

Improving Angle-Only Orbit Determination Accuracy for Earth–Moon Libration Orbits Using a Neural-Network-Based Approach

Abstract
1. Introduction
2. Preliminaries
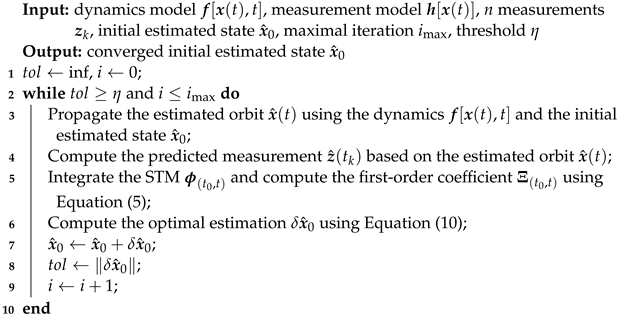
2.1. Least Square Method
| Algorithm 1: Pseudocode of least squares method [55] |
 |
2.2. Networks For Addressing Sequential Inputs
2.2.1. RNN
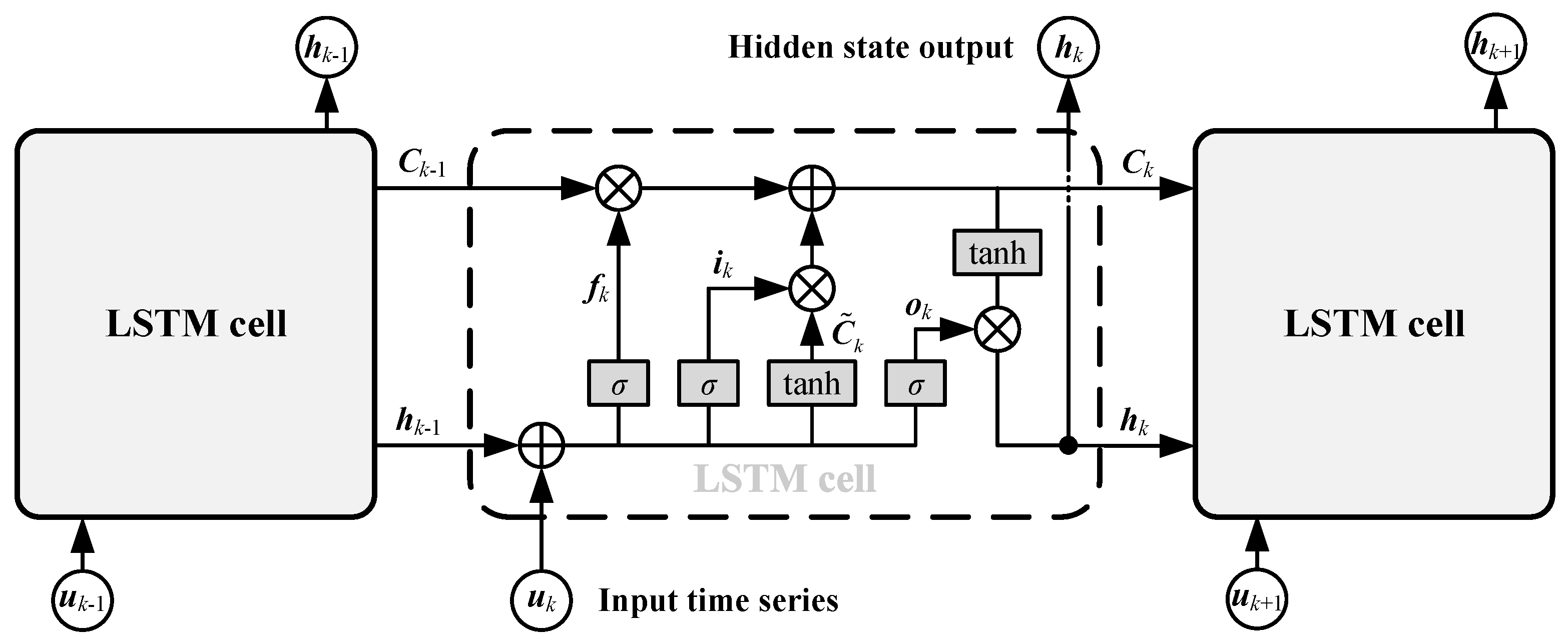
2.2.2. LSTM
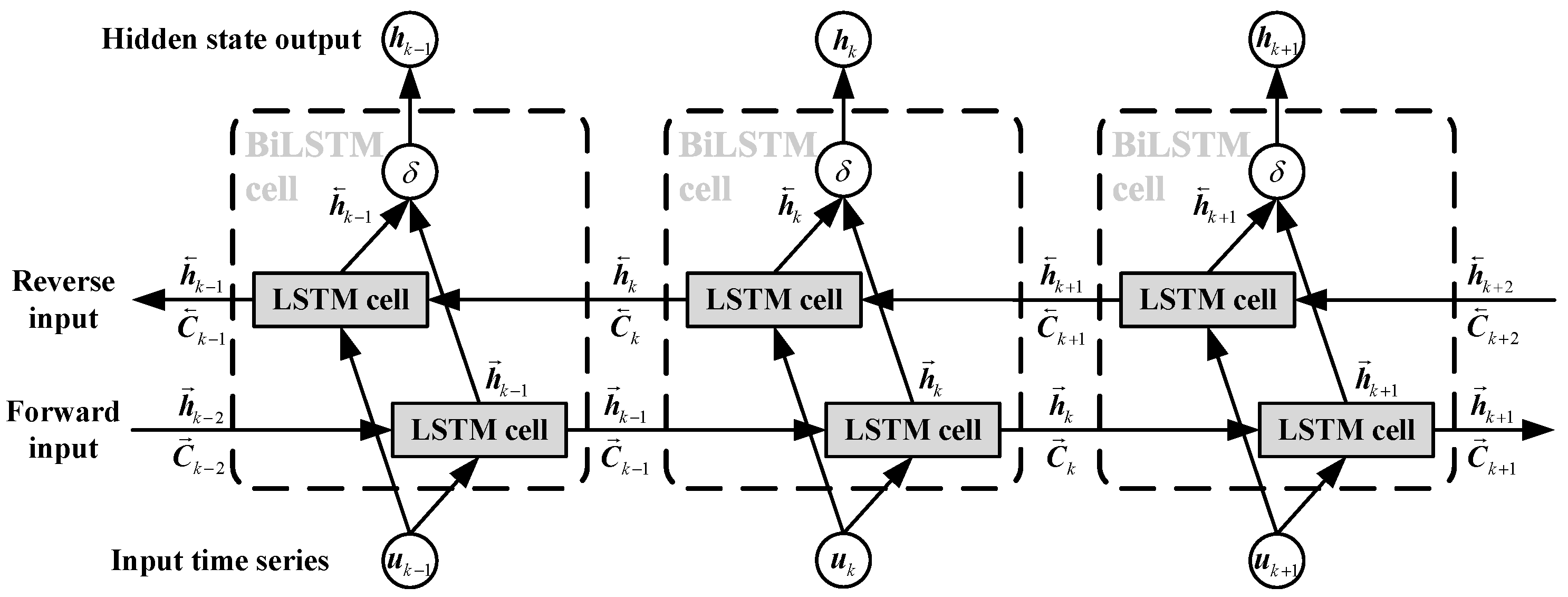
2.2.3. BiLSTM
3. Methodology
3.1. Dynamics and Measurement Model
3.2. Sample Construction
- True measurement error . Note that the true measurement error is equivalent to the measurement noise defined in Equation (1).
- Predicted measurement error .
- Relative measurement error .
- The relative measurement error . The relative measurement error is assumed to contain information related to the true measurement error .
- The variables related to the measurements, including the true measurements and the position of the ground-based station (in the ECI coordinate) . These variables may reflect the sensitivity of the estimated errors to measurement errors.
