

Mission Planning and Trajectory Optimization in UAV Swarm for Track Deception against Radar Network

Abstract
1. Introduction
1.1. Literature Review and Motivation
1.2. Major Contributions
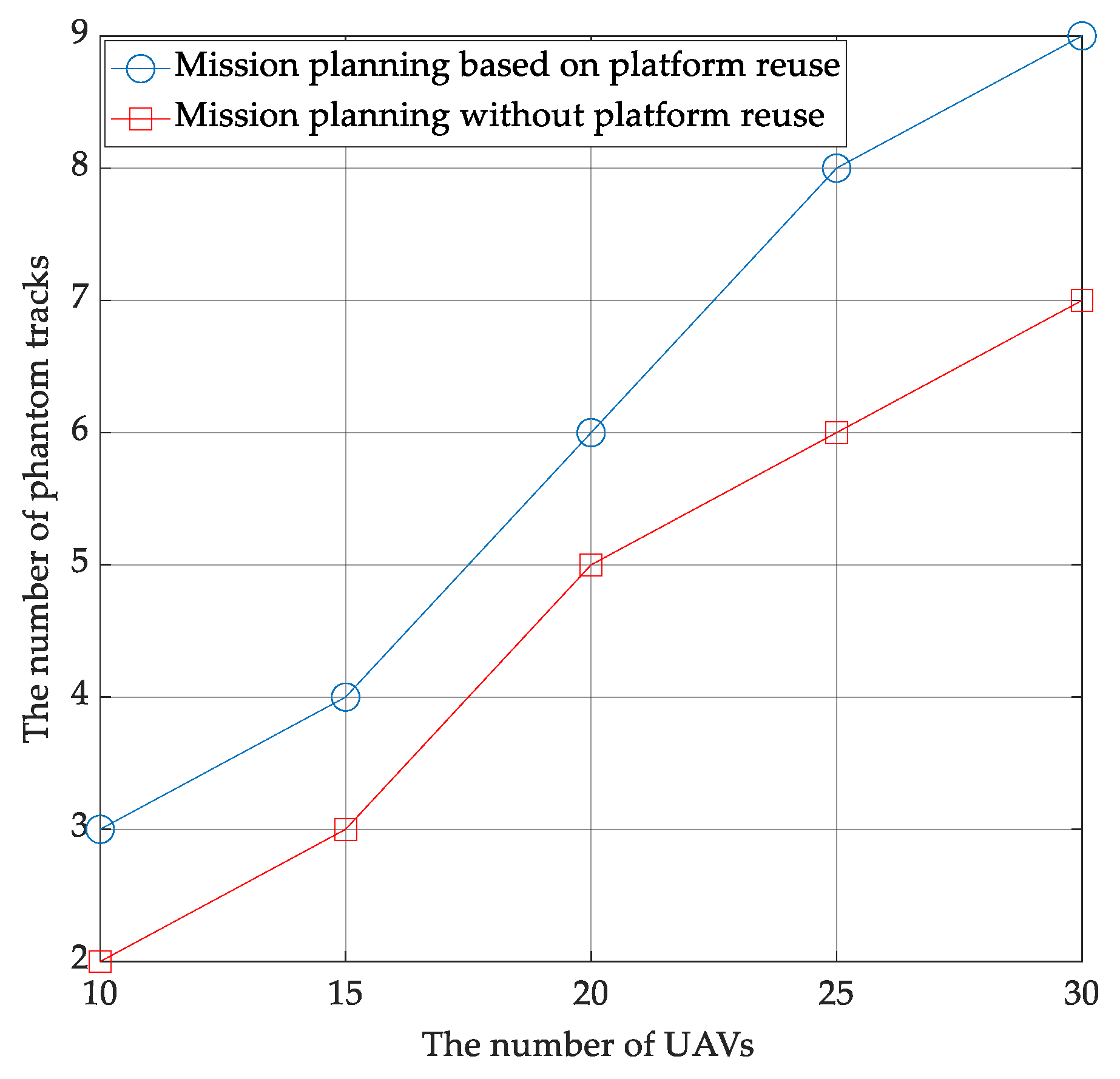
- The problem of phantom track generation by UAV swarm against radar network is formulated as a mathematical optimization model under the constraints of the UAV kinematic performance, phantom track rotation angles, and homology test. Previous studies on track deception primarily aimed to obtain feasible flight trajectories, with little focus on efficient track deception. Thus, we propose a mission planning and trajectory optimization scheme to produce numerous high-speed phantom tracks using a UAV swarm. To be more specific, our goal is to maximize the number of phantom targets while minimizing the total flight distance of the UAV swarm. This is achieved by jointly conducting mission planning and optimizing the trajectories of UAV swarm and phantom track rotation angles within the constraints of UAV kinematic performance, phantom track rotation angles, and homology test.
- In order to tackle this mixed-integer programming, multivariable, non-linear, dual-objective optimization problem, we design a three-stage solution methodology, which incorporates the mission planning based on platform reuse and PSO algorithm. Generally speaking, since the UAVs and phantom targets must adhere to the LOS criterion, it is challenging and rather difficult to determine the feasible and optimal solution. By exploiting the problem partition, we transform the origin problem into two subproblems, solving them by the mission planning based on platform reuse and PSO algorithm, respectively, to find the suboptimal solutions.
