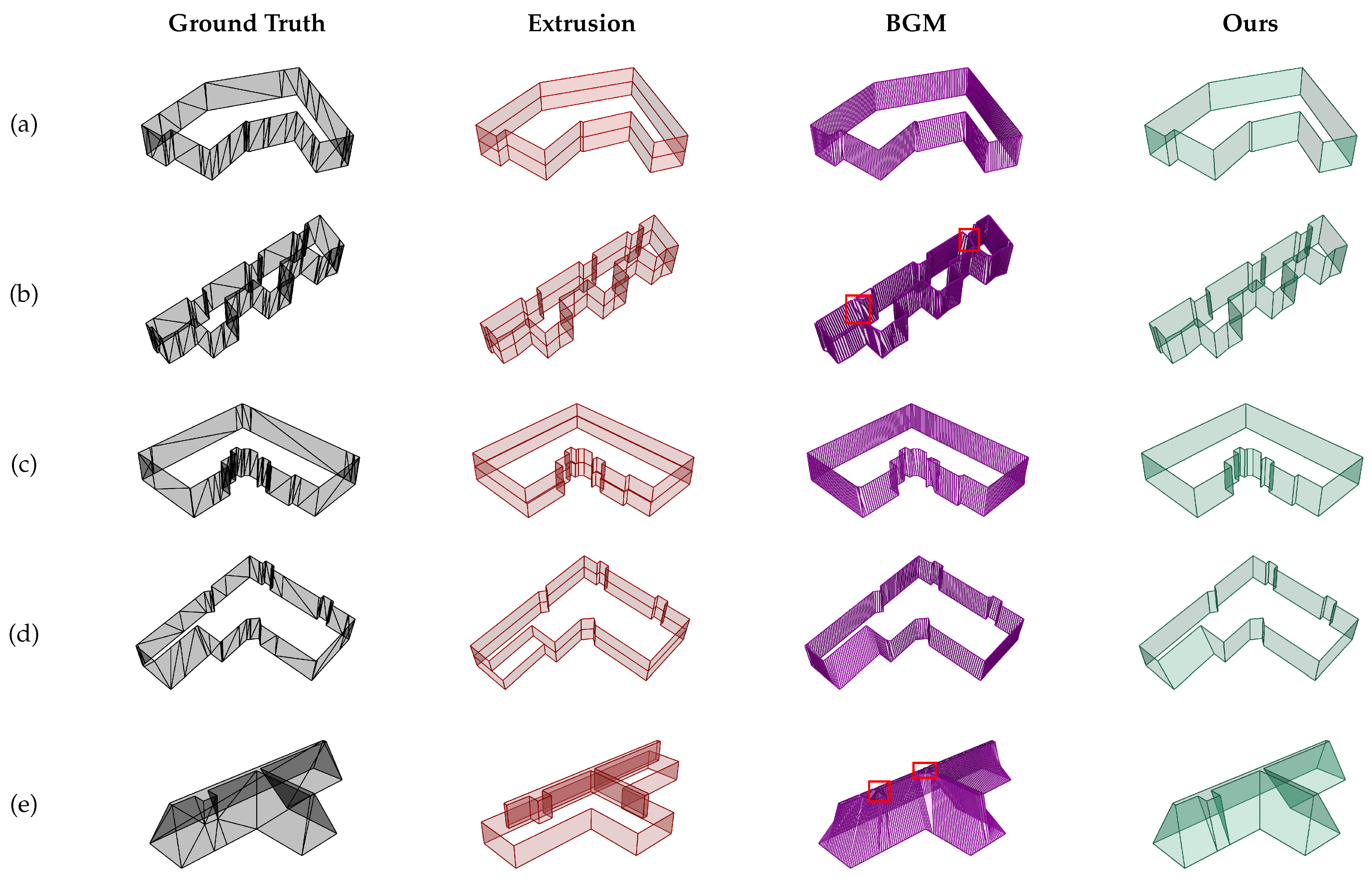
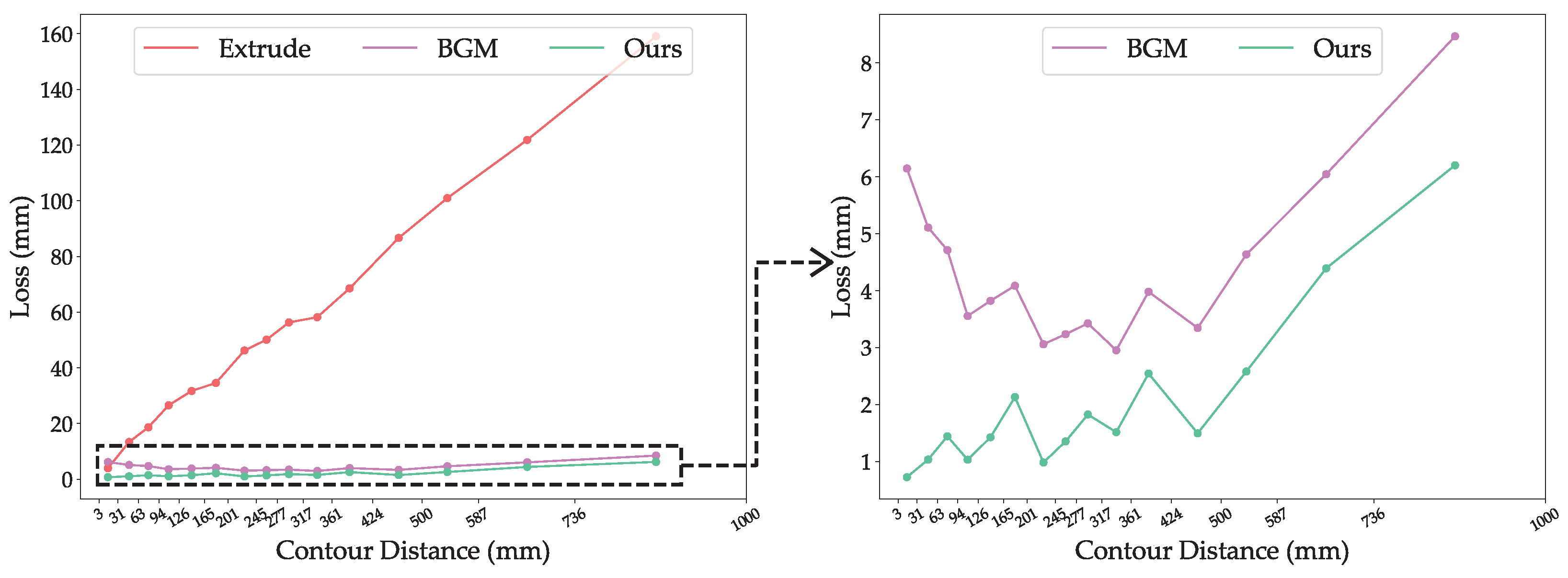
- The extrusion method exhibits significantly worse effectiveness at large-distance pairs of contours, as extrusion is not capable of generating non-vertical surfaces between contours.
- BGM can generate gradual, smooth surfaces between contours, but requires enormous faces while suffering from the same ambiguous topology problem as in the “same-pair” parts. Additionally, the result shows that BGM has the best effectiveness when the contour pairs are slightly different, but under-performs when the contour pairs are identical. This arises from the fact that BGM is less likely to create an ambiguous topology when the edges exhibit significantly different weights in the bipartite graph matching.
- Our method recursively splits polylines and produces stable results without an ambiguous topology. The merging of new vertices helps avoid unnecessary vertices and keep the compactness of the contours. As shown in the experimental results, our method outperforms by using significantly fewer faces while achieving lower losses compared to other methods.
