

Identification of Complex Slope Subsurface Strata Using Ground-Penetrating Radar

Abstract
1. Introduction
2. Methodology
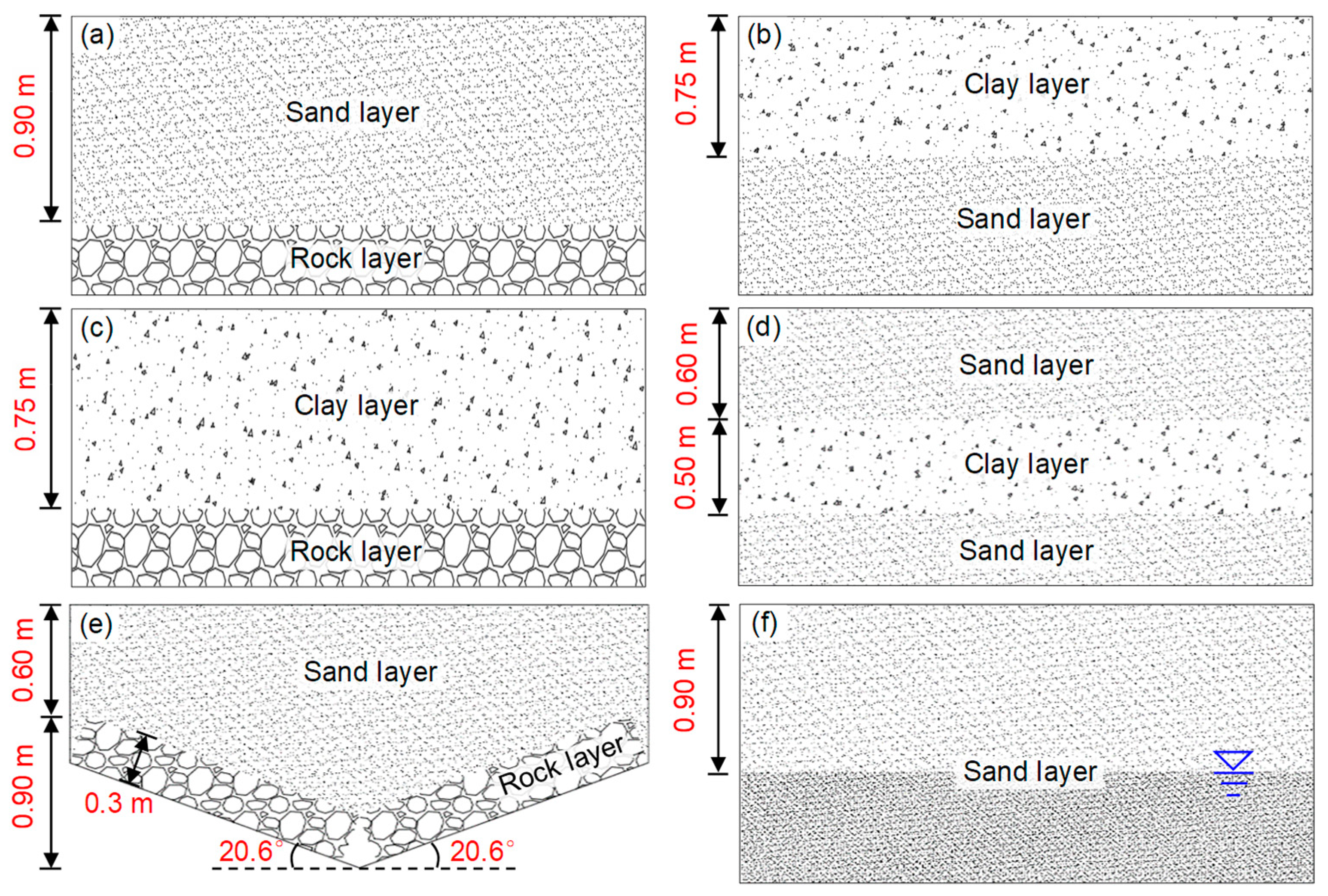
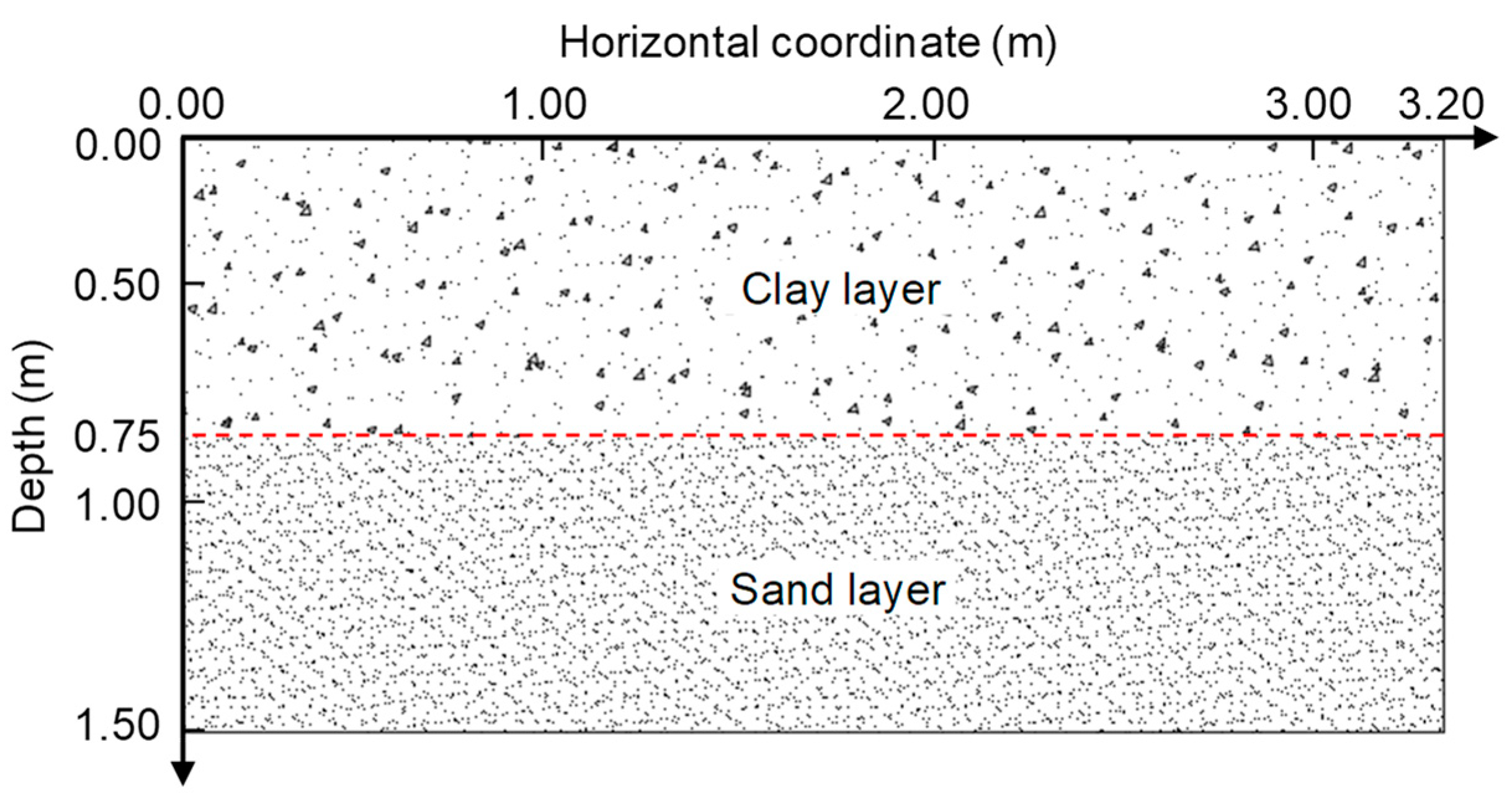
2.1. Stratigraphic Model
2.2. Ground-Penetrating Radar
2.3. Experimental Tests
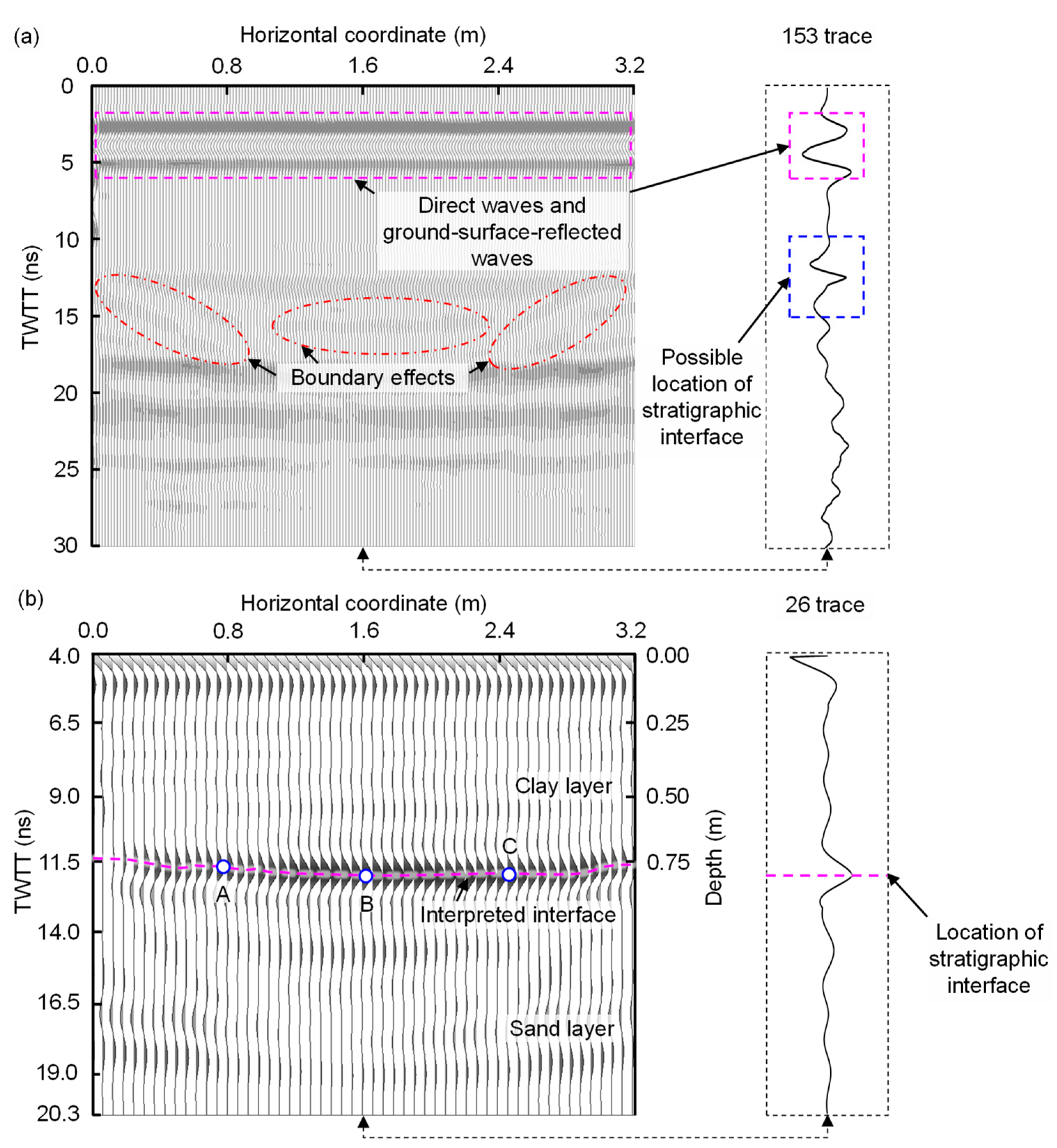
2.4. Interpretation of GPR Data
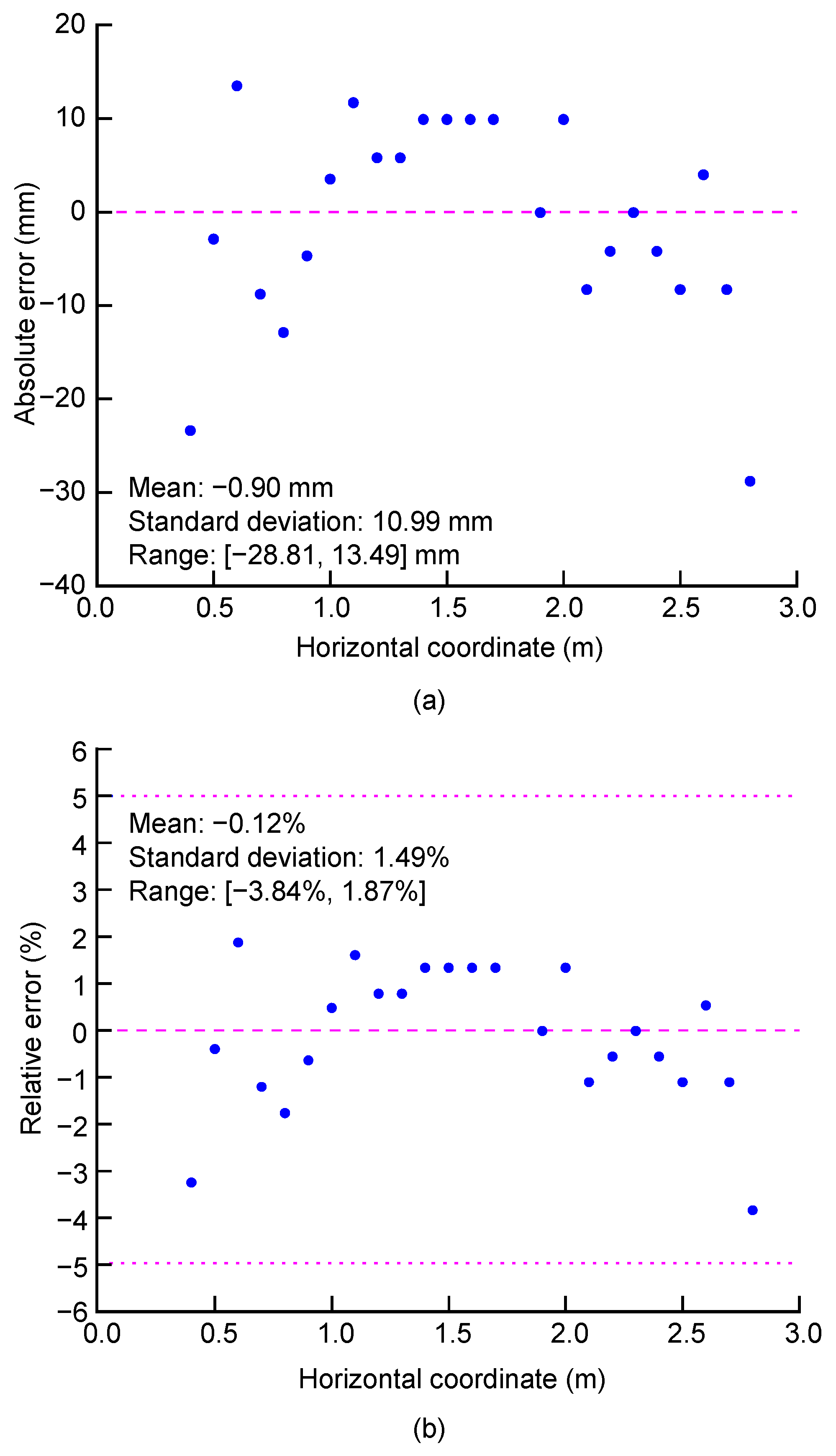
2.5. Accuracy of Strata Identification
3. Experimental Results
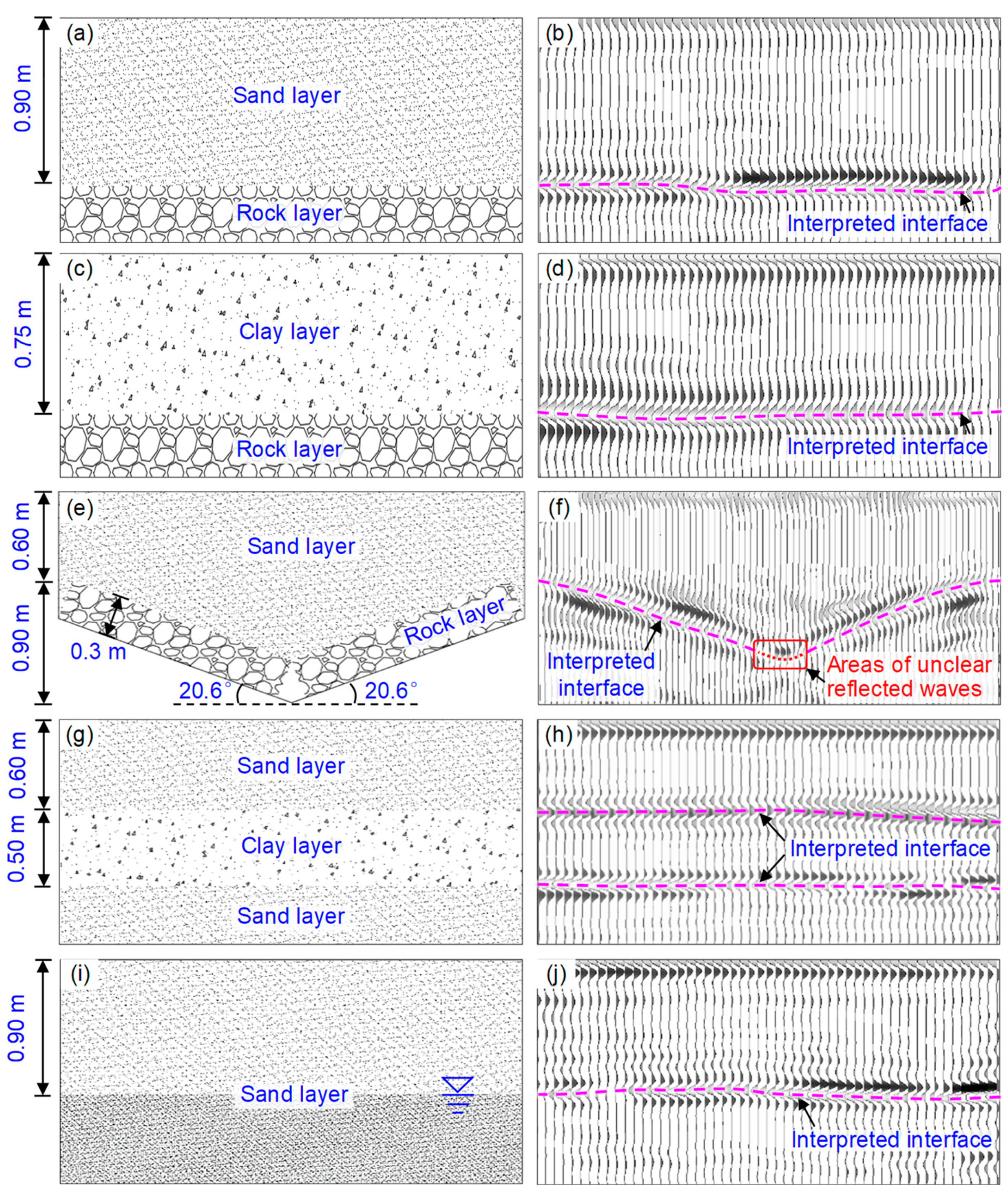
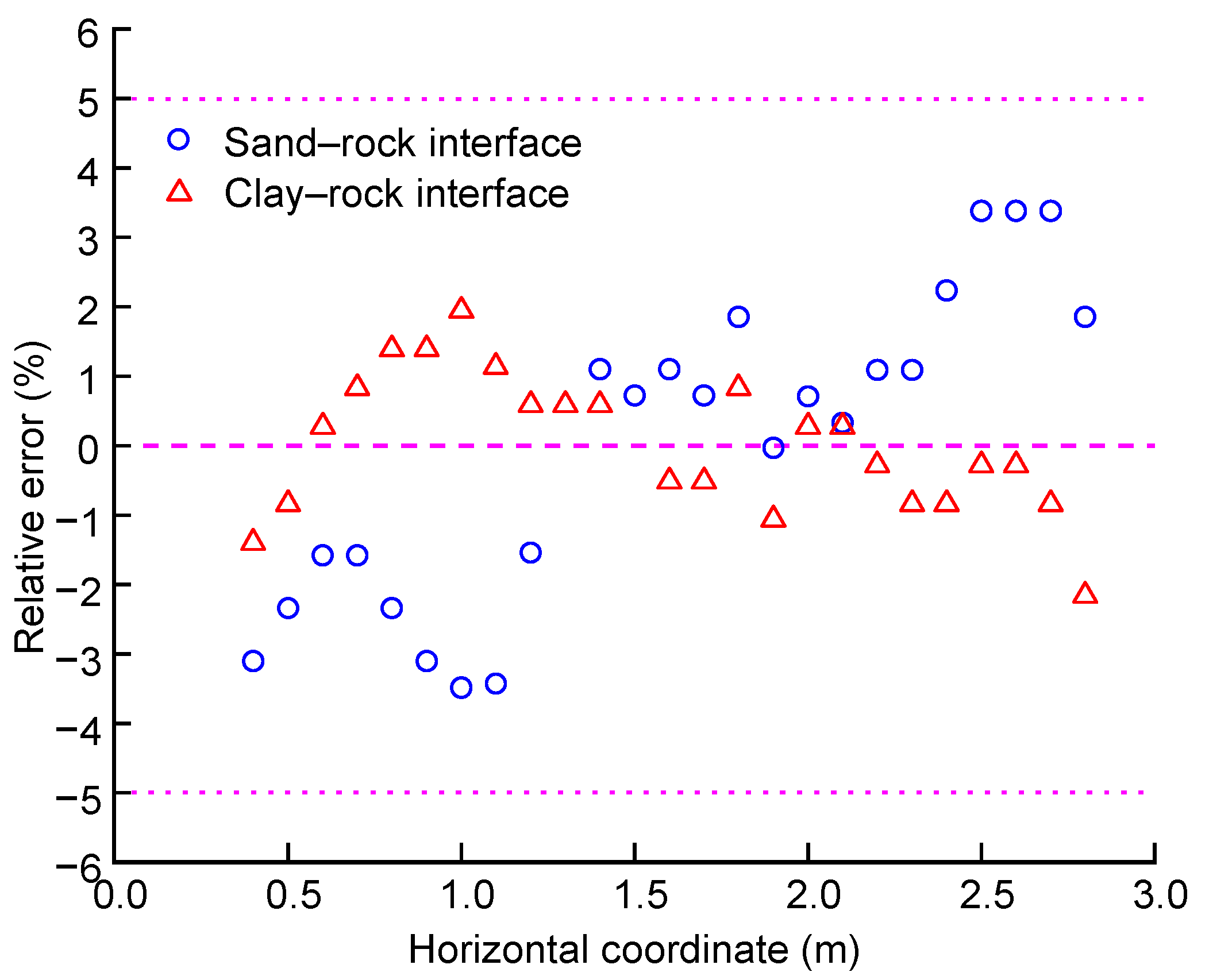
3.1. Identification of Horizontal Rock Layer
3.2. Identification of Inclined Rock Layer
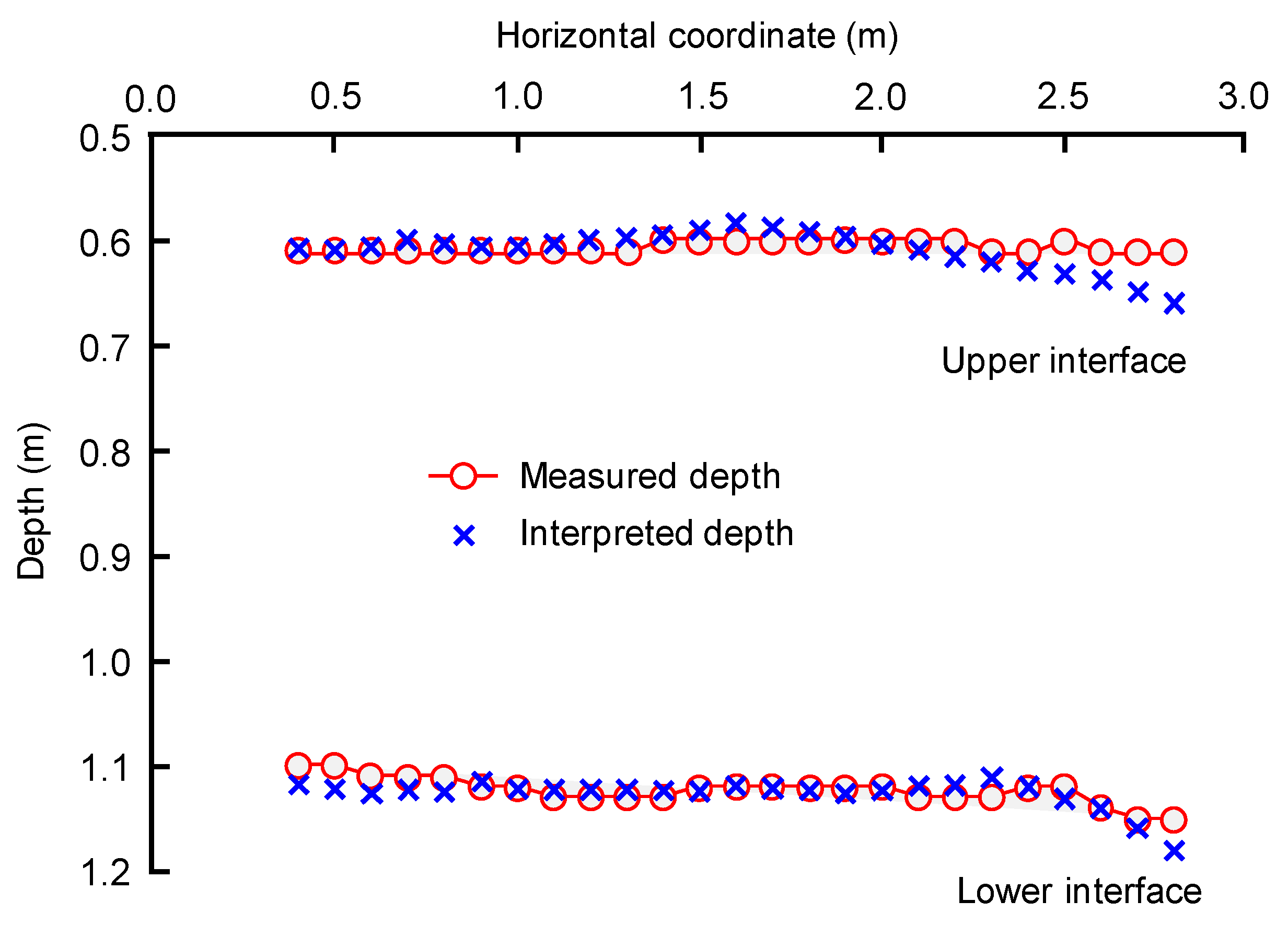
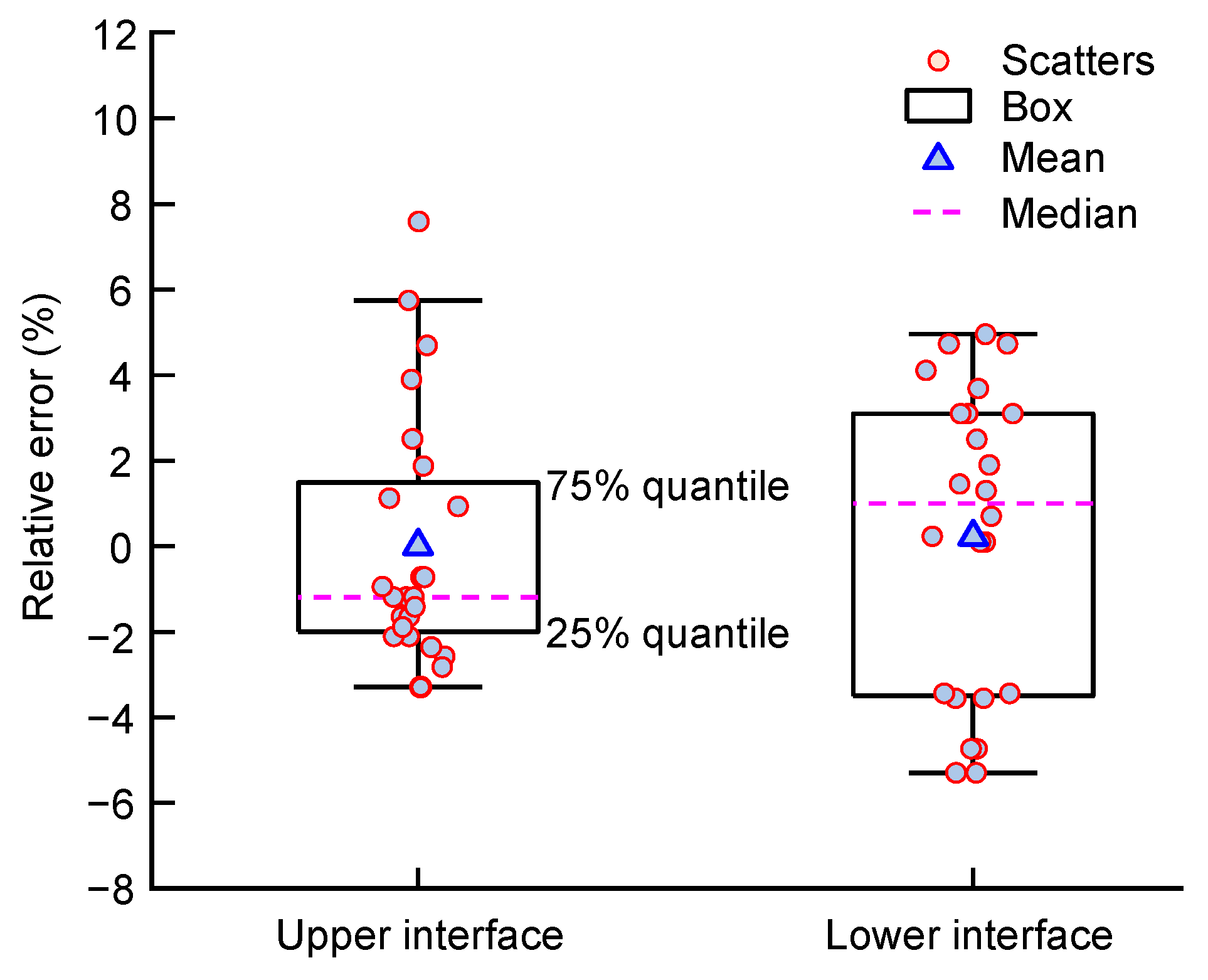
3.3. Identification of Interbedded Clay Layer
3.4. Identification of Water Table in a Sand Layer
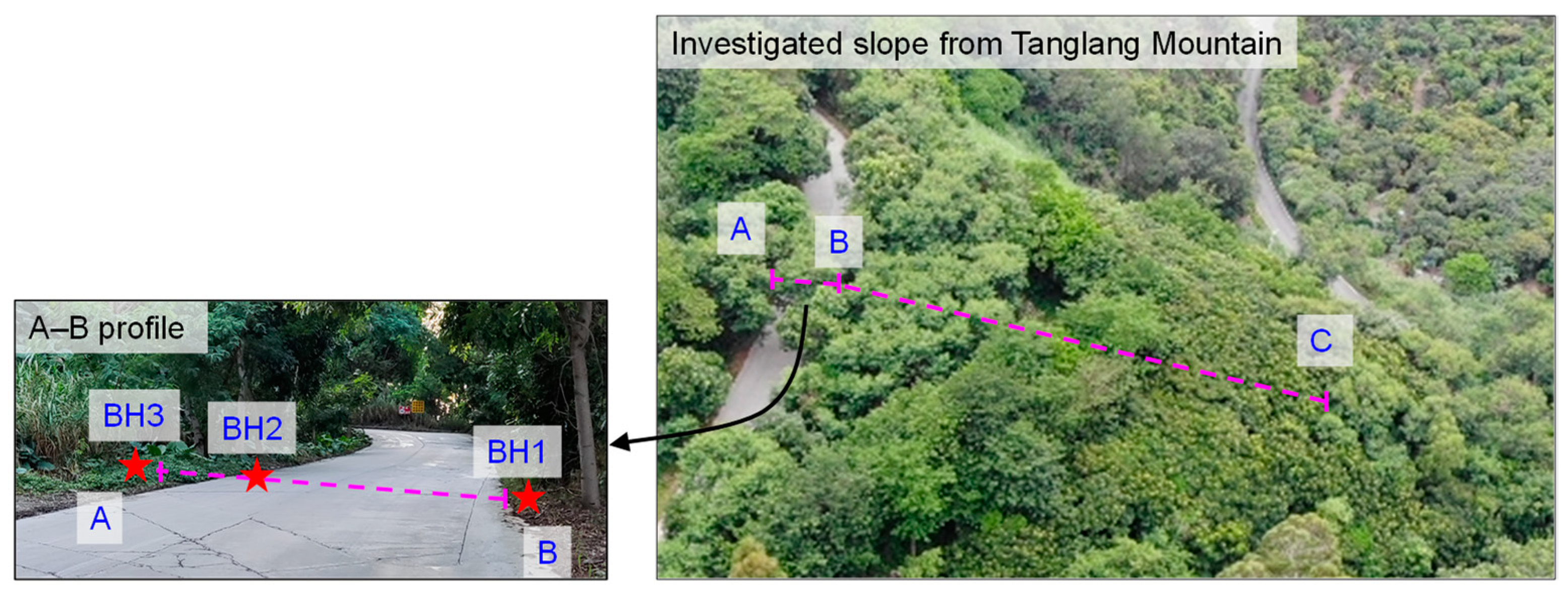
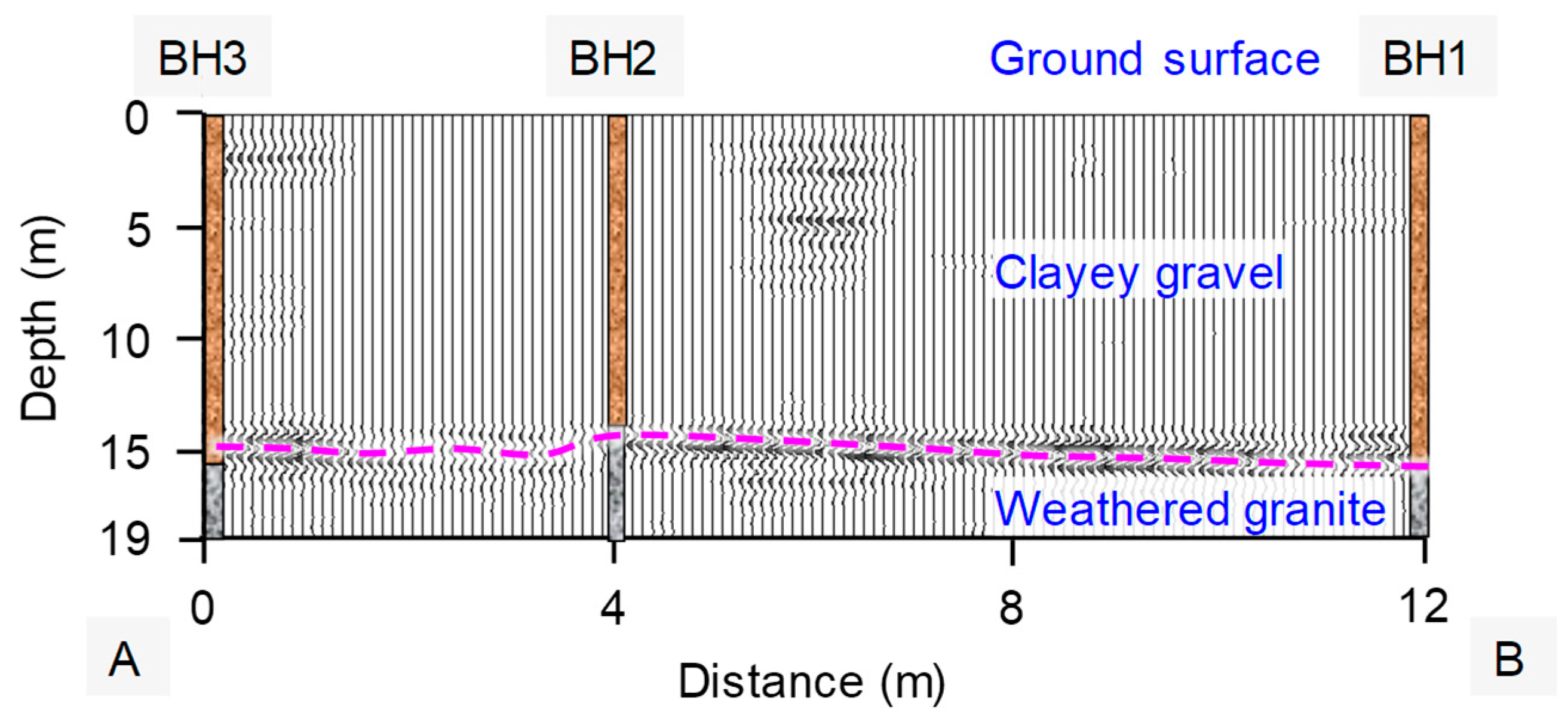
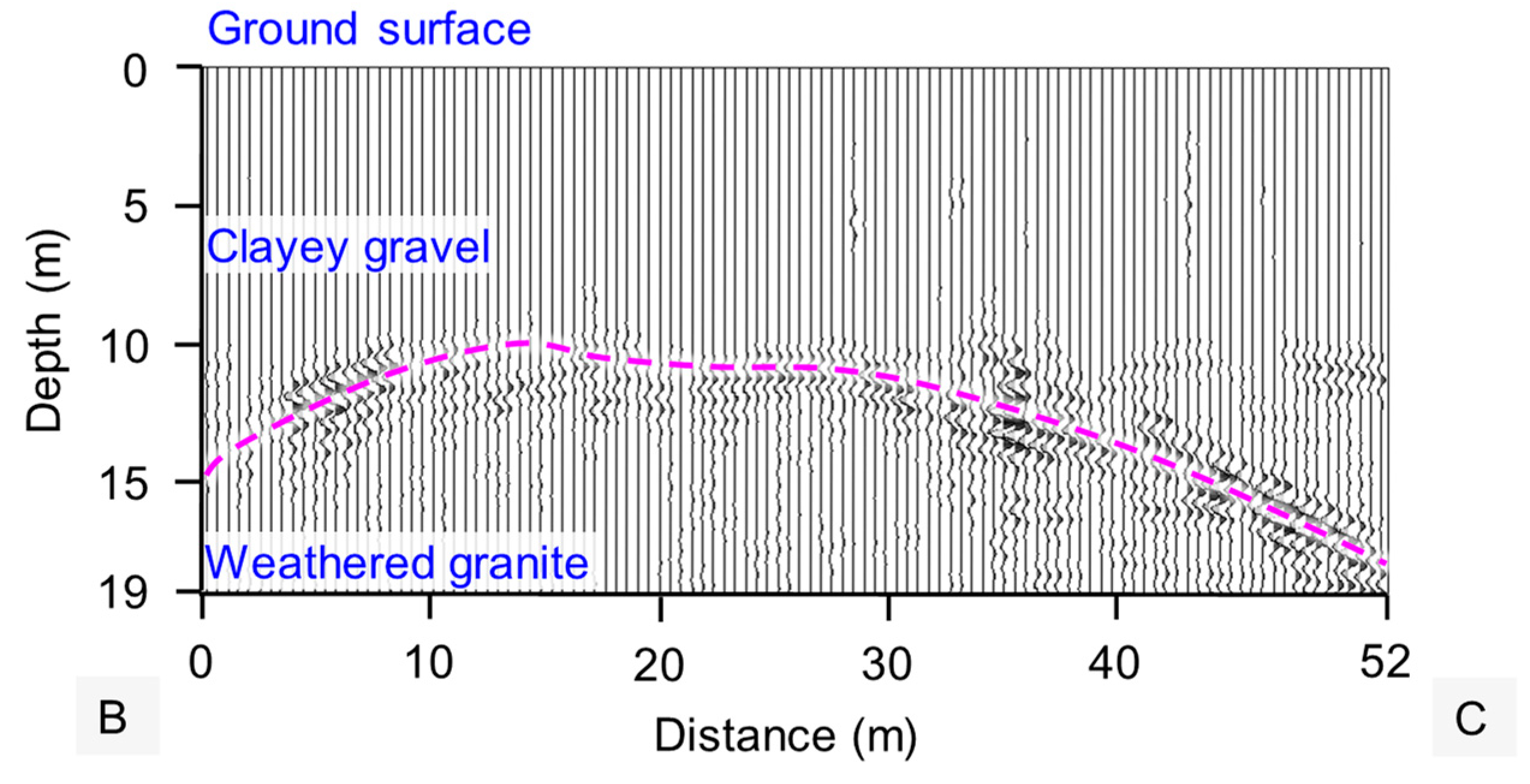
4. Field Study at Tanglang Mountain
5. Conclusions
- The depth of the entire underground strata interface can be continuously obtained using the GPR technique. When interpreting the depth, the in-situ relative permittivity of each soil layer should be used, which can be back-calculated from borehole information and GPR data;
- The interfaces between the soil layers can be accurately identified for the five horizontal stratigraphic interfaces. The absolute and relative errors between the interpreted and measured depths are within [−50, 50] mm and [−5%, 5%], respectively;
