
A New Data Fusion Method for GNSS/INS Integration Based on Weighted Multiple Criteria


Abstract

1. Introduction
2. Related Theory of the Cubature Kalman Filter and the H∞ Filter
2.1. Models of the Cubature Kalman Filter
- a.
- Time update:
- b.
- Measurement update:
2.2. Principles of the H∞ Filter
- Time update:
- Measurement update:
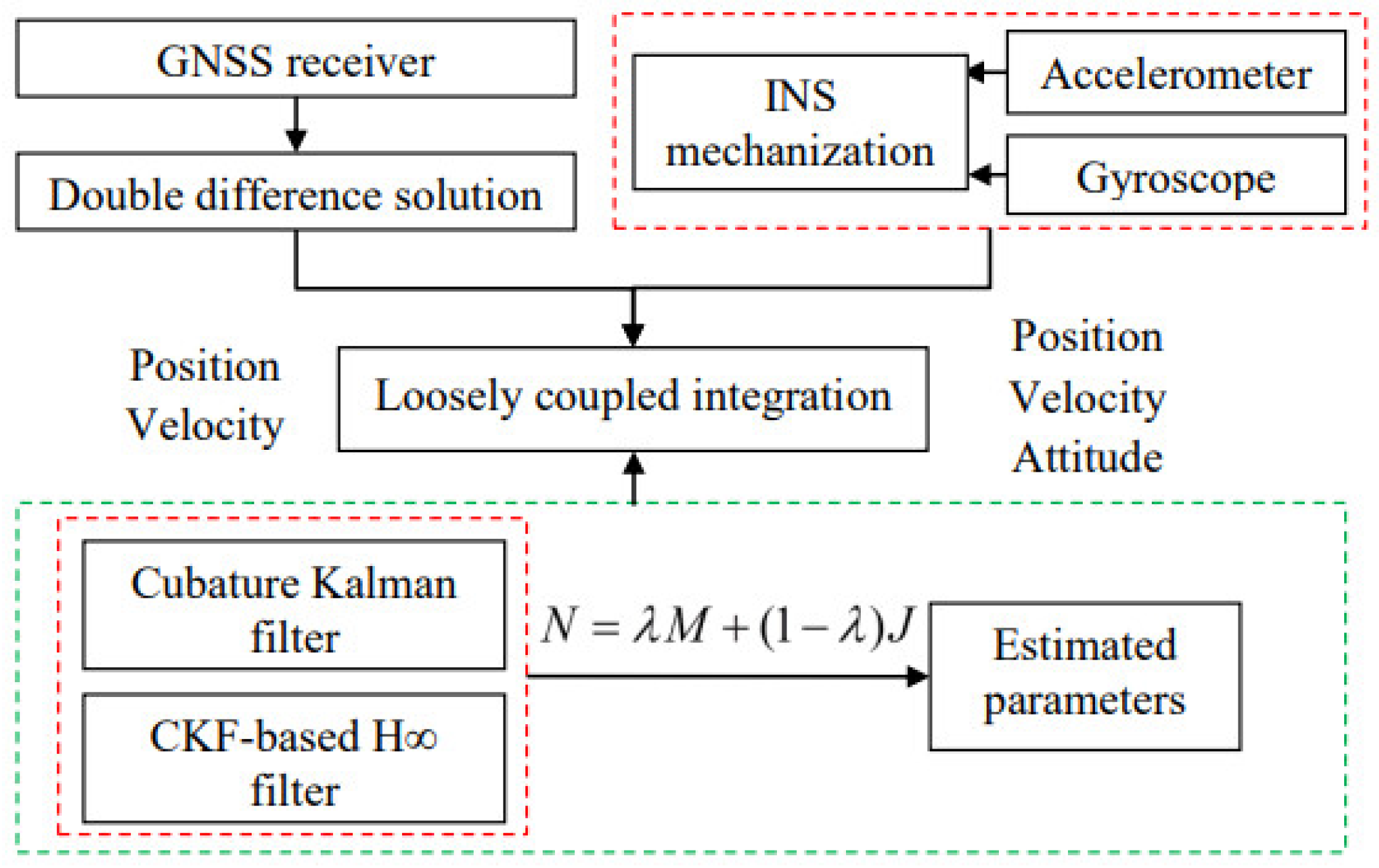
3. Weighted-Multiple-Criteria-Based Data Fusion Algorithm for the GNSS/INS Integration
3.1. Loosely-Coupled GNSS/INS Integrated Navigation Systems
3.2. Weighted-Multiple-Criteria-Based Parameter Estimation Algorithm
3.3. Theoretical Analysis of the Proposed Parameter Estimation Algorithm
