

Sentinel-2 versus PlanetScope Images for Goldenrod Invasive Plant Species Mapping



Abstract
1. Introduction
2. Materials and Methods
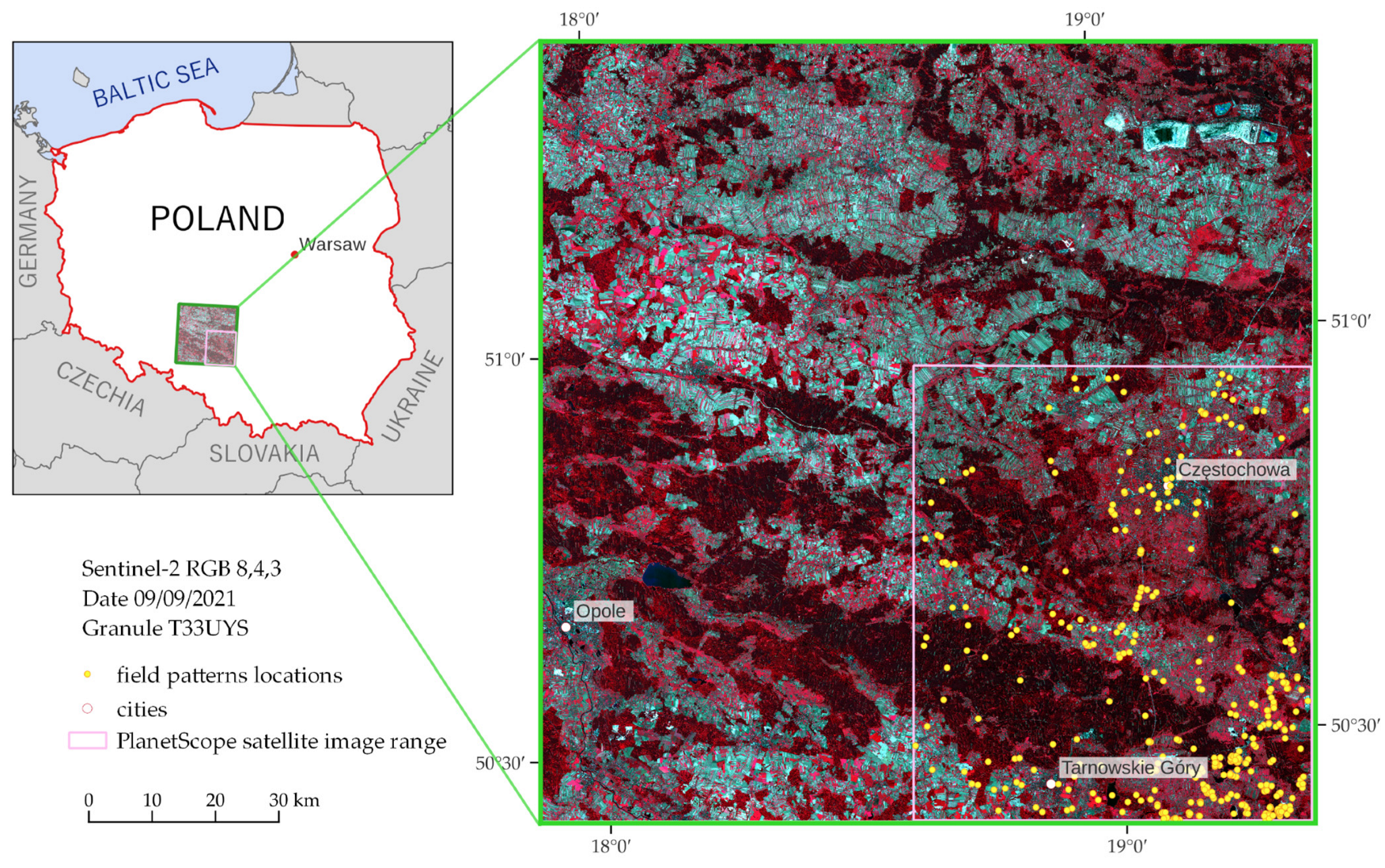
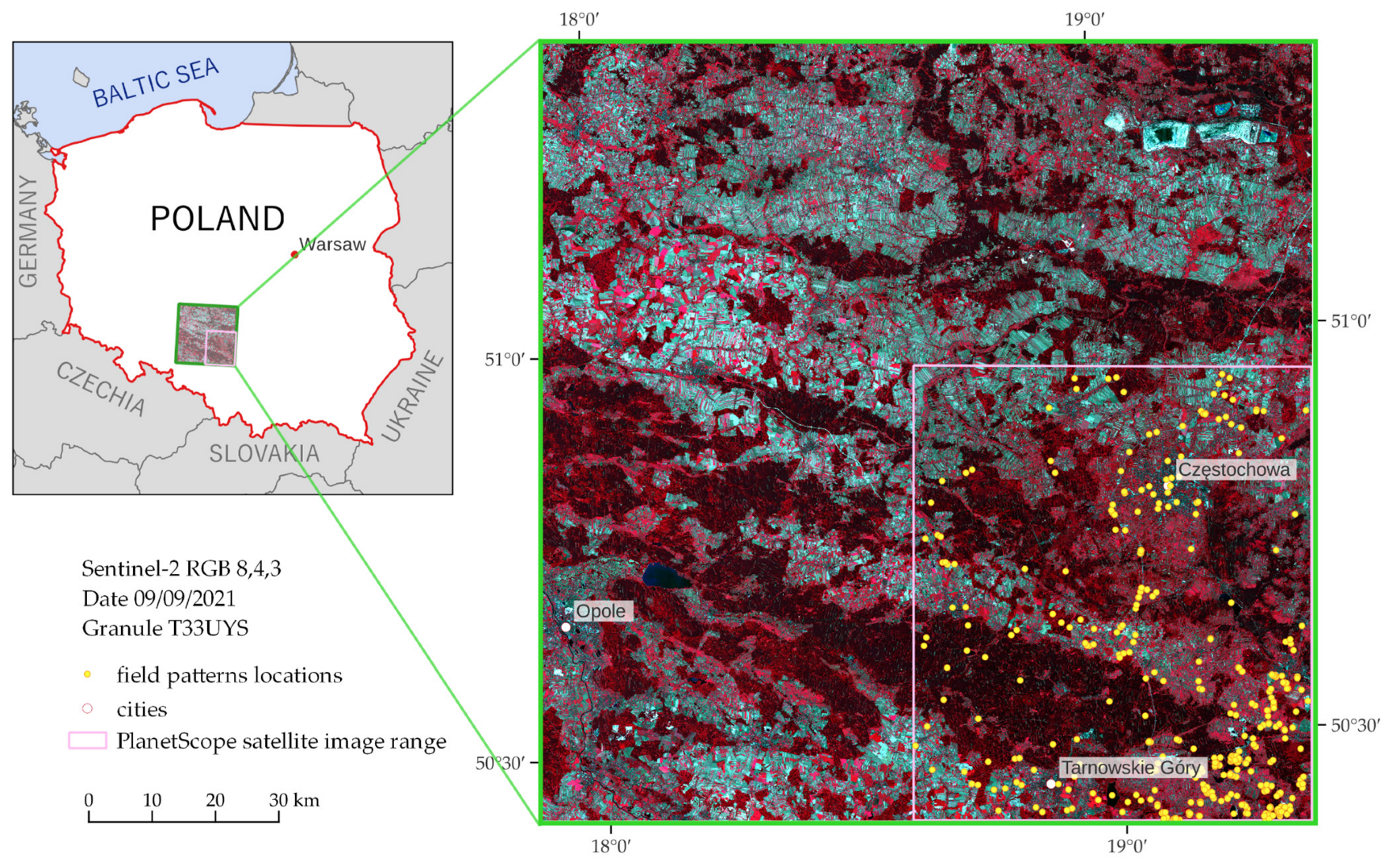
2.1. Research Target and Area
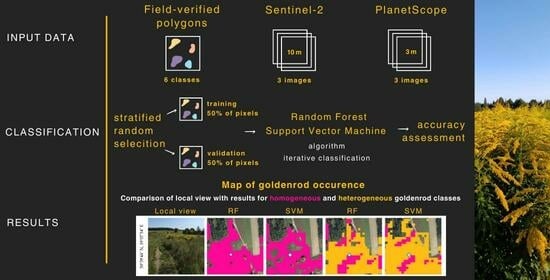
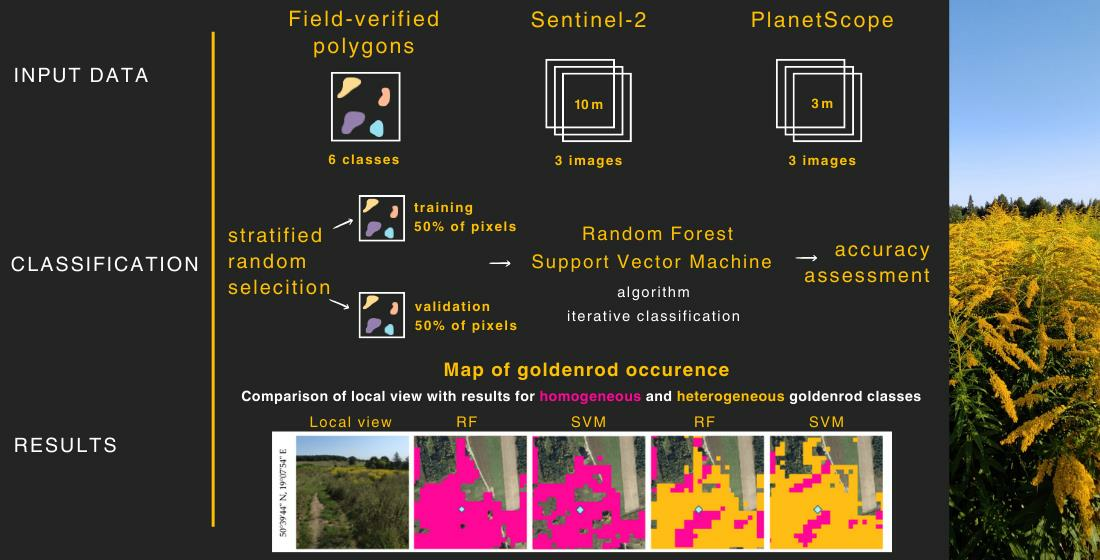
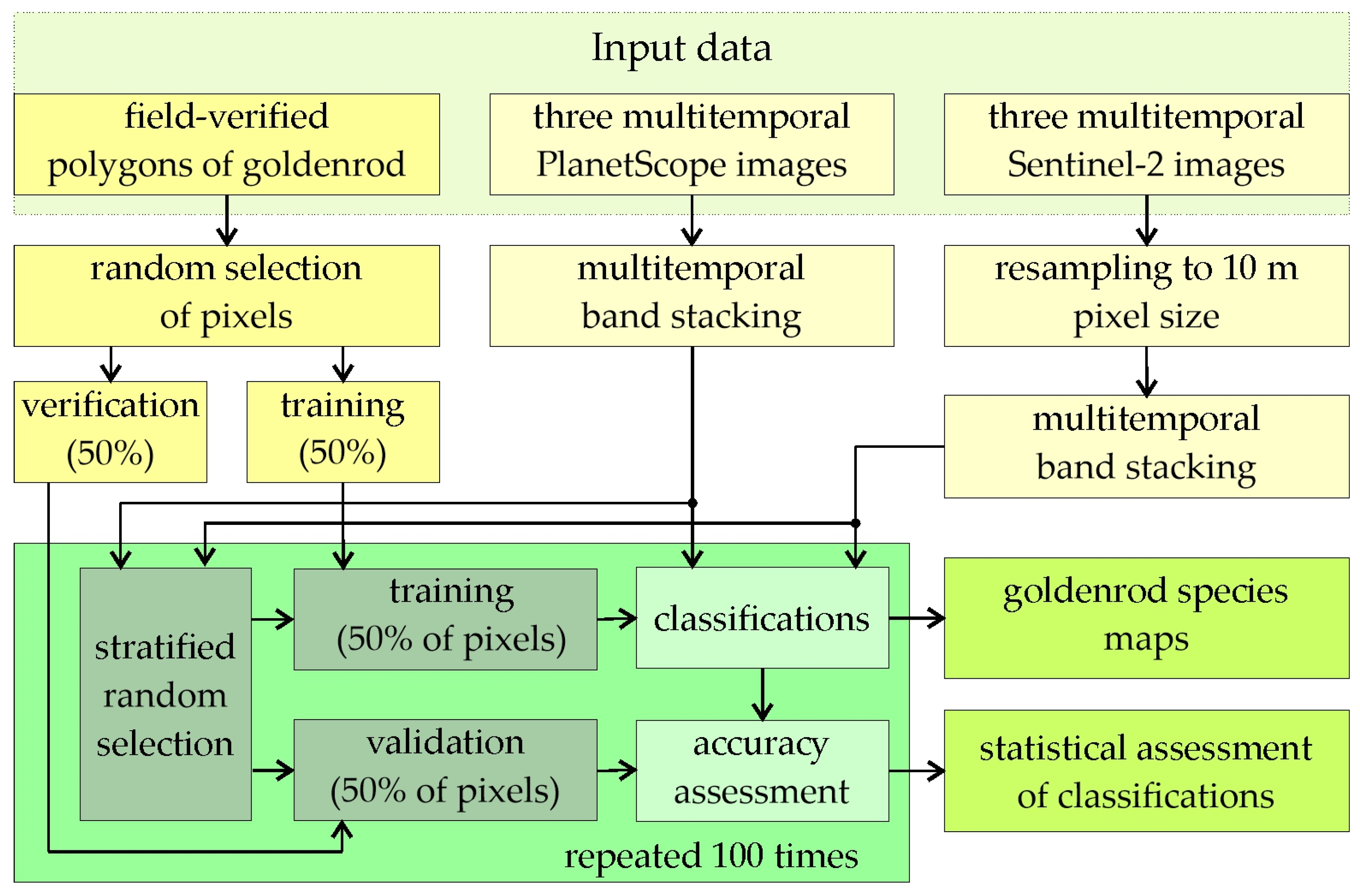
