

Effectiveness of Management Zones Delineated from UAV and Sentinel-2 Data for Precision Viticulture Applications
 , , , , , ,
, , , , , ,  and
and
Abstract
1. Introduction
2. Materials and Methods
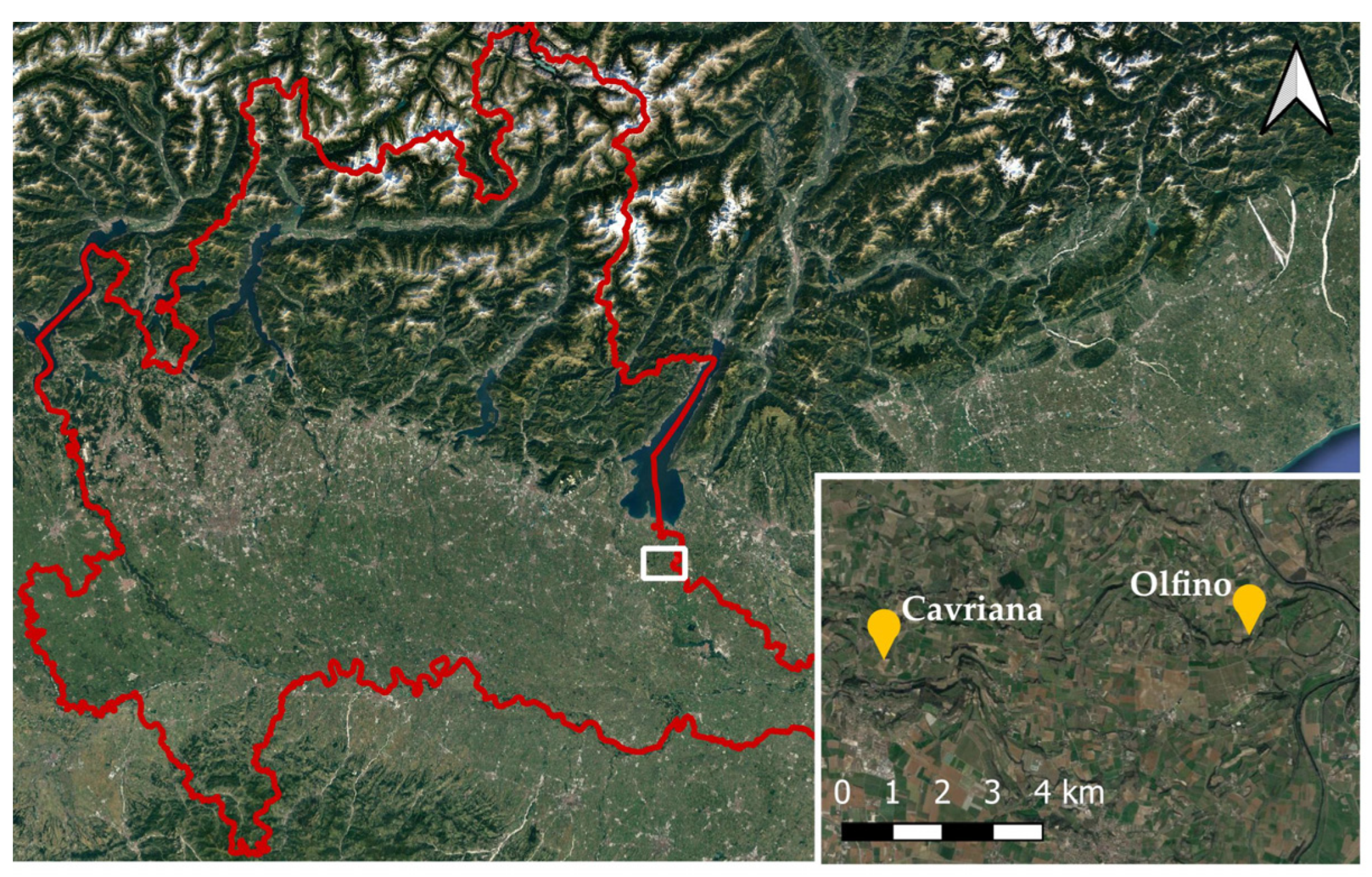
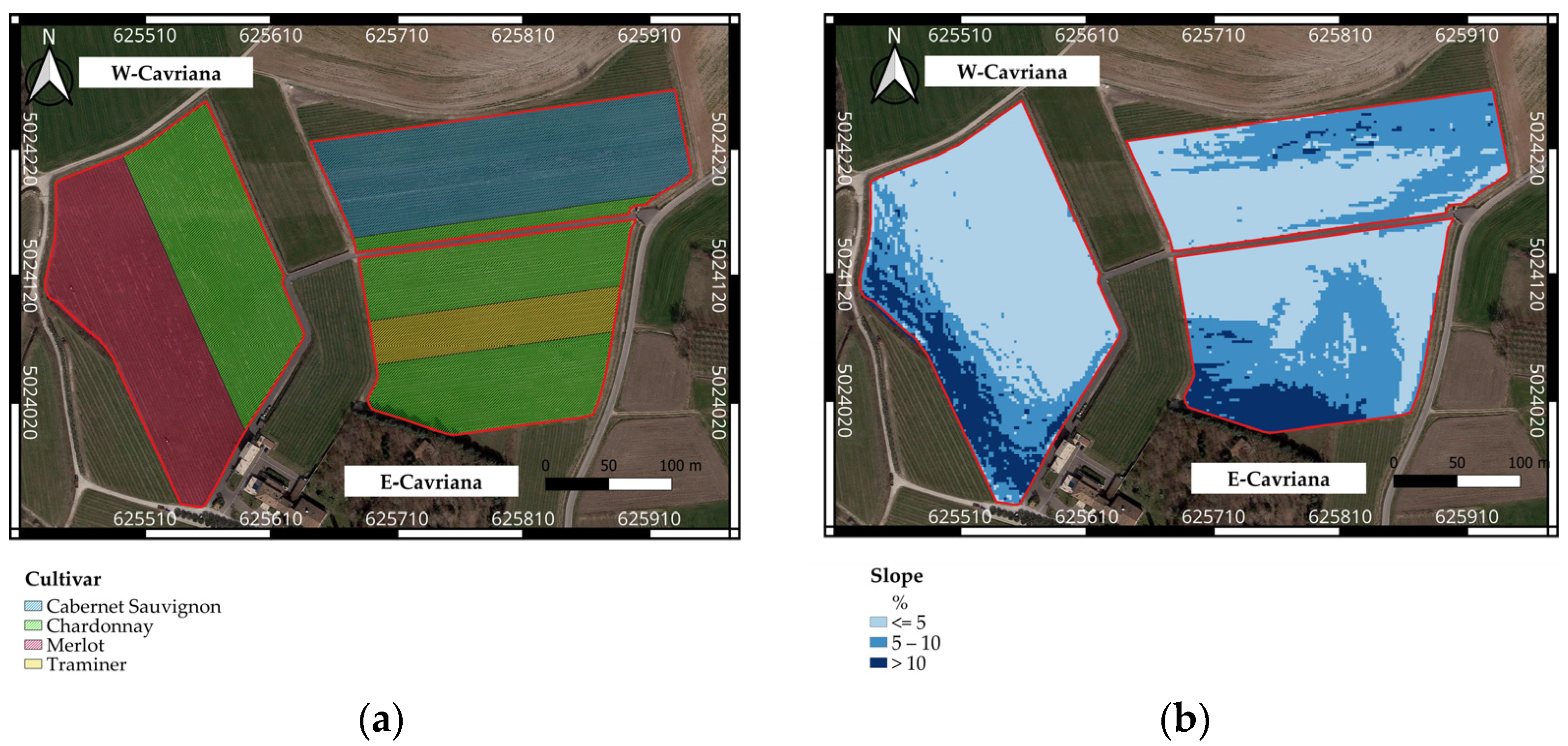
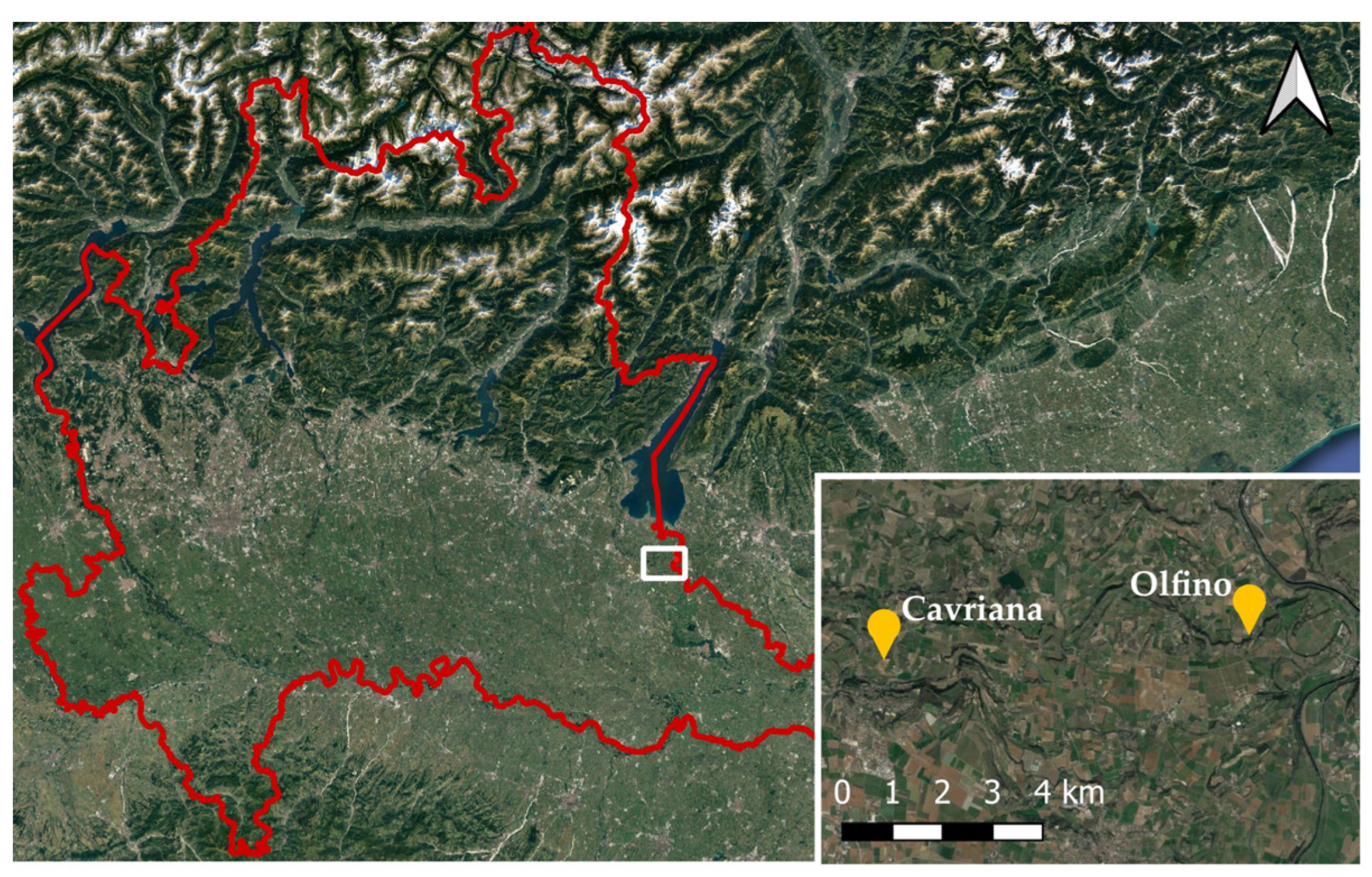
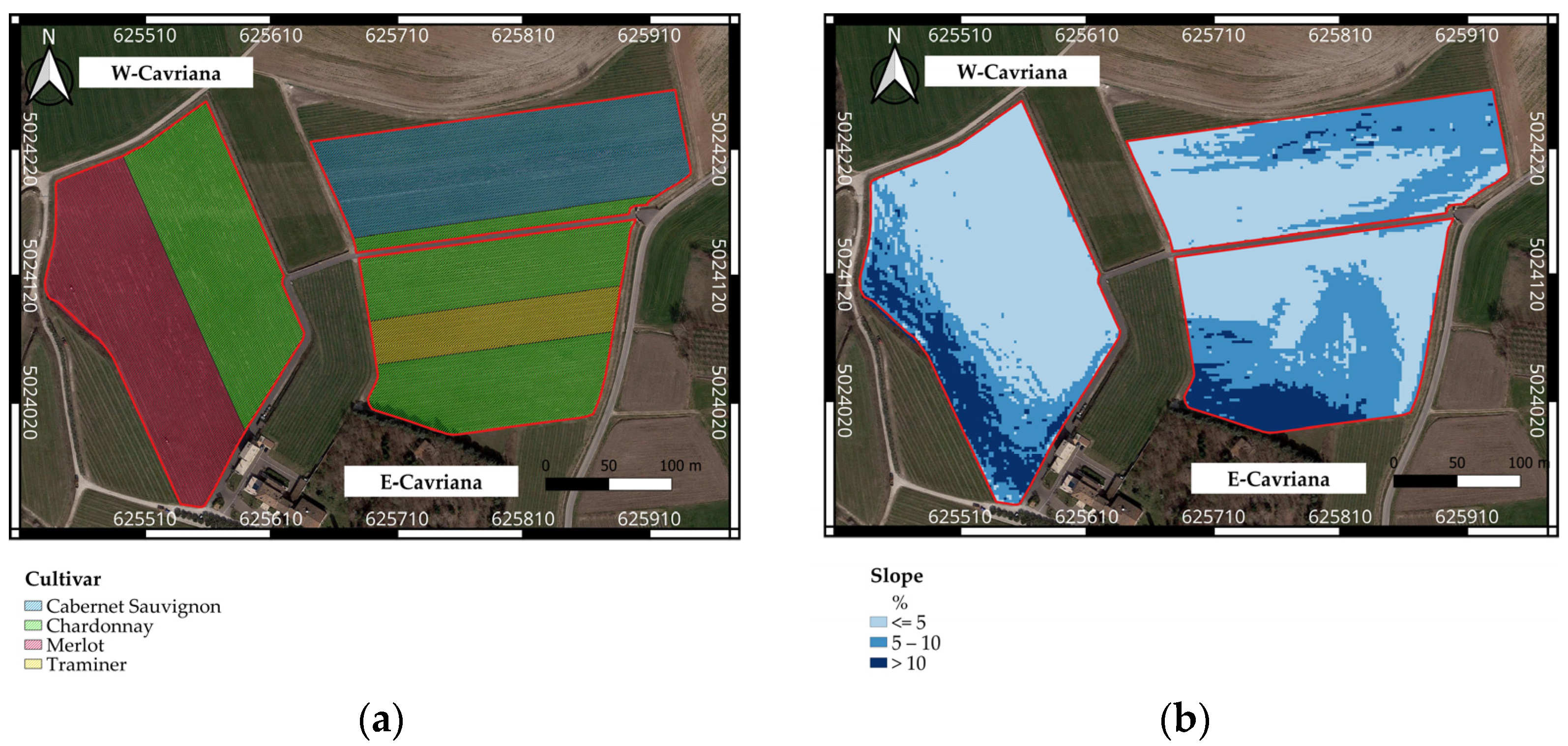
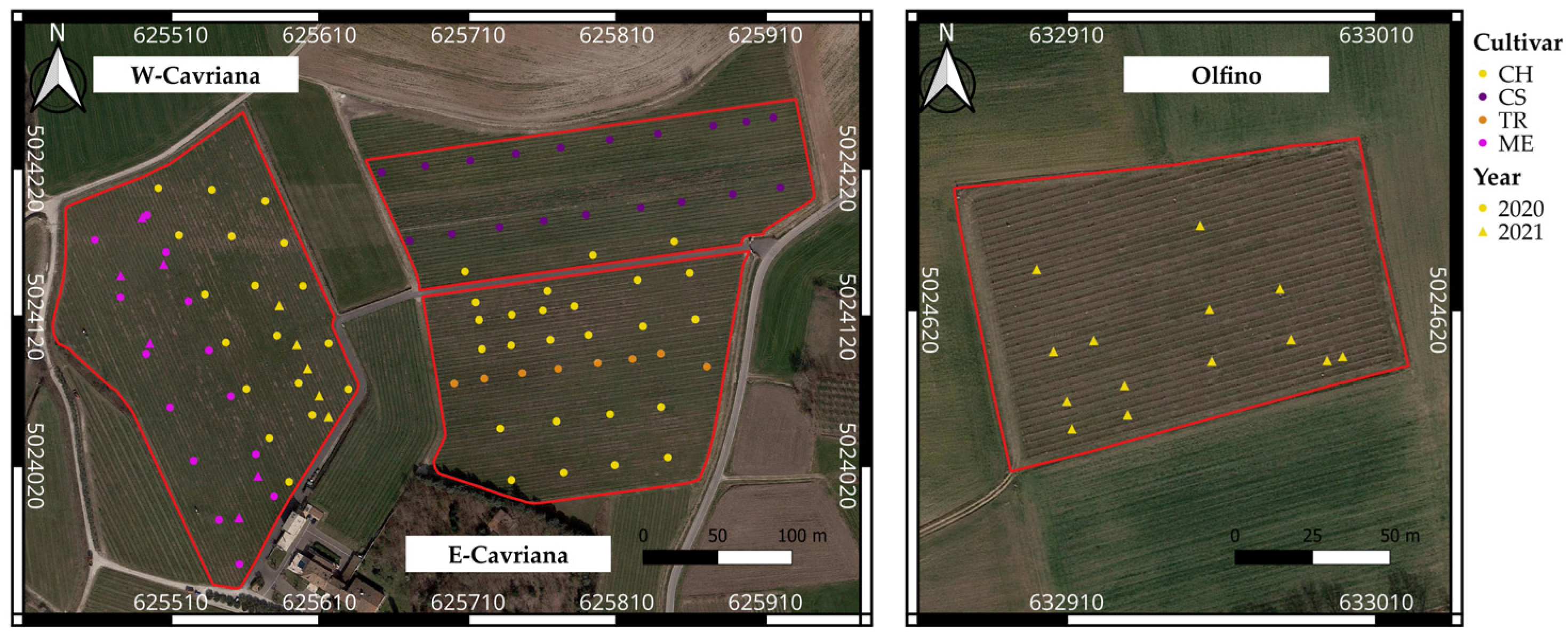
2.1. Experimental Sites
2.1.1. Field-Scale Site
2.1.2. Farm-Scale Site
2.2. UAV Surveys
2.3. Satellite Images
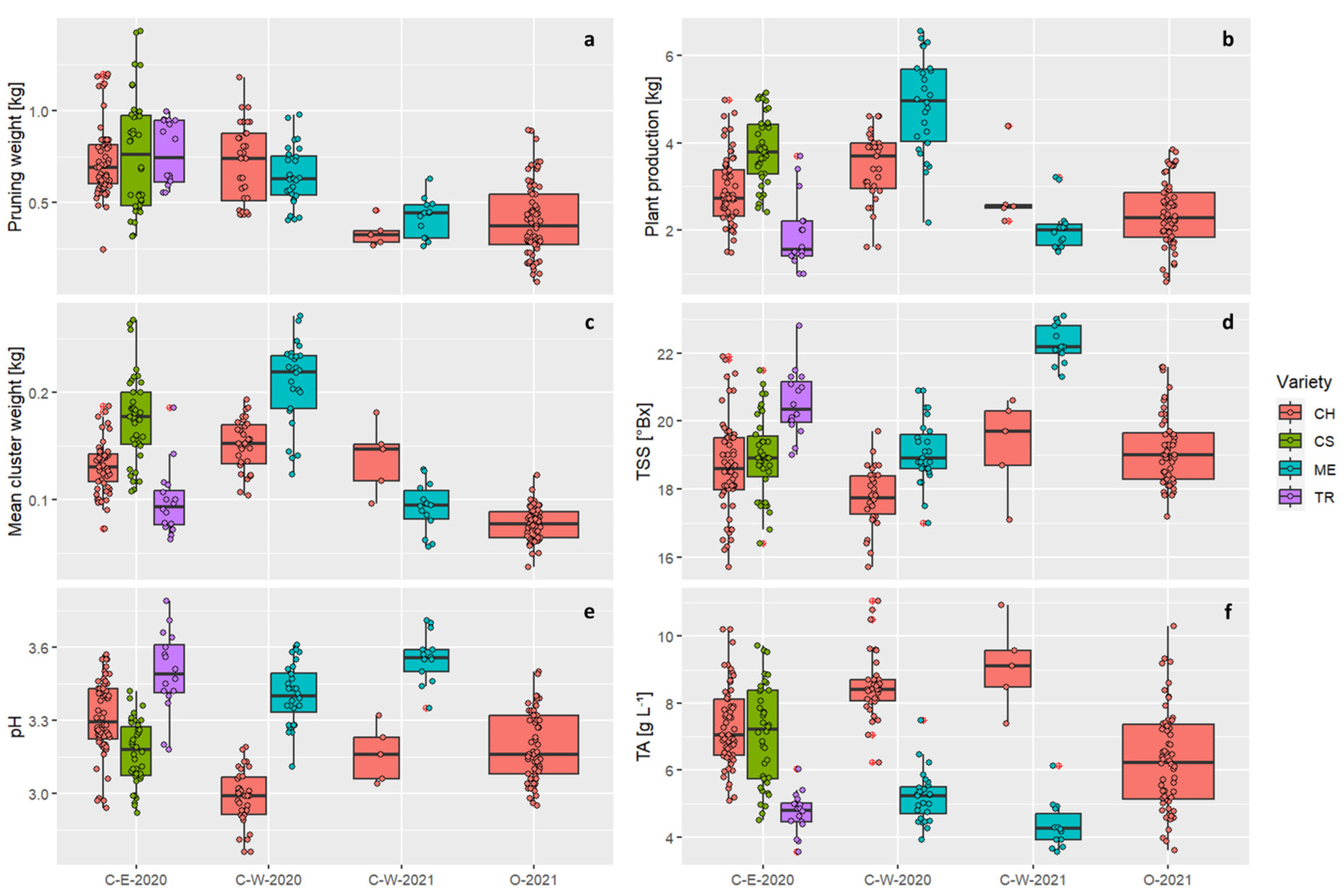
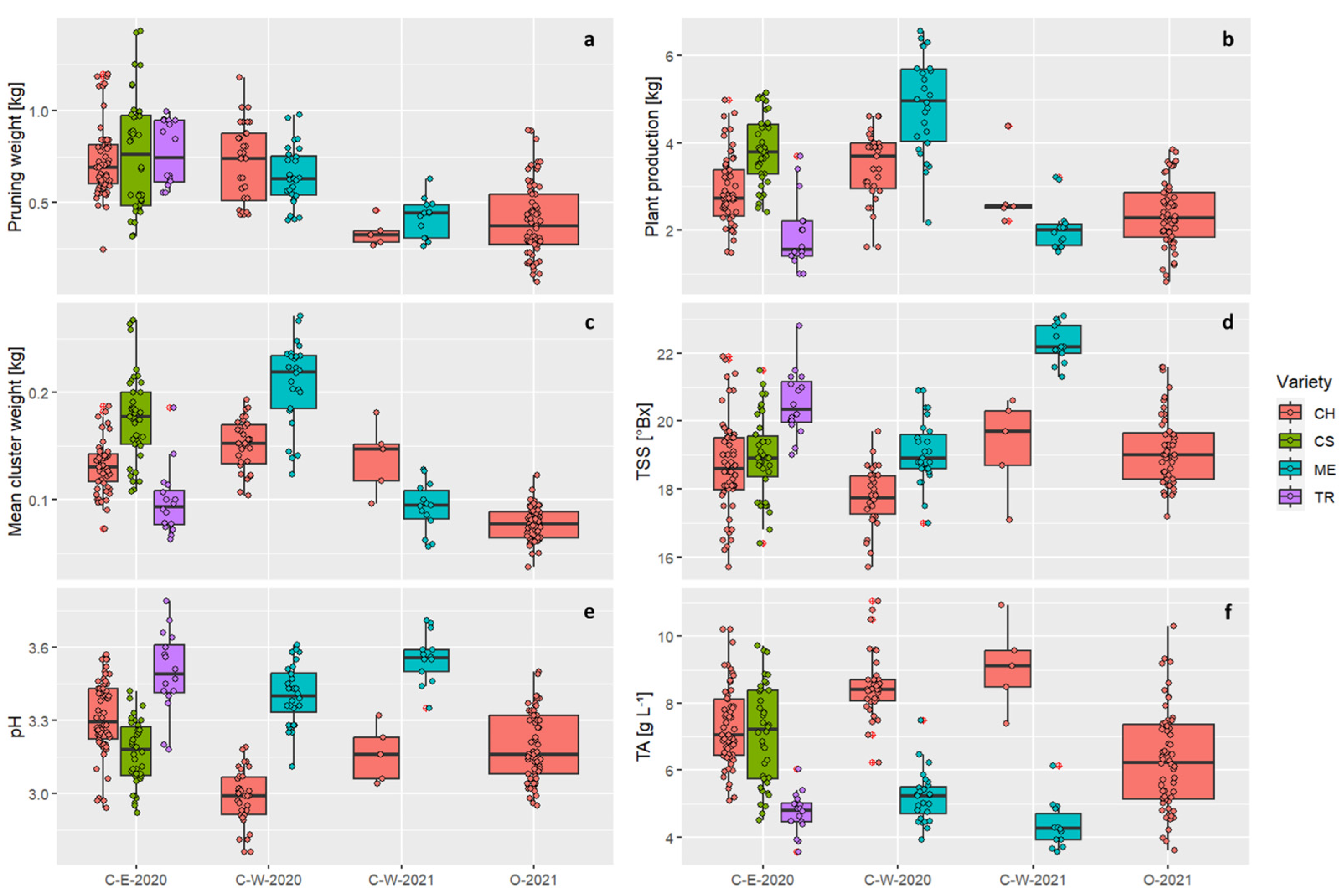
2.4. Vine Vigor, Grape Yield, and Quality Data
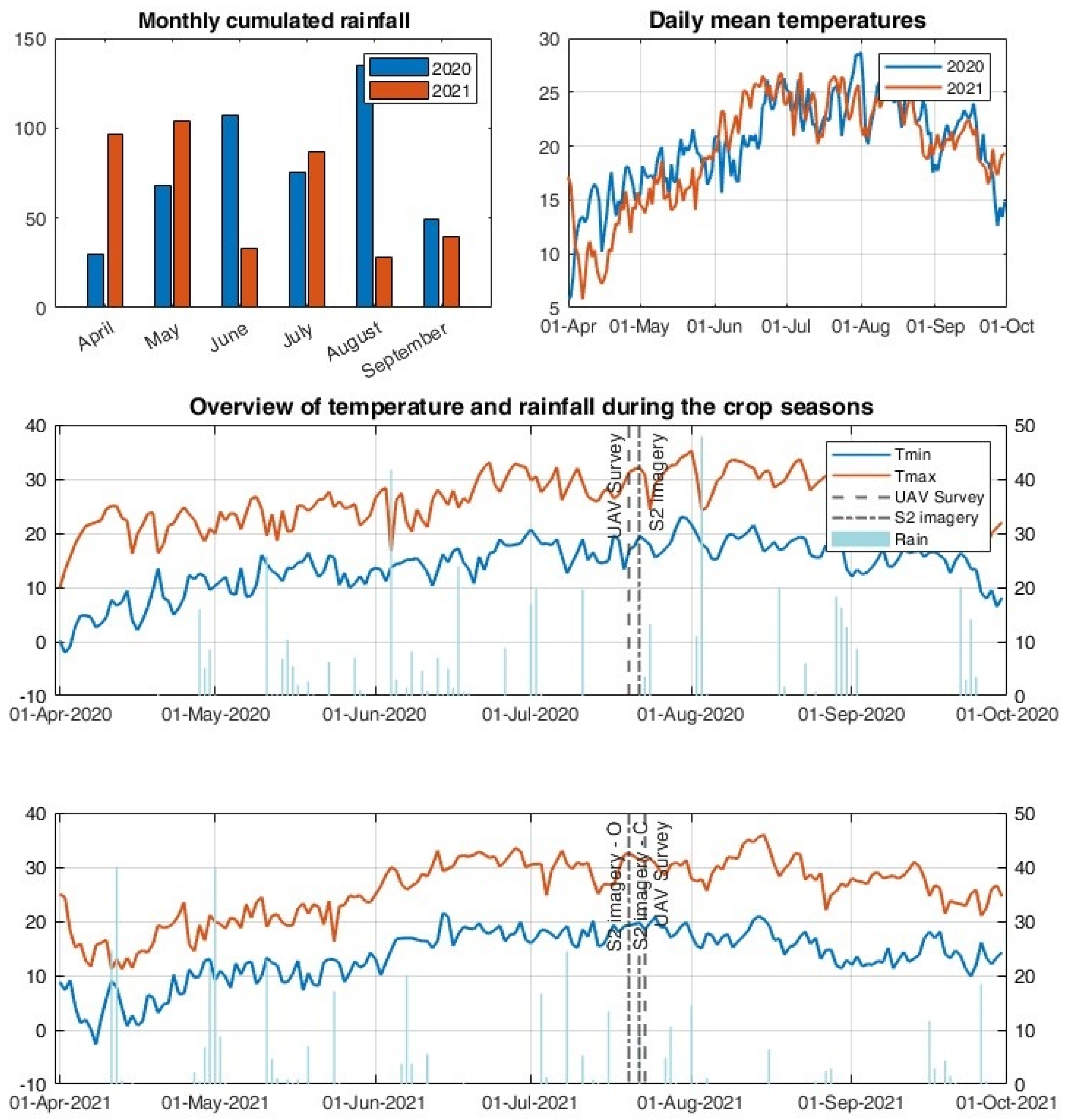
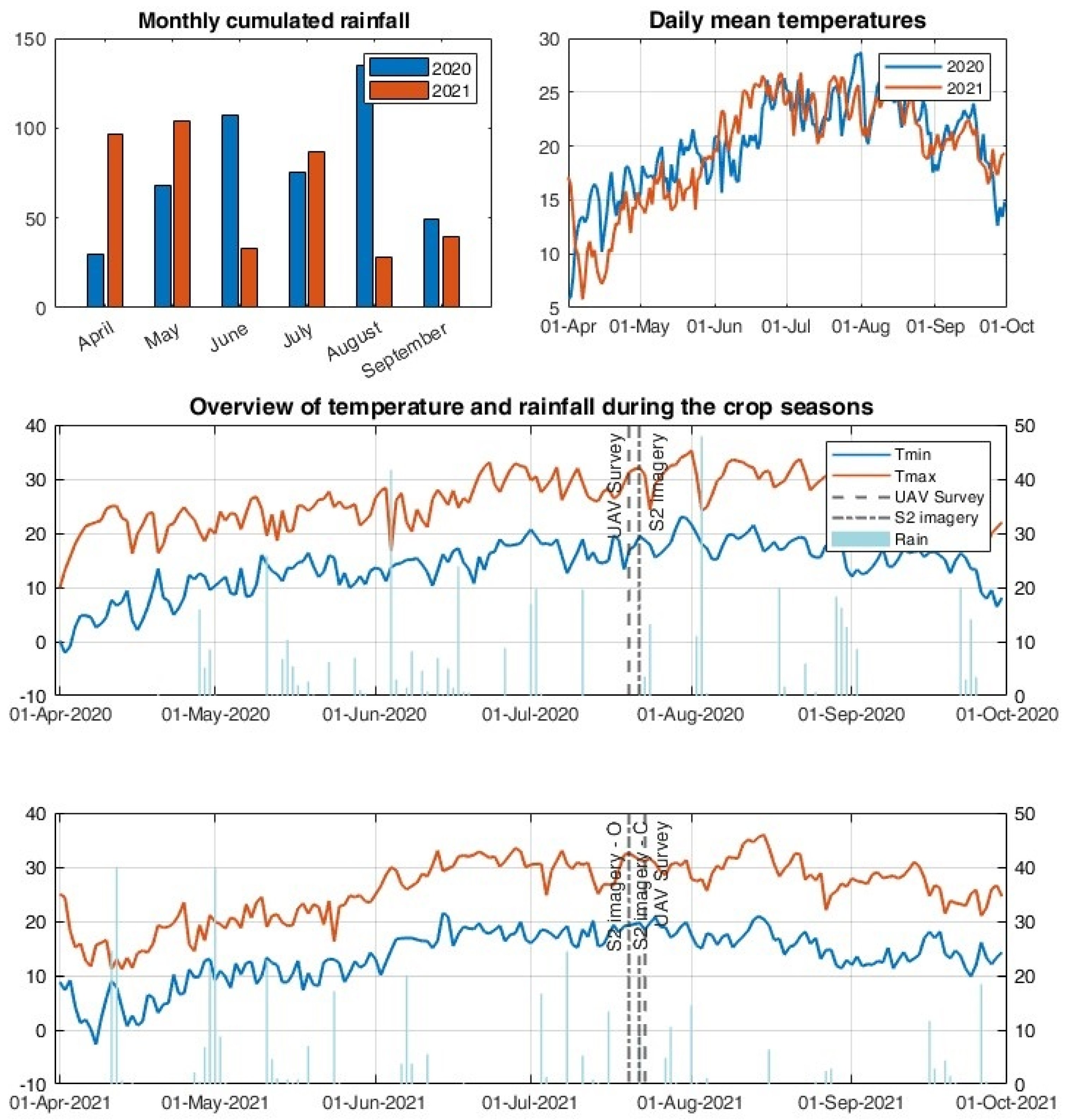
2.5. Agrometeorological Conditions in the 2020 and 2021 Seasons