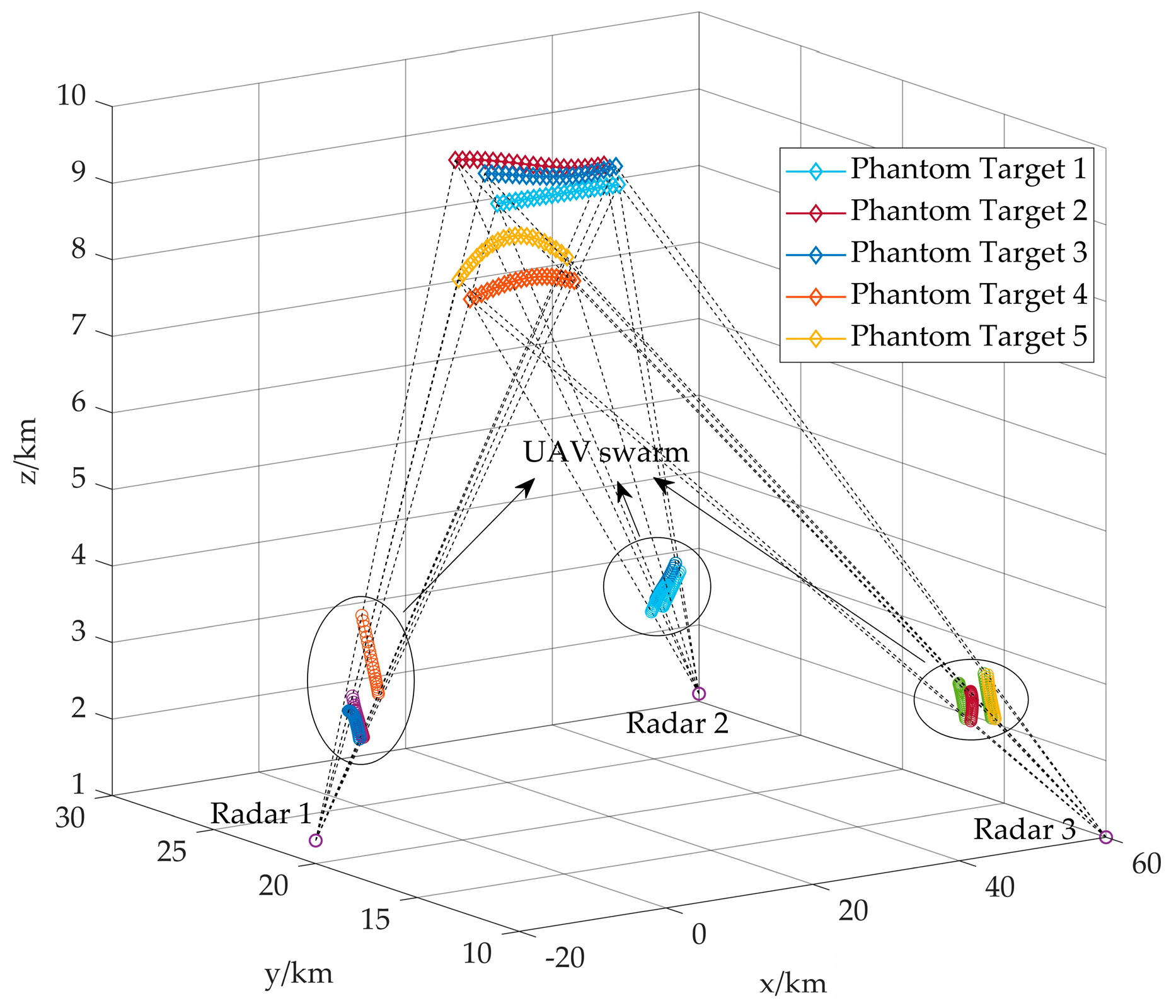
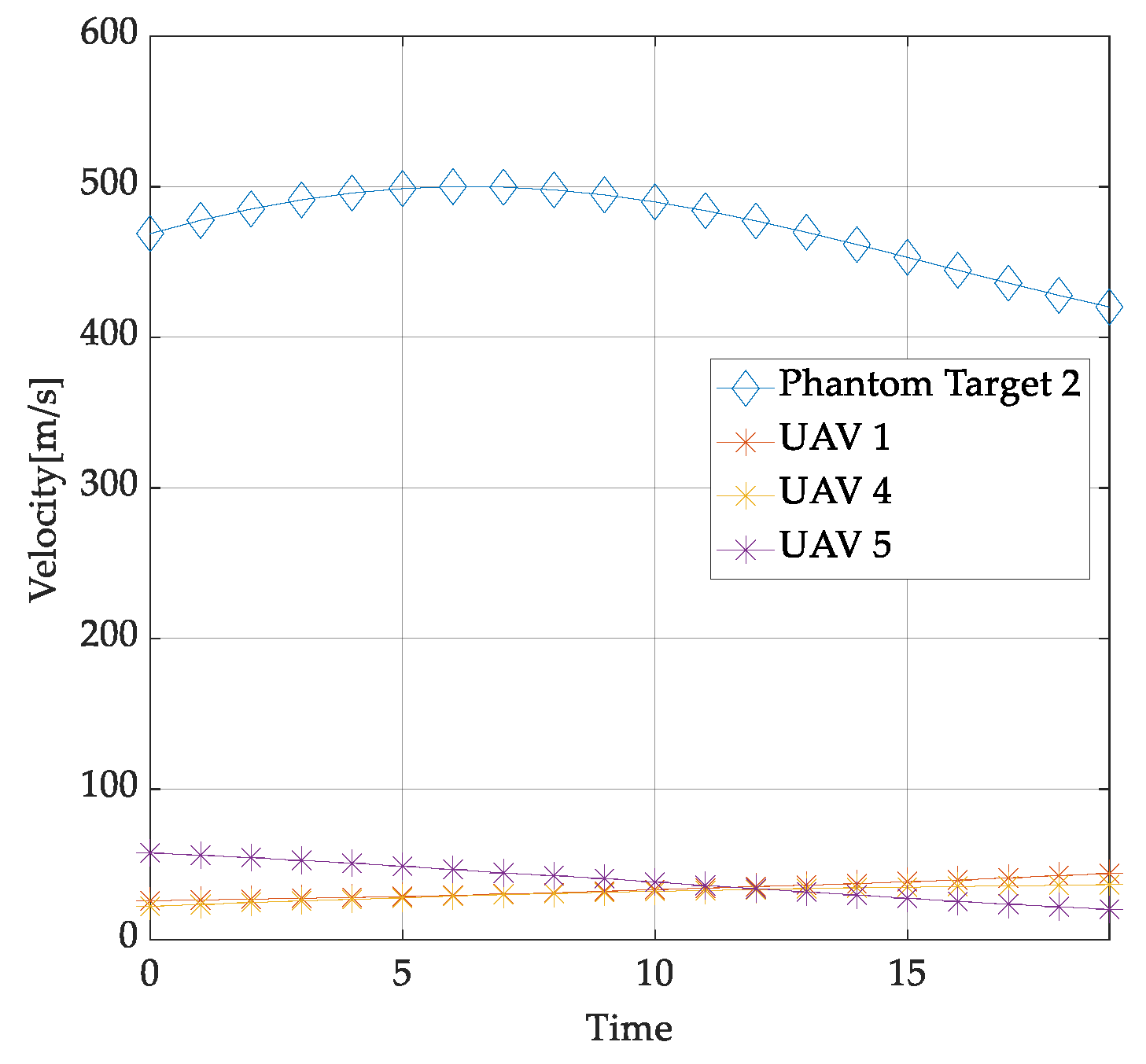
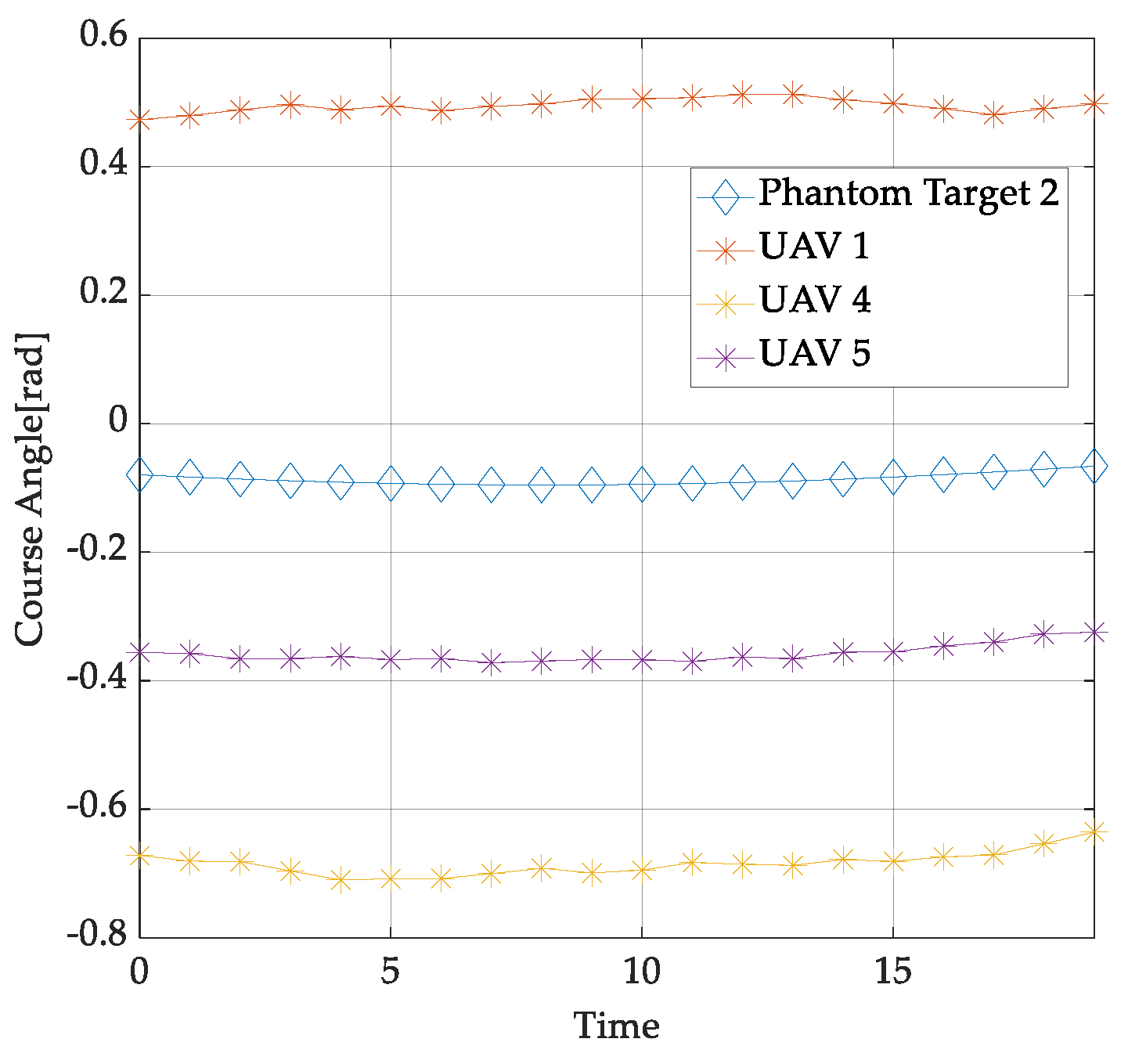
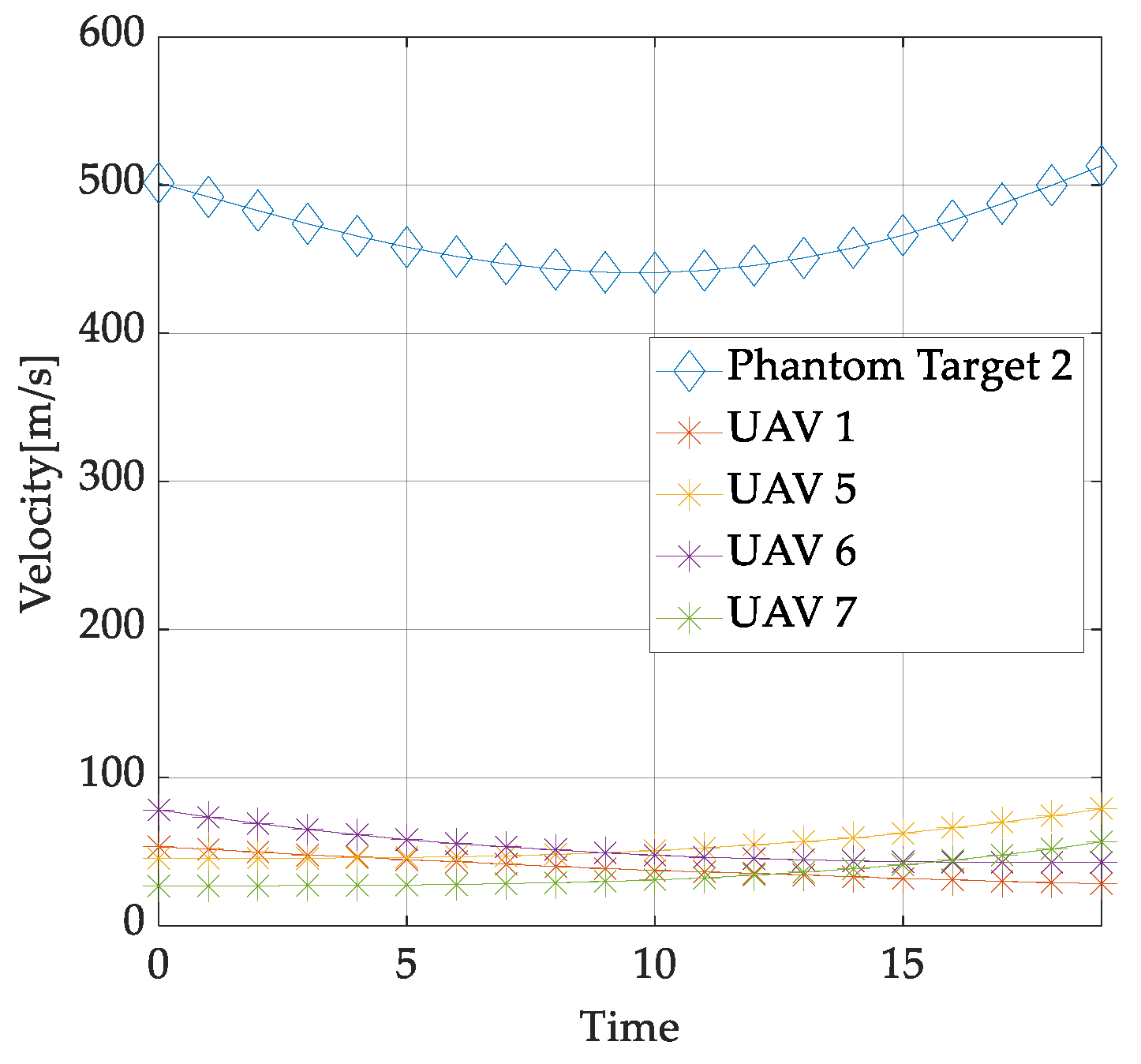
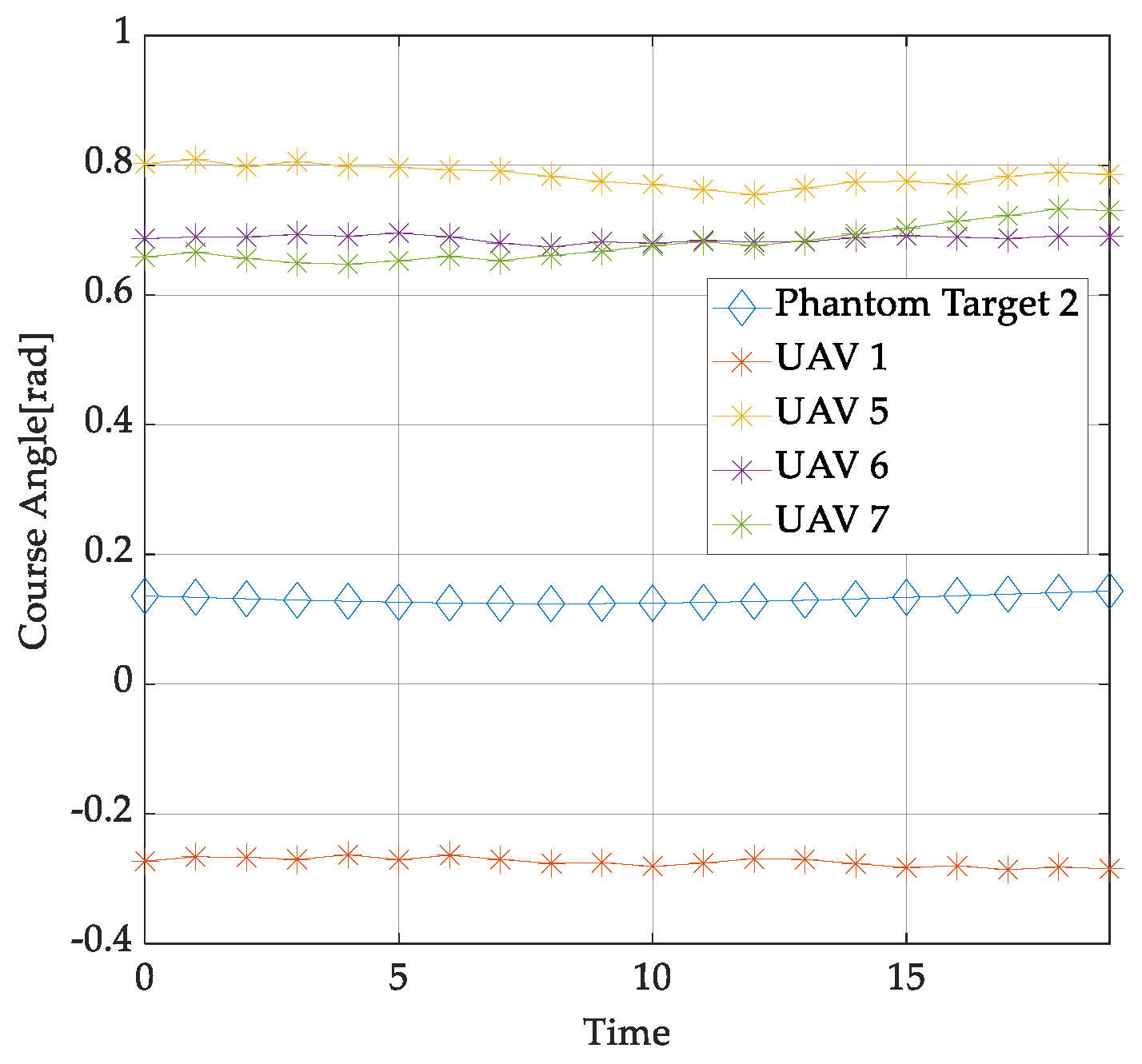
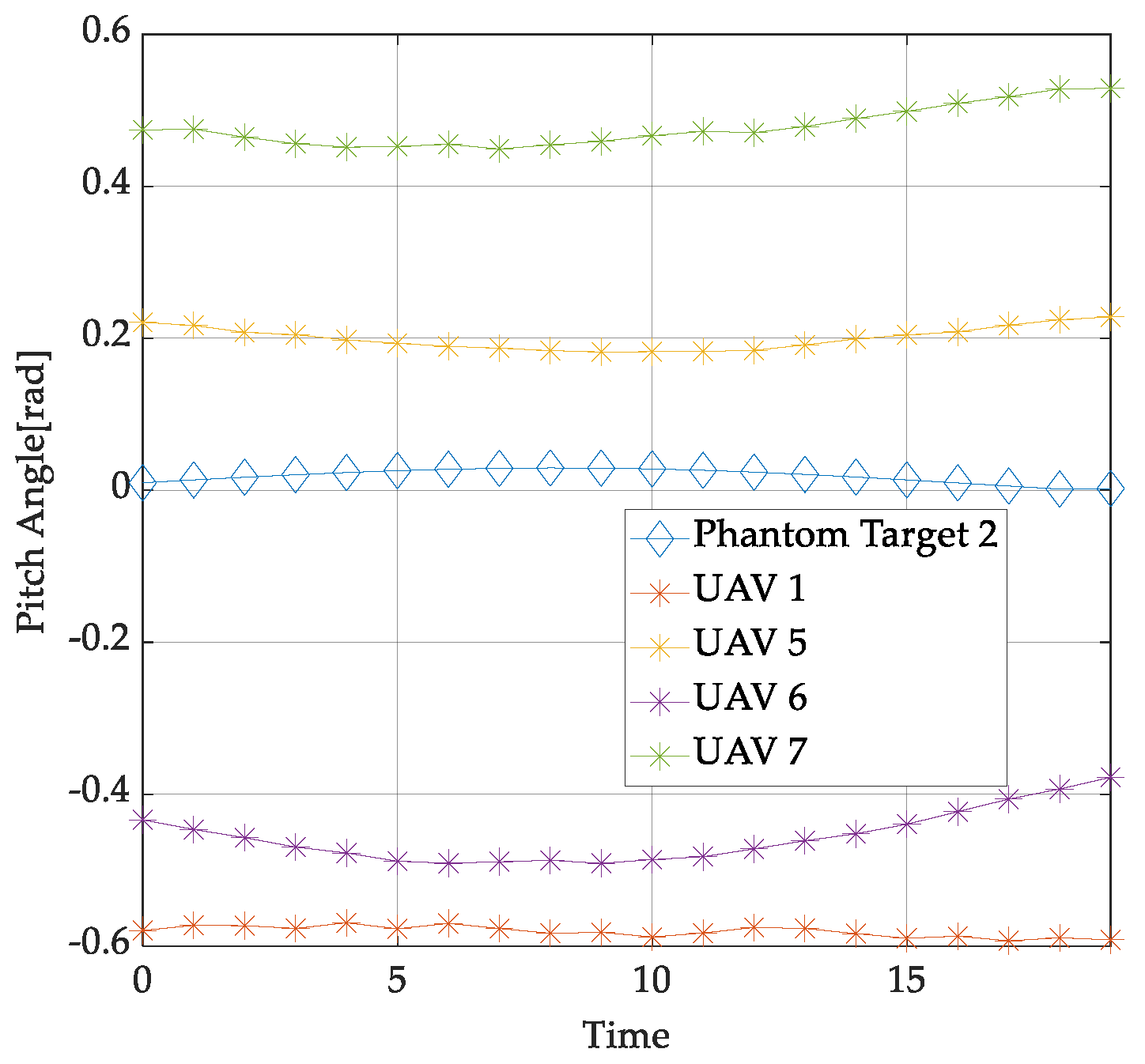
- Numerical simulation is provided to validate the superiority of the proposed mission planning and trajectory optimzation scheme in terms of the number of phantom targets and velocity performance. The results demonstrate that the proposed scheme can generate more high-speed phantom targets. Additionally, the UAVs maintain low speeds consistently with smooth motion curves, indicating feasible trajectories without excessive maneuvering.