2.2. Input Data
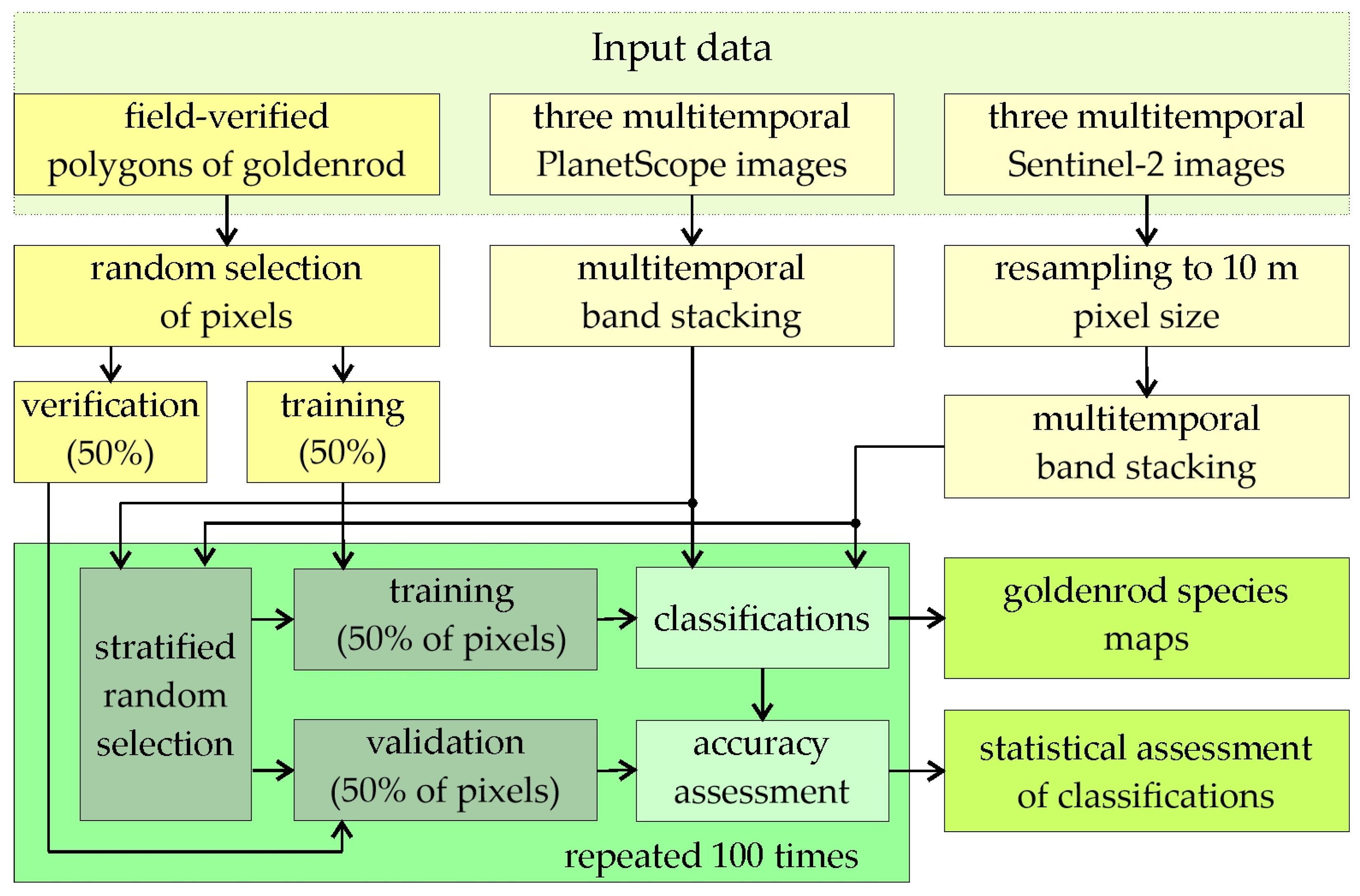
2.3. Classification Procedure
3. Results
4. Discussion
5. Conclusions
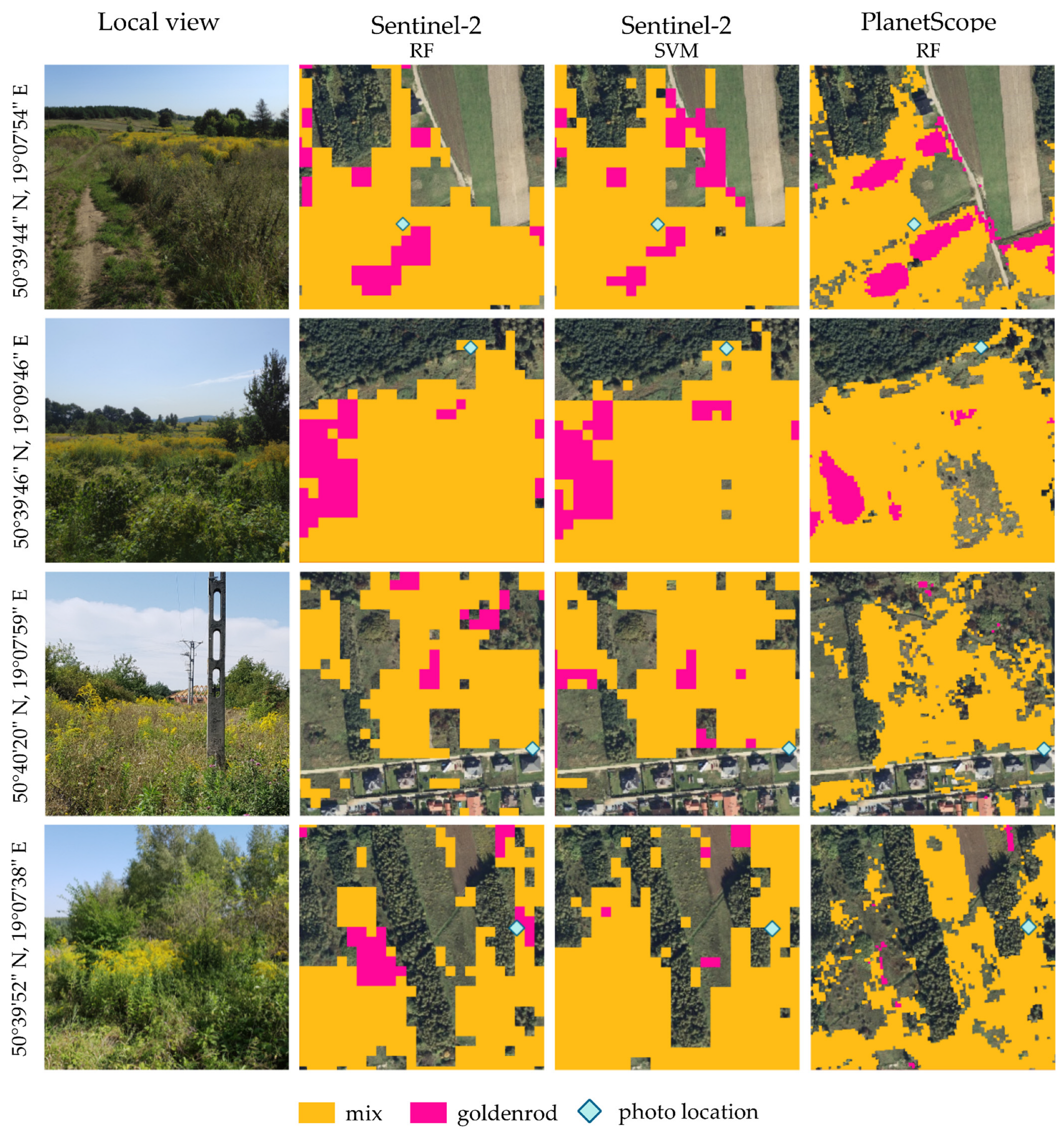
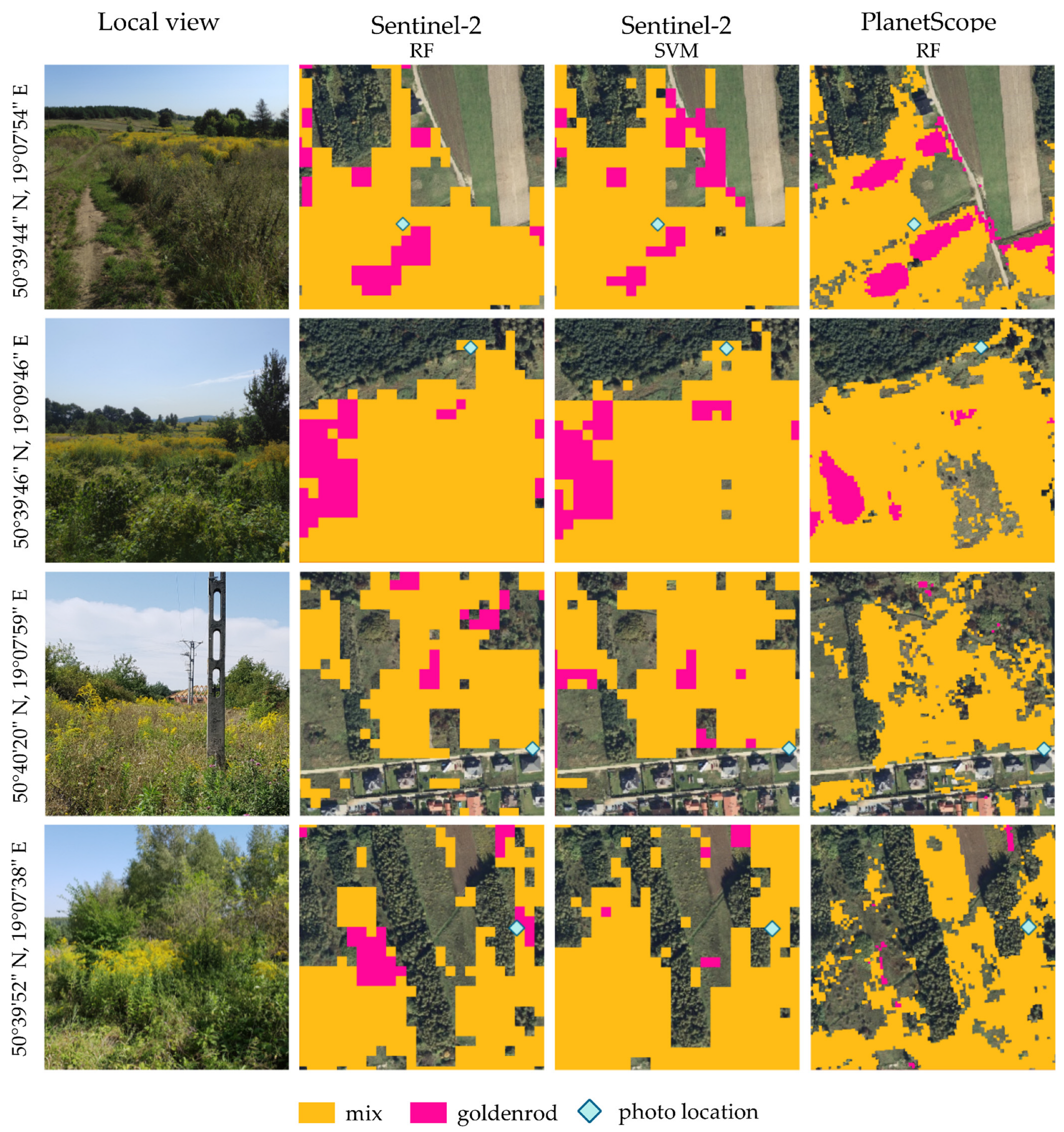
- the recommended classification method of goldenrod is the use of two classes: (a) homogeneous goldenrod (canopy almost homogeneously covered by goldenrod) and (b) a mix class (confirms the presence of goldenrod, but other plants dominate). The classification results may be lower by a few percentage points, but reflect more accurately cores of the invasion and also indicate the beginnings and directions of the invasion (around the homogeneous patches of goldenrod are visible mixes).
