


Assessing the Potential of UAV for Large-Scale Fractional Vegetation Cover Mapping with Satellite Data and Machine Learning

Abstract
1. Introduction
2. Materials and Methods
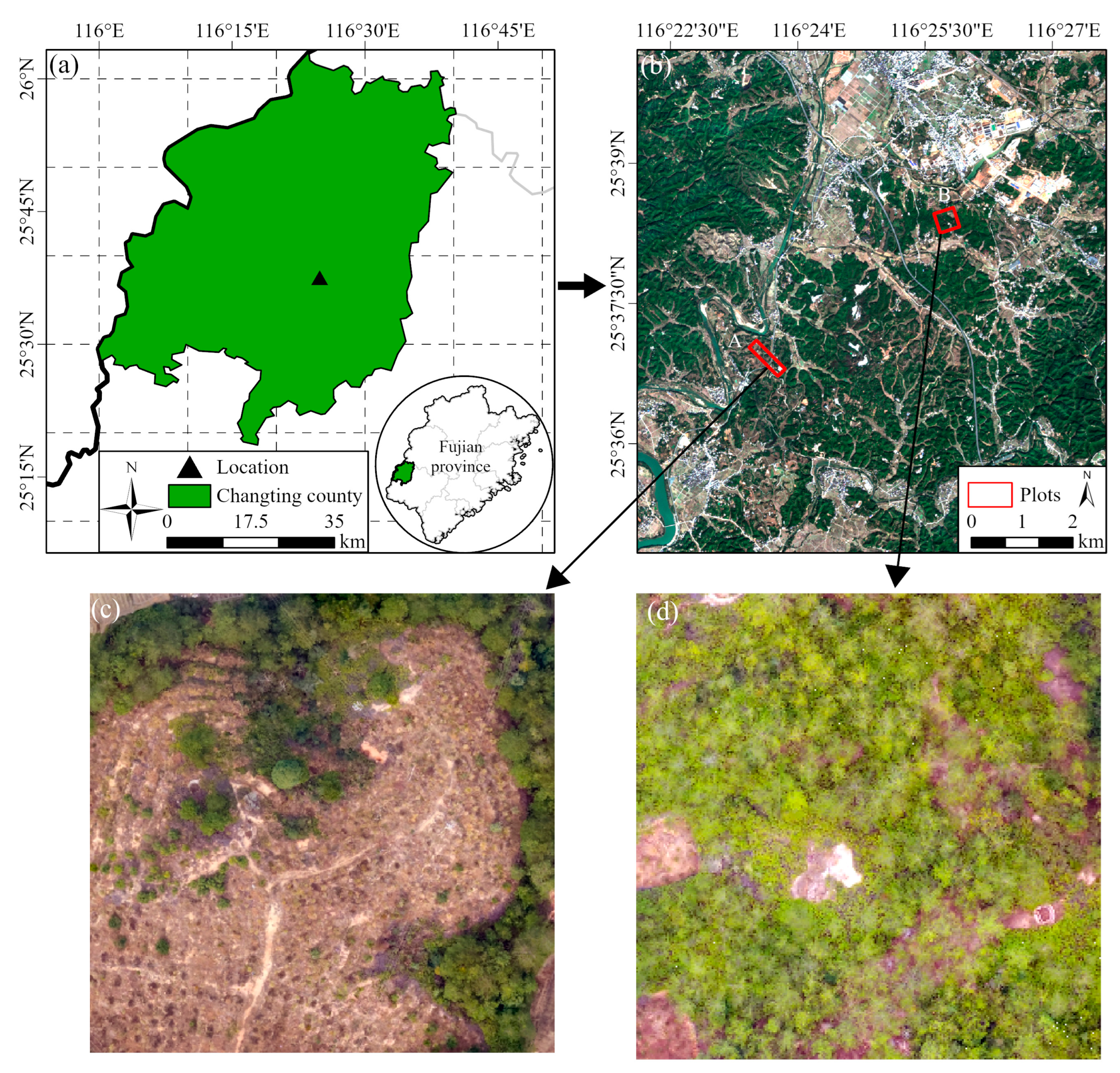
2.1. Study Area
2.2. Data Collection and Preprocessing
2.2.1. UAV Image Acquisition and Pre-Processing
2.2.2. Satellite Image Acquisition and Pre-Processing
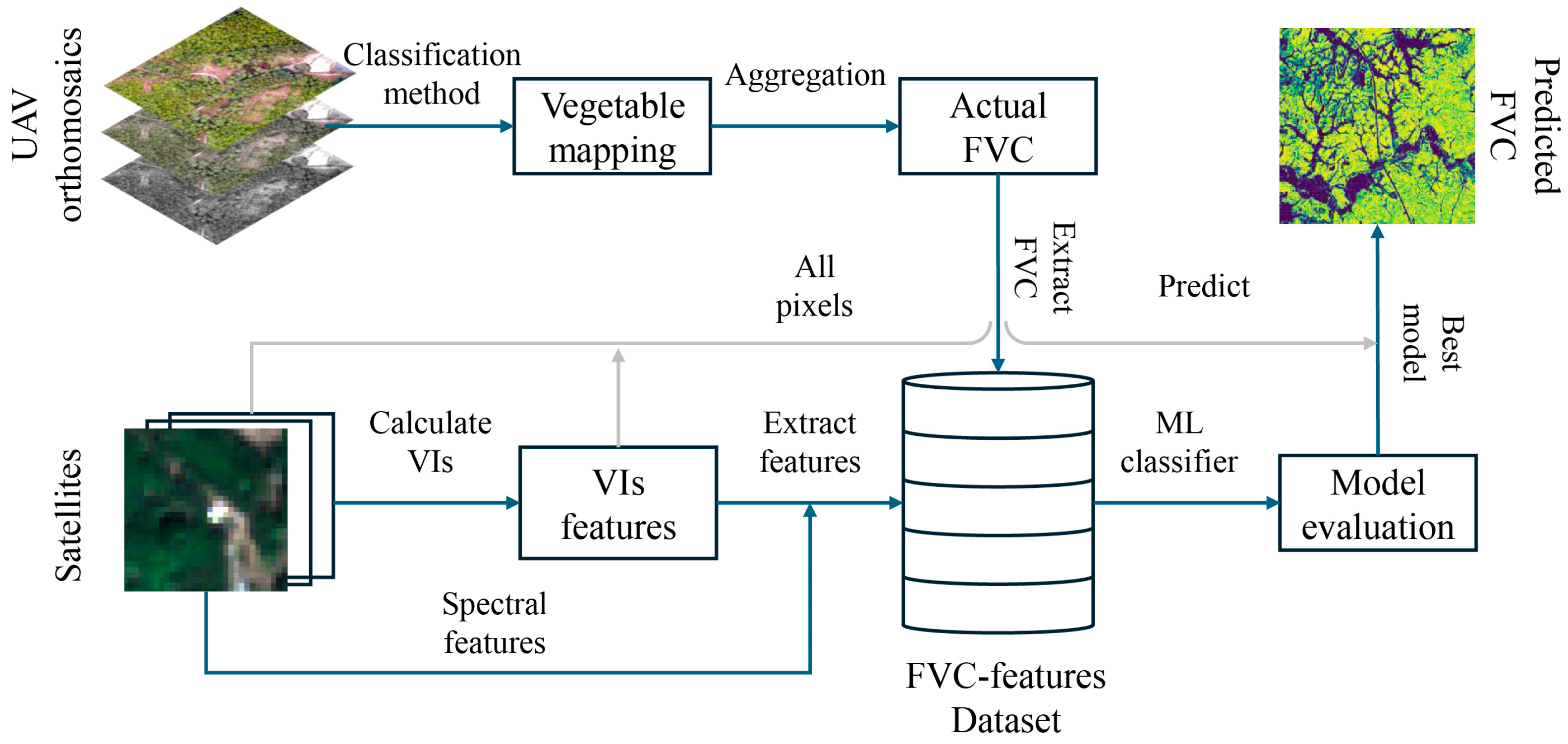
2.3. Methodology
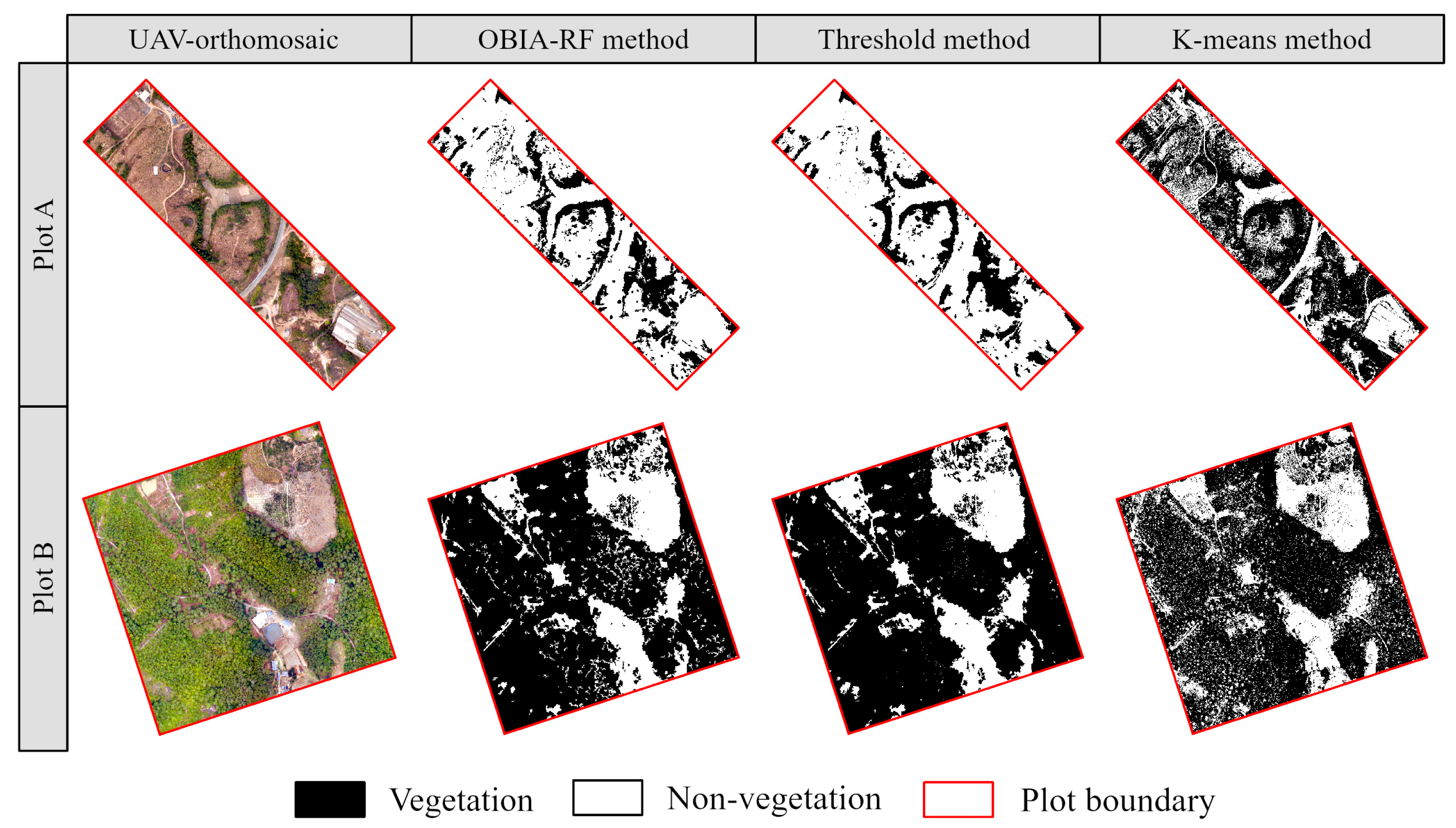
2.3.1. Binary Classification Based on UAV Images
2.3.2. Constructing FVC with VIs and Band Value Datasets
2.3.3. Satellite-Scale FVC Modeling and Accuracy Evaluation
2.3.4. SHapley Additive exPlanation (SHAP) for FVC Model Interpretation
3. Results
3.1. Classification of UAV-Orthomosaic
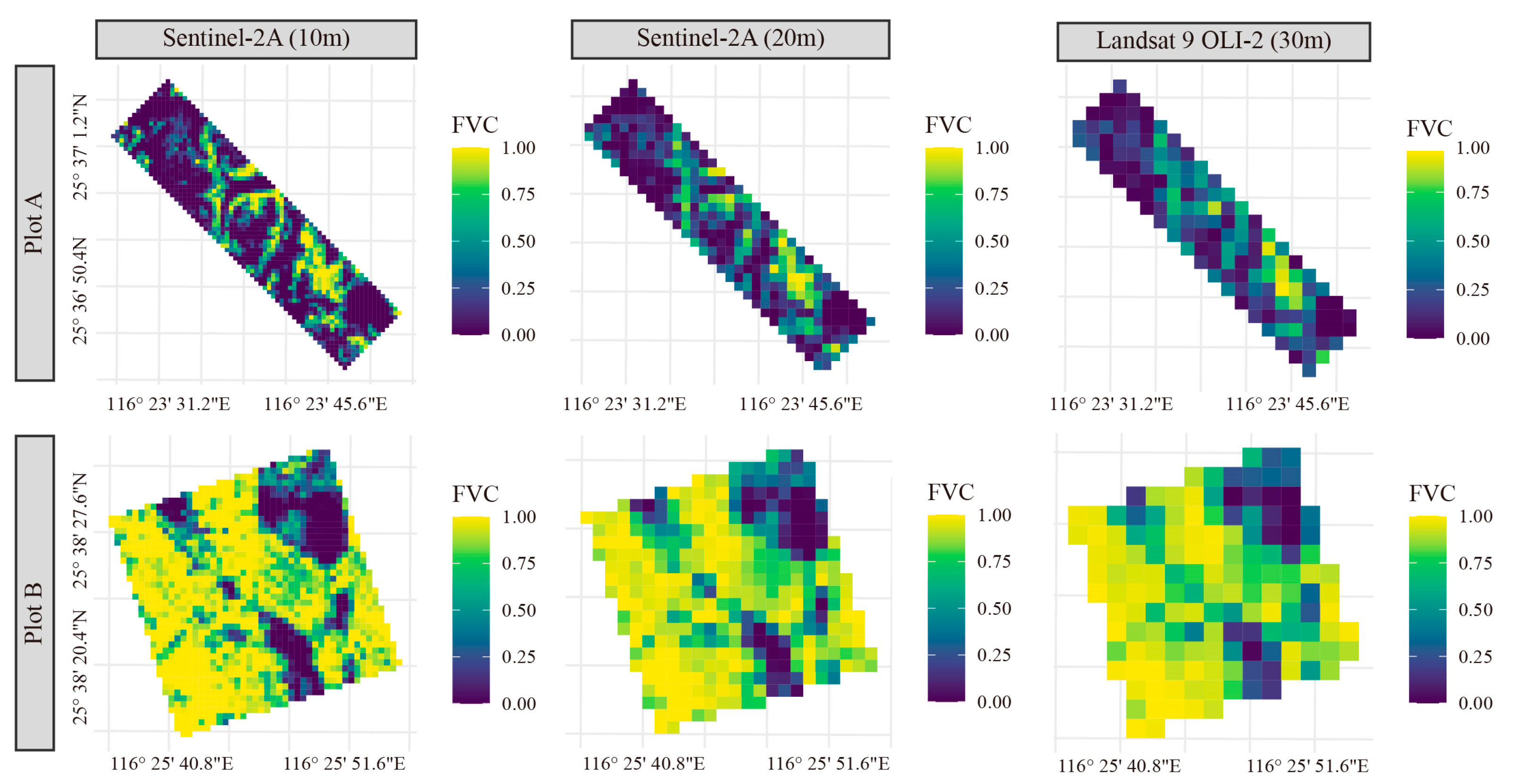
3.2. FVC Upscaling Based on UAV Classification Results
3.3. Constructing FVC Estimation Models
3.4. Uncertainty of Optimal FVC Model
4. Discussion
4.1. Mapping Vegetation on the UAV Scale
4.2. FVC Was Upscaled from UAV to the Sentinel Scale
4.3. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, S.; Deng, L.; Zhai, J.; Lu, Z.; Wu, Y.; Chen, Y.; Guo, L.; Gao, H. Approach for Monitoring Spatiotemporal Changes in Fractional Vegetation Cover Through Unmanned Aerial System-Guided-Satellite Survey: A Case Study in Mining Area. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 5502–5513. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, J.; Tan, M.L.; Lu, P.; Xue, Z.; Liu, M.; Wang, X. Impacts of Vegetation Restoration on Soil Erosion in the Yellow River Basin, China. Catena 2024, 234, 107547. [Google Scholar] [CrossRef]
- Yan, K.; Gao, S.; Chi, H.; Qi, J.; Song, W.; Tong, Y.; Mu, X.; Yan, G. Evaluation of the Vegetation-Index-Based Dimidiate Pixel Model for Fractional Vegetation Cover Estimation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Yang, S.; Li, S.; Zhang, B.; Yu, R.; Li, C.; Hu, J.; Liu, S.; Cheng, E.; Lou, Z.; Peng, D. Accurate Estimation of Fractional Vegetation Cover for Winter Wheat by Integrated Unmanned Aerial Systems and Satellite Images. Front. Plant Sci. 2023, 14, 1220137. [Google Scholar] [CrossRef]