- The estimated state obtained using the LSM. The estimated state can reflect the physical information of the orbit, for example, the orientation and the distance of the spacecraft.
- The measurement interval (). When , in this work. The measurement interval is an important variable, as the longer the measurement interval is, the weaker the relationship between two successive measurements.
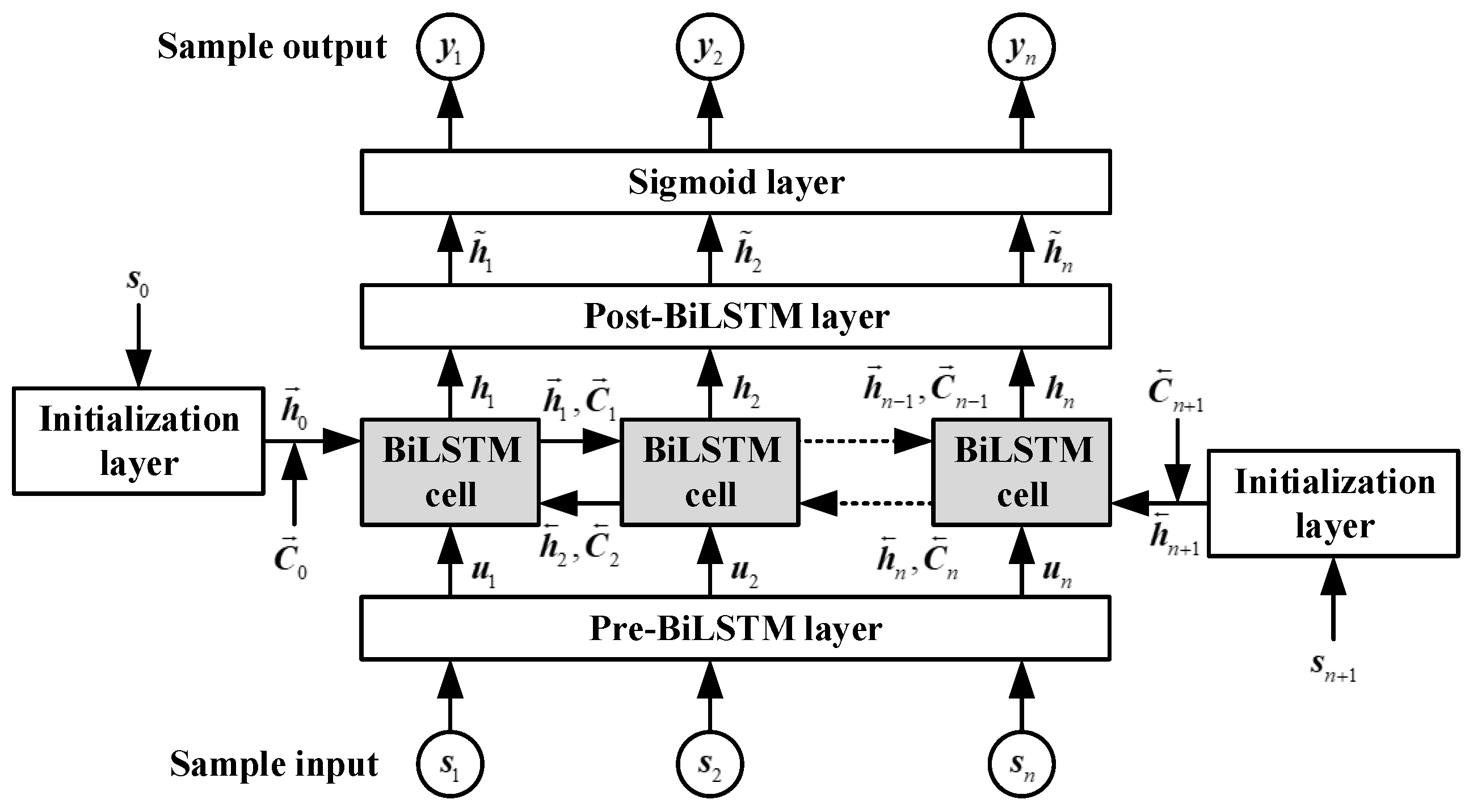
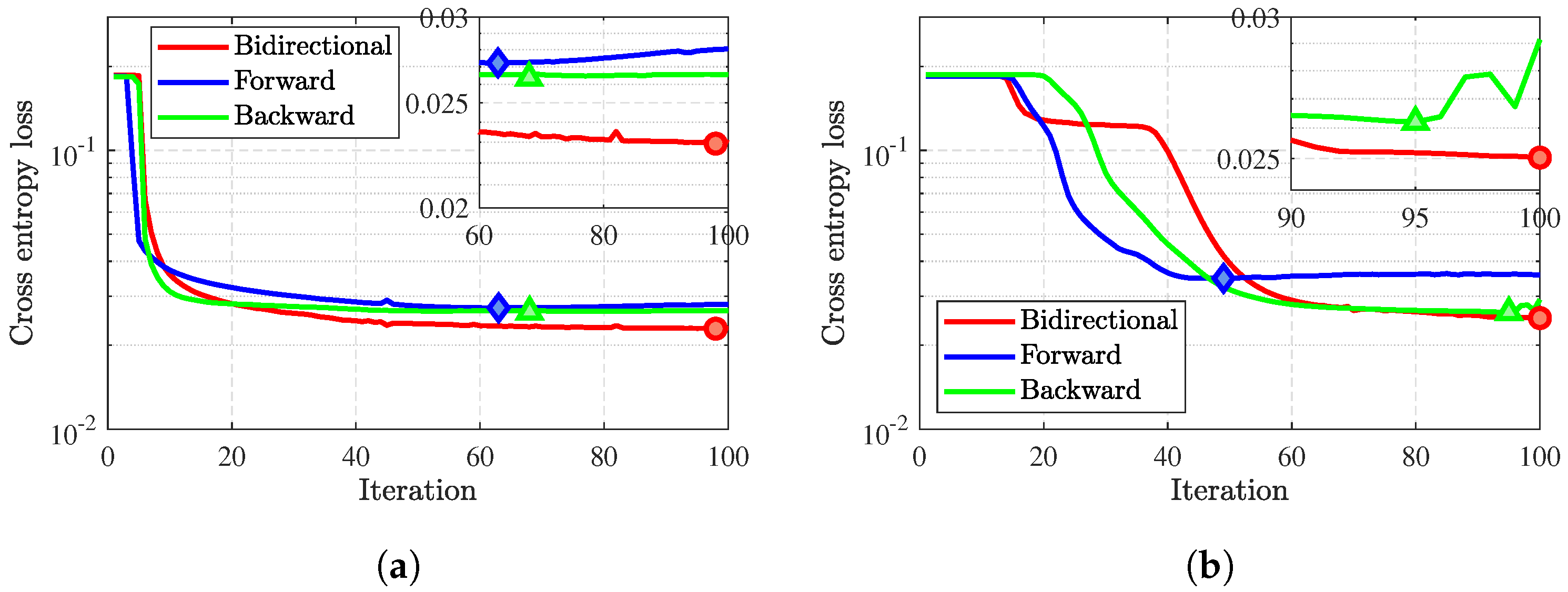
3.3. Modified BiLSTM Structure
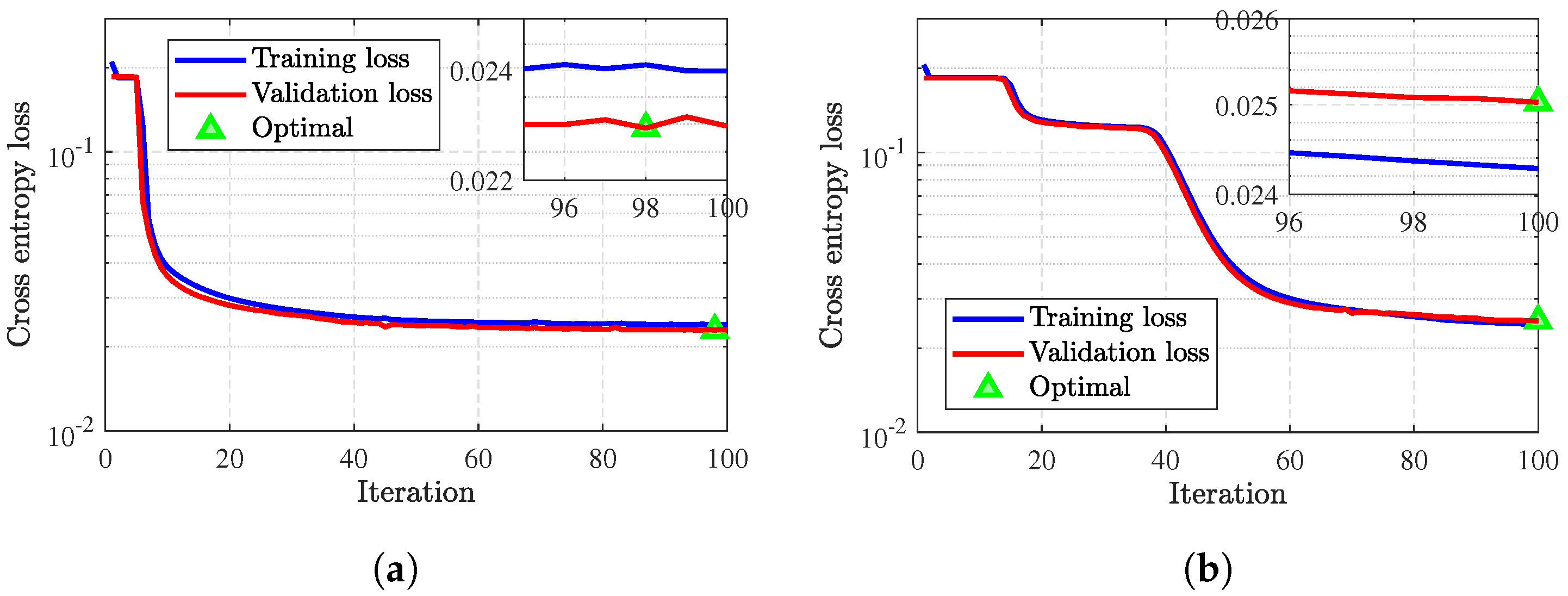
3.4. Training Process and Results
3.5. Overall Methodology
| Algorithm 2: Pseudocode of the proposed method |
|
4. Numerical Simulation
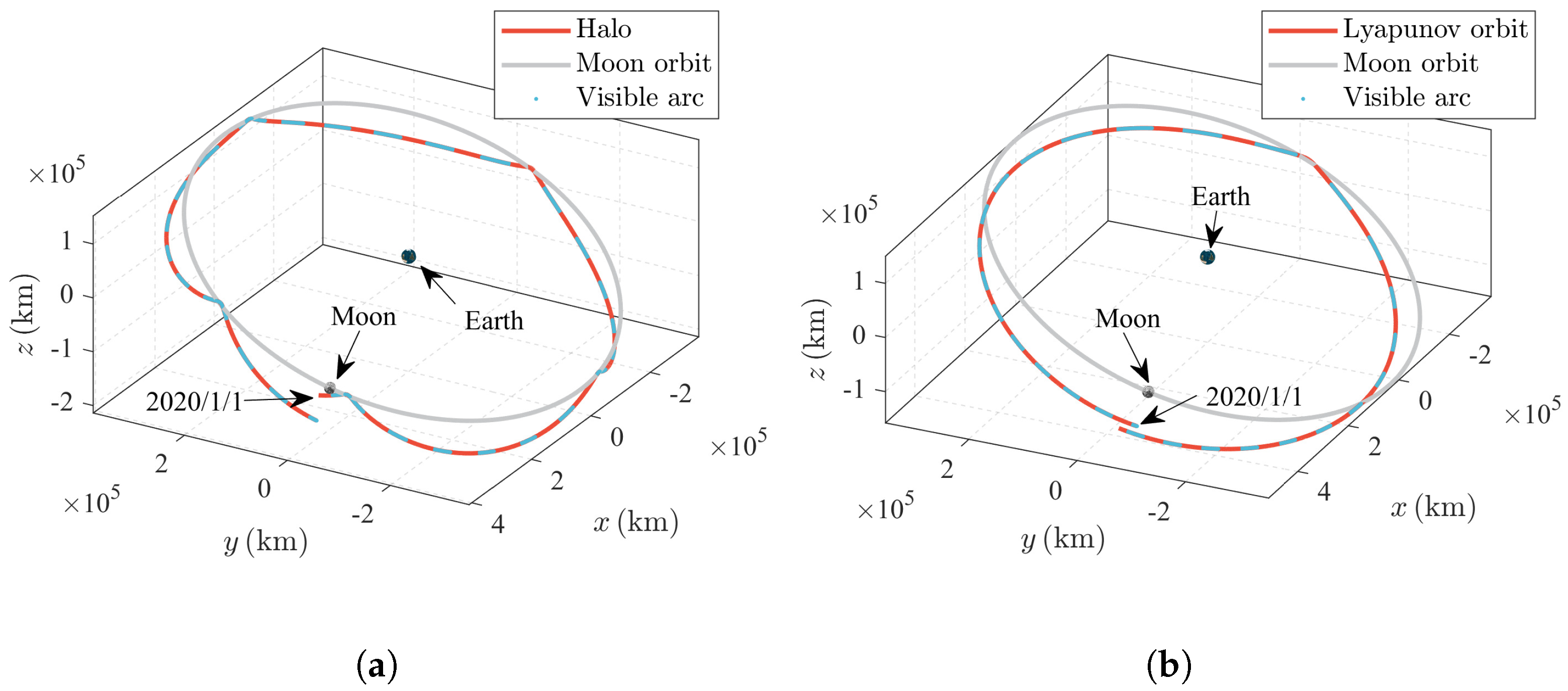
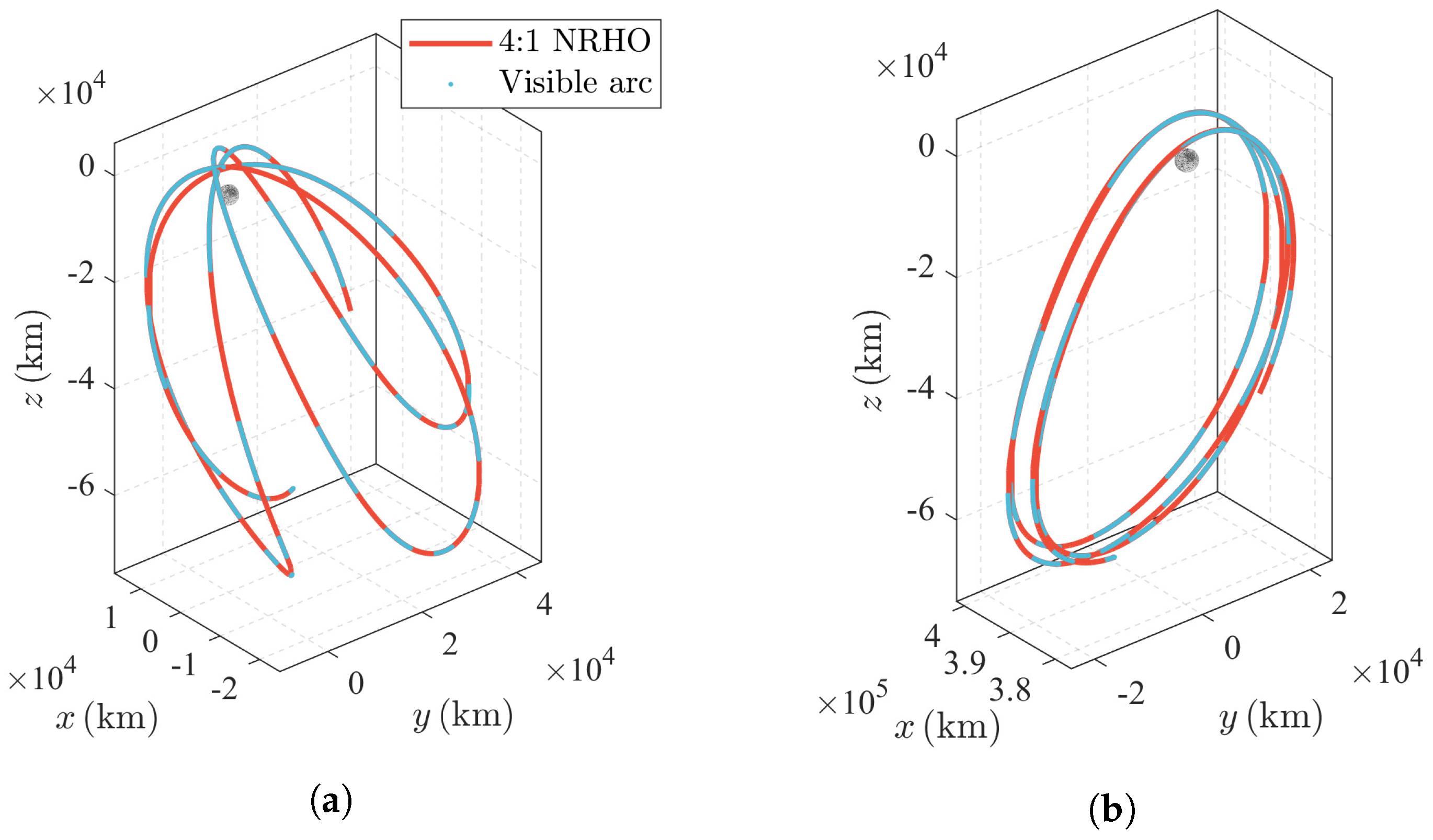
4.1. Scenario Descriptions
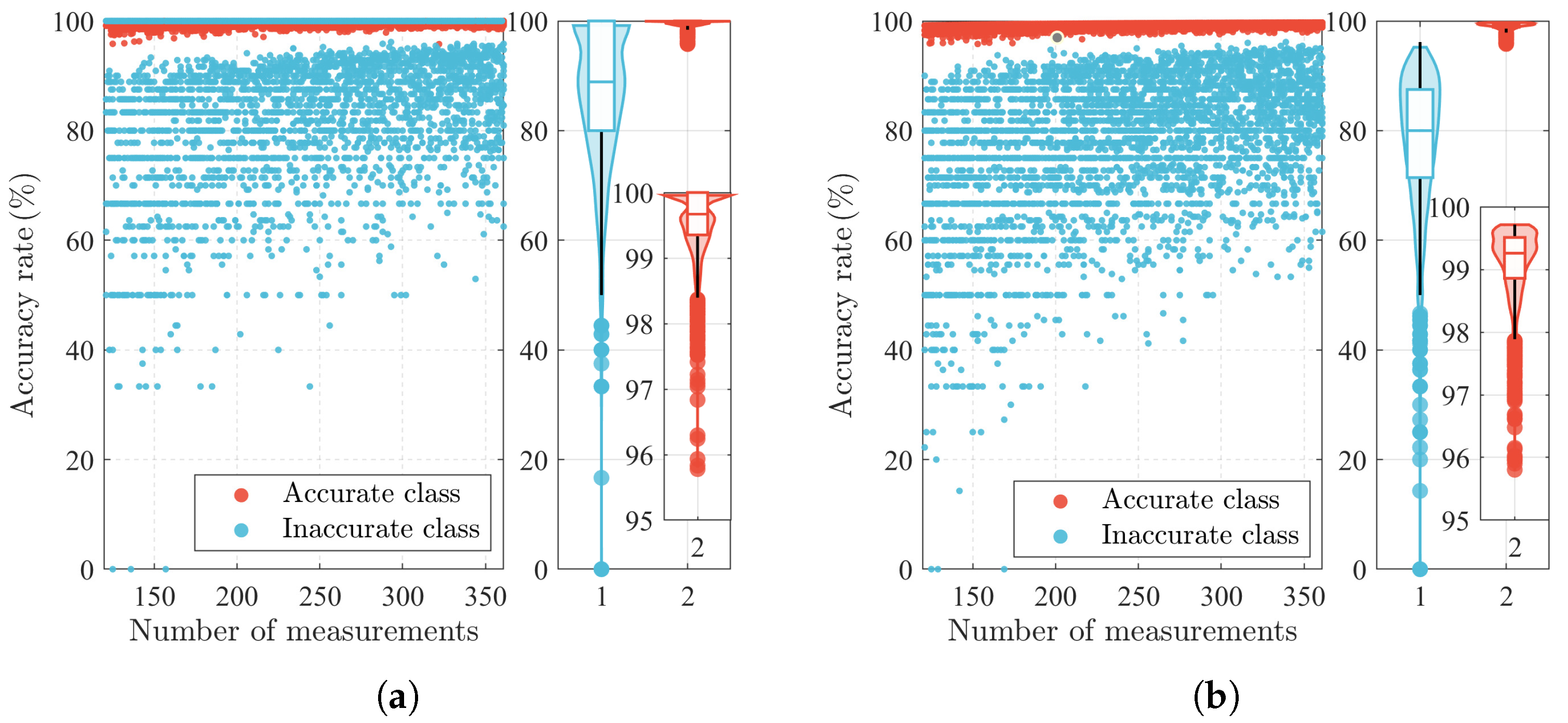
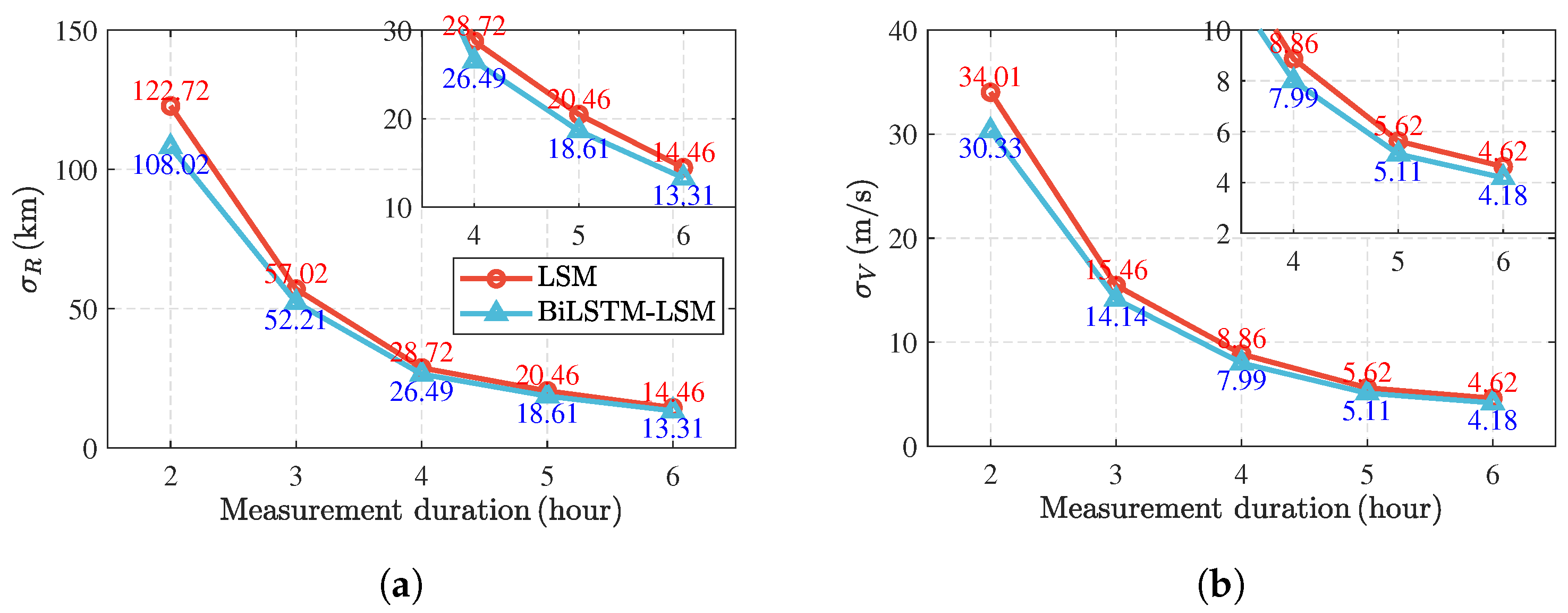
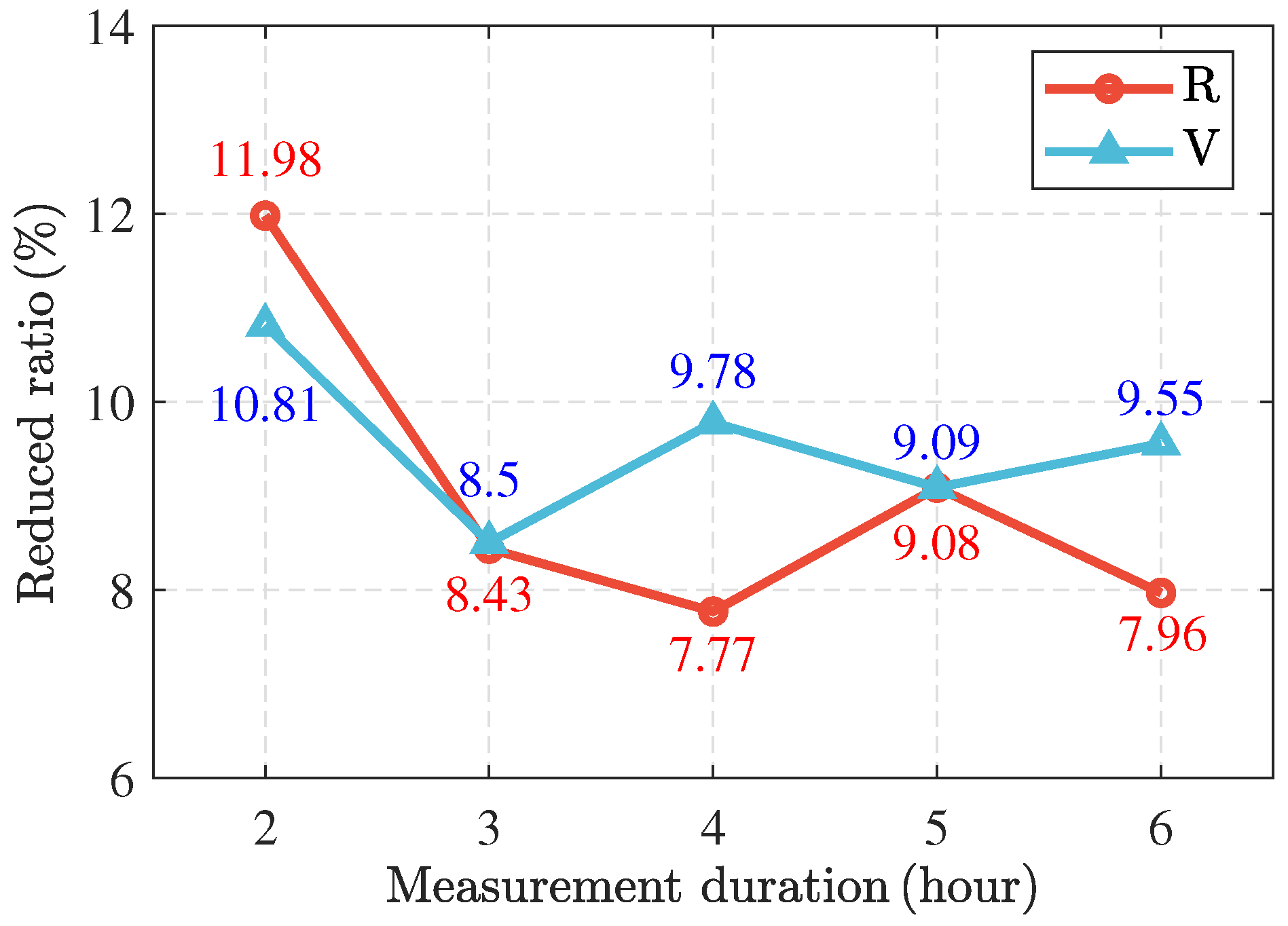
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abusali, P.A.; Tapley, B.D.; Schutz, B.E. Autonomous navigation of global positioning system satellites using cross-link measurements. J. Guid. Control Dyn. 1998, 21, 321–327. [Google Scholar] [CrossRef]
- Zhou, X.; Qiao, D.; Macdonald, M. Orbit Determination for Impulsively Maneuvering Spacecraft Using Modified State Transition Tensor. J. Guid. Control Dyn. 2024, 47, 822–839. [Google Scholar] [CrossRef]
- Li, X.; Scheeres, D.J.; Qiao, D. Bouncing Return Trajectory Design for Precise Lander Deployment to Asteroids. J. Guid. Control Dyn. 2021, 45, 121–137. [Google Scholar] [CrossRef]
- Zhou, X.; Li, X.; Huo, Z.; Meng, L.; Huang, J. Near-Earth Asteroid Surveillance Constellation in the Sun-Venus Three-Body System. Space Sci. Technol. 2022, 2022, 9864937. [Google Scholar] [CrossRef]
- Duong, N.; Winn, C.B. Orbit determination by range-only data. J. Spacecr. Rocket. 1973, 10, 132–136. [Google Scholar] [CrossRef]
- Hill, K.; Born, G.H. Autonomous interplanetary orbit determination using satellite-to-satellite tracking. J. Guid. Control Dyn. 2007, 30, 679–686. [Google Scholar] [CrossRef]
- Hill, K.; Born, G.H. Autonomous orbit determination from lunar halo orbits using crosslink range. J. Spacecr. Rocket. 2008, 45, 548–553. [Google Scholar] [CrossRef]
- Cinelli, M.; Ortore, E.; Mengali, G.; Quarta, A.A.; Circi, C. Lunar orbits for telecommunication and navigation services. Astrodynamics 2024, 8, 209–220. [Google Scholar] [CrossRef]
- Geller, D.K.; Klein, I. Angles-only navigation state observability during orbital proximity operations. J. Guid. Control Dyn. 2014, 37, 1976–1983. [Google Scholar] [CrossRef]
- Qiao, D.; Zhou, X.; Li, X. Analytical configuration uncertainty propagation of geocentric interferometric detection constellation. Astrodynamics 2023, 7, 271–284. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Circi, C. Mars High Orbit Capture Using Manifolds in the Sun–Mars System. J. Guid. Control Dyn. 2020, 43, 1383–1392. [Google Scholar] [CrossRef]
- Qiao, D.; Zhou, X.; Li, X. Configuration uncertainty propagation of gravitational-wave observatory using a directional state transition tensor. Chin. J. Aeronaut. 2024. [Google Scholar] [CrossRef]