- For the V–shaped sand–rock interface, the reflected waves are clear and continuous except for the small area near the intersection of the two interfaces. The ranges of the absolute and relative errors of the interpreted depth are [−107.4, 119.5] mm and [−9.86%, 10.48%], respectively;
- The field study conducted at Tanglang Mountain demonstrated that the GPR technique can effectively and accurately identify continuous subsurface strata of slopes with high efficiency, thereby paving the way for a more robust and dependable site investigation approach for complex slopes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bao, Y.; Wang, H.; Su, L.; Geng, D.; Yang, L.; Shao, P.; Li, Y.; Du, N. Comprehensive analysis using multiple-integrated techniques on the failure mechanism and dynamic process of a long run-out landslide: Jichang landslide case. Nat. Hazards 2022, 112, 2197–2215. [Google Scholar] [CrossRef]
- Hussain, Y.; Schlögel, R.; Innocenti, A.; Hamza, O.; Iannucci, R.; Martino, S.; Havenith, H.B. Review on the geophysical and UAV-Based methods applied to landslides. Remote Sens. 2022, 14, 4564. [Google Scholar] [CrossRef]
- Tandon, R.S.; Gupta, V.; Venkateshwarlu, B.; Joshi, P. An assessment of Dungale landslide using remotely piloted aircraft system (RPAS), ground penetration radar (GPR), and Slide & RS2 Softwares. Nat. Hazards 2022, 113, 1017–1042. [Google Scholar] [CrossRef]
