
A Multi-Dimensional Feature Fusion Recognition Method for Space Infrared Dim Targets Based on Fuzzy Comprehensive with Spatio-Temporal Correlation


Abstract
1. Introduction
2. Preliminaries
2.1. Multi-Dimensional Features of Space Targets under Space-Based IR Observation
2.2. Space Target IR Simulation Model
2.3. Fuzzy Comprehensive Function
- (a)
- Order preservation. For exists
- (b)
- Comprehensive. For exists
3. Proposed Method
3.1. Establishment of Fuzzy-Membership Function and Calculation
3.2. EWM to Determine Fusion Weight
3.3. Spatio-Temporal Fusion Judgment
3.3.1. Spatio-Domain Feature Fusion
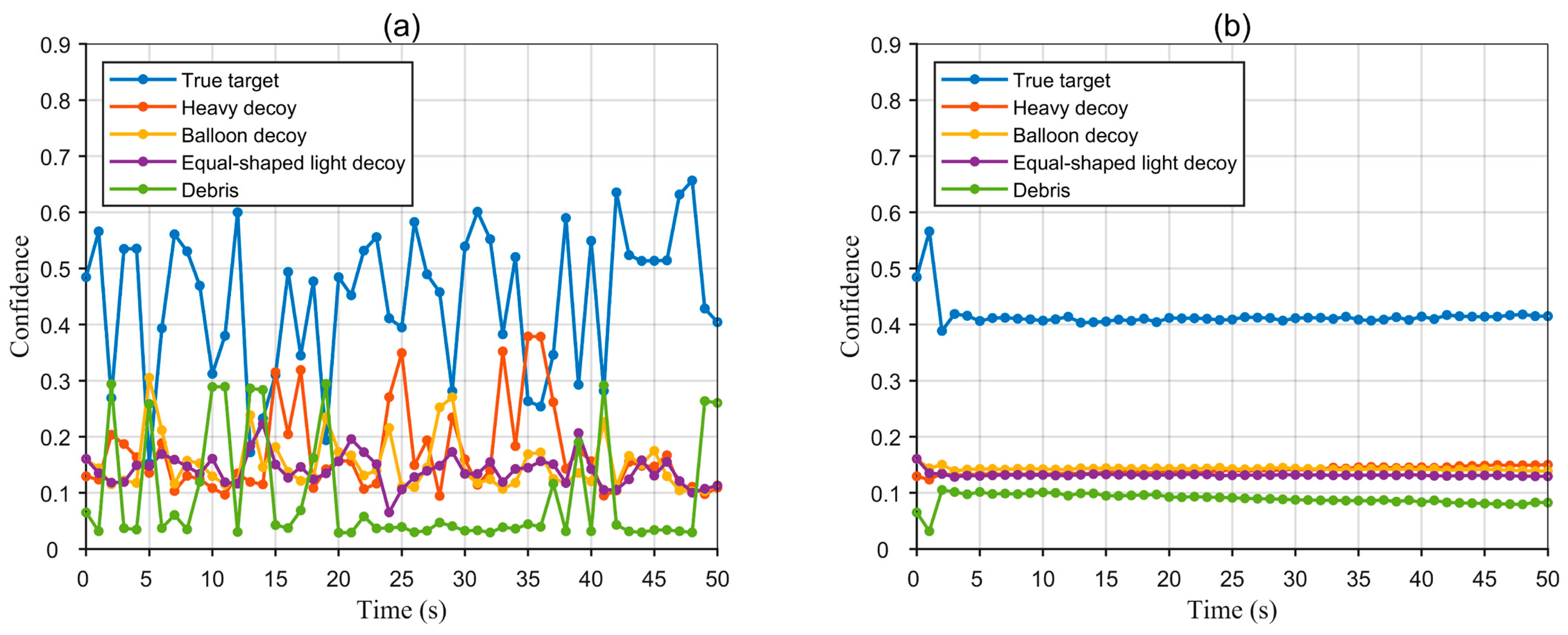
3.3.2. Temporal-Domain Recursive Fusion
3.3.3. Final Judgment
3.4. Expert Identification and Updates
4. Experiments
4.1. Simulation Experiment
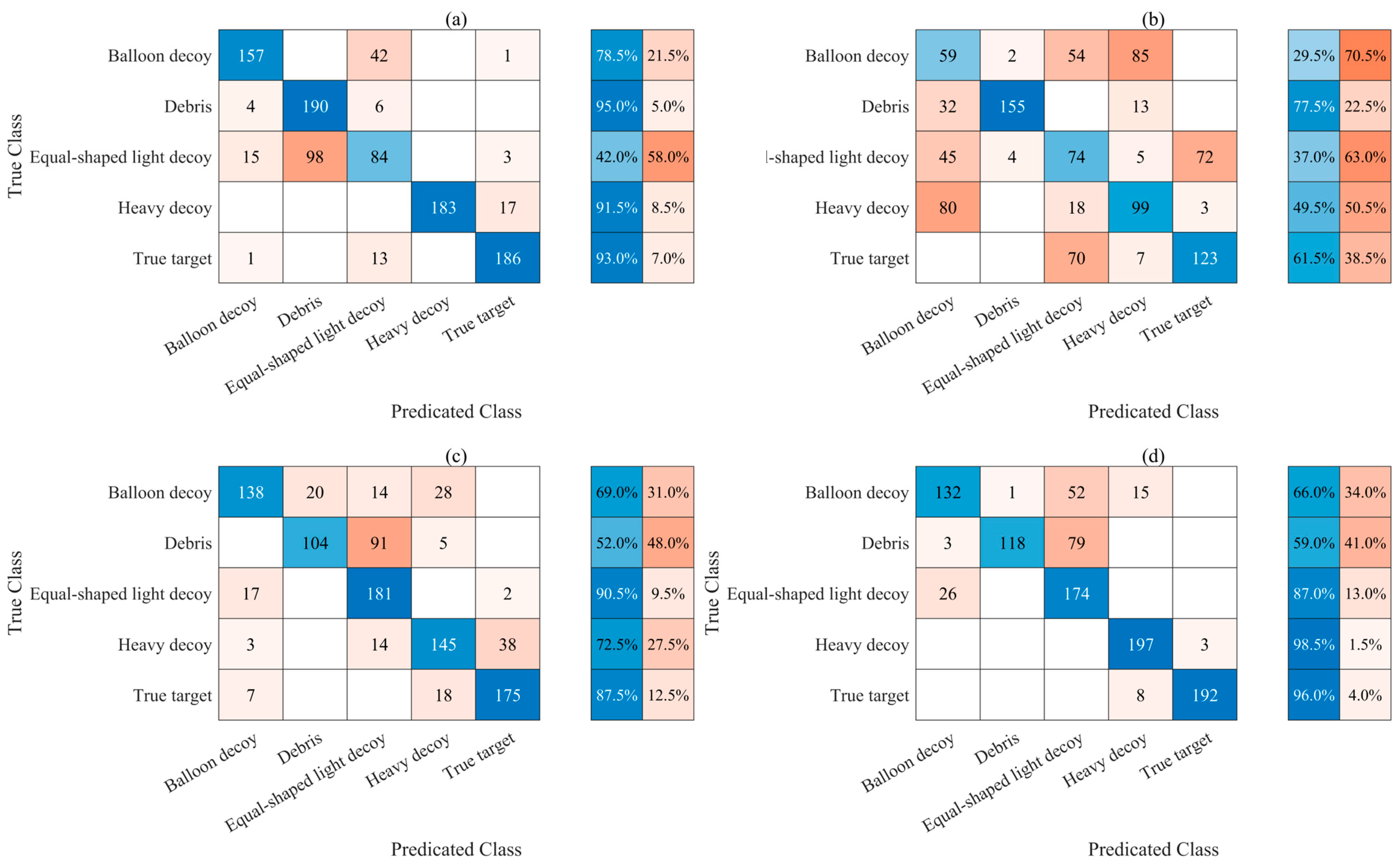
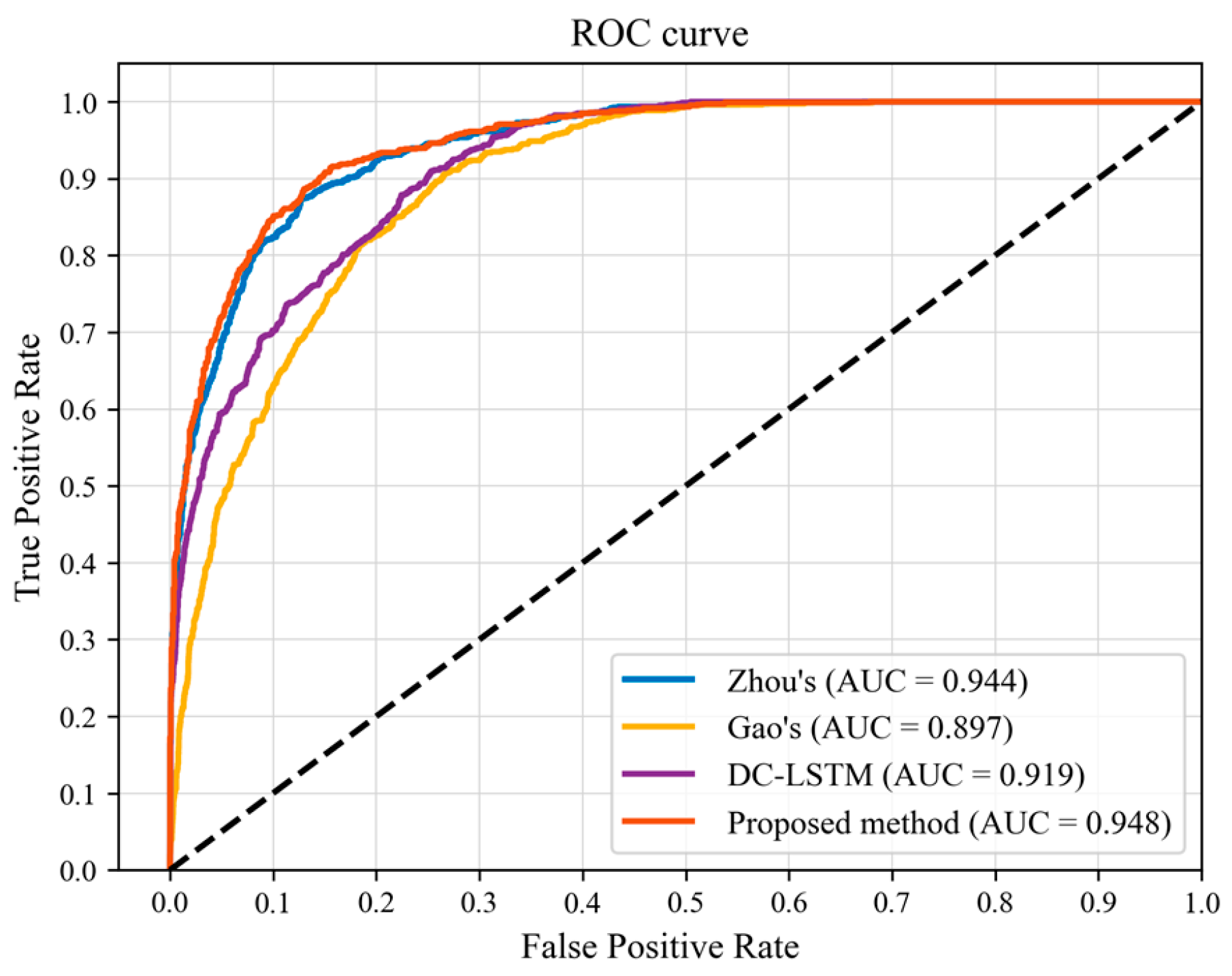
4.2. Comparison Experiment
4.3. Analysis of Influencing Factors
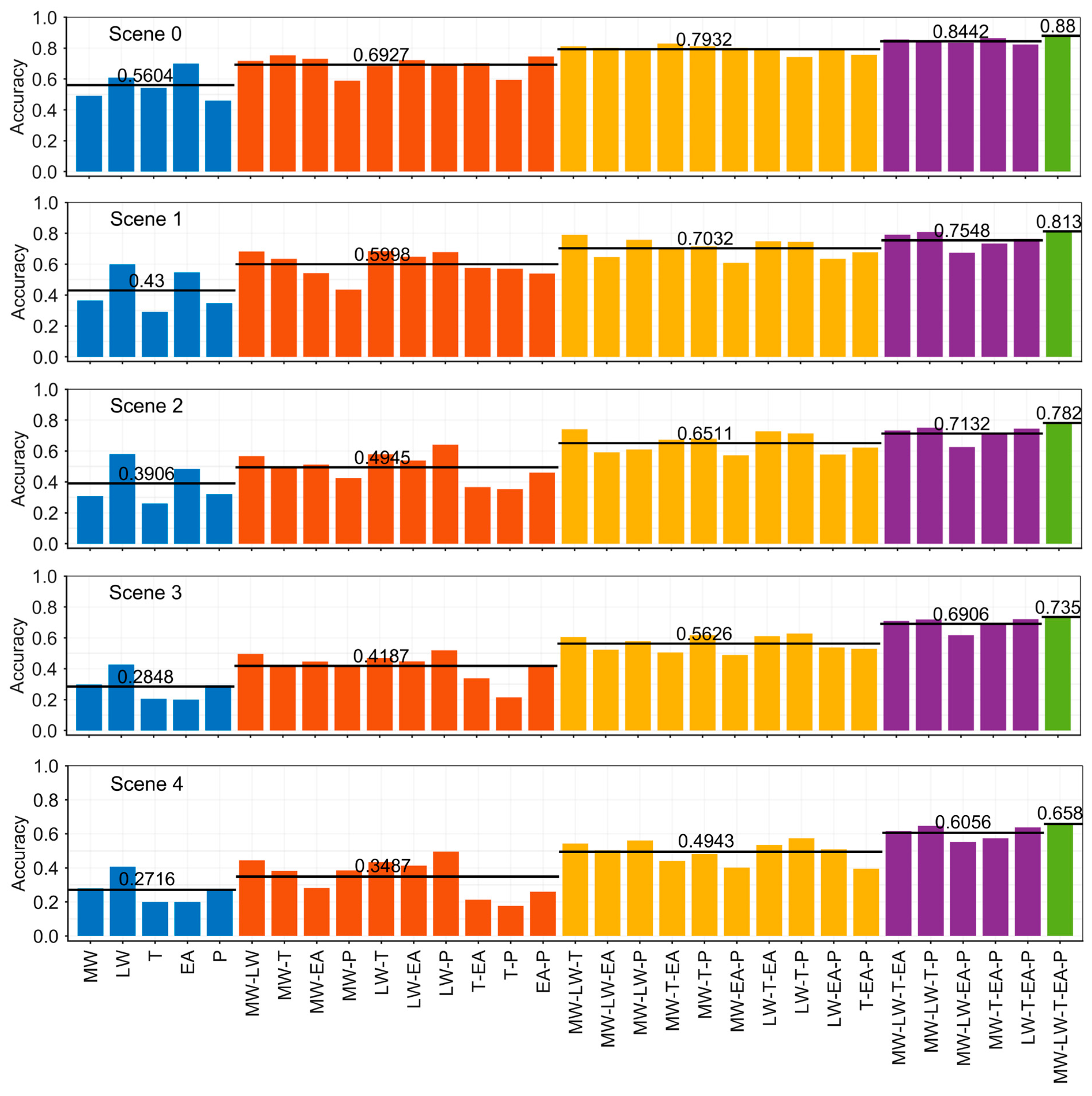
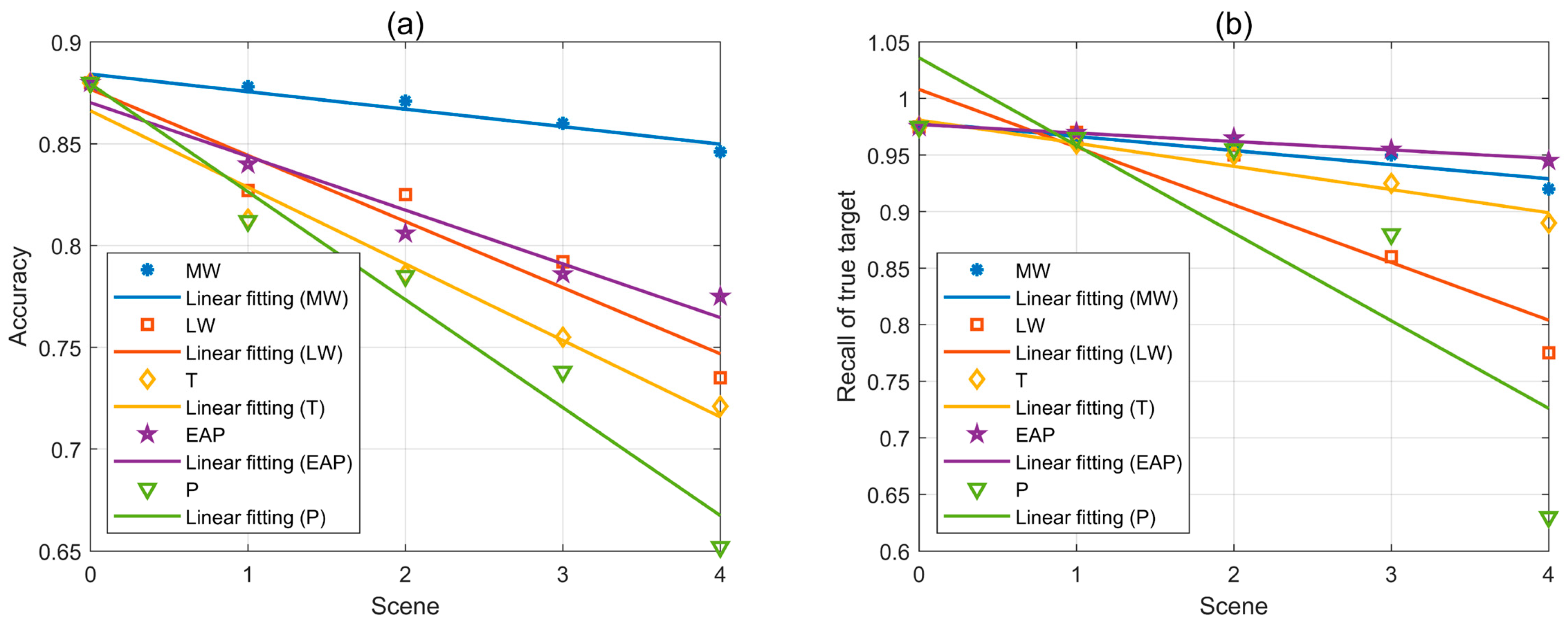
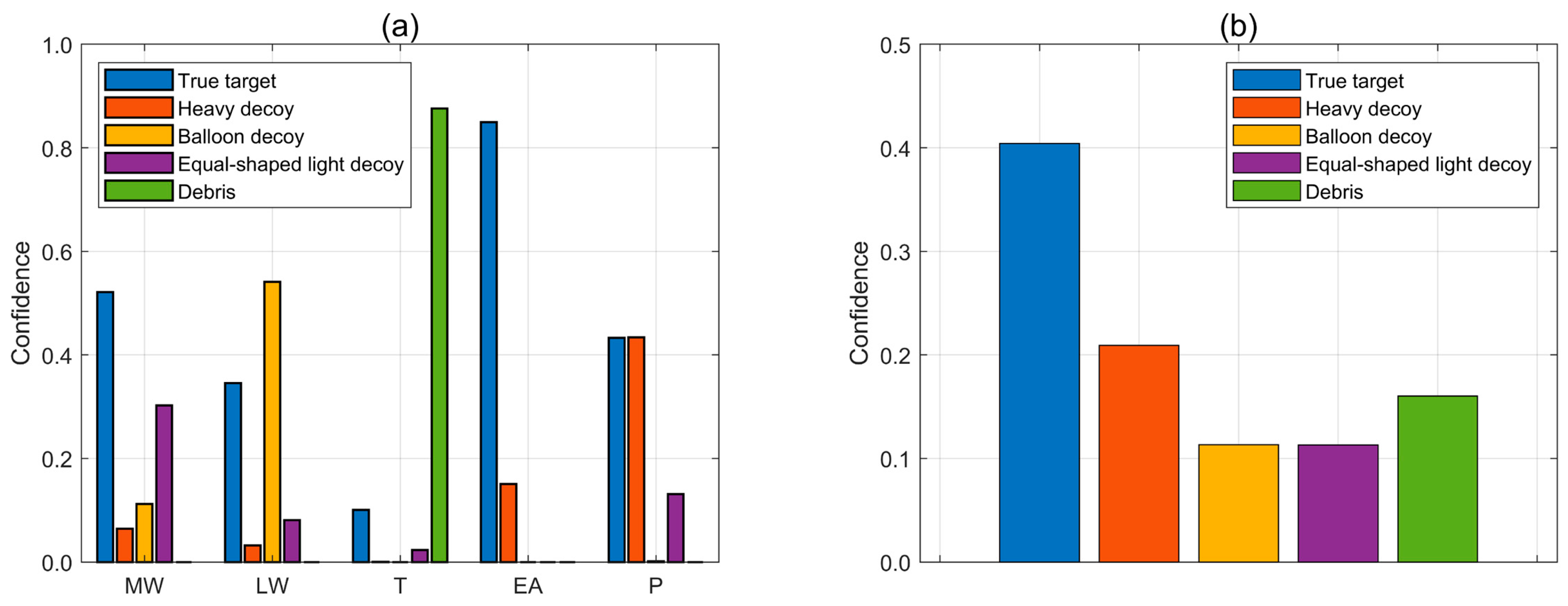
4.3.1. Analysis of Fused Feature Combinations
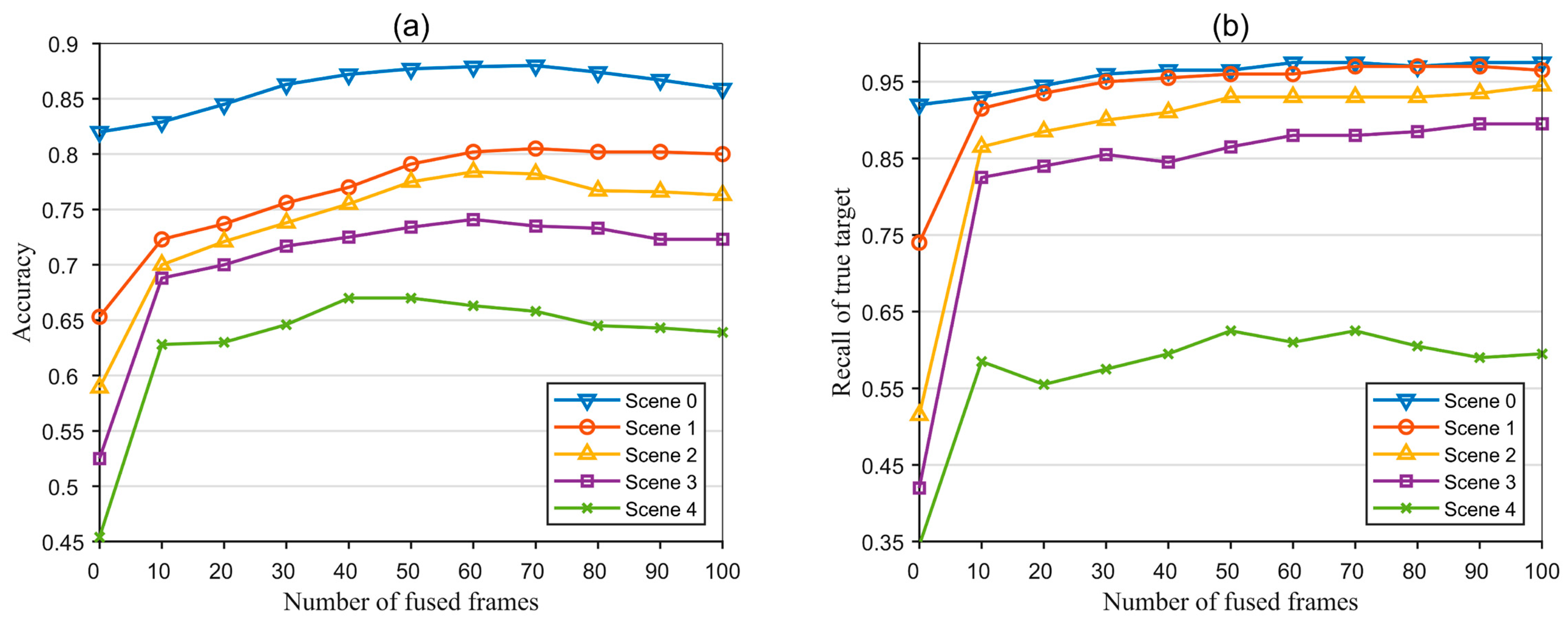
4.3.2. Analysis of Fused Frame Counts
4.3.3. Analysis of Feature Extraction Errors
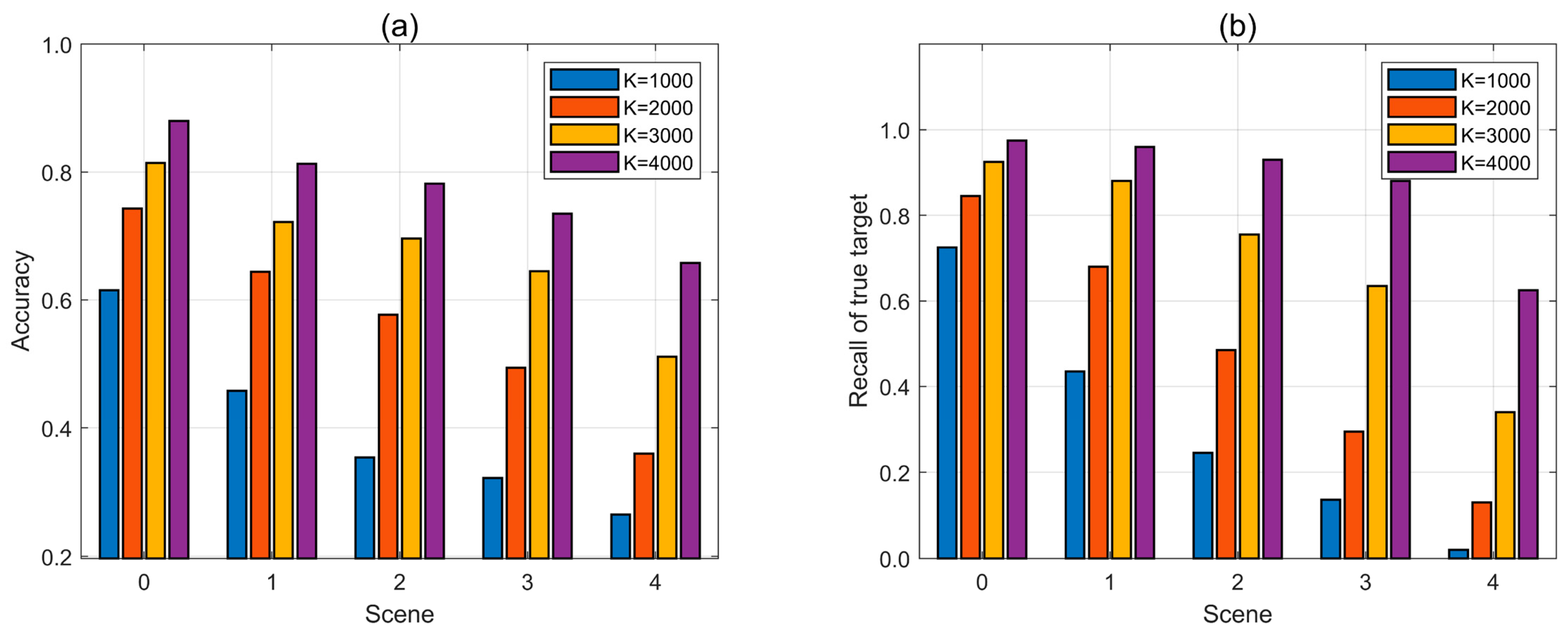
4.3.4. Analysis of Feature Database Size
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dai, H.; Zhou, Y.; Huang, S.; Yin, X. Target recognition of ballistic middle segment based on infrared multiple features. J. Command Control 2019, 5, 302–307. [Google Scholar]
