
Infrared Weak Target Detection in Dual Images and Dual Areas


Abstract
1. Introduction
- We introduced a novel double-image and double-local contrast measurement (DDLCM) method for IR target detection. This approach utilizes a specialized similarity-focus design to significantly enhance the detection of weak small targets.
- We devised a dual-neighborhood sliding window structure to amplify the difference between the target and the local background, thereby improving target saliency and contrast.
- We released a test dataset of 100 real IR images of IRWS targets to advance the development of the detection method.
2. Related Works
2.1. Methods Based on Multi-Frame Detection
2.2. Methods Based on Single-Frame Detection
3. Methods
3.1. Construction of Similarity Focus
3.2. Dual-Image Grayscale Difference Contrast Calculation
3.3. Odd and Even Area Contrast Consistency
| Algorithm 1 DDLCM area processing algorithm |
| Input: the IR image I, length parameter len Output: result image L /*Initialization*/ The size of the image is (R × C) Initialize window pixel line number Filtered image = (R, C, nr × nc). Array op = . for (ii=1; ii<=nr×nc; ii++) do Create a per-cell binary filter mask. Normalize and transpose matrix and store it in op. Apply each filter from op to the input image. end for Compute the inner window contrast . Determine the difference between each layer Find the minimum difference . Calculate the gray difference in various child areas Merge child areas and target areas for the minimum value . Calculate . .. return result image L |
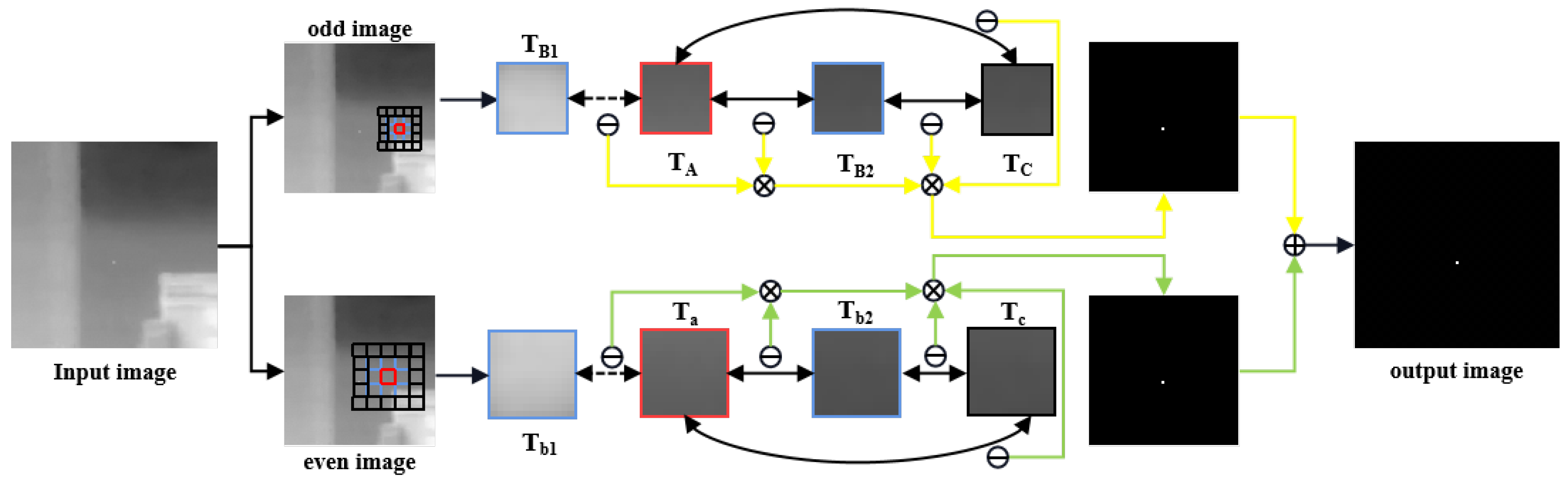
3.4. Infrared Detection DDLCM Framework
- The SF strategy simplifies the algorithm and enhances multiscale analysis from various angles. However, due to inherent limitations, the target size must exceed to avoid ambiguity between even and odd images.
- The SF strategy captures a broader range of image contrast, enhancing the processing of targets with low contrast.
- The DNSM strategy reveals relationships between different image patches, aiding in the detection of small IR targets.
