
Patch-Based Surface Accuracy Control for Digital Elevation Models by Inverted Terrestrial Laser Scanning (TLS) Located on a Long Pole



Abstract
1. Introduction
2. Material and Methodology
2.1. Data Collection
- The “high” tripod was constructed expressly for this purpose, with the ability to extend the legs up to 4.5 m. The legs are divided into 2 sections, with it being possible to use a single section in adverse wind conditions or mount the 2 sections to reach their maximum extension. Figure 2b shows the high tripod with the assembly of a single section of legs; Figure 2a shows a conventional tripod, such as those used by total stations, for comparison.
- The eccentric support allows the TLS to be separated 40 cm from the telescopic mast and thus reduce the shadow areas projected by the mast.
- The telescopic pole/mast is the PHOTOMAST MK2 10 m, which can be extended up to 10 m and is made of high-density carbon fiber, which gives it great stability.
- In our case the scanner used is the Leica BLK360. The BLK360 range measuring accuracy, which is 6 mm for a range of 10 m, guarantees better accuracy than usual LiDAR flights and the derived DEMs, whose positional quality is intended to be evaluated.
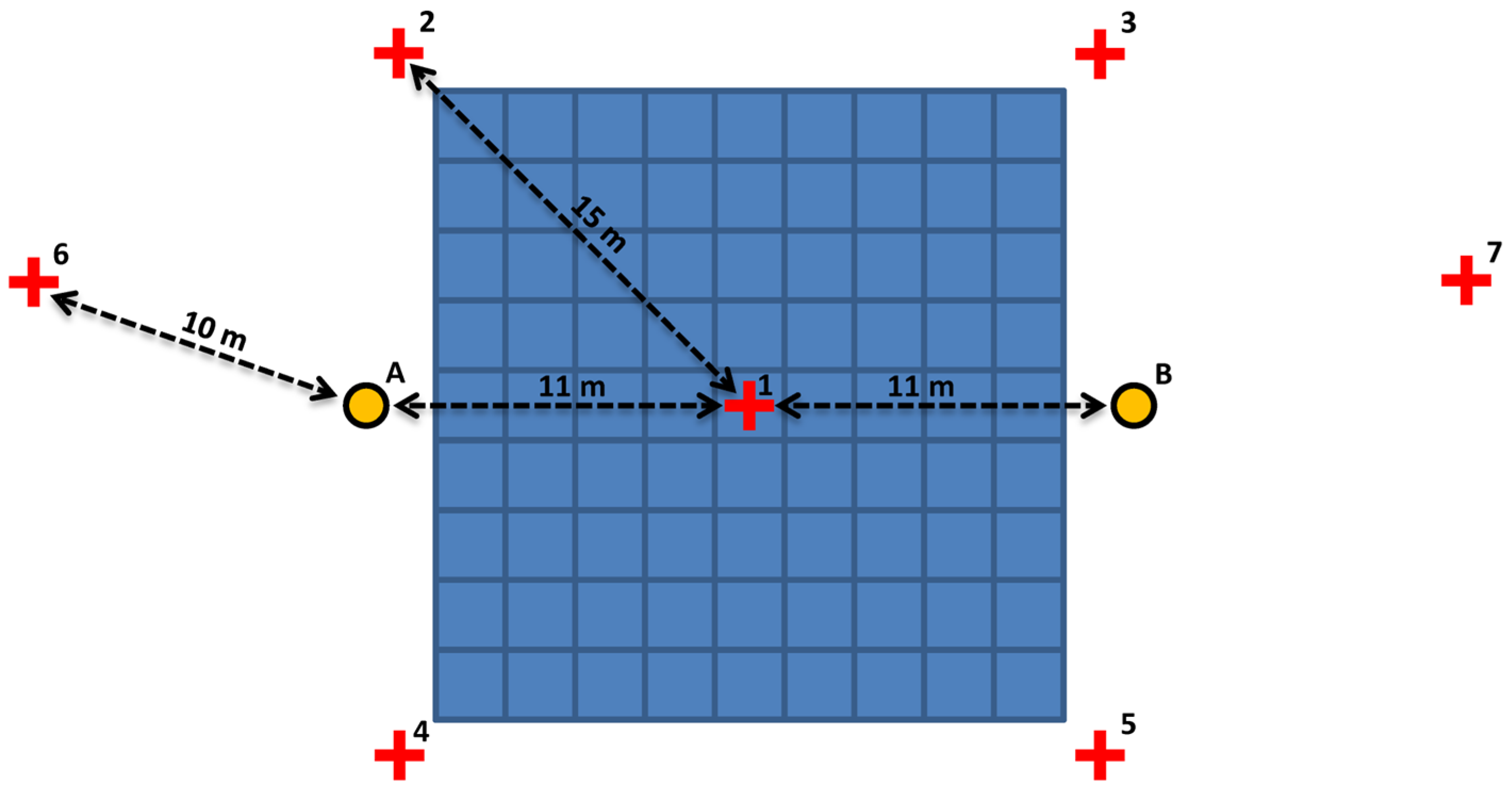
- Surface or control patch: the area of interest is the blue squared area, whose sides approximately follow a north–south and east–west orientation.