- Kang, H.; Huang, S.; Ling, Q.; Wu, J.; Zhong, Y. A detection method based on spectrum characteristics of missile plume using SVDD algorithm. Infrared Technol. 2015, 37, 696–700. [Google Scholar]
- Silberman, G.L. Parametric classification techniques for theater ballistic missile defense. Johns Hopkins APL Tech. Dig. 1998, 19, 322–339. [Google Scholar]
- Li, W.; Liu, Z.; Mu, Y.; Yang, R.; Zhang, X. Modeling and research of a space-based spacecraft infrared detection system. Appl. Opt. 2017, 56, 2428–2433. [Google Scholar] [CrossRef]
- Liu, J. Research on Features Extraction and Recognition Based on Infrared Signatures of Space Targets; National University of Defense Technology: Changsha, China, 2017. [Google Scholar]
- Gu, M.; Ren, Q.; Zhou, J.; Liao, S. Analysis and identification of infrared radiation characteristics of different attitude targets. Appl. Opt. 2021, 60, 109–118. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Yao, S.; Mao, H.; Dai, C.; Wei, H. A model of faint target temperature estimation based on dual-band infrared. Procedia Comput. Sci. 2019, 147, 151–157. [Google Scholar]
- Zhang, H.; Rao, P.; Chen, X.; Xia, H.; Zhang, S. Denoising and Feature Extraction for Space Infrared Dim Target Recognition Utilizing Optimal VMD and Dual-Band Thermometry. Machines 2022, 10, 168. [Google Scholar] [CrossRef]
- Wu, Y.; Lu, H.; Liu, J.; Zhao, F. Shape and micromotion parameters estimation of exoatmosphere object from the infrared signature. Opt. Eng. 2017, 56, 033103. [Google Scholar] [CrossRef]