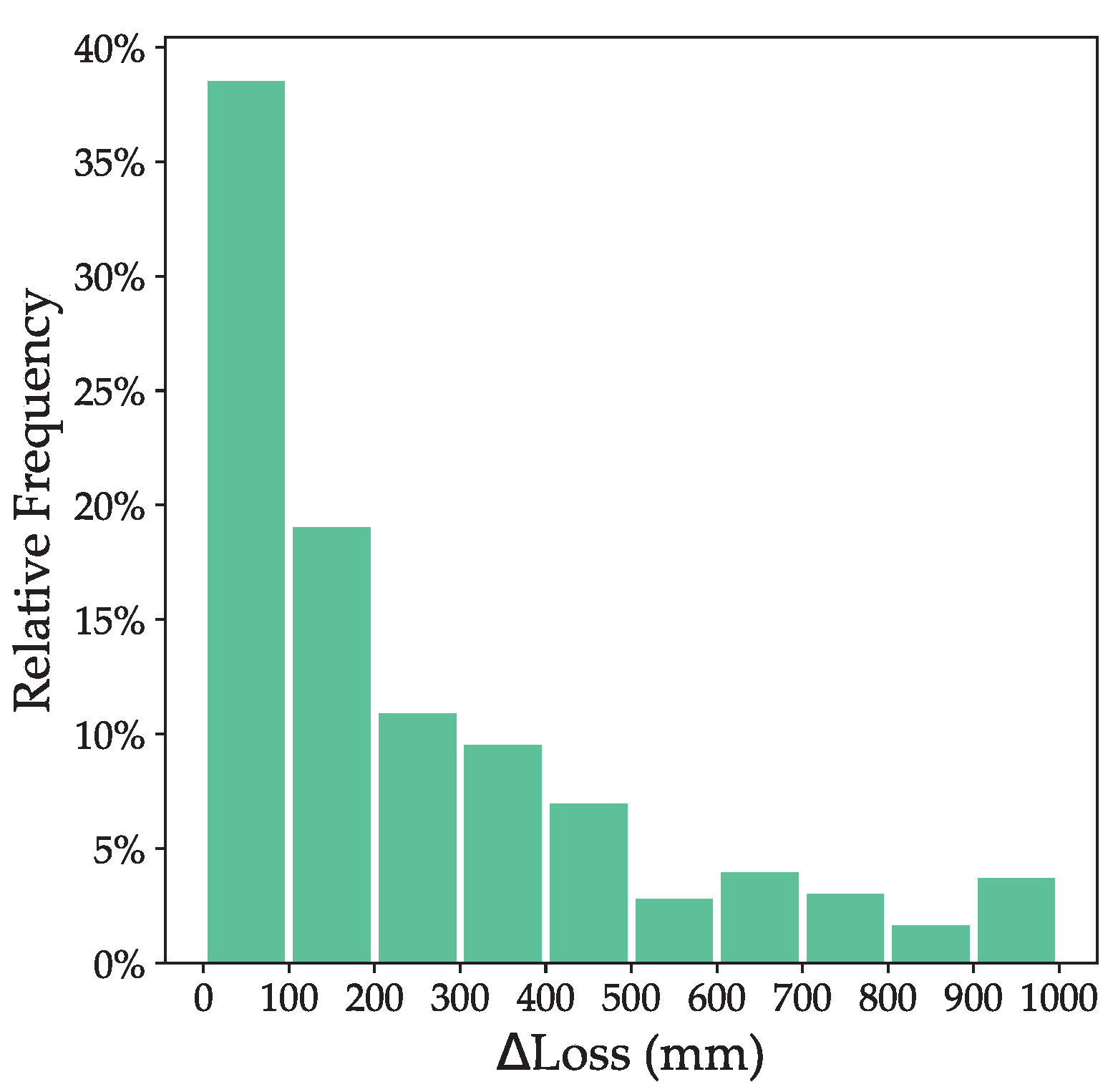
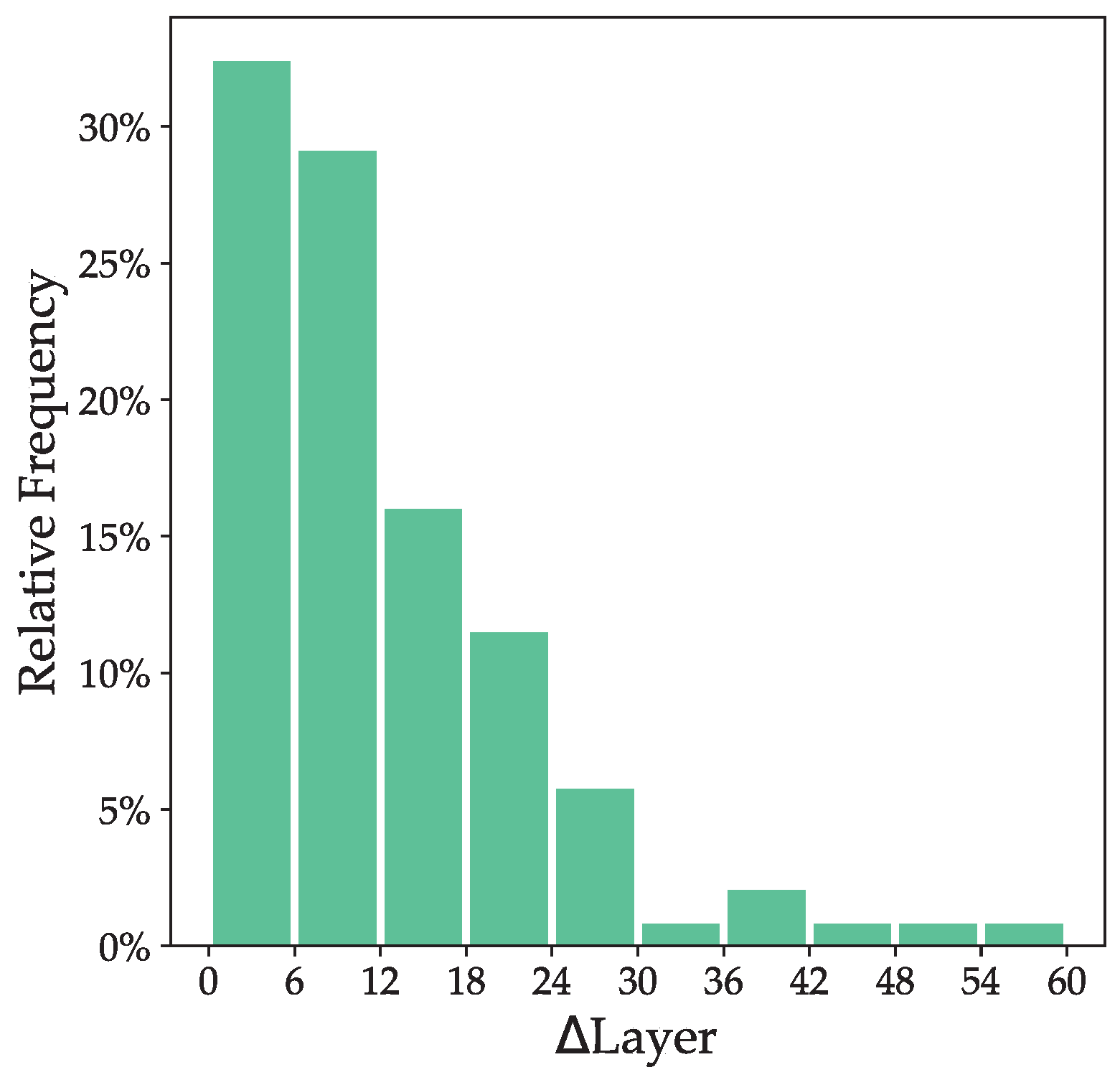
4.3. Effectiveness of Iterative Pipeline
- Result 1: Using evenly spaced contour layers. is equal to the number of contour layers in the iterative reconstruction result.
- Result 2: Using evenly spaced contour layers. is the minimum number of contour layers, where the result with contour layers has a lower loss than the iterative reconstruction result.
5. Discussion
5.1. Limitation
5.2. Future Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MVS | multi-view stereo |
| SfM | structure from motion |
| ALS | airborne laser scanning |
| RANSAC | random sample consensus |
| QEM | quadric error metric |
| DSM | digital surface model |
| LoDs | level of details |
| RDP | Ramer–Douglas–Peucker |
| PCA | principal component analysis |
| BGM | bipartite graph matching |
| MCC | minimum circumscribed cuboids |
References
- Xu, Y.; Stilla, U. Toward building and civil infrastructure reconstruction from point clouds: A review on data and key techniques. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2857–2885. [Google Scholar] [CrossRef]
- Ali, T.; Mehrabian, A. A novel computational paradigm for creating a Triangular Irregular Network (TIN) from LiDAR data. Nonlinear Anal. Theory, Methods Appl. 2009, 71, e624–e629. [Google Scholar] [CrossRef]
- Bouzas, V.; Ledoux, H.; Nan, L. Structure-aware Building Mesh Polygonization. ISPRS J. Photogramm. Remote Sens. 2020, 167, 432–442. [Google Scholar] [CrossRef]
- Gao, X.; Wu, K.; Pan, Z. Low-Poly Mesh Generation for Building Models. In Proceedings of the Special Interest Group on Computer Graphics and Interactive Techniques Conference Proceedings, New York, NY, USA, 7–11 August 2022. [Google Scholar] [CrossRef]
- Li, M.; Nan, L. Feature-preserving 3D mesh simplification for urban buildings. ISPRS J. Photogramm. Remote Sens. 2021, 173, 135–150. [Google Scholar] [CrossRef]
- Huang, J.; Stoter, J.; Peters, R.; Nan, L. City3D: Large-Scale Building Reconstruction from Airborne LiDAR Point Clouds. Remote Sens. 2022, 14, 2254. [Google Scholar] [CrossRef]
- Kamra, V.; Kudeshia, P.; ArabiNaree, S.; Chen, D.; Akiyama, Y.; Peethambaran, J. Lightweight Reconstruction of Urban Buildings: Data Structures, Algorithms, and Future Directions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 902–917. [Google Scholar] [CrossRef]
