
Tracking-by-Detection Algorithm for Underwater Target Based on Improved Multi-Kernel Correlation Filter


Abstract
1. Introduction
2. Model Establishment
2.1. Target Model
2.2. Measurement Model
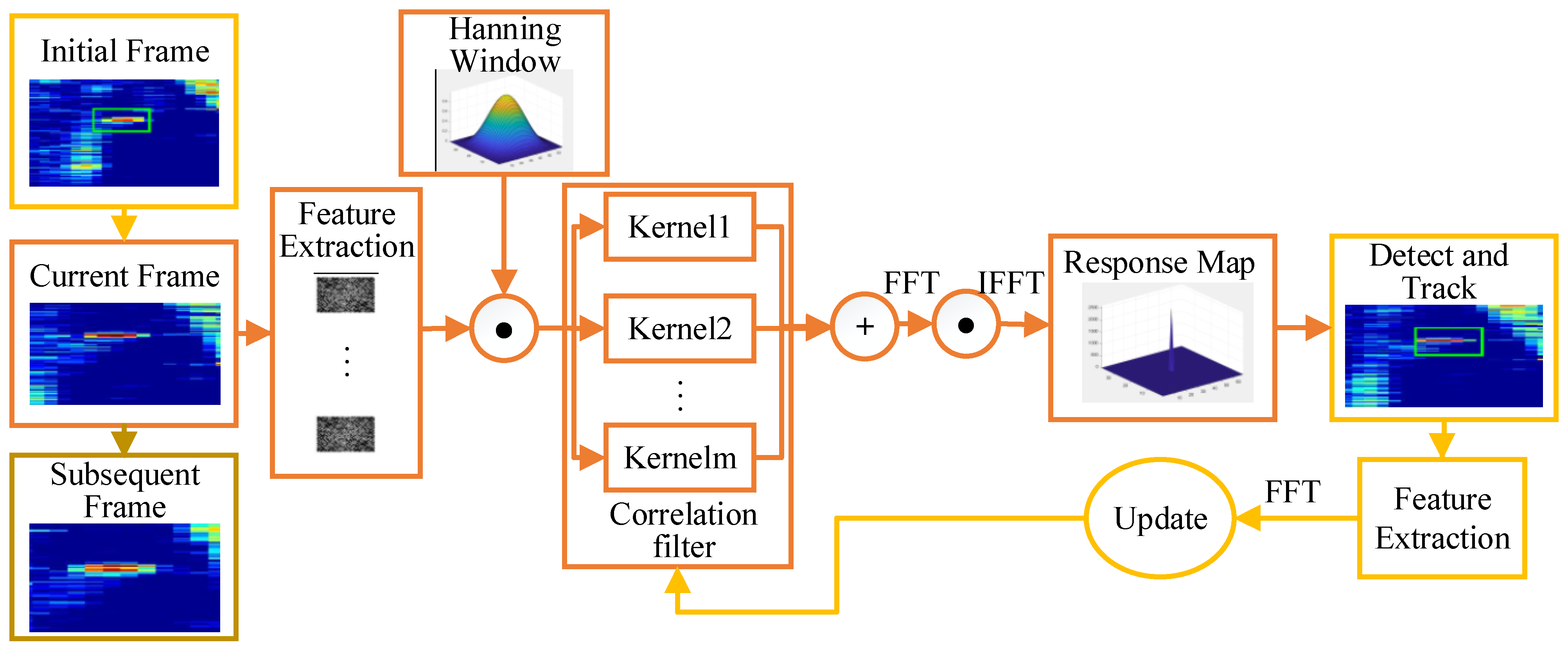
3. Preliminaries of the KCF Algorithm
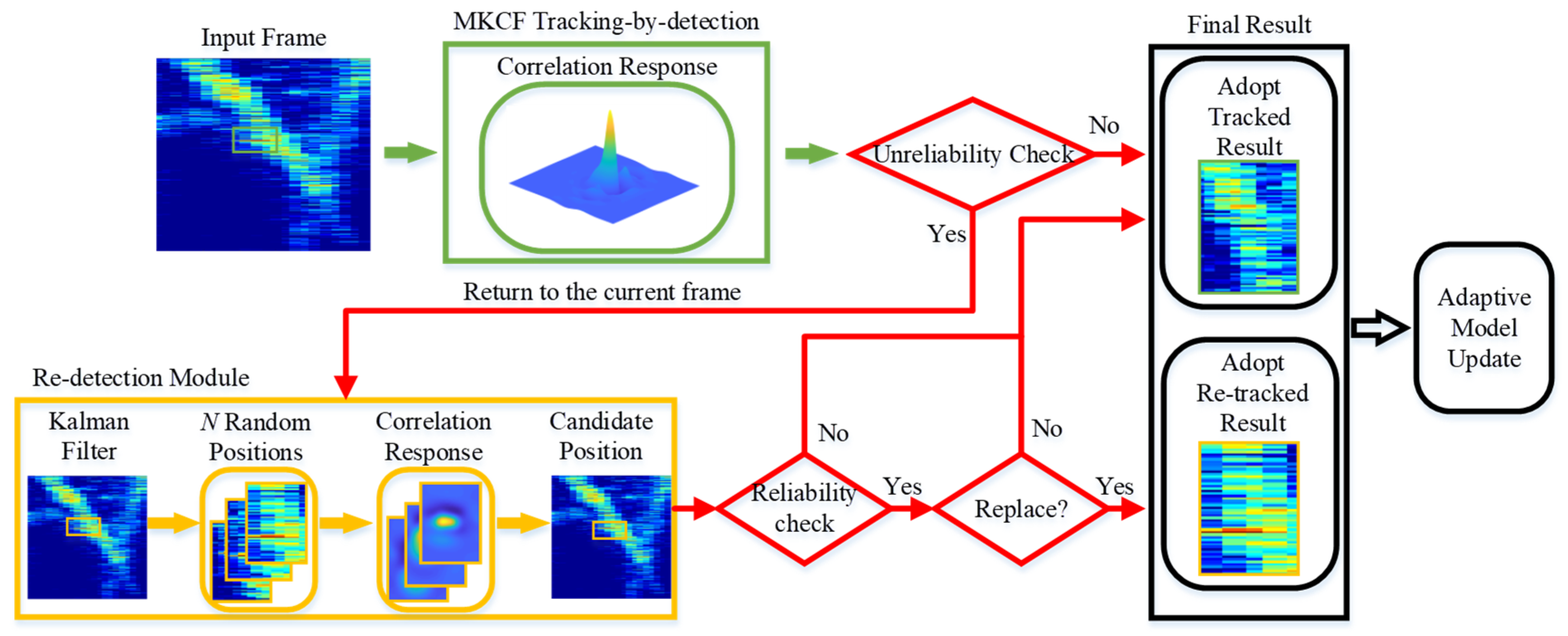
4. Improved MKCF Tracking-by-Detection
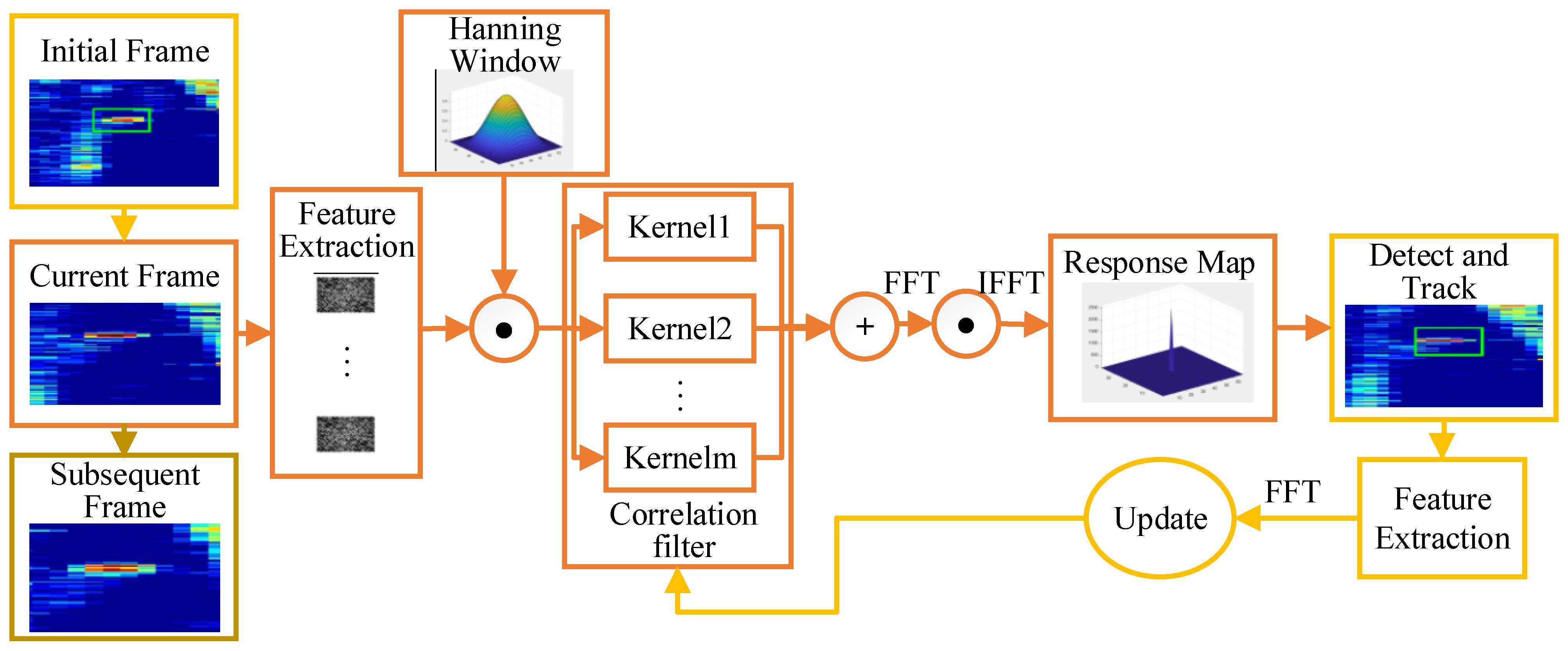
4.1. The MKCF Tracking-by-Detection
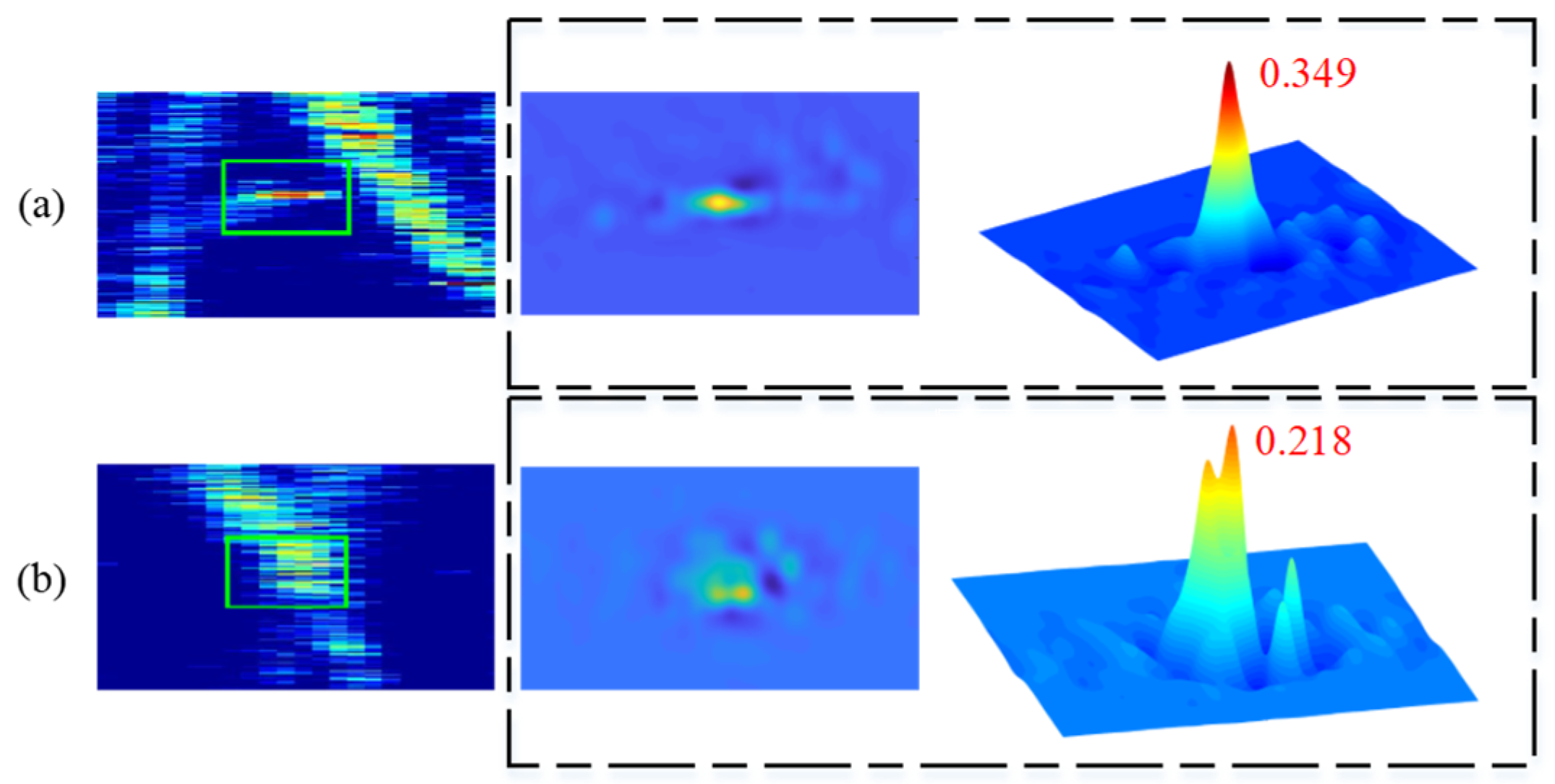
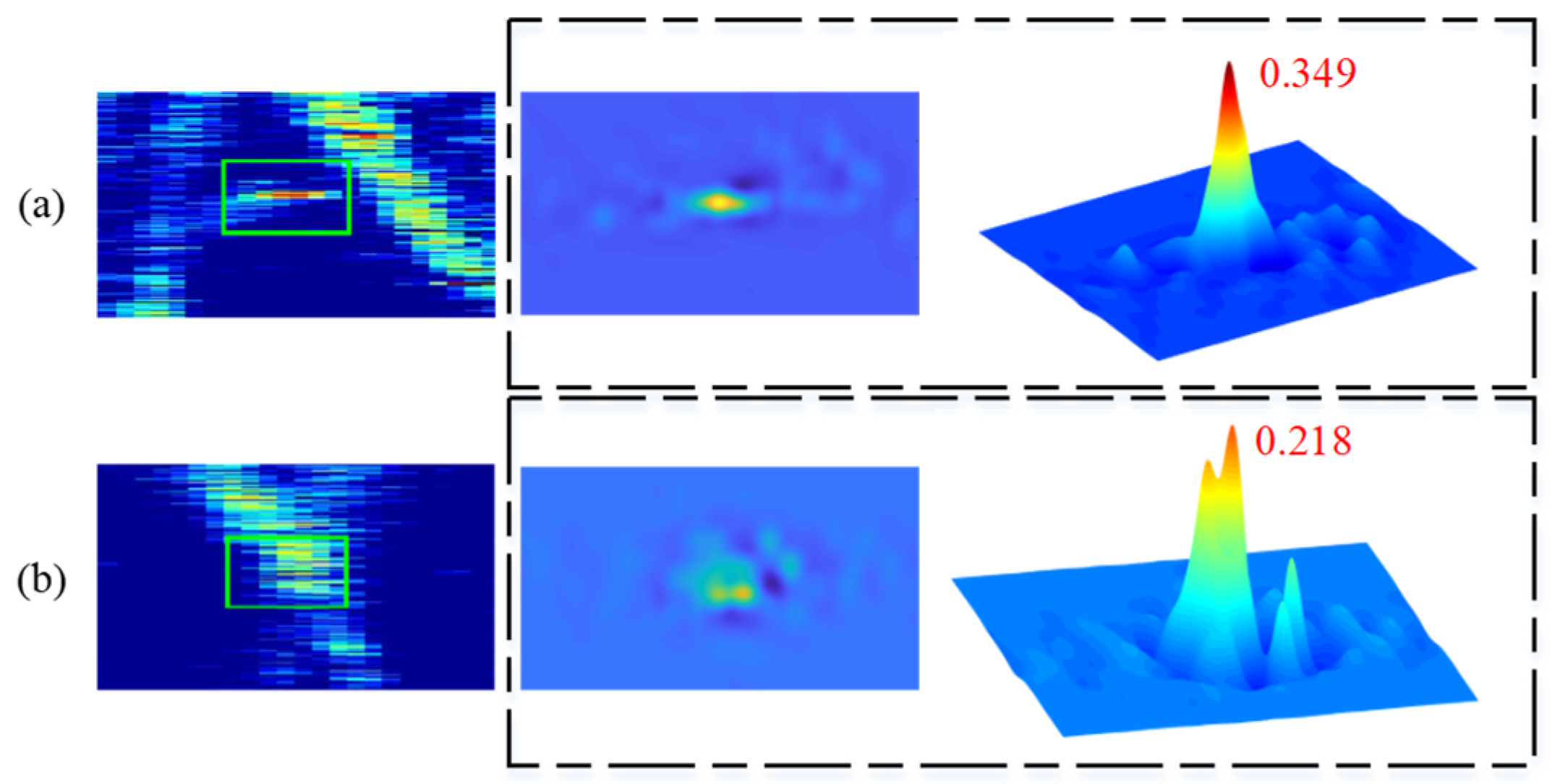
4.2. The Adaptive Reliability Check
4.3. The Re-Detection Module
5. Experimental Results
5.1. Evaluation Metrics
5.2. Test Scenarios and Parameter Settings
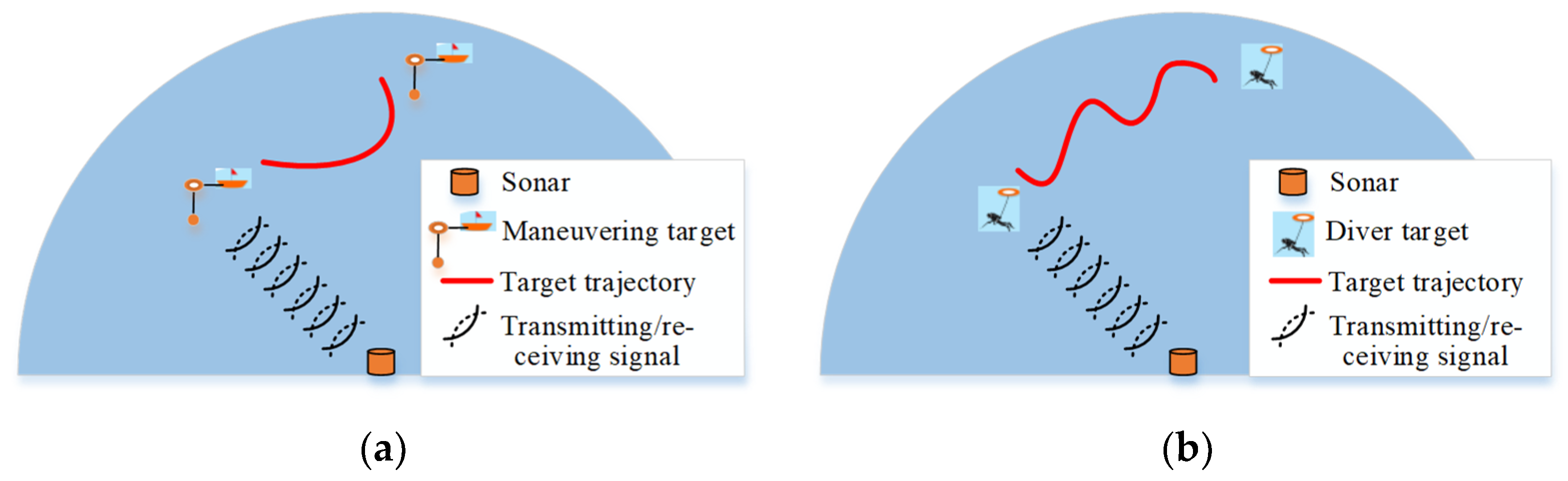
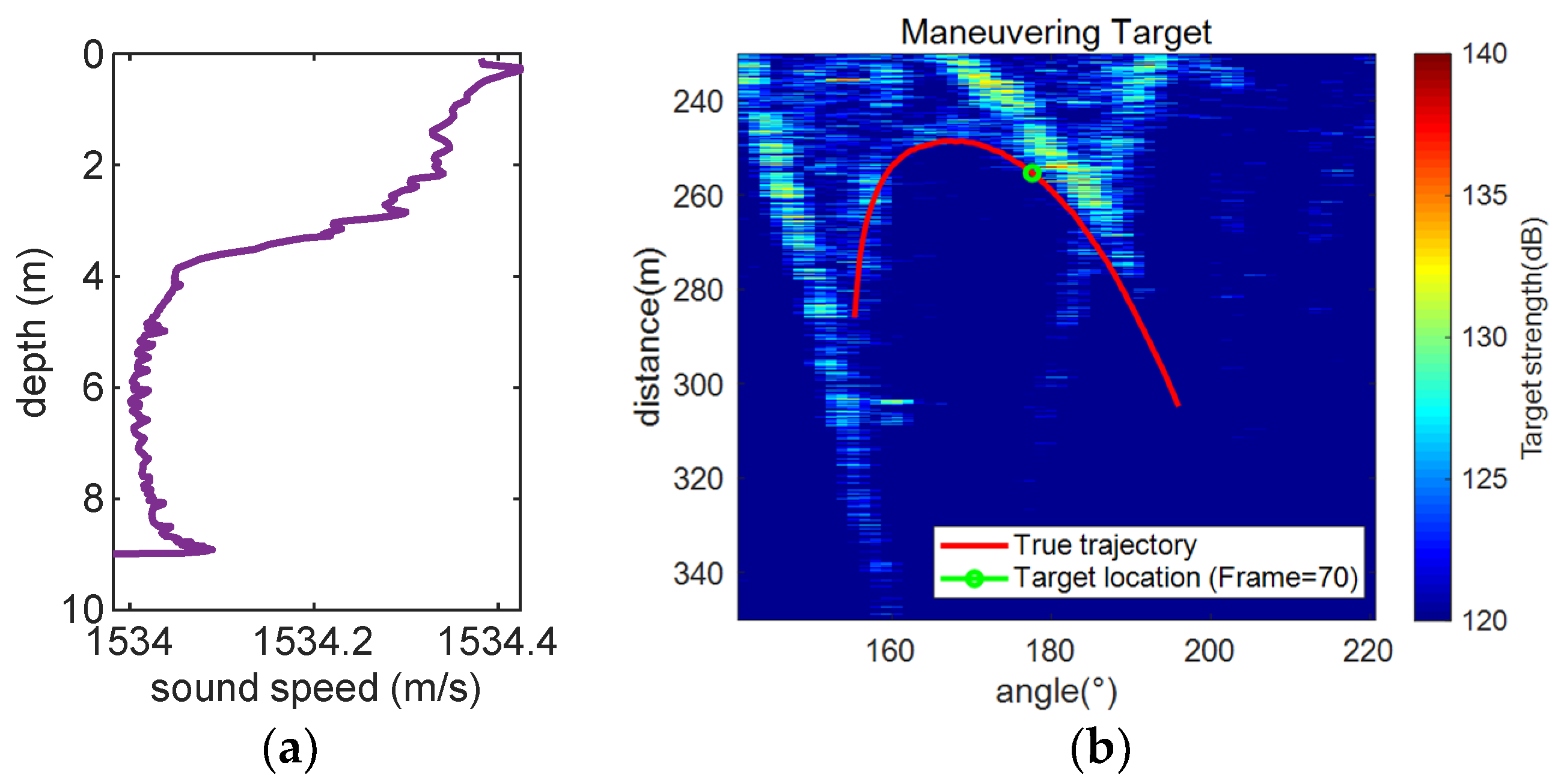
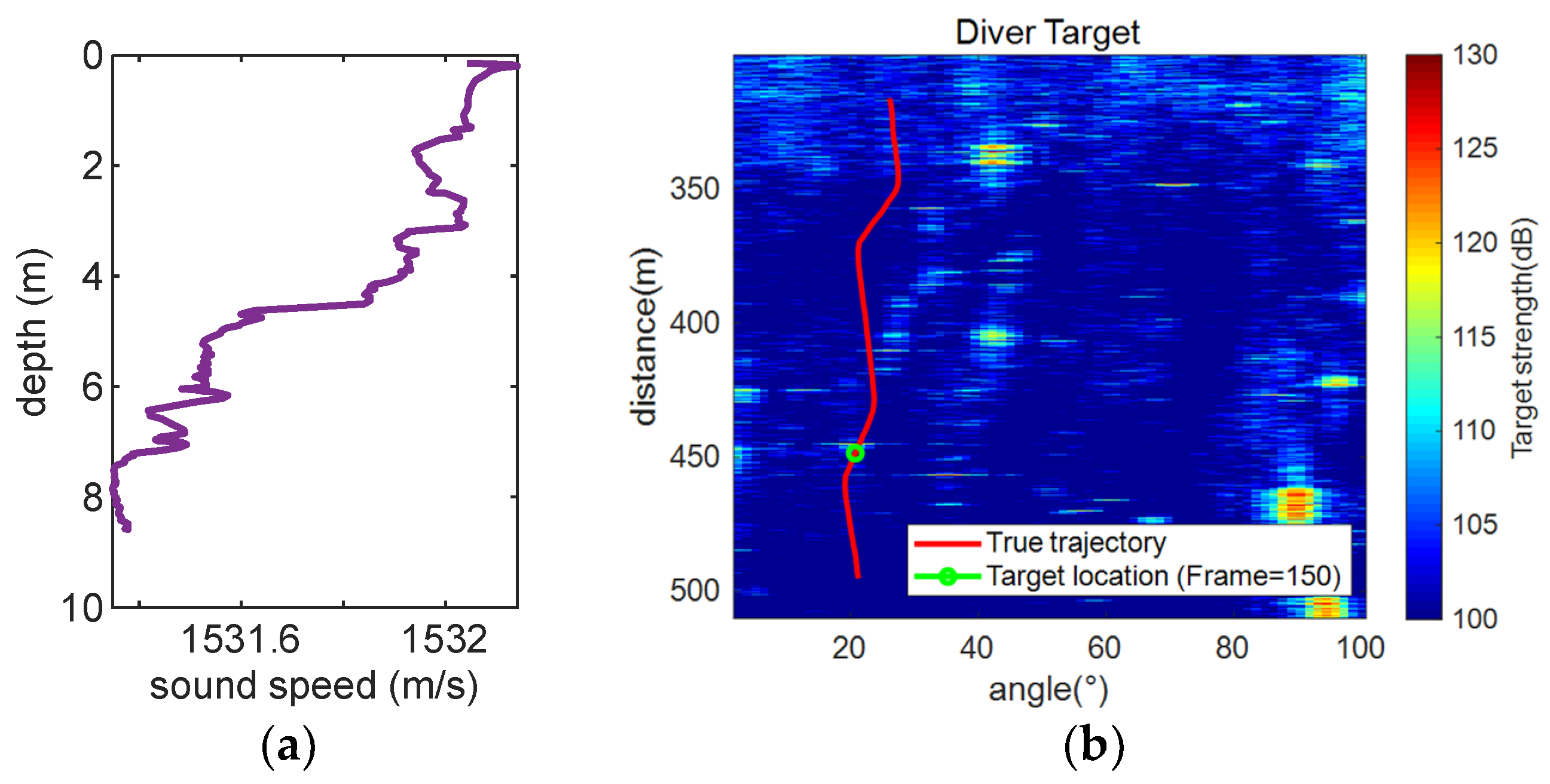
5.2.1. Test Scenarios
5.2.2. Parameter Settings
5.3. Data Processing and Analysis
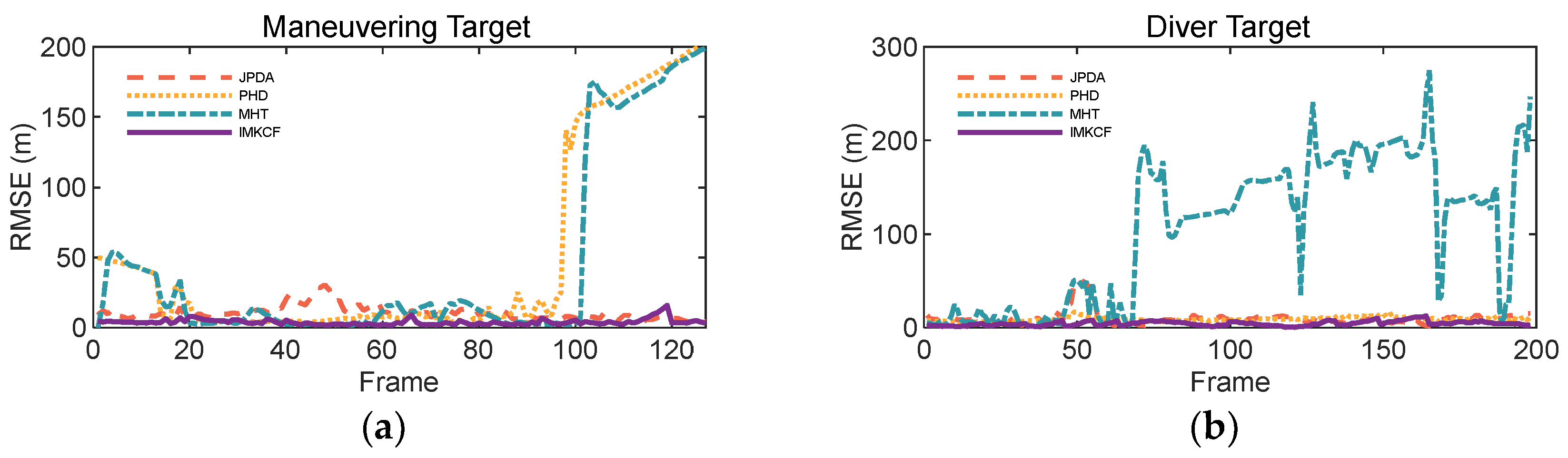
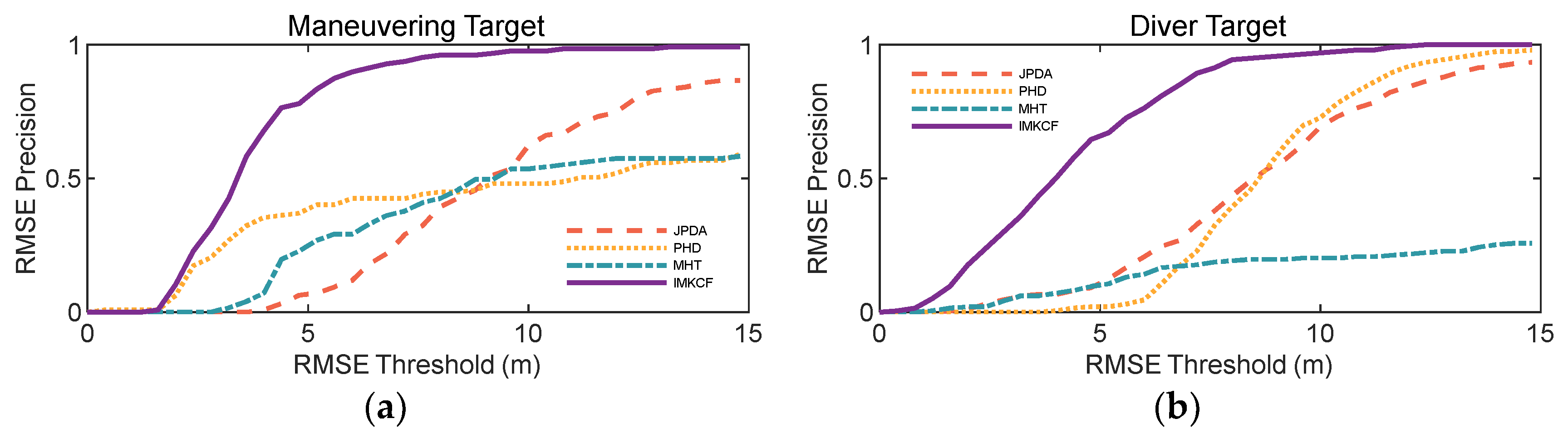
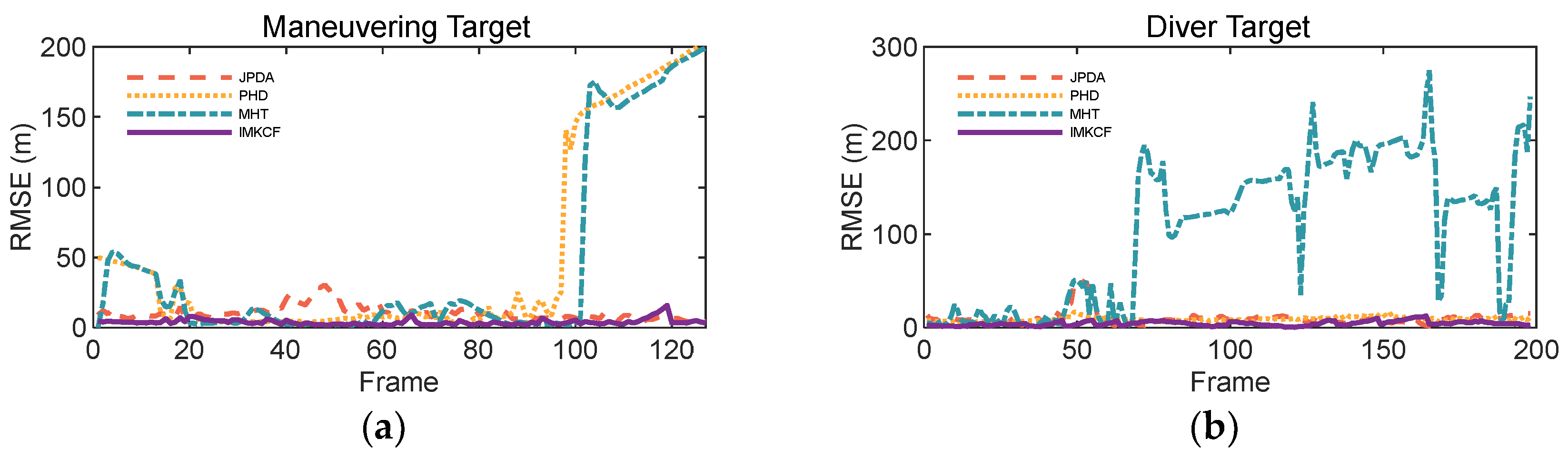
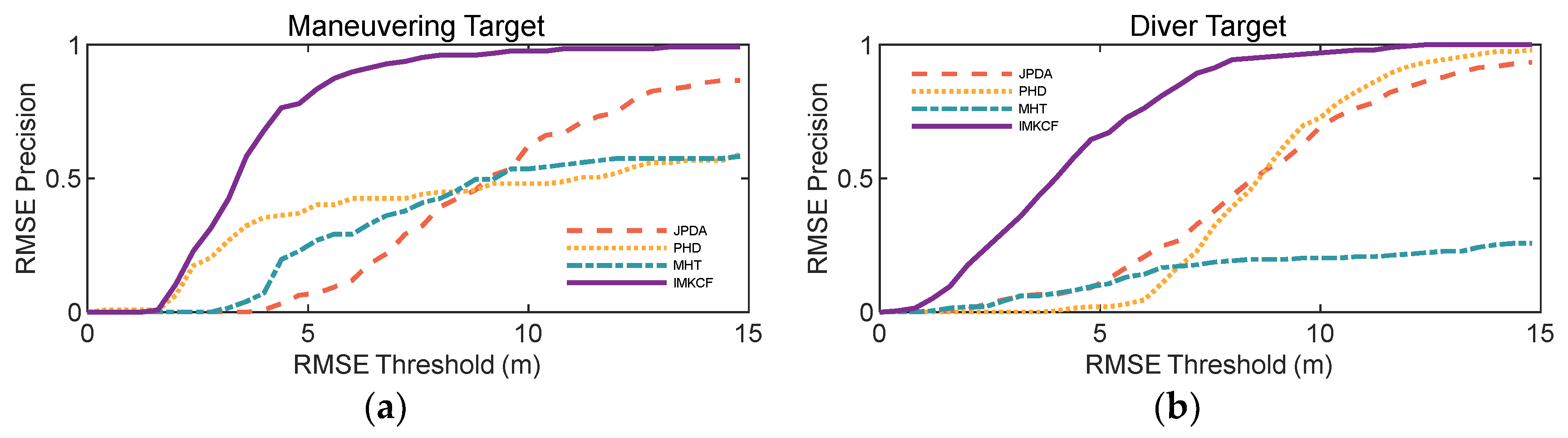
5.3.1. Comparison with Traditional Tracking Algorithms
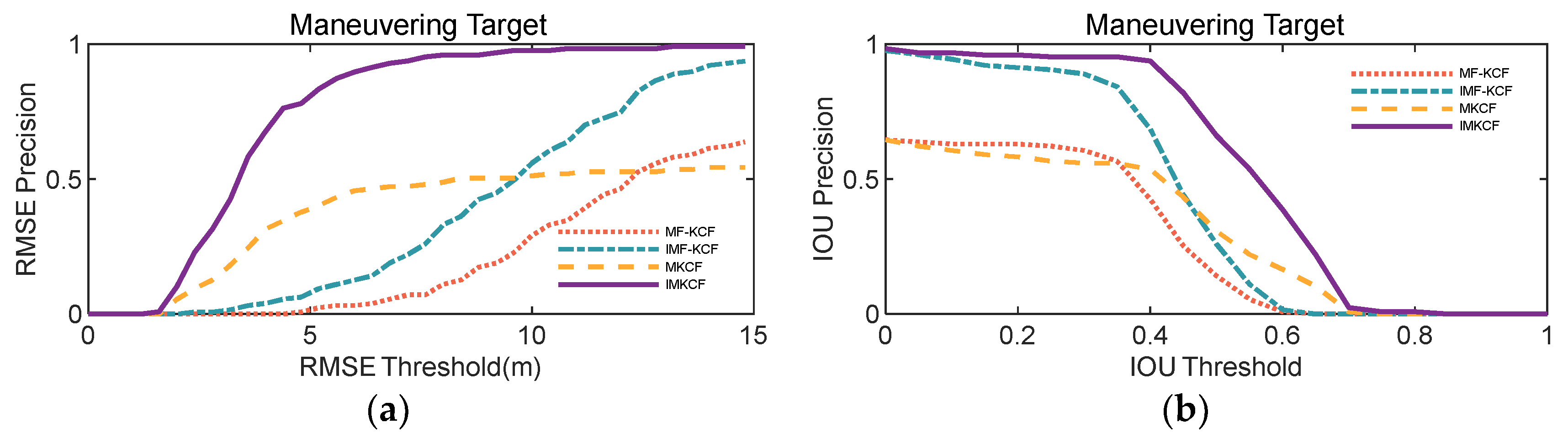
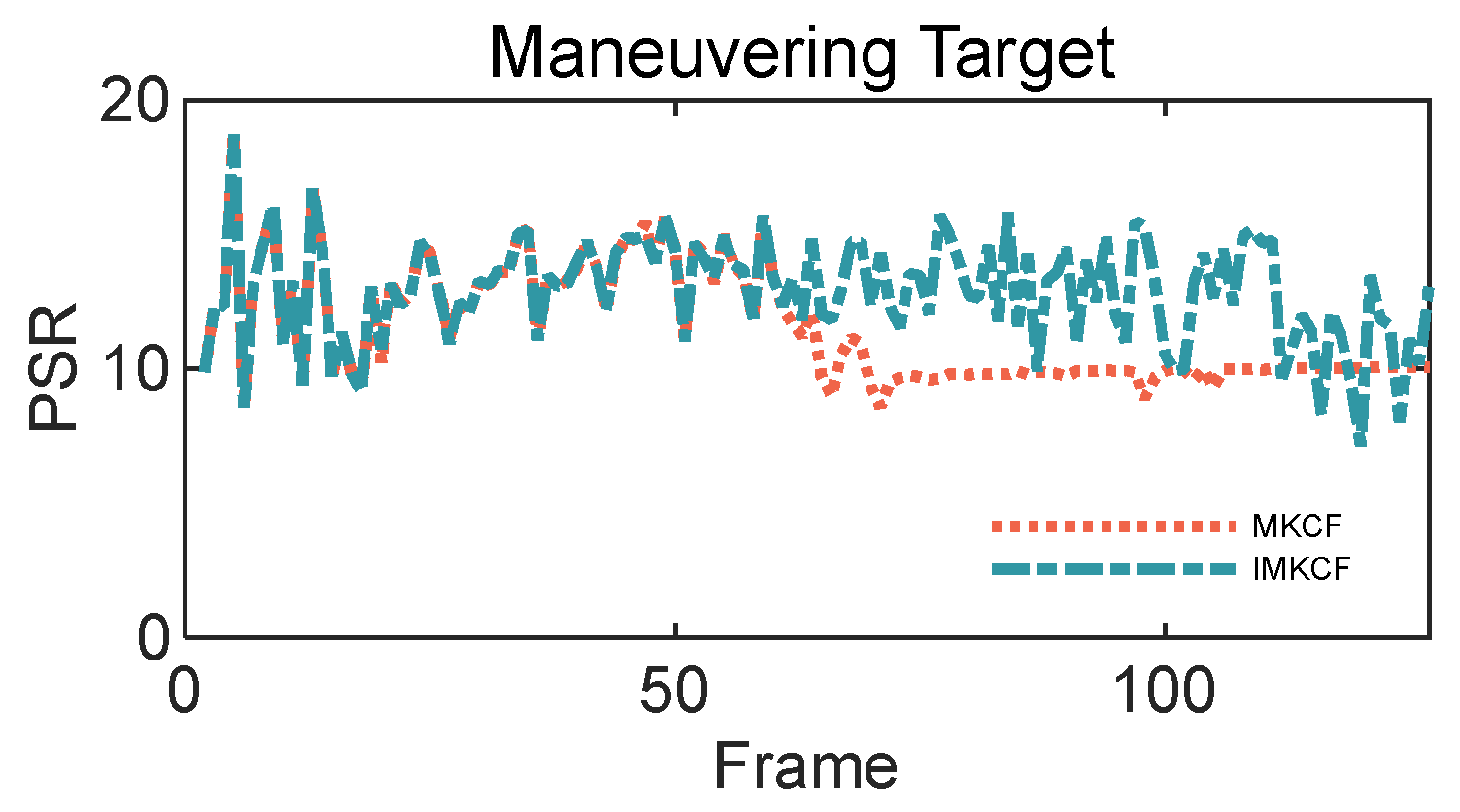
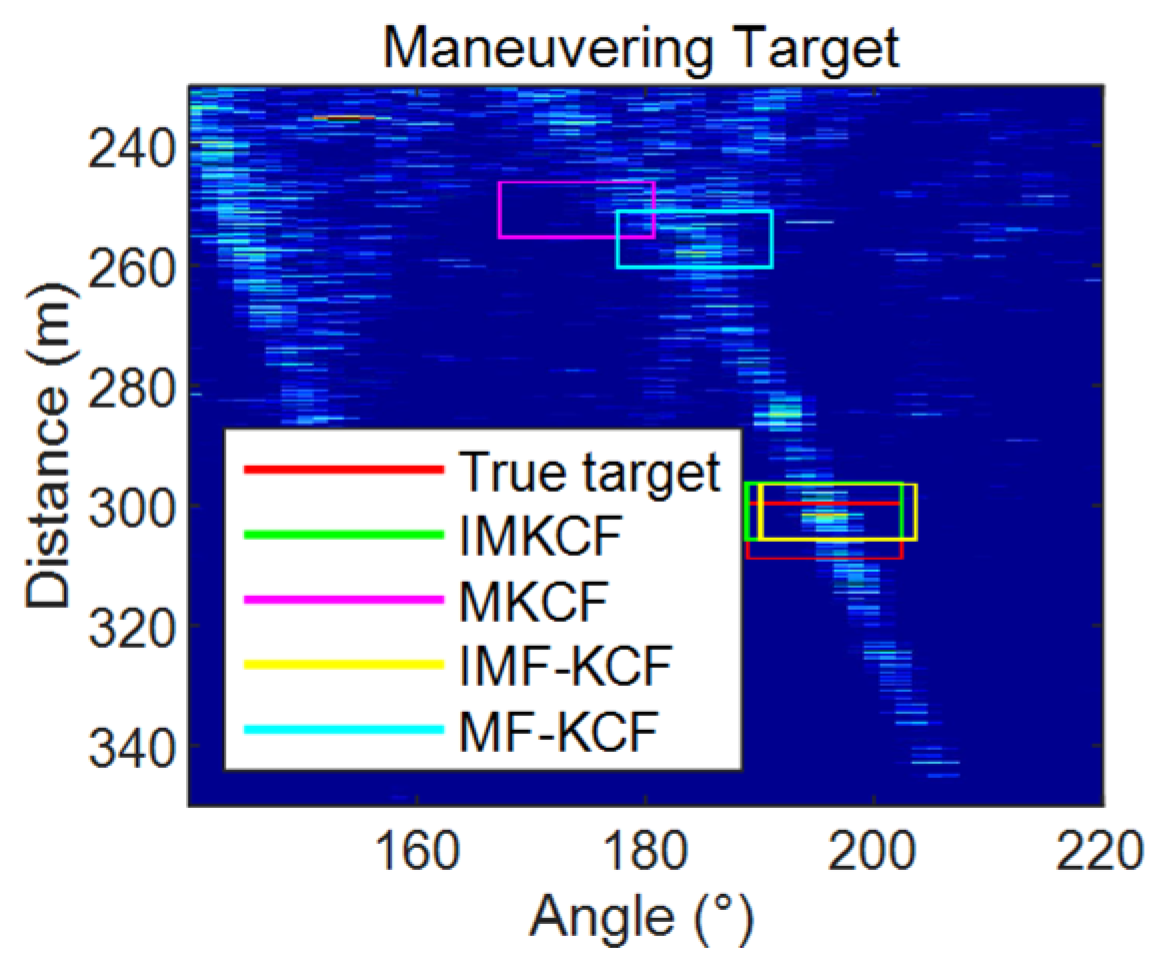
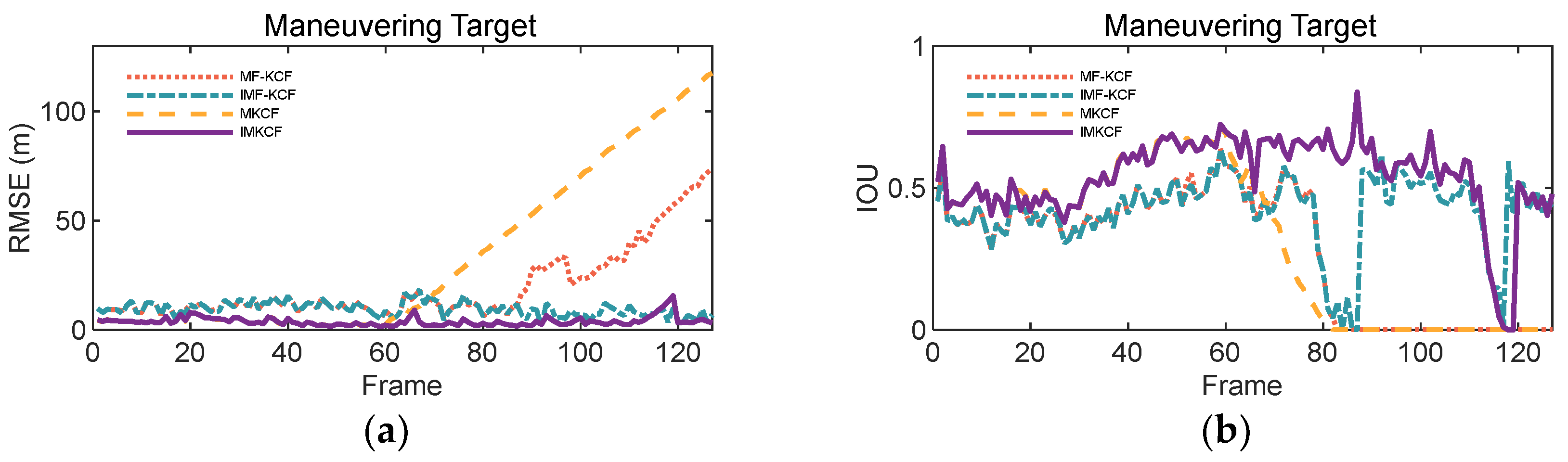
5.3.2. Comparison with Original KCF Algorithms