- Li, K.; Dai, X.; Luo, Y.; Zhang, Q. Review of Radar Micro-Motion Feature Extraction and Recognition for Ballistic Targets. J. Air Force Eng. Univ. 2023, 24, 7–17. [Google Scholar]
- Zhang, S.; Rao, P.; Zhang, H.; Chen, X. Velocity Estimation for Space Infrared Dim Targets Based on Multi-Satellite Observation and Robust Locally Weighted Regression. Remote Sens. 2023, 15, 2767. [Google Scholar] [CrossRef]
- Kamlaskar, C.; Deshmukh, S.; Gosavi, S.; Abhyankar, A. Novel canonical correlation analysis based feature level fusion algorithm for multimodal recognition in biometric sensor systems. Sens. Lett. 2019, 17, 75–86. [Google Scholar] [CrossRef]
- Han, M.; Zhang, H. Multiple kernel learning for label relation and class imbalance in multi-label learning. Inf. Sci. 2022, 613, 344–356. [Google Scholar] [CrossRef]
- Li, J.; Yang, X.; Zhou, L. Multi-Sensor Target Recognition Based-on Multi-Period Improved DS Evidence Fusion Method. J. Nanoelectron. Optoelectron. 2018, 13, 758–767. [Google Scholar]
- Li, S.; Yang, K.; Ma, J.; Tian, X.; Yang, X. Anti-interference recognition method of aerial infrared targets based on the Bayesian network. J. Opt. 2021, 50, 264–277. [Google Scholar] [CrossRef]
- Shakya, A.; Biswas, M.; Pal, M. CNN-based fusion and classification of SAR and Optical data. Int. J. Remote Sens. 2020, 41, 8839–8861. [Google Scholar] [CrossRef]
- Zhang, S.; Rao, P.; Zhang, H.; Chen, X.; Hu, T. Spatial Infrared Objects Discrimination based on Multi-Channel CNN with Attention Mechanism. Infrared Phys. Technol. 2023, 132, 104670. [Google Scholar] [CrossRef]