- Kedarisetty, S.; Shima, T. Sinusoidal Guidance. J. Guid. Control Dyn. 2023, 47, 1–16. [Google Scholar] [CrossRef]
- Han, H.; Li, X.; Qiao, D. Aerogravity-assist capture into the three-body system: A preliminary design. Acta Astronaut. 2022, 198, 26–35. [Google Scholar] [CrossRef]
- Chen, J.; Qiao, D.; Han, H. Augmented Analytical Aerocapture Guidance by Segmented State Approximation. J. Guid. Control Dyn. 2024, 1–12. [Google Scholar] [CrossRef]
- Li, X.; Warier, R.R.; Sanyal, A.K.; Qiao, D. Trajectory Tracking Near Small Bodies Using Only Attitude Control. J. Guid. Control Dyn. 2018, 42, 109–122. [Google Scholar] [CrossRef]
- Li, X.; Qiao, D.; Macdonald, M. Energy-saving capture at mars via backward-stable orbits. J. Guid. Control Dyn. 2019, 42, 1136–1145. [Google Scholar] [CrossRef]
- Yao, Q.; Han, H.; Qiao, D. Nonsingular Fixed-Time Tracking Guidance for Mars Aerocapture with Neural Compensation. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3686–3696. [Google Scholar] [CrossRef]
- Luo, Y.; Qin, T.; Zhou, X. Observability Analysis and Improvement Approach for Cooperative Optical Orbit Determination. Aerospace 2022, 9, 166. [Google Scholar] [CrossRef]
- Qiao, D.; Zhou, X.; Zhao, Z.; Qin, T. Asteroid Approaching Orbit Optimization Considering Optical Navigation Observability. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 5165–5179. [Google Scholar] [CrossRef]
- Fossà, A.; Losacco, M.; Armellin, R. Perturbed initial orbit determination. Astrodynamics 2024, 1–16. [Google Scholar] [CrossRef]
- Cao, Z.; Li, X.; Qi, Y. Semi-Analytical Assessment of Multiple Gravity-Assist Opportunities Based on Feasibility Domains. J. Guid. Control Dyn. 2024, 47, 1645–1659. [Google Scholar] [CrossRef]
- Zhou, X.; Qin, T.; Macdonald, M.; Qiao, D. Observability analysis of cooperative orbit determination using inertial inter-spacecraft angle measurements. Acta Astronaut. 2023, 210, 289–302. [Google Scholar] [CrossRef]
- Park, R.S.; Scheeres, D.J. Nonlinear semi-analytic methods for trajectory estimation. J. Guid. Control Dyn. 2007, 30, 1668–1676. [Google Scholar] [CrossRef]
- Zhang, S.; Fu, T.; Chen, D.; Ding, S.; Gao, M. An Initial Orbit Determination Method Using Single-Site Very Short Arc Radar Observations. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1856–1872. [Google Scholar] [CrossRef]
- Zhou, X.; Jia, F.; Li, X. Configuration Stability Analysis for Geocentric Space Gravitational-Wave Observatories. Aerospace 2022, 9, 519. [Google Scholar] [CrossRef]
- Kaufman, E.; Lovell, T.A.; Lee, T. Nonlinear observability for relative orbit determination with angles-only measurements. J. Astronaut. Sci. 2016, 63, 60–80. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Chang, L.; Hu, B.; Li, A.; Qin, F. Transformed unscented kalman filter. IEEE Trans. Autom. Control 2013, 58, 252–257. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Lu, H.; Zhang, S.; Cai, H.; Qian, S. Cubature Kalman filtering for relative spacecraft attitude and position estimation. Acta Astronaut. 2014, 105, 254–264. [Google Scholar] [CrossRef]