4. Test and Analysis
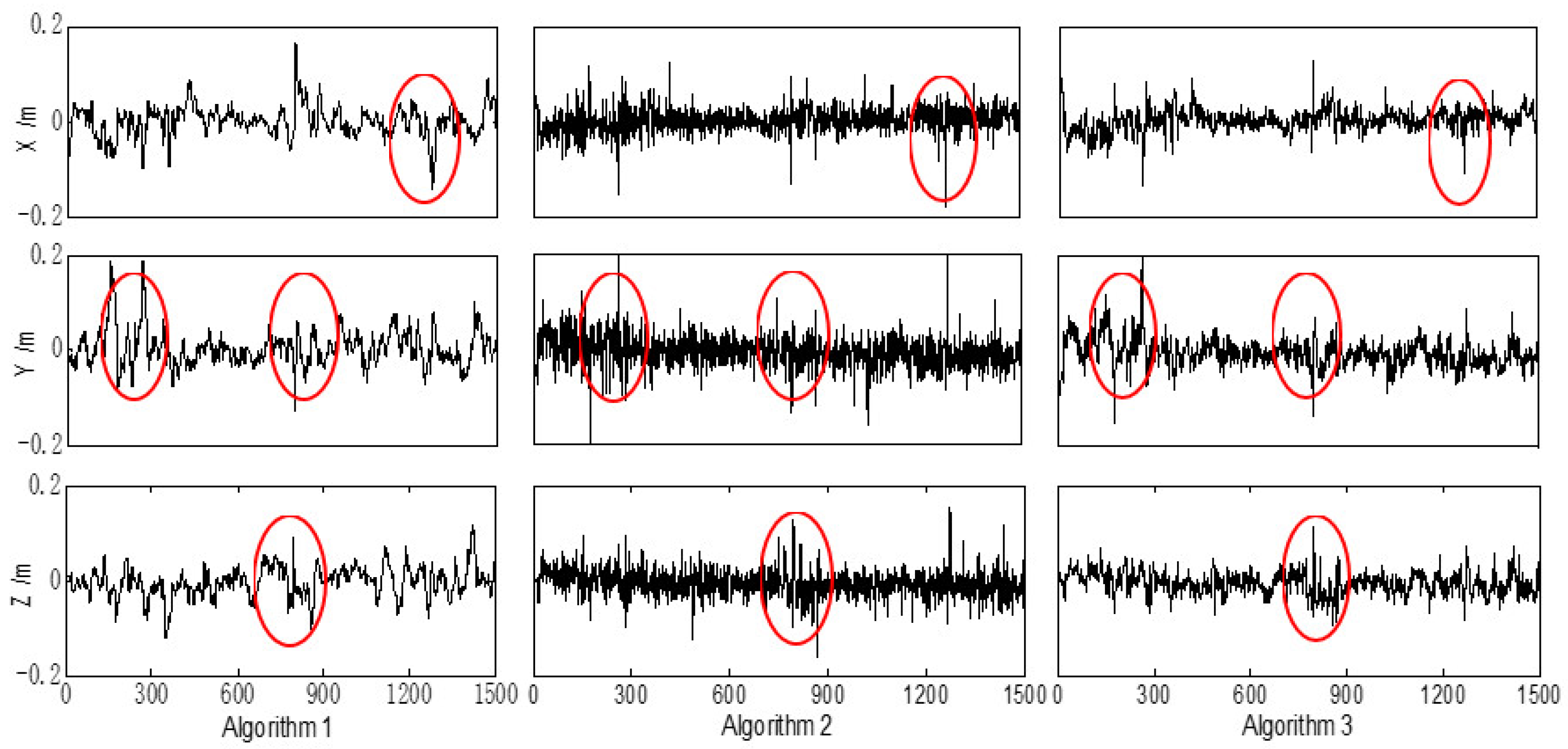
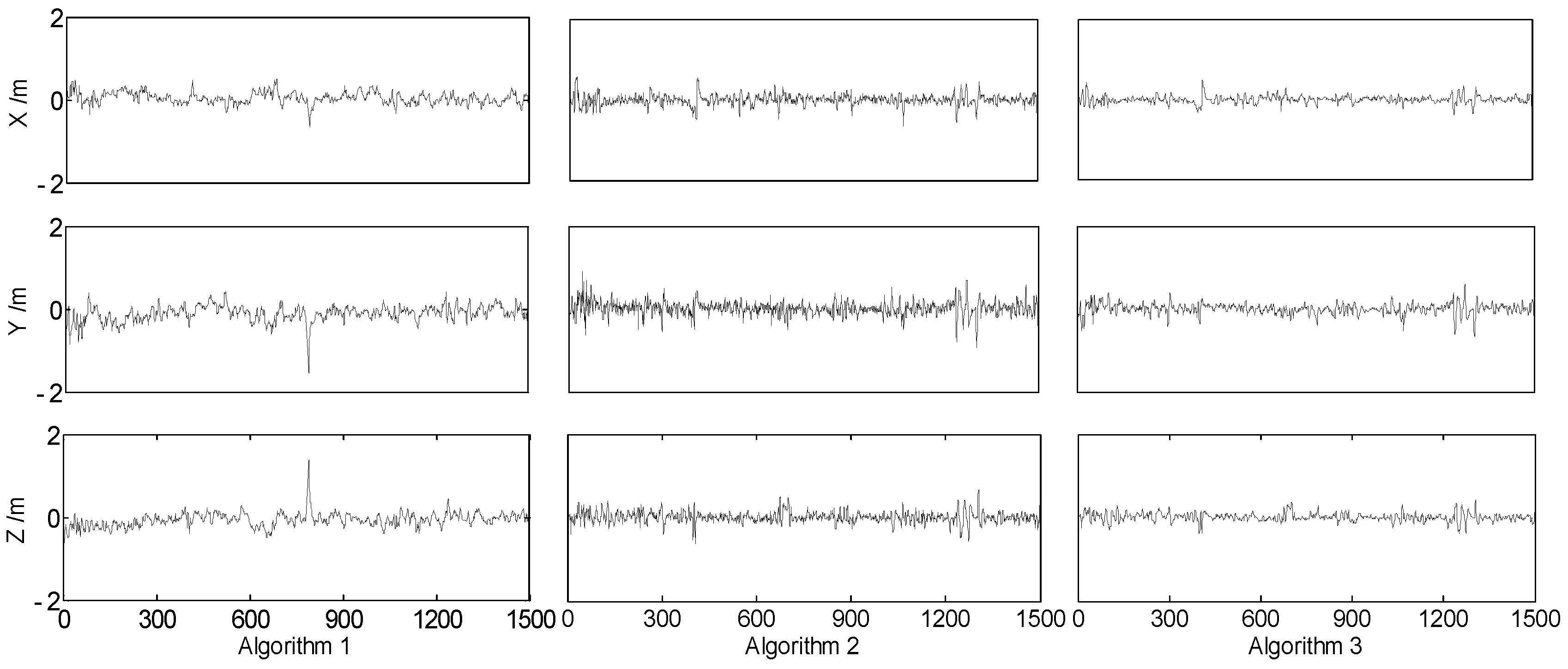
- Algorithm 1: the conventional cubature Kalman filter algorithm (marked as CKF);
- Algorithm 2: the nonlinear H∞ filter algorithm (marked as HF);
- Algorithm 3: the weighted-multiple-criteria-based filter algorithm (λ = 0.5, marked as MCF-0.5).