- Wu, D.; Cao, L.; Zhou, P.; Li, N.; Li, Y.; Wang, D. Infrared Small-Target Detection Based on Radiation Characteristics with a Multimodal Feature Fusion Network. Remote Sens. 2022, 14, 3570. [Google Scholar] [CrossRef]
- Zuo, Z.; Tong, X.; Wei, J.; Su, S.; Wu, P.; Guo, R.; Sun, B. AFFPN: Attention Fusion Feature Pyramid Network for Small Infrared Target Detection. Remote Sens. 2022, 14, 3412. [Google Scholar] [CrossRef]
- Wang, X.; Lu, R.; Bi, H.; Li, Y. An Infrared Small Target Detection Method Based on Attention Mechanism. Sensors 2023, 23, 8608. [Google Scholar] [CrossRef]
- Zhang, K.; Dai, J. A novel TOPSIS method with decision-theoretic rough fuzzy sets. Inf. Sci. 2022, 608, 1221–1244. [Google Scholar] [CrossRef]
- Al-shami, T.M.; Mhemdi, A. Generalized Frame for Orthopair Fuzzy Sets: (m,n)-Fuzzy Sets and Their Applications to Multi-Criteria Decision-Making Methods. Information 2023, 14, 56. [Google Scholar] [CrossRef]
- Sharma, P.; Alshehri, M.; Sharma, R. Activities tracking by smartphone and smartwatch biometric sensors using fuzzy set theory. Multimed. Tools Appl. 2023, 82, 2277–2302. [Google Scholar] [CrossRef]
- Li, Z.; Zhong, Z.; Cao, X.; Hou, B.; Li, L. Robustness analysis of shield tunnels in non-uniformly settled strata based on fuzzy set theory. Comput. Geotech. 2023, 162, 105670. [Google Scholar] [CrossRef]
- Wan, T.; Cheng, F.; Cheng, Y.; Liao, C.; Bai, Y. Investigation into effect of non-uniform thermal environment on thermal sensation under stratum ventilation for heating by using interpolation-based multi-level fuzzy comprehensive evaluation. J. Build. Eng. 2023, 64, 105592. [Google Scholar] [CrossRef]