5.3.3. Algorithm Efficiency
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jeong, T.T. Particle PHD Filter Multiple Target Tracking in Sonar Image. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 409–416. [Google Scholar] [CrossRef]
- Rodningsby, A.; Bar-Shalom, Y. Tracking of Divers using a Probabilistic Data Association Filter with a Bubble Model. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1181–1193. [Google Scholar] [CrossRef]
- Zhang, H.; Tian, M.; Ouyang, Q.; Liu, J.; Shao, G.; Cheng, J. Track Detection of Underwater Moving Targets Based on CFAR. J. Phys. Conf. Ser. 2023, 2486, 012076. [Google Scholar] [CrossRef]
- Zhu, J.; Song, Y.; Jiang, N.; Xie, Z.; Fan, C.; Huang, X. Enhanced Doppler Resolution and Sidelobe Suppression Performance for Golay Complementary Waveforms. Remote Sens. 2023, 15, 2452. [Google Scholar] [CrossRef]
- Zhang, D.; Gao, L.; Sun, D.; Teng, T. Soft-decision Detection of Weak Tonals for Passive Sonar using Track-before-detect Method. Appl. Acoust. 2022, 188, 108549. [Google Scholar] [CrossRef]
- Yi, W.; Fu, L.; García-Fernández, Á.F.; Xu, L.; Kong, L. Particle Filtering based Track-before-detect Method for Passive Array Sonar Systems. Signal Process. 2019, 165, 303–314. [Google Scholar] [CrossRef]