- This combination enhances target detection accuracy and requires fewer manual parameter adjustments, minimizing human intervention. Thus, setting appropriate values for each parameter in these two strategies is straightforward.
| Algorithm 2 DDLCM IR detection framework |
| Input: the image I2 Output: Combined result image L2 /*Initialization*/ The size of the image is (R2 × C2) initialize padding flags /*Calculate padding size*/ for (x = rows or cols) do if (x is an odd number) then Assign the corresponding padding flags to 1 end if for (i = 1; i<=(x - padding flags) ; i+=2) do Extract a subset of an image. end for end for Use Algorithm 1 to obtain two result images and ; Merge and ; return Combined result image L2 |
3.5. Target Adaptive Extraction
4. Experiments
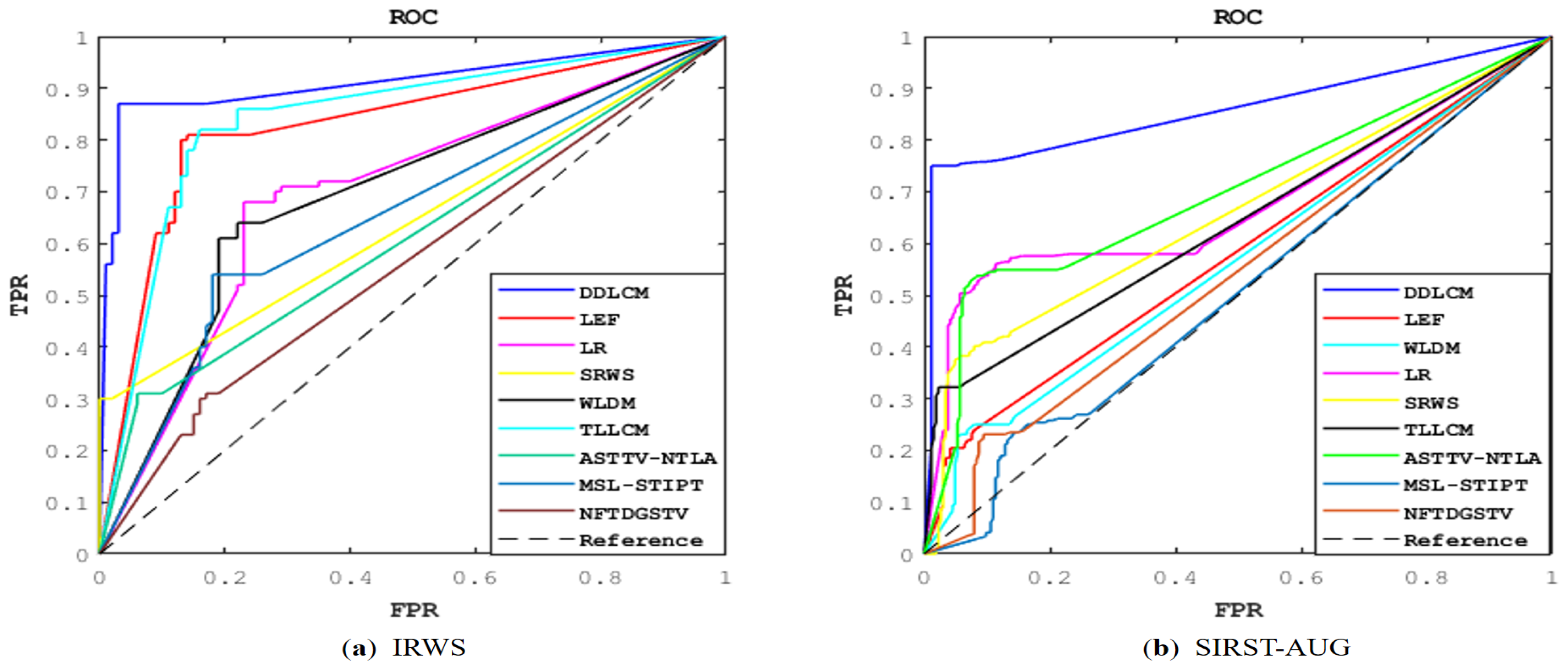
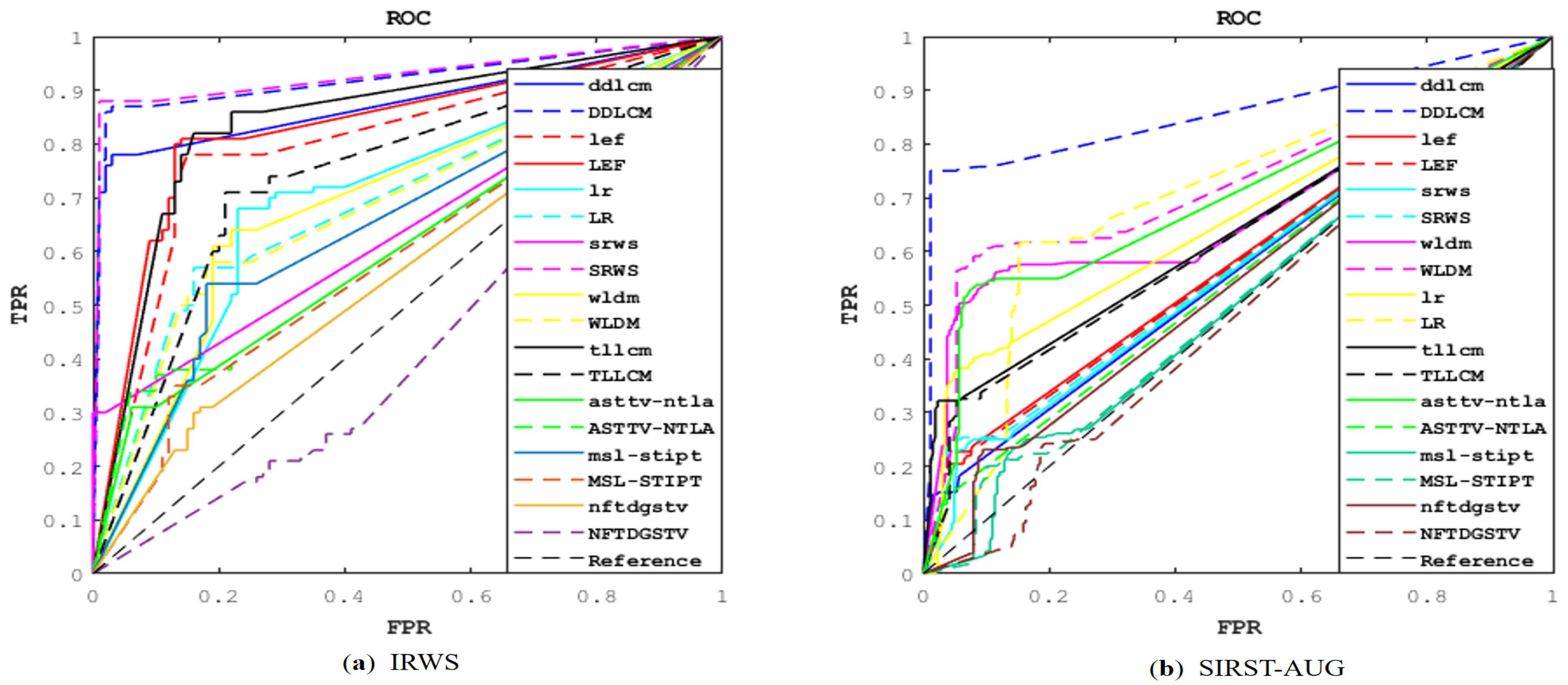
4.1. Evaluation Metrics
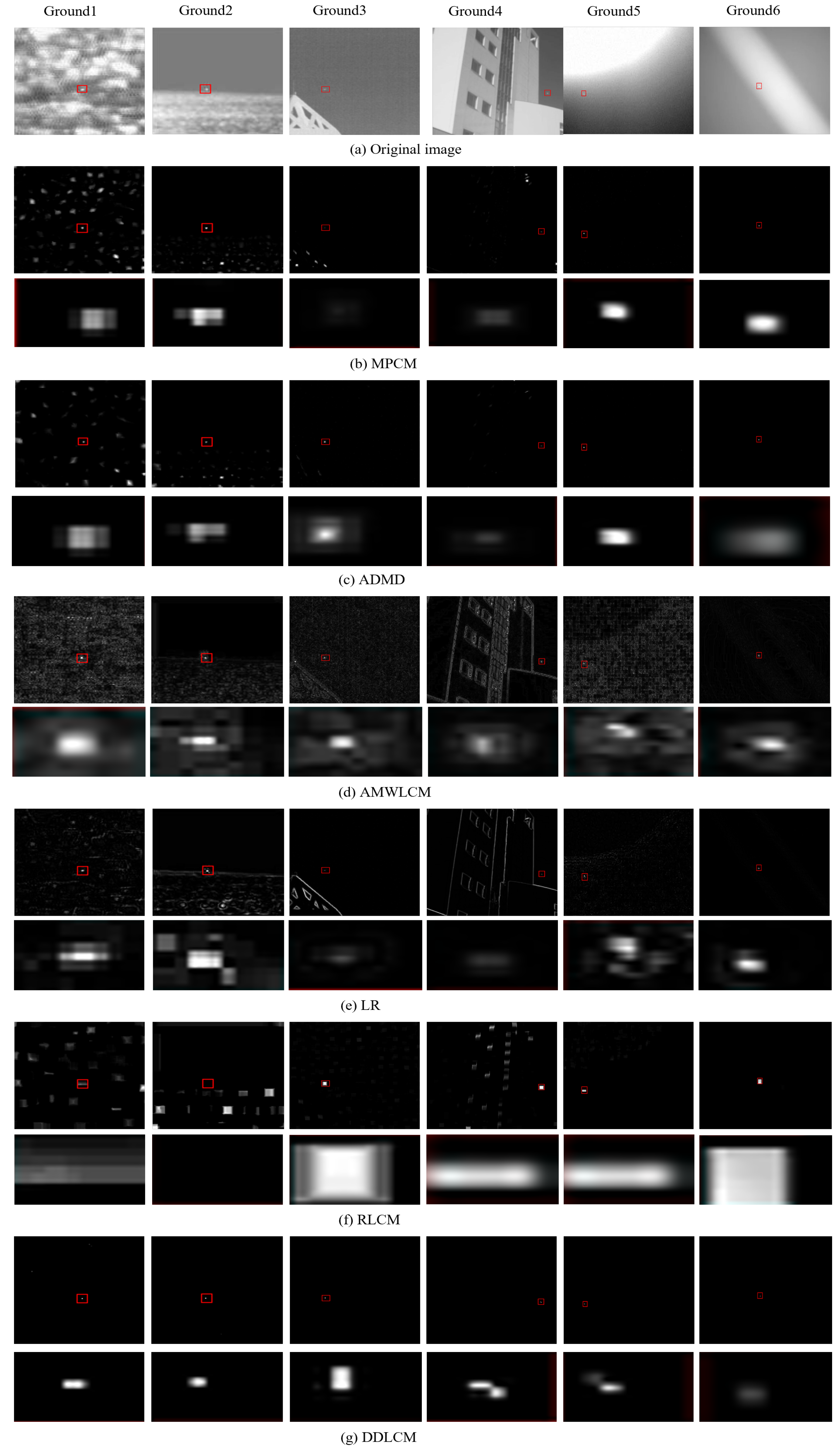
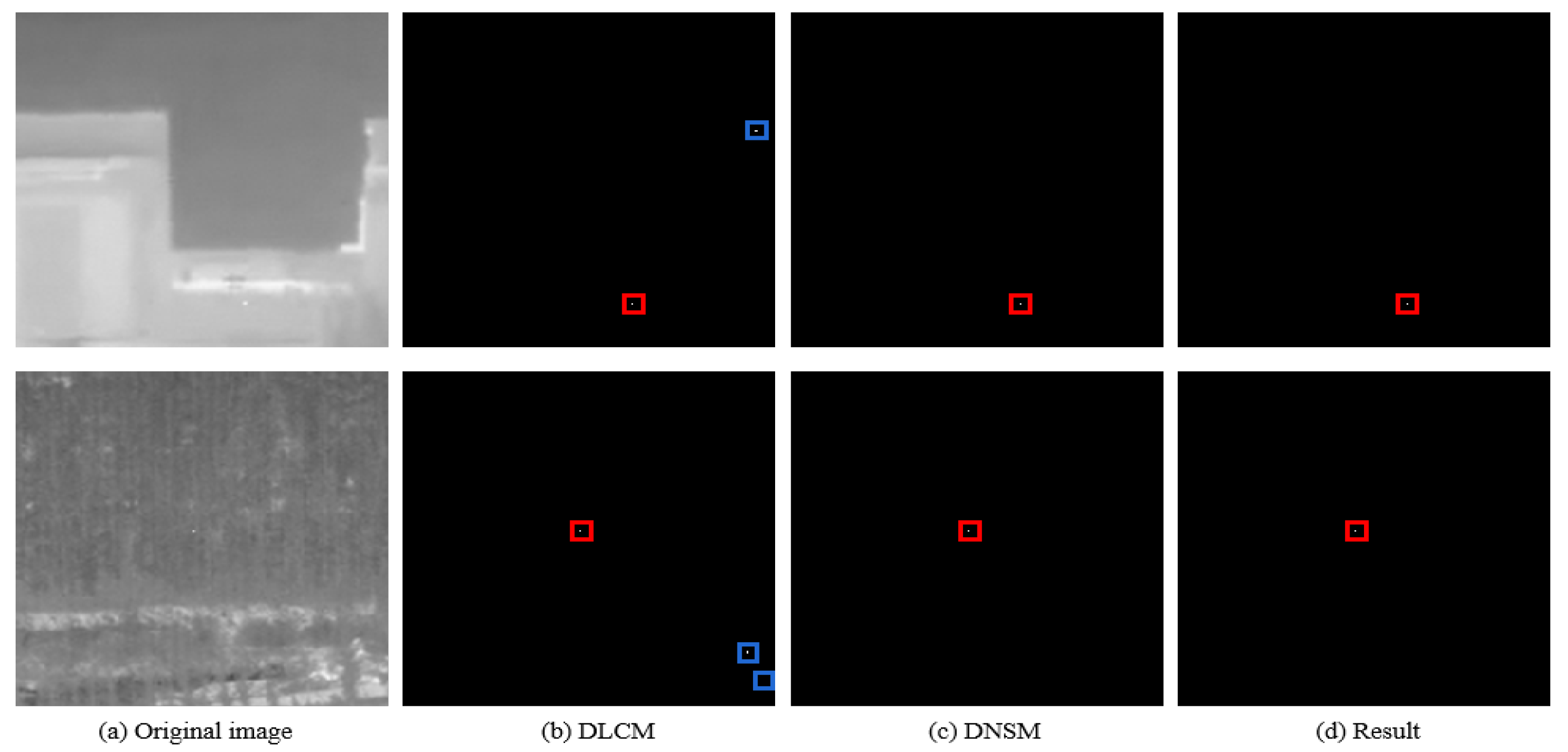
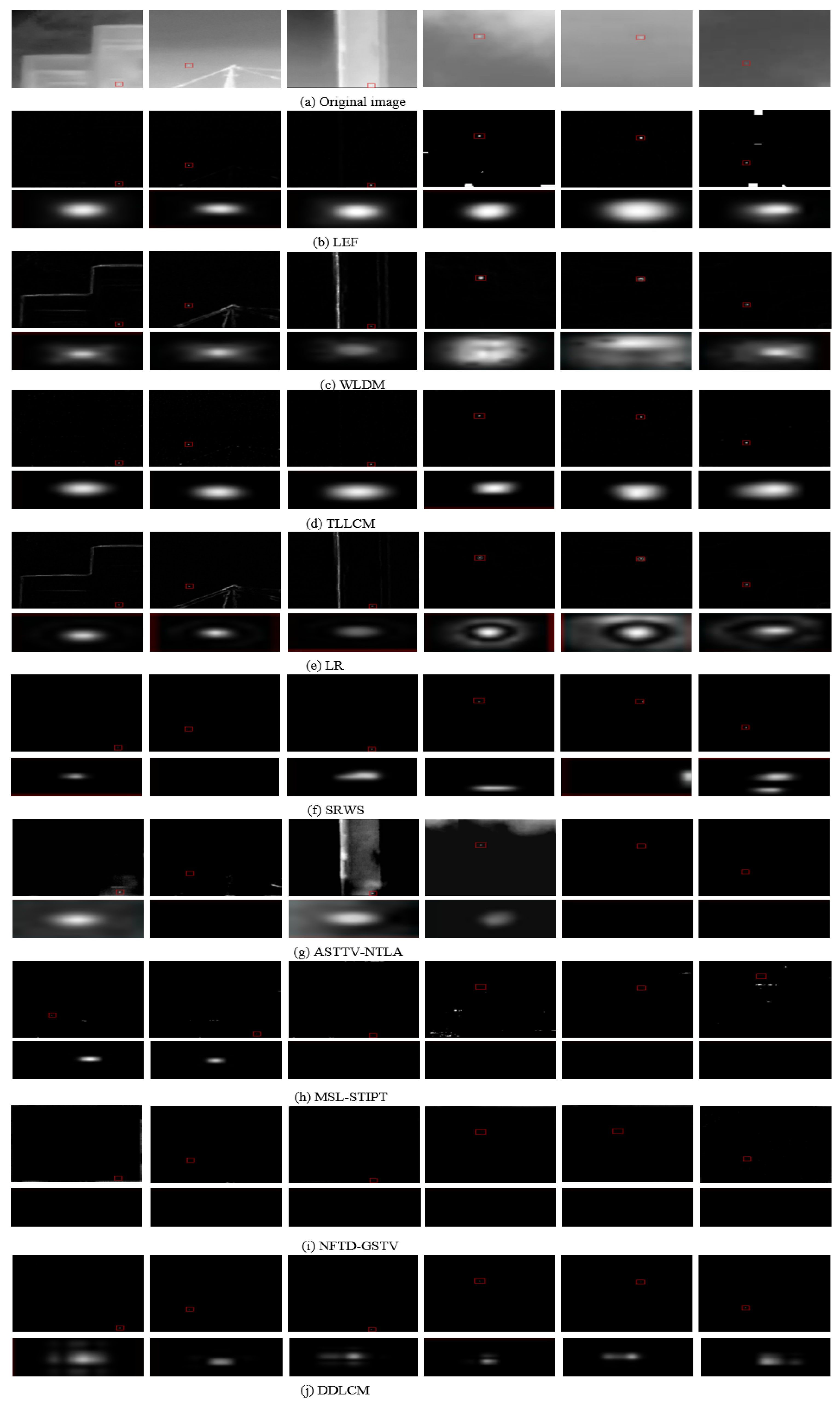
4.2. Qualitative Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guan, X.; Zhang, L.; Huang, S.; Peng, Z. Infrared small target detection via non-convex tensor rank surrogate joint local contrast energy. Remote Sens. 2020, 12, 1520. [Google Scholar] [CrossRef]
- Ahmadi, K.; Salari, E. Small dim object tracking using frequency and spatial domain information. Pattern Recognit. 2016, 58, 227–234. [Google Scholar] [CrossRef]
- Lu, R.; Yang, X.; Li, W.; Fan, J.; Li, D.; Jing, X. Robust infrared small target detection via multidirectional derivative-based weighted contrast measure. IEEE Geosci. Remote Sens. Lett. 2020, 19, 7000105. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Guo, Z.; Siddique, A.; Liu, Y.; Yu, K. Infrared small target detection based on adaptive region growing algorithm with iterative threshold analysis. IEEE Trans. Geosci. Remote Sens. 2024. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Attentional local contrast networks for infrared small target detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9813–9824. [Google Scholar] [CrossRef]