- Yao, Y.; Cheng, L.; Chen, S.; Chen, H.; Chen, M.; Li, N.; Li, Z.; Dongye, S.; Gu, Y.; Yi, J. Study on Road Network Vulnerability Considering the Risk of Landslide Geological Disasters in China’s Tibet. Remote Sens. 2023, 15, 4221. [Google Scholar] [CrossRef]
- Lv, J.; Ren, J.; Wang, D. A method of point target identification based on fuzzy set theory. In Proceedings of the Third International Workshop on Advanced Computational Intelligence (IWACI), Suzhou, China, 25–27 August 2010; pp. 277–281. [Google Scholar]
- Yao, D.; Chai, H.; Wang, Z. Target recognition based on stratified synthesis strategy. In 2015 Joint International Mechanical, Electronic and Information Technology Conference (JIMET-15); Atlantis Press: Amsterdam, The Netherlands, 2015; pp. 338–343. [Google Scholar]
- Azimirad, E.; Haddadnia, J. Target threat assessment using fuzzy sets theory. Int. J. Adv. Intell. Inf. 2015, 1, 57–74. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Lu, H.; Chang, Q. Recurrent neural networks for discrimination of exo-atmospheric targets based on infrared radiation signature. Infrared Phys. Technol. 2019, 96, 123–132. [Google Scholar] [CrossRef]
- Lu, X.; Sheng, J. Review of surface temperature of ballistic missile in flight. Infrared 2016, 37, 1–6. [Google Scholar]
