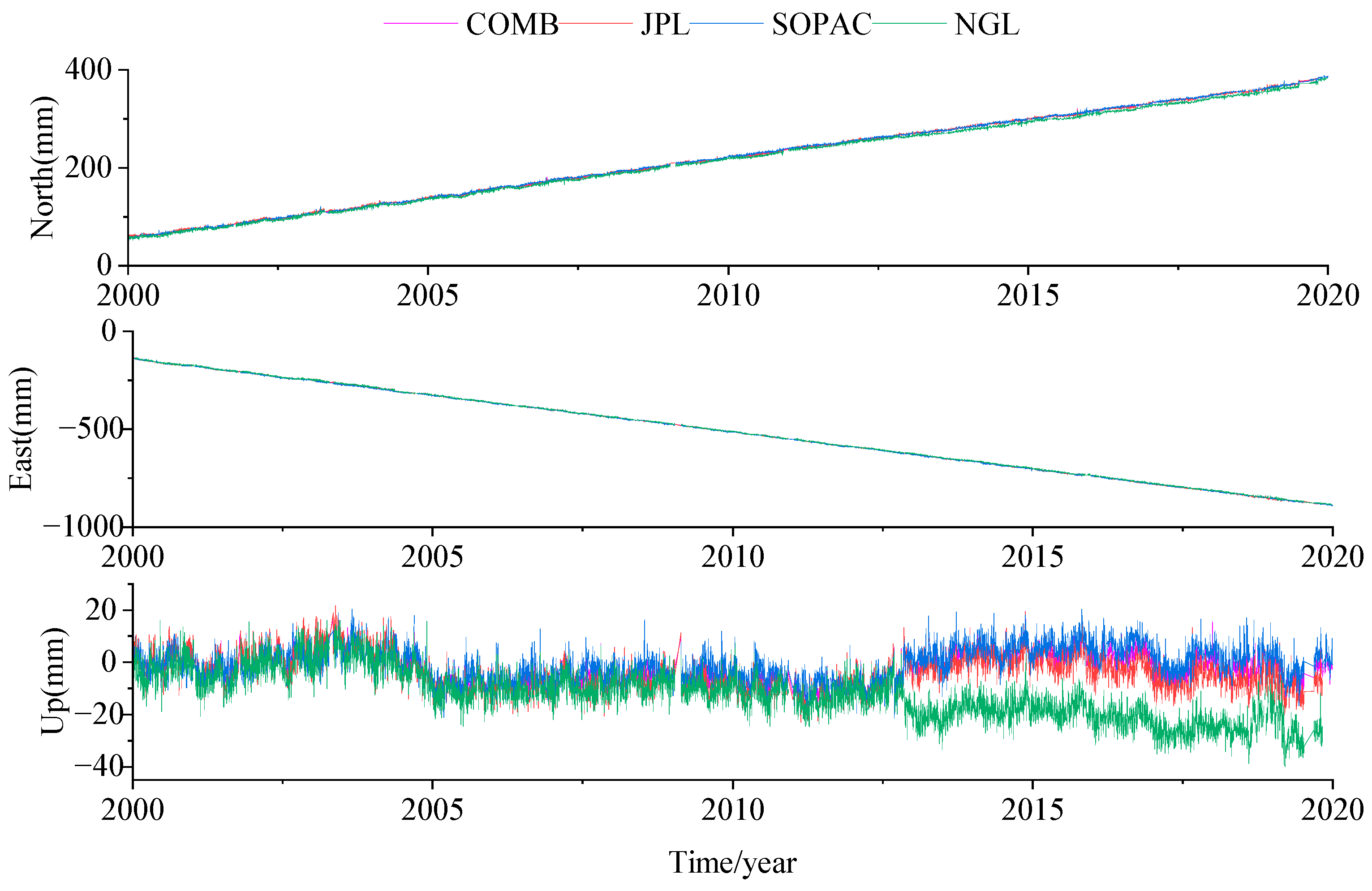
3.1. GNSS Time Series Quality Analysis
Recent studies have shown that the duration of GNSS time series significantly influences noise models. For high-precision geophysical applications, time series longer than 10 years are recommended to mitigate noise effects [
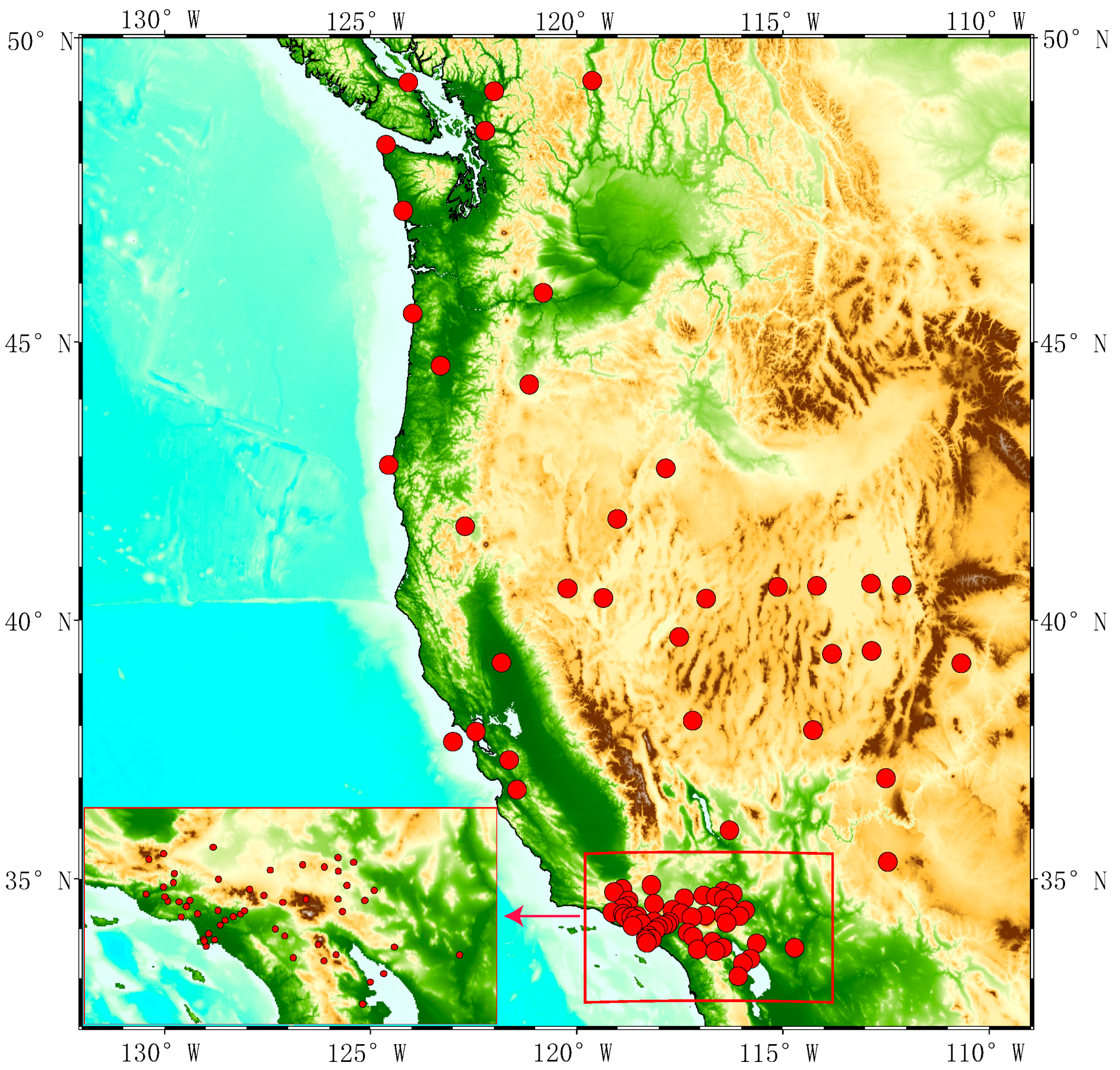
46]. We select data from 87 GNSS stations located on the U.S. West Coast spanning 20 years (2000–2020). The distribution of these stations is illustrated in
Figure 2. Four data products exhibit an average data gap rate below 6%, with the maximum rate not exceeding 10%.
After applying the 3IQR method to remove outliers from the selected data, detrending was performed separately on the E, N, and U components, followed by calculating their RMS values. The RMS values derived from different strategies for analyzing the data exhibit strong consistency, with the average RMS in the E and N components remaining within 3 mm and the RMS in the U component staying below 6 mm. For the aforementioned data, after outlier removal, offsets were detected and corrected individually. The COMB, NGL, and JPL data exhibit a similar total number of offsets, approximately 700 each. In contrast, SOPAC has the smallest total number of offsets, with only 431, possibly due to its adoption of different analysis strategies.
3.2. Geophysical Fluid Loading Effect on GNSS Time Series
GNSS time series exhibit significant seasonal variations, such as annual and semi-annual signals. The global periodic migration of surface loads causes mass redistribution, leading to surface changes. The influence of surface environmental loading introduces biases in the estimation of station displacements and velocities. To enhance the accuracy and reliability of the GNSS coordinate time series, load corrections are required to eliminate the non-tectonic movement variations induced by surface loading.
This study computed the Pearson correlation coefficients [
47] to quantify the relationship between the sum of the non-tidal atmospheric loading (NTAL), non-tidal oceanic loading (NTOL), hydrological loading (HYDL), and GNSS time series from different analysis strategies. The correlation coefficients between the sum of loading components and the E component are approximately 0.65 for all four datasets. In the N and U components, the correlation coefficients are approximately 0.4. This indicates a correlation between the environmental loading series and GNSS time series, implying that the environmental loading series chosen in this study can be used to correct mass loading effects.