- Scan locations: The orange circles mark the locations A and B where the telescopic pole will be located. These two positions will follow roughly an east–west (or north–south) direction and will be about 11 m from the center of the patch (and, therefore, 22 m from each other). The 11 m are given by the 9 m from the patch center to its perimeter, plus 2 m to avoid the equipment being positioned directly over the patch.
- Georeferencing targets: The red crosses mark the position of a set of targets. The target coordinates will be obtained by GNSS observations and, therefore, used to georeference the scans. As can be seen in Figure 3, location A is surrounded by four targets (1, 2, 4 and 6) at a distance of about 10 m, and the same for location B (targets, 1, 3, 5 and 7). It can also be observed that both the patch area and the scanner stations are contained inside the convex hull of the targets, which is convenient in any coordinate transformation operation.
2.2. Post-Processing Phase of Collected Data
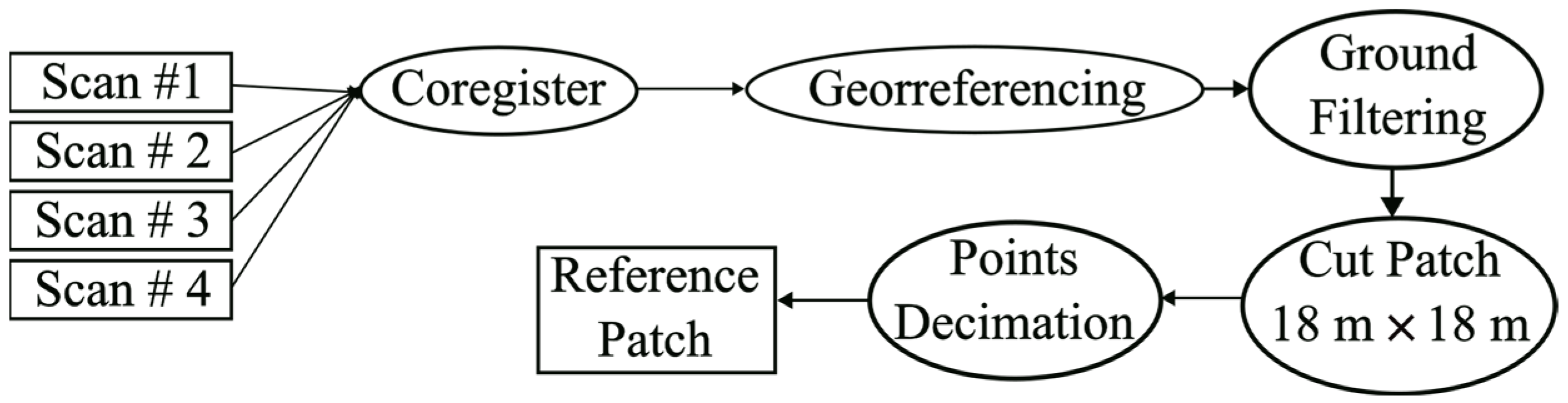
- PCs registration: The PCs are to be aligned one to another by finding a transformation that minimizes the difference between them. A single PC is obtained from this first step.
- PC georeferencing: The set of targets referred to in Table 2 are included in the PC, but also surveyed with GNSS in a specified CRS (e.g., ETRS89 and ellipsoidal height). Therefore, the center of the targets represents a set of ground control points (GCPs) which allow us to perform a coordinate transformation. The PC is to be transformed to the specified CRS. After steps 1 and 2, we obtain a registered georeferenced point cloud (RGPC).
- PC weeding: Ground filtering, clipping and decimation. The PC usually includes points that do not belong to the ground (fences, bushes, trees, people, cars, tripod, etc.). Also it includes points that are outside the limits of the patch of 18 m × 18 m. The density of points could also be much higher than required, especially if a DEM is to be obtained from the PC by interpolation. In consequence, the PC is to be (a) ground filtered, (b) clipped to the patch size and (c) decimated as required (e.g., applying a criterion based on the mean separation between points). After step 3, we obtained the PAref.
- 4.
- DEM interpolation from the PC: a DEM is obtained from PAref by interpolation, e.g., after a Voronoi triangulation over the PC.
2.3. Positional Accuracy of the RGPC
- The scanner is stable while measuring; therefore, the vibration of the measurement equipment is not a source of uncertainty.