- Yang, D.D.; Qiu, H.J.; Zhu, Y.R.; Liu, Z.J.; Pei, Y.Q.; Ma, S.Y.; Du, C.; Sun, H.S.; Liu, Y.; Cao, M.M. Landslide characteristics and evolution: What we can learn from three adjacent landslides. Remote Sens. 2021, 13, 4579. [Google Scholar] [CrossRef]
- Shi, C.; Wang, Y. Smart determination of borehole number and locations for stability analysis of multi-layered slopes using multiple point statistics and information entropy. Can. Geotech. J. 2021, 58, 1669–1689. [Google Scholar] [CrossRef]
- Yang, R.; Huang, J.; Griffiths, D.V. Optimal geotechnical site investigations for slope reliability assessment considering measurement errors. Eng. Geol. 2022, 297, 106497. [Google Scholar] [CrossRef]
- Chen, J.; Vissinga, M.; Shen, Y.; Hu, S.; Beal, E.; Newlin, J. Machine learning–based digital integration of geotechnical and ultrahigh–frequency geophysical data for offshore site characterizations. J. Geotech. Geoenviron. Eng. 2021, 147, 04021160. [Google Scholar] [CrossRef]
- Pupatenko, V.V.; Sukhobok, Y.A.; Stoyanovich, G.M. Lithological profiling of rocky slopes using GeoReader software based on the results of ground penetrating radar method. Procedia Eng. 2017, 189, 643–649. [Google Scholar] [CrossRef]
- Annan, A.; Cosway, S. Ground penetrating radar survey design. In Proceedings of the 5th EEGS Symposium on the Application of Geophysics to Engineering and Environmental Problems, Oakbrook, IL, USA, 26–29 April 1992; pp. 329–351. [Google Scholar]