- Vivone, G.; Braca, P. Joint Probabilistic Data Association Tracker for Extended Target Tracking Applied to X-Band Marine Radar Data. IEEE J. Ocean. Eng. 2016, 41, 1007–1019. [Google Scholar] [CrossRef]
- Yang, S.; Thormann, K.; Baum, M. Linear-Time Joint Probabilistic Data Association for Multiple Extended Object Tracking. In Proceedings of the 2018 IEEE 10th Sensor Array and Multichannel Signal Processing Workshop (SAM), Sheffield, UK, 8–11 July 2018; pp. 6–10. [Google Scholar]
- Blackman, S.S. Multiple Hypothesis Tracking for Multiple Target Tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Li, X.; Zhao, C.; Lu, X.; Wei, W. Underwater Bearings-Only Multitarget Tracking Based on Modified PMHT in Dense-Cluttered Environment. IEEE Access 2019, 7, 93678–93689. [Google Scholar] [CrossRef]
- Zhou, T.; Wang, Y.; Chen, B.; Zhu, J.; Yu, X. Underwater Multitarget Tracking with Sonar Images Using Thresholded Sequential Monte Carlo Probability Hypothesis Density Algorithm. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1506305. [Google Scholar] [CrossRef]
- Williams, J.L. Marginal Multi-bernoulli Filters: RFS Derivation of MHT, JIPDA, and Association-based Member. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1664–1687. [Google Scholar] [CrossRef]
