1. Introduction
SAR tomography (TomoSAR) is a powerful method for three-dimensional (3D) imaging [
1,
2]. The height resolution is acquired by multi-angle coherent measurements of the same area [
3]. In spaceborne multi-pass SAR tomographic processing, the atmospheric phase screen (APS) is a significant factor affecting the accuracy of tomographic imaging [
4,
5]. The reference network (RN) method was originally proposed in persistent scatterer interferometry (PSI) research to tackle the APS problem and was then employed in TomoSAR research [
6,
7]. The PSs exhibit high coherence throughout the entire temporal baseline and can be selected using the amplitude dispersion index or coherence coefficient [
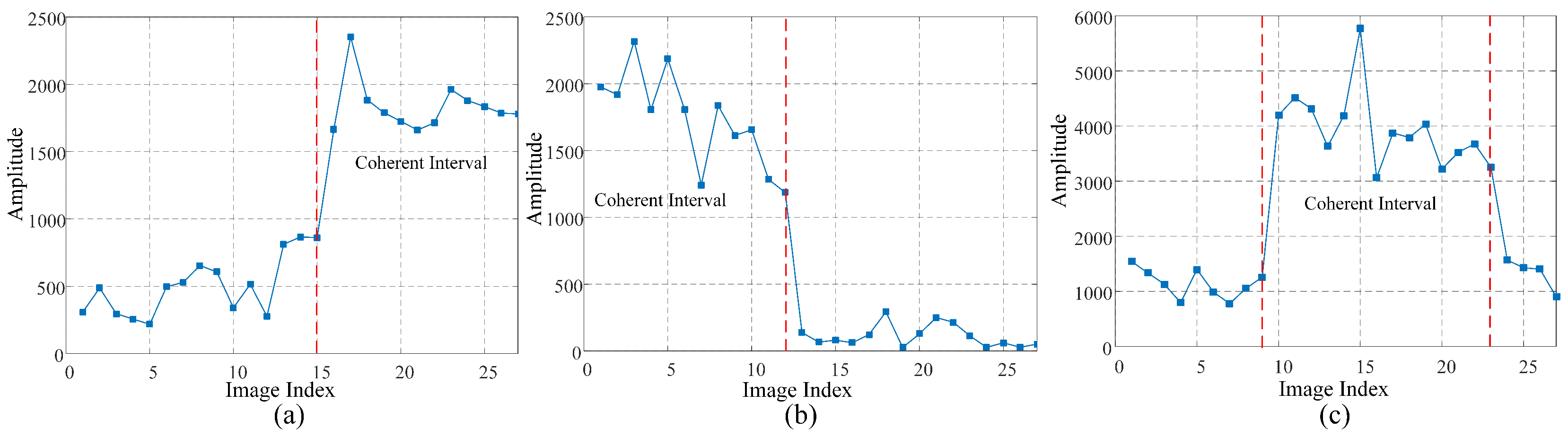
8]. In urban areas, buildings and artificial structures typically exhibit a high density of persistent scatterers (PSs), resulting in favorable elevation inversion outcomes when employing PS-based TomoSAR methods. However, rapid urbanization has given rise to the emergence, migration, and disappearance of buildings and other targets, which can significantly alter the scattering characteristics of these targets over temporal baselines. These changing areas often exhibit a sparse distribution of PSs, which hinder the effectiveness of SAR tomography, including APS correction based on PSs and 3D reconstruction over the entire scene. This issue is particularly pronounced in the process of acquiring SAR tomographic datasets through multi-pass spaceborne SAR systems. Partially coherent scatterers (PCSs), characterized by high interferometric coherence over a partial temporal baseline, are introduced to capture temporary coherence in long time-series SAR datasets. PCSs exhibit features similar to those of PSs, particularly regarding amplitude stability and interferometric phase stability within their coherent intervals. Considering the potential of PCS for the dynamic monitoring of changing areas, this paper proposes a novel approach for the tomographic application of PCSs, demonstrating their capability to describe dynamic variations.
