

A VMD-SVM Method for LEO Satellite Orbit Prediction with Space Weather Parameters

Abstract

1. Introduction
- (1)
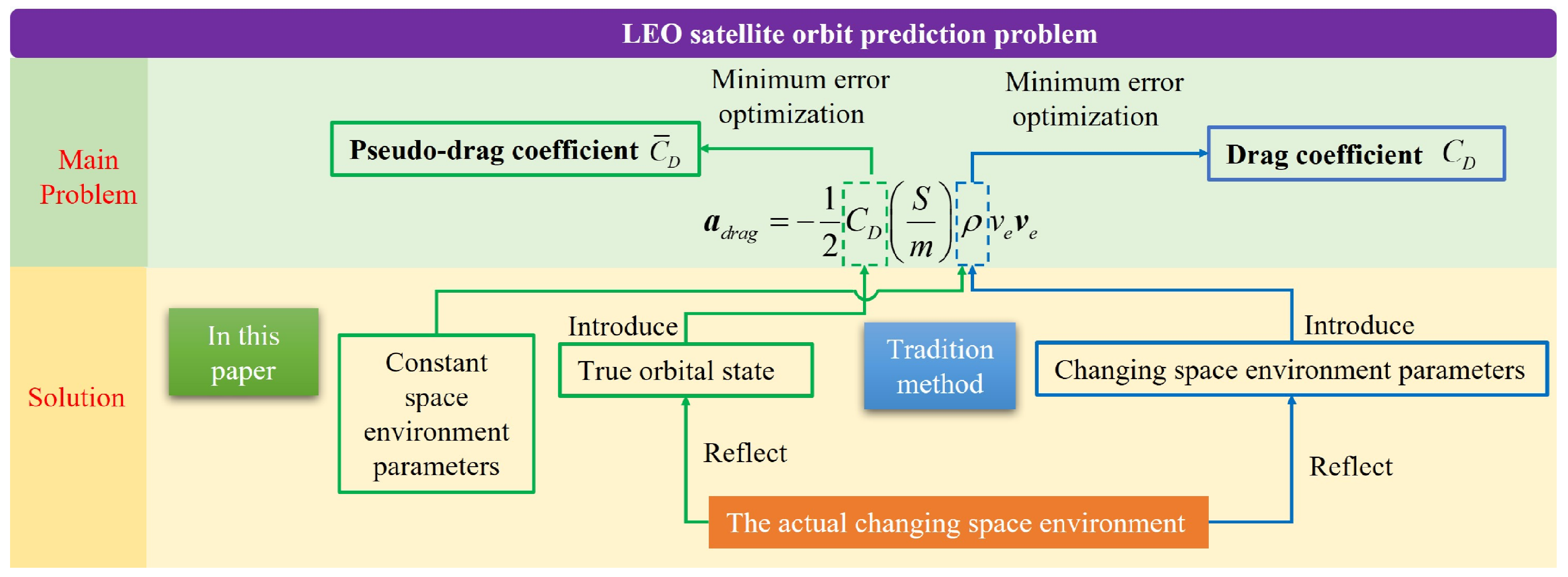
- The concept of the pseudo-drag coefficient is defined, relating space weather to the atmospheric drag model and transforming the OP problem of LEO satellites into a pseudo-drag coefficient prediction problem.
- (2)
- The correlation between space weather parameters and the pseudo-drag coefficient is analyzed using the VMD method, which shows a strong correlation. Additionally, the space weather feature variables required for ML input can be derived from this analysis.
- (3)
- The prediction model for the pseudo-drag coefficient is established using ML, and it can improve the precision of OP when integrated into the orbital dynamics model.
2. The LEO Satellite OP Problem and Method
2.1. Description and Analysis of the Problem
2.2. Method
2.2.1. Motivation
2.2.2. VMD-SVM Framework
3. VMD-Based Analysis of Space Weather and the Pseudo-Drag Coefficient
3.1. Concept of the Pseudo-Drag Coefficient
- Concept
- B.
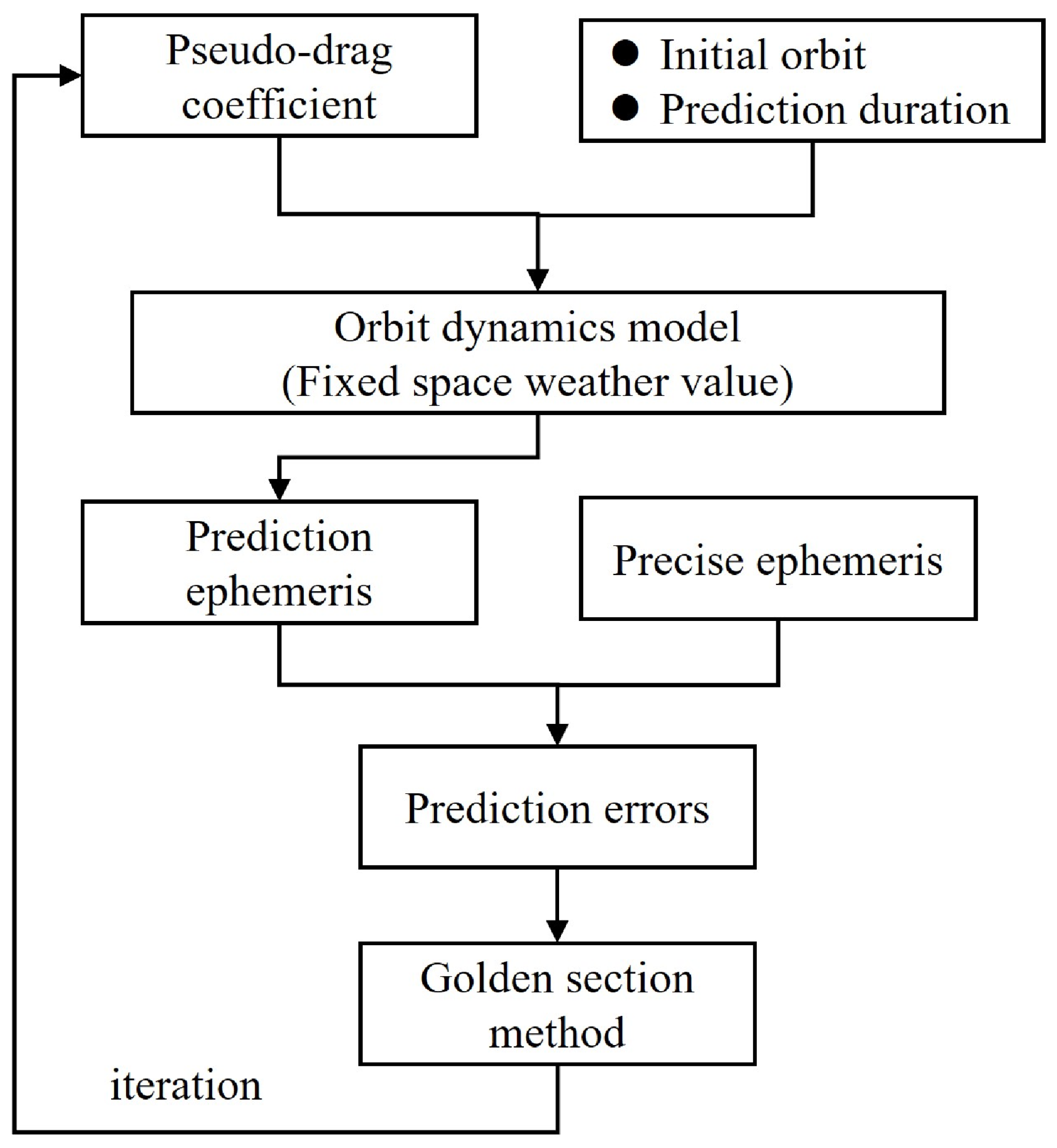
- Compute
- C.