- Zhang, Z. Stand Density Estimation Based on Fractional Vegetation Coverage from Sentinel-2 Satellite Imagery. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102760. [Google Scholar] [CrossRef]
- Bian, J.; Li, A.; Zhang, Z.; Zhao, W.; Lei, G.; Yin, G.; Jin, H.; Tan, J.; Huang, C. Monitoring Fractional Green Vegetation Cover Dynamics over a Seasonally Inundated Alpine Wetland Using Dense Time Series HJ-1A/B Constellation Images and an Adaptive Endmember Selection LSMM Model. Remote Sens. Environ. 2017, 197, 98–114. [Google Scholar] [CrossRef]
- Riihimäki, H.; Luoto, M.; Heiskanen, J. Estimating Fractional Cover of Tundra Vegetation at Multiple Scales Using Unmanned Aerial Systems and Optical Satellite Data. Remote Sens. Environ. 2019, 224, 119–132. [Google Scholar] [CrossRef]
- Melville, B.; Fisher, A.; Lucieer, A. Ultra-High Spatial Resolution Fractional Vegetation Cover from Unmanned Aerial Multispectral Imagery. Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 14–24. [Google Scholar] [CrossRef]
- Maurya, A.K.; Nadeem, M.; Singh, D.; Singh, K.P.; Rajput, N.S. Critical Analysis of Machine Learning Approaches for Vegetation Fractional Cover Estimation Using Drone and Sentinel-2 Data. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 343–346. [Google Scholar]
- Niu, Y.; Han, W.; Zhang, H.; Zhang, L.; Chen, H. Estimating Fractional Vegetation Cover of Maize under Water Stress from UAV Multispectral Imagery Using Machine Learning Algorithms. Comput. Electron. Agric. 2021, 189, 106414. [Google Scholar] [CrossRef]
- Wang, Q.; Moreno-Martínez, Á.; Muñoz-Marí, J.; Campos-Taberner, M.; Camps-Valls, G. Estimation of Vegetation Traits with Kernel NDVI. ISPRS J. Photogramm. Remote Sens. 2023, 195, 408–417. [Google Scholar] [CrossRef]