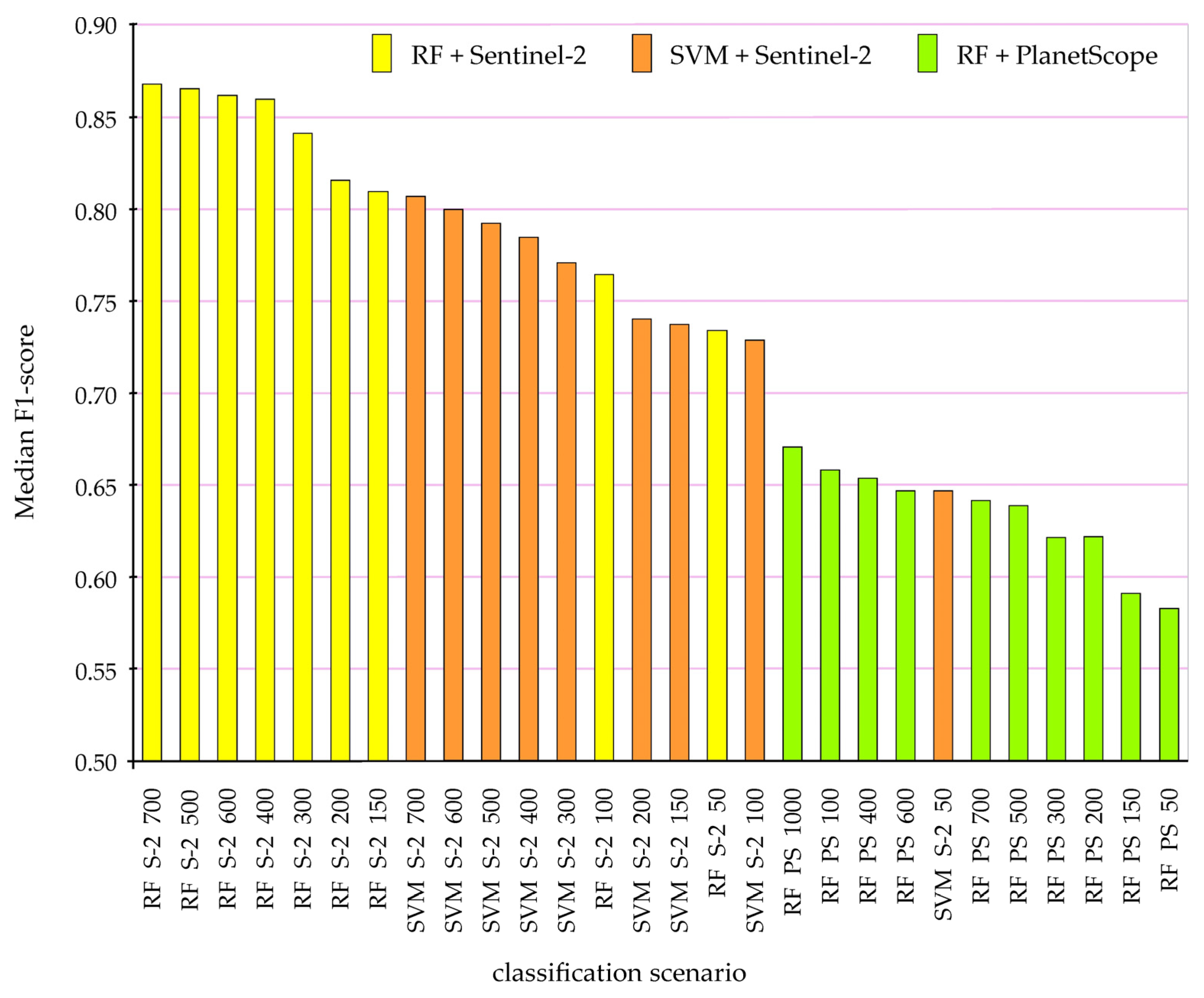
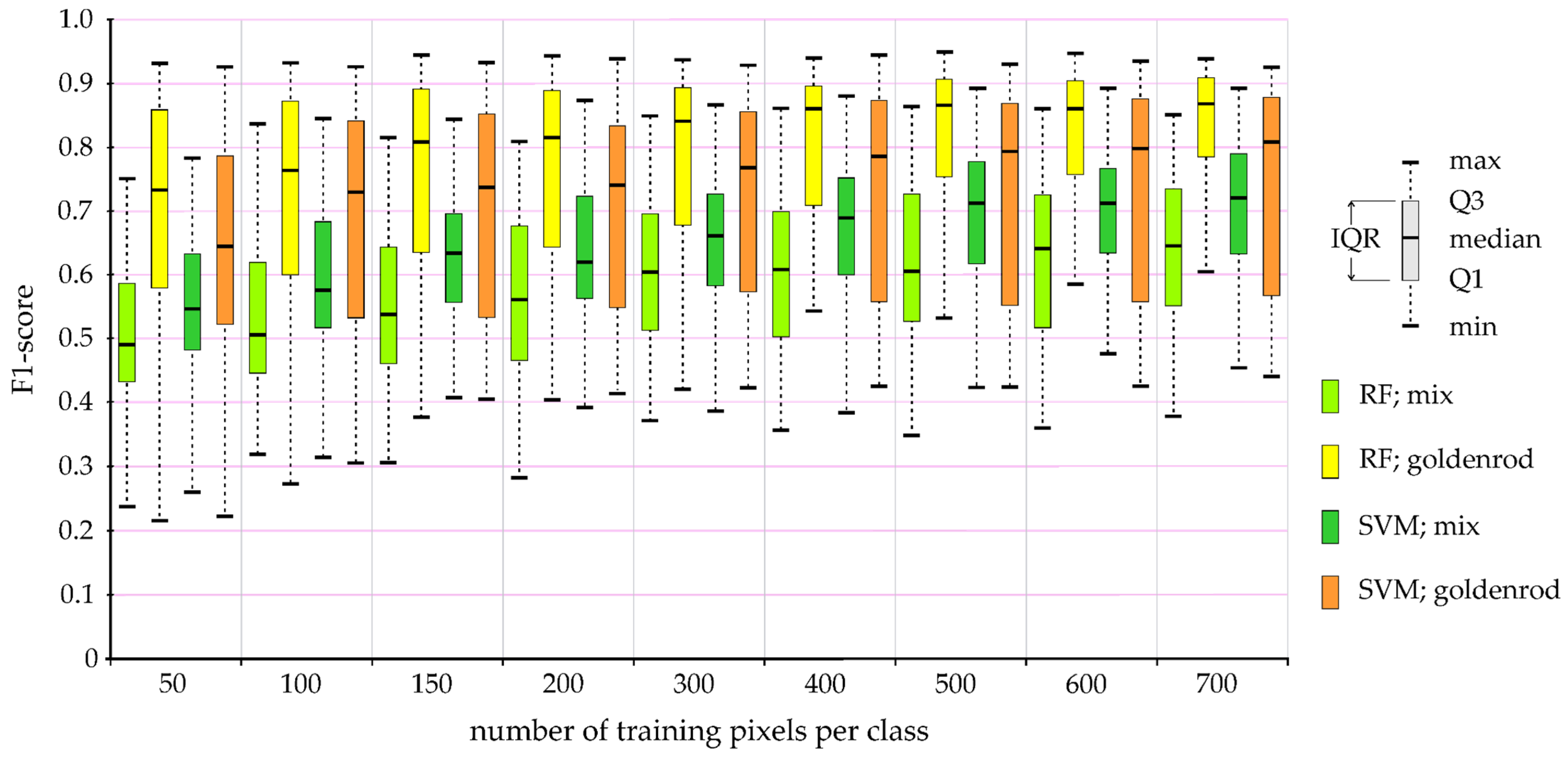
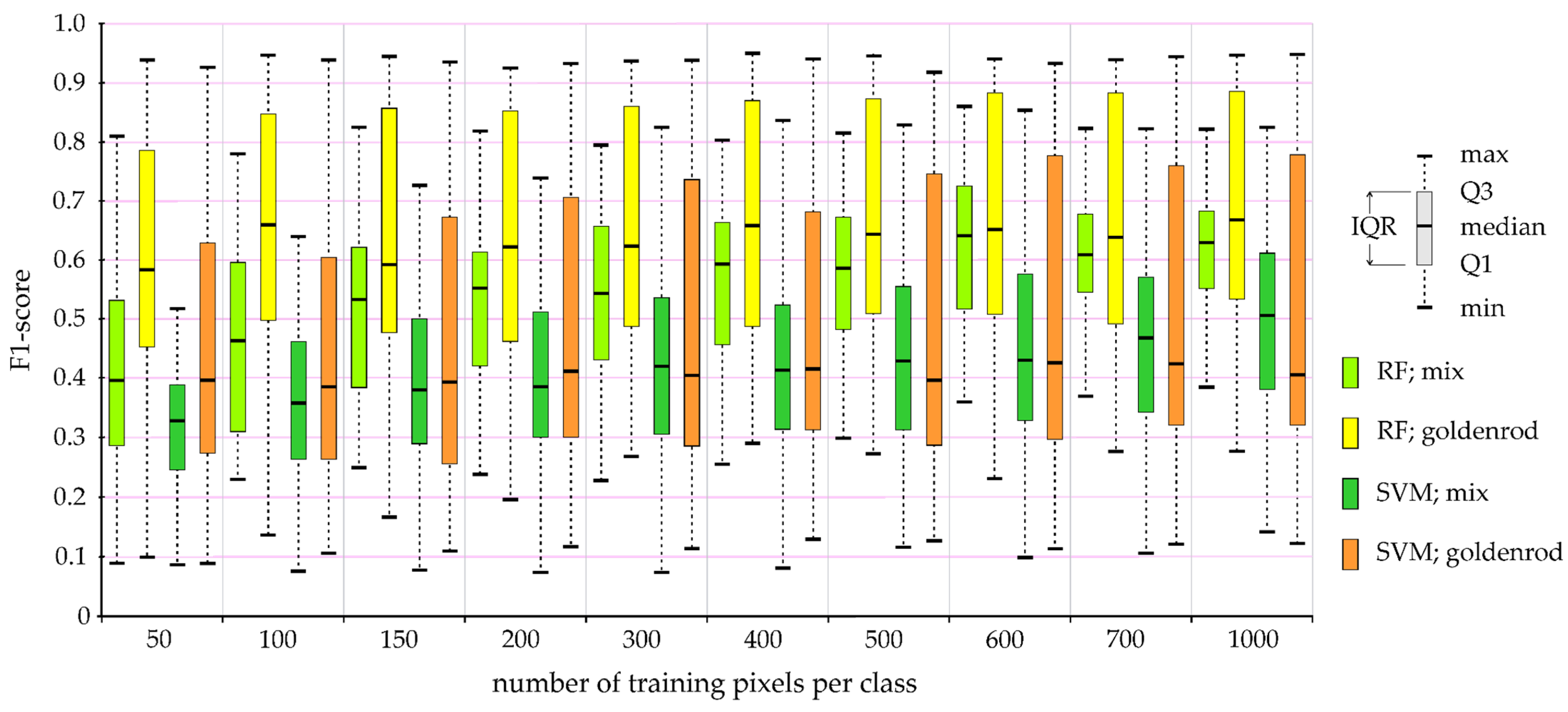
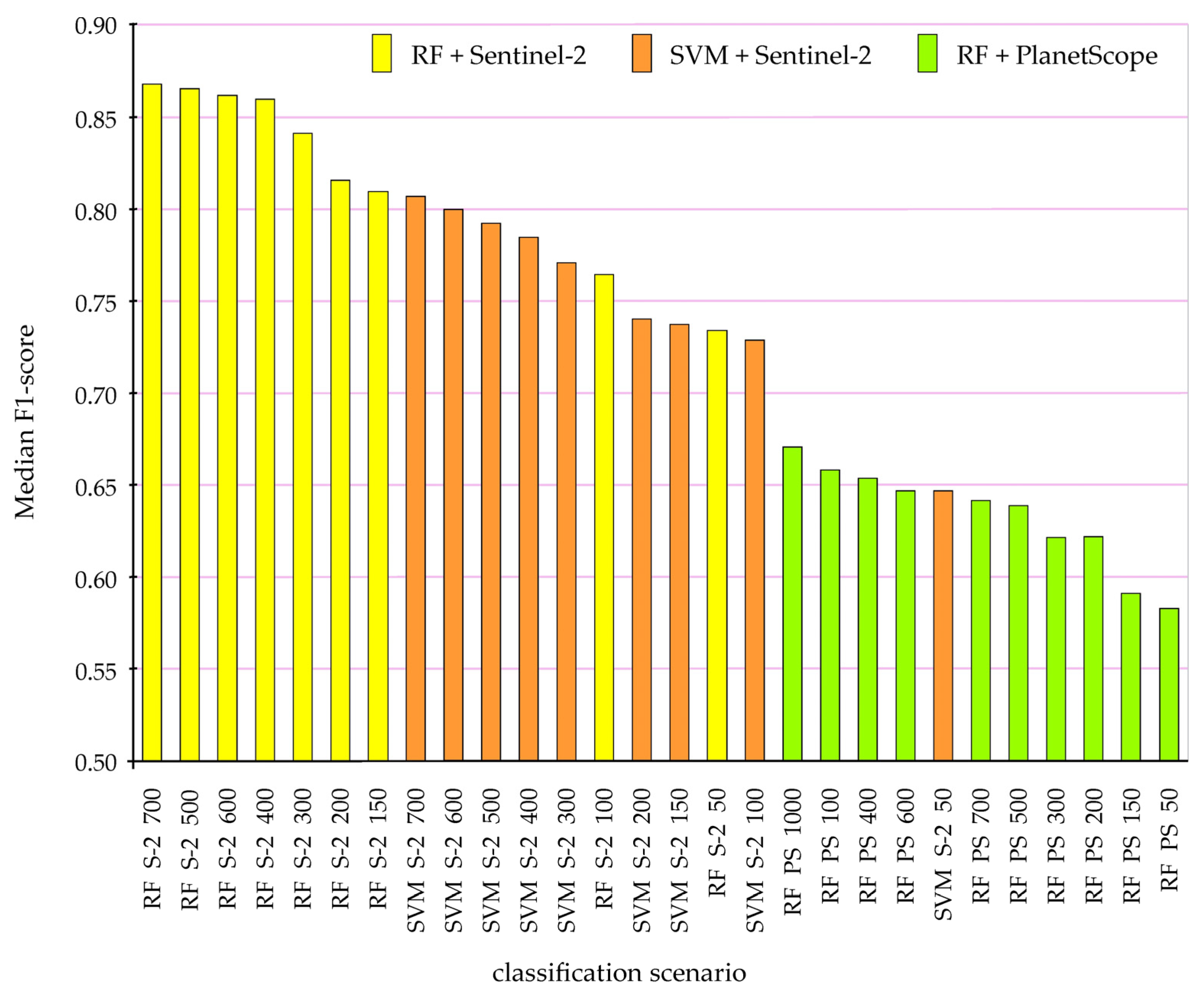
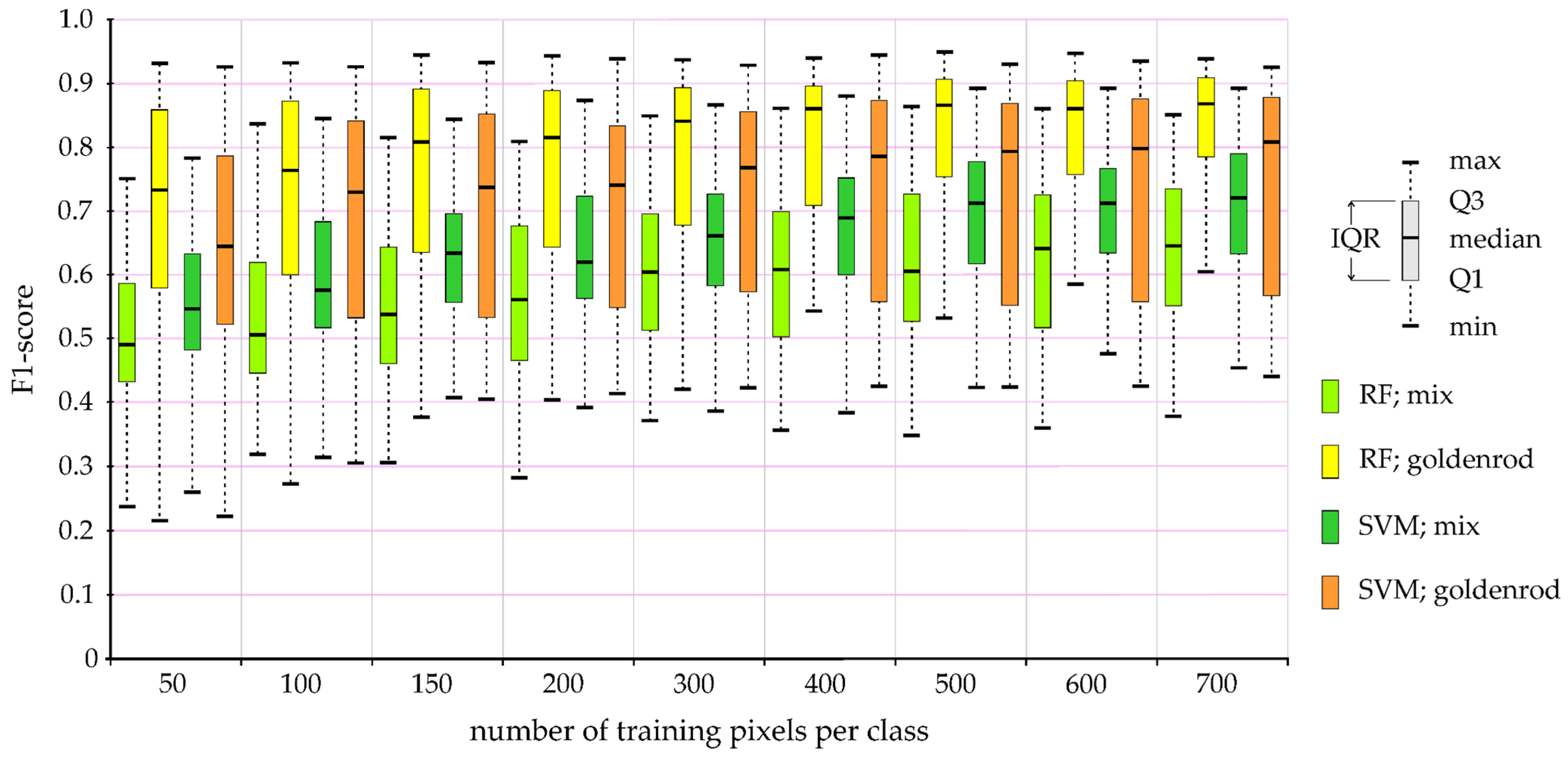
- multitemporal images of Sentinel-2 offer more information than high-resolution PlanetScope images. In the case of compact and dense patches covered with goldenrod, the differences in accuracy (median of the F1-score) are comparable, but in the case of new invasions with a heterogeneous canopy, the classification scores differ by up to 50% in favor of the Sentinel-2 images.