- Adurthi, N.; Singla, P. Conjugate unscented transformation-based approach for accurate conjunction analysis. J. Guid. Control Dyn. 2015, 38, 1642–1658. [Google Scholar] [CrossRef]
- Nanda, A.; Singla, P.; Karami, M.A. Conjugate unscented transformation–based uncertainty analysis of energy harvesters. J. Intell. Mater. Syst. Struct. 2018, 29, 3614–3633. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Yang, Z. A review of uncertainty propagation in orbital mechanics. Prog. Aerosp. Sci. 2017, 89, 23–39. [Google Scholar] [CrossRef]
- Qiao, D.; Zhou, X.; Li, X. Feasible domain analysis of heliocentric gravitational-wave detection configuration using semi-analytical uncertainty propagation. Adv. Space Res. 2023, 72, 4115–4131. [Google Scholar] [CrossRef]
- Shang, H.; Liu, Y. Assessing accessibility of main-belt asteroids based on Gaussian process regression. J. Guid. Control Dyn. 2017, 40, 1144–1154. [Google Scholar] [CrossRef]
- Sun, Z.; Simo, J.; Gong, S. Satellite Attitude Identification and Prediction Based on Neural Network Compensation. Space Sci. Technol. 2023, 3, 9. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, G.; Qiu, S.; Cao, X. Optimal Multi-impulse Linear Rendezvous via Reinforcement Learning. Space Sci. Technol. 2023, 3, 47. [Google Scholar] [CrossRef]
- Li, H.; Chen, S.; Izzo, D.; Baoyin, H. Deep networks as approximators of optimal low-thrust and multi-impulse cost in multitarget missions. Acta Astronaut. 2020, 166, 469–481. [Google Scholar] [CrossRef]
- Gao, T.; Peng, H.; Bai, X. CaLibration of atmospheric density model based on Gaussian Processes. Acta Astronaut. 2020, 168, 273–281. [Google Scholar] [CrossRef]
- Yang, B.; Li, S.; Feng, J.; Vasile, M. Fast Solver for J2-Perturbed Lambert Problem Using Deep Neural Network. J. Guid. Control Dyn. 2022, 45, 875–884. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Improving orbit prediction accuracy through supervised machine learning. Adv. Space Res. 2018, 61, 2628–2646. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Artificial neural network-based machine learning approach to improve orbit prediction accuracy. J. Spacecr. Rocket. 2018, 55, 1248–1260. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Gaussian Processes for improving orbit prediction accuracy. Acta Astronaut. 2019, 161, 44–56. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Comparative evaluation of three machine learning algorithms on improving orbit prediction accuracy. Astrodynamics 2019, 3, 325–343. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Fusion of a machine learning approach and classical orbit predictions. Acta Astronaut. 2021, 184, 222–240. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Machine Learning Approach to Improve Satellite Orbit Prediction Accuracy Using Publicly Available Data. J. Astronaut. Sci. 2020, 67, 762–793. [Google Scholar] [CrossRef]