- Ye, Z.; Yang, K.; Lin, Y.; Guo, S.; Sun, Y.; Chen, X.; Lai, R.; Zhang, H. A Comparison between Pixel-Based Deep Learning and Object-Based Image Analysis (OBIA) for Individual Detection of Cabbage Plants Based on UAV Visible-Light Images. Comput. Electron. Agric. 2023, 209, 107822. [Google Scholar] [CrossRef]
- Kattenborn, T.; Lopatin, J.; Förster, M.; Braun, A.C.; Fassnacht, F.E. UAV Data as Alternative to Field Sampling to Map Woody Invasive Species Based on Combined Sentinel-1 and Sentinel-2 Data. Remote Sens. Environ. 2019, 227, 61–73. [Google Scholar] [CrossRef]
- Gränzig, T.; Fassnacht, F.E.; Kleinschmit, B.; Förster, M. Mapping the Fractional Coverage of the Invasive Shrub Ulex Europaeus with Multi-Temporal Sentinel-2 Imagery Utilizing UAV Orthoimages and a New Spatial Optimization Approach. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102281. [Google Scholar] [CrossRef]
- Lu, L.; Luo, J.; Xin, Y.; Duan, H.; Sun, Z.; Qiu, Y.; Xiao, Q. How Can UAV Contribute in Satellite-Based Phragmites Australis Aboveground Biomass Estimating? Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103024. [Google Scholar] [CrossRef]
- Mao, P.; Ding, J.; Jiang, B.; Qin, L.; Qiu, G.Y. How Can UAV Bridge the Gap between Ground and Satellite Observations for Quantifying the Biomass of Desert Shrub Community? ISPRS J. Photogramm. Remote Sens. 2022, 192, 361–376. [Google Scholar] [CrossRef]
- Lin, C.; Zhou, S.-L.; Wu, S.-H.; Liao, F.-Q. Relationships Between Intensity Gradation and Evolution of Soil Erosion: A Case Study of Changting in Fujian Province, China. Pedosphere 2012, 22, 243–253. [Google Scholar] [CrossRef]