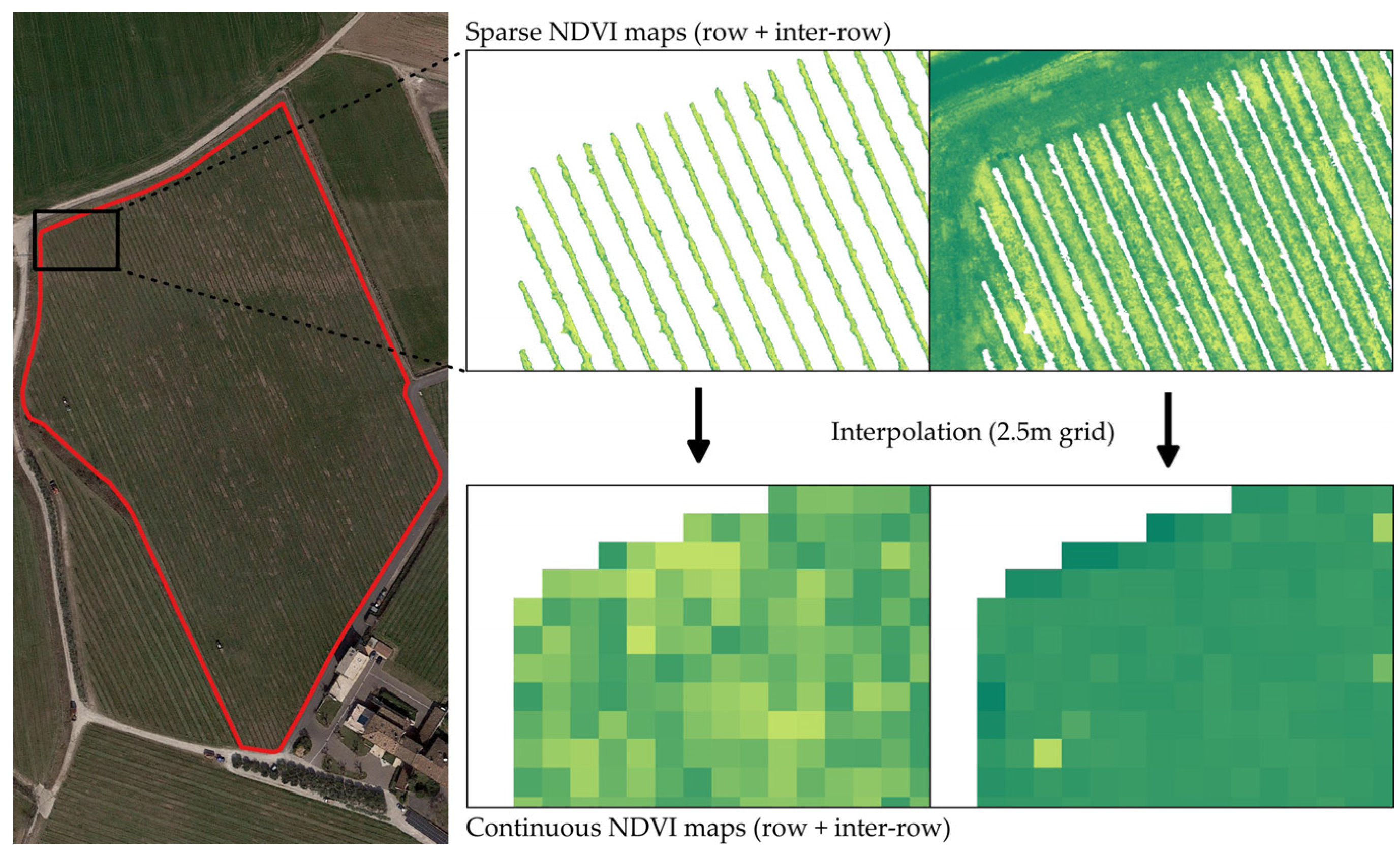
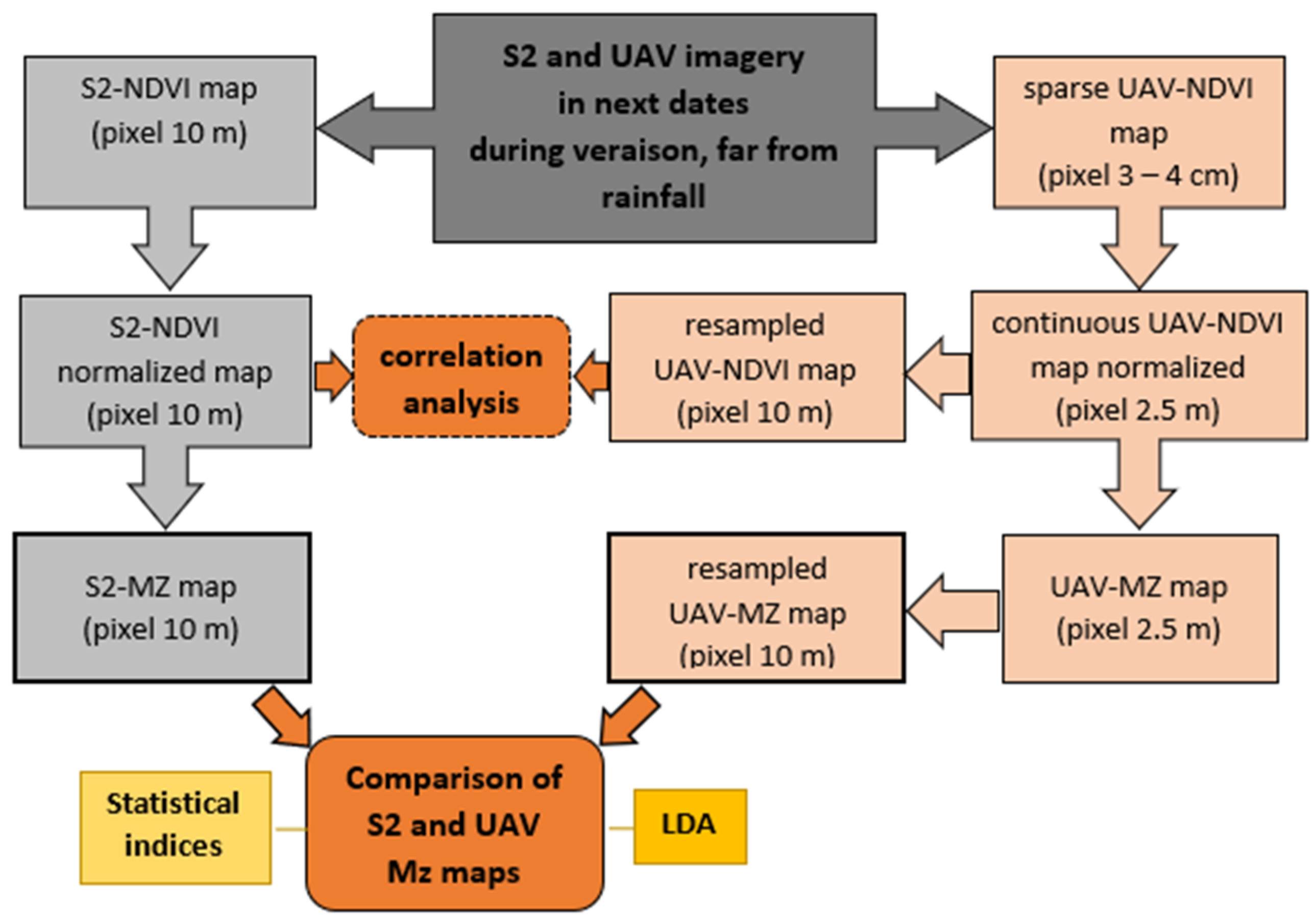
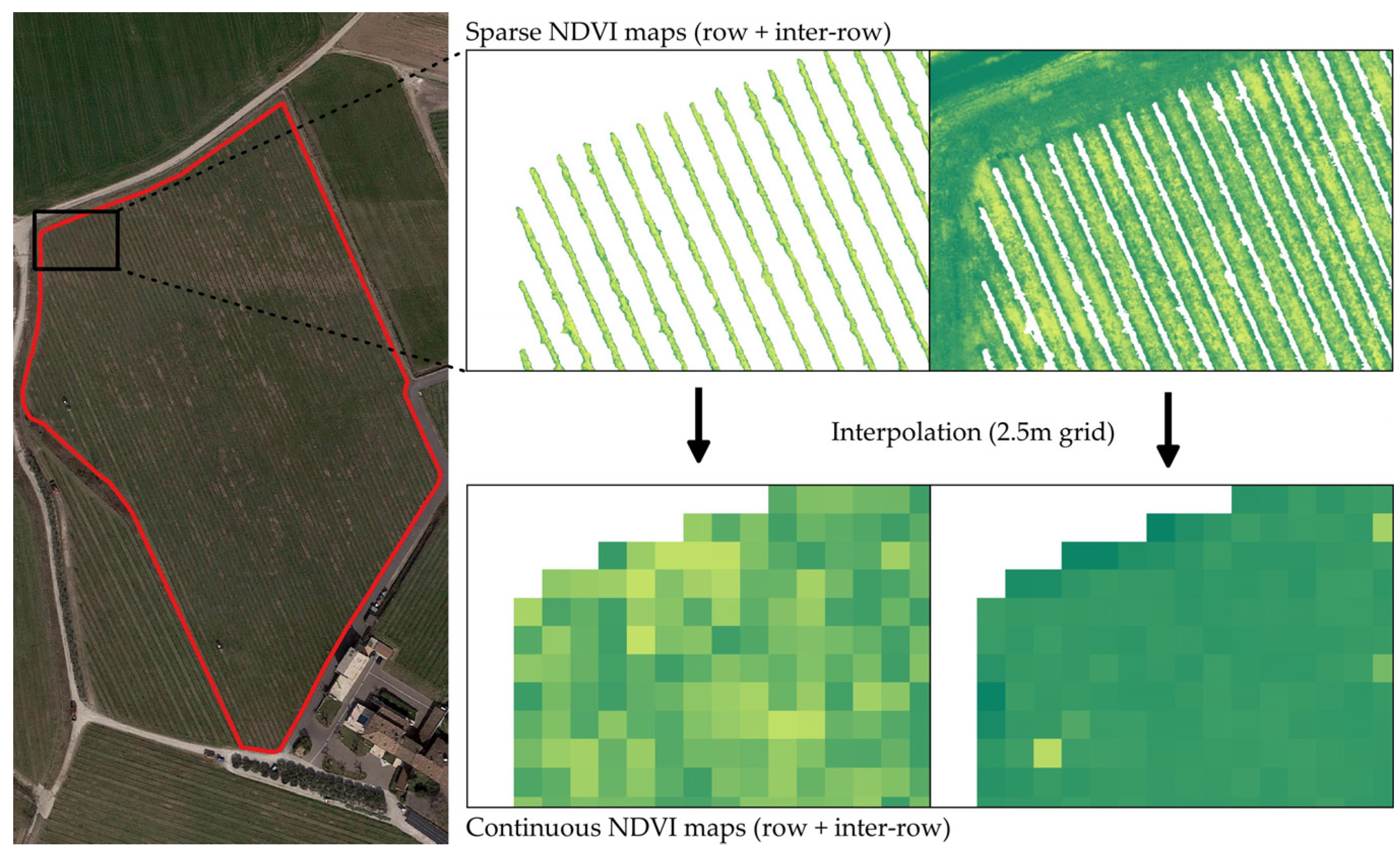
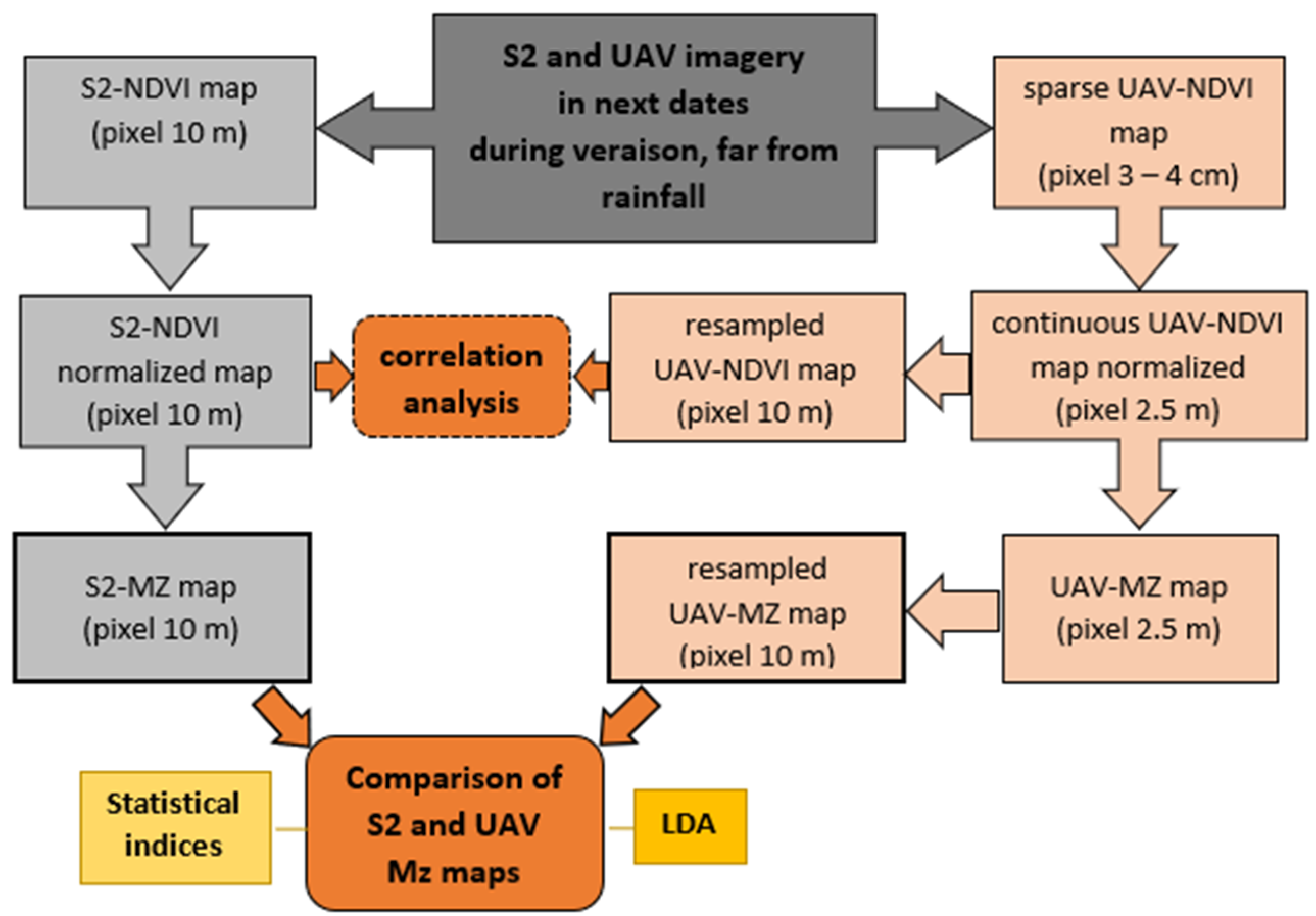
2.6. NDVI Maps from UAV and S2 Data
Comparison of NDVI Maps
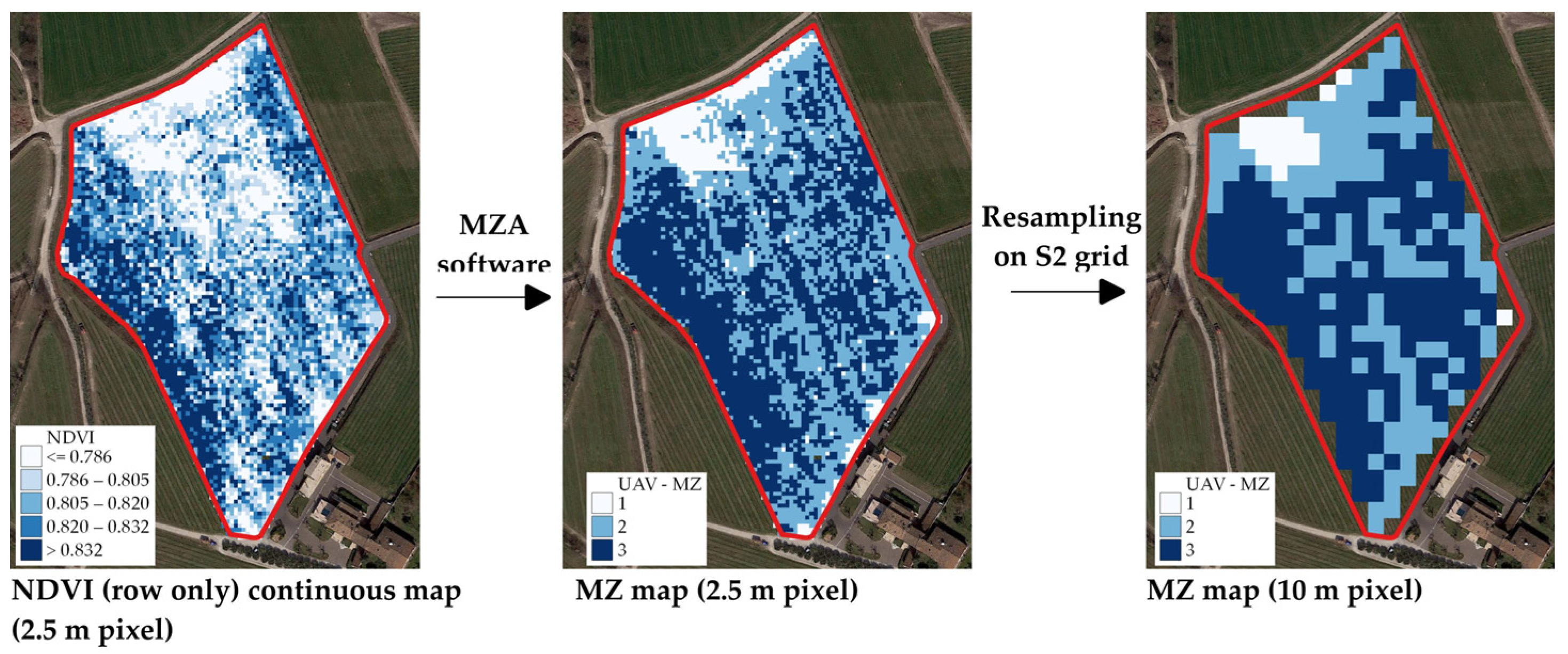
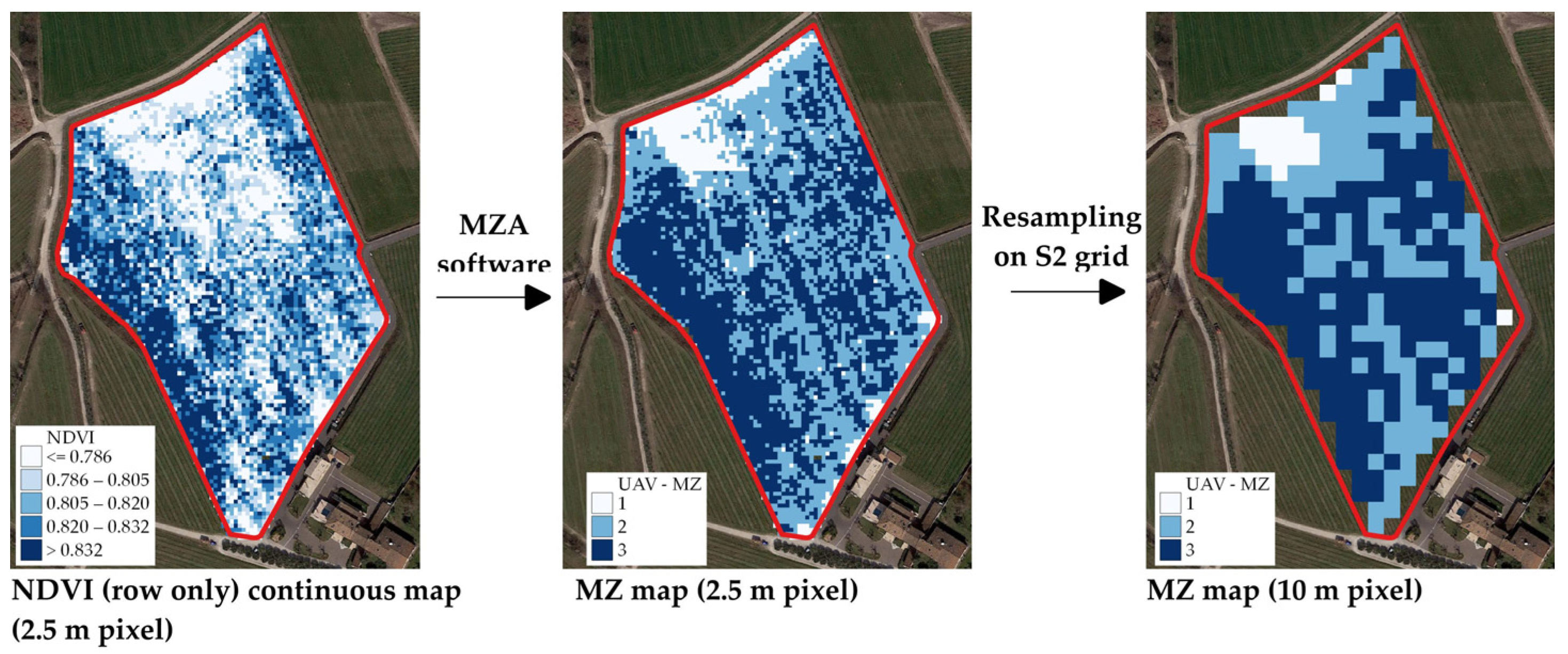
2.7. Delineation of MZs from NDVI Maps
2.7.1. MZ Maps from UAV and S2 Data
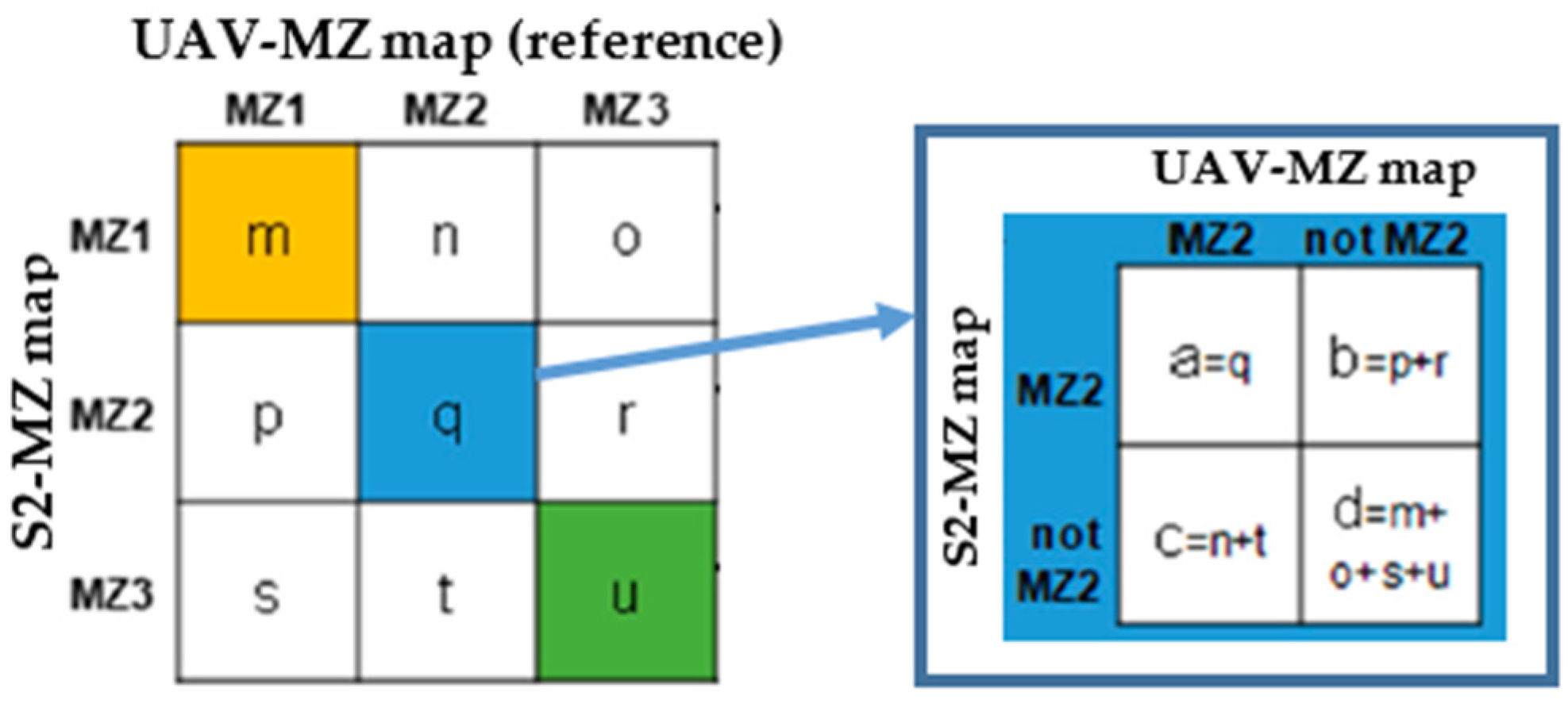
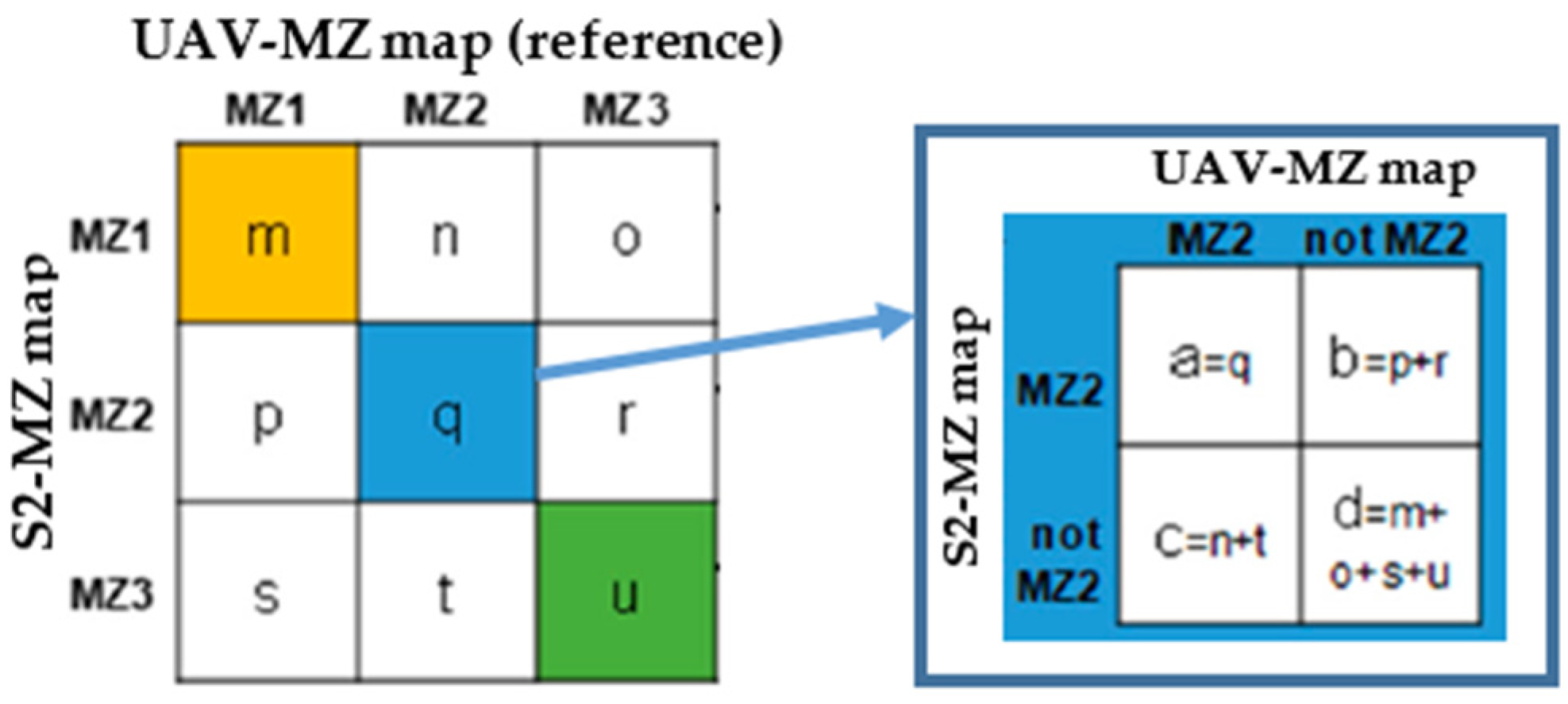
2.7.2. Comparison of MZ Maps
- -
- Proportion of Correct Classification (PCC) (equal to [a + d]/[a + b + c + d]), which is the proportion of correct classifications (i.e., pixels belonging/not belonging to a specific MZ) to the total number of pixels in the reference UAV-MZ map;
- -
- Hit rate (H) (equal to a/[a + c]), which represents the proportion of correct classifications (i.e., pixels belonging to a specific MZ) to the number of pixels belonging to that MZ in the reference UAV-MZ map;
- -
- Bias (BIAS) (equal to [a + b]/[a + c]), which is the ratio between the number of pixels belonging to a specific MZ in the S2-MZ map and those classified as belonging to that MZ in the reference UAV-MZ map, with no consideration of pixel position;
- -
- False Alarm Ratio (FAR) (equal to b/[a + b]), representing the proportion of pixels not correctly classified to the number of those belonging to a specific MZ in the S2-MZ map;
- -
- False detection (F) (equal to b/[b + d]), which is the ratio of pixels not correctly classified to the number of those not belonging to a specific MZ in the reference UAV-MZ map.