- Chai, L.; Kong, L.; Li, S.; Yi, W. The Multiple Model Multi-Bernoulli Filter based Track-before-detect using a Likelihood based Adaptive Birth Distribution. Signal Process. 2020, 171, 107501. [Google Scholar] [CrossRef]
- Li, S.; Yi, W.; Kong, L.; Wang, B. Multi-bernoulli Filter based Track-before-detect for Jump Markov Models. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 1257–1261. [Google Scholar]
- Liu, Z.-X.; Zhang, Q.-Q.; Li, L.-Q.; Xie, W.-X. Tracking Multiple Maneuvering Targets using a Sequential Multiple Target Bayes Filter with Jump Markov System Models. Neurocomputing 2016, 216, 183–191. [Google Scholar] [CrossRef]
- Yue, W.; Xu, F.; Xiao, X.; Yang, J. Track-before-Detect Algorithm for Underwater Diver Based on Knowledge-Aided Particle Filter. Sensors 2022, 22, 9649. [Google Scholar] [CrossRef]
- Nam, H.; Han, B. Learning multi-domain convolutional neural networks for visual tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4293–4302. [Google Scholar]
- Fan, H.; Ling, H. SANet: Structure-aware network for visual tracking. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 2217–2224. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H.S. Fully-convolutional Siamese networks for object tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–10 October 2016; pp. 850–865. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In Proceedings of the 12th European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012; pp. 702–715. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed Ttracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Shin, J.; Kim, H.; Kim, D.; Paik, J. Fast and Robust Object Tracking Using Tracking Failure Detection in Kernelized Correlation Filter. Appl. Sci. 2020, 10, 713. [Google Scholar] [CrossRef]
- Zhang, L.; Suganthan, P.N. Robust Visual Tracking via Co-trained Kernelized Correlation Filters. Pattern Recognit. 2017, 69, 82–93. [Google Scholar] [CrossRef]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H.S. Staple: Complementary Learners for Real-Time Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1401–1409. [Google Scholar]
- Hao, Z.; Liu, G.; Gao, J.; Zhang, H. Robust Visual Tracking Using Structural Patch Response Map Fusion Based on Complementary Correlation Filter and Color Histogram. Sensors 2019, 19, 4178. [Google Scholar] [CrossRef]
- Sun, X.; Cheung, N.-M.; Yao, H.; Guo, Y. Non-rigid Object Tracking via Deformable Patches using Shape-Preserved KCF and Level Sets. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5496–5504. [Google Scholar]
- Zhou, Y.; Su, H.; Tian, S.; Liu, X.; Suo, J. Multiple Kernelized Correlation Filters based Track-Before-Detect Algorithm for Tracking Weak and Extended Target in Marine Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3411–3426. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, T.; Hu, R.; Su, H.; Liu, Y.; Liu, X.; Suo, J.; Snoussi, H. Multiple Kernelized Correlation Filters (MKCF) for Extended Object Tracking Using X-Band Marine Radar Data. IEEE Trans. Signal Process. 2019, 67, 3676–3688. [Google Scholar] [CrossRef]
- Zeng, X.; Xu, L.; Cen, Y.; Zhao, R.; Hu, S.; Xiao, G. Visual Tracking Based on Multi-Feature and Fast Scale Adaptive Kernelized Correlation Filter. IEEE Access 2019, 7, 83209–83228. [Google Scholar] [CrossRef]
- Ren, H.; Qiao, J.; Shi, T. Multifeature Fusion Tracking Algorithm Based on Self-Associative Memory Learning Mechanism. IEEE Access 2022, 10, 100605–100614. [Google Scholar] [CrossRef]
- Tang, M.; Feng, J. Multi-kernel Correlation Filter for Visual Tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3038–3046. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual Object Tracking using Adaptive Correlation Filters. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Wang, N.; Zhou, W.; Li, H. Reliable Re-Detection for Long-Term Tracking. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 730–743. [Google Scholar] [CrossRef]