- Liu, L.; Xiao, X.; Qin, Y.; Wang, J.; Xu, X.; Hu, Y.; Qiao, Z. Mapping Cropping Intensity in China Using Time Series Landsat and Sentinel-2 Images and Google Earth Engine. Remote Sens. Environ. 2020, 239, 111624. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Chen, A.; Xu, C.; Zhang, M.; Guo, J.; Xing, X.; Yang, D.; Xu, B.; Yang, X. Cross-Scale Mapping of above-Ground Biomass and Shrub Dominance by Integrating UAV and Satellite Data in Temperate Grassland. Remote Sens. Environ. 2024, 304, 114024. [Google Scholar] [CrossRef]
- Birth, G.S.; McVey, G.R. Measuring the Color of Growing Turf with a Reflectance Spectrophotometer1. Agron. J. 1968, 60, 640–643. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the Radiometric and Biophysical Performance of the MODIS Vegetation Indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Zeng, Y.; Hao, D.; Huete, A.; Dechant, B.; Berry, J.; Chen, J.M.; Joiner, J.; Frankenberg, C.; Bond-Lamberty, B.; Ryu, Y.; et al. Optical Vegetation Indices for Monitoring Terrestrial Ecosystems Globally. Nat. Rev. Earth Environ. 2022, 3, 477–493. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Quantitative Estimation of Chlorophyll-a Using Reflectance Spectra: Experiments with Autumn Chestnut and Maple Leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; ROCK, B.N.; MOSS, D.M. Red Edge Spectral Measurements from Sugar Maple Leaves. Int. J. Remote Sens. 1993, 14, 1563–1575. [Google Scholar] [CrossRef]
- Fernandes, R.; Butson, C.; Leblanc, S.; Latifovic, R. Landsat-5 TM and Landsat-7 ETM+ Based Accuracy Assessment of Leaf Area Index Products for Canada Derived from SPOT-4 VEGETATION Data. Can. J. Remote Sens. 2003, 29, 241–258. [Google Scholar] [CrossRef]
- Gao, B. NDWI—A Normalized Difference Water Index for Remote Sensing of Vegetation Liquid Water from Space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, J.; Guo, S.; Ye, Z.; Deng, H.; Hou, X.; Zhang, H. Urban Tree Classification Based on Object-Oriented Approach and Random Forest Algorithm Using Unmanned Aerial Vehicle (UAV) Multispectral Imagery. Remote Sens. 2022, 14, 3885. [Google Scholar] [CrossRef]