- Hou, Q.; Wang, Z.; Tan, F.; Zhao, Y.; Zheng, H.; Zhang, W. RISTDnet: Robust infrared small target detection network. IEEE Geosci. Remote Sens. Lett. 2021, 19, 7000805. [Google Scholar] [CrossRef]
- Liu, D.; Li, Z.; Liu, B.; Chen, W.; Liu, T.; Cao, L. Infrared small target detection in heavy sky scene clutter based on sparse representation. Infrared Phys. Technol. 2017, 85, 13–31. [Google Scholar] [CrossRef]
- Peng, L.; Lu, Z.; Lei, T.; Jiang, P. Dual-Structure Elements Morphological Filtering and Local Z-Score Normalization for Infrared Small Target Detection against Heavy Clouds. Remote Sens. 2024, 16, 2343. [Google Scholar] [CrossRef]
- Qiang, W.; Hua-Kai, L. An Infrared Small Target Fast Detection Algorithm in the Sky Based on Human Visual System. In Proceedings of the 2018 4th Annual International Conference on Network and Information Systems for Computers (ICNISC), Wuhan, China, 19–21 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 176–181. [Google Scholar]
- Wang, H.; Zhou, L.; Wang, L. Miss detection vs. false alarm: Adversarial learning for small object segmentation in infrared images. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8509–8518. [Google Scholar]
- Guo, F.; Ma, H.; Li, L.; Lv, M.; Jia, Z. FCNet: Flexible Convolution Network for Infrared Small Ship Detection. Remote Sens. 2024, 16, 2218. [Google Scholar] [CrossRef]
- Li, B.; Xiao, C.; Wang, L.; Wang, Y.; Lin, Z.; Li, M.; An, W.; Guo, Y. Dense Nested Attention Network for Infrared Small Target Detection. IEEE Trans. Image Process. 2022, 32, 1745–1758. [Google Scholar] [CrossRef]
- Li, J.H.; Zhang, P.; Wang, X.W.; Huang, S.Z. Infrared small-target detection algorithms: A survey. J. Image Graph. 2020, 25, 1739–1753. [Google Scholar]
- Rogalski, A. Infrared detectors: An overview. Infrared Phys. Technol. 2002, 43, 187–210. [Google Scholar] [CrossRef]
- Barth, A. Infrared spectroscopy of proteins. Biochim. Biophys. Acta-(BBA)-Bioenerg. 2007, 1767, 1073–1101. [Google Scholar] [CrossRef]