- Zhang, K.; Yan, J.; Chen, S.C. Automatic Construction of Building Footprints From Airborne LIDAR Data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2523–2533. [Google Scholar] [CrossRef]
- Zhou, Q.Y.; Neumann, U. Fast and Extensible Building Modeling from Airborne LiDAR Data. In Proceedings of the 16th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, New York, NY, USA, 5 November 2008. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, K.; Zhang, C.; Chen, S.C.; Narasimhan, G. Automatic Construction of 3-D Building Model From Airborne LIDAR Data Through 2-D Snake Algorithm. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3–14. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, H.; Cheng, L.; Li, M.; Wang, Y.; Xia, N.; Chen, Y.; Tang, Y. Three-Dimensional Reconstruction of Building Roofs from Airborne LiDAR Data Based on a Layer Connection and Smoothness Strategy. Remote Sens. 2016, 8, 415. [Google Scholar] [CrossRef]
- Yan, L.; Li, Y.; Xie, H. Urban Building Mesh Polygonization Based on 1-Ring Patch and Topology Optimization. Remote Sens. 2021, 13, 4777. [Google Scholar] [CrossRef]
- Yan, L.; Li, Y.; Dai, J.; Xie, H. UBMDP: Urban Building Mesh Decoupling and Polygonization. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–16. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Lu, Q.; Jiang, W. Contour clustering analysis for building reconstruction from LiDAR data. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008. [Google Scholar]
- Li, L.; Zhang, J.; Jiang, W. Automatic complex building reconstruction from LIDAR based on hierarchical structure analysis. In Proceedings of the MIPPR 2009: Pattern Recognition and Computer Vision, Yichang, China, 30 October–1 November 2009. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Wu, Q.; Yao, S.; Zhao, F.; Mao, W.; Wu, J. A Graph-Based Approach for 3D Building Model Reconstruction from Airborne LiDAR Point Clouds. Remote Sens. 2017, 9, 92. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, C.; Chen, S.; Chen, X. Automatic Reconstruction of Building Façade Model from Photogrammetric Mesh Model. Remote Sens. 2021, 13, 3801. [Google Scholar] [CrossRef]
- Zhang, W.; Li, Z.; Shan, J. Optimal Model Fitting for Building Reconstruction From Point Clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9636–9650. [Google Scholar] [CrossRef]
