1. Introduction
Polarimetric maritime radars have been extensively investigated due to the diversity in radar echo polarization [
1,
2]. Fully polarimetric radars typically operate with four linear polarimetric channels: HH, HV, VH, and VV [
3]. The polarization diversity characteristics of multiple polarization channels can result in a higher chance of detecting the target signal from a clutter background compared to a single polarization channel. The target and sea clutter observed in these channels show varying mean power, non-Gaussian characteristics, and pulse correlation. The accurate statistical modeling of radar sea clutter is vital for effective adaptive clutter suppression. The compound Gaussian (CG) model is a useful representation of sea clutter data, which considers sea clutter as the texture multiplied by the speckle. The speckle can be conceptualized as a Gaussian random variable. In contrast, the texture can be considered as an unknown constant or a positive random variable. To simplify mathematical treatment, the independence of texture and speckle components is often assumed. During a radar coherent processing interval (CPI), sea clutter in a range cell forms a vector consisting of a fixed texture component. This model then simplifies to a spherical invariant stochastic process model, resulting in a spherical invariant stochastic vector (SIRV) [
4]. By modeling the statistical distribution of the texture, different specific compound Gaussian distribution models can be derived. Common clutter models include the
-distribution [
5], the Pareto distribution [
6], the inverse-Gaussian-texture CG distribution [
7], and the lognormal-texture CG distribution [
8]. These models incorporate a scale parameter for local power, a shape parameter for non-Gaussianity, and a covariance matrix for pulse-to-pulse correlation. It should be emphasized that it is challenging to quantify the parameters, such as radar resolution, grazing angle, carrier frequency, and so forth, for which the CG distribution is optimal. In practice, the goodness-of-fit test can be employed to ascertain which CG distribution the received radar sea clutter data obeys.
The clutter statistical model often guides the design of adaptive coherent detection methods in such cluttered environments. In Gaussian clutter scenarios, Kelly et al. introduced the adaptive generalized likelihood ratio (GLRT) detector [
9] and the adaptive matched filter (AMF) [
10], which are based on one-step and two-step GLRTs, respectively. A constant false alarm rate (CFAR) detector was developed using the Rao test criterion to detect radar targets in Gaussian environments in order to reject mismatched signals better [
11]. While these detectors perform adequately in Gaussian clutter, they struggle with false alarms or missed detections in non-Gaussian clutter. To address adaptive radar target detection in non-Gaussian clutter, researchers model radar clutter using the compound Gaussian model with a specific texture distribution, and then design detectors that match the clutter model. With the assumption that the clutter texture is an unknown constant in each radar range cell, Conte et al. [
12] proposed a normalized AMF (ANMF or NAMF) for suppressing sea clutter and detecting targets. Although ANMF does not rely on the texture distribution, it loses the optimality for texture characteristics. In
-distributed clutter, Jay et al. [
13] developed the optimal
detector (OKD) to match gamma-distributed texture. Zhao et al. [
14] constructed a detector by the maximum eigenvalue of radar echoes to detect targets in
-distributed clutter. Additionally, many adaptive coherent detectors based on texture distributions such as inverse gamma [
15,
16,
17], inverse Gaussian [
18,
19], and lognormal [
20] textures have been proposed.
The detectors mentioned above are limited to processing radar echo data from single polarimetric channels. To utilize radar data from multiple polarimetric channels, Pastina et al. [
21] proposed a polarimetric GLRT detector for target detection against a Gaussian background. For enhanced detection in non-Gaussian clutter, Lombardo et al. [
3] derived a texture-free GLRT detector using polarimetric characteristics. De Maio et al. [
22,
23] designed adaptive detectors by the Rao and Wald tests for polarization detection in non-Gaussian clutter. Kong et al. [
24] developed adaptive polarimetric detectors in unknown-texture CG clutter. Shi et al. [
25] designed a dual-polarimetric persymmetric adaptive subspace detector in unknown-texture CG clutter. Kang et al. [
26] introduced adaptive dual-polarimetric localization detectors for energy-leaked targets in unknown-texture compound Gaussian clutter. Wang et al. [
27,
28] proposed several adaptive detectors in inverse-Gaussian-texture CG clutter by exploiting polarimetric information.