- Rogalski, A. Recent progress in infrared detector technologies. Infrared Phys. Technol. 2011, 54, 136–154. [Google Scholar] [CrossRef]
- Jiang, A.; Kennedy, D.N.; Baker, J.R.; Weisskoff, R.M.; Tootell, R.B.; Woods, R.P.; Benson, R.R.; Kwong, K.K.; Brady, T.J.; Rosen, B.R. Motion detection and correction in functional MR imaging. Hum. Brain Mapp. 1995, 3, 224–235. [Google Scholar] [CrossRef]
- Morgan, M.J. Spatial filtering precedes motion detection. Nature 1992, 355, 344–346. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Lu, X.; He, Z.; Zhang, C.; Chen, W.S. Deep convolutional neural networks for thermal infrared object tracking. Knowl.-Based Syst. 2017, 134, 189–198. [Google Scholar] [CrossRef]
- Xiang, Y.I.; Wang, B. Fast infrared and dim target detection algorithm based on multi-feature. Acta Photonica Sin. 2017, 46, 610002. [Google Scholar] [CrossRef]
- Jiao, J.; Lingda, W. Infrared dim small target detection method based on background prediction and high-order statistics. In Proceedings of the 2017 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 53–57. [Google Scholar]
- Zhang, P.; Wang, X.; Wang, X.; Fei, C.; Guo, Z. Infrared small target detection based on spatial-temporal enhancement using quaternion discrete cosine transform. IEEE Access 2019, 7, 54712–54723. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, L.; Zhang, Y. Small infrared target detection via a Mexican-Hat distribution. Appl. Sci. 2019, 9, 5570. [Google Scholar] [CrossRef]
- Chen, C.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. Alocal contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Han, J.; Liang, K.; Zhou, B.; Zhu, X.; Zhao, J.; Zhao, L. Infrared small target detection utilizing the multiscale relative local contrast measure. IEEE Geosci. Remote Sens. Lett. 2018, 15, 612–616. [Google Scholar] [CrossRef]
- Pan, S.D.; Zhang, S.; Zhao, M.; An, B.W. Infrared small target detection based on double-layer local contrast measure. Acta Photonica Sin. 2020, 49, 0110003. [Google Scholar]