- Li, B.; Huang, J.; Feng, Y.; Wang, F.; Sang, J. A Machine Learning-Based Approach for Improved Orbit Predictions of LEO Space Debris with Sparse Tracking Data From a Single Station. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4253–4268. [Google Scholar] [CrossRef]
- Zhou, X.; Qin, T.; Meng, L. Maneuvering Spacecraft Orbit Determination Using Polynomial Representation. Aerospace 2022, 9, 257. [Google Scholar] [CrossRef]
- Zhou, X.; Qin, T.; Ji, M.; Qiao, D. A LSTM assisted orbit determination algorithm for spacecraft executing continuous maneuver. Acta Astronaut. 2022, 204, 568–582. [Google Scholar] [CrossRef]
- Zhou, X.; Qiao, D.; Li, X. Neural Network-Based Method for Orbit Uncertainty Propagation and Estimation. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 1176–1193. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, S.; Qin, T. Multi-Spacecraft Tracking and Data Association Based on Uncertainty Propagation. Appl. Sci. 2022, 12, 7660. [Google Scholar] [CrossRef]
- Zhou, X.; Cheng, Y.; Qiao, D.; Huo, Z. An adaptive surrogate model-based fast planning for swarm safe migration along halo orbit. Acta Astronaut. 2022, 194, 309–322. [Google Scholar] [CrossRef]
- Zhou, X.; Li, X.; Zhang, Z. Neural Network–Assisted Initial Orbit Determination Method for Libration Point Orbits. J. Aerosp. Eng. 2024, 37, 4024046. [Google Scholar] [CrossRef]
- Schuster, M.; Paliwal, K. Bidirectional recurrent neural networks. IEEE Trans. Signal Process. 1997, 45, 2673–2681. [Google Scholar] [CrossRef]
- Bonet, I.; Rodriguez, A.; Grau, I. Bidirectional Recurrent Neural Networks for Biological Sequences Prediction BT—Advances in Soft Computing and Its Applications; Springer: Berlin/Heidelberg, Germany, 2013; pp. 139–149. [Google Scholar]
- Gouhara, K.; Watanabe, T.; Uchikawa, Y. Learning process of recurrent neural networks. In Proceedings of the 1991 IEEE International Joint Conference on Neural Networks, Singapore, 18–21 November 1991; Volume 1, pp. 746–751. [Google Scholar] [CrossRef]
- Boden, M.; Hawkins, J. Improved access to sequential motifs: A note on the architectural bias of recurrent networks. IEEE Trans. Neural Netw. 2005, 16, 491–494. [Google Scholar] [CrossRef] [PubMed]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Greff, K.; Srivastava, R.K.; Koutnik, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A Search Space Odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2222–2232. [Google Scholar] [CrossRef]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. The Performance of LSTM and BiLSTM in Forecasting Time Series. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3285–3292. [Google Scholar] [CrossRef]
- Hameed, Z.; Garcia-Zapirain, B. Sentiment Classification Using a Single-Layered BiLSTM Model. IEEE Access 2020, 8, 73992–74001. [Google Scholar] [CrossRef]
- Bretagnon, P. Theory for the motion of all the planets-The VSOP82 solution. Astron. Astrophys. 1982, 114, 278–288. [Google Scholar]
- Moisson, X.; Bretagnon, P. Analytical planetary solution VSOP2000. Celest. Mech. Dyn. Astron. 2001, 80, 205–213. [Google Scholar] [CrossRef]