Table 2 demonstrates significant changes in RMS values [
48] before and after environmental loading correction. For the COMB and NGL datasets, over 70% of data in the E, N, and U components exhibit reduced RMS values post-correction. Environmental loading primarily affects the E and N components of JPL data, with over 90% of time series showing reduced RMS values, while the U component exhibits a reduction in RMS values for 42% of its time series. In the SOPAC data, 90% of the U component exhibits reduced RMS values, whereas less than 50% of the E and N components show reduced RMS values.
The impact of environmental loading on RMS values was further investigated by calculating the changes in RMS values after applying loading corrections across different datasets. As can be seen in
Table 3, following loading correction, the RMS values for the E and N components of the SOPAC data and the U component of the JPL data showed minimal changes, while the RMS values decreased by approximately 5% for the other components.
In summary, there is a high correlation between HYDL, NTAL, NTOL, and data from different analysis strategies, implying that the environmental loading series chosen in this study can be used to correct mass loading effects. After loading correction, the RMS values for the majority of time series in these four datasets typically decrease by around 5%.
3.3. CME Effect on GNSS Time Series
Before performing PCA filtering, we used the Regularized Expectation Maximization (RegEM) method to interpolate the GNSS time series [
49]. This approach accounts for the correlation and physical context of the stations, requiring no prior information or reliance on external data models. Instead, it relies solely on the intrinsic characteristics of the data. Dong et al. [
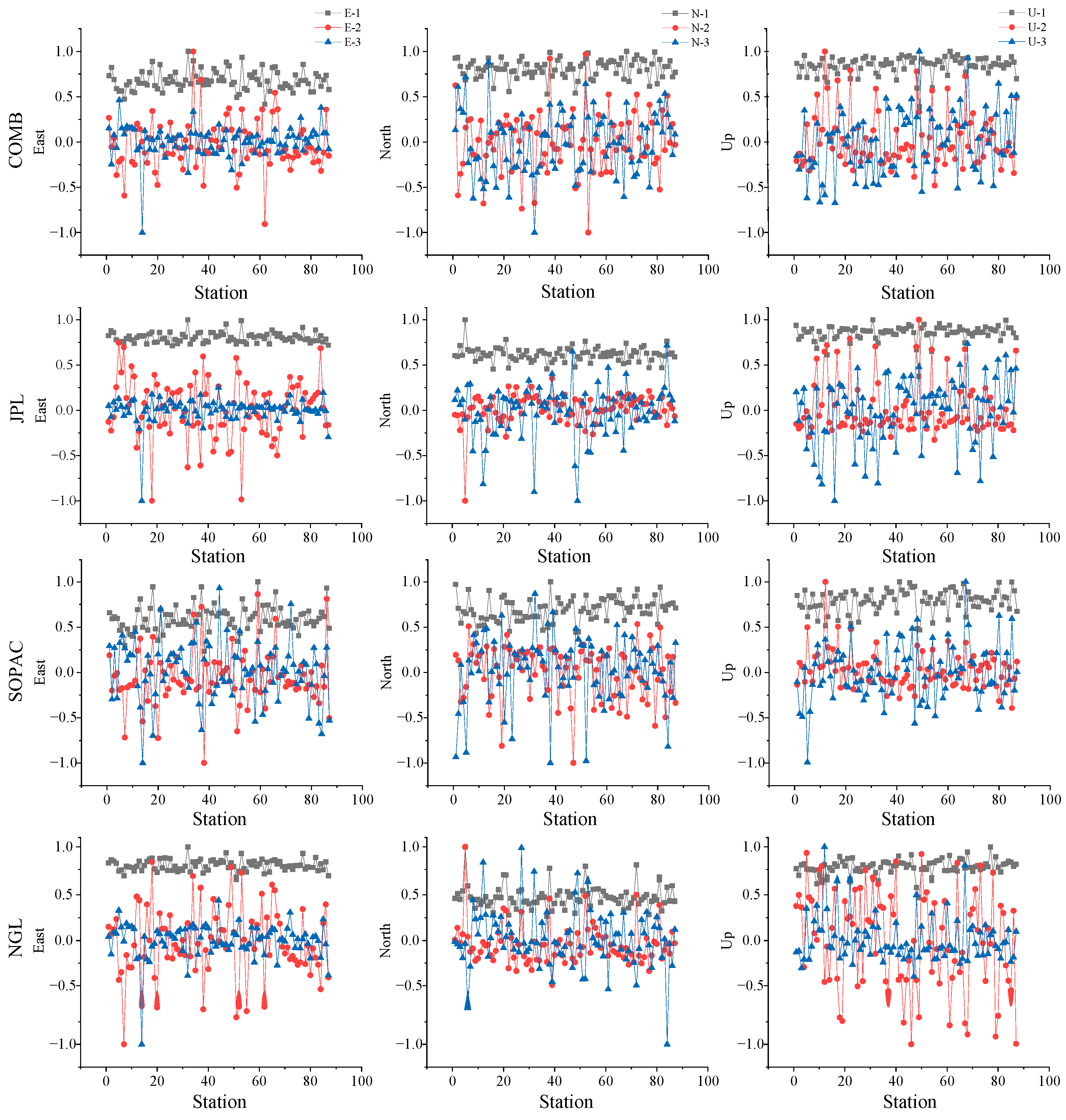
26] defined CMEs as follows: if a principal component (PC) shows significant standardized spatial responses (greater than 0.25) at most stations (more than 50%), and its eigenvalue exceeds 1% of the total sum of eigenvalues, it is considered to exhibit CMEs. Here, we determine the number of PCs with common mode errors based on the proportion of eigenvalues and standardized spatial responses. For the E, N, and U residual time series, filtering is conducted to obtain the percentage of total eigenvalues contributed by each principal component, as well as the standardized spatial responses of the first three PCs for each station’s coordinate time series. Standardized spatial responses are obtained by dividing each station’s spatial response by the maximum spatial response, where positive values indicate a positive spatial response to the principal component and negative values indicate a negative response. This can be seen in
Table 4 and
Figure 3 (ENU componments of the top 3 PCs).