- Zhang, H.; Rao, P.; Chen, X.; Xia, H.; Zhang, S. Study on periodic law of micromotion feature for space infrared moving target recognition. In Proceedings of the 5th Optics Young Scientist Summit (OYSS 2022), Fuzhou, China, 16–19 September 2022; pp. 78–93. [Google Scholar]
- Zhang, H.; Rao, P.; Xia, H.; Weng, D.; Chen, X.; Li, Y. Modeling and analysis of infrared radiation dynamic characteristics for space micromotion target recognition. Infrared Phys. Technol. 2021, 116, 103795. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, X.; Rao, P.; Zhang, H. Visualization of radiation intensity sequences for space infrared target recognition. In Proceedings of the Earth and Space: From Infrared to Terahertz (ESIT 2022), Nantong, China, 17–19 September 2022; pp. 546–553. [Google Scholar]
- Huang, H. Research on Techniques of Detection and Recognition of Target in Dual-band Infrared; National University of Defense Technology: Changsha, China, 2013. [Google Scholar]
- Zhu, Y.; Tian, D.; Yan, F. Effectiveness of entropy weight method in decision-making. Math. Probl. Eng. 2020, 2020, 3564835. [Google Scholar] [CrossRef]
- Tan, J.; Zhao, H.; Yang, R.; Liu, H.; Li, S.; Liu, J. An Entropy-Weighting Method for Efficient Power-Line Feature Evaluation and Extraction from LiDAR Point Clouds. Remote Sens. 2021, 13, 3446. [Google Scholar] [CrossRef]
- Zhou, H.; Dong, C.; Wu, R.; Xu, X.; Guo, Z. Feature Fusion Based on Bayesian Decision Theory for Radar Deception Jamming Recognition. IEEE Access 2021, 9, 16296–16304. [Google Scholar] [CrossRef]
- Gao, X.; Pan, L.; Deng, Y. Cross entropy of mass function and its application in similarity measure. Appl. Intell. 2022, 52, 8337–8350. [Google Scholar] [CrossRef]