- Lin, S.; Zhang, H.; Lu, X.; Li, D.; Li, Y. RBNSM: A Novel Method for Weak Small Infrared Target Detection in Complex Backgrounds. Infrared Technol. 2022, 44, 667–675. [Google Scholar]
- Pan, L.; Liu, T.; Cheng, J.; Cheng, B.; Cai, Y. AIMED-Net: An Enhancing Infrared Small Target Detection Net in UAVs with Multi-Layer Feature Enhancement for Edge Computing. Remote Sens. 2024, 16, 1776. [Google Scholar] [CrossRef]
- Thorpe, S.; Fize, D.; Marlot, C. Speed of processing in the human visual system. Nature 1996, 381, 520–522. [Google Scholar] [CrossRef]
- Banks, M.S.; Read, J.C.; Allison, R.S.; Watt, S.J. Stereoscopy and the human visual system. Smpte Motion Imaging J. 2012, 121, 24–43. [Google Scholar] [CrossRef]
- Adini, Y.; Sagi, D.; Tsodyks, M. Context-enabled learning in the human visual system. Nature 2002, 415, 790–793. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Cao, S.; Pu, T.; Peng, Z. AGPCNet: Attention-Guided Pyramid Context Networks for Infrared Small Target Detection. arXiv 2021, arXiv:2111.03580. [Google Scholar]
- Gao, C.; Meng, D.; Yang, Y.; Wang, Y.; Zhou, X.; Hauptmann, A.G. Infrared patch-image model for small target detection in a single image. IEEE Trans. Image Process. 2013, 22, 4996–5009. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Ma, H.; Li, L.; Lv, M.; Jia, Z. Multi-attention pyramid context network for infrared small ship detection. J. Mar. Sci. Eng. 2024, 12, 345. [Google Scholar] [CrossRef]
- Li, L.; Ma, H.; Jia, Z. Gamma correction-based automatic unsupervised change detection in SAR images via FLICM model. J. Indian Soc. Remote Sens. 2023, 51, 1077–1088. [Google Scholar] [CrossRef]
- Li, L.; Ma, H.; Zhang, X.; Zhao, X.; Lv, M.; Jia, Z. Synthetic aperture radar image change detection based on principal component analysis and two-level clustering. Remote Sens. 2024, 16, 1861. [Google Scholar] [CrossRef]
- Moradi, S.; Moallem, P.; Sabahi, M.F. Fast and robust small infrared target detection using absolute directional mean difference algorithm-ScienceDirect. Signal Process. 2018, 177, 107727. [Google Scholar] [CrossRef]