- Song, J.; Xia, S.; Wang, J.; Chen, D. Curved Buildings Reconstruction From Airborne LiDAR Data by Matching and Deforming Geometric Primitives. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1660–1674. [Google Scholar] [CrossRef]
- Coiffier, G.; Basselin, J.; Ray, N.; Sokolov, D. Parametric Surface Fitting on Airborne Lidar Point Clouds for Building Reconstruction. Comput. Aided Des. 2021, 140, 103090. [Google Scholar] [CrossRef]
- Qian, Y.; Zhang, H.; Furukawa, Y. Roof-GAN: Learning To Generate Roof Geometry and Relations for Residential Houses. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021. [Google Scholar] [CrossRef]
- Li, M.; Wonka, P.; Nan, L. Manhattan-world Urban Reconstruction from Point Clouds. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar] [CrossRef]
- Nan, L.; Wonka, P. PolyFit: Polygonal Surface Reconstruction from Point Clouds. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Ling, X.; Wan, Y.; Liu, L.; Li, Q. TopoLAP: Topology Recovery for Building Reconstruction by Deducing the Relationships between Linear and Planar Primitives. Remote Sens. 2019, 11, 1372. [Google Scholar] [CrossRef]
- Xie, L.; Hu, H.; Zhu, Q.; Li, X.; Tang, S.; Li, Y.; Guo, R.; Zhang, Y.; Wang, W. Combined Rule-Based and Hypothesis-Based Method for Building Model Reconstruction from Photogrammetric Point Clouds. Remote Sens. 2021, 13, 1107. [Google Scholar] [CrossRef]
- Chen, Z.; Ledoux, H.; Khademi, S.; Nan, L. Reconstructing compact building models from point clouds using deep implicit fields. ISPRS J. Photogramm. Remote Sens. 2022, 194, 58–73. [Google Scholar] [CrossRef]
- Garland, M.; Heckbert, P.S. Surface simplification using quadric error metrics. In Proceedings of the SIGGRAPH97: The 24th International Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 3 August 1997. [Google Scholar] [CrossRef]
- Wang, S.; Liu, X.; Zhang, Y.; Li, J.; Zou, S.; Wu, J.; Tao, C.; Liu, Q.; Cai, G. Semantic-guided 3D building reconstruction from triangle meshes. Int. J. Appl. Earth Obs. Geoinf. 2023, 119, 103324. [Google Scholar] [CrossRef]
- Heckbert, P.S.; Garland, M. Survey of Polygonal Surface Simplification Algorithms; Technical Report; School of Computer Science, Carnegie Mellon University: Pittsburgh, PA, USA, 1997. [Google Scholar]