- Benedetto, A.; Pajewski, L. Civil engineering applications of ground penetrating radar. In Springer Transactions in Civil and Environmental Engineering; Springer: Cham, Switzerland, 2015; pp. 239–300. [Google Scholar]
- Yuan, W.X.; Liu, S.X.; Zhao, Q.C.; Deng, L.; Lu, Q.; Pan, L.; Li, Z.L. Application of Ground-Penetrating Radar with the Logging Data Constraint in the Detection of Fractured Rock Mass in Dazu Rock Carvings, Chongqing, China. Remote Sens. 2023, 15, 18. [Google Scholar] [CrossRef]
- Innocenti, A.; Rosi, A.; Tofani, V.; Pazzi, V.; Gargini, E.; Masi, E.B.; Segoni, S.; Bertolo, D.; Paganone, M.; Casagli, N. Geophysical Surveys for Geotechnical Model Reconstruction and Slope Stability Modelling. Remote Sens. 2023, 15, 27. [Google Scholar] [CrossRef]
- Chen, D.H.; Wimsatt, A. Inspection and condition assessment using ground penetrating radar. J. Geotech. Geoenviron. Eng. 2010, 136, 207–214. [Google Scholar] [CrossRef]
- Yang, C.-H.; Wang, T.-B.; Liu, H.-C. Application of BGPR logging: Two case studies. J. Geotech. Geoenviron. Eng. 2010, 136, 755–758. [Google Scholar] [CrossRef]
- Gamal, M.; Di, Q.Y.; Zhang, J.H.; Fu, C.M.; Ebrahim, S.; El-Raouf, A.A. Utilizing Ground-Penetrating Radar for Water Leak Detection and Pipe Material Characterization in Environmental Studies: A Case Study. Remote Sens. 2023, 15, 24. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, Q.F.; Gu, X.Y. Assessment of Pavement Structural Conditions and Remaining Life Combining Accelerated Pavement Testing and Ground-Penetrating Radar. Remote Sens. 2023, 15, 21. [Google Scholar] [CrossRef]