- The scanner’s exact location is arbitrary and, therefore, there is no uncertainty in its position.
- The scanner does not require to be leveled, so there is no uncertainty in its inclination. Also, centering uncertainty [16] does not apply.
2.3.1. Local Positional Uncertainty of a Point of the PC
2.3.2. Absolute Positional Uncertainty (APU) of a Point of the RGPC
- The local coordinates of the GCPs are known from the PC and their uncertainty estimated through the value of the SSSD commented above (0.006 m at 10 m range).
- The absolute coordinates of the GCPs are obtained from a GNSS real-time kinematic (RTK) measurement. The quality of the data capture is usually known during the measurement, which can be considered a GNSS spherical standard deviation (GSSD) (0.03 m in our case, as will be mentioned in the following section). But the inclination of the hand-held rod-mounted GNSS antenna also influences the horizontal quality, with a rod standard deviation (RSD) which can be estimated at 0.005 m if a circular level is used and the antenna height is 2 m (in [18], it is estimated at 0.003 m for a height of 1.3 m). Furthermore, it must be considered that the center of each target will be identified as the closest point to the target center from the point cloud. This is another source of uncertainty, which can be called target center estimation (TCE), and is dependent on the density of the PC at 10 m. Considering a density of 0.01 m, the TCE could be estimated as 1/2 of the density, that is, 0.005 m.