1.3. Organization of the Article
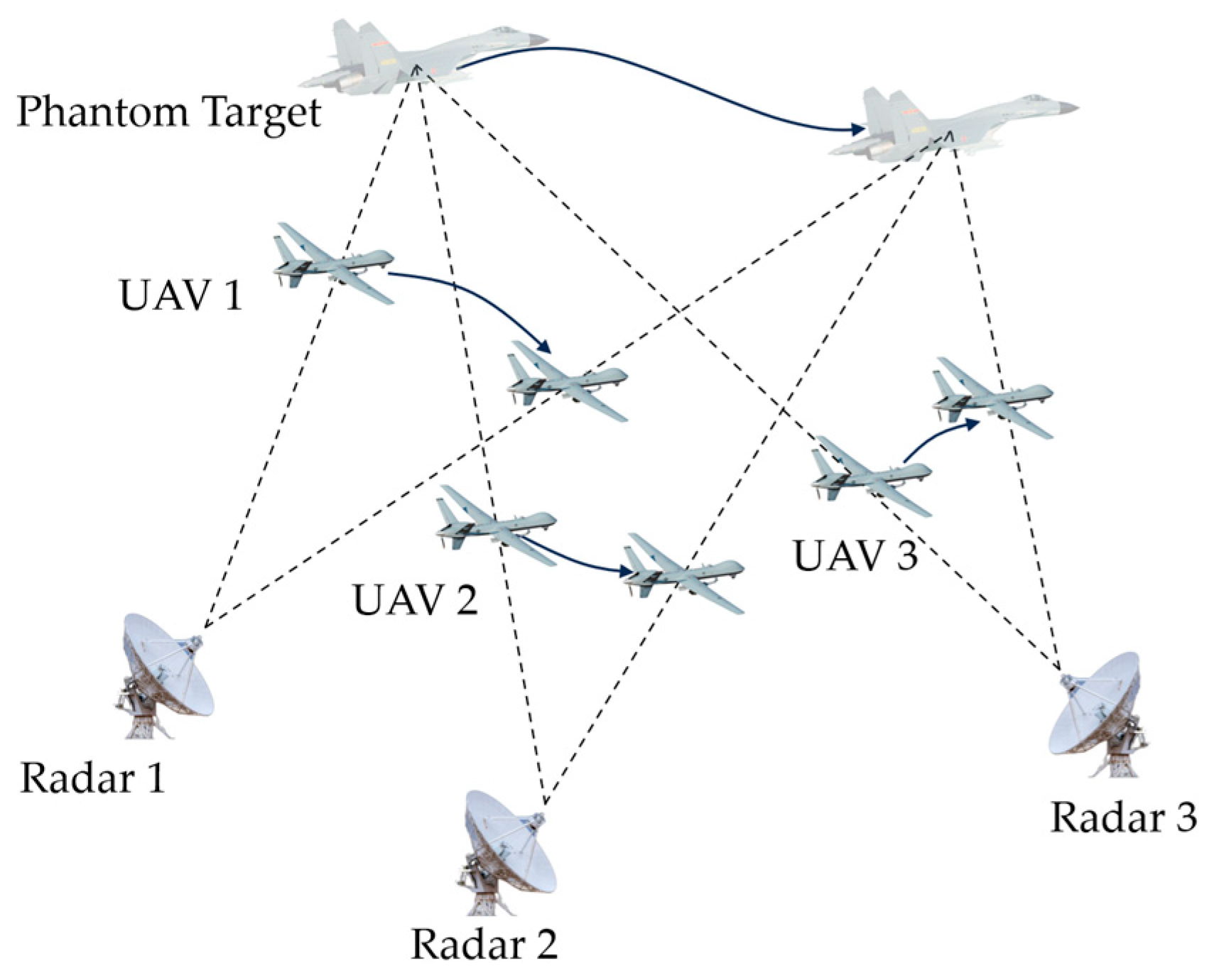
2. Fundamental Principle of Track Deception
3. System Model
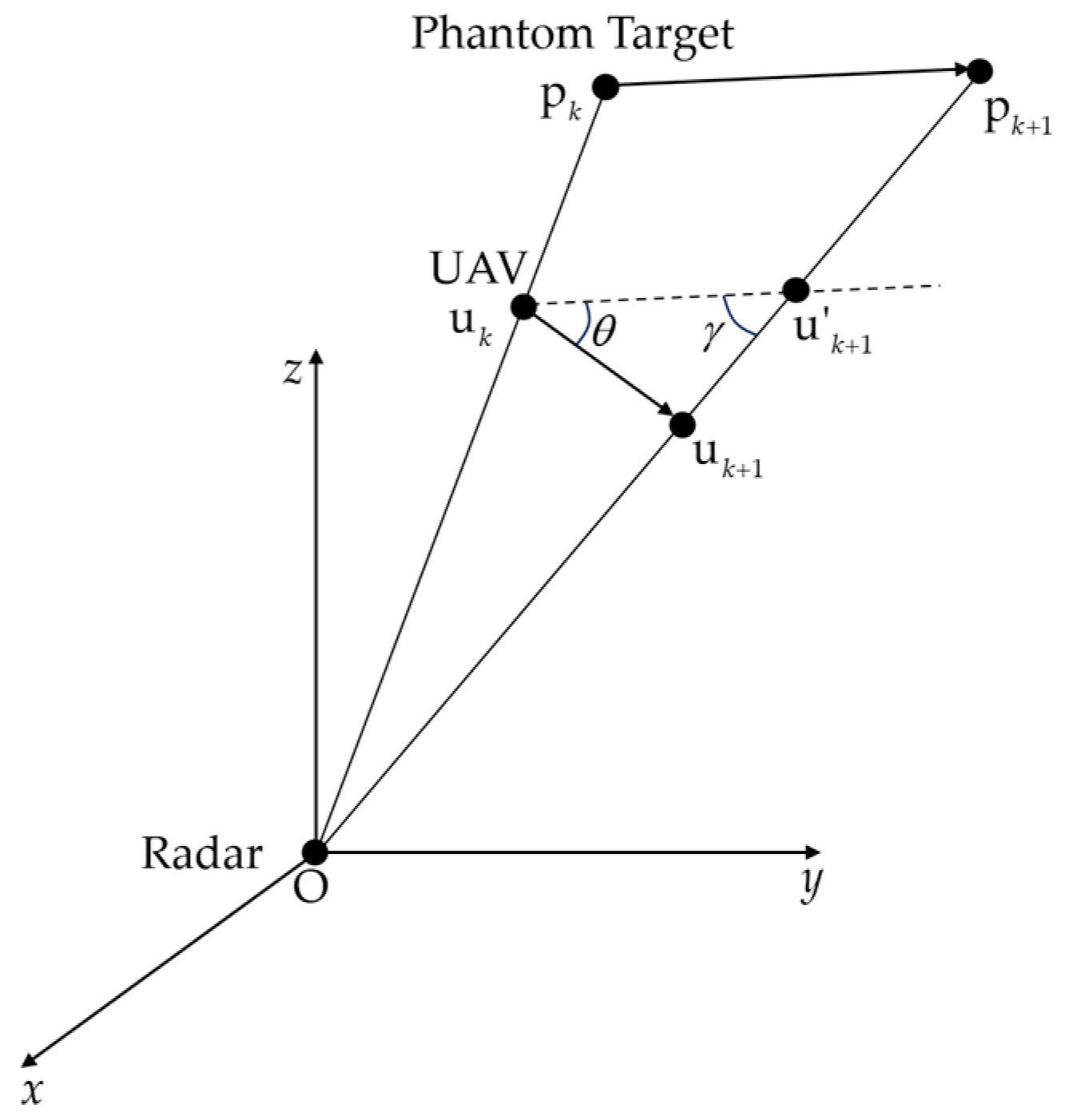
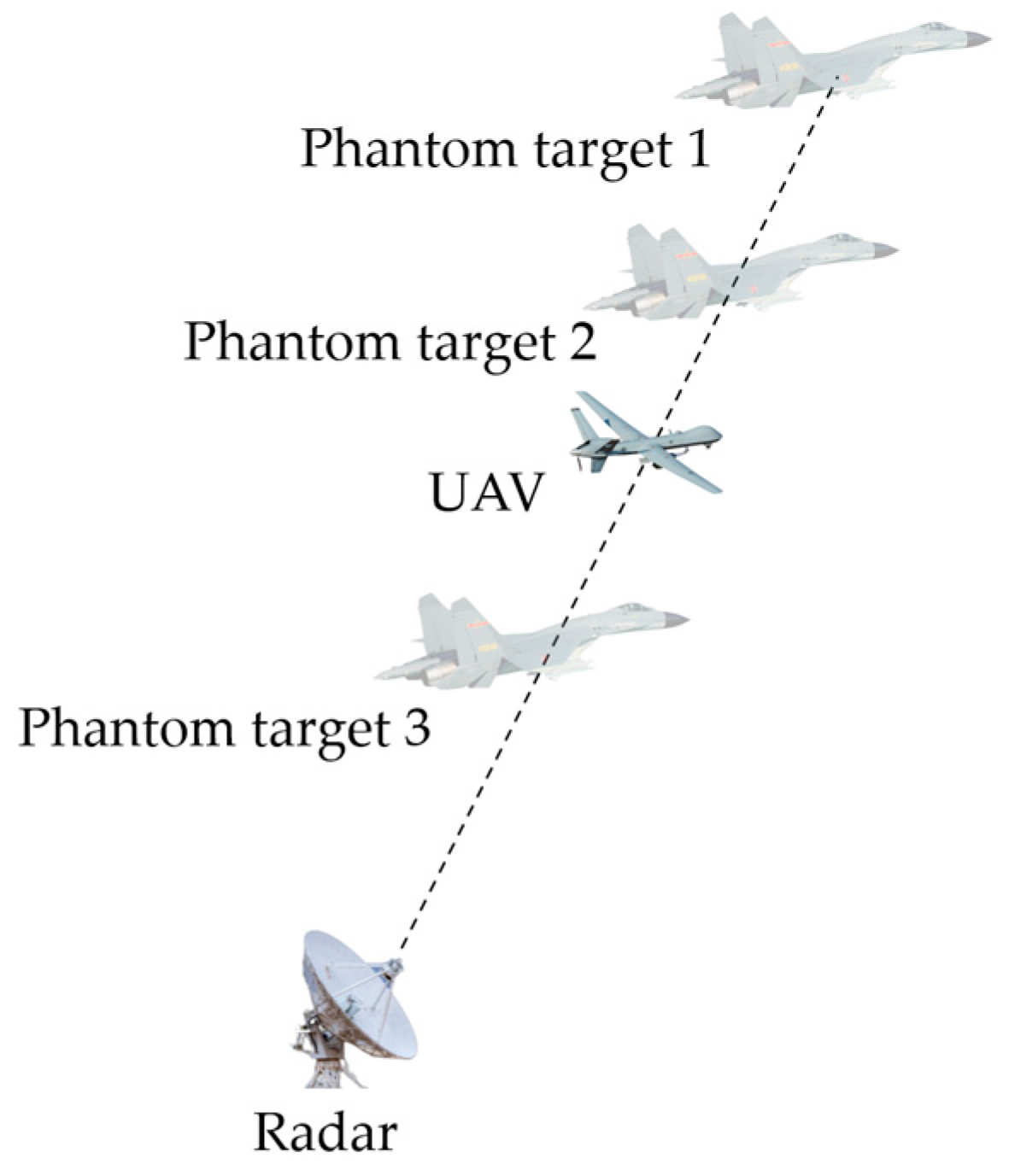
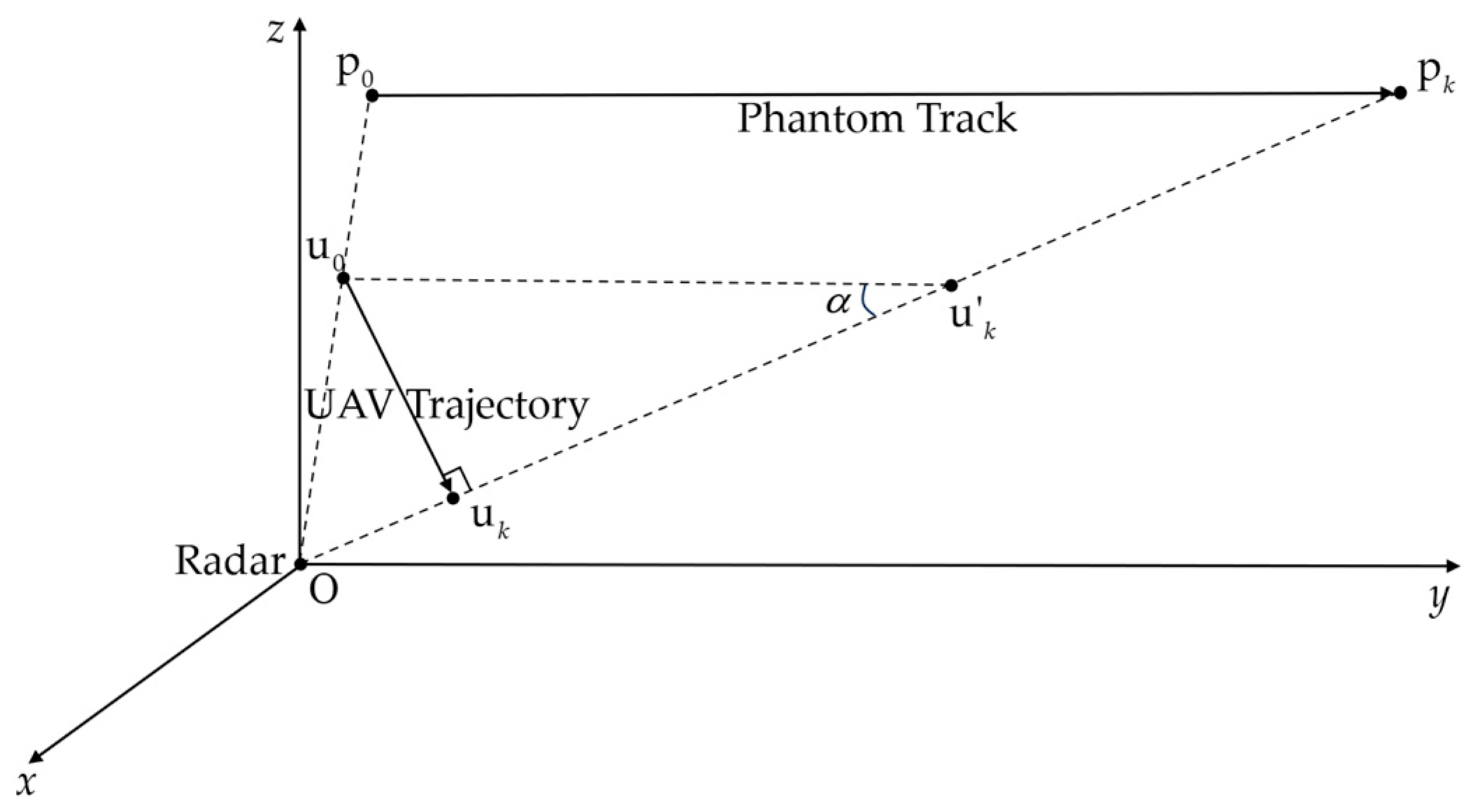
3.1. Track Deception Model by Single UAV
3.2. Performance Metric for Track Deception
3.3. Problem Formulaion
4. Solution Technique
| Algorithm 1: The Detailed Steps of the PSO Algorithm for Trajectory Optimization in UAV Swarm |
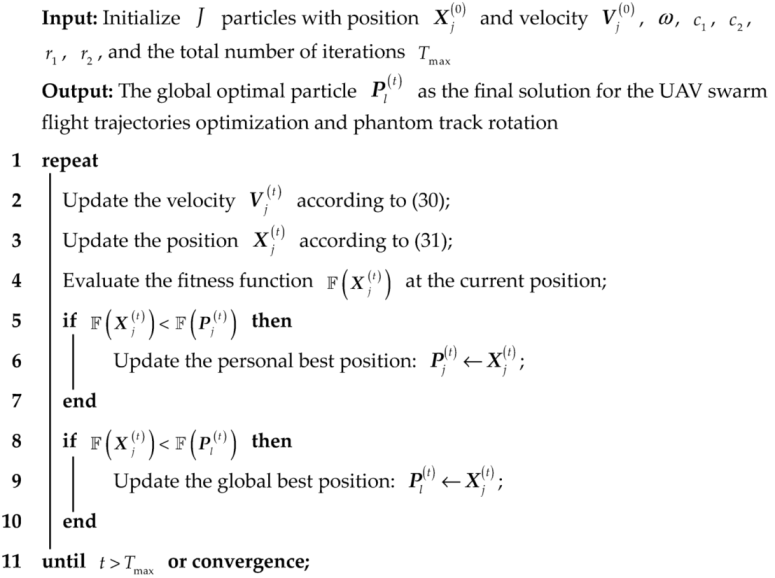 |
5. Numerical Simulation
5.1. Experiment 1
5.2. Experiment 2
5.3. Experiment 3
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, H.L.; Liu, N.; Zhang, L.R.; Li, Q.; Zhang, J.; Tang, S.Y.; Zhao, S.S. An interference suppression method for multistatic radar based on noise subspace projection. IEEE Sens. J. 2020, 20, 8797–8805. [Google Scholar] [CrossRef]
- Zhao, S.S.; Liu, N.; Zhang, L.R.; Zhou, Y.; Li, Q. Discrimination of deception targets in multistatic radar based on clustering Analysis. IEEE Sens. J. 2016, 16, 2500–2508. [Google Scholar] [CrossRef]
- Bai, P.; Wang, W.J.; Wang, Y.B.; Liang, X.D.; Zhang, J.Q. Phantom track deception against radar networks using UAVs: Review. Acta Aeronaut. Astronaut. Sin. 2020, 41, 23912. [Google Scholar] [CrossRef]
- López, B.; Muñoz, J.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L. 4D trajectory planning based on fast marching square for UAV teams. IEEE Trans. Intell. Transp. Syst. 2024, 25, 5703–5717. [Google Scholar] [CrossRef]
- Cao, M.Q.; Cao, K.; Yuan, S.H.; Nguyen, T.-M.; Xie, L.H. Neptune: Nonentangling trajectory planning for multiple tethered unmanned vehicles. IEEE Trans. Robot. 2023, 39, 2786–2804. [Google Scholar] [CrossRef]
- Du, B.; Chen, J.; Sun, D.F.; Manyam, S.G.; Casbeer, D.W. UAV trajectory planning with probabilistic geo-fence via iterative chance-constrained optimization. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5859–5870. [Google Scholar] [CrossRef]
- Bai, H.; Fan, T.; Niu, Y.; Cui, Z.H. Multi-UAV cooperative trajectory planning based on many-objective evolutionary algorithm. Complex Syst. Model. Simul. 2022, 2, 130–141. [Google Scholar] [CrossRef]
- Tang, J.; Chen, X.; Zhu, X.M.; Zhu, F. Dynamic reallocation model of multiple unmanned aerial vehicle tasks in emergent adjustment scenarios. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1139–1155. [Google Scholar] [CrossRef]