2.8. Functional Evaluation of the MZ Maps
3. Results
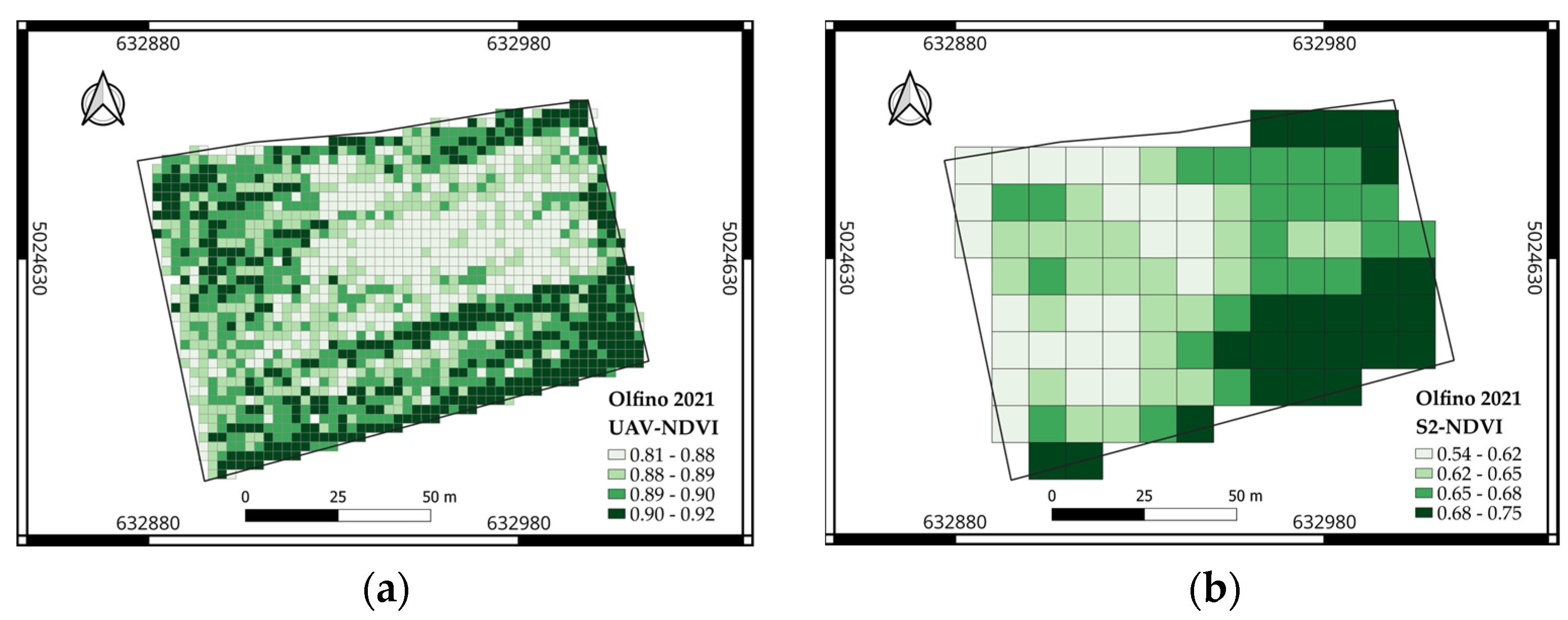
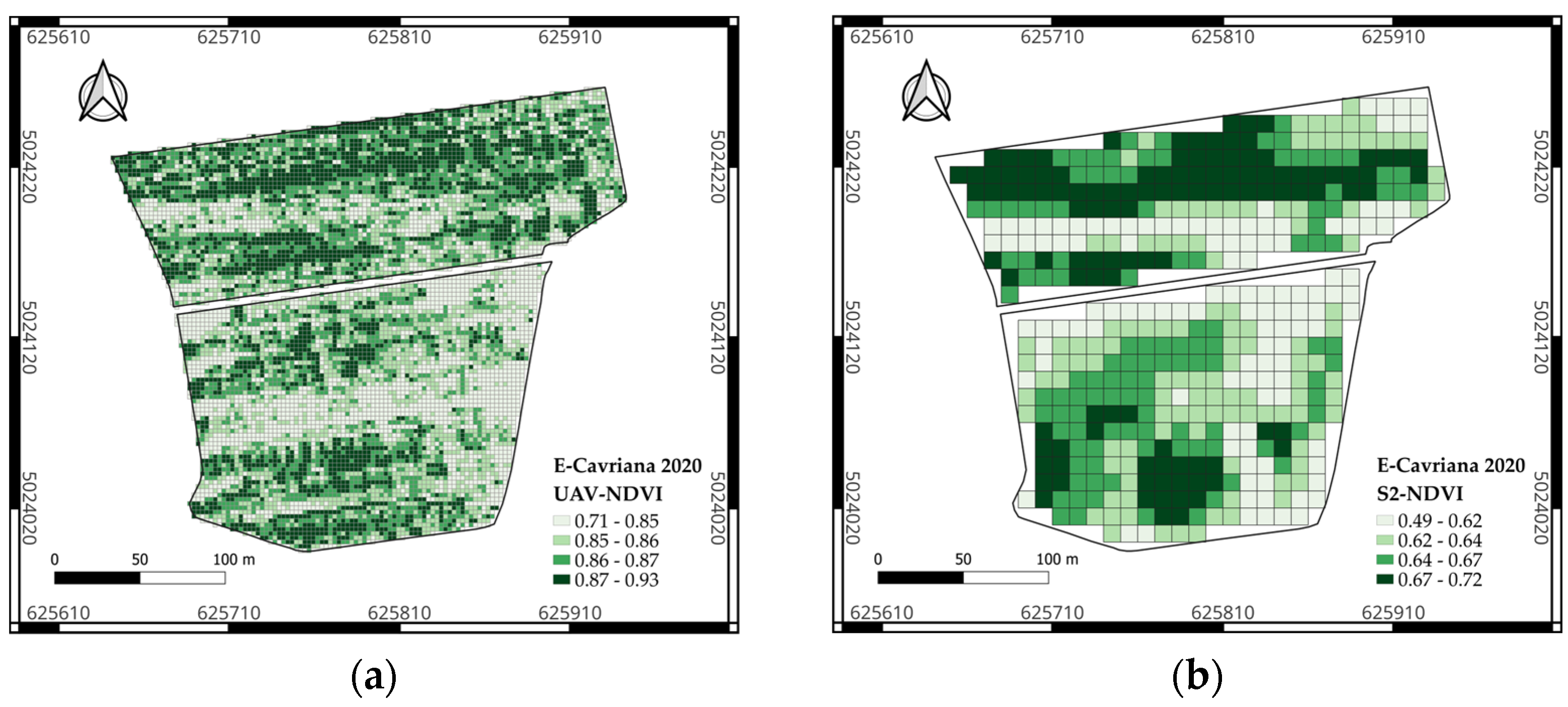
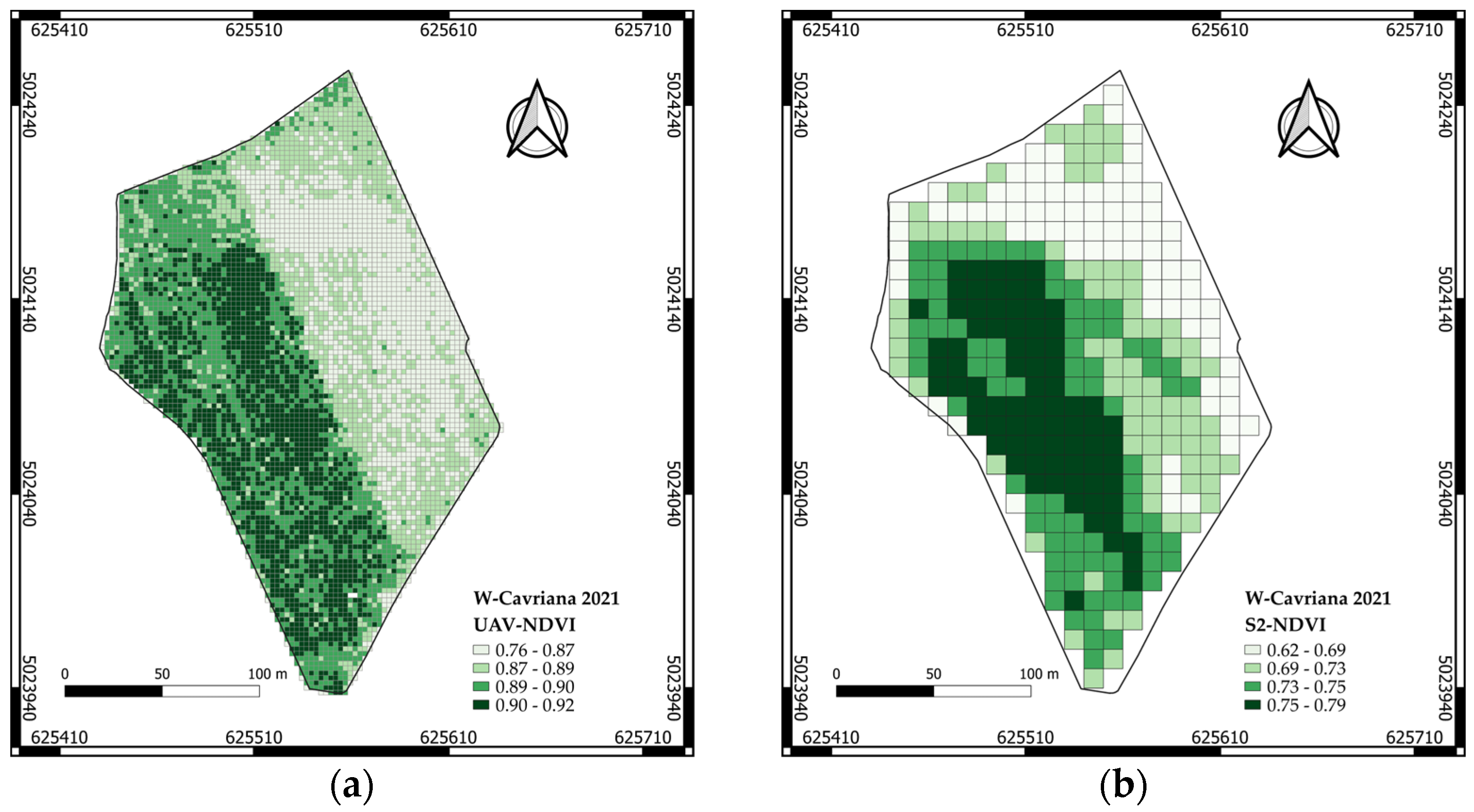
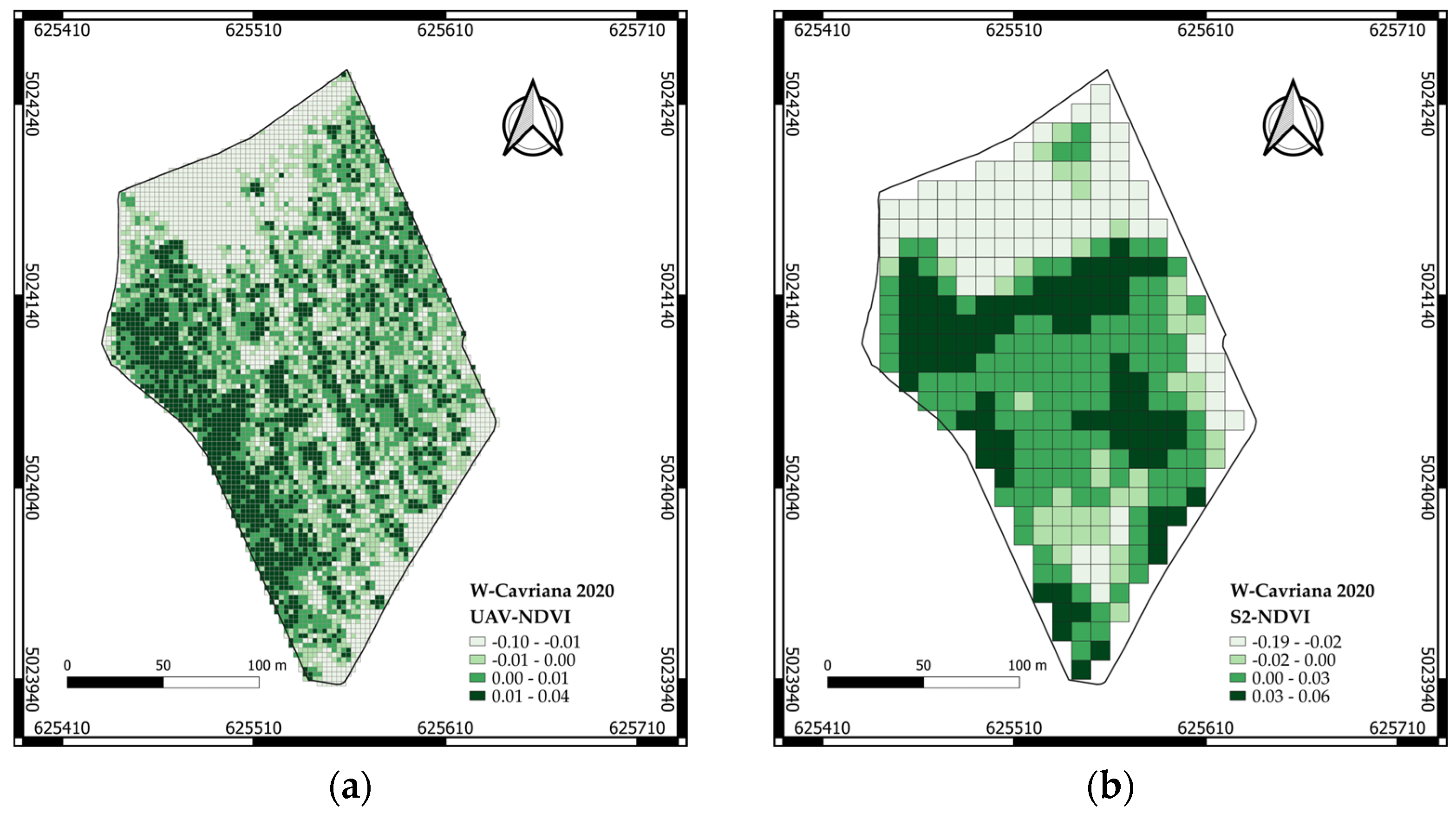
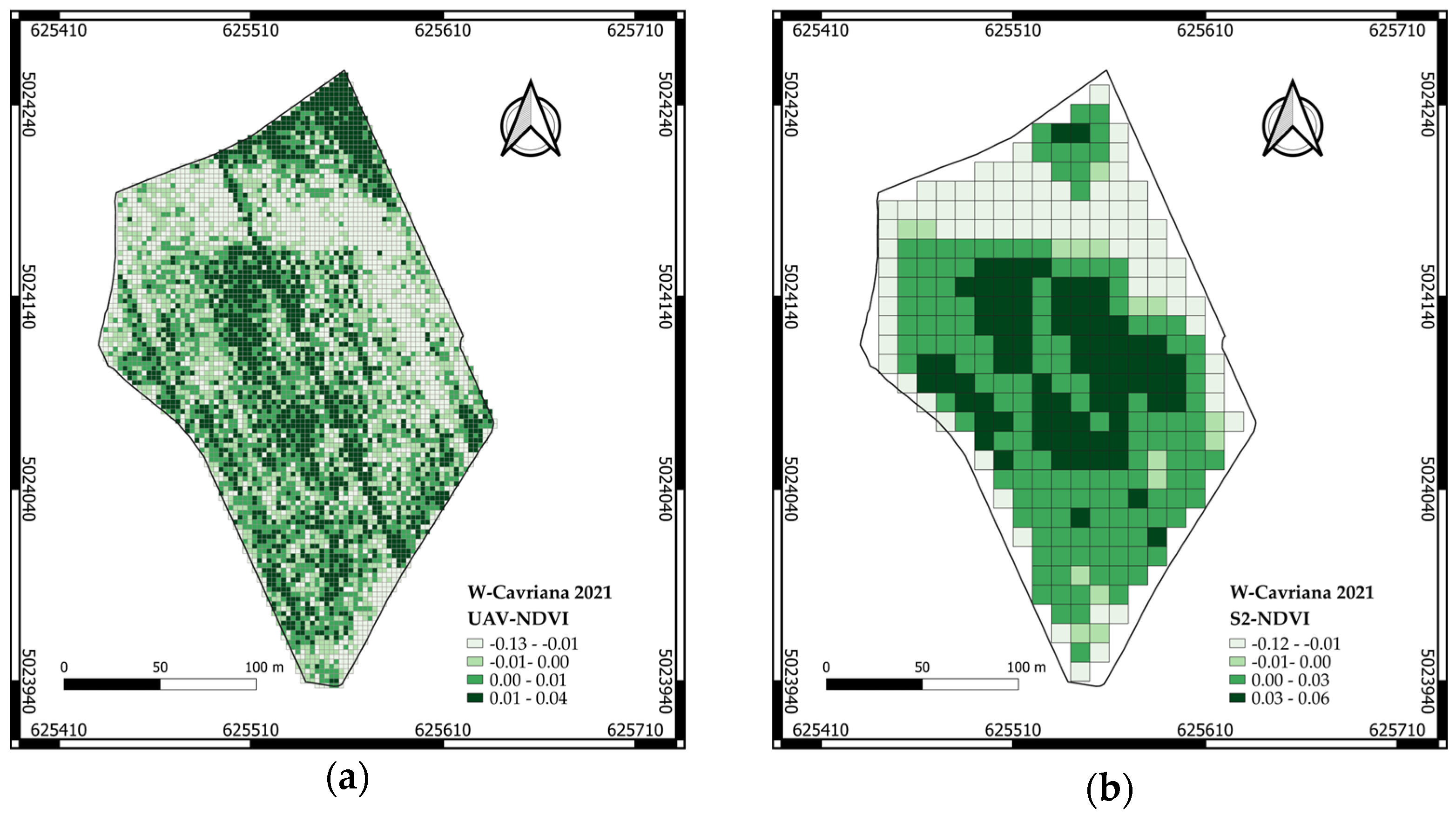
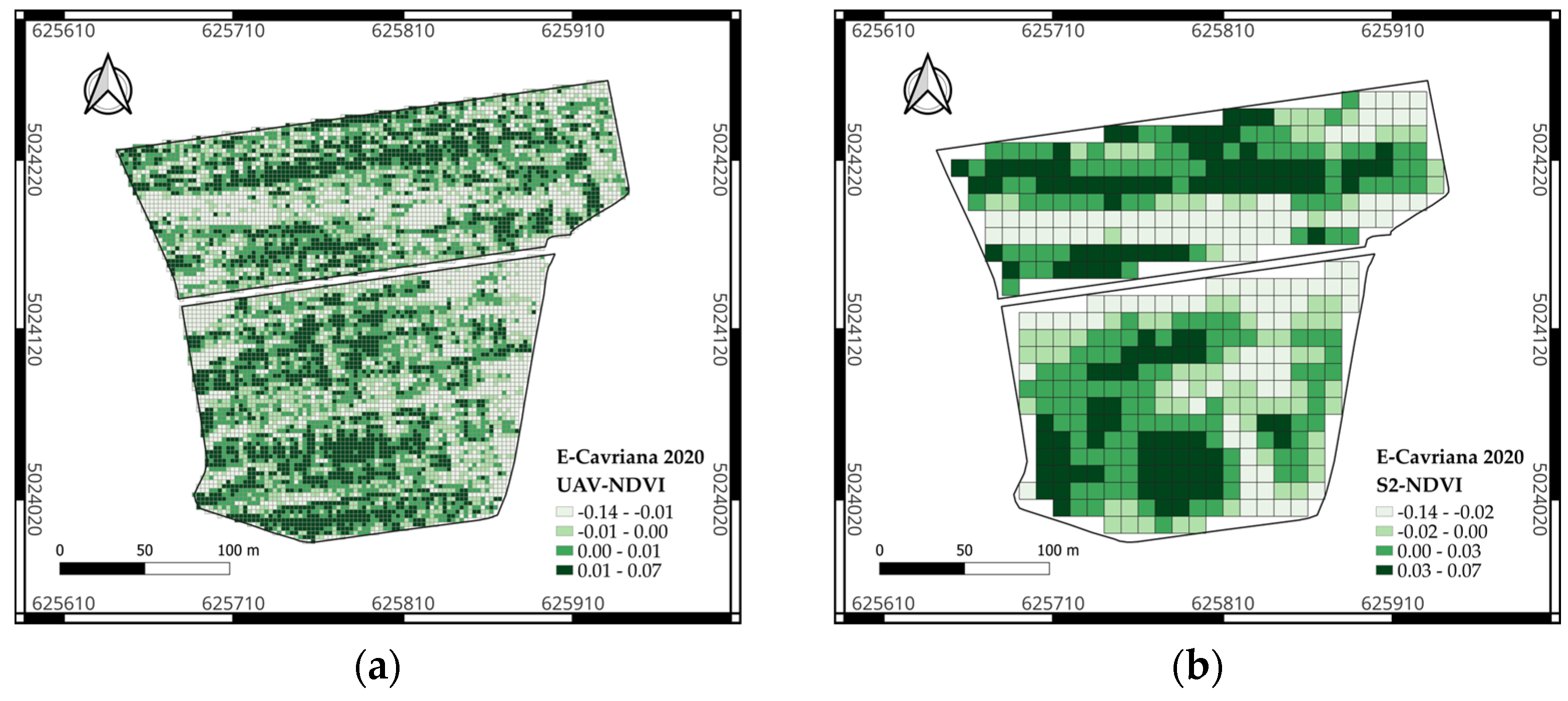
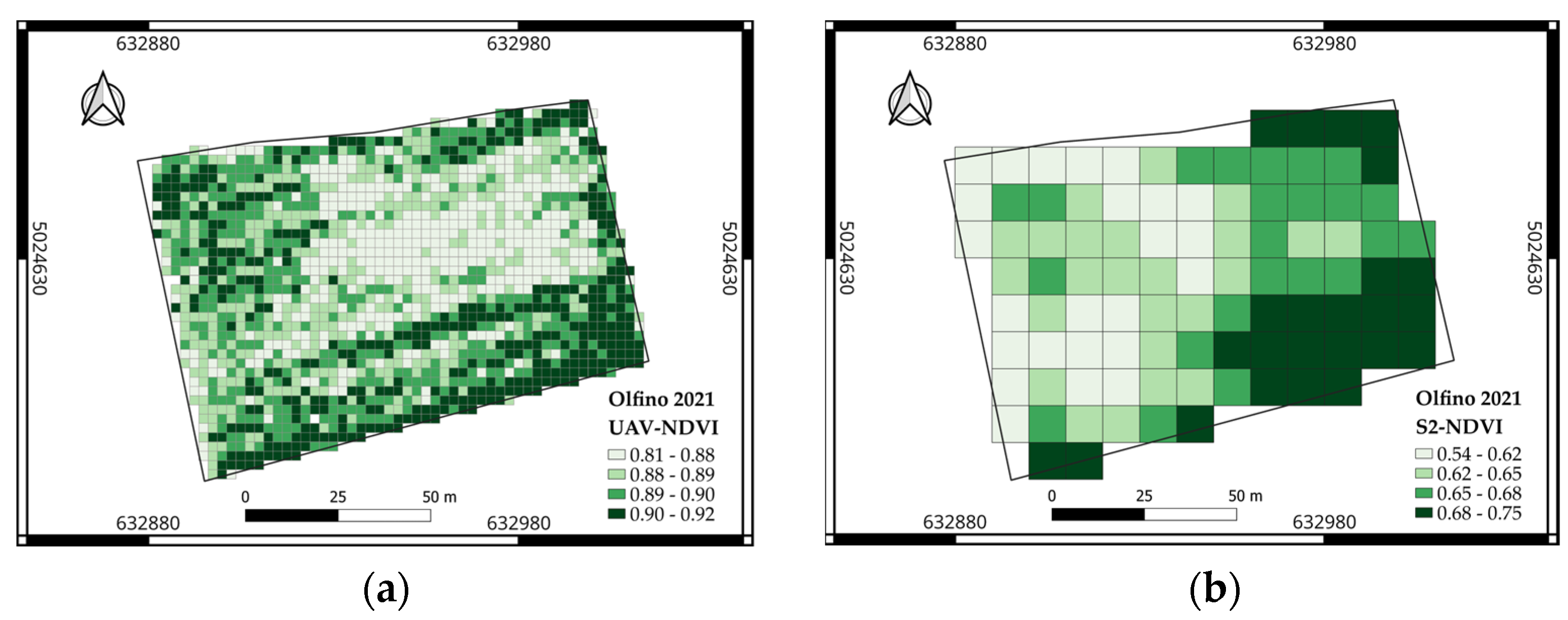
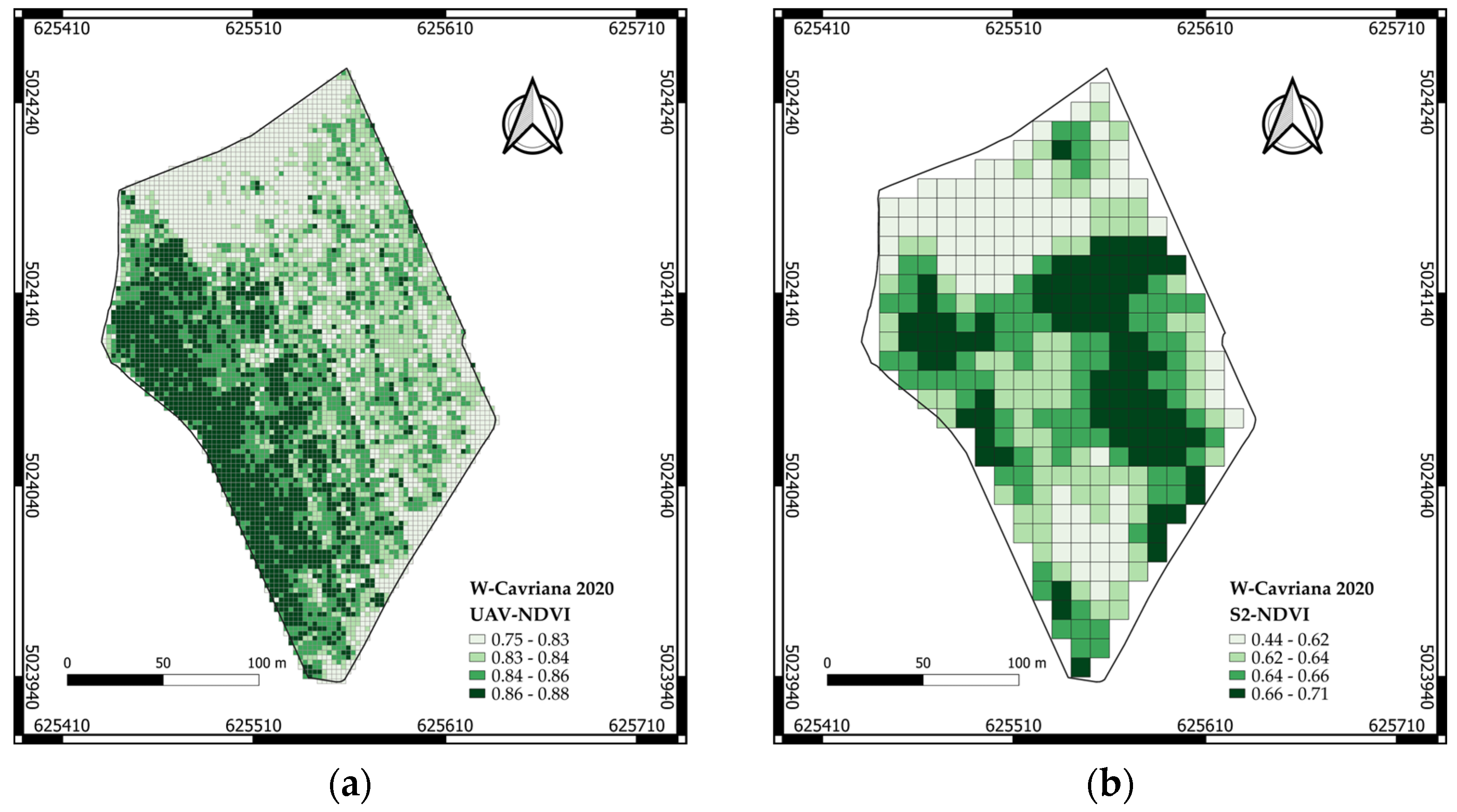
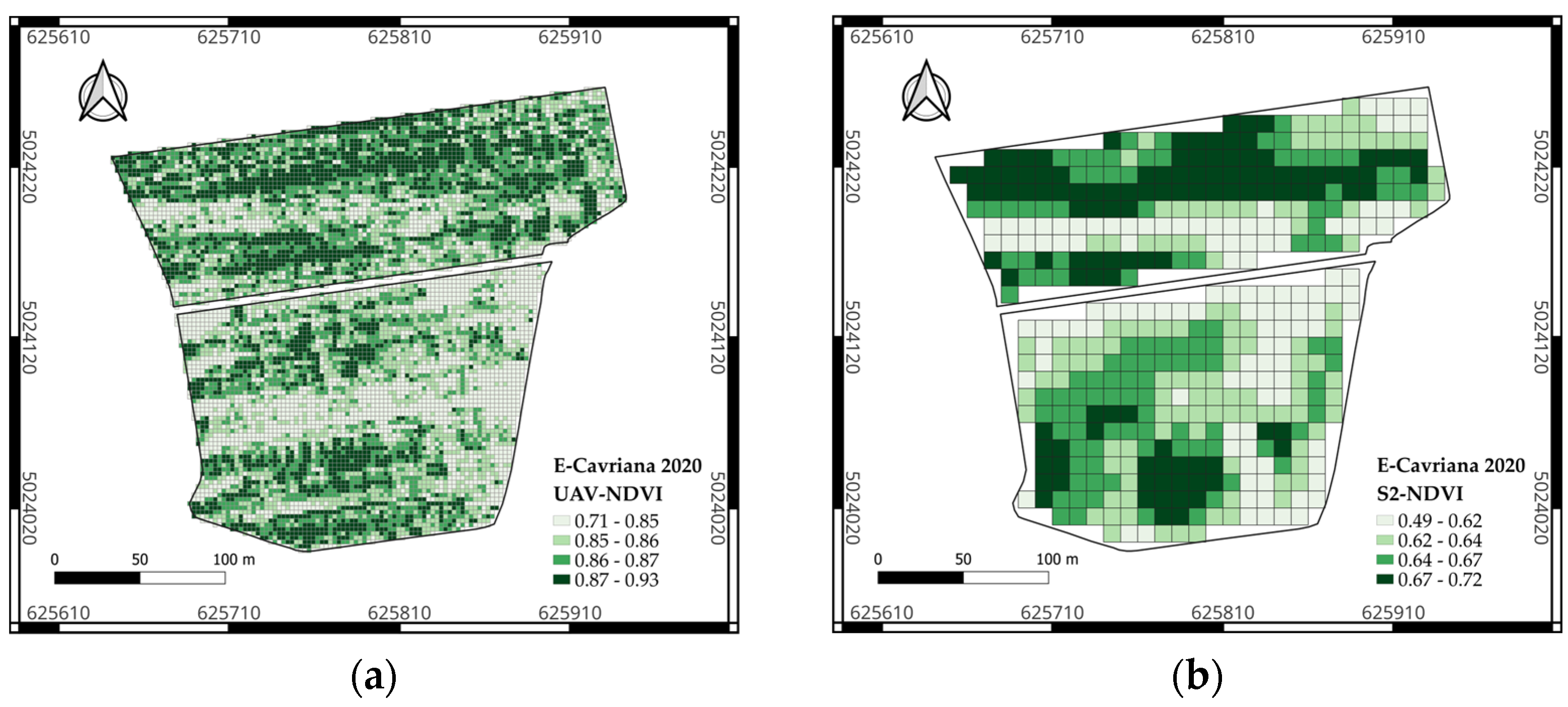
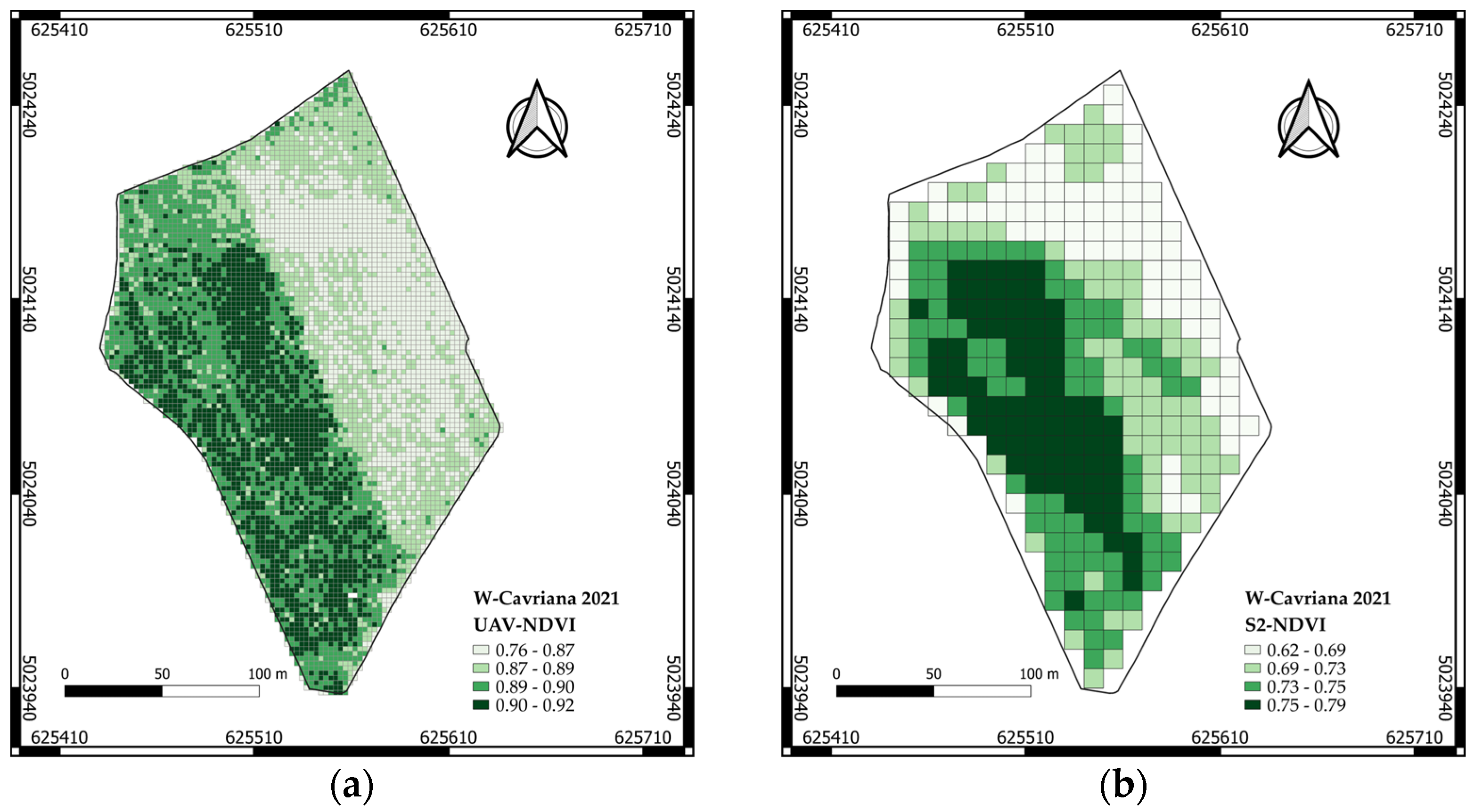
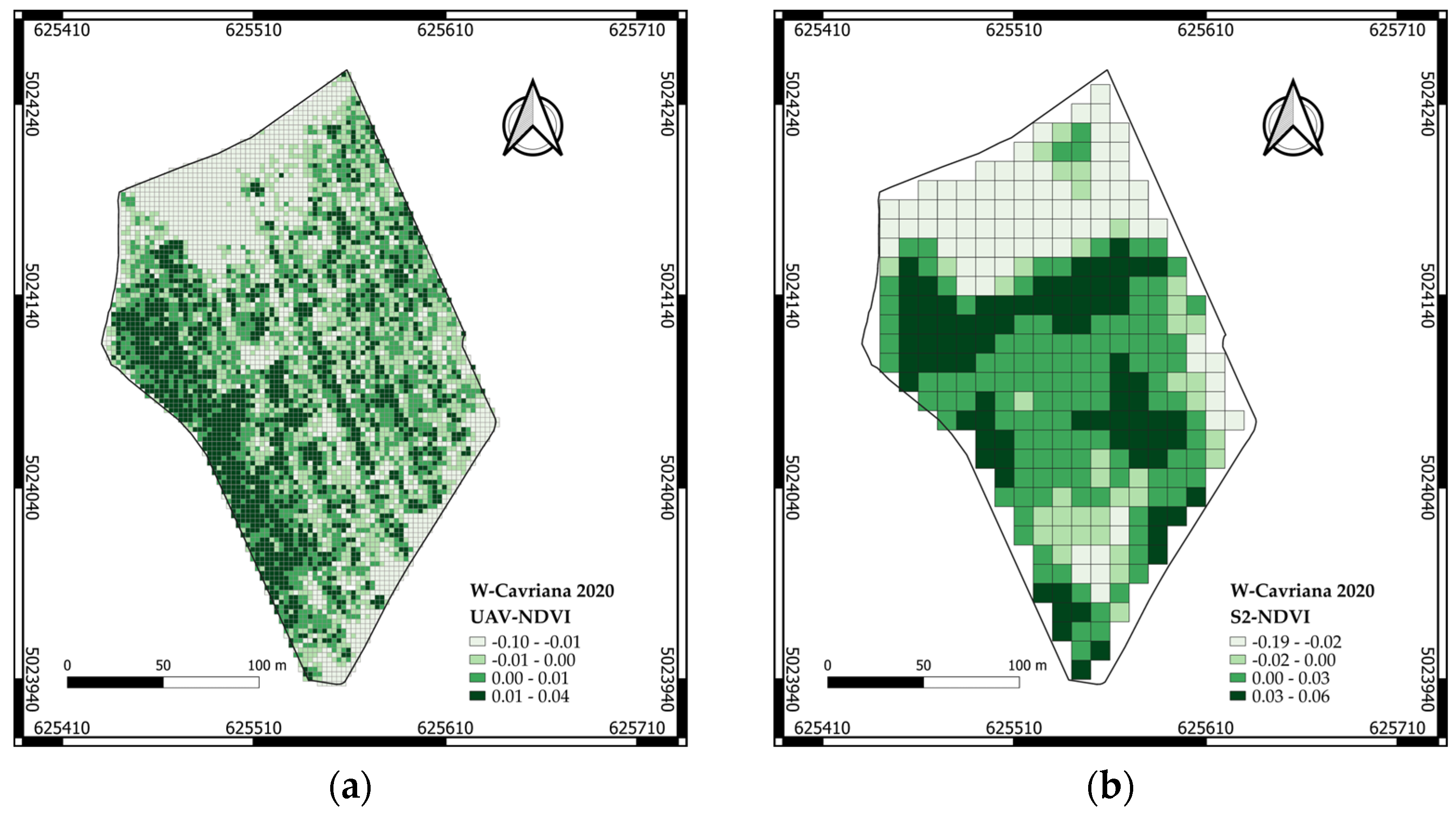
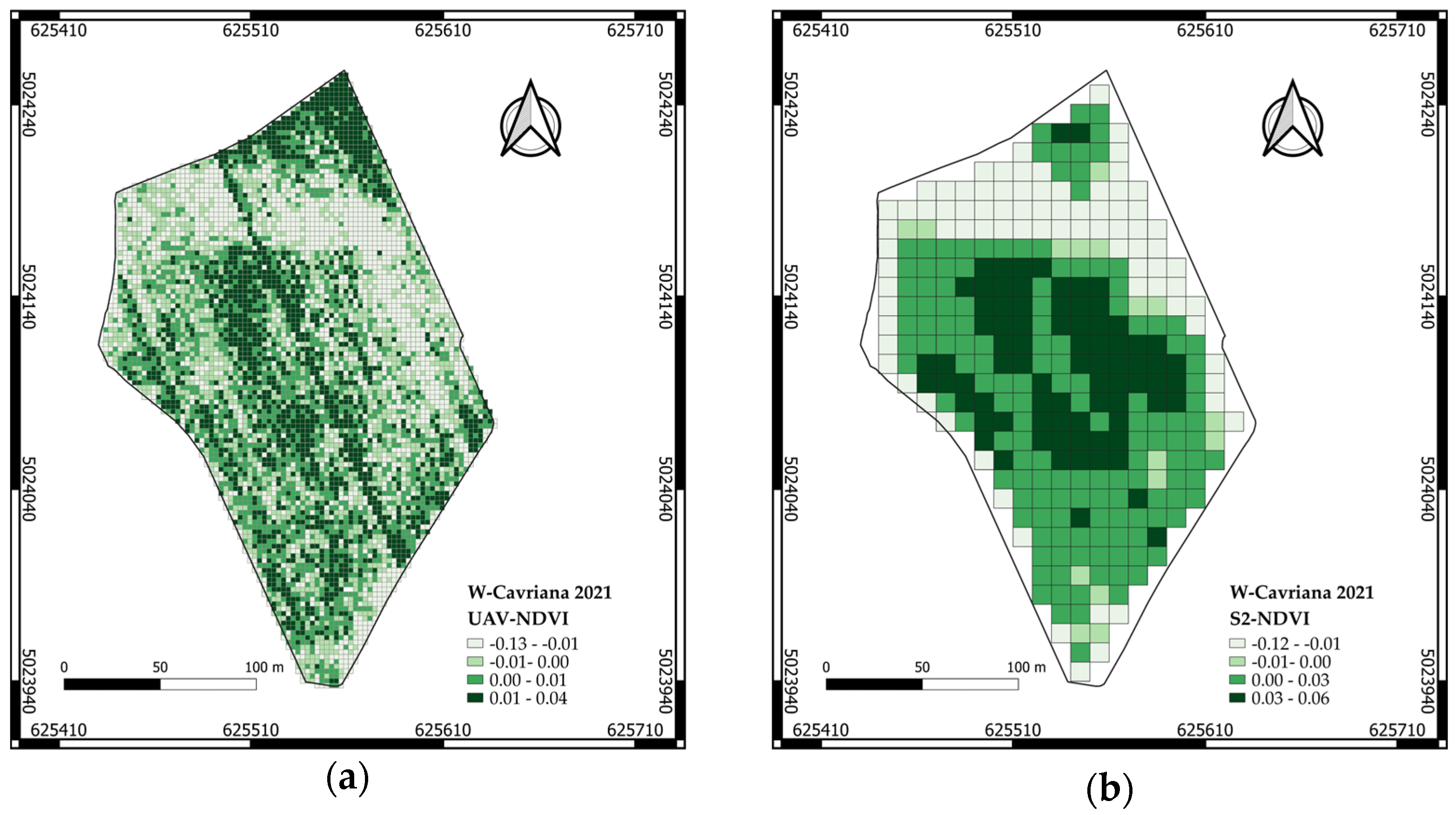
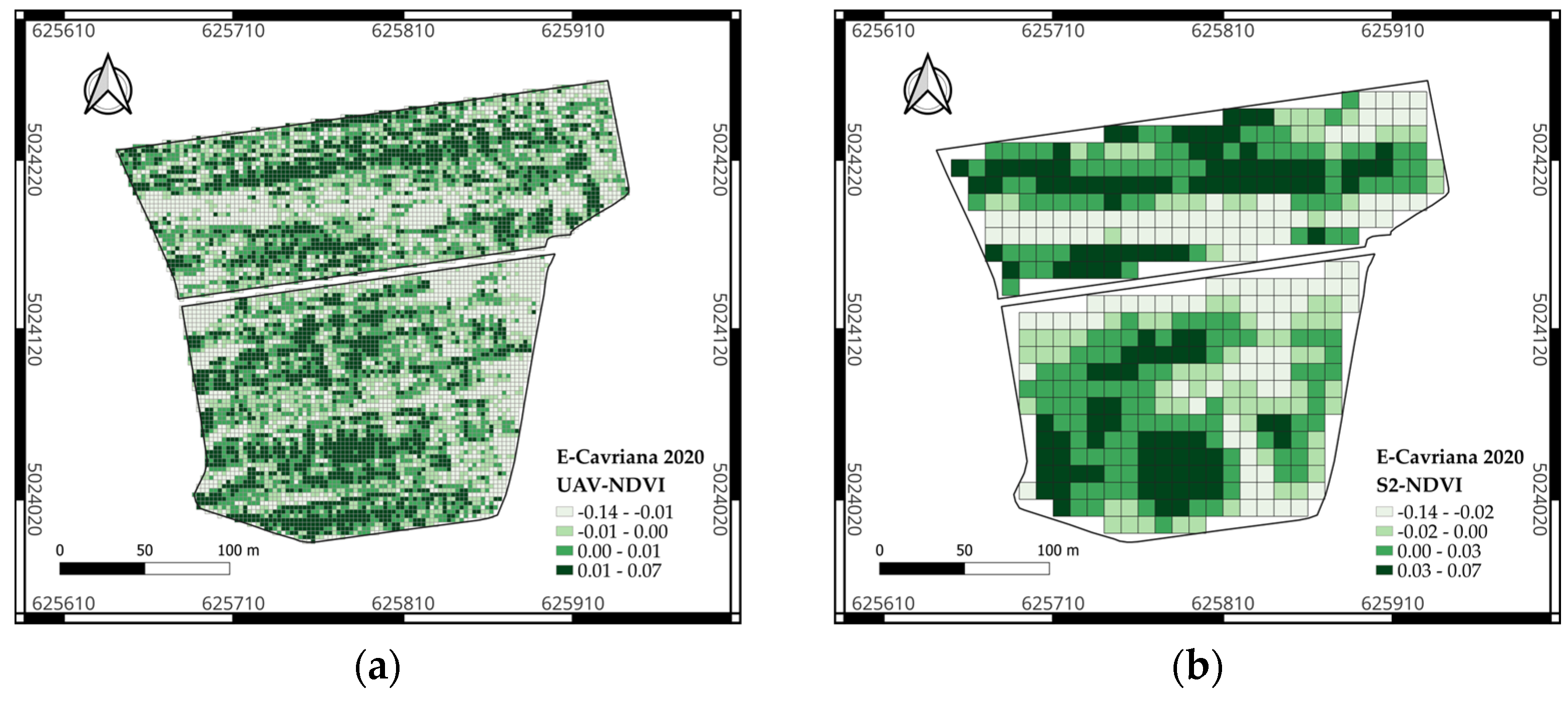
3.1. UAV-NDVI and S2-NDVI Maps
Comparison between UAV-NDVI and S2-NDVI Maps
3.2. Delineation of MZs from NDVI Maps
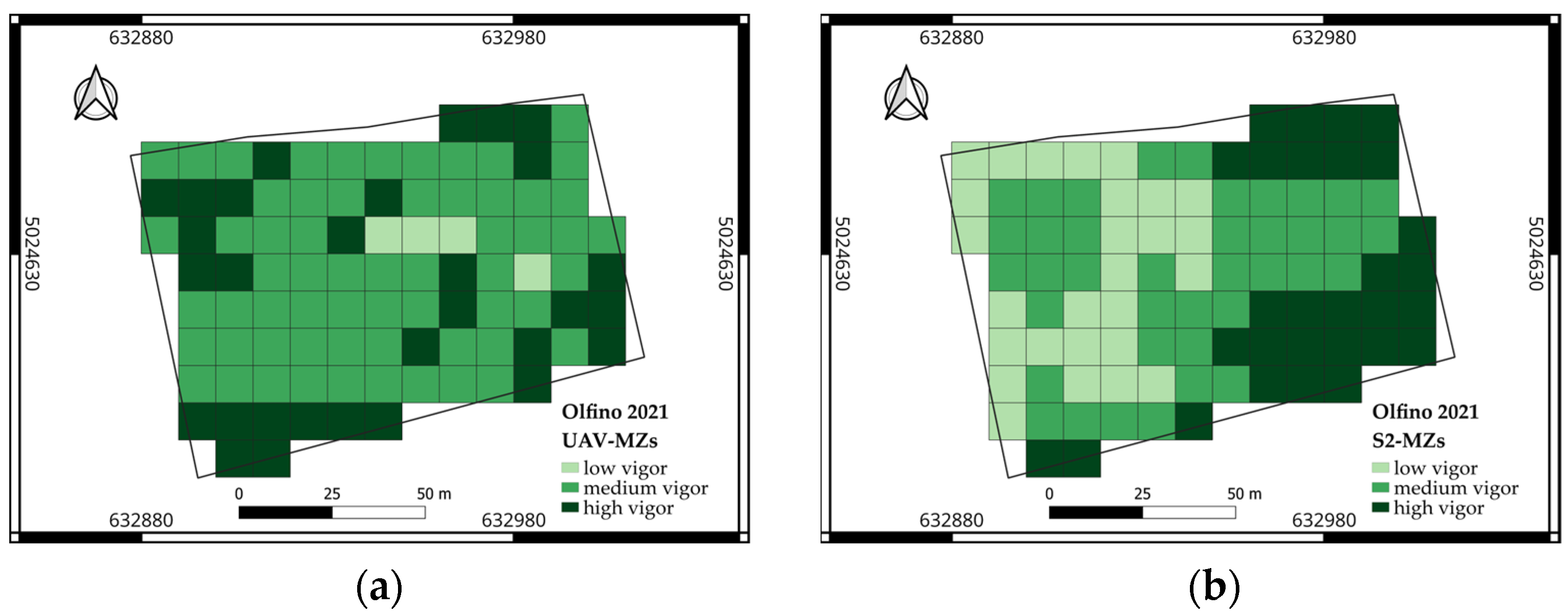
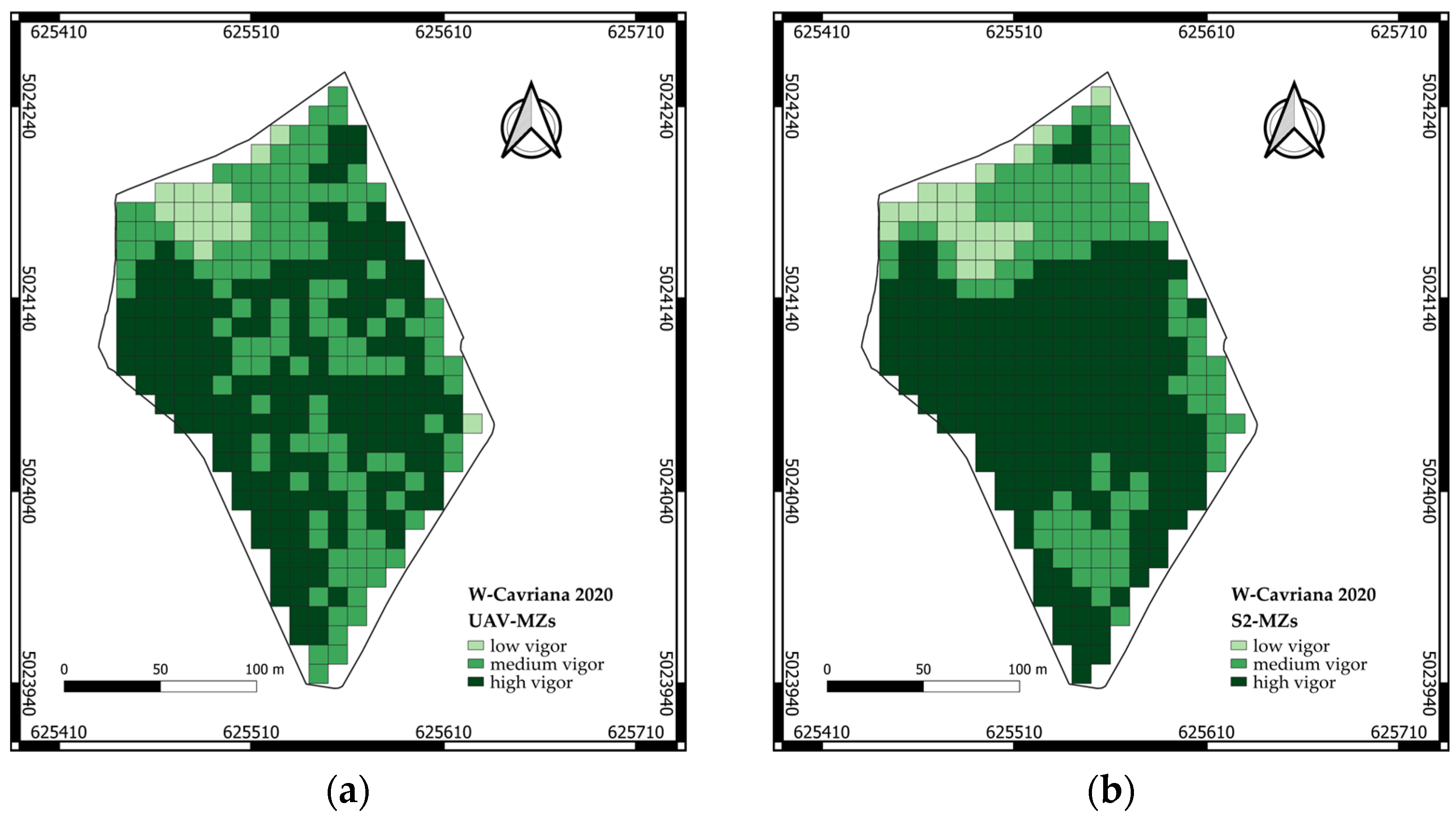
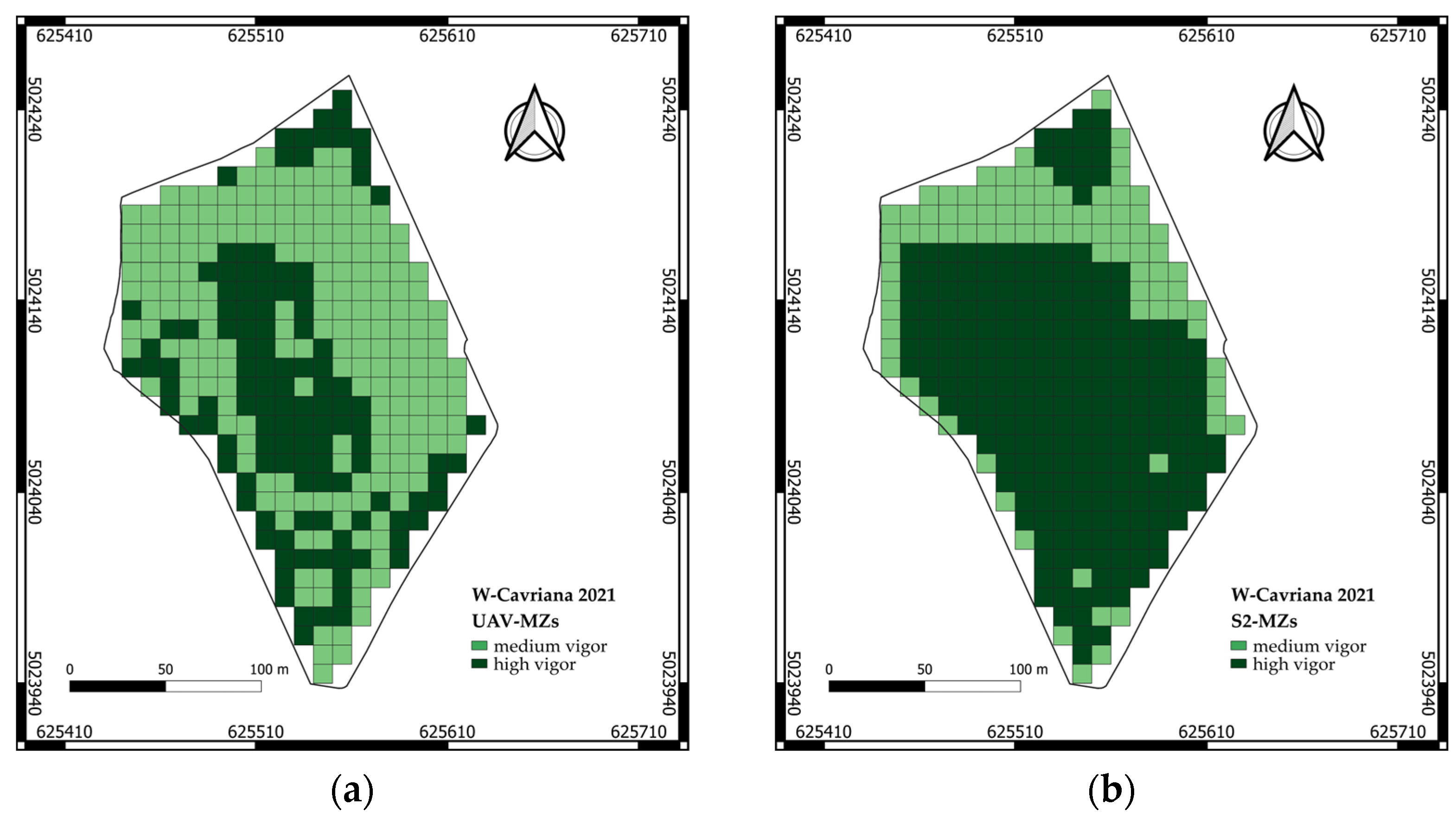
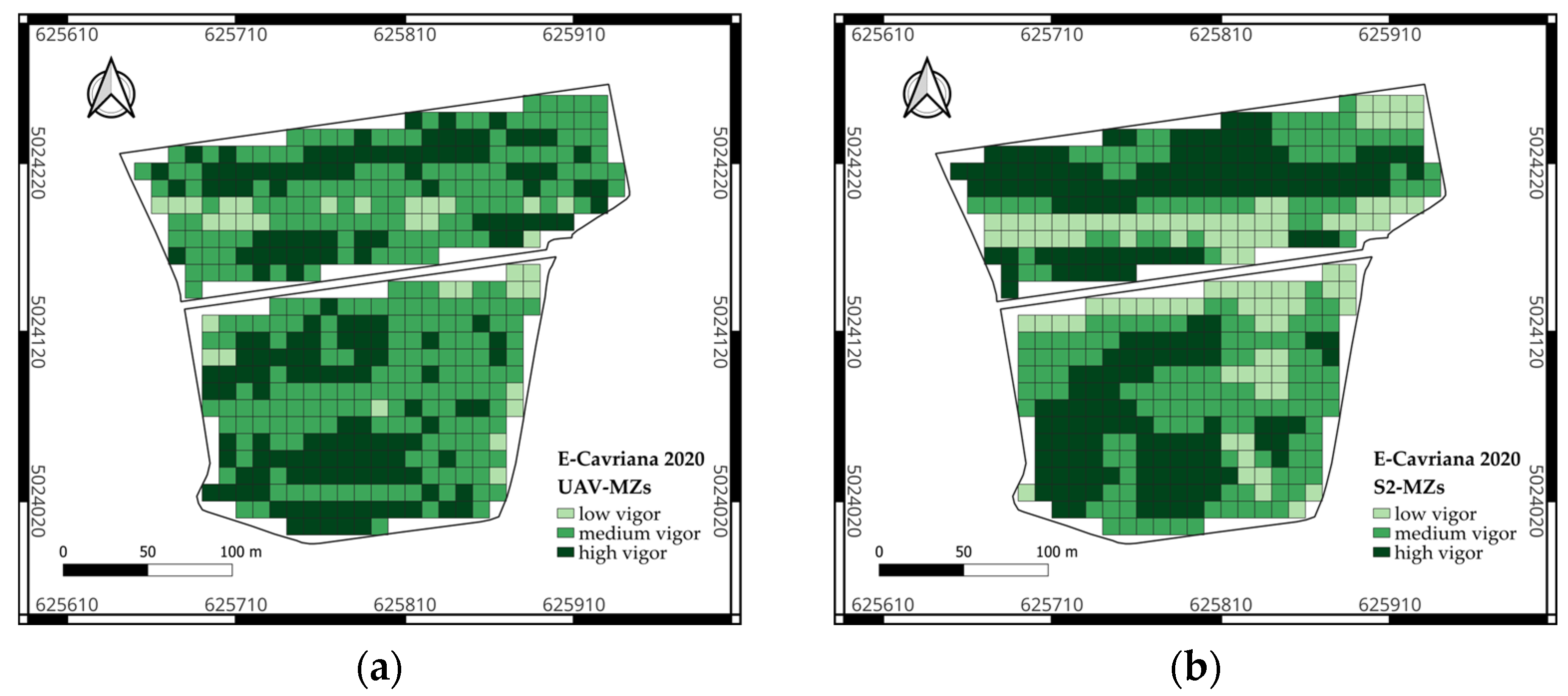
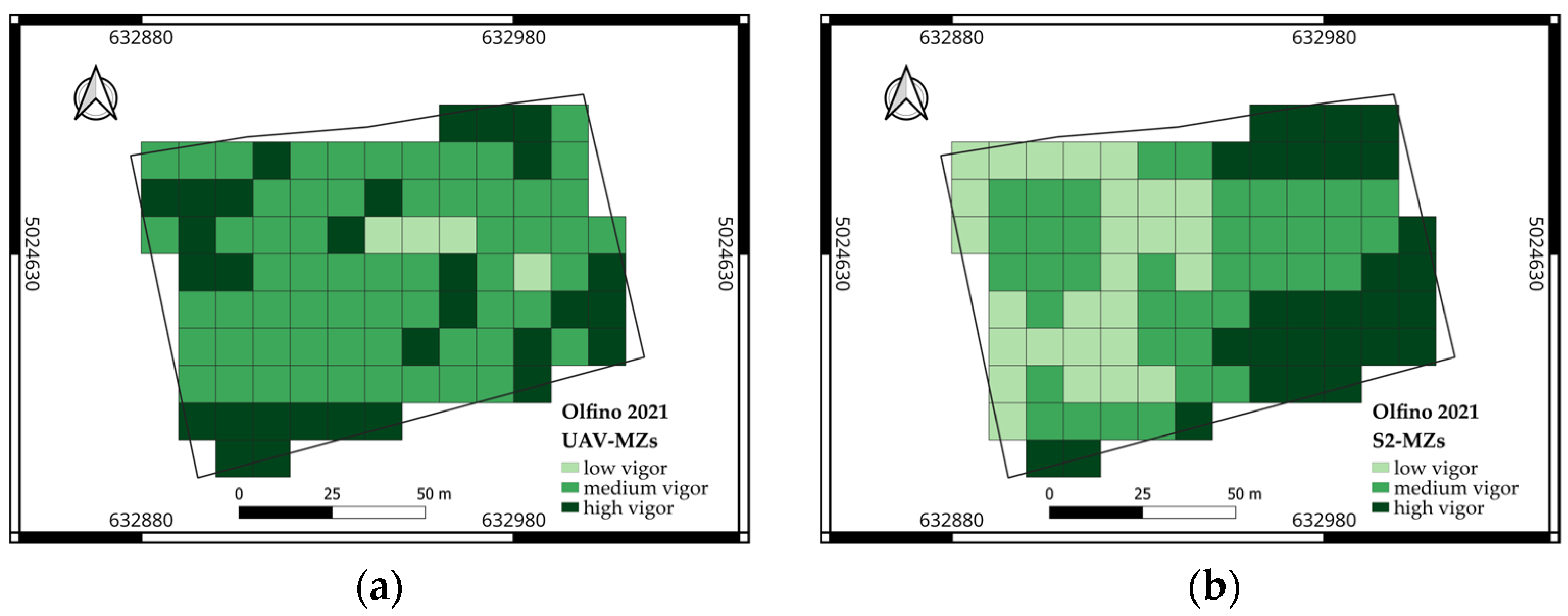
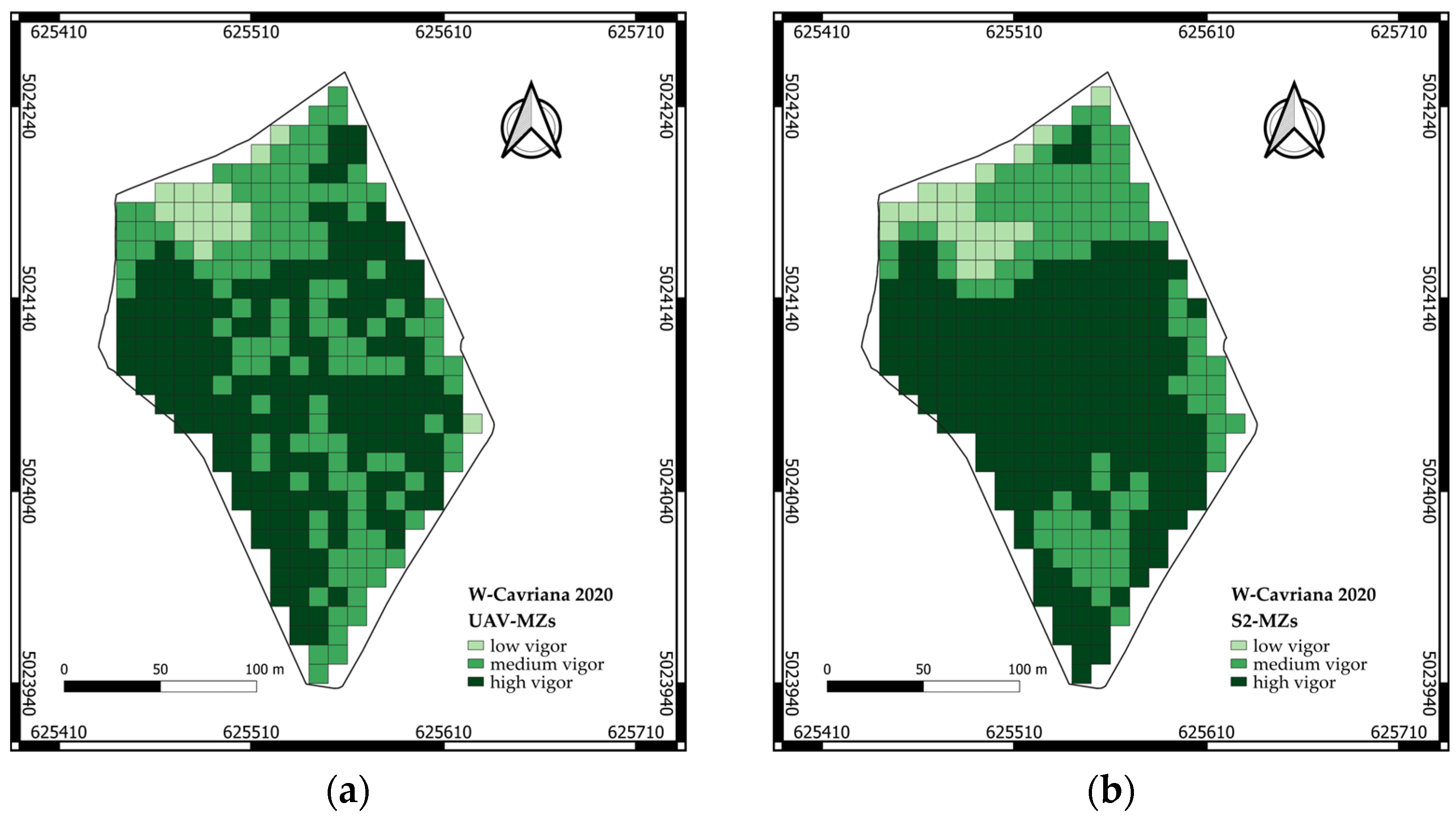
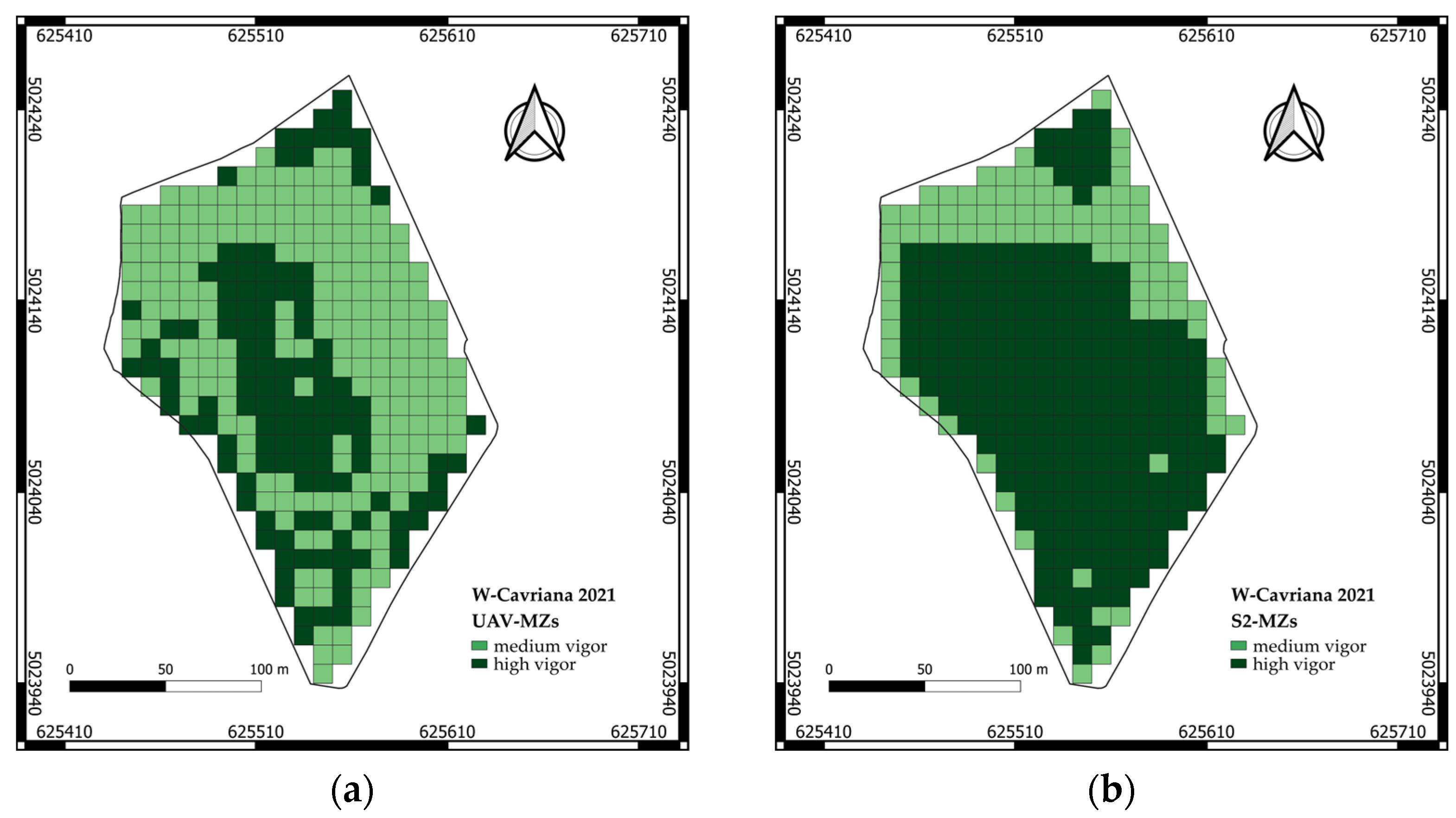
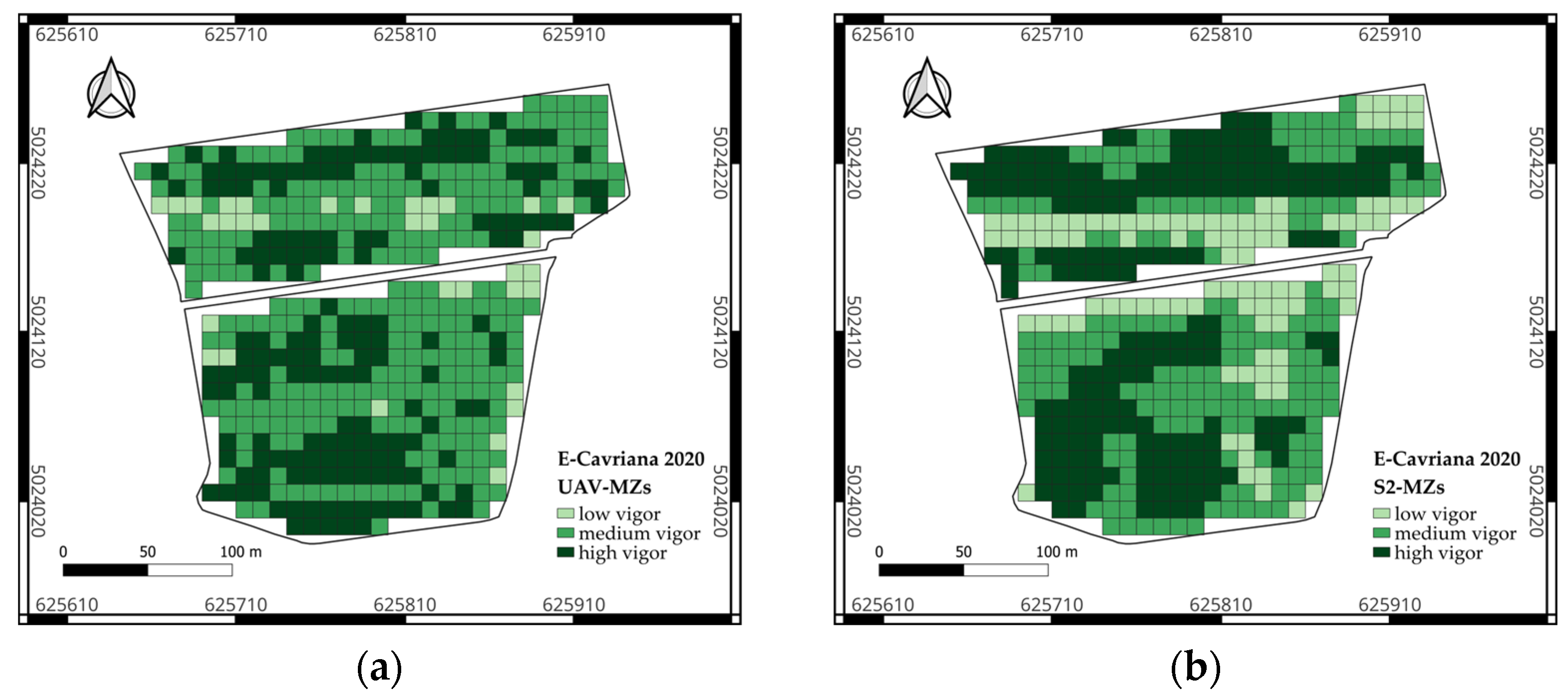
3.2.1. The UAV-MZ and S2-MZ Maps
3.2.2. Comparison between UAV-MZ and S2-MZ Maps
3.3. Functional Evaluation of the MZ Maps
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Weiss, M.; Jacob, F.; Duveiller, G. Remote Sensing for Agricultural Applications: A Meta-Review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Technology in Precision Viticulture: A State of the Art Review. Int. J. Wine Res. 2015, 2015, 69–81. [Google Scholar] [CrossRef]
- Leroux, C.; Tisseyre, B. How to Measure and Report Within-Field Variability: A Review of Common Indicators and Their Sensitivity. Precis. Agric. 2019, 20, 562–590. [Google Scholar] [CrossRef]
- Devaux, N.; Crestey, T.; Leroux, C.; Tisseyre, B. Potential of Sentinel-2 Satellite Images to Monitor Vine Fields Grown at a Territorial Scale. OENO One 2019, 53, 51–58. [Google Scholar] [CrossRef]
- Khaliq, A.; Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Chiaberge, M.; Gay, P. Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment. Remote Sens. 2019, 11, 436. [Google Scholar] [CrossRef]
- Sassu, A.; Gambella, F.; Ghiani, L.; Mercenaro, L.; Caria, M.; Pazzona, A.L. Advances in Unmanned Aerial System Remote Sensing for Precision Viticulture. Sensors 2021, 21, 956. [Google Scholar] [CrossRef] [PubMed]
- Stolarski, O.; Fraga, H.; Sousa, J.J.; Pádua, L. Synergistic Use of Sentinel-2 and UAV Multispectral Data to Improve and Optimize Viticulture Management. Drones 2022, 6, 366. [Google Scholar] [CrossRef]