- Wu, Q.; Liu, H.; Wang, S.; Yu, B.; Beck, R.; Hinkel, K. A Localized Contour Tree Method for Deriving Geometric and Topological Properties of Complex Surface Depressions Based on High-Resolution Topographical Data. Int. J. Geogr. Inf. Sci. 2015, 29, 2041–2060. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Wu, Q.; Huang, Y.; Chen, Z.; Wu, J. Individual Tree Crown Delineation Using Localized Contour Tree Method and Airborne LiDAR Data in Coniferous Forests. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 82–94. [Google Scholar] [CrossRef]
- Helsingin Kaupungin Kaupunginkanslia, t.j.v. 3D Models of Helsinki. Available online: https://hri.fi/data/en_GB/dataset/helsingin-3d-kaupunkimalli (accessed on 7 December 2023).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | |||||
|---|---|---|---|---|---|
| Average Loss (mm) | BGM | 94.1 | 98.6 | 104.8 | 111.5 |
| MCC | 117.6 | 116.8 | 117.0 | 117.2 | |
| QEM | 121.1 | 176.4 | 180.5 | 217.2 | |
| Ours | 91.0 | 94.0 | 102.6 | 114.6 | |
| Average Number of Triangles | BGM | 40,690.2 | 44,838.2 | 48,453.5 | 54,032.4 |
| MCC | 1105.6 | 1266.7 | 1413.1 | 1614.2 | |
| QEM | 163.8 | 208.0 | 232.9 | 305.9 | |
| Ours | 163.8 | 208.0 | 232.9 | 305.9 | |
| Average Number of Contours | BGM | 68.2 | 75.2 | 81.2 | 90.5 |
| MCC | 30.8 | 36.2 | 40.7 | 47.2 | |
| Ours | 6.4 | 7.6 | 8.0 | 9.9 |
| Data | Building | Methods | Loss (mm) | Number of Contours | Number of Triangles |
|---|---|---|---|---|---|
| semantic models | (a) | BGM | 64.9 | 95 | 56,760 |
| MCC | 124.5 | 10 | 476 | ||
| QEM | 89.1 | — | 40 | ||
| Ours | 54.4 | 4 | 40 | ||
| (b) | BGM | 98.9 | 65 | 38,840 | |
| MCC | 125.3 | 22 | 1368 | ||
| QEM | 94.7 | — | 155 | ||
| Ours | 119.8 | 6 | 155 | ||
| (c) | BGM | 75.9 | 279 | 165,582 | |
| MCC | 207.8 | 116 | 2425 | ||
| QEM | 522.0 | — | 50 | ||
| Ours | 57.5 | 5 | 50 | ||
| (d) | BGM | 111.0 | 75 | 44,848 | |
| MCC | 124.4 | 46 | 2268 | ||
| QEM | 205.2 | — | 198 | ||
| Ours | 146.8 | 5 | 198 | ||
| reality models | (e) | BGM | 74.6 | 98 | 58,679 |
| MCC | 106.7 | 74 | 1084 | ||
| QEM | 75.1 | — | 317 | ||
| Ours | 224.2 | 16 | 317 | ||
| (f) | BGM | 37.6 | 55 | 32,690 | |
| MCC | 172.1 | 48 | 2545 | ||
| QEM | 743.1 | — | 66 | ||
| Ours | 163.7 | 5 | 66 | ||
| (g) | BGM | 78.5 | 255 | 151,765 | |
| MCC | 124.2 | 174 | 3104 | ||
| QEM | 214.7 | — | 157 | ||
| Ours | 168.8 | 4 | 157 | ||
| (h) | BGM | 50.1 | 121 | 72,467 | |
| MCC | 135.8 | 106 | 1692 | ||
| QEM | 243.3 | — | 90 | ||