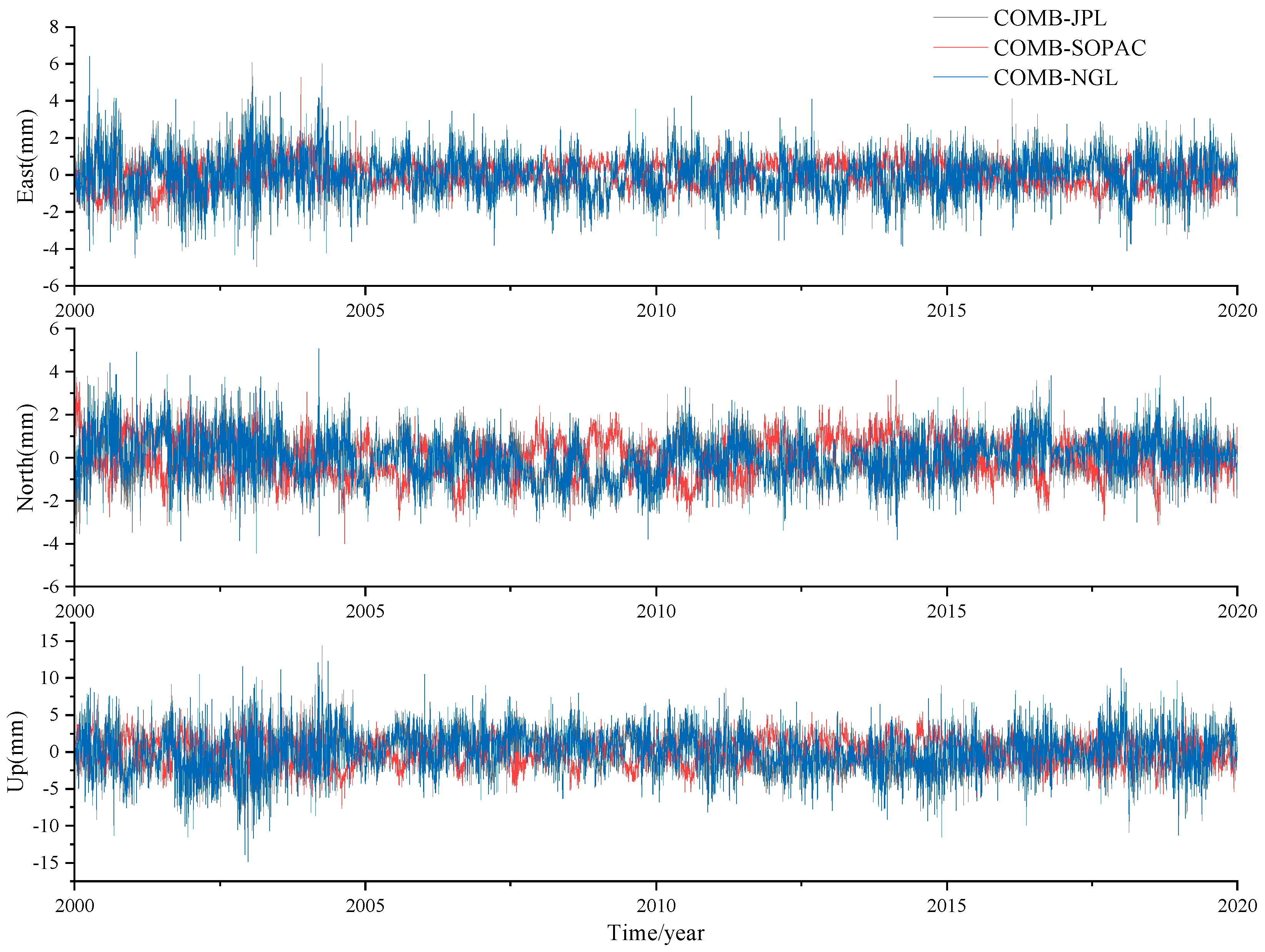
Figure 4 shows the CME difference for the E, N, and U components of the randomly selected CSN1 station in the time domain. The data from different analysis strategies show high consistency across all components, with differences below 5 mm in the E and N components and below 10 mm in the U component. Additionally, the RMS consistency of CME differences across various solution strategies demonstrates strong agreement, with RMS values below 1.5 mm in the E and N components and below 3 mm in the U component.