2.4. Methodology for the Patch-Based Accuracy Control of a DEM
3. Practical Case
3.1. Software Quality Results
- A registration overall error of 0.008 m is obtained. The error between each possible pair of PCs, labeled by a link number, is also included, with values ranging from 0.003 m to 0.021 m. These results are consistent with the local positional uncertainty commented on in Section 2.3, which was represented by the parameter SSSD20 from the manufacturer. Considering this parameter as equal for each PC, with a value of 0.008 m, the value of the difference between two PCs can be assumed to be SSSD20 × 21/2 = 0.011 m. Only link six seems to be higher than expected.
- A mean georeferencing error of 0.021 m is obtained. The error for each target is also included, with values ranging between 0.004 m and 0.038 m. These results are consistent with the APU value from Section 2.3.
3.2. Deriving DEMref from the RGPC
3.3. Example of Positional Accuracy Analysis Using the Sample of Patches (DEMref)
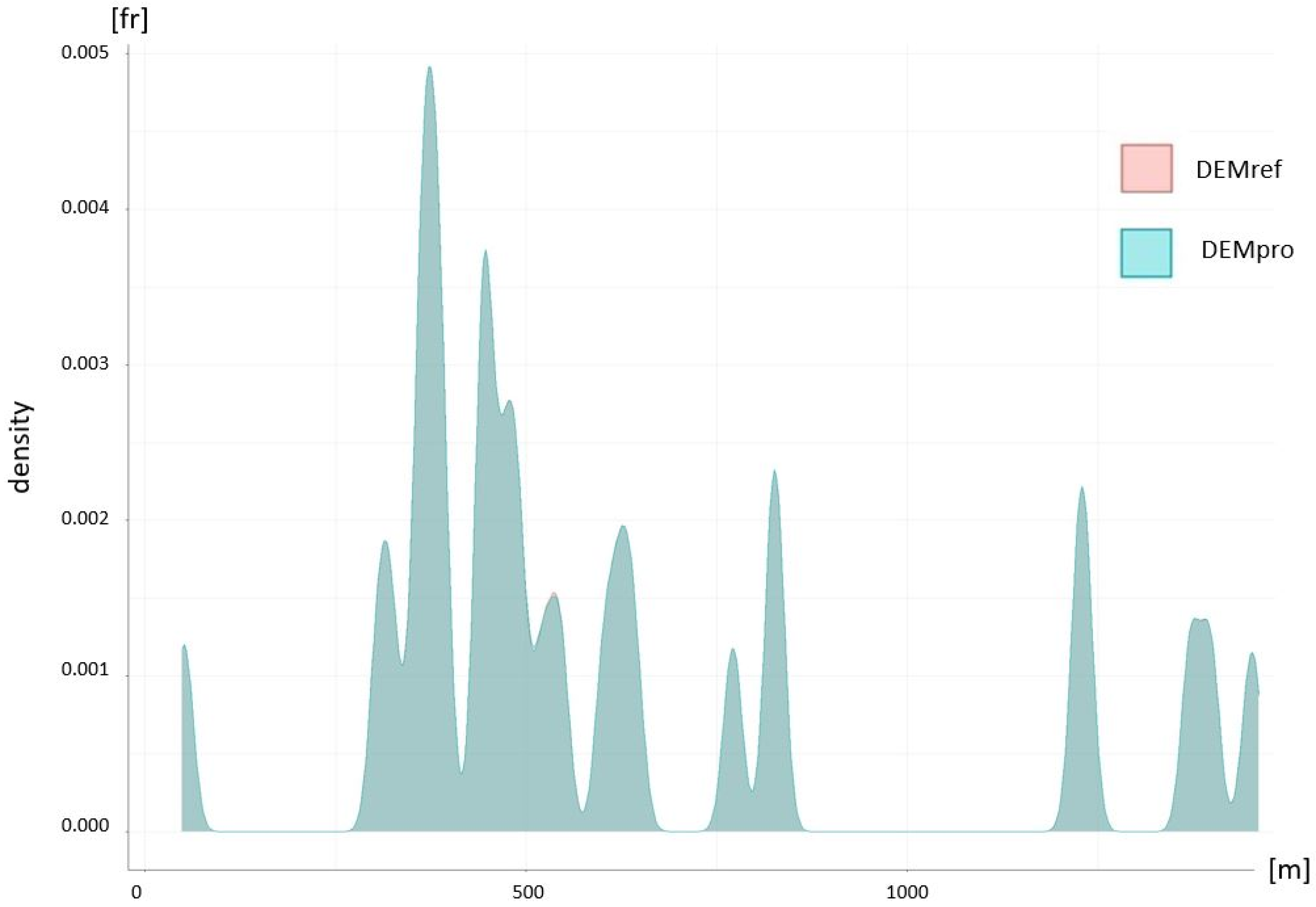
3.3.1. Analysis of the Elevation Distribution Functions of DEMref and DEMpro
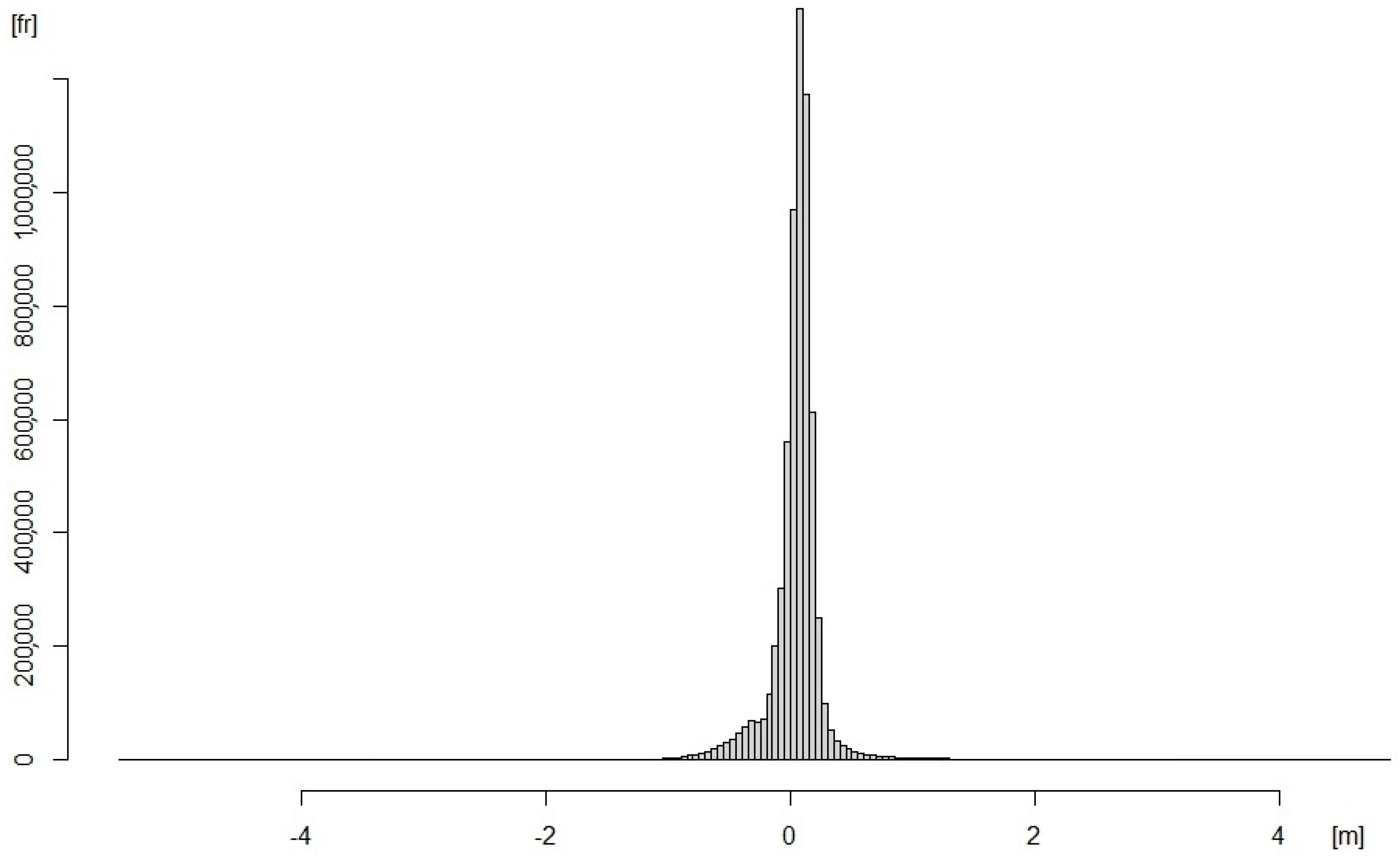
3.3.2. Analysis of the Discrepancies Between DEMref and DEMpro
- Obtaining the histogram (Figure 7) is recommended to begin the analysis. It can be seen that the curve does not present symmetry and that it does not follow the shape of the Gaussian bell as it is more pointed.