In recent years, significant attention has been devoted to the detection and application of PCS points. Accurate detection of substantial changes in the time series of individual pixels is essential for selecting PCSs. The Bayesian stepwise detectors [
9], which consider Gaussian approximations of amplitude series, have been employed for detecting mutations. In [
10], the genetic algorithms have also been utilized to estimate the start and end times of PCSs through interferometric phase series analysis, aiding in the detection of surface subsidence. An InSAR analysis approach was used for identifying and extracting the temporarily coherent points [
11,
12]. The PCS is identified based on the spatial characteristics of the range and azimuth offsets of coherent radar scatterers. The detected PCSs are introduced to efficient ground deformation mapping, even from a relatively smaller set of interferograms. In [
13], a novel Quasi-PS (QPS) technique is presented to relax the stringent conditions of PS methods in multi-master interferometric SAR (MT-INSAR) processing. This approach enhances point density and performance in natural environments compared with traditional PS-based methods. Additionally, statistical methods are also applied to PSC detection as the distribution of an amplitude series is linked to the coherence properties of ground targets [
14]. An analysis of variance (ANOVA) detector has been proposed in [
15] to identify temporal changes of PCSs. Assuming a Gaussian distribution for amplitude time series, this method analyzes variance and employs differences within and outside coherent intervals to develop an F-test detector. Alternatively, a method based on Rayleigh distribution assumptions distinguishes significant changes by analyzing both the amplitude and interferometric phase [
16]. A unified Rayleigh test and F-test are sequentially applied to select potential PCSs and automatically determine step times. The interferometric phase of these PCSs is then used to provide precise insights into temporal variations in target scattering characteristics. A classification method has been proposed to evaluate changes based on the distribution of PCSs [
17], distinguishing between significant changes due to building alterations, seasonal variations, and minor surface deformations.
However, applying existing methods to PCSs in dynamic regions poses several challenges. Although current methods are effective at identifying PCS points, they primarily focus on superficial features of detected PCSs, such as change locations and distribution densities. The elevation information inherent in PCS points, which is crucial for monitoring vertical dynamic changes in evolving regions, is often neglected. This oversight impedes a comprehensive analysis of vertical changes using multi-temporal SAR datasets. As an effective 3D reconstruction method, the potential of applying SAR tomography to the processing of PCSs has yet to be explored. To fully leverage PCSs for tomographic applications, two critical challenges must be addressed. First, a standardized criterion is required to determine the precise temporal intervals during which PCS points are suitable for SAR tomography. This is crucial due to the unique distribution characteristics of PCSs along temporal baselines, which differ significantly from traditional PS points. Second, the irregular distribution of PCS points poses difficulties in achieving comprehensive spatial coverage and capturing precise elevation information. These challenges must be overcome to enable the effectiveness of PCS-based TomoSAR applications.
To tackle these challenges, we propose a novel 3D reconstruction method for PCS points through iterative sub-network generation. Initially, a coherence-constrained optimized ANOVA detection method specifically tailored for PCS selection is proposed. This approach integrates coherence interval verification to improve the reliability of the ANOVA results for the TomoSAR application. Drawing inspiration from the two-tier network approach in SAR tomography, our method employs a high-quality PS reference network as the main framework and iteratively constructs local star networks for a comprehensive coverage of the identified PCSs. Subsequently, the unified network of PCSs and PSs is used to accurately invert the height map of PCS points. Experiments have been conducted on the TerraSAR-X multi-pass dataset, which observes an urban area with variations over time. By incorporating PCS points into the SAR tomography imaging process, we achieve a notable improvement for monitoring dynamic changes in urban environments.
The rest of the paper is structured as follows.
Section 2 introduces the SAR tomography based on the reference network technique and concept of PCSs.
Section 3 presents the proposed PCS selection method, along with the novel two-tier network for the tomograpchic inversion of PCSs. The experimental results and analysis are outlined in
Section 4.
Section 5 presents the discussion and
Section 6 is the conclusion.
3. Detection and 3D Reconstruction of PCS
3.1. PCS Detection for TomoSAR Based on Coherence Constraint Iterative Variance Analysis
This section presents a method for selecting PCSs from multi-temporal SAR dataset based on a coherence constraint iterative analysis of variance. The methodology comprises three main components.