- Tang, J.; Pan, Q.T.; Chen, Z.S.; Liu, G.; Yang, G.L.; Zhu, F.; Lao, S.Y. An Improved Artificial Electric Field Algorithm for Robot Path Planning. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 2292–2304. [Google Scholar] [CrossRef]
- Fu, J.Y.; Sun, G.H.; Yao, W.R.; Wu, L.G. On trajectory homotopy to explore and penetrate dynamically of multi-UAV. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24008–24019. [Google Scholar] [CrossRef]
- Guo, Y.J.; You, C.S.; Yin, C.C.; Zhang, R. UAV trajectory and communication co-design: Flexible path discretization and path compression. IEEE J. Sel. Areas Commun. 2021, 39, 3506–3523. [Google Scholar] [CrossRef]
- Chang, J.F.; Dong, N.; Li, D.H.; Ip, W.H.; Yung, K.L. Skeleton extraction and greedy-algorithm-based path planning and its application in UAV trajectory tracking. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4953–4964. [Google Scholar] [CrossRef]
- Letizia, N.A.; Salamat, B.; Tonello, A.M. A novel recursive smooth trajectory generation method for unmanned vehicles. IEEE Trans. Robot. 2021, 37, 1792–1805. [Google Scholar] [CrossRef]
- Maithripala, D.H.A.; Jayasuriya, S. Radar deception through phantom track generation. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar] [CrossRef]
- Maithripala, D.H.A.; Jayasuriya, S.; Mears, M.J. Phantom track generation through cooperative control of multiple ECAVs based on feasibility analysis. J. Dyn. Syst. Meas. Control 2007, 129, 708–715. [Google Scholar] [CrossRef]
- Purvis, K.B.; Chandler, P.R.; Pachter, M. Feasible flight paths for cooperative generation of a phantom radar track. J. Guid. Control Dyn. 2006, 29, 653–661. [Google Scholar] [CrossRef]
- Dhananjay, N.; Kuduvalli, A.; Ghose, D. Realistic coherent phantom track generation by a group of electronic combat aerial vehicles. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013. [Google Scholar] [CrossRef]
- Shima, T.; Chandler, P.; Pachter, M. Decentralized estimation for cooperative phantom track generation. In Cooperative Systems; Grundel, D., Murphey, R., Pardalos, P., Prokopyev, O., Eds.; Springe: Berlin/Heidelberg, Germany, 2007; Volume 588, pp. 339–350. [Google Scholar] [CrossRef]
- Ratnoo, A.; Shima, T. Formation-flying guidance for cooperative radar deception. J. Guid. Control Dyn. 2012, 35, 1730–1739. [Google Scholar] [CrossRef]