- Li, L.; Mu, X.; Jiang, H.; Chianucci, F.; Hu, R.; Song, W.; Qi, J.; Liu, S.; Zhou, J.; Chen, L.; et al. Review of Ground and Aerial Methods for Vegetation Cover Fraction (fCover) and Related Quantities Estimation: Definitions, Advances, Challenges, and Future Perspectives. ISPRS J. Photogramm. Remote Sens. 2023, 199, 133–156. [Google Scholar] [CrossRef]
- Fu, B.; Zuo, P.; Liu, M.; Lan, G.; He, H.; Lao, Z.; Zhang, Y.; Fan, D.; Gao, E. Classifying Vegetation Communities Karst Wetland Synergistic Use of Image Fusion and Object-Based Machine Learning Algorithm with Jilin-1 and UAV Multispectral Images. Ecol. Indic. 2022, 140, 108989. [Google Scholar] [CrossRef]
- Zhou, H.; Fu, L.; Sharma, R.P.; Lei, Y.; Guo, J. A Hybrid Approach of Combining Random Forest with Texture Analysis and VDVI for Desert Vegetation Mapping Based on UAV RGB Data. Remote Sens. 2021, 13, 1891. [Google Scholar] [CrossRef]
- Rehman, T.U.; Mahmud, M.S.; Chang, Y.K.; Jin, J.; Shin, J. Current and Future Applications of Statistical Machine Learning Algorithms for Agricultural Machine Vision Systems. Comput. Electron. Agric. 2019, 156, 585–605. [Google Scholar] [CrossRef]
- Li, S.; Jiang, B.; Liang, S.; Peng, J.; Liang, H.; Han, J.; Yin, X.; Yao, Y.; Zhang, X.; Cheng, J.; et al. Evaluation of Nine Machine Learning Methods for Estimating Daily Land Surface Radiation Budget from MODIS Satellite Data. Int. J. Digit. Earth 2022, 15, 1784–1816. [Google Scholar] [CrossRef]
- Du, Z.; Sun, X.; Zheng, S.; Wang, S.; Wu, L.; An, Y.; Luo, Y. Optimal biochar selection for cadmium pollution remediation in Chinese agricultural soils via optimized machine learning. J. Hazard. Mater. 2024, 476, 135065. [Google Scholar] [CrossRef] [PubMed]
- Minh, D.; Wang, H.X.; Li, Y.F.; Nguyen, T.N. Explainable Artificial Intelligence: A Comprehensive Review. Artif. Intell. Rev. 2022, 55, 3503–3568. [Google Scholar] [CrossRef]