- Validate
- (1)
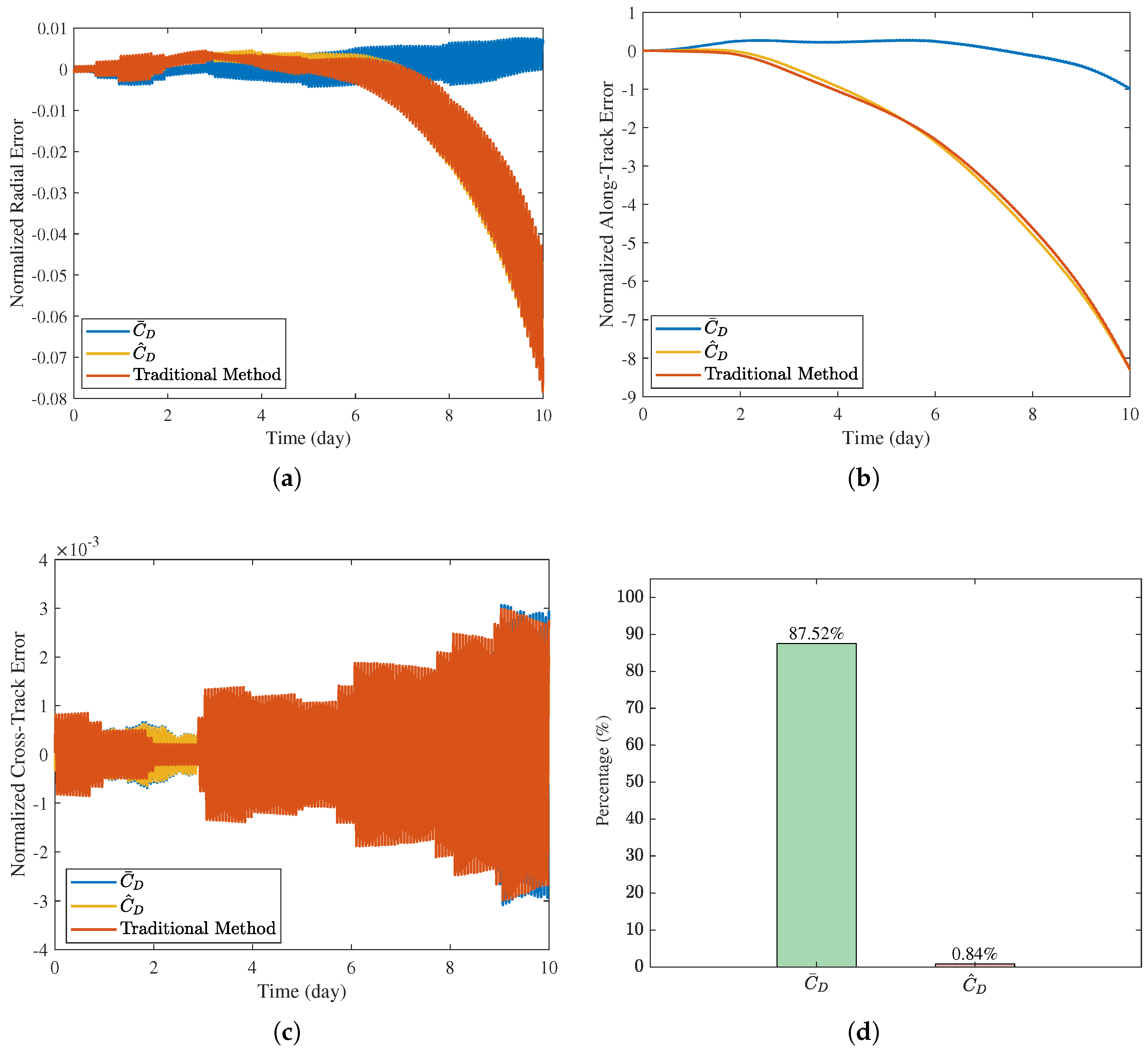
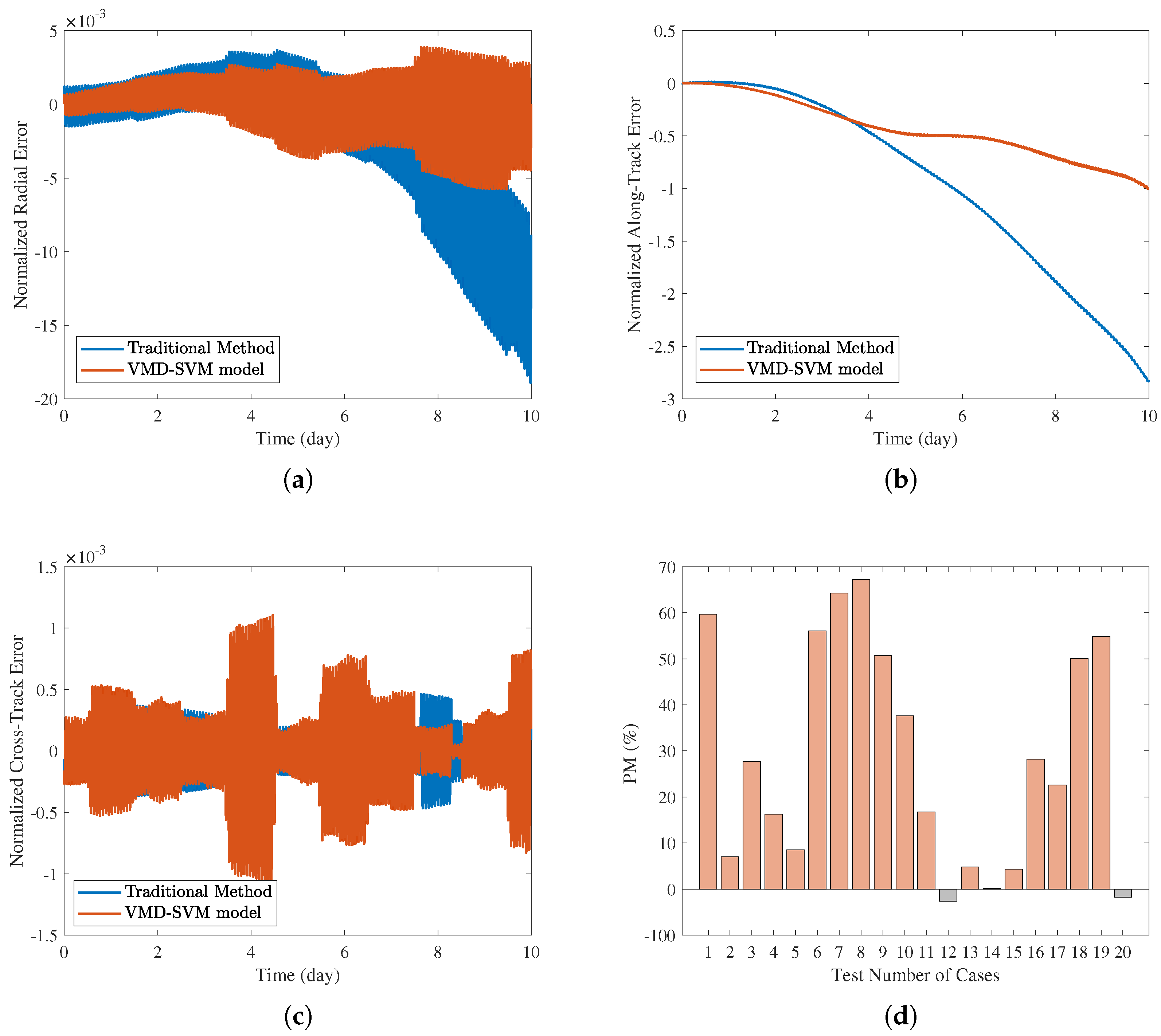
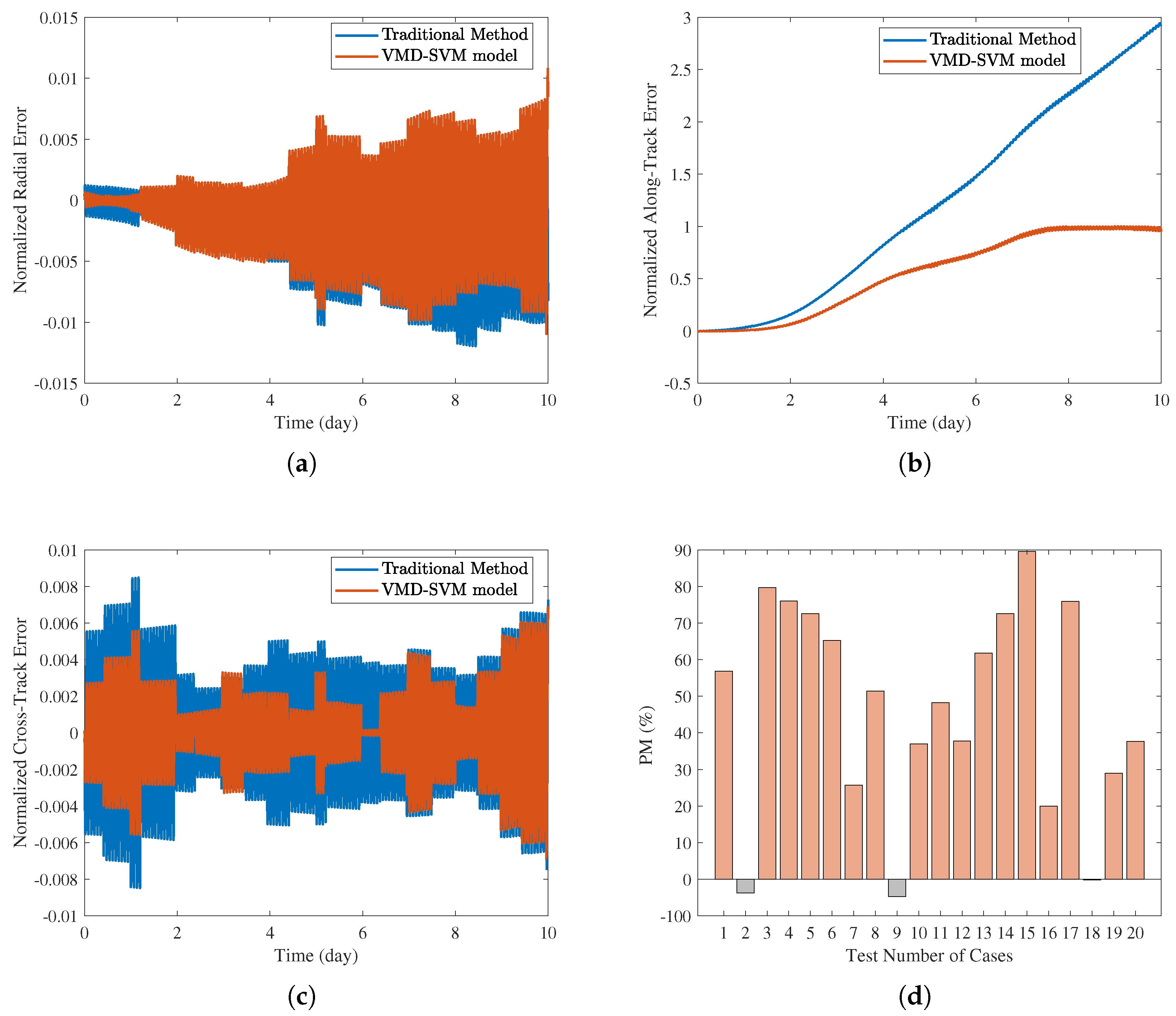
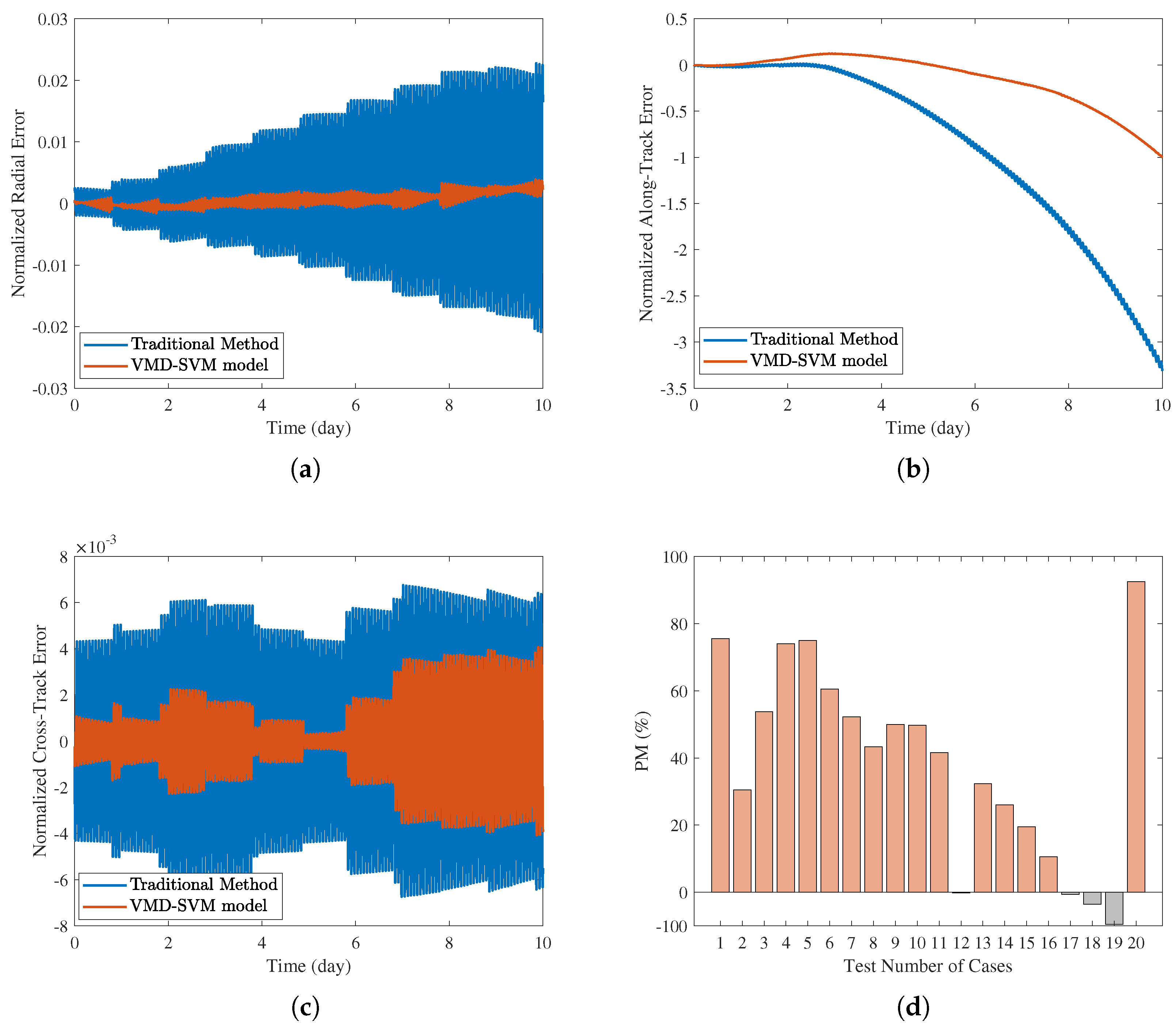
- The OP error of the LEO satellite is mainly in the along-track direction, the error being significantly greater in magnitude than that in the radial and cross-track directions.
- (2)
- can effectively absorb OP errors, which primarily affect the along-track error. The radial error is much smaller than the along-track error but can still be improved, while the cross-track error has little effect.
- (3)
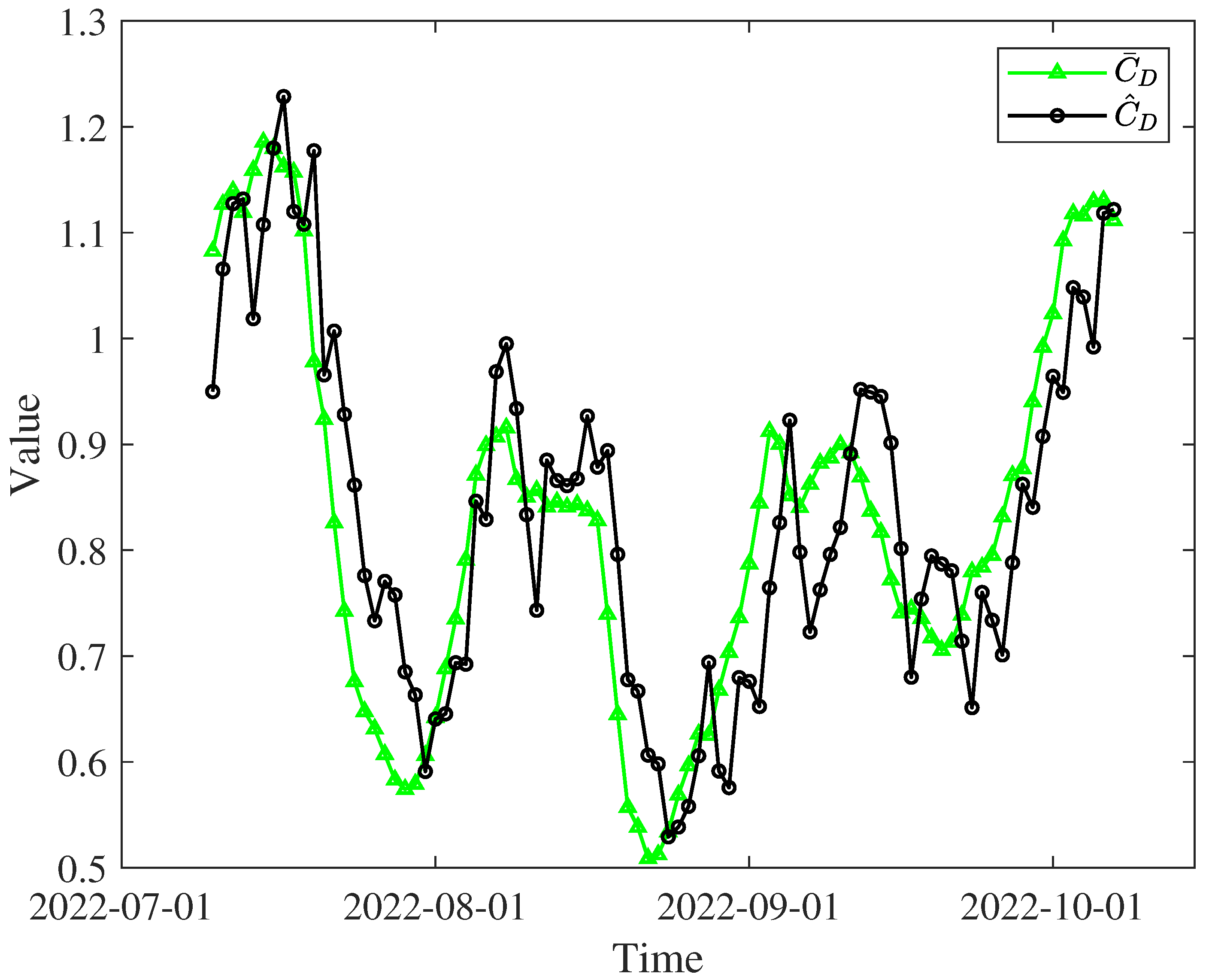
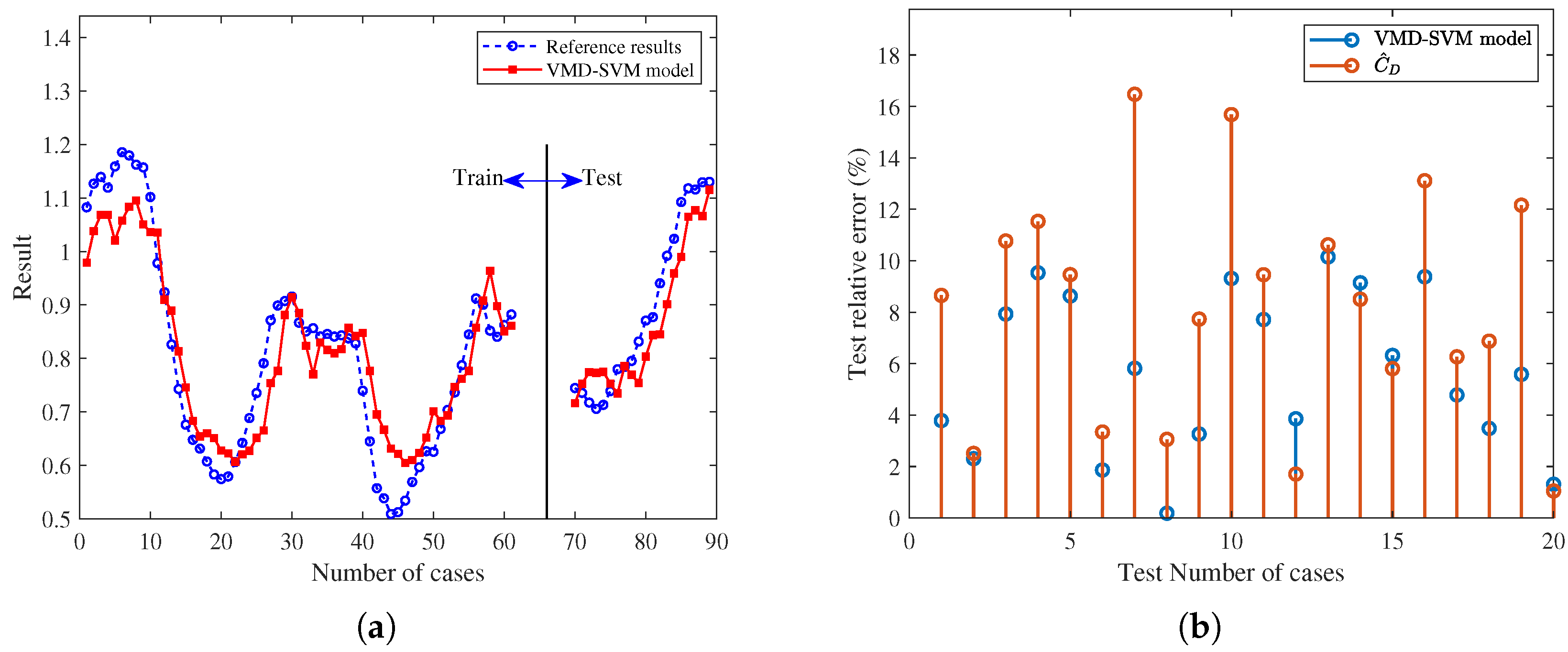
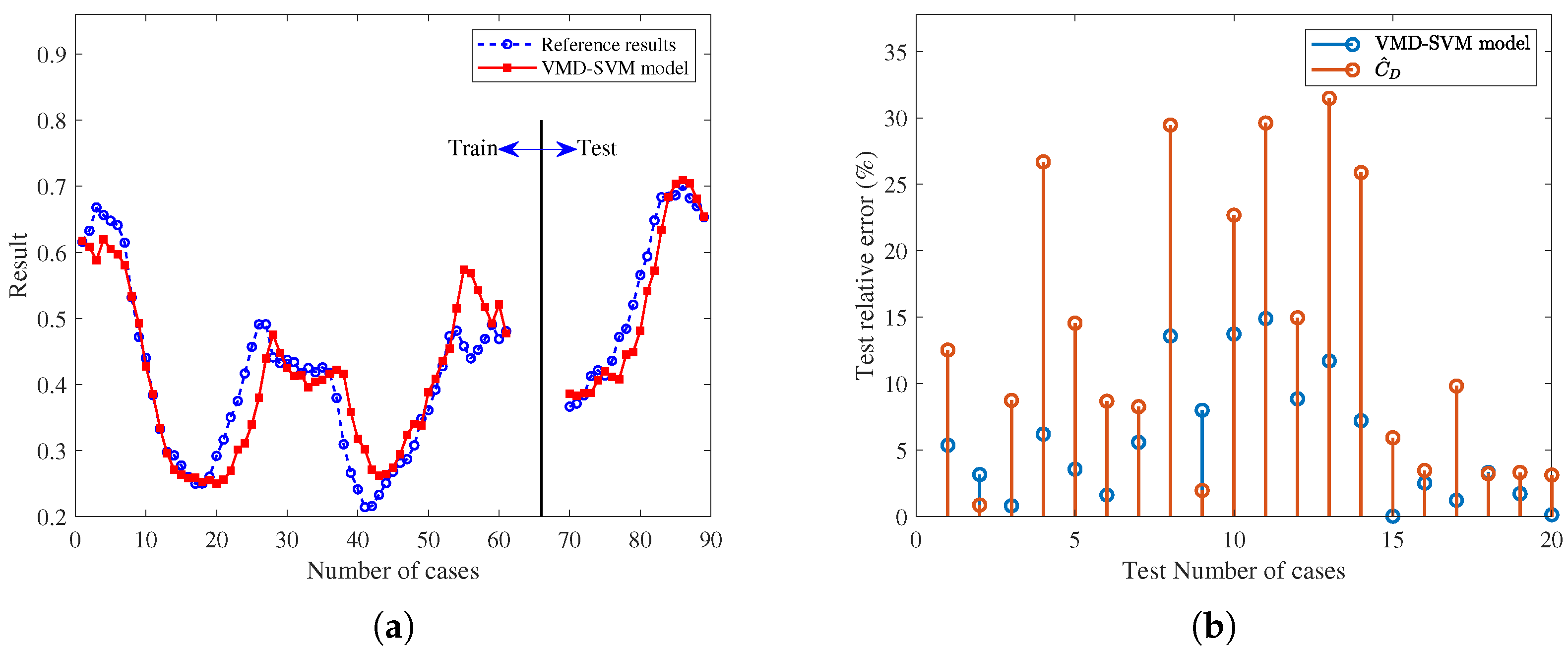
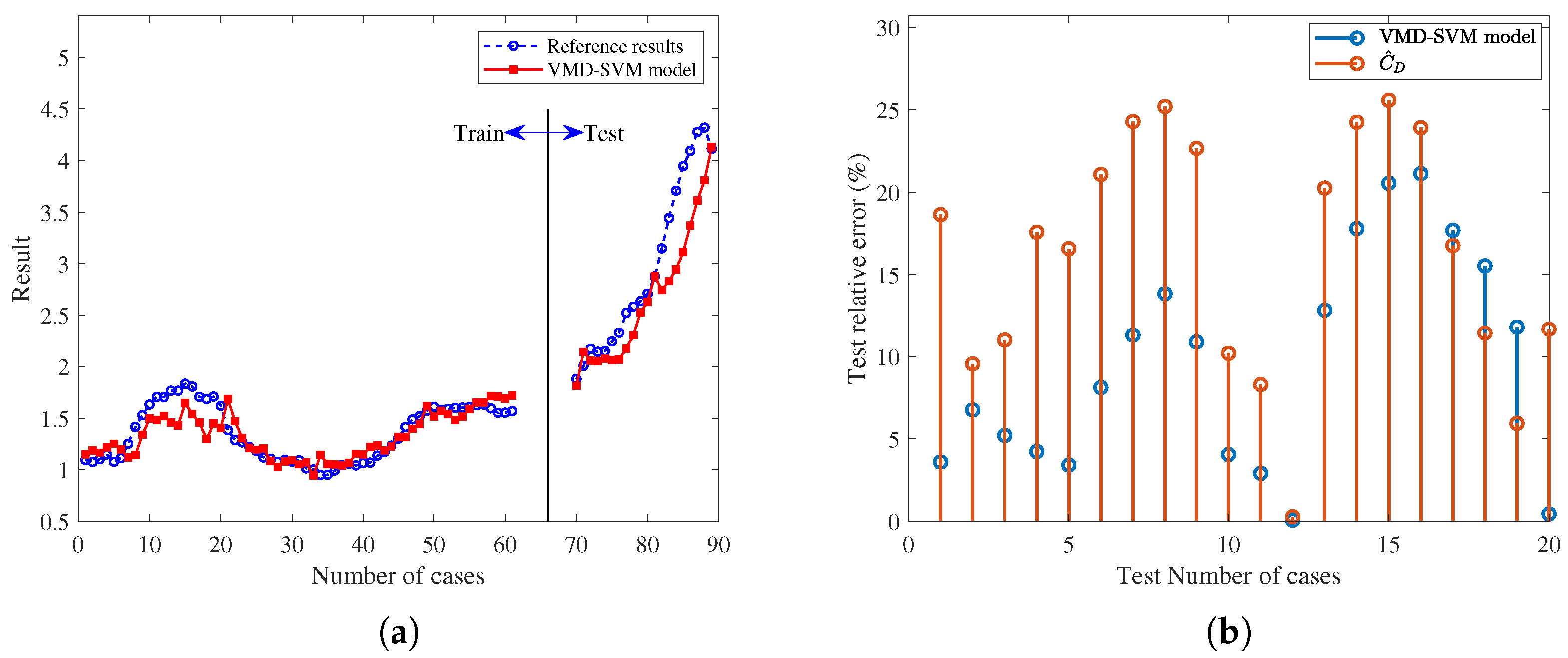
- The prediction of the can approximately represent the results of the traditional method.
3.2. Data Preprocessing Using VMD
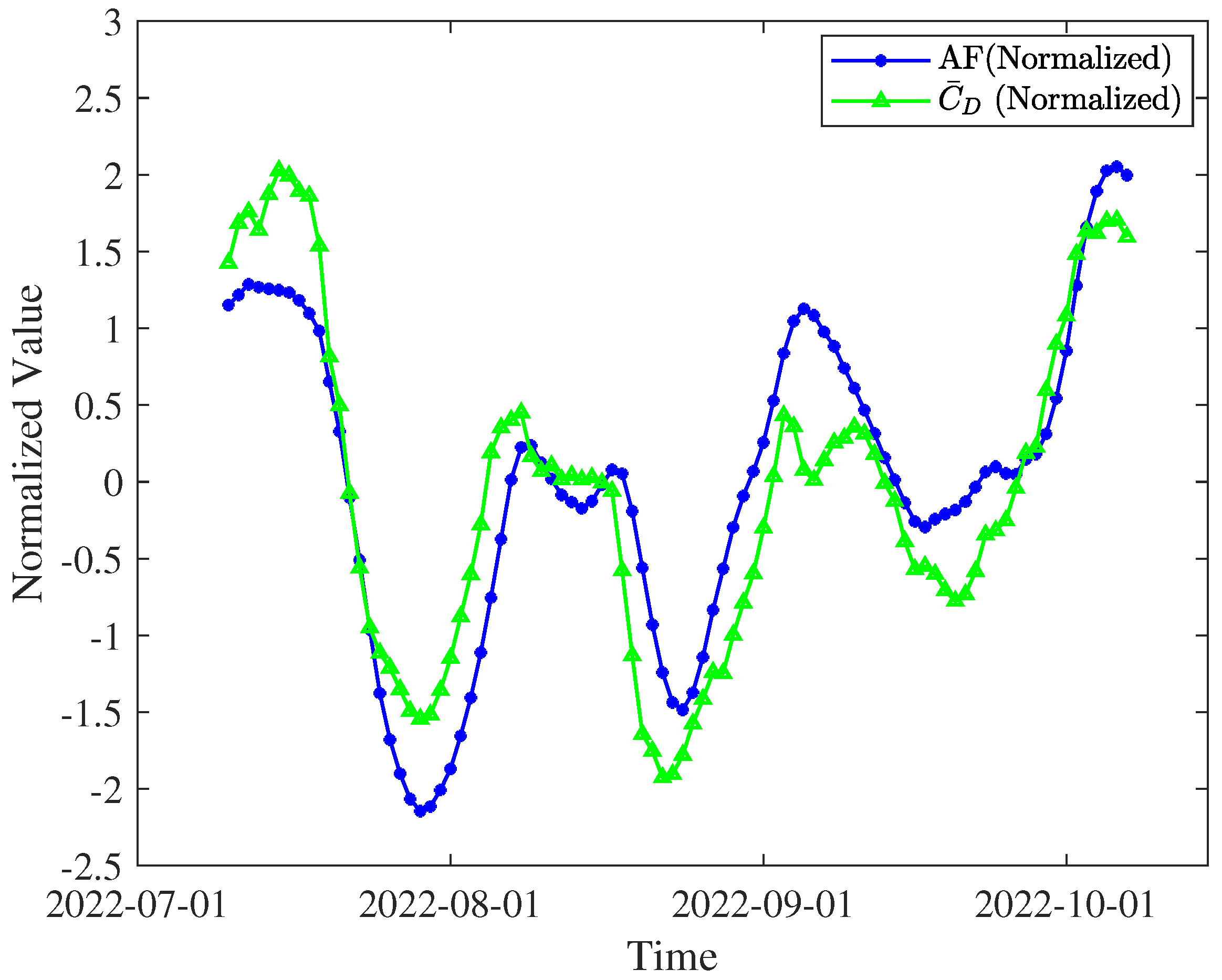
3.3. Correlation of Space Weather and Pseudo-Drag Coefficient
4. OP Based on ML
4.1. Training Model Using ML
4.2. Model Design and Application
4.3. Performance Metric
5. Experimental Results
5.1. Experimental Background and Data Preparation
5.2. ML-Based OP and Quantitative Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lal, B.; Balakrishnan, A.; Caldwell, B.M.; Buenconsejo, R.S.; Carioscia, S.A. Global Trends in Space Situational Awareness (SSA) and Space Traffic Management (STM); Institute for Defense Analyses: Frederick, MD, USA, 2022. [Google Scholar]