- Zhao, F.; Zhang, Z.; Hu, M.; Deng, Y.; Shen, X. Exo-atmospheric infrared objects classification based on dual-channel LSTM network. Infrared Phys. Technol. 2020, 111, 103535. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Targets | True Target | Heavy Decoy | Balloon Decoy | Equal-Shaped Light Decoy | Debris |
|---|---|---|---|---|---|
| Shape |  |  |  |  |  |
| Micro-motion mode | Spinning and coning | Spinning and coning | None | Tumbling | Tumbling |
| Micro-motion parameters | |||||
| Coating thickness/mm | 0.01~0.15 | 0.01~0.15 | 0.01~0.1 | 0.01~0.1 | 0.01~0.05 |
| Initial temperature/K | 290~310 | 290~310 | 200~300 | 200~300 | 200~300 |
| Density/ | 3849 | 1950 | 1390 | 900 | 2700 |
| Emissivity | 0.94 | 0.75 | 0.5 | 0.5 | 0.45 |
| Specific capacity/ | 710 | 610 | 1150 | 1950 | 904 |
| IR detector parameters | Wave bands: ; observation time: 50 s; sample frequency: 25 Hz | ||||
| Targets | True Target | Heavy Decoy | Balloon Decoy | Equal-Shaped Light Decoy | Debris |
|---|---|---|---|---|---|
| Recall | 97.5% | 98.0% | 61.0% | 87.0% | 96.5% |
| FAR | 0.5% | 2.6% | 2.9% | 8.5% | 0.5% |
| MAR | 2.5% | 2.0% | 39.0% | 13.0% | 3.5% |
| Accuracy | 88.0% | ||||
| Scene | |||||
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 1 | 10 | 0.1 | 0.1 |
| 2 | 2 | 2 | 20 | 0.2 | 0.2 |
| 3 | 3 | 3 | 30 | 0.3 | 0.3 |
| 4 | 4 | 4 | 40 | 0.4 | 0.4 |
| Scene | Zhou’s [38] | Gao’s [39] | DC-LSTM [40] | Proposed Method | ||||
|---|---|---|---|---|---|---|---|---|