Selecting PCS candidates to identify the existence of PCS at each pixel.
Iteratively searching for step change positions of PCS candidates using ANOVA, considering the possibility of multiple positions.
Confirming the identified step change positions and coherent intervals. As the time series are segmented into multiple sub-intervals, only coherent intervals suitable for SAR tomography processing are derived by imposing the coherence constraint.
Assume that the SAR dataset contains N co-registered SLC images; the amplitude time series at a specific pixel can be denoted by . The specific explanations of each step are provided below.
3.1.1. PCS Candidates Selection
Firstly, PS candidates are identified from using an ADI threshold. The selected PSs are utilized for subsequent TomoSAR processing based on the RN method. For the remaining non-PS pixels, the amplitude peak threshold (APT) method is employed to select PCS candidates. When the peak value of
exceeds the specified threshold, it is considered as a potential pixel containing PCS.
Here,
is typically chosen as the mean of all pixel amplitude values [
6].
3.1.2. Iterative Analysis of Variance (ANOVA)
The ANOVA method dissects the overall variance of pixel amplitude series into between-group variance and within-group variance to assess the significance of distinctions among sub-sequences. Assuming the step change position lies between , the original sequence is partitioned into two parts . A hypothesis test is conducted to ascertain if the two sub-sequences follow the same distribution and if the position represents a step change.
Because the ADI characterizes the interferometric coherence of pixels, the hypothesis test statistic should be related to both the variance and mean of the pixel amplitude time series. The detection statistic
for the ANOVA method is defined as:
Here,
represents the mean of the entire pixel amplitude sequence,
denotes the within-group means, and
represents the within-group variance of the divided sub-sequences. The variance between sequences reflects the differences in means among different sub-sequences, while the within-sequence variance indicates the degree of variation among individuals within the same sub-sequence.
follows an
F distribution with degrees of freedom
.
Equation (11) allows for the design of a test threshold
based on significance level
and degrees of freedom
. Then, the hypothesis test is defined as:
where
indicates that the two sub-sequences do not belong to the same distribution, the pixel is considered a PCS, and the position is a potential step change position. The significance level
typically ranges between 0.01 and 0.1, with a higher
corresponding to lower
. For all positions satisfying Equation (13), the final step change point position is determined as:
Given that there may be multiple coherent intervals in the amplitude series, corresponding to more than one potential step change position, an iterative search for these step change positions is conducted as follows:
Step 1: Search for a single step change position. Employ ANOVA to identify the initial step change position, denoted as .
Step 2: Iterative search for additional step change positions.
Following Step 1, divide the amplitude series into two intervals based on :
. Perform Step 1 within these newly defined sub-intervals. Note that will vary due to changes in the length of the sub-sequences, which affects the degrees of freedom. Consequently, must be updated at each iteration.
Step 3: Finalize the division of the amplitude series.
Repeat Steps 1 and 2 iteratively to search for additional step change positions. Continue this process until no further step change positions can be identified from subsequent divisions. Assuming all step change positions are
, the amplitude series are divided into
M segments:
3.1.3. Coherent Interval Confirmation
Establish constraints for the corresponding sub-sequences within the segments , , acquired in Equation (14), *to assess their suitability for TomoSAR processing.