Further investigation into the relationship between CMEs and data analysis strategies involved computing the correlations between CMEs across different analysis strategies. As shown in
Table 5, there is a high correlation in CMEs between different solution strategies: COMB shows correlations around 0.8 with JPL and SOPAC and around 0.6 with NGL in various components. These findings suggest that CME is often present in GNSS time series, and its occurrence is independent of the data analysis strategy.
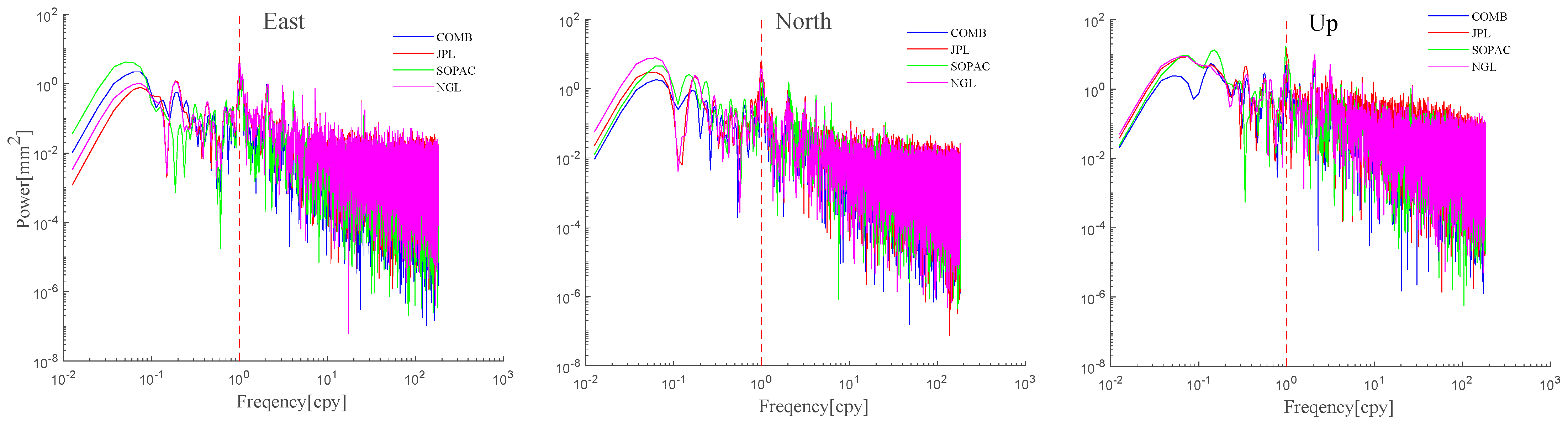
In the frequency domain, spectral analysis was used to detect periodic signals of CMEs across different datasets.
Figure 5 depicts the power spectral density comparisons in the E, N, and U components for the randomly selected CSN1 station. The horizontal axis represents frequency, while the vertical axis represents power density. As shown in
Figure 5, different data analysis strategies exhibit high consistency in the E, N, and U components, showing similar amplitudes of their periodic components. The most significant of these components is the annual term, indicating that CME is one of the primary causes of the seasonal fluctuations observed in GNSS time series.
Extracting and eliminating CMEs enhances the accuracy of regional continuous GNSS time series and deformation mode analysis. The removal of CMEs results in a decrease in the RMS values of all time series in the E, N, and U components across the four datasets. The average correction rate exceeds 20%, indicating that eliminating CMEs effectively reduces the errors in the model parameters of the time series, thereby enhancing the precision of the time series. The RMS values exhibit high consistency after CME removal; the RMS values for the E and N components are below 1.4 mm, while those for the U components are below 3.7 mm across all datasets.
In conclusion, the CME demonstrates a high degree of consistency among data derived from different analysis strategies in both the frequency and time domains, suggesting that the source of CMEs is independent of the data analysis strategy. After removing CMEs, the RMS values decrease across all four datasets with higher consistency, indicating that CMEs occur independently of the analysis strategy and may stem from large-scale atmospheric and hydrospheric effects, small-scale crustal deformations, or other unmodeled errors [
3].