- the RF algorithm offers better identification results of pure goldenrod patches than SVM for both Sentinel-2 and PlanetScope images, but SVM offers higher median results of heterogeneous patches of goldenrod and native plants in early stages of the invasion.
- the RF algorithm obtains the best identification of goldenrod from the Sentinel-2 images with F1-score results exceeding 0.9 in any scenario involving any number of homogeneous goldenrod training pixels.
- the best period to identify the goldenrod is the time of flowering, and the highest MDA values were obtained using the September Sentinel-2 and PlanetScope scenes, but the autumn images are not much worse. This may be due to large dry, faded inflorescence panicles, which reflect a large amount of the spectrum characteristic of this species.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Weber, E. The dynamics of plant invasions: A case study of three exotic goldenrod species (Solidago L.) in Europe. J. Biogeogr. 1998, 25, 147–154. [Google Scholar] [CrossRef]
- Abhilasha, D.; Quintana, N.; Vivanco, J.; Joshi, J. Do allelopathic compounds in invasive Solidago canadensis s.l. restrain the native European flora? J. Ecol. 2008, 96, 993–1001. [Google Scholar] [CrossRef]
- Benelli, G.; Pavela, R.; Cianfaglione, K.; Nagy, D.U.; Canale, A.; Maggi, F. Evaluation of two invasive plant invaders in Europe (Solidago canadensis and Solidago gigantea) as possible sources of botanical insecticides. J. Pest Sci. 2019, 92, 805–821. [Google Scholar] [CrossRef]
- General Directorate for Environmental Protection (GDOŚ). List of Alien Plant Species Analyzed in the Project. Available online: http://projekty.gdos.gov.pl/igo-lista-inwazyjnych-gatunkow-obcych-roslin (accessed on 14 June 2023). (In Polish)
- Maxwell, S.L.; Fuller, R.A.; Brooks, T.M.; Watson, J.E.M. Biodiversity: The ravages of guns, nets and bulldozers. Nature 2016, 536, 143–145. [Google Scholar] [CrossRef]
- Niphadkar, M.; Nagendra, H. Remote sensing of invasive plants: Incorporating functional traits into the picture. Int. J. Remote Sens. 2016, 37, 3074–3085. [Google Scholar] [CrossRef]
- Kattenborn, T.; Leitloff, J.; Schiefer, F.; Hinz, S. Review on Convolutional Neural Networks (CNN) in vegetation remote sensing. ISPRS J. Photogramm. Remote Sens. 2021, 173, 24–49. [Google Scholar] [CrossRef]
- Sabat-Tomala, A.; Raczko, E.; Zagajewski, B. Mapping Invasive Plant Species with Hyperspectral Data Based on Iterative Accuracy Assessment Techniques. Remote Sens. 2022, 14, 64. [Google Scholar] [CrossRef]
- Rizaludin Mahmud, M.; Numata, S.; Hosaka, T. Mapping an invasive goldenrod of Solidago altissima in urban landscape of Japan using multi-scale remote sensing and knowledge-based classification. Ecol. Indic. 2020, 111, 105975. [Google Scholar] [CrossRef]
- Akandil, C.; Meier, P.; Otaru, O.; Joshi, J. Mapping invasive giant goldenrod (Solidago gigantea) with multispectral images acquired by unmanned aerial vehicle. J. Digit. Landsc. Archit. 2021, 6, 245–256. [Google Scholar] [CrossRef]
- Ishii, J.; Washitani, I. Early detection of the invasive alien plant Solidago altissima in moist tall grassland using hyperspectral imagery. Int. J. Remote Sens. 2013, 34, 5926–5936. [Google Scholar] [CrossRef]
- Sentinel-2. Satellite Description. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-2/satellite-description (accessed on 23 January 2024).
- Copernicus Browser. Available online: https://dataspace.copernicus.eu/browser/ (accessed on 23 January 2024).
- Tarca, G.; Hoelzle, M.; Guglielmin, M. Using PlanetScope images to investigate the evolution of small glaciers in the Alps. Remote Sens. Appl. Soc. Environ. 2023, 32, 101013. [Google Scholar] [CrossRef]
- PlanetScope Instruments. Available online: https://earth.esa.int/eogateway/missions/planetscope#instruments-section (accessed on 23 January 2024).
- PlanetScope Product Specifications. Available online: https://assets.planet.com/docs/Planet_PSScene_Imagery_Product_Spec_letter_screen.pdf (accessed on 23 January 2024).
- Planet’s Education and Research Program. Available online: https://www.planet.com/markets/education-and-research/?utm_source=google&utm_medium=paid-search&gad_source=1&gclid=Cj0KCQiAsburBhCIARIsAExmsu4y4PtuIaA4hnmoAYdHLH53PYGCK18cRMmJMELRPpCd0oMlHD4pkzEaAvCwEALw_wcB (accessed on 23 January 2024).
- Rajah, P.; Odindi, J.; Mutanga, O.; Kiala, Z. The utility of Sentinel-2 Vegetation Indices (VIs) and Sentinel-1 Synthetic Aperture Radar (SAR) for invasive alien species detection and mapping. Nat. Conserv. 2019, 35, 41–61. [Google Scholar] [CrossRef]
- Nkhwanana, N.; Adam, E.; Ramoelo, A. Assessing the utility of Sentinel-2 MSI in mapping an encroaching Serephium plumosum in South African rangeland. Appl. Geomat. 2022, 14, 435–449. [Google Scholar] [CrossRef]
- Bakacsy, L.; Tobak, Z.; van Leeuwen, B.; Szilassi, P.; Biró, C.; Szatmári, J. Drone-Based Identification and Monitoring of Two Invasive Alien Plant Species in Open Sand Grasslands by Six RGB Vegetation Indices. Drones 2023, 7, 207. [Google Scholar] [CrossRef]
- Royimani, L.; Mutanga, O.; Odindi, J.; Dube, T.; Matongera, T.N. Advancements in satellite remote sensing for mapping and monitoring of alien invasive plant species (AIPs). Phys. Chem. Earth 2019, 112, 237–245. [Google Scholar] [CrossRef]
- Ahmed, N.; Atzberger, C.; Zewdie, W. Species Distribution Modelling performance and its implication for Sentinel-2-based prediction of invasive Prosopis juliflora in lower Awash River basin, Ethiopia. Ecol. Process. 2021, 10, 18. [Google Scholar] [CrossRef]
- Liu, P.; Choo, K.-K.R.; Wang, L.; Huang, F. SVM or deep learning? A comparative study on remote sensing image classification. Soft Comput. 2017, 21, 7053–7065. [Google Scholar] [CrossRef]
- Bergamo, T.F.; de Lima, R.S.; Kull, T.; Ward, R.D.; Sepp, K.; Villoslada, M. From UAV to PlanetScope: Upscaling fractional cover of an invasive species Rosa rugosa. J. Environ. Manag. 2023, 336, 117693. [Google Scholar] [CrossRef] [PubMed]
- Haq, M.A.; Azam, M.F.; Vincent, C. Efficiency of artificial neural networks for glacier ice-thickness estimation: A case study in western Himalaya, India. J. Glaciol. 2021, 67, 671–684. [Google Scholar] [CrossRef]
- Waśniewski, A.; Hościło, A.; Zagajewski, B.; Moukétou-Tarazewicz, D. Assessment of Sentinel-2 Satellite Images and Random Forest Classifier for Rainforest Mapping in Gabon. Forests 2020, 11, 941. [Google Scholar] [CrossRef]
- Bhuiyan, M.A.E.; Witharana, C.; Liljedahl, A.K.; Jones, B.M.; Daanen, R.; Epstein, H.E.; Kent, K.; Griffin, C.G.; Agnew, A. Understanding the Effects of Optimal Combination of Spectral Bands on Deep Learning Model Predictions: A Case Study Based on Permafrost Tundra Landform Mapping Using High Resolution Multispectral Satellite Imagery. J. Imaging 2020, 6, 97. [Google Scholar] [CrossRef] [PubMed]
- Papp, L.; van Leeuwen, B.; Szilassi, P.; Tobak, Z.; Szatmári, J.; Árvai, M.; Mészáros, J.; Pásztor, L. Monitoring Invasive Plant Species Using Hyperspectral Remote Sensing Data. Land 2021, 10, 29. [Google Scholar] [CrossRef]
- Jensen, T.; Seerup Hass, F.; Seam Akbar, M.; Holm Petersen, P.; Jokar Arsanjani, J. Employing Machine Learning for Detection of Invasive Species using Sentinel-2 and AVIRIS Data: The Case of Kudzu in the United States. Sustainability 2020, 12, 3544. [Google Scholar] [CrossRef]
- Lake, T.A.; Briscoe Runquist, R.D.; Moeller, D.A. Deep learning detects invasive plant species across complex landscapes using Worldview-2 and Planetscope satellite imagery. Remote Sens. Ecol. Conserv. 2022, 8, 875–889. [Google Scholar] [CrossRef]
- Weisberg, P.J.; Dilts, T.E.; Greenberg, J.A.; Johnson, K.N.; Pai, H.; Sladek, C.; Kratt, C.; Tyler, S.W.; Ready, A. Phenology-based classification of invasive annual grasses to the species level. Remote Sens. Environ. 2021, 263, 112568. [Google Scholar] [CrossRef]
- Nagy, D.U.; Rauschert, E.S.J.; Henn, T.; Cianfaglione, K.; Stranczinger, S.; Pal, R.W. The more we do, the less we gain? Balancing effort and efficacy in managing the Solidago gigantea invasion. Weed Res. 2020, 60, 232–240. [Google Scholar] [CrossRef]
- COAH, ESA’s Copernicus Open Access Hub. 2022. Available online: https://scihub.copernicus.eu/ (accessed on 1 December 2022).