- Bichler, A.; Bobrowsky, P.; Best, M.; Douma, M.; Hunter, J.; Calvert, T.; Burns, R. Three-dimensional mapping of a landslide using a multi-geophysical approach: The Quesnel Forks landslide. Landslides 2004, 1, 29–40. [Google Scholar] [CrossRef]
- Qian, R.; Liu, L. Internal structure of sand dunes in the Badain Jaran desert revealed by GPR. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 159–166. [Google Scholar] [CrossRef]
- Kannaujiya, S.; Chattoraj, S.L.; Jayalath, D.; Champati ray, P.K.; Bajaj, K.; Podali, S.; Bisht, M.P.S. Integration of satellite remote sensing and geophysical techniques (electrical resistivity tomography and ground penetrating radar) for landslide characterization at Kunjethi (Kalimath), Garhwal Himalaya, India. Nat. Hazards 2019, 97, 1191–1208. [Google Scholar] [CrossRef]
- Sass, O.; Bell, R.; Glade, T. Comparison of GPR, 2D-resistivity and traditional techniques for the subsurface exploration of the Öschingen landslide, Swabian Alb (Germany). Geomorphology 2008, 93, 89–103. [Google Scholar] [CrossRef]
- Xie, P.; Wen, H.; Xiao, P.; Zhang, Y. Evaluation of ground-penetrating radar (GPR) and geology survey for slope stability study in mantled karst region. Environ. Earth Sci. 2018, 77, 122. [Google Scholar] [CrossRef]