- Pastonchi, L.; Di Gennaro, S.F.; Toscano, P.; Matese, A. Comparison between Satellite and Ground Data with UAV-Based Information to Analyse Vineyard Spatio-Temporal Variability: This Article Is Published in Cooperation with the XIIIth International Terroir Congress November 17-18 2020, Adelaide, Australia. Guests Editors: Cassandra Collins and Roberta De Bei. OENO One 2020, 54, 919–934. [Google Scholar] [CrossRef]
- Sozzi, M.; Kayad, A.; Marinello, F.; Taylor, J.; Tisseyre, B. Comparing Vineyard Imagery Acquired from Sentinel-2 and Unmanned Aerial Vehicle (UAV) Platform. OENO One 2020, 54, 189–197. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.; Genesio, L.; Vaccari, F.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Ronchetti, G.; Mayer, A.; Facchi, A.; Ortuani, B.; Sona, G. Crop Row Detection through UAV Surveys to Optimize On-Farm Irrigation Management. Remote Sens. 2020, 12, 1967. [Google Scholar] [CrossRef]
- Bramley, R.G.V.; Ouzman, J.; Thornton, C. Selective Harvesting Is a Feasible and Profitable Strategy Even When Grape and Wine Production Is Geared towards Large Fermentation Volumes: Selective Harvesting. Aust. J. Grape Wine Res. 2011, 17, 298–305. [Google Scholar] [CrossRef]
- Priori, S.; Martini, E.; Andrenelli, M.C.; Magini, S.; Agnelli, A.E.; Bucelli, P.; Biagi, M.; Pellegrini, S.; Costantini, E.A.C. Improving Wine Quality through Harvest Zoning and Combined Use of Remote and Soil Proximal Sensing. Soil Sci. Soc. Am. J. 2013, 77, 1338–1348. [Google Scholar] [CrossRef]
- Best, S.; Leon, L.; Quintana, R. Development of a Differential Grape Harvesting Methodology. Chem. Eng. Trans. 2015, 44, 295–300. [Google Scholar] [CrossRef]
- Arnó, J.; Rosell, J.R.; Blanco, R.; Ramos, M.C.; Martínez-Casasnovas, J.A. Spatial Variability in Grape Yield and Quality Influenced by Soil and Crop Nutrition Characteristics. Precis. Agric. 2012, 13, 393–410. [Google Scholar] [CrossRef]
- Santesteban, L.G. Precision Viticulture and Advanced Analytics. A Short Review. Food Chem. 2019, 279, 58–62. [Google Scholar] [CrossRef] [PubMed]
- Di Gennaro, S.; Dainelli, R.; Palliotti, A.; Toscano, P.; Matese, A. Sentinel-2 Validation for Spatial Variability Assessment in Overhead Trellis System Viticulture Versus UAV and Agronomic Data. Remote Sens. 2019, 11, 2573. [Google Scholar] [CrossRef]
- Ortuani, B.; Facchi, A.; Mayer, A.; Bianchi, D.; Bianchi, A.; Brancadoro, L. Assessing the Effectiveness of Variable-Rate Drip Irrigation on Water Use Efficiency in a Vineyard in Northern Italy. Water 2019, 11, 1964. [Google Scholar] [CrossRef]