3.4. GNSS Time Series Noise Properties
Previous studies have shown that the noise in GNSS time series significantly impacts the uncertainty of station velocities, resulting in an underestimation when assuming a white noise background [
25,
50,
51]. Overestimating the velocity accuracy in practical applications can lead to using unreliable data as reliable, which fails precision requirements and poses risks in high-precision GNSS applications. GNSS time series exhibit seasonal nonlinear variations, primarily due to uncorrected environmental loading and common mode errors. Correcting for nonlinear signals is essential to obtain the optimal noise model and achieve unbiased estimations of station velocities for time series. Therefore, this study examines the impact of data processing models and analysis strategies on noise characteristics in GNSS coordinate time series by evaluating four noise models: Flicker Noise + White Noise (FN+WN), Generalized Gauss–Markov Noise + White Noise (GGM +WN), Power Law Noise + White Noise (PL+WN), and Random Walk Noise + Flicker Noise + White Noise (RW+FN+WN). This study employs an enhanced Bayesian Information Criterion (BIC_tp) to analyze the noise characteristics of the different time series following load correction and common mode error removal.
Table 6 presents the distribution of optimal models in the E, N, and U components for the data derived from different analysis strategies. In the E and N components, the noise characteristics are generally similar across different datasets. COMB, SOPAC, and NGL exhibit high consistency, with the PL+WN and FN+WN models collectively accounting for approximately 80% of the total, while the RW+FN+WN model accounts for about 20%. In contrast, JPL shows significantly higher proportions of the PL+WN and FN+WN models, totaling up to 90%, while the RW+FN+WN model constitutes less than 10% compared with the other datasets.
Significant differences in noise characteristics are observed between the U component and the E and N components of the data. For the COMB data, there is a decrease in the proportion of the FN+WN and RW+FN+WN models, while the proportion of the PL+WN model increases, with the RW+FN+WN model accounting for only 5.7%. Over 90% of the time series in the JPL data are described by the PL+WN model. The SOPAC and NGL data show a shift in the predominant noise model from PL+WN to FN+WN, accounting for 52.9% and 42.5%, respectively. Moreover, a significant presence of random walk noise was detected in the U component, leading to a substantial increase in the proportion of RW+FN+WN models compared with horizontal components, accounting for 27.6% and 37.9%, respectively.
The diversity and complexity of GNSS noise confirm the presence of both white noise and colored noise in GNSS coordinate time series, meaning that a single noise model is insufficient to accurately describe them. At most stations, the horizontal components show higher consistency in noise models, while vertical components exhibit significant differences among datasets. Hence, in the pursuit of physical explanations for time series variations, it is essential to treat each component differently. The SOPAC and NGL data exhibit substantial RW noise components in various components, with over 20% of time series favoring the RW+FW+NN model as the optimal noise model. Meanwhile, the COMB and JPL datasets predominantly exhibit RW noise in the horizontal component, with RW+FW+NN models accounting for 8–20% of the noise models. This phenomenon may arise from the selection of time series spanning longer time periods, enabling accurate identification of challenging RW noise. The SOPAC and NGL data demonstrate a higher prevalence of RW noise, which can potentially be attributed to variations in data analysis strategies.
This study further explores the impact of different data analysis strategies on noise characteristics by comparing the consistency of the optimal models between COMB and other datasets. As shown in
Table 7, the noise characteristics of data from different analysis strategies demonstrate a high consistency, with the optimal noise models including COMB/JPL, COMB/SOPAC, and COMB/NGL for approximately 50% of the datasets. However, there are still instances of inconsistency in the noise models, indicating that the analysis strategies have an impact on the noise characteristics of the GNSS time series. Therefore, when conducting an unbiased estimation of noise models, it is crucial to consider the noise variations resulting from different analysis strategies and data processing models.
3.5. GNSS Time Series Velocity Analysis
Previous works [
52,
53] show that the International Terrestrial Reference Frame (ITRF) must achieve an accuracy of 0.1 mm/year when providing site coordinates in order to fulfill the stringent requirements of high-precision scientific applications. The determination of station positions and velocities with high accuracy is essential for high-precision GNSS time series applications, offering substantial theoretical and practical value. In this section, within the context of colored noise, we employ the optimal model selected in
Section 3.4 to estimate velocities and their uncertainties from various analysis strategies. We have previously investigated the impact of different analysis strategies on site velocities and their uncertainties by calculating the differences between the COMB and data derived from the JPL, NGL, and SOPAC. Based on the statistical findings presented in
Figure 6, it is observed that a significant majority of stations (80%) exhibit velocity differences below 0.3 mm/year and velocity uncertainty differences below 0.1 mm/year. However, a minority of stations demonstrate velocity differences exceeding 0.5 mm/year, indicating significant deviations in velocity and uncertainty estimates due to varying analysis strategies.