- Yue, P.; An, J.; Zhang, J.; Ye, J.; Pan, G.; Wang, S.; Xiao, P.; Hanzo, L. Low earth orbit satellite security and reliability: Issues, solutions, and the road ahead. IEEE Commun. Surv. Tutor. 2023, 25, 1604–1652. [Google Scholar] [CrossRef]
- Zhang, Z.; Shi, Y.; Zheng, Z. Improving Angle-Only Orbit Determination Accuracy for Earth–Moon Libration Orbits Using a Neural-Network-Based Approach. Remote Sens. 2024, 16, 3287. [Google Scholar] [CrossRef]
- Vallado, D.A. Fundamentals of Astrodynamics and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Chen, L.; Bai, X.Z.; Liang, Y.G.; Li, K.B.; Chen, L.; Bai, X.Z.; Li, K.B. Orbital Prediction Error Propagation of Space Objects. In Orbital Data Applications for Space Objects: Conjunction Assessment and Situation Analysis; Springer: Berlin/Heidelberg, Germany, 2017; pp. 23–75. [Google Scholar]
- McLaughlin, C.A.; Hiatt, A.; Lechtenberg, T. Precision orbit derived total density. J. Spacecr. Rocket. 2011, 48, 166–174. [Google Scholar] [CrossRef]
- Emmert, J.T.; Warren, H.P.; Segerman, A.M.; Byers, J.M.; Picone, J.M. Propagation of atmospheric density errors to satellite orbits. Adv. Space Res. 2017, 59, 147–165. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Artificial neural network-based machine learning approach to improve orbit prediction accuracy. J. Spacecr. Rocket. 2018, 55, 1248–1260. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Exploring capability of support vector machine for improving satellite orbit prediction accuracy. J. Aerosp. Inf. Syst. 2018, 15, 366–381. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Improving orbit prediction accuracy through supervised machine learning. Adv. Space Res. 2018, 61, 2628–2646. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Gaussian processes for improving orbit prediction accuracy. Acta Astronaut. 2019, 161, 44–56. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y.; Huang, J.; Sang, J. Improved orbit predictions using two-line elements through errors pattern mining and transferring. Acta Astronaut. 2021, 188, 405–415. [Google Scholar] [CrossRef]
- Zhai, M.; Huyan, Z.; Hu, Y.; Jiang, Y.; Li, H. Improvement of orbit prediction accuracy using extreme gradient boosting and principal component analysis. Open Astron. 2022, 31, 229–243. [Google Scholar] [CrossRef]
- Huang, W.; Tang, R.; Qu, G.; Zhang, F. An XGBoost-Based Method for Improved Orbit Prediction With an Orbit-Separate Modeling Strategy. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 4887–4895. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. Fusion of a machine learning approach and classical orbit predictions. Acta Astronaut. 2021, 184, 222–240. [Google Scholar] [CrossRef]
- Peng, H.; Bai, X. A medium-scale study of using machine learning fusion to improve TLE prediction precision without external information. Acta Astronaut. 2023, 204, 477–491. [Google Scholar] [CrossRef]
- Haidar-Ahmad, J.; Khairallah, N.; Kassas, Z.M. A hybrid analytical-machine learning approach for LEO satellite orbit prediction. In Proceedings of the 2022 25th International Conference on Information Fusion, Linköping, Sweden, 5 July 2022. [Google Scholar]
- Marcos, F.A. Accuracy of atmospheric drag models at low satellite altitudes. Adv. Space Res. 1990, 10, 417–422. [Google Scholar] [CrossRef]
- Doornbos, E.; Klinkrad, H. Modelling of space weather effects on satellite drag. Adv. Space Res. 2006, 37, 1229–1239. [Google Scholar] [CrossRef]
- Storz, M.F.; Bowman, B.R.; Branson, M.J.I.; Casali, S.J.; Tobiska, W.K. High accuracy satellite drag model (HASDM). Adv. Space Res. 2005, 36, 2497–2505. [Google Scholar] [CrossRef]
- Emmert, J.T. Thermospheric mass density: A review. Adv. Space Res. 2015, 56, 773–824. [Google Scholar] [CrossRef]
- Picone, J.M.; Emmert, J.T.; Lean, J.L. Thermospheric densities derived from spacecraft orbits: Accurate processing of two-line element sets. J. Geophys. Res.-Space Phys. 2005, 110, A03301. [Google Scholar] [CrossRef]
- Doornbos, E.; Klinkrad, H.; Visser, P.N.A.M. Atmospheric density calibration using satellite drag observations. Adv. Space Res. 2005, 36, 515–521. [Google Scholar] [CrossRef]
- Bruinsma, S.; Tamagnan, D.; Biancale, R. Atmospheric densities derived from CHAMP/STAR accelerometer observations. Planet Space Sci. 2004, 52, 297–312. [Google Scholar] [CrossRef]