Although several texture distributions describing the non-Gaussianity of sea clutter are available, validation results based on some of the measured radar sea clutter data show the advantage of the lognormal distribution in capturing the non-Gaussianity of sea clutter [
29,
30]. Recently, some adaptive coherent detectors have been designed to detect radar targets in lognorm-texture CG clutter backgrounds [
20,
31]. However, it is notable that existing detectors focus on a single polarimetric channel data modeling, and do not jointly exploit multi-polarimetric data. Because clutter and targets behave differently in different polarization modes, it is possible to enhance clutter suppression and target identification performance by making efficient use of polarization information. However, adaptive polarimetric detection for radar targets in lognorm-texture CG clutter has not been dealt with. It is therefore necessary to design polarimetric detectors for radar targets in pulse-correlated lognorm-texture CG clutter. Firstly, the mathematical models of polarimetric radar targets and sea clutter are presented. The presence of unknown parameters makes it impossible to design an adaptive target detector that is optimal for all parameters, so sub-optimal tests [
32,
33,
34,
35,
36,
37] are often used to design target detectors. In the design stage of radar target detectors, the most commonly used test criterion is the GLRT, but it has no optimality. The Rao and Wald tests, also used as design criteria, have lower computational complexity than GLRT, and may design detectors with stronger robustness than the GLRT. Therefore, the two-step GLRT and the two-step complex parameter versions of Rao and Wald tests are utilized to derive adaptive polarimetric coherent detectors that merge polarimetric and texture distribution information. Finally, the performance are evaluated by numerical experiments on the basis of simulated data and real intelligent pixel processing radar (IPIX) data.
This paper is organized as follows.
Section 2 introduces and describes the problem and data model.
Section 3 details the derivation of three adaptive coherent polarimetric detectors.
Section 4 reports the performance evaluation.
Section 5 concludes the paper.
2. Polarimetric Detection Problem Description
Considering that a polarimetric radar transmits and receives horizontal and linear orthogonal polarizations (HH, HV, VH and VV). The radar echo data vector at a single polarimetric channel contains a coherent train of
N pulses, i.e.,
,
(
), 2 (
), 3 (
), or 4 (
), where
denotes transpose, and the comma separator in a row vector or matrix represents concatenating elements along a column dimension. A
-dimensional echo vector is constructed by stacking radar data from
p polarimetric channels, i.e.,
. We also suppose that the secondary data from the
L range cells can be exploited to estimate the clutter covariance matrix structure. The problem of target detection in clutter-dominated environments can be addressed with the binary hypothesis test that follows:
where the alternative hypothesis
has the target signal, but the null hypothesis
does not include the target signal. The
-dimensional vector
is
, denoting sea clutter in the primary data.
. The
-dimensional vector
is
, denoting the target signal from two polarimetric channels. The
-dimensional vector
is
, denoting the secondary data at the
k-th range cell. And the
-dimensional vector
is
, denoting the clutter data at the
k-th range cell.
We adopt the rank-one model to describe the target signal at the -th polarimetric channel, which is . The unknown target amplitude at the -th polarimetric channel is represented by the scalar , and its Doppler steering vector is represented by the N-dimensional vector . Thus, the target vector can be expressed as , where , , ⊗ denotes the Kronecker product, and denotes an identity matrix of order m.
We assume that the clutter vectors at various range cells are independently and identically distributed. The
N-dimensional clutter vector
at the
-th polarimetric channel in a radar CPI is modeled as an SIRV, which is represented by
where
denotes clutter textures at the
-th polarimetric channel, and
denotes clutter speckle at the
-th polarimetric channel. The speckle component at each polarimetric channel obeys the
N-dimensional complex circular Gaussian distribution. When the clutter textures at all the polarimetric channels are given, the covariance matrix of clutter data
can be given as
, where
denotes the statistical expectation,
, and
represents a square diagonal matrix with entries of vector
on the major diagonal. The correlation of clutter speckle components in different polarimetric channels is reflected in the speckle covariance matrix
. In this paper, we consider that the texture at the
-th polarimetric channel obeys the lognormal distribution:
where
denotes the shape parameter at the
-th polarimetric channel, and
denotes the scale parameter at the
-th polarimetric channel. The shape parameter
and the scale parameter
at the
-th polarimetric channel are usually considered to be shared within a specific region, and can be estimated by the clutter parameter estimators [
29,
30] and radar echo data in this region. Because the correlation of texture components can lead to mathematical unachievability, we assume that the texture components are independent from each other in order to obtain closed-form solutions for the detector design.