| Recall | Accuracy | Recall | Accuracy | Recall | Accuracy | Recall | Accuracy | |
| 0 | 97.5% | 86.9% | 65.0% | 61.3% | 92.0% | 89.1% | 97.5% | 88.0% |
| 1 | 93.0% | 80.0% | 61.5% | 51.0% | 87.5% | 74.3% | 96.0% | 81.3% |
| 2 | 83.0% | 72.9% | 41.0% | 39.4% | 63.5% | 61.9% | 93.0% | 78.2% |
| 3 | 71.2% | 67.1% | 3.5% | 35.0% | 30.5% | 47.2% | 88.0% | 73.5% |
| 4 | 59.0% | 60.3% | 0 | 34.7% | 28.5% | 37.5% | 62.5% | 65.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Rao, P.; Hu, T.; Chen, X.; Xia, H. A Multi-Dimensional Feature Fusion Recognition Method for Space Infrared Dim Targets Based on Fuzzy Comprehensive with Spatio-Temporal Correlation. Remote Sens. 2024, 16, 343. https://doi.org/10.3390/rs16020343
Zhang S, Rao P, Hu T, Chen X, Xia H. A Multi-Dimensional Feature Fusion Recognition Method for Space Infrared Dim Targets Based on Fuzzy Comprehensive with Spatio-Temporal Correlation. Remote Sensing. 2024; 16(2):343. https://doi.org/10.3390/rs16020343
Chicago/Turabian StyleZhang, Shenghao, Peng Rao, Tingliang Hu, Xin Chen, and Hui Xia. 2024. "A Multi-Dimensional Feature Fusion Recognition Method for Space Infrared Dim Targets Based on Fuzzy Comprehensive with Spatio-Temporal Correlation" Remote Sensing 16, no. 2: 343. https://doi.org/10.3390/rs16020343
APA StyleZhang, S., Rao, P., Hu, T., Chen, X., & Xia, H. (2024). A Multi-Dimensional Feature Fusion Recognition Method for Space Infrared Dim Targets Based on Fuzzy Comprehensive with Spatio-Temporal Correlation. Remote Sensing, 16(2), 343. https://doi.org/10.3390/rs16020343