- PE, PlanetScope Explorer. 2022. Available online: https://www.planet.com/explorer/ (accessed on 18 December 2022).
- Kluczek, M.; Zagajewski, B.; Zwijacz-Kozica, T. Mountain Tree Species Mapping Using Sentinel-2, PlanetScope, and Airborne HySpex Hyperspectral Imagery. Remote Sens. 2023, 15, 844. [Google Scholar] [CrossRef]
- Zdunek, K.B. Assessment of Sentinel-2 Satellite Images for the Identification of Goldenrod Species (Solidago spp.). Bachelor’s Thesis, Geography within Inter-faculty Individual Studies in Mathematics and Natural Sciences. University of Warsaw, Warsaw, Poland, 30 June 2022; p. 39. [Google Scholar]
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library. Open Source Geospatial Foundation. 2022. Available online: https://gdal.org/ (accessed on 10 November 2022).
- Shao, G.; Tang, L.; Liao, J. Overselling overall map accuracy misinforms about research reliability. Landsc. Ecol. 2019, 34, 2487–2492. [Google Scholar] [CrossRef]
- Zagajewski, B.; Kluczek, M.; Raczko, E.; Njegovec, A.; Dabija, A.; Kycko, M. Comparison of Random Forest, Support Vector Machines, and Neural Networks for Post-Disaster Forest Species Mapping of the Krkonoše/Karkonosze Transboundary Biosphere Reserve. Remote Sens. 2021, 13, 2581. [Google Scholar] [CrossRef]
- Dao, P.D.; Axiotis, A.; He, Y. Mapping native and invasive grassland species and characterizing topography-driven species dynamics using high spatial resolution hyperspectral imagery. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102542. [Google Scholar] [CrossRef]
- Mouta, N.; Silva, R.; Pais, S.; Alonso, J.M.; Gonçalves, J.F.; Honrado, J.; Vicente, J.R. ‘The Best of Two Worlds’—Combining Classifier Fusion and Ecological Models to Map and Explain Landscape Invasion by an Alien Shrub. Remote Sens. 2021, 13, 3287. [Google Scholar] [CrossRef]
- Gholizadeh, H.; Friedman, M.S.; McMillan, N.A.; Hammond, W.M.; Hassani, K.; Sams, A.V.; Charles, M.D.; Garrett, D.R.; Joshi, O.; Hamilton, R.G.; et al. Mapping invasive alien species in grassland ecosystems using airborne imaging spectroscopy and remotely observable vegetation functional traits. Remote Sens. Environ. 2022, 271, 112887. [Google Scholar] [CrossRef]
- Li, H.-D.; Zeng, M.-M.; Tan, B.-B.; Liang, Y.-Z.; Xu, Q.-S.; Cao, D.-S. Recipe for revealing informative metabolites based on model population analysis. Metabolomics 2010, 6, 353–361. [Google Scholar] [CrossRef]
- Kycko, M.; Zagajewski, B.; Zwijacz-Kozica, M.; Cierniewski, J.; Romanowska, E.; Orłowska, K.; Ochtyra, A.; Jarocińska, A. Assessment of Hyperspectral Remote Sensing for Analyzing the Impact of Human Trampling on Alpine Swards. Mt. Res. Dev. 2017, 37, 66–74. [Google Scholar] [CrossRef]
- Zagajewski, B.; Kycko, M.; Tømmervik, H.; Bochenek, Z.; Wojtuń, B.; Bjerke, J.W.; Kłos, A. Feasibility of hyperspectral vegetation indices for the detection of chlorophyll concentration in three high Arctic plants: Salix polaris, Bistorta vivipara, and Dryas octopetala. Acta Soc. Bot. Pol. 2018, 87, 3604. [Google Scholar] [CrossRef]
- Raczko, E.; Krówczyńska, M.; Wilk, E. Asbestos roofing recognition by use of convolutional neural networks and high-resolution aerial imagery. Testing different scenarios. Build. Environ. 2022, 217, 109092. [Google Scholar] [CrossRef]
- Smerdu, A.; Kanjir, U.; Kokalj, Ž. Automatic detection of Japanese knotweed in urban areas from aerial and satellite data. Manag. Biol. Invasions 2020, 11, 661–676. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Xi, Y.; Ren, C.; Tian, Q.; Ren, Y.; Dong, X.; Zhang, Z. Exploitation of Time Series Sentinel-2 Data and Different Machine Learning Algorithms for Detailed Tree Species Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7589–7603. [Google Scholar] [CrossRef]
- Wang, W.; Tang, J.; Zhang, N.; Wang, Y.; Xu, X.; Zhang, A. Spatiotemporal Pattern of Invasive Pedicularis in the Bayinbuluke Land, China, during 2019–2021: An Analysis Based on PlanetScope and Sentinel-2 Data. Remote Sens. 2023, 15, 4383. [Google Scholar] [CrossRef]
- Marzialetti, F.; Di Febbraro, M.; Frate, L.; De Simone, W.; Acosta, A.T.R.; Carranza, M.L. Synergetic use of unmanned aerial vehicle and satellite images for detecting non-native tree species: An insight into Acacia saligna invasion in the Mediterranean coast. Front. Environ. Sci. 2022, 10, 880626. [Google Scholar] [CrossRef]
- Rakotoarivony, M.N.A.; Gholizadeh, H.; Hammond, W.M.; Hassani, K.; Joshi, O.; Hamilton, R.G.; Fuhlendorf, S.D.; Trowbridge, A.M.; Adams, H.D. Detecting the invasive Lespedeza cuneata in grasslands using commercial small satellite imagery. Int. J. Remote Sens. 2023, 44, 6802–6824. [Google Scholar] [CrossRef]
- Han, X.; Wang, Y.; Ke, Y.; Liu, T.; Zhou, D. Phenological heterogeneities of invasive Spartina alterniflora salt marshes revealed by high-spatial-resolution satellite imagery. Ecol. Indic. 2022, 144, 109492. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel-2 | PlanetScope | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bands | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 8A | 9 | 11 | 12 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Central wavelength (nm) | 443 | 490 | 560 | 665 | 705 | 740 | 783 | 842 | 865 | 940 | 1610 | 2190 | 443 | 490 | 531 | 565 | 610 | 665 | 705 | 865 |
| Interoperable with Sentinel-2 | – | – | – | – | – | – | – | – | – | – | – | – | 1 | 2 | NA | 3 | NA | 4 | 5 | 8a |
| Spatial resolution (m) | 60 | 10 | 10 | 10 | 20 | 20 | 20 | 10 | 20 | 60 | 20 | 20 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| Available temporal resolution (days) | 5 | 1 | ||||||||||||||||||
| Radiometric resolution (bits) | 12 | 16 | ||||||||||||||||||
| Orbit altitude | 786 km (98.62°; heliosynchronous) | 475–525 km (~98°; heliosynchronous); PSB.SD | ||||||||||||||||||
| Frame size | swath width: 290 km | 32.5 km × 19.6 km; PSB.SD | ||||||||||||||||||