- Han, H.; Li, X.; Ren, J. Transfer between Libration orbits through the outer branches of manifolds for Phobos exploration. Acta Astronaut. 2021, 189, 321–336. [Google Scholar] [CrossRef]
- Ou, Y.; Zhang, H.; Li, B. Absolute orbit determination using line-of-sight vector measurements between formation flying spacecraft. Astrophys. Space Sci. 2018, 363, 1–13. [Google Scholar] [CrossRef]
- Hu, Y.; Sharf, I.; Chen, L. Three-spacecraft autonomous orbit determination and observability analysis with inertial angles-only measurements. Acta Astronaut. 2020, 170, 106–121. [Google Scholar] [CrossRef]
- Hu, Y.; Sharf, I.; Chen, L. Distributed orbit determination and observability analysis for satellite constellations with angles-only measurements. Automatica 2021, 129, 109626. [Google Scholar] [CrossRef]
- Karim, F.; Majumdar, S.; Darabi, H.; Chen, S. LSTM Fully Convolutional Networks for Time Series Classification. IEEE Access 2018, 6, 1662–1669. [Google Scholar] [CrossRef]
- Daniel, J.G. Generating Periodic Orbits in the Circular Restricted Three-Body Problem with Applications to Lunar South Pole Coverage. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2006. [Google Scholar]
- Zhou, X.; Qiao, D.; Li, X. Adaptive Order-Switching Kalman Filter for Orbit Determination Using Deep-Neural-Network-Based Nonlinearity Detection. J. Spacecr. Rocket. 2023, 60, 1724–1741. [Google Scholar] [CrossRef]
- Howell, K.C.; Pernicka, H.J. Numerical determination of Lissajous trajectories in the restricted three-body problem. Celest. Mech. 1987, 41, 107–124. [Google Scholar] [CrossRef]
- Dormand, J.R.; Prince, P.J. A family of embedded Runge-Kutta formulae. J. Comput. Appl. Math. 1980, 6, 19–26. [Google Scholar] [CrossRef]
- Olsson, A.; Sandberg, G.; Dahlblom, O. On Latin hypercube sampling for structural reliability analysis. Struct. Saf. 2003, 25, 47–68. [Google Scholar] [CrossRef]
- Ghiasi-Shirazi, K. Competitive Cross-Entropy Loss: A Study on Training Single-Layer Neural Networks for Solving Nonlinearly Separable Classification Problems. Neural Process. Lett. 2019, 50, 1115–1122. [Google Scholar] [CrossRef]
- Prabhu, K.; Majji, M.; Alfriend, K.T. Least Sum of Absolute Residuals Orbit Determination. J. Guid. Control Dyn. 2022, 45, 468–480. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LSRM Cell | Input Vectors | Output Vectors |
|---|---|---|
| k-th forward LSTM cell | current input state previous hidden state previous cell state | current forward hidden state current forward cell state |
| k-th reverse LSTM cell | current input state future hidden state future cell state | current reverse hidden state current reverse cell state |
| Parameters | Value |
|---|---|
| Station | Eglin, FL |
| Latitude (deg) | 30.57 |
| Longitude (deg) | −86.21 |
| Altitude (m) | 34.7 |
| Feasible elevation (deg) | 0–90 |
| Orbit | T | J | |||
|---|---|---|---|---|---|
| 1 | 1.1809 | 0 | −0.1558 | 3.4155 | 3.1641 |
| 2 | 1.1807 | −0.0139 | −0.1569 | 3.4139 | 3.1632 |
| 3 | 1.1802 | −0.0259 | −0.1596 | 3.4100 | 3.1611 |
| 4 | 1.1794 | −0.0379 | −0.1636 | 3.4037 | 3.1579 |