- Bianchi, D.; Martino, B.; Lucio, B.; Sara, C.; Daniele, F.; Daniele, M.; Davide, M.; Bianca, O.; Carola, P.; Claudio, G. Effect of Multifunctional Irrigation on Grape Quality: A Case Study in Northern Italy. Irrig. Sci. 2023, 41, 521–542. [Google Scholar] [CrossRef]
- Ranghetti, L.; Boschetti, M.; Nutini, F.; Busetto, L. “Sen2r”: An R Toolbox for Automatically Downloading and Preprocessing Sentinel-2 Satellite Data. Comput. Geosci. 2020, 139, 104473. [Google Scholar] [CrossRef]
- R Core Team R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2023.
- Fridgen, J.J.; Kitchen, N.R.; Sudduth, K.A.; Drummond, S.T.; Wiebold, W.J.; Fraisse, C.W. Management Zone Analyst (MZA): Software for Subfield Management Zone Delineation. Agron. J. 2004, 96, 100–108. [Google Scholar] [CrossRef]
- Corti, M.; Marino Gallina, P.; Cavalli, D.; Ortuani, B.; Cabassi, G.; Cola, G.; Vigoni, A.; Degano, L.; Bregaglio, S. Evaluation of In-Season Management Zones from High-Resolution Soil and Plant Sensors. Agronomy 2020, 10, 1124. [Google Scholar] [CrossRef]
- Wickham, H. Ggplot2: Elegant Graphics for Data Analysis; Springer: New York, NY, USA, 2016; ISBN 978-3-319-24277-4. [Google Scholar]
- Di Gennaro, S.F.; Toscano, P.; Gatti, M.; Poni, S.; Berton, A.; Matese, A. Spectral Comparison of UAV-Based Hyper and Multispectral Cameras for Precision Viticulture. Remote Sens. 2022, 14, 449. [Google Scholar] [CrossRef]
- Gatti, M.; Schippa, M.; Garavani, A.; Squeri, C.; Frioni, T.; Dosso, P.; Poni, S. High Potential of Variable Rate Fertilization Combined with a Controlled Released Nitrogen Form at Affecting Cv. Barbera Vines Behavior. Eur. J. Agron. 2020, 112, 125949. [Google Scholar] [CrossRef]
- Gatti, M.; Garavani, A.; Vercesi, A.; Poni, S. Ground-Truthing of Remotely Sensed within-Field Variability in a Cv. Barbera Plot for Improving Vineyard Management: Vigour Mapping and Vineyard Management. Aust. J. Grape Wine Res. 2017, 23, 399–408. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Beyond the Traditional NDVI Index as a Key Factor to Mainstream the Use of UAV in Precision Viticulture. Sci. Rep. 2021, 11, 2721. [Google Scholar] [CrossRef] [PubMed]
- Squeri, C.; Diti, I.; Rodschinka, I.P.; Poni, S.; Dosso, P.; Scotti, C.; Gatti, M. The High-Yielding Lambrusco (Vitis vinifera L.) Grapevine District Can Benefit from Precision Viticulture. Am. J. Enol. Vitic. 2021, 72, 267–278. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Dataset | UAV | Flying Height (m AGL) | Ground Control Points |
|---|---|---|---|---|
| 20 July 2020 | W-Cavriana E-Cavriana | Octocopter, self-assembled | 60 m | 10 |