- The normal probability plot (Figure 8) is a special case of the Q–Q probability plot which compares the distribution of a sample to a theoretical standard normal distribution. It helps to confirm that the discrepancy data are not normal since the points in the chart would then lie close to a straight line.
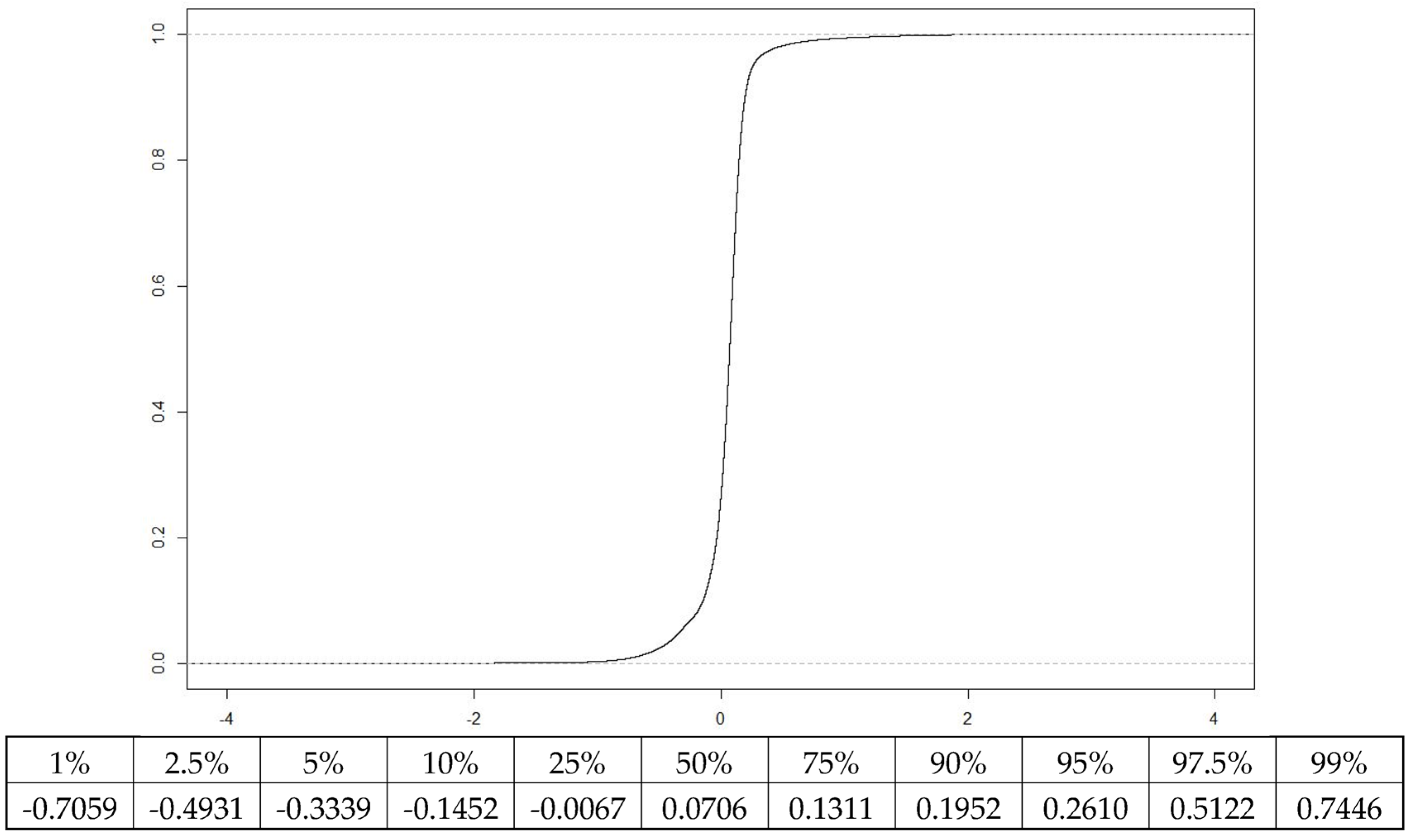
- The probability distribution (Figure 9) is accompanied by the percentiles presented at the bottom of the chart. Requested from the procedure in Table 4, 95 percent of the cases are in the interval . From another point of view, if we consider the interval given by the 50% percentile (0.0706 m) and the vertical uncertainty indicated for the experimental LiDAR flight (σ = ±0.15 m), we obtain the interval [−0.0794, 0.2206] m, for which the probability included is 0.7803. This value is somewhat greater than 0.682, which is the probability in the interval [−1σ, +1σ] in a normal distribution function with parameters mean = 0 and σ = 1. This implies that the observed data have a somewhat smaller dispersion than those from a normal distribution. Also, from the data, it can be deduced that there is a bias since the value corresponding to the 50% percentile is 0.0706 m.