- Fu, B.; Liu, M.; He, H.; Lan, F.; He, X.; Liu, L.; Huang, L.; Fan, D.; Zhao, M.; Jia, Z. Comparison of Optimized Object-Based RF-DT Algorithm and SegNet Algorithm for Classifying Karst Wetland Vegetation Communities Using Ultra-High Spatial Resolution UAV Data. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102553. [Google Scholar] [CrossRef]
- Deng, H.; Liu, K.; Feng, J. Understanding the Impact of Modifiable Areal Unit Problem on Urban Vitality and Its Built Environment Factors. Geo-Spat. Inf. Sci. 2024, 1–17. [Google Scholar] [CrossRef]
- Peng, D.; Wang, Y.; Xian, G.; Huete, A.R.; Huang, W.; Shen, M.; Wang, F.; Yu, L.; Liu, L.; Xie, Q.; et al. Investigation of Land Surface Phenology Detections in Shrublands Using Multiple Scale Satellite Data. Remote Sens. Environ. 2021, 252, 112133. [Google Scholar] [CrossRef]
- Gonsamo, A.; Chen, J.M. Spectral Response Function Comparability Among 21 Satellite Sensors for Vegetation Monitoring. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1319–1335. [Google Scholar] [CrossRef]
- Singha, C. Integrating Geospatial, Remote Sensing, and Machine Learning for Climate-Induced Forest Fire Susceptibility Mapping in Similipal Tiger Reserve, India. For. Ecol. Manag. 2024, 555, 121729. [Google Scholar] [CrossRef]
- Zhao, C.; Jia, M.; Wang, Z.; Mao, D.; Wang, Y. Identifying Mangroves through Knowledge Extracted from Trained Random Forest Models: An Interpretable Mangrove Mapping Approach (IMMA). ISPRS J. Photogramm. Remote Sens. 2023, 201, 209–225. [Google Scholar] [CrossRef]
- Alerskans, E.; Zinck, A.-S.P.; Nielsen-Englyst, P.; Høyer, J.L. Exploring Machine Learning Techniques to Retrieve Sea Surface Temperatures from Passive Microwave Measurements. Remote Sens. Environ. 2022, 281, 113220. [Google Scholar] [CrossRef]
- Wei, L.; Yang, H.; Niu, Y.; Zhang, Y.; Xu, L.; Chai, X. Wheat Biomass, Yield, and Straw-Grain Ratio Estimation from Multi-Temporal UAV-Based RGB and Multispectral Images. Biosyst. Eng. 2023, 234, 187–205. [Google Scholar] [CrossRef]