Coherence constraint. The amplitude series within coherence intervals should exhibit both a higher average amplitude and a lower ADI simultaneously. This can be formally expressed as:
Observation quantity constraint. To ensure the feasibility and accuracy of the tomographic inversion, the suitable coherence intervals must contain a sufficient number of observations. Assuming that the minimum required number of observations for SAR tomography is
D, the coherence interval for PCSs must meet the following condition [
27,
28]:
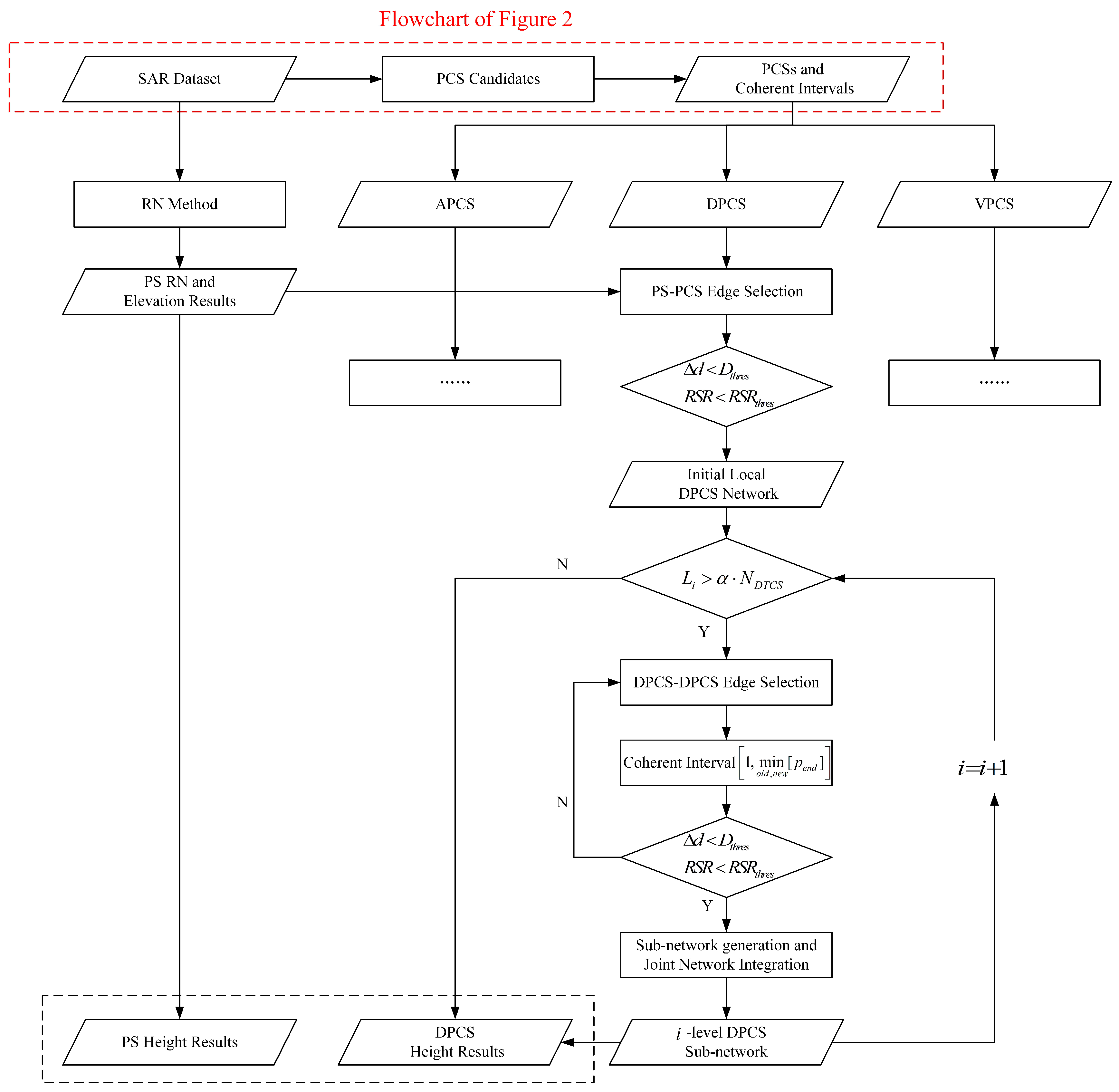
The flowchart of the proposed PCS detection methodology is presented in
Figure 2. Additionally, the algorithm for the coherence constraint ANOVA is detailed in Algorithm 1.
| Algorithm 1 Coherence constraint ANOVA |
Input: All pixels and corrsponding amplitude time series of each pixel. Step 1: Select PCS candidate set . Step 2: Search for single step change position of each PCSC in . , where is defined in Equation (14). Step 3: Divide into two intervals based on . Two sub-intervals on both sides of . Step 4: Repeat Steps 2 and 3 to until no new can be identified in Step 2. Step change positions and sub-sequences of . Step 5: Confirm the coherent intervals of . Perform the constraint conditions (15) and (16) to partition the statified sub-sequences. Output: PCSs suitable for TomoSAR processing and their coherent intervals .