- Liu, J.; He, Z.; Chen, Z.; Shao, L. Tiny and dim infrared target detection based on weighted local contrast. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1780–1784. [Google Scholar] [CrossRef]
- Shang, K.; Sun, X.; Tian, J.; Li, Y.; Ma, J. Infrared small target detection via line-based reconstruction and entropy-induced suppression. Infrared Phys. Technol. 2016, 76, 75–81. [Google Scholar] [CrossRef]
- Xia, C.; Li, X.; Zhao, L.; Shu, R. Infrared small target detection based on multiscale local contrast measure using local energy factor. IEEE Geosci. Remote Sens. Lett. 2019, 17, 157–161. [Google Scholar] [CrossRef]
- Deng, H.; Sun, X.; Liu, M.; Ye, C.; Zhou, X. Small infrared target detection based on weighted local difference measure. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4204–4214. [Google Scholar] [CrossRef]
- Han, J.; Moradi, S.; Faramarzi, I.; Liu, C.; Zhang, H.; Zhao, Q. A local contrast method for infrared small-target detection utilizing a tri-layer window. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1822–1826. [Google Scholar] [CrossRef]
- Zhang, T.; Peng, Z.; Wu, H.; He, Y.; Li, C.; Yang, C. Infrared small target detection via self-regularized weighted sparse model. Neurocomputing 2021, 420, 124–148. [Google Scholar] [CrossRef]
- Liu, T.; Yang, J.; Li, B.; Xiao, C.; Sun, Y.; Wang, Y.; An, W. Nonconvex tensor low-rank approximation for infrared small target detection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5614718. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, J.; An, W. Infrared dim and small target detection via multiple subspace learning and spatial-temporal patch-tensor model. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3737–3752. [Google Scholar] [CrossRef]
- Liu, T.; Yang, J.; Li, B.; Wang, Y.; An, W. Infrared small target detection via nonconvex tensor tucker decomposition with factor prior. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5617317. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Resolution | Target Size | Contrast | Scene Description | |