The conditional PDF of primary data
under
and
hypotheses can be obtained as
and
respectively, where
denotes the matrix determinant. From (
4) and (
5), we can see that it is very difficult to decouple the clutter textures
and
. Therefore, in order to facilitate the estimation of texture components, (
4) and (
5) are rewritten as
and
respectively, where
, the semicolon separator in a column vector or matrix represents concatenating elements along a row dimension,
, and
. In the transform procedure, we adopt
, and
.
4. Experiment Results and Analysis
Three proposed adaptive polarimetric detectors are reported via Monte Carlo simulations in this section. Several traditional detectors are used for comparison, including ANMF [
12], GLRT-LND (GLRT with lognormal texture detector) [
20], RAO-LND (Rao with lognormal texture detector) [
31], and WALD-LND (Wald with lognormal texture detector) [
31].
The target signals at two polarimetric channels are assumed to follow the complex Gaussian distribution, and their joint vector
is modeled as
, where
denotes the radar target signal power mean, and the 2-dimensional complex Gaussian vector
has zero-mean and the following covariance matrix:
where
denotes the correlation coefficient between
and
;
denotes the target average power ratio, i.e.,
;
denotes the target average power at the HH polarimetric channel; and
denotes the target average power at the HV polarimetric channel. At a single polarimetric channel, the target steering vector is
. The signal-to-clutter ratio (SCR) at the HH or HV polarimetric channel is given by
or
.
The sea clutter vector
is simulated as an SIRV in (
2). First, the clutter textures
and
are generated as the lognormal random variables. Then, the
-dimensional speckle vector
is generated as a zero-mean complex Gaussian vector with the following covariance matrix:
where
denotes the correlation coefficient between the clutter speckle component at HH and HV polarimetric channels, and
denotes the speckle covariance matrix, i.e.,
,
.
Figure 1 illustrates the probability of detection (PD) curves for different numbers of range cells of secondary data. The experimental parameters are set as
,
,
,
,
,
,
,
,
, and
. As demonstrated in
Figure 1a,b, an increase in
L corresponds to an increase in the PDs for all detectors, with the three proposed detectors outperforming their counterparts. Due to the pulse number of the proposed detectors being
, they suffer significant performance degradation when secondary data are limited (
). Additionally, the performance gap among the three proposed detectors narrows as
L increases. The incorporation of clutter texture and radar polarimetric information provides a performance edge to the proposed detectors. As
L increases, the reduction in performance loss due to the speckle covariance matrix estimation becomes more pronounced for the three proposed detectors.
Figure 2 shows the PD curves for different shape parameter values. The experimental setup includes
,
,
,
,
,
, known
,
,
, and
. As indicated in
Figure 2a,b, as
increases, the performance disparity among the three proposed detectors diminishes, with these detectors consistently achieving higher PD than others. A low shape parameter value suggests the sea clutter is spiky with significant non-Gaussian characteristics. Conversely, a higher shape parameter value transitions the non-Gaussian sea clutter towards Gaussian behavior. Given the simulation conditions, PolWALD-GLRT excels in highly non-Gaussian sea clutter, while all three proposed detectors exhibit similar performance in near-Gaussian conditions. The use of clutter texture distribution enables the proposed adaptive detectors to adjust effectively to variations in sea clutter non-Gaussianity.