| 5 | 1.1782 | −0.0499 | −0.1687 | 3.3949 | 3.1534 |
| 6 | 1.1766 | −0.0619 | −0.1747 | 3.3835 | 3.1479 |
| 7 | 1.1746 | −0.0739 | −0.1811 | 3.3694 | 3.1414 |
| 8 | 1.1721 | −0.0859 | −0.1878 | 3.3521 | 3.1340 |
| 9 | 1.1690 | −0.0979 | −0.1945 | 3.3314 | 3.1257 |
| 10 | 1.1653 | −0.1099 | −0.2010 | 3.3066 | 3.1166 |
| 11 | 1.1611 | −0.1219 | −0.2072 | 3.2768 | 3.1068 |
| 12 | 1.1561 | −0.1339 | −0.2129 | 3.2406 | 3.0963 |
| 13 | 1.1503 | −0.1459 | −0.2179 | 3.1960 | 3.0853 |
| 14 | 1.1435 | −0.1579 | −0.2219 | 3.1395 | 3.0737 |
| 15 | 1.1354 | −0.1699 | −0.2247 | 3.0647 | 3.0617 |
| 16 | 1.1234 | −0.1837 | −0.2252 | 2.9380 | 3.0472 |
| 17 | 1.1113 | −0.1934 | −0.2220 | 2.7897 | 3.0367 |
| 18 | 1.0992 | −0.1993 | −0.2152 | 2.6245 | 3.0302 |
| 19 | 1.0872 | −0.2020 | −0.2053 | 2.4486 | 3.0273 |
| 20 | 1.0759 | −0.2022 | −0.1932 | 2.2778 | 3.0276 |
| 21 | 1.0633 | −0.2003 | −0.1769 | 2.0876 | 3.0308 |
| 22 | 1.0512 | −0.1968 | −0.1586 | 1.9106 | 3.0363 |
| 23 | 1.0392 | −0.1919 | −0.1379 | 1.7420 | 3.0439 |
| 24 | 1.0274 | −0.1856 | −0.1147 | 1.5827 | 3.0533 |
| 25 | 1.0118 | −0.1739 | −0.0798 | 1.3741 | 3.0700 |
| Orbit | T | J | ||
|---|---|---|---|---|
| 1 | 1.1762 | −0.1228 | 3.3979 | 3.1718 |
| 2 | 1.1809 | −0.1558 | 3.4155 | 3.1641 |
| 3 | 1.1843 | −0.1815 | 3.4339 | 3.1565 |
| 4 | 1.1924 | −0.2498 | 3.5122 | 3.1302 |
| 5 | 1.2005 | −0.3235 | 3.6831 | 3.0918 |
| 6 | 1.2086 | −0.3801 | 3.9409 | 3.0565 |
| 7 | 1.2167 | −0.4162 | 4.2071 | 3.0329 |
| 8 | 1.2200 | −0.4275 | 4.3112 | 3.0257 |
| 9 | 1.2248 | −0.4418 | 4.4573 | 3.0166 |
| 10 | 1.2329 | −0.4620 | 4.6912 | 3.0045 |
| 11 | 1.2410 | −0.4792 | 4.9113 | 2.9948 |
| 12 | 1.2491 | −0.4947 | 5.1195 | 2.9869 |
| 13 | 1.2572 | −0.5090 | 5.3172 | 2.9799 |
| 14 | 1.2653 | −0.5226 | 5.5053 | 2.9739 |
| 15 | 1.2734 | −0.5356 | 5.6848 | 2.9685 |
| 16 | 1.2815 | −0.5482 | 5.8560 | 2.9634 |
| 17 | 1.2896 | −0.5606 | 6.0196 | 2.9589 |
| 18 | 1.2977 | −0.5728 | 6.1758 | 2.9545 |
| 19 | 1.3058 | −0.5848 | 6.3251 | 2.9505 |
| 20 | 1.3139 | −0.5967 | 6.4678 | 2.9466 |
| 21 | 1.3220 | −0.6086 | 6.6042 | 2.9427 |
| Parameters | Symbol | Lower Bounds | Upper Bounds |
|---|---|---|---|
| Time of flight (h) | 2 | 6 | |
| Number of measurements (-) | 121 | 361 | |
| Initial position estimated error (km) | |||
| Initial velocity estimated error (m/s) |
| Number of Neurons of Input Layer | Number of Hidden Layers | Number of Neurons of Hidden Layer | Number of Neurons of Output Layer | Mapping Relationship | |
|---|---|---|---|---|---|
| Initialization lager | 14 | L | M | M | |
| 14 | L | M | M | ||
| Pre-BiLSTM layer | 14 | L | M | M | |
| Post-BiLSTM layer | M | L | M | M | |
| Sigmoid layer | M | 1 | M | 2 |
| L | M | Activation Function | Minimal Validation MCE | |
|---|---|---|---|---|
| RA | DEC | |||
| 1 | 16 | Leaky ReLU | 2.5320 | 1.1904 |
| ReLU | 1.1746 | 2.5989 | ||
| Tanh | 2.7256 | 1.1799 | ||
| 32 | Leaky ReLU | 2.292 | 2.5028 | |
| ReLU | 2.4641 | 3.3524 | ||
| Tanh | 2.4527 | 2.6765 | ||
| 64 | Leaky ReLU | 2.3771 | 2.7930 | |
| ReLU | 2.3828 | 2.8491 | ||