3.4. Estimation of Costs for Field Data Collection
3.5. Comparison with a Point-Based PAAM
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- ISO 19157-1:2023; Geographic Information—Data Quality—Part 1: General Requirements. International Organization for Standardization: Geneva, Switzerland, 2023.
- Bühler, Y.; Marty, M.; Ginzler, C. High Resolution DEM Generation in High-Alpine Terrain Using Airborne Remote Sensing Techniques. Trans. GIS 2012, 16, 635–647. [Google Scholar] [CrossRef]
- ASPRS. ASPRS Positional Accuracy Standards for Digital Geospatial Data, 2nd ed.; American Society for Photogrammetry and Remote Sensing: Baton Rouge, LA, USA, 2023. [Google Scholar]
- Zandbergen, P.A. Positional Accuracy of Spatial Data: Non-Normal Distributions and a Critique of the National Standard for Spatial Data Accuracy. Trans. GIS 2008, 12, 103–130. [Google Scholar] [CrossRef]
- Maune, D.F.; Nayegandhi, A. (Eds.) Digital Elevation Model Technologies and Applications: The DEM Users Manual, 3rd ed.; ASPRS: Baton Rouge, LA, USA, 2019. [Google Scholar]
- Ariza López, F.J.; Atkinson Gordo, A.D. Analysis of Some Positional Accuracy Assessment Methodologies. J. Surv. Eng. 2008, 134, 45–54. [Google Scholar] [CrossRef]
- Mesa-Mingorance, J.L.; Ariza-López, F.J. Accuracy Assessment of Digital Elevation Models (DEMs): A Critical Review of Practices of the Past Three Decades. Remote Sens. 2020, 12, 2630. [Google Scholar] [CrossRef]
- Ariza-López, F.J.; García-Balboa, J.L.; Rodríguez-Avi, J.; Robledo-Ceballos, J. Guide for the Positional Accuracy Assessment of GEOSPATIAL Data; Occasional Publications #563; Pan American Institute of Geography and History: Mexico City, Mexico, 2021. [Google Scholar]
- Ariza-López, F.J.; Rodríguez-Avi, J.; Reinoso-Gordo, J.F.; Mozas-Calvache, A.T.; Ruiz-Lendínez, J.J.; García-Balboa, J.L. Evaluación de MDE por medio de parches de control. In Proceedings of the XIX Congreso de Tecnologías de la Información Geográfica, Zaragoza, Spain, 12–14 September 2022; TIG al servicio de los, ODS. de la Riva-Fernández, J., Lamelas-Gracias, M.T., Montorio-Llovería, R., Pérez-Cabello, F., Rodrigues-Mimbrero, M., Eds.; Servicio de Publicaciones Universidad de Zaragoza: Zaragoza, Spain, 2022. [Google Scholar]
- Kim, M.; Park, S.; Danielson, J.; Irwin, J.; Stensaas, G.; Stoker, J.; Nimetz, J. General External Uncertainty Models of Three-Plane Intersection Point for 3D Absolute Accuracy Assessment of Lidar Point Cloud. Remote Sens. 2019, 11, 2737. [Google Scholar] [CrossRef]
- Brown, R.; Hartzell, P.; Glennie, C. Evaluation of SPL100 Single Photon Lidar Data. Remote Sens. 2020, 12, 722. [Google Scholar] [CrossRef]
- Zandbergen, P.A. Characterizing the error distribution of lidar elevation data for North Carolina. Int. J. Remote Sens. 2011, 32, 409–430. [Google Scholar] [CrossRef]
- Ariza-López, F.J.; Rodríguez-Avi, J.; González-Aguilera, D.; Rodríguez-Gonzálvez, P. A New Method for Positional Accuracy Control for Non-Normal Errors Applied to Airborne Laser Scanner Data. Appl. Sci. 2019, 9, 3887. [Google Scholar] [CrossRef]
- Uggla, G.; Horemuz, M. Conceptualizing Georeferencing for Terrestrial Laser Scanning and Improving Point Cloud Metadata. J. Surv. Eng. 2021, 147, 02520001. [Google Scholar] [CrossRef]
- JCGM 100:2008; OIML Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement. Joint Committee for Guides in Metrology: Paris, France, 2008.