|---|---|---|---|---|
| Group1 | 127 × 127 | 3 × 3 | 38% | Complex background |
| Group2 | 127 × 127 | 3 × 2 | 10% | Strong edge |
| Group3 | 250 × 250 | 3 × 3 | 8% | Weak contrast |
| Group4 | 250 × 250 | 3 × 3 | 16% | Building scene |
| Group5 | 300 × 210 | 3 × 3 | 15% | Strong light |
| Group6 | 356 × 225 | 3 × 3 | 13% | Similar background |
| Contrast | Metrics | MPCM [27] | ADMD [40] | AMW LCM [41] | LR [42] | RLCM [28] | DDLCM | |
|---|---|---|---|---|---|---|---|---|
| Ground1 | 38% | SCRG | 7.457 | 6.136 | 8.079 | 15.504 | 6.651 | 50.881 |
| BSF | 2.344 | 2.946 | 2.138 | 4.664 | 2.820 | 47.828 | ||
| Ground2 | 10% | SCRG | 18.960 | 9.960 | 10.625 | 13.238 | 0.244 | 261.060 |
| BSF | 4.521 | 4.165 | 2.871 | 2.777 | 1.350 | 171.508 | ||
| Ground3 | 8% | SCRG | 0.351 | 10.751 | 1.089 | 0.253 | 4.757 | 62.847 |
| BSF | 4.889 | 20.197 | 2.697 | 1.936 | 4.345 | 189.073 | ||
| Ground4 | 16% | SCRG | 16.590 | 41.354 | 14.752 | 3.064 | 124.790 | 164.810 |
| BSF | 8.924 | 25.256 | 2.313 | 3.285 | 3.953 | 53.696 | ||
| Ground5 | 15% | SCRG | 211.222 | 507.782 | 6.043 | 23.323 | 0.792 | 1233.920 |
| BSF | 127.922 | 279.011 | 4.481 | 14.535 | 15.514 | 1861.988 | ||
| Ground6 | 13% | SCRG | 108.524 | 146.226 | 29.566 | 56.156 | 30.243 | 159.320 |
| BSF | 64.543 | 84.047 | 11.481 | 35.051 | 5.803 | 214.363 |
| SF | DLCM | DNSM | F1-Score↑ | AUC↑ | Time(s)↓ | |
|---|---|---|---|---|---|---|
| Exp. 1 | ✔ | 0.707 | 0.762 | 0.0816 | ||
| Exp. 2 | ✔ | ✔ | 0.853 | 0.894 | 0.0784 | |
| Exp. 3 | ✔ | ✔ | 0.857 | 0.878 | 0.1022 | |
| Exp. 4 | ✔ | ✔ | ✔ | 0.879 | 0.913 | 0.0828 |
| LEF [43] | WLDM [44] | TLL-CM [45] | LR | SRWS [46] | ASTTV-NTLA [47] | MSL-STIPT [48] | NFTD-GSTV [49] | DDLCM | |
|---|---|---|---|---|---|---|---|---|---|
| Prec | 0.8265 | 0.7273 | 0.7890 | 0.6606 | 0.8529 | 0.7750 | 0.7013 | 0.6200 | 0.8878 |
| Rec | 0.81 | 0.64 | 0.86 | 0.72 | 0.29 | 0.31 | 0.5400 | 0.3100 | 0.87 |
| AUC | 0.8300 | 0.7073 | 0.8454 | 0.6981 | 0.6415 | 0.611 | 0.6521 | 0.5620 | 0.9125 |