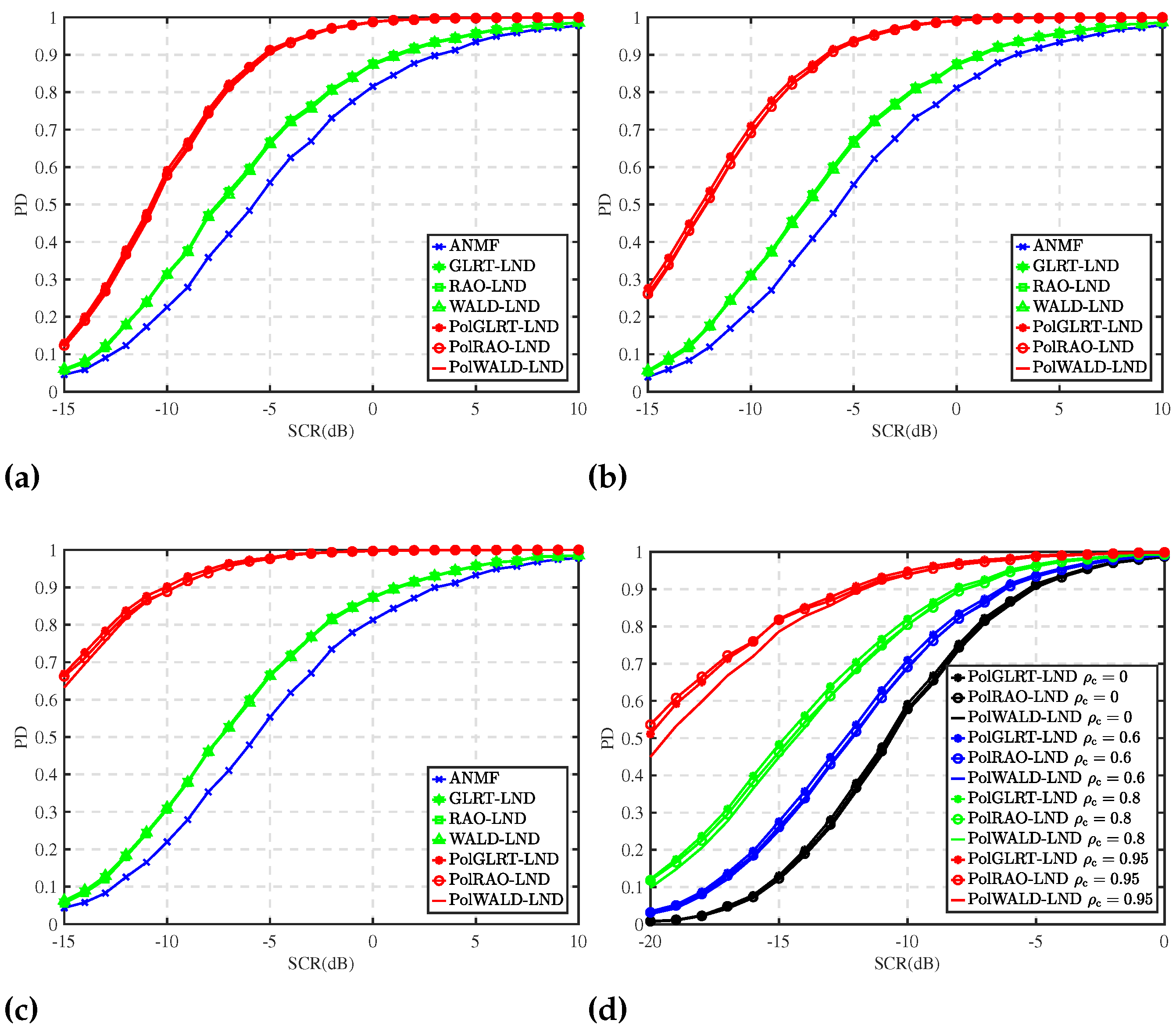
Figure 3 analyzes the impact of values of
on PD curves of all the detectors. The experimental setup includes
,
,
,
, known
,
,
,
, and
.
Figure 3a–c display the PD curves when
is set to 0, 0.6, and 0.95, respectively. As shown in these figures, the three proposed detectors exhibit similar performance and outperform the other detectors under the given simulation conditions.
Figure 3d illustrates the PD curves for the three proposed detectors with
values of 0, 0.6, 0.8, and 0.95. As seen in
Figure 3d, both of the proposed detectors’ detection performance decreases when
increases. This decline is due to the decreasing probability that the test statistics will surpass their respective detection thresholds as the correlation coefficient
rises.