In summary, the analysis strategy and data processing model significantly influence the observed velocities and their uncertainties at stations. In high-precision GNSS applications, overlooking the impact of the analysis strategy can lead to biased estimates of station velocities, thereby posing risks to accuracy and reliability.
3.6. Periodic Signal Analysis of GNSS Time Series
GNSS time series contain numerous periodic non-tectonic signals. Existing research has confirmed the presence of periodic signals with durations of 365, 351, 180, 14, 8, and 5.5 days [
21,
22,
23,
34,
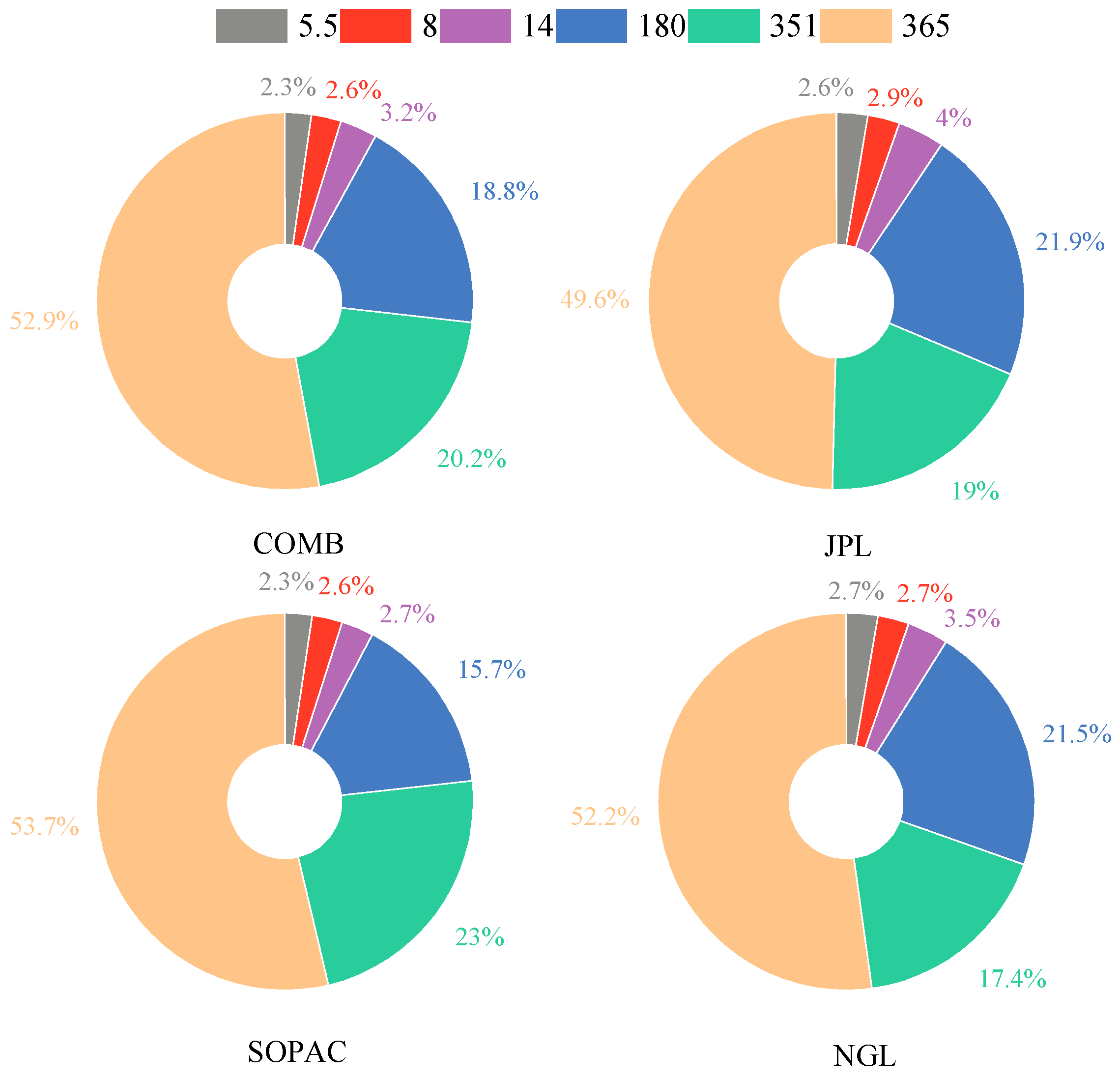
35]. The amplitudes of these periodic signals were calculated from the raw data according to their optimal noise model, and their average amplitudes were normalized to explore the relationship between different periodic signals and analysis strategies. As shown in
Figure 7, there is a high degree of consistency in the normalized average amplitudes of different periodic signals across various analysis strategy datasets. The annual, semi-annual, and draconitic year signals account for approximately 90% of the total amplitude, while the 5.5-, 8-, and 14-day signals only contribute a minor amplitude of about 10%.