| 23 July 2021 | W-Cavriana Olfino | DJI Matrice 300 | 60 m 45 m | 10 8 |
| Sensor | Band | Wavelength (nm) |
|---|---|---|
| Blue | 475 | |
| Micasense | Green | 560 |
| RedEdge | Red | 668 |
| Red Edge (RE) | 717 | |
| Near Infra-Red (NIR) | 840 |
| Correlation Coefficient | W-Cavriana, 2020 | E-Cavriana, 2020 | W-Cavriana, 2021 | Olfino, 2021 |
|---|---|---|---|---|
| UAV-S2 | 0.68 | 0.51 | 0.86 | 0.74 |
| inter-row UAV-S2 | 0.71 | 0.48 | 0.85 | 0.74 |
| vine UAV-S2 | 0.43 | 0.39 | 0.75 | 0.50 |
| vine UAV-S2* | 0.70 | 0.40 | 0.55 | - |
| Optimal No. of MZs | W-Cavriana, 2020 | E-Cavriana, 2020 | W-Cavriana, 2021 | Olfino, 2021 |
|---|---|---|---|---|
| UAV-NDVI map | 2 | 3 | 3 | 4 |
| S2-NDVI map | 4 | 3 | 2 | 4 |
| Vigor Class | Low (MZ-1) | Medium (MZ-2) | High (MZ-3) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Index | A | B | C | D | A | B | C | D | A | B | C | D |
| PCC | 0.96 | 0.79 | - | 0.70 | 0.67 | 0.46 | 0.56 | 0.50 | 0.71 | 0.62 | 0.56 | 0.70 |
| H | 0.77 | 0.46 | - | 0.25 | 0.45 | 0.36 | 0.37 | 0.43 | 0.81 | 0.55 | 0.87 | 0.50 |
| BIAS | 1.35 | 2.91 | - | 6.75 | 0.77 | 0.66 | 0.45 | 0.64 | 1.13 | 1.16 | 1.90 | 0.97 |
| FAR | 0.44 | 0.84 | - | 0.96 | 0.41 | 0.46 | 0.18 | 0.33 | 0.29 | 0.53 | 0.54 | 0.48 |
| F | 0.03 | 0.19 | - | 0.29 | 0.20 | 0.40 | 0.13 | 0.38 | 0.41 | 0.34 | 0.63 | 0.22 |
| Global Index | A | B | C | D | ||||||||
| PCC | 0.67 | 0.43 | 0.56 | 0.44 | ||||||||
| MZs | Field | Year | Variety | DF | PW | PP | MCW | RI | TSSs | TA | pH |
|---|---|---|---|---|---|---|---|---|---|---|---|
| UAV | E-C | 2020 | CH | F1 | −0.28 | −0.66 | 0.38 | −0.39 | 0.69 | 0.77 | 1.10 |
| E-C | 2020 | CS | F1 | 0.63 | −0.34 | 0.84 | 1.00 | 0.11 | 1.27 | 0.53 | |
| F2 | 2.75 | −2.09 | 0.44 | 1.85 | −0.28 | −0.69 | −0.71 | ||||
| E-C | 2020 | TR | F1 | 0.29 | 1.02 | −0.55 | 0.38 | 1.08 | −0.65 | −0.48 | |
| F2 | 2.23 | −2.53 | −0.07 | 2.68 | 0.46 | −0.03 | 0.05 | ||||
| W-C | 2020 | CH | F1 | 2.12 | −2.46 | 0.54 | 3.92 | 0.42 | −0.45 | −0.41 | |
| F2 | 2.12 | −0.72 | −0.18 | 2.06 | −0.34 | −0.09 | 0.84 | ||||
| W-C | 2020 | ME | F1 | 2.82 | −4.04 | 1.11 | 3.90 | 0.07 | −0.81 | −0.32 | |
| W-C | 2021 | ME | F1 | 7.94 | −4.15 | −3.72 | 7.28 | −0.48 | −1.94 | −2.81 | |
| O | 2021 | CH | F1 | −0.37 | 1.069 | −0.47 | −0.04 | 0.17 | 0.36 | 0.60 | |
| S2 | E-C | 2020 | CH | F1 | −0.70 | −0.12 | −0.02 | −0.21 | −0.20 | 0.85 | 1.11 |
| F2 | 1.10 | −0.65 | 0.35 | 0.75 | −0.52 | 0.60 | 0.67 | ||||
| E-C | 2020 | CS | F1 | 2.58 | −0.69 | −0.20 | 1.86 | −0.58 | −0.69 | −0.75 | |
| F2 | 0.38 | −0.54 | −0.02 | 1.57 | 0.24 | 0.24 | −0.80 | ||||