- Sutton, E.K.; Nerem, R.S.; Forbes, J.M. Density and winds in the thermosphere deduced from accelerometer data. J. Spacecr. Rocket. 2007, 44, 1210–1219. [Google Scholar] [CrossRef]
- Calabia, A.; Jin, S. New modes and mechanisms of thermospheric mass density variations from GRACE accelerometers. J. Geophys. Res.-Space Phys. 2016, 121, 191–212. [Google Scholar] [CrossRef]
- Calabia, A.; Jin, S. Thermospheric density estimation and responses to the March 2013 geomagnetic storm from GRACE GPS-determined precise orbits. J. Atmos. Sol.-Terr. Phys. 2017, 154, 167–179. [Google Scholar] [CrossRef]
- Calabia, A.; Jin, S. Upper-Atmosphere Mass Density Variations From CASSIOPE Precise Orbits. Space Weather 2021, 19, e2020SW002645. [Google Scholar] [CrossRef]
- Pérez, D.; Bevilacqua, R. Neural Network based calibration of atmospheric density models. Acta Astronaut. 2015, 110, 58–76. [Google Scholar] [CrossRef]
- Sakai, T.; Takahashi, Y. Atmospheric Density Estimation in Very Low Earth Orbit Based on Nanosatellite Measurement Data Using Machine Learning. Aerosp. Sci. Technol. 2024, 153, 109418. [Google Scholar] [CrossRef]
- Weng, L.; Lei, J.; Zhong, J.; Dou, X.; Fang, H. A machine-learning approach to derive long-term trends of thermospheric density. Geophys. Res. Lett. 2020, 47, e2020GL087140. [Google Scholar] [CrossRef]
- Wang, R.; Liu, J.; Zhang, Q.M. Propagation errors analysis of TLE data. Adv. Space Res. 2009, 43, 1065–1069. [Google Scholar] [CrossRef]