- Maithripala, D.H.A.; Jayasuriya, S. Phantom track generation in 3D through cooperative control of multiple ECAVs based on geometry. In Proceedings of the First International Conference on Industrial and Information Systems, Tirtayasa, Indonesia, 8–11 August 2006. [Google Scholar] [CrossRef]
- Lee, I.-H.; Bang, H. Phantom track generation using predictive control concept. In Proceedings of the 2011 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Republic of Korea, 26–29 October 2011. [Google Scholar]
- Dhananjay, N.; Ghose, D.; Kuduvalli, A. Generation of a class of proportional navigation guided interceptor phantom tracks. J. Guid. Control Dyn. 2015, 38, 2206–2215. [Google Scholar] [CrossRef]
- Xi, J.X.; Wang, L.; Guo, Z.C.; Li, J.L.; Gao, J.A.; Yang, X.G.; Yang, B.; Fan, Z.L.; Li, H.L. Unmanned Aerial Vehicle Group Induction Countering Method Based on Surrounding Group Drive. CN116612183A, 18 August 2023. [Google Scholar]
- Mears, M.J. Cooperative electronic attack using unmanned air vehicles. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar] [CrossRef]
- Purvis, K.B.; Astrom, K.J.; Khammash, M. Online control strategies for highly coupled cooperative UAVs. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007. [Google Scholar] [CrossRef]
- Purvis, K.B.; Chandler, P.R. A review of recent algorithms and a new and improved cooperative control design for generating a phantom track. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007. [Google Scholar] [CrossRef]
- Lin, W.B.; Shi, C.G.; Wang, Z.W.; Zhou, J.J. Intelligent trajectory planning algorithm for unmanned aerial vehicles based on track deception against radar networks. In Proceedings of the 3rd 2023 International Conference on Autonomous Unmanned Systems (3rd ICAUS 2023), Singapore, 8–10 September 2023. [Google Scholar] [CrossRef]
- Xu, Y.J.; Basset, G. Virtual motion camouflage based phantom track generation through cooperative electronic combat air vehicles. Automatica 2010, 46, 1454–1461. [Google Scholar] [CrossRef]
- Liu, X.; Li, D.S. A three-dimensional phantom track generation for radar network deception (January 2019). IEEE Access 2019, 7, 27288–27301. [Google Scholar] [CrossRef]