|
3.2. Three-Dimensional Imaging of PCS by Iterative Sub-Network Generation Method
This section introduces a technique for the 3D imaging of detected PCSs through iterative sub-network generation. The proposed inversion process aims to improve the comprehensiveness and effectiveness of SAR tomography, particularly in dynamic environments. This inversion process is designed to enhance the comprehensiveness and effectiveness of SAR tomography in dynamic environments. In this novel method, the PS reference network and elevation outcomes are initially obtained from
Section 2.2, serving as the reference data for the height inversion of PCSs. A local sub-network, connecting PCSs with resolved PSs, is then constructed to enable the APS correction and relative elevation inversion for the PCSs.
However, the distribution of PCSs in buildings and artificial structures exhibits regional clustering characteristics. Additionally, the geographic area of PCSs often differs from that of PSs, leading to an insufficient number of reference PSs used to establish reliable connections between PCSs and PSs.
To address this issue, the proposed method dynamically expands the local sub-network to connect PCSs. By using the existing network of connected PCSs as the basis for generating subsequent layers, we ultimately achieve a comprehensive coverage of the PCSs and height inversion. Specifically, reliable connections between PSs and PCSs are established to create the initial sub-network. Subsequently, PCSs within the first-level sub-network serve as new references to identify reliable connections with unlinked PCSs, thereby forming the second-level sub-network. This iterative process continues until the size of the newly generated sub-network is below a specified constraint. For each sub-network, the elevations of newly connected PCSs are determined layer by layer through network integration and then incorporated into the final elevation results for all PCSs.
Given the characteristics of PCSs, the observed data series used for tomographic imaging should be within coherent intervals. Additionally, height inversion processing should be performed separately for different types of PCSs as outlined in
Section 2.3.
3.2.1. Initial Sub-Network Generation
Initially, each PCS is connected with the closest PS to form a PS–PCS edge, constituting the first-level sub-network surrounding the reference network. Phase differencing between the endpoints are conducted for each edge to correct the APS error. The differential signal retains solely the observed sequences within the coherent interval of the PCS points, then undergoes tomographic imaging and relative elevation estimation. Ultimately, only high-quality PS–PCS edges meeting the imaging quality criteria are preserved, leading to the initial distribution of the star-shaped network, where the terminal points of each edge represent newly connected PCSs.
Assuming that the PS reference network contains a total number of
Q PSs and
P PS edges. The specific form of the relative elevation vector
, the absolute elevation vector
S, and the transformation matrix
G can be represented as
where
. Assuming that a total number of
PCSs are detected in the initial local network, corresponding to
high-quality PS–PCS edges. Then, the distance and imaging quality constraints for each edge are defined by:
where
represents the spatial distance between the two endpoints and
denotes the residual energy ratio according to Equation (
4) and (6). At this stage, the reference network and the first-level local network can be jointly represented as:
where
,
, | represents the vector concatenation operation. The newly added PCS elevation values
and the corresponding relative elevations
of the edges are, respectively, expressed as:
According to the correspondence of PS–PCS edges,
can be decomposed as follows:
where
and
represent the transformation matrix between
,
, and
, respectively. Consequently, Equation (
20) can be transformed as:
Let
; then, Equation (
22) can be expressed in a similar form to Equation (
20):
This enables the solution for
through the WLS estimator for network integration:
is a weighted diagonal matrix where the diagonal elements correspond to the quality of the tomographic imaging of the differential signals corresponding to the newly generated PS–PCS edges.
3.2.2. Iterative Sub-Network Generation
The initial local network is used to connect PCSs with the PS reference network. However, due to the spatial distribution characteristics of PCSs, there are a number of unconnected PCSs unsatisfying the constraints in Equation (
18). Therefore, it is necessary to expand the initial sub-network through an iterative sub-network method.