- Cimmino, N.; Opromolla, R.; Fasano, G. Machine learning-based approach for ballistic coefficient estimation of resident space objects in LEO. Adv. Space Res. 2023, 71, 5007–5025. [Google Scholar] [CrossRef]
- Paul, S.N.; Sheridan, P.L.; Licata, R.J.; Mehta, P.M. Stochastic modeling of physical drag coefficient–Its impact on orbit prediction and space traffic management. Adv. Space Res. 2023, 72, 922–939. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Hammer, B.; Gersmann, K. A note on the universal approximation capability of support vector machines. Neural Process. Lett. 2003, 17, 43–53. [Google Scholar] [CrossRef]
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
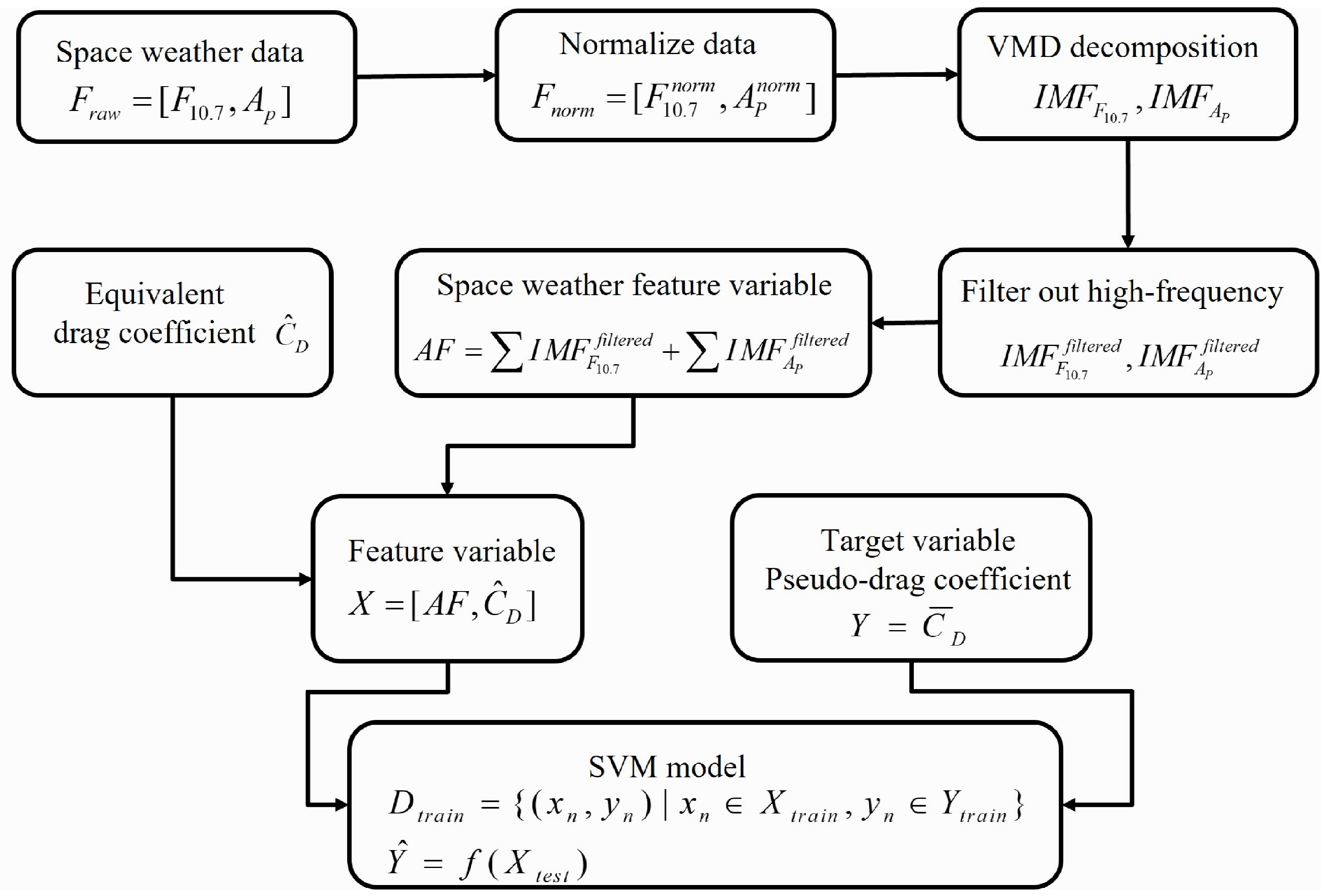
| Step | Description |
|---|---|
| 1 | Input the original space weather time series data and . Represent the raw data as . |
| 2 | Perform data normalization (Z-score) to eliminate dimensional effects. Represent the normalized data as . |
| 3 | Decompose the normalized signal using variational mode decomposition (VMD) into K intrinsic mode functions (IMFs). Represent the IMF components as . |
| 4 | Decompose the normalized signal using variational mode decomposition (VMD) into K intrinsic mode functions (IMFs). Represent the IMF components as . |
| 5 | Filter out high-frequency noise components from and . Represent the filtered IMFs as and . |
| 6 | Construct the space weather feature variable by summing all the remaining filtered IMFs from both and . Represent the accumulated feature as . |