- Sauvin, G.; Lecomte, I.; Bazin, S.; Hansen, L.; Vanneste, M.; L’Heureux, J.-S. On the integrated use of geophysics for quick-clay mapping: The Hvittingfoss case study, Norway. J. Appl. Geophys. 2014, 106, 1–13. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008; pp. 5–40. [Google Scholar]
- Rasimeng, S.; Mandang, I. Identification of eroded sediment layer thickness and depth of Mahakam River at Tenggarong Bridge Area, Kutai Kartanegara East Kalimantan using Ground Penetrating Radar Method. Proc. IOP Conf. Ser. Earth Environ. Sci. 2019, 279, 012040. [Google Scholar] [CrossRef]
- Anbazhagan, P.; Bittelli, M.; Pallepati, R.R.; Mahajan, P. Comparison of soil water content estimation equations using ground penetrating radar. J. Hydrol. 2020, 588, 125039. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Bianchini Ciampoli, L.; Calvi, A.; Brancadoro, M.G.; Alani, A.M. Railway ballast condition assessment using ground-penetrating radar—An experimental, numerical simulation and modelling development. Constr. Build. Mater. 2017, 140, 508–520. [Google Scholar] [CrossRef]
- Ling, T.; He, W.; Zhang, S.; Liu, X.; Huang, F.; Liu, W. A new method for measuring the relative dielectric constant of porous mixed media using GPR, and its application. Constr. Build. Mater. 2022, 353, 129042. [Google Scholar] [CrossRef]