- Wen, W.; Shi, C.G.; Zhou, J.J. Research on delay error of UAV swarm repeater deception against networked radar. In Proceedings of the Fifteenth International Conference on Signal Processing Systems (ICSPS 2023), Xi’an, China, 17–19 November 2024. [Google Scholar] [CrossRef]
- Purvis, K.B.; Astrom, K.J.; Khammash, M. Estimation and optimal configurations for localization using cooperative UAVs. IEEE Trans. Control Syst. Technol. 2008, 16, 947–958. [Google Scholar] [CrossRef]
- Wang, Y.B.; Wang, W.J.; Zhang, X.D.; Wu, L.R.; Yin, H. The joint phantom track deception and TDOA/FDOA localization using UAV swarm without prior knowledge of radars’ precise locations. Electronics 2022, 11, 1577. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phantom Track | UAV | |||
|---|---|---|---|---|
| 1 | UAV 1 | UAV 2 | … | |
| 2 | UAV 1 | … | ||
| 3 | UAV 2 | … | ||
| … | … | … | … | … |
| … | ||||
| Phantom Track | UAV | |||
|---|---|---|---|---|
| 1 | UAV 1 | UAV 2 | UAV 3 | UAV 4 |
| 2 | UAV 1 | UAV 5 | UAV 6 | UAV 7 |
| 3 | UAV 2 | UAV 8 | UAV 9 | UAV 10 |
| 4 | UAV 3 | UAV 11 | UAV 12 | UAV 13 |
| Phantom Track | UAV | |||
|---|---|---|---|---|
| 5 | UAV 14 | UAV 15 | UAV 16 | UAV 17 |
| 6 | UAV 14 | UAV 18 | UAV 19 | UAV 20 |
| 7 | UAV 15 | UAV 21 | UAV 22 | UAV 23 |
| Phantom Track | UAV | |||
|---|---|---|---|---|
| 8 | UAV 24 | UAV 25 | UAV 26 | UAV 27 |
| 9 | UAV 24 | UAV 28 | UAV 29 | UAV 30 |
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| 20 m/s | 100 m/s | ||
| 2.5 km | 5.5 km | ||
| 0 rad | 0.5 rad | ||
| −1 rad | 1 rad | ||
| rad | rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Shi, C.; Yan, M.; Zhou, J. Mission Planning and Trajectory Optimization in UAV Swarm for Track Deception against Radar Network. Remote Sens. 2024, 16, 3490. https://doi.org/10.3390/rs16183490
Li Y, Shi C, Yan M, Zhou J. Mission Planning and Trajectory Optimization in UAV Swarm for Track Deception against Radar Network. Remote Sensing. 2024; 16(18):3490. https://doi.org/10.3390/rs16183490
Chicago/Turabian StyleLi, Yihan, Chenguang Shi, Mu Yan, and Jianjiang Zhou. 2024. "Mission Planning and Trajectory Optimization in UAV Swarm for Track Deception against Radar Network" Remote Sensing 16, no. 18: 3490. https://doi.org/10.3390/rs16183490
APA StyleLi, Y., Shi, C., Yan, M., & Zhou, J. (2024). Mission Planning and Trajectory Optimization in UAV Swarm for Track Deception against Radar Network. Remote Sensing, 16(18), 3490. https://doi.org/10.3390/rs16183490