| F1-score | 0.8182 | 0.6809 | 0.8230 | 0.6890 | 0.4496 | 0.4429 | 0.6102 | 0.4133 | 0.8788 |
| Time(s) | 7.2707 | 4.3280 | 1.9094 | 0.0938 | 1.3147 | 2.2336 | 3.9574 | 1.9190 | 0.0828 |
| LEF | WLDM | TLLCM | LR | SRWS | ASTTV-NTLA | MSL-STIPT | NFTD-GSTV | DDLCM | |
|---|---|---|---|---|---|---|---|---|---|
| Prec | 0.7632 | 0.6535 | 0.8586 | 0.5774 | 0.7710 | 0.7286 | 0.5678 | 0.6421 | 0.7586 |
| Rec | 0.2197 | 0.2500 | 0.3220 | 0.5795 | 0.3826 | 0.5492 | 0.2538 | 0.2311 | 0.7500 |
| AUC | 0.5800 | 0.5671 | 0.6394 | 0.6786 | 0.6551 | 0.7009 | 0.5078 | 0.5404 | 0.8600 |
| F1-score | 0.3412 | 0.3616 | 0.4683 | 0.5784 | 0.5114 | 0.6263 | 0.3508 | 0.3398 | 0.7543 |
| Dataset | LEF | WLDM | TLLCM | LR | SRWS | ASTTV-NTLA | MSL-STIPT | NFTD-GSTV | |
|---|---|---|---|---|---|---|---|---|---|
| Time | 5.2058 | 2.8968 | 1.6746 | 0.092 | 0.9963 | 1.1912 | 3.4663 | 0.9383 | |
| IRWS | RI | 28.40% | 33.07% | 12.30% | 1.92% | 24.22% | 46.67% | 12.41% | 51.10% |
| AUC-VR | −2.4% | −2.64% | −12.20% | −0.53% | 43.96% | 2.83% | −9.26% | −23.9% | |
| Time | 4.3637 | 2.7036 | 1.5956 | 0.0771 | 0.4213 | 1.2917 | 3.4508 | 0.9874 | |
| SIRS-AUG | RI | 44.38% | 38.53% | 14.62% | 17.98% | 73.95% | 57.91% | 14.39% | 57.01% |
| AUC-VR | 0.0% | 8.12% | −2.42% | 7.80% | 1.74% | −22.0% | 0.77% | −10.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, J.; Chen, W.; Guo, B.; Yan, Y. Infrared Weak Target Detection in Dual Images and Dual Areas. Remote Sens. 2024, 16, 3608. https://doi.org/10.3390/rs16193608
Zhuang J, Chen W, Guo B, Yan Y. Infrared Weak Target Detection in Dual Images and Dual Areas. Remote Sensing. 2024; 16(19):3608. https://doi.org/10.3390/rs16193608
Chicago/Turabian StyleZhuang, Junbin, Wenying Chen, Baolong Guo, and Yunyi Yan. 2024. "Infrared Weak Target Detection in Dual Images and Dual Areas" Remote Sensing 16, no. 19: 3608. https://doi.org/10.3390/rs16193608
APA StyleZhuang, J., Chen, W., Guo, B., & Yan, Y. (2024). Infrared Weak Target Detection in Dual Images and Dual Areas. Remote Sensing, 16(19), 3608. https://doi.org/10.3390/rs16193608