- García-Balboa, J.L.; Ruiz-Armenteros, A.M.; Rodríguez-Avi, J.; Reinoso-Gordo, J.F.; Robledillo-Román, J. A Field Procedure for the Assessment of the Centring Uncertainty of Geodetic and Surveying Instruments. Sensors 2018, 18, 3187. [Google Scholar] [CrossRef] [PubMed]
- Leica Geosystems AG. Leica BLK360 User Manual Version 2.0 English; Leica Geosystems AG: Heinrich-Wild-Strasse, Heerbrugg, Switzerland, 2017. [Google Scholar]
- Ruiz-Armenteros, A.M.; García-Balboa, J.L.; Mesa-Mingorance, J.L.; Ruiz-Lendínez, J.J.; Ramos-Galán, M.I. Contribution of instrument centring to the uncertainty of a horizontal angle. Surv. Rev. 2013, 45, 305–314. [Google Scholar] [CrossRef]
- Mandlburger, G.; Jutzi, B. On the Feasibility of Water Surface Mapping with Single Photon LiDAR. ISPRS Int. J. Geo-Inf. 2019, 8, 188. [Google Scholar] [CrossRef]
- Shi, W. Principles of Modeling Uncertainties in Spatial Data and Spatial Analyses; CRC Press: Boca Raton, FL, USA, 2009; ISBN 978-0-429-14952-8. [Google Scholar]
- ASPRS. ASPRS Positional Accuracy Standards for Digital Geospatial Data. Photogramm. Eng. Remote Sens. 2015, 81, A1–A26. [Google Scholar] [CrossRef]
- Pastore, M.; Calcagnì, A. Measuring Distribution Similarities Between Samples: A Distribution-Free Overlapping Index. Front. Psychol. 2019, 10, 01089. [Google Scholar] [CrossRef] [PubMed]
- FGDC. Geospatial Positioning Accuracy Standards, Part 3: National Standard for Spatial Data Accuracy; FGDC-STD-007.3-1998; Federal Geographic Data Committee: Reston, VA, USA, 1998.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Description |
|---|---|
| Human team | At least 2 experienced technicians handling TLS and GNSS instruments. |
| Material equipment | Site map, sketch and coordinates for every patch (for ease of location) Tripod Telescopic pole Hand level for pole Eccentric support for inverted scanner mounting TLS equipment (and batteries) GNSS equipment (1 receiver for base and 1 receiver for rover) 2 SIM cards (from different telephone networks) iPad tablet Hand electronic distance meter (EDM) Wind pennant Tadder Targets (≥7) 3 signaling cones |
| Step | Description |
|---|---|
| 1 | Patch center staking out.
|
| 2 | Scan locations A and B staking out.
|
| 3 | Targets distribution on the patch.
|
| 4 | Picture from the patch.
|
| 5 | Target measuring with GNSS equipment.
|
| 6 | Scanning from scan location A.
|
| 7 | Scanning from location B.
|
| 8 | Final checking.
|
| Name | Abbreviature | Description and Quantification |
|---|---|---|
| Scanning spherical standard deviation at 20 m | SSSD20 | Measurement uncertainty from manufacturer′s specification, 0.008 m in the case of Leica BLK 360. |
| Target center estimation | TCE | Half the density of points when scanning targets, 1/2 × 0.01 m in our scanning configuration. |
| Scanning spherical standard deviation at 10 m | SSSD10 | Measurement uncertainty from manufacturer’s specification, 0.006 m in the case of Leica BLK 360. |
| GNSS spherical standard deviation | GSSD | Measurement uncertainty offered by the GNSS equipment in RTK. 0.03 m in our RTK measurement. |
| Rod standard deviation | RSD | Inclination of the hand-held rod-mounted GNSS antenna. Estimated at 0.005 m. |
| Comparison Method | With Sources Having Higher Accuracy. |
|---|---|
| Positional component | Vertical. |
| Element type | Patches. Each patch is given by a DEM. |
| Accuracy standard | A result is provided, and the user has to consider whether or not it is fit for purpose. It is expressed by the range from 5- to 95-percentile (a 90% percentile range centered on the median value). |
| Description | The product is compared to a reference with higher accuracy. The vertical component of the product is assessed. A sample of at least 30 well-distributed patches is used. Accuracy is evaluated through the observed distribution function from the elevation differences between the product and the reference. It allows us to avoid evaluating accuracy through parameters. This situation is preferred for DEMs since it is known that the error does not always follow a parametric distribution, like the normal distribution. |
| Procedure | It is given that a sample of n (n ≥ 30) reference patches (DEMref) is available and:
|
|
where: is the elevation in the product. is the interpolated elevation in the reference.