- Putkiranta, P.; Räsänen, A.; Korpelainen, P.; Erlandsson, R.; Kolari, T.H.M.; Pang, Y.; Villoslada, M.; Wolff, F.; Kumpula, T.; Virtanen, T. The Value of Hyperspectral UAV Imagery in Characterizing Tundra Vegetation. Remote Sens. Environ. 2024, 308, 114175. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel-2A (10 m) | Sentinel-2A (20 m) | Landsat 9 OLI-2 (30 m) | |||
|---|---|---|---|---|---|
| Band Name | Bandwidth (nm) | Band Name | Bandwidth (nm) | Band Name | Bandwidth (nm) |
| Blue | 458–523 | Blue | 458–523 | Blue | 450–515 |
| Green | 543–578 | Green | 543–578 | Green | 525–600 |
| Red | 543–578 | Red | 543–578 | Red | 630–680 |
| NIR | 785–900 | NIR | 785–900 | NIR | 845–885 |
| Red edge-1 | 697–711 | SWIR-1 | 1560–1660 | ||
| Red edge-2 | 733–748 | SWIR-2 | 2100–2300 | ||
| Red edge-3 | 773–793 | ||||
| SWIR-1 | 1565–1655 | ||||
| SWIR-2 | 2100–2280 | ||||
| Index | Formula | Reference | Satellite | ||
|---|---|---|---|---|---|
| S2-10 | S2-20 | L9-30 | |||
| SR | [21] | ✔ | ✔ | ✔ | |
| NDVI | [7] | ✔ | ✔ | ✔ | |
| EVI | [22] | ✔ | ✔ | ✔ | |
| SAVI | [23] | ✔ | ✔ | ✔ | |
| MASVI | [24] | ✔ | ✔ | ✔ | |
| kNDVI | [11] | ✔ | ✔ | ✔ | |
| VREI | [25] | ✔ | |||
| RENDVI | [26] | ✔ | |||
| ISR | [27] | ✔ | ✔ | ||
| NDWI | [28] | ✔ | ✔ | ||
| ML Algorithm | Hyperparameters | Meanings | Search Ranges |
|---|---|---|---|
| KNN | n_neighbors | The number of nearest neighbor samples | 1~20 |
| MLP | hidden_layer_sizes | Number of neurons in the hidden layer | (50,), (50, 50,), (100,) |
| activation | Activation function between hidden layers | [‘identity’, ‘logistic’, ‘tanh’, ‘relu’] | |
| alpha | Coefficients of regularized terms | 0.0001~0.1 | |
| RF | n_estimators | Number of trees in the forest | 1~200 |
| max_depth | Maximum depth of a tree | 1~20 | |