| Ours | 260.5 | 6 | 90 |
| Methods | Average Loss (mm) | Average Reduction Ratio | Average Number of Vertices |
|---|---|---|---|
| RDP | 446.5 | 2.48% | 12.2 |
| MCC | 398.8 | 3.47% | 19.0 |
| Ours | 124.3 | 2.09% | 10.4 |
| Contour | Number of Vertices | Methods | Loss (mm) | Number of Vertices |
|---|---|---|---|---|
| (a) | 14 | RDP | 330.0 | 10 |
| MCC | 228.6 | 12 | ||
| Ours | 64.0 | 12 | ||
| (b) | 19 | RDP | 528.5 | 12 |
| MCC | 397.1 | 10 | ||
| Ours | 107.8 | 9 | ||
| (c) | 13 | RDP | 433.6 | 13 |
| MCC | 556.9 | 16 | ||
| Ours | 55.2 | 10 | ||
| (d) | 25 | RDP | 504.2 | 14 |
| MCC | 366.3 | 18 | ||
| Ours | 65.3 | 14 |
| Methods | Average Loss (mm) | Average Number of Triangles |
|---|---|---|
| Extrusion | 0.00114 | 115.0 |
| BGM | 1.57457 | 600.0 |
| Ours | 0.00012 | 57.5 |
| Contour Pair | Distance (mm) | Number of Vertices | Methods | Loss (mm) | Number of Triangles |
|---|---|---|---|---|---|
| (a) | 0.5 | 22 | Extrusion | 0.00064 | 44 |
| BGM | 1.1 | 600 | |||
| Ours | 0.00006 | 22 | |||
| (b) | 1.2 | 68 | Extrusion | 0.00012 | 136 |
| BGM | 2.1 | 600 | |||
| Ours | 0.00011 | 68 | |||
| (c) | 228.1 | 42 | Extrusion | 35.3 | 84 |
| BGM | 1.6 | 600 | |||
| Ours | 0.2 | 42 | |||
| (d) | 617.8 | 42 | Extrusion | 495.9 | 84 |
| BGM | 3.5 | 600 | |||
| Ours | 0.05 | 42 | |||
| (e) | 2796.6 | 20 | Extrusion | 699.0 | 40 |
| BGM | 24.1 | 600 | |||
| Ours | 3.5 | 22 |
| Methods | Average Loss (mm) | Average Number of Triangles |
|---|---|---|
| Extrusion | 86.0 | 155.5 |
| BGM | 6.3 | 600.0 |
| Ours | 3.7 | 79.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, X.; Liu, Y.; Zhang, Y. Iterative Low-Poly Building Model Reconstruction from Mesh Soups Based on Contour. Remote Sens. 2024, 16, 695. https://doi.org/10.3390/rs16040695
Xiao X, Liu Y, Zhang Y. Iterative Low-Poly Building Model Reconstruction from Mesh Soups Based on Contour. Remote Sensing. 2024; 16(4):695. https://doi.org/10.3390/rs16040695
Chicago/Turabian StyleXiao, Xiao, Yuhang Liu, and Yanci Zhang. 2024. "Iterative Low-Poly Building Model Reconstruction from Mesh Soups Based on Contour" Remote Sensing 16, no. 4: 695. https://doi.org/10.3390/rs16040695
APA StyleXiao, X., Liu, Y., & Zhang, Y. (2024). Iterative Low-Poly Building Model Reconstruction from Mesh Soups Based on Contour. Remote Sensing, 16(4), 695. https://doi.org/10.3390/rs16040695