| Tanh | 2.8891 | 1.1901 | ||
| 128 | Leaky ReLU | 2.6264 | 2.3285 | |
| ReLU | 2.4589 | 2.3786 | ||
| Tanh | 2.4291 | 2.3836 | ||
| 2 | 16 | Leaky ReLU | 1.2170 | 2.6885 |
| ReLU | 2.4529 | 1.2117 | ||
| Tanh | 2.5764 | 1.8663 | ||
| 32 | Leaky ReLU | 1.1737 | 1.1863 | |
| ReLU | 2.4806 | 1.1755 | ||
| Tanh | 2.3103 | 1.8573 | ||
| 64 | Leaky ReLU | 2.4558 | 2.4421 | |
| ReLU | 2.5516 | 1.8231 | ||
| Tanh | 2.6790 | 1.8164 | ||
| 128 | Leaky ReLU | 2.7573 | 3.3301 | |
| ReLU | 2.6885 | 2.3767 | ||
| Tanh | 2.7142 | 1.1875 | ||
| Actual Class | Total | Predicted Class | True Positive Rate (%) | False Negative Rate (%) | |
|---|---|---|---|---|---|
| Accurate | Inaccurate | ||||
| Accurate | 864,022 | 860,716 | 3306 | 99.6173 | 0.3826 |
| Inaccurate | 40,996 | 5171 | 35,825 | 87.3865 | 12.6134 |
| Actual Class | Total | Predicted Class | True Positive Rate (%) | False Negative Rate (%) | |
|---|---|---|---|---|---|
| Accurate | Inaccurate | ||||
| Accurate | 863,856 | 860,438 | 3418 | 99.6043 | 0.3956 |
| Inaccurate | 41,162 | 5596 | 35,566 | 86.4049 | 13.5950 |
| Accurate Class | Inaccurate Class | ||
|---|---|---|---|
| BiLSTM | RA | 99.6173 | 87.3865 |
| DEC | 99.6043 | 86.4049 | |
| Forward LSTM | RA | 99.4742 | 83.5989 |
| DEC | 95.4365 | 34.5017 | |
| Backward LSTM | RA | 99.5834 | 84.4987 |
| DEC | 95.5991 | 64.3418 | |
| Parameter | Value | |
|---|---|---|
| Initial epoch | 2,458,860.75 Julian Date | |
| Time of flight | 6 h | |
| Number of measurements | 361 | |
| Initial state (ECI frame) | −238,078.6112 km | |
| 251,708.0350 km | ||
| 132,135.5595 km | ||
| −1.5244 km/s | ||
| −0.8960 km/s | ||
| −0.8935 km/s | ||
| Method | Index | Measurement Duration (Hour) | ||||
|---|---|---|---|---|---|---|
| 2 | 3 | 4 | 5 | 6 | ||
| BiLSTM-LSM | 108.0226 | 52.2082 | 26.4953 | 18.6093 | 13.3092 | |
| 30.3310 | 14.1457 | 7.9966 | 5.1123 | 4.1821 | ||
| LSM | 122.7295 | 57.0202 | 28.7276 | 20.4697 | 14.4617 | |
| 34.0102 | 15.4605 | 8.8635 | 5.6236 | 4.6241 | ||
| LSAR | 149.8743 | 69.5296 | 35.8228 | 25.4228 | 18.7784 | |
| 39.0967 | 18.6796 | 11.4537 | 7.0075 | 6.0896 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Shi, Y.; Zheng, Z. Improving Angle-Only Orbit Determination Accuracy for Earth–Moon Libration Orbits Using a Neural-Network-Based Approach. Remote Sens. 2024, 16, 3287. https://doi.org/10.3390/rs16173287
Zhang Z, Shi Y, Zheng Z. Improving Angle-Only Orbit Determination Accuracy for Earth–Moon Libration Orbits Using a Neural-Network-Based Approach. Remote Sensing. 2024; 16(17):3287. https://doi.org/10.3390/rs16173287
Chicago/Turabian StyleZhang, Zhe, Yishuai Shi, and Zuoxiu Zheng. 2024. "Improving Angle-Only Orbit Determination Accuracy for Earth–Moon Libration Orbits Using a Neural-Network-Based Approach" Remote Sensing 16, no. 17: 3287. https://doi.org/10.3390/rs16173287
APA StyleZhang, Z., Shi, Y., & Zheng, Z. (2024). Improving Angle-Only Orbit Determination Accuracy for Earth–Moon Libration Orbits Using a Neural-Network-Based Approach. Remote Sensing, 16(17), 3287. https://doi.org/10.3390/rs16173287