| XGBoost | n_estimators | Number of gradient boosted trees | 1~200 |
| max_depth | Maximum tree depth for base learners | 1~20 | |
| learning_rate | Learning rate for weight updates | 0.01~0.5 | |
| gamma | Minimum loss reduction on a leaf node of the tree | 0~10 | |
| colsample_bytree | Subsample ratio of columns for tree construction | 0.5~1 | |
| subsample | Subsample ratio of training samples | 0.5~1 |
| Methods | Plot A | Plot B | Average | |||
|---|---|---|---|---|---|---|
| Precision | Recall | Precision | Recall | Precision | Recall | |
| OBIA-RF method | 0.897 | 0.929 | 0.915 | 0.929 | 0.906 | 0.929 |
| Threshold method | 0.963 | 0.929 | 0.903 | 0.929 | 0.933 | 0.929 |
| K-means method | 0.431 | 0.893 | 0.789 | 0.643 | 0.610 | 0.768 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Sun, Y.; Qin, X.; Cai, J.; Cai, M.; Hou, X.; Yang, K.; Zhang, H. Assessing the Potential of UAV for Large-Scale Fractional Vegetation Cover Mapping with Satellite Data and Machine Learning. Remote Sens. 2024, 16, 3587. https://doi.org/10.3390/rs16193587
Chen X, Sun Y, Qin X, Cai J, Cai M, Hou X, Yang K, Zhang H. Assessing the Potential of UAV for Large-Scale Fractional Vegetation Cover Mapping with Satellite Data and Machine Learning. Remote Sensing. 2024; 16(19):3587. https://doi.org/10.3390/rs16193587
Chicago/Turabian StyleChen, Xunlong, Yiming Sun, Xinyue Qin, Jianwei Cai, Minghui Cai, Xiaolong Hou, Kaijie Yang, and Houxi Zhang. 2024. "Assessing the Potential of UAV for Large-Scale Fractional Vegetation Cover Mapping with Satellite Data and Machine Learning" Remote Sensing 16, no. 19: 3587. https://doi.org/10.3390/rs16193587
APA StyleChen, X., Sun, Y., Qin, X., Cai, J., Cai, M., Hou, X., Yang, K., & Zhang, H. (2024). Assessing the Potential of UAV for Large-Scale Fractional Vegetation Cover Mapping with Satellite Data and Machine Learning. Remote Sensing, 16(19), 3587. https://doi.org/10.3390/rs16193587