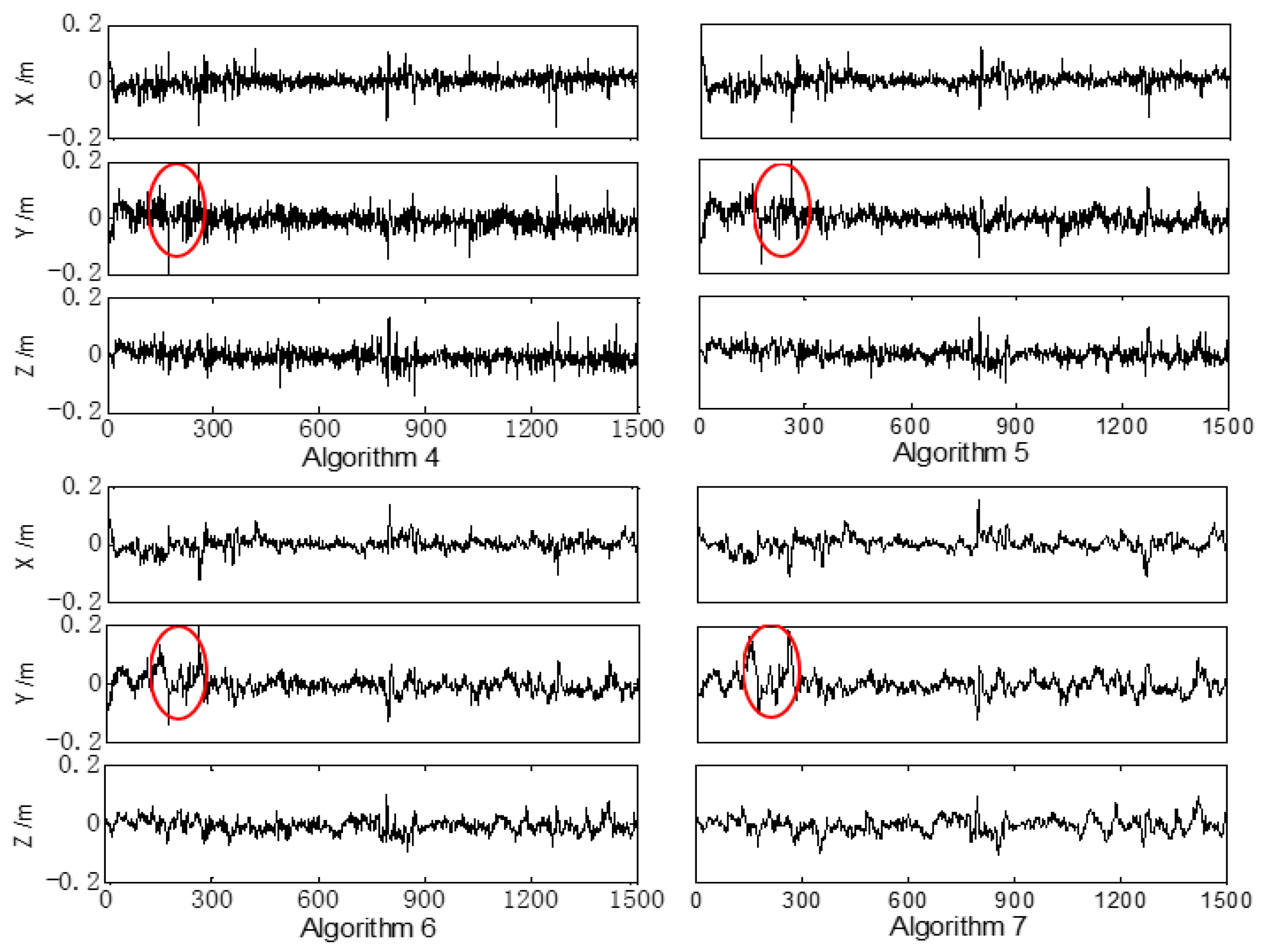
- Algorithm 4: the weighted-multiple-criteria-based filter algorithm (λ = 0.2, marked as MCF-0.2);
- Algorithm 5: the weighted-multiple-criteria-based filter algorithm (λ = 0.4, marked as MCF-0.4);
- Algorithm 6: the weighted-multiple-criteria-based filter algorithm (λ = 0.6, marked as MCF-0.6);
- Algorithm 7: the weighted-multiple-criteria-based filter algorithm (λ = 0.8, marked as MCF-0.8);
- Algorithm 1: the conventional cubature Kalman filter algorithm (marked as CKF);
- Algorithm 2: the nonlinear H∞ filter algorithm (marked as HF);
- Algorithm 3: the weighted-multiple-criteria-based filter algorithm (λ = 0.5, marked as MCF-0.5).
5. Conclusions
- (1)
- The experiments in this paper demonstrate that the H∞ filter manifests superior robustness and precision than the cubature Kalman filter in GNSS/INS integrated navigation systems, but sometimes the H∞ filter may introduce some redundant errors.
- (2)
- By integrating the strengths of different filtering algorithms, the proposed weighted-multiple-criteria-based filtering algorithm with a weight adjustment factor outperforms conventional algorithms based on a single criterion.
- (3)
- Different weight adjustment factors can lead to varying filtering performances. Therefore, selecting an appropriate weight adjustment factor is crucial for achieving precise and stable filtering solutions.