| 7 | Combine with the equivalent drag coefficient to form the input feature X, represented as . |
| 8 | Divide the dataset into a training set and a testing set in chronological order. |
| 9 | Define the target variable as , with the training set represented as . |
| 10 | Select the radial basis function (RBF) as the kernel for the support vector machine (SVM) and initialize the hyperparameters. |
| 11 | Train the SVM model on by iteratively optimizing the model parameters to minimize the prediction error on the training set. |
| 12 | Input the testing set and use the trained SVM model to predict the output , achieving pseudo-drag coefficient prediction. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Liao, J.; Luo, Y.; Meng, Y. A VMD-SVM Method for LEO Satellite Orbit Prediction with Space Weather Parameters. Remote Sens. 2025, 17, 746. https://doi.org/10.3390/rs17050746
Xu H, Liao J, Luo Y, Meng Y. A VMD-SVM Method for LEO Satellite Orbit Prediction with Space Weather Parameters. Remote Sensing. 2025; 17(5):746. https://doi.org/10.3390/rs17050746
Chicago/Turabian StyleXu, Hao, Jiahao Liao, Yufei Luo, and Yunhe Meng. 2025. "A VMD-SVM Method for LEO Satellite Orbit Prediction with Space Weather Parameters" Remote Sensing 17, no. 5: 746. https://doi.org/10.3390/rs17050746
APA StyleXu, H., Liao, J., Luo, Y., & Meng, Y. (2025). A VMD-SVM Method for LEO Satellite Orbit Prediction with Space Weather Parameters. Remote Sensing, 17(5), 746. https://doi.org/10.3390/rs17050746