The newly generated sub-network is used to connect the remaining unconnected PCSs with the connected PCSs in the previously generated sub-network. The sub-network iteration process is based on the connected PCSs, seeking high-quality PCS–PCS edges between them with unconnected PCS points. Then, a new layer of sub-network and elevation inversion is obtained. During the generation of the initial network, the time interval of the PS–PCS edge differential signal remains consistent with PCS as the coherent interval of PCS is contained in that of PS (entire time baseline). However, during the iterative generation of the sub-network, it is necessary to select a common coherent interval based on the positional relationship of the connected PCSs. The common coherent interval of two endpoints, whose coherent intervals are
and
, can be calculated:
Specifically,
is for the newly generated APCS–APCS edge and
is for DPCS–DPCS edge. Additionally, for the newly generated PCS–PCS edges, it is also necessary to satisfy constraints in Equation (
19).
Assuming the number of iterations is
i with the relative elevation vector
and transformation matrix
in each iteration update. By utilizing the WLS estimator based on Equations (21)–(24), the elevation values of the newly connected PCS points in the
i-th level sub-network can be calculated as follows:
The above sub-network iteration is repeated until a sufficient number of PCSs cannot be connected. The termination criterion for the iteration process is defined as:
where
represents the number of newly connected PCS,
is the total number of PCSs, and
is a scaling factor indicating the proportion of newly connected PCSs to the total PCSs.
signifies that a certain number of high-quality PS–PCS edges can still be established at this stage, allowing for the construction of the next-level sub-network based on the newly connected PCSs. Conversely, Equation (
27) indicates that the newly established sub-network only covers a small portion of the PCSs, leading to the conclusion of the iteration process.
Ultimately, the elevation results connecting all PCSs in the entire local network through sub-network iteration are obtained.
This approach helps prevent the excessive localization of the generated sub-network, ensuring a wider coverage of PCSs. The flowchart of the proposed height inversion of PCSs by the iterative network generation method is given in
Figure 3.
The flowchart input consists of an SAR dataset with N images, generating height results for PSs and PCSs. It primarily details the processing steps for DPCSs, as those for APCSs and VPCSs are similar only with distinct criteria for common coherence intervals calculation. The processing procedures in
Figure 3 for different types of PCSs are independent, enhancing the length of common overlap coherent intervals. These characteristics improve sub-network edge connections and tomographic imaging reliability.
5. Discussion
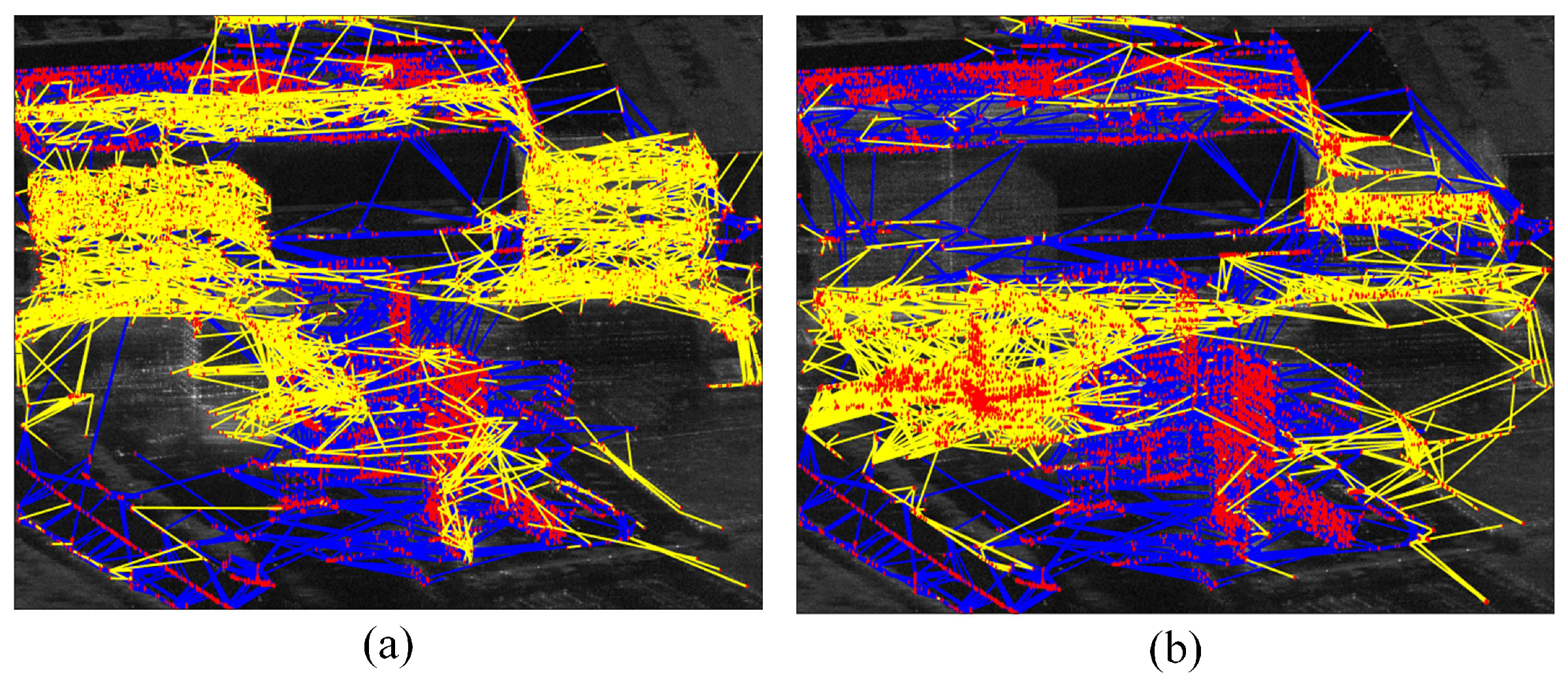
The proposed method effectively addresses the challenges associated with the height inversion of PCSs. As shown in
Figure 12 and