- (4)
- A series of data fusion methods with multiple criteria can be constructed with different criteria and different adjustment factors.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bos, M.S.; Fernandes, R.; Williams, S.; Bastos, L. Fast error analysis of continuous GNSS observations with missing data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef]
- Tang, C.; Shi, H.; Zhang, L. Geomagnetic matching cooperative positioning method for unmanned boat cluster based on factor graph. Ocean Eng. 2024, 296, 116901. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Q.; Zhang, S.; Zheng, N.; Liu, K. A state-domain robust autonomous integrity monitoring with an extrapolation method for single receiver positioning in the presence of slowly growing fault. Satell. Navig. 2023, 4, 20. [Google Scholar] [CrossRef]
- Godha, S.; Cannon, M.E. GPS/MEMS INS integrated system for navigation in urban areas. GPS Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Cui, B.; Chen, X.; Tang, X. Improved cubature Kalman filter for GNSS/INS based on transformation of posterior sigma-points error. IEEE Trans. Signal Process. 2017, 65, 2975–2987. [Google Scholar] [CrossRef]
- Jiang, W.; Liu, D.; Cai, B.; Rizos, C.; ShangGuan, W. A fault-tolerant tightly coupled GNSS/INS/OVS integration vehicle navigation system based on an FDP algorithm. IEEE Trans. Veh. Technol. 2019, 68, 6365–6378. [Google Scholar] [CrossRef]
- Wang, W.; Dong, S.; Wu, W.; Guo, D.; Wang, X.; Song, H. Combining TWSTFT and GPS PPP using a Kalman filter. GPS Solut. 2021, 25, 1–12. [Google Scholar] [CrossRef]
- Kim, D.; Lee, J. Kalman-filter-based integrity evaluation considering fault duration: Application to GNSS-based attitude determination. GPS Solut. 2022, 26, 1–13. [Google Scholar] [CrossRef]
- Marković, L.; Kovač, M.; Milijas, R.; Car, M.; Bogdan, S. Error state extended Kalman filter multi-sensor fusion for unmanned aerial vehicle localization in GPS and magnetometer denied indoor environments. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 July 2022; IEEE: Piscataway, NJ, USA; pp. 184–190. [Google Scholar]
- Impraimakis, M.; Smyth, A.W. An unscented Kalman filter method for real time input-parameter-state estimation. Mech. Syst. Signal Process. 2022, 162, 108026. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations. IEEE Trans. Signal Process. 2010, 4977–4993. [Google Scholar] [CrossRef]
- Zhao, Y. Performance evaluation of cubature Kalman filter in a GPS/IMU tightly-coupled navigation system. Signal Process. 2016, 119, 67–79. [Google Scholar] [CrossRef]
- Chang, G. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Yang, Y. Adaptive Navigation and Kinematic Positioning; Surveying and Mapping Press: Beijing, China, 2006. [Google Scholar]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Wang, J.; Zeng, Q.; Shen, X.; Zhang, Y. Micro aerial vehicle navigation with visual-inertial integration aided by structured light. J. Navig. 2020, 73, 16–36. [Google Scholar] [CrossRef]
- Xia, Q.; Sun, Y.; Zhou, C. An optimal adaptive algorithm for fading Kalman filter and its application. Acta Autom. Sin. 1990, 16, 210–216. [Google Scholar]
- Yang, Y.; Ren, X.; Xu, Y. Main progress of adaptively robust filter with applications in navigation. J. Navig. Position 2013, 1, 9–15. [Google Scholar]
- Almas, M.A.; Sharma, K. A two stage mean and iterative median filter approach for image denoising. Int. J. Adv. Sci. Technol. 2020, 29, 5355–5361. [Google Scholar]
- Xu, P. Sign-constrained robust least squares, subjective breakdown point and the effect of weights of observations on robustness. J. Geod. 2005, 79, 146–159. [Google Scholar] [CrossRef]