The average amplitudes of the periodic signals are calculated from the corrected loading data (see
Section 3.2) to examine their potential association with environmental loading.
Table 8 presents the statistical results of the average amplitude variation rates.
This study found that environmental loading has a significant and consistent impact on annual and semi-annual signals. After load correction, over 80% of the time series in the COMB, JPL, and NGL datasets show a decrease in the amplitudes of their annual and semi-annual signals, with correction rates of approximately −40% for the annual signal and −30% for the semi-annual signal. For SOPAC, 60% of the time series exhibit a decrease in amplitude, with annual and semi-annual signal correction rates of −37% and −11%, respectively. This suggests that environmental loading is a significant factor influencing annual and semi-annual signals, with SOPAC time series showing a decrease in the amplitudes for these signals in only 60% of cases, potentially due to the use of a different load model compared with other datasets. Therefore, the impact of different analysis strategies and processing models should be considered when performing environmental load corrections. After environmental load correction, 30% of the SOPAC time series show a decrease in the draconitic year signal amplitude, with a correction rate of 3.6%. In contrast, about 20% of the time series in the COMB, NGL, and JPL datasets exhibit a decrease in amplitude, with a correction rate of 20%. This suggests that environmental corrections are not the primary factor influencing the draconitic year error, further confirming that this signal may be a systematic error in the GNSS modelation.. For the 14-, 8-, and 5.5-day periods, around 50% of the datasets derived from different analysis strategies demonstrate a decrease in amplitude after load correction, with minimal change rates. This also indicates that environmental loading is not the main cause of these periodic signals. The 14-day signal is likely due to imperfect tidal load modeling and signal aliasing.
Following load correction and the removal of CMEs (see
Section 3.3), the average amplitudes of these periodic signals were computed to investigate their potential correlation with the origins of the aforementioned signals. The corresponding average variation rates are presented in
Table 9.
After removing the CME, in addition to environmental load corrections, it was observed that approximately 90% of time series across different analysis strategy datasets exhibited a reduction in the amplitudes of their annual and semi-annual signals, with an average change rate of approximately −60%. This suggests that the annual and semi-annual signals observed in GNSS time series primarily arise from surface mass loading effects and CMEs. The application of appropriate load model corrections and spatial filtering effectively isolates these influences. Approximately 95% of the time series in the NGL and JPL datasets exhibited a reduction in the draconitic year signal amplitude, with a correction rate of about −50%. For SOPAC and COMB, 78.1% and 84.7% of the time series showed a decrease in draconitic year amplitude, with correction rates of −46.9% and −41.8%, respectively. This suggests that the draconitic year signal observed in most stations stems from CMEs, rather than station-specific errors or environmental loads being the primary sources of this phenomenon. In each of the four datasets, more than 80% of time series exhibit a reduction in amplitude for the 14-, 8-, and 5.5-day periodic signals. Specifically, the correction rates for the 14-day signal average around −30%, for the 8-day signal, they average approximately −25%, and for the 5.5-day signal, they average about −20%. The findings suggest that the 14-, 8-, and 5.5-day periodic signals arise from unmodeled CMEs, which can be effectively mitigated through spatial filtering.
Currently, the origin of the 5.5-day periodic signal remains uncertain. This section aims to further investigate whether the generation of this periodic signal is associated with the analysis strategy. We calculated the average amplitude of the 5.5-day periodic signal for different analysis strategies. The data processed using GipsyX showed an average amplitude of 0.07 mm. In contrast, data processed using GAMIT/GLOBK from SOPAC and their joint solution COMB exhibited average amplitudes of 0.06 mm and 0.05 mm, respectively. These results suggest that data processed with GipsyX exhibit higher average amplitudes of the 5.5-day signal compared with other datasets. This implies that the GipsyX processing software may induce the 5.5-day periodic signal in GNSS time series.
Table 10 presents the distribution of amplitudes for the 5.5-day periodic signal in the original time series. It is evident that approximately 70% of the data processed using GipsyX have amplitudes below 0.1 mm, with 5% of time series exhibiting amplitudes exceeding 0.2 mm. In contrast, for data processed using GAMIT/GLOBK from the SOPAC and their joint solution COMB, 90% of time series have amplitudes below 0.1 mm, and none of the time series have amplitudes exceeding 0.2 mm. These findings further corroborate that GipsyX processing software may contribute to the 5.5-day periodic amplitude in the signals.
We investigated this result by computing the average amplitudes of the 5.5-day periodic signal from the raw data, the environmentally corrected data, and the PCA-filtered time series. The statistical results are summarized in
Table 11. Following PCA filtering, the average amplitudes of the 5.5-day signal that was obtained using JPL and NGL data processed with GipsyX remained higher than those obtained using SOPAC data processed with GAMIT/GLOBK and their combined solution COMB. This indicates that the use of GipsyX results in higher 5.5-day periodic amplitudes compared with GAMIT/GLOBK [
54].



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}