Figure 13, the novel method enables the accurate retrieval of height information for nearly all targets of interest within the study area. The major advantages of this approach is its ability to facilitate height estimation in changing areas using SAR tomography. Moreover, the height estimates obtained from PCSs complement the elevation information derived from PSs, leading to substantial improvements in the overall 3D reconstruction performance. By expanding the range of usable scatterers, particularly in dynamic urban settings, the proposed method offers significant advantages over conventional approaches that predominantly rely on PSs.
Furthermore, the PCS-based TomoSAR method proposed in this paper is primarily designed for an urban environment dominated by point-like scatterers. However, despite its effectiveness in urban environments, the PCS-based TomoSAR method has limitations when applied to distributed scatterers (DSs) and volumetric scatterers, such as those found in natural landscapes. The current workflow, which is optimized for PSs and PCSs, is not equipped to handle temporal changes in these more complex scattering environments. As such, modifying the existing processing framework to accommodate data with varying resolutions and diverse scattering characteristics is a key focus for future research. These modifications will be essential for extending the applicability of the proposed method beyond urban environments, ensuring its effectiveness in a wider range of landscapes.
In summary, while the current approach demonstrates significant improvements in urban 3D reconstruction, addressing the limitations associated with distributed and volumetric scatterers remains an important direction for future work. Enhancing the method to handle these challenges will further expand its utility in both urban and natural environments.
6. Conclusions
In this paper, we present a novel method that utilizes PCSs to enhance 3D reconstruction in dynamic urban environments through SAR tomography. This method incorporates an iterative sub-network generation technique to optimize the use of PCSs, addressing the limitations associated with traditional PS-based approaches. A coherence-constrained iterative variance analysis method is employed to determine the suitable time–baseline ranges for PCS application in TomoSAR. Additionally, we propose a sub-network generation approach that connects PCSs based on a reference network of PSs. This optimized network construction method effectively accounts for the distribution of PCSs, providing comprehensive coverage and ensuring their effective contribution to 3D reconstruction.
Compared with conventional methods that predominantly rely on PSs, the proposed approach significantly expands the range of usable scatterers, particularly in time-variant urban environments. Validation with the TerraSAR-X dataset demonstrates that the height estimates of PCSs offer complementary elevation information to that obtained from PSs, resulting in substantial improvements in 3D reconstruction performance in evolving urban settings.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}