- Chang, L.; Li, K.; Hu, B. Huber’s M-estimation-based process uncertainty robust filter for integrated INS/GPS. IEEE Sens. J. 2015, 15, 3367–3374. [Google Scholar]
- Rigatos, G.; Siano, P.; Wira, P.; Busawon, K.; Binns, R. A nonlinear H-infinity control approach for autonomous truck and trailer systems. Unmanned Syst. 2020, 8, 49–69. [Google Scholar] [CrossRef]
- Yang, Y.; He, H.; Xu, G. Adaptively robust filtering for kinematic. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Chandra, K.P.B.; Gu, D.W.; Postlethwaite, I. Fusion of an extended h∞ filter and cubature Kalman filter. IFAC Proc. Vol. 2011, 44, 9091–9096. [Google Scholar] [CrossRef]
- Juneja, A.; Juneja, S.; Bali, V.; Mahajan, S. Multi-criterion decision making for wireless communication technologies adoption in IoT. Int. J. Syst. Dyn. Appl. 2021, 10, 1–15. [Google Scholar] [CrossRef]
- Apkarian, P.; Noll, D.; Rondepierre, A. Mixed H2/H∞ control via nonsmooth optimization. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 6460–6465. [Google Scholar]
- Chen, Y.; Yuan, J. An improved robust H∞ multiple fading fault-tolerant filtering algorithm for INS/GPS integrated navigation. J. Astronaut. 2009, 30, 930–936. [Google Scholar]
- Zhang, Q.; Meng, X.; Zhang, S.; Wang, Y. Singular value decomposition-based robust cubature Kalman filtering for an integrated GPS/SINS navigation system. J. Navig. 2015, 68, 549–562. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Options | Bias | Scale Factor | Random Walk (RW) |
|---|---|---|---|
| Accelerometer | 50 mg | 4000 ppm | 55 μg/rt-Hz (velocity RW) |
| Gyroscope | 20 deg/h (rate bias) | 1500 ppm | 0.067 deg/rt-h (angle RW) |
| Algorithm | Index | Px (cm) | PY (cm) | Vx (cm/s) | VY (cm/s) | Pitch (°) | Yaw (°) |
|---|---|---|---|---|---|---|---|
| CKF | RMS | 3.26 | 3.86 | 0.79 | 1.03 | 0.12 | 0.45 |
| HF | 2.72 | 3.36 | 0.53 | 0.81 | 0.10 | 0.37 | |
| MCF-0.5 | 2.37 | 3.02 | 0.30 | 0.51 | 0.09 | 0.29 | |
| CKF | SD | 3.26 | 3.84 | 0.78 | 1.02 | 0.12 | 0.30 |
| HF | 2.71 | 3.40 | 0.53 | 0.80 | 0.10 | 0.32 | |
| MCF-0.5 | 2.36 | 2.98 | 0.30 | 0.51 | 0.09 | 0.25 |
| Algorithm | Index | Px (cm) | PY (cm) | Vx (cm/s) | VY (cm/s) | Pitch (°) | Yaw (°) |
|---|---|---|---|---|---|---|---|
| MCF-0.2 | RMS | 2.53 | 3.19 | 0.25 | 0.43 | 0.09 | 0.36 |
| MCF-0.4 | 2.41 | 3.03 | 0.27 | 0.46 | 0.09 | 0.32 | |
| MCF-0.5 | 2.37 | 3.02 | 0.30 | 0.51 | 0.09 | 0.29 | |
| MCF-0.6 | 2.40 | 3.07 | 0.39 | 0.66 | 0.10 | 0.26 | |
| MCF-0.8 | 2.66 | 3.35 | 0.46 | 0.72 | 0.10 | 0.22 | |
| MCF-0.2 | SD | 2.48 | 3.13 | 0.22 | 0.38 | 0.08 | 0.36 |
| MCF-0.4 | 2.40 | 2.98 | 0.28 | 0.46 | 0.09 | 0.29 | |
| MCF-0.5 | 2.36 | 2.98 | 0.30 | 0.51 | 0.09 | 0.25 | |
| MCF-0.6 | 2.39 | 3.06 | 0.45 | 0.60 | 0.10 | 0.24 | |
| MCF-0.8 | 2.62 | 3.21 | 0.49 | 0.75 | 0.10 | 0.20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Zhang, Q.; Zhao, D. A New Data Fusion Method for GNSS/INS Integration Based on Weighted Multiple Criteria. Remote Sens. 2024, 16, 3275. https://doi.org/10.3390/rs16173275
Jiang C, Zhang Q, Zhao D. A New Data Fusion Method for GNSS/INS Integration Based on Weighted Multiple Criteria. Remote Sensing. 2024; 16(17):3275. https://doi.org/10.3390/rs16173275
Chicago/Turabian StyleJiang, Chen, Qiuzhao Zhang, and Dongbao Zhao. 2024. "A New Data Fusion Method for GNSS/INS Integration Based on Weighted Multiple Criteria" Remote Sensing 16, no. 17: 3275. https://doi.org/10.3390/rs16173275
APA StyleJiang, C., Zhang, Q., & Zhao, D. (2024). A New Data Fusion Method for GNSS/INS Integration Based on Weighted Multiple Criteria. Remote Sensing, 16(17), 3275. https://doi.org/10.3390/rs16173275