| |
| Parameter | Value | Description |
|---|---|---|
| Number of scans | 4 | Number of PCs that have been measured |
| Number of links | 6 | Number of pairs from the number of PCs |
| Overall cloud-to-cloud error | 0.008 m | Mean error from the registration process |
| Cloud-to-cloud error: Link 1 Link 2 Link 3 Link 4 Link 5 Link 6 | 0.008 m 0.013 m 0.009 m 0.003 m 0.009 m 0.021 m | Mean error between each pair of PCs from the registration process |
| Mean georeferencing error | 0.021 m | Mean error in each target after registration and georeferencing |
| Error in each target: Target 1 Target 2 Target 3 Target 4 Target 5 Target 6 Target 7 | 0.031 m 0.038 m 0.007 m 0.013 m 0.023 m 0.004 m 0.012 m | Mean error in each target after registration and georeferencing |
| # | Item | Point-Based (Traditional Methods) | Patch-Based |
|---|---|---|---|
| 1 | Comparison method | With sources having higher accuracy | With sources having higher accuracy |
| 2 | Quality component | Vertical Accuracy | Vertical accuracy, surface derivates (slope, aspect, curvatures, flatness) |
| 3 | Element type | Isolated points | Point cloud |
| 4 | Required equipment | GNSS (1) | GNSS + TLS |
| 5 | Complementary equipment | Standard pole | Targets, long pole Special tripod, etc. |
| 6 | Cost of the equipment | Medium (several thousand EUR/USD) | High (several tens of thousands EUR/USD) |
| 7 | Minimum human team | 1 operator (2) | 2 operators |
| 8 | Applicable positional accuracy standards | EMAS, NSSDA, ASPRS, UNE 148,002, etc. (3) | Not available yet |
| 9 | Sample size | Minimum recommendation: 20 ground control points | Minimum recommendation: 20 ground control patches |
| 10 | Sampling scheme | Random | Random |
| 11 | Time required for the collection of a sample (4) | Short (a few minutes) | Medium (1 h) |
| 12 | Complexity of data analysis | Low, point-to-point discrepancies are calculated and quality measures (e.g., RMSE) are derived | Medium, the patch and the homologous surface must be available. Interpolations must be performed or work with TIN. The distribution function is generated |
| 13 | Information provided by the result for the case of estimation-based standards (5) | A parameter (e.g., RMSE, or standard deviation) under a normal probability distribution assumption. For example, meters for a given confidence level (e.g., 5 m at 95% confidence level) (see NSSDA). | Quantile (values corresponding to the desired percentile). The observed distribution function is available |
| 14 | Information provided by the result for the case of control-based standards (6) | An acceptance or rejection decision under a normal probability distribution assumption of the parameters | Acceptance or rejection based on the observed distribution function |
| Measure | Value |
|---|---|
| RMSE | 0.082 m |
| NSSDAz | 0.160 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reinoso-Gordo, J.F.; Ariza-López, F.J.; García-Balboa, J.L. Patch-Based Surface Accuracy Control for Digital Elevation Models by Inverted Terrestrial Laser Scanning (TLS) Located on a Long Pole. Remote Sens. 2024, 16, 4516. https://doi.org/10.3390/rs16234516
Reinoso-Gordo JF, Ariza-López FJ, García-Balboa JL. Patch-Based Surface Accuracy Control for Digital Elevation Models by Inverted Terrestrial Laser Scanning (TLS) Located on a Long Pole. Remote Sensing. 2024; 16(23):4516. https://doi.org/10.3390/rs16234516
Chicago/Turabian StyleReinoso-Gordo, Juan F., Francisco J. Ariza-López, and José L. García-Balboa. 2024. "Patch-Based Surface Accuracy Control for Digital Elevation Models by Inverted Terrestrial Laser Scanning (TLS) Located on a Long Pole" Remote Sensing 16, no. 23: 4516. https://doi.org/10.3390/rs16234516
APA StyleReinoso-Gordo, J. F., Ariza-López, F. J., & García-Balboa, J. L. (2024). Patch-Based Surface Accuracy Control for Digital Elevation Models by Inverted Terrestrial Laser Scanning (TLS) Located on a Long Pole. Remote Sensing, 16(23), 4516. https://doi.org/10.3390/rs16234516