| E-C | 2020 | TR | F1 | −0.40 | 0.64 | −0.45 | −1.18 | −1.02 | 1.15 | 1.27 | |
| F2 | 1.92 | −4.86 | 0.49 | 5.85 | 0.57 | 0.10 | 0.44 | ||||
| W-C | 2020 | CH | F1 | 2.39 | −1.83 | −0.57 | 3.03 | 0.11 | 0.39 | −0.49 | |
| F2 | 0.35 | −0.18 | −0.41 | 1.53 | 1.10 | 0.50 | 0.02 | ||||
| W-C | 2020 | ME | F1 | 3.20 | −2.32 | −0.43 | 4.10 | 0.06 | 0.32 | 0.53 | |
| F2 | 2.91 | −3.70 | 0.76 | 4.72 | −0.58 | −0.97 | 0.40 | ||||
| W-C | 2021 | ME | F1 | 5.31 | −5.10 | −1.95 | 8.49 | −1.22 | −0.60 | −0.49 | |
| O | 2021 | CH | F1 | −0.42 | −0.28 | −0.02 | 0.13 | −0.04 | 0.75 | 1.70 | |
| F2 | −0.96 | 0.54 | 0.21 | −1.04 | 0.44 | 1.76 | 1.14 |
| UAV [%] | S2 [%] | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Field | Year | Variety | N | MZ-1 | MZ-2 | MZ-3 | MZ-1 | MZ-2 | MZ-3 |
| E-C | 2020 | CH | 58 | 58.3 | 75.9 | 41.7 | 65.4 | 66.7 | |
| E-C | 2020 | CS | 38 | 100 | 69.2 | 71.4 | 57.1 | 60 | 90.9 |
| E-C | 2020 | TR | 16 | 100 | 83.3 | 100 | 100 | 83.3 | 83.3 |
| W-C | 2020 | CH | 34 | 100 | 90.9 | 62.5 | 100 | 46.2 | 57.1 |
| W-C | 2020 | ME | 28 | 100 | 60 | 85.7 | 50 | 60 | 73.3 |
| W-C | 2021 | ME | 14 | 100 | 100 | 100 | 88.9 | ||
| O | 2021 | CH | 61 | 64.9 | 62.5 | 81.8 | 72.7 | 75 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortuani, B.; Mayer, A.; Bianchi, D.; Sona, G.; Crema, A.; Modina, D.; Bolognini, M.; Brancadoro, L.; Boschetti, M.; Facchi, A. Effectiveness of Management Zones Delineated from UAV and Sentinel-2 Data for Precision Viticulture Applications. Remote Sens. 2024, 16, 635. https://doi.org/10.3390/rs16040635
Ortuani B, Mayer A, Bianchi D, Sona G, Crema A, Modina D, Bolognini M, Brancadoro L, Boschetti M, Facchi A. Effectiveness of Management Zones Delineated from UAV and Sentinel-2 Data for Precision Viticulture Applications. Remote Sensing. 2024; 16(4):635. https://doi.org/10.3390/rs16040635
Chicago/Turabian StyleOrtuani, Bianca, Alice Mayer, Davide Bianchi, Giovanna Sona, Alberto Crema, Davide Modina, Martino Bolognini, Lucio Brancadoro, Mirco Boschetti, and Arianna Facchi. 2024. "Effectiveness of Management Zones Delineated from UAV and Sentinel-2 Data for Precision Viticulture Applications" Remote Sensing 16, no. 4: 635. https://doi.org/10.3390/rs16040635
APA StyleOrtuani, B., Mayer, A., Bianchi, D., Sona, G., Crema, A., Modina, D., Bolognini, M., Brancadoro, L., Boschetti, M., & Facchi, A. (2024). Effectiveness of Management Zones Delineated from UAV and Sentinel-2 Data for Precision Viticulture Applications. Remote Sensing, 16(4), 635. https://doi.org/10.3390/rs16040635