- Rasol, M.A.; Pérez-Gracia, V.; Fernandes, F.M.; Pais, J.C.; Solla, M.; Santos, C. NDT assessment of rigid pavement damages with ground penetrating radar: Laboratory and field tests. Int. J. Pavement Eng. 2020, 23, 900–915. [Google Scholar] [CrossRef]
- Ling, D.; Zhao, Y.; Wang, Y.; Huang, B. Study on relationship between dielectric constant and water content of rock-soil mixture by time domain reflectometry. J. Sens. 2016, 2016, 2827890. [Google Scholar] [CrossRef]
- Thring, L.M.; Boddice, D.; Metje, N.; Curioni, G.; Chapman, D.N.; Pring, L. Factors affecting soil permittivity and proposals to obtain gravimetric water content from time domain reflectometry measurements. Can. Geotech. J. 2014, 51, 1303–1317. [Google Scholar] [CrossRef]
- Artagan, S.S.; Borecky, V. Advances in the nondestructive condition assessment of railway ballast: A focus on GPR. NDT E Int. 2020, 115, 102290. [Google Scholar] [CrossRef]
- Davis, J.L.; Annan, A.P. Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Born, M.; Wolf, E. Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light; Elsevier: Amsterdam, The Netherlands, 2013; pp. 130–197. [Google Scholar]
- Xue, Y.J.; Wang, Q.C.; Ma, L.A.; Yu, Y.Y.; Zhang, R.L. Calculation model of heaving amount on embankments using multi-factor coupling of low swell potential mudstone as foundation for high-speed railways. Transp. Geotech. 2023, 38, 16. [Google Scholar] [CrossRef]