| Sentinel-2 | PlanetScope | ||
|---|---|---|---|
| Number of Polygons | Number of Pixels | Number of Pixels | |
| goldenrod | 54 | 1254 | 9993 |
| mix | 43 | 1922 | 10,999 |
| forest | 40 | 46,568 | 754,738 |
| agriculture crops | 75 | 38,580 | 491,142 |
| built-up areas | 55 | 25,941 | 108,968 |
| surface waters | 27 | 96,505 | 859,943 |
| RF | SVM | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Training pixels | 50 | 100 | 150 | 200 | 300 | 400 | 500 | 600 | 700 | 50 | 100 | 150 | 200 | 300 | 400 | 500 | 600 | 700 |
| 1st | 0.93 | 0.93 | 0.94 | 0.94 | 0.94 | 0.94 | 0.95 | 0.95 | 0.94 | 0.92 | 0.93 | 0.93 | 0.94 | 0.93 | 0.94 | 0.93 | 0.94 | 0.93 |
| 2nd | 0.92 | 0.92 | 0.94 | 0.93 | 0.94 | 0.94 | 0.94 | 0.94 | 0.94 | 0.91 | 0.93 | 0.92 | 0.93 | 0.92 | 0.93 | 0.93 | 0.92 | 0.93 |
| 3rd | 0.92 | 0.92 | 0.93 | 0.93 | 0.93 | 0.93 | 0.93 | 0.94 | 0.94 | 0.91 | 0.92 | 0.92 | 0.92 | 0.92 | 0.93 | 0.92 | 0.92 | 0.92 |
| F1-score > 0.90 | 10 | 12 | 19 | 17 | 16 | 22 | 31 | 28 | 35 | 5 | 11 | 13 | 6 | 8 | 10 | 6 | 13 | 13 |
| Median | 0.73 | 0.77 | 0.81 | 0.82 | 0.84 | 0.86 | 0.87 | 0.86 | 0.87 | 0.65 | 0.73 | 0.74 | 0.74 | 0.77 | 0.79 | 0.79 | 0.80 | 0.81 |
| Mean | 0.70 | 0.73 | 0.76 | 0.76 | 0.79 | 0.81 | 0.82 | 0.82 | 0.82 | 0.65 | 0.70 | 0.70 | 0.69 | 0.72 | 0.73 | 0.72 | 0.74 | 0.74 |
| RF | SVM | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Training pixels | 50 | 100 | 150 | 200 | 300 | 400 | 500 | 600 | 700 | 1000 | 50 | 100 | 150 | 200 | 300 | 400 | 500 | 600 | 700 | 1000 |
| 1st | 0.94 | 0.95 | 0.94 | 0.92 | 0.94 | 0.95 | 0.94 | 0.94 | 0.94 | 0.95 | 0.93 | 0.94 | 0.93 | 0.93 | 0.94 | 0.94 | 0.92 | 0.93 | 0.94 | 0.95 |
| 2nd | 0.91 | 0.93 | 0.93 | 0.92 | 0.93 | 0.93 | 0.93 | 0.94 | 0.93 | 0.95 | 0.91 | 0.92 | 0.92 | 0.92 | 0.93 | 0.93 | 0.91 | 0.93 | 0.94 | 0.92 |
| 3rd | 0.90 | 0.92 | 0.92 | 0.92 | 0.93 | 0.93 | 0.93 | 0.93 | 0.93 | 0.93 | 0.90 | 0.90 | 0.92 | 0.91 | 0.92 | 0.92 | 0.91 | 0.92 | 0.93 | 0.92 |
| >0.90 | 3 | 12 | 12 | 8 | 13 | 16 | 16 | 16 | 20 | 20 | 4 | 3 | 5 | 4 | 7 | 8 | 8 | 9 | 12 | 7 |
| Median | 0.58 | 0.66 | 0.59 | 0.62 | 0.62 | 0.65 | 0.64 | 0.65 | 0.64 | 0.67 | 0.39 | 0.39 | 0.39 | 0.41 | 0.40 | 0.42 | 0.40 | 0.43 | 0.42 | 0.40 |
| Mean | 0.59 | 0.64 | 0.63 | 0.62 | 0.64 | 0.66 | 0.66 | 0.66 | 0.67 | 0.68 | 0.45 | 0.45 | 0.44 | 0.48 | 0.48 | 0.48 | 0.48 | 0.50 | 0.49 | 0.49 |
| Sentinel-2 | |||||||
|---|---|---|---|---|---|---|---|
| Band | 9 September 2021 | 29 October 2021 | 3 November 2021 | Mean | Order | Range | Central wavelength (nm) |
| B1 | 16.90 | 35.81 | 39.63 | 30.78 | 1 | Coastal aerosol | 442.7 |
| B2 | 23.07 | 24.13 | 17.02 | 21.41 | 7 | Blue | 492.4 |
| B3 | 34.75 | 17.54 | 15.19 | 22.49 | 3 | Green | 559.8 |
| B4 | 24.88 | 22.78 | 18.96 | 22.21 | 5 | Red | 664.6 |
| B5 | 34.45 | 15.79 | 14.27 | 21.50 | 6 | Red-edge | 704.1 |
| B6 | 17.44 | 16.29 | 12.55 | 15.43 | 12 | Red-edge | 740.5 |
| B7 | 18.62 | 16.06 | 11.79 | 15.49 | 11 | Red-edge | 782.8 |
| B8 | 21.79 | 16.9 | 11.34 | 16.68 | 10 | NIR | 832.8 |
| B8A | 21.58 | 18.19 | 11.73 | 17.17 | 9 | Narrow NIR | 864.7 |
| B9 | 30.19 | 17.72 | 21.92 | 23.28 | 2 | NIR | 945.1 |
| B11 | 23.65 | 19.93 | 15.38 | 19.65 | 8 | SWIR | 1613.7 |
| B12 | 28.40 | 20.13 | 18.24 | 22.26 | 4 | SWIR | 2202.4 |
| Mean | 24.64 | 20.11 | 17.34 | ||||
| PlanetScope | |||||||
| Band | 11 September 2021 | 30 October 2021 | 3 November 2021 | Mean | Order | Range | Central wavelength (nm) |
| B1 | 16.11 | 9.27 | 14.85 | 13.41 | 6 | Coastal blue | 443 |
| B2 | 12.56 | 15.24 | 13.75 | 13.85 | 4 | Blue | 490 |
| B3 | 8.13 | 15.02 | 12.23 | 11.79 | 7 | Green I | 531 |
| B4 | 15.71 | 11.58 | 13.72 | 13.67 | 5 | Green II | 565 |
| B5 | 11.39 | 6.93 | 11.13 | 9.82 | 8 | Yellow | 610 |
| B6 | 28.25 | 7.16 | 16.86 | 17.42 | 2 | Red | 665 |
| B7 | 17.45 | 18.82 | 8.58 | 14.95 | 3 | Red-edge | 705 |
| B8 | 30.49 | 15.58 | 15.73 | 20.60 | 1 | NIR | 865 |
| Mean | 17.51 | 12.45 | 13.36 | ||||
| RF | OA = 0.97 | |||||||
|---|---|---|---|---|---|---|---|---|
| forest | mix | goldenrod | crops | water | built-up | PA | F1 | |
| forest | 16,865 | 0 | 0 | 0 | 1 | 13 | 1.00 | 0.99 |
| mix | 56 | 767 | 28 | 21 | 0 | 78 | 0.81 | 0.85 |
| goldenrod | 0 | 16 | 746 | 3 | 0 | 3 | 0.97 | 0.96 |
| crops | 79 | 31 | 12 | 13,718 | 0 | 61 | 0.99 | 0.95 |
| water | 3 | 0 | 0 | 0 | 18,502 | 0 | 1.00 | 1.00 |
| built-up | 171 | 33 | 8 | 1370 | 1 | 11,529 | 0.88 | 0.93 |
| UA | 0.98 | 0.91 | 0.94 | 0.91 | 1.00 | 0.99 | ||
| SVM | OA = 0.99 | |||||||
| forest | mix | goldenrod | crops | water | built-up | PA | F1 | |
| forest | 17,018 | 3 | 0 | 22 | 36 | 31 | 0.99 | 0.99 |
| mix | 73 | 776 | 37 | 27 | 0 | 59 | 0.80 | 0.85 |
| goldenrod | 10 | 17 | 746 | 0 | 0 | 23 | 0.94 | 0.94 |
| crops | 57 | 50 | 8 | 14,969 | 0 | 91 | 0.99 | 0.99 |
| water | 11 | 0 | 0 | 0 | 18,454 | 45 | 1.00 | 1.00 |
| built-up | 5 | 1 | 3 | 94 | 14 | 11,435 | 0.99 | 0.98 |
| UA | 0.99 | 0.92 | 0.94 | 0.99 | 1.00 | 0.98 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zagajewski, B.; Kluczek, M.; Zdunek, K.B.; Holland, D. Sentinel-2 versus PlanetScope Images for Goldenrod Invasive Plant Species Mapping. Remote Sens. 2024, 16, 636. https://doi.org/10.3390/rs16040636
Zagajewski B, Kluczek M, Zdunek KB, Holland D. Sentinel-2 versus PlanetScope Images for Goldenrod Invasive Plant Species Mapping. Remote Sensing. 2024; 16(4):636. https://doi.org/10.3390/rs16040636
Chicago/Turabian StyleZagajewski, Bogdan, Marcin Kluczek, Karolina Barbara Zdunek, and David Holland. 2024. "Sentinel-2 versus PlanetScope Images for Goldenrod Invasive Plant Species Mapping" Remote Sensing 16, no. 4: 636. https://doi.org/10.3390/rs16040636
APA StyleZagajewski, B., Kluczek, M., Zdunek, K. B., & Holland, D. (2024). Sentinel-2 versus PlanetScope Images for Goldenrod Invasive Plant Species Mapping. Remote Sensing, 16(4), 636. https://doi.org/10.3390/rs16040636