- Ma, C.; Yang, X.; Zhang, C.; Yang, M.-H. Long-term Correlation Tracking. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5388–5396. [Google Scholar]
- Tang, F.; Ling, Q. Contour-Aware Long-Term Tracking with Reliable Re-Detection. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 4739–4754. [Google Scholar] [CrossRef]
- Varma, M.; Ray, D. Learning the Discriminative Power-Invariance Trade-Off. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Esmzad, R.; Mahboobi Esfanjani, R. Modified likelihood probabilistic data association filter for tracking systems with delayed and lost measurements. Digit. Signal Process. 2018, 76, 66–74. [Google Scholar] [CrossRef]
- Tang, M.; Yu, B.; Zhang, F.; Wang, J. High-Speed Tracking with Multi-kernel Correlation Filters. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, CA, USA, 18–23 June 2018; pp. 4874–4883. [Google Scholar]
- Danelljan, M.; Khan, F.S.; Felsberg, M.; van de Weijer, J. Adaptive Color Attributes for Real-Time Visual Tracking. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 1090–1097. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Abbreviation |
|---|---|
| Multiple Hypothesis Tracking | MHT |
| Joint Probabilistic Data Association | JPDA |
| Probability Hypothesis Density | PHD |
| Multi-Feature Kernel Correlation Filter | MF-KCF |
| Multi-Kernel Correlation Filter | MKCF |
| Improved Multi-Feature Kernel Correlation Filter | IMF-KCF |
| Improved Multi-Kernel Correlation Filter | IMKCF |
| MHT | JPDA | PHD | MF-KCF | MKCF | IMF-KCF | IMKCF | |
|---|---|---|---|---|---|---|---|
| FPS | 7.2 | 107.1 | 122.3 | 22.3 | 27.2 | 11.3 | 14.2 |
| RMSEaver | 44.82 | 10.26 | 50.83 | 19.94 | 33.52 | 9.6 | 3.86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, W.; Xu, F.; Yang, J. Tracking-by-Detection Algorithm for Underwater Target Based on Improved Multi-Kernel Correlation Filter. Remote Sens. 2024, 16, 323. https://doi.org/10.3390/rs16020323
Yue W, Xu F, Yang J. Tracking-by-Detection Algorithm for Underwater Target Based on Improved Multi-Kernel Correlation Filter. Remote Sensing. 2024; 16(2):323. https://doi.org/10.3390/rs16020323
Chicago/Turabian StyleYue, Wenrong, Feng Xu, and Juan Yang. 2024. "Tracking-by-Detection Algorithm for Underwater Target Based on Improved Multi-Kernel Correlation Filter" Remote Sensing 16, no. 2: 323. https://doi.org/10.3390/rs16020323
APA StyleYue, W., Xu, F., & Yang, J. (2024). Tracking-by-Detection Algorithm for Underwater Target Based on Improved Multi-Kernel Correlation Filter. Remote Sensing, 16(2), 323. https://doi.org/10.3390/rs16020323