- Liu, X.X.; Chen, X.G.; Wang, L.; Zhang, F.P.; Zhang, X.; Wang, Y. Investigation on the scour properties of pile under the current considering the geomechanical parameters of seabed: Time scale. Ocean Eng. 2022, 262, 13. [Google Scholar] [CrossRef]
- Napa-García, G.F.; Beck, A.T.; Celestino, T.B. Reliability analyses of underground openings with the point estimate method. Tunn. Undergr. Space Technol. 2017, 64, 154–163. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Range of Relative Permittivity |
|---|---|
| Dry sand | 3–5 |
| Wet sand | 20–30 |
| Limestone | 4–8 |
| Clay | 5–40 |
| Granite | 4–6 |
| Dry salt | 5–6 |
| Shale | 5–15 |
| Silt | 5–30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Zhang, W.; Li, J.; Liu, D.; Zhang, L. Identification of Complex Slope Subsurface Strata Using Ground-Penetrating Radar. Remote Sens. 2024, 16, 415. https://doi.org/10.3390/rs16020415
Wang T, Zhang W, Li J, Liu D, Zhang L. Identification of Complex Slope Subsurface Strata Using Ground-Penetrating Radar. Remote Sensing. 2024; 16(2):415. https://doi.org/10.3390/rs16020415
Chicago/Turabian StyleWang, Tiancheng, Wensheng Zhang, Jinhui Li, Da Liu, and Limin Zhang. 2024. "Identification of Complex Slope Subsurface Strata Using Ground-Penetrating Radar" Remote Sensing 16, no. 2: 415. https://doi.org/10.3390/rs16020415
APA StyleWang, T., Zhang, W., Li, J., Liu, D., & Zhang, L. (2024). Identification of Complex Slope Subsurface Strata Using Ground-Penetrating Radar. Remote Sensing, 16(2), 415. https://doi.org/10.3390/rs16020415