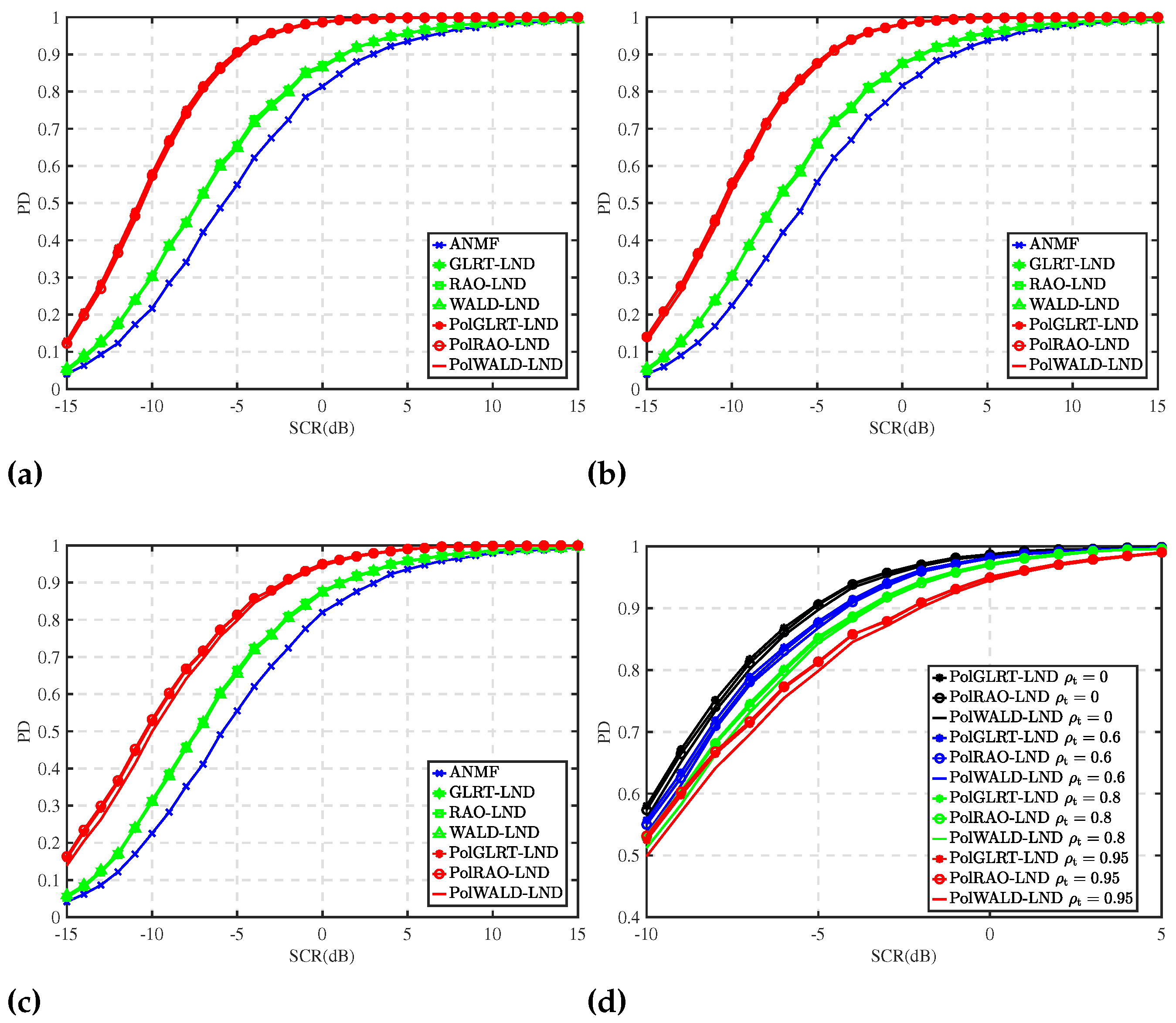
The impact of
values on PD curves for detectors is examined in
Figure 4. The experimental parameters are set to
,
,
,
, with
known,
,
,
, and
.
Figure 4a–c illustrate the PD curves against SCR for all detectors at
, respectively. It is seen from
Figure 4a–c that three proposed detectors outperform the competitors under the given simulation parameters, and that the performance gap widens with the increase in
.
Figure 4d presents the PD curves of the three proposed detectors for
. Three proposed detectors exhibit improved detection performance with greater
, as demonstrated in
Figure 4d. This improvement is attributed to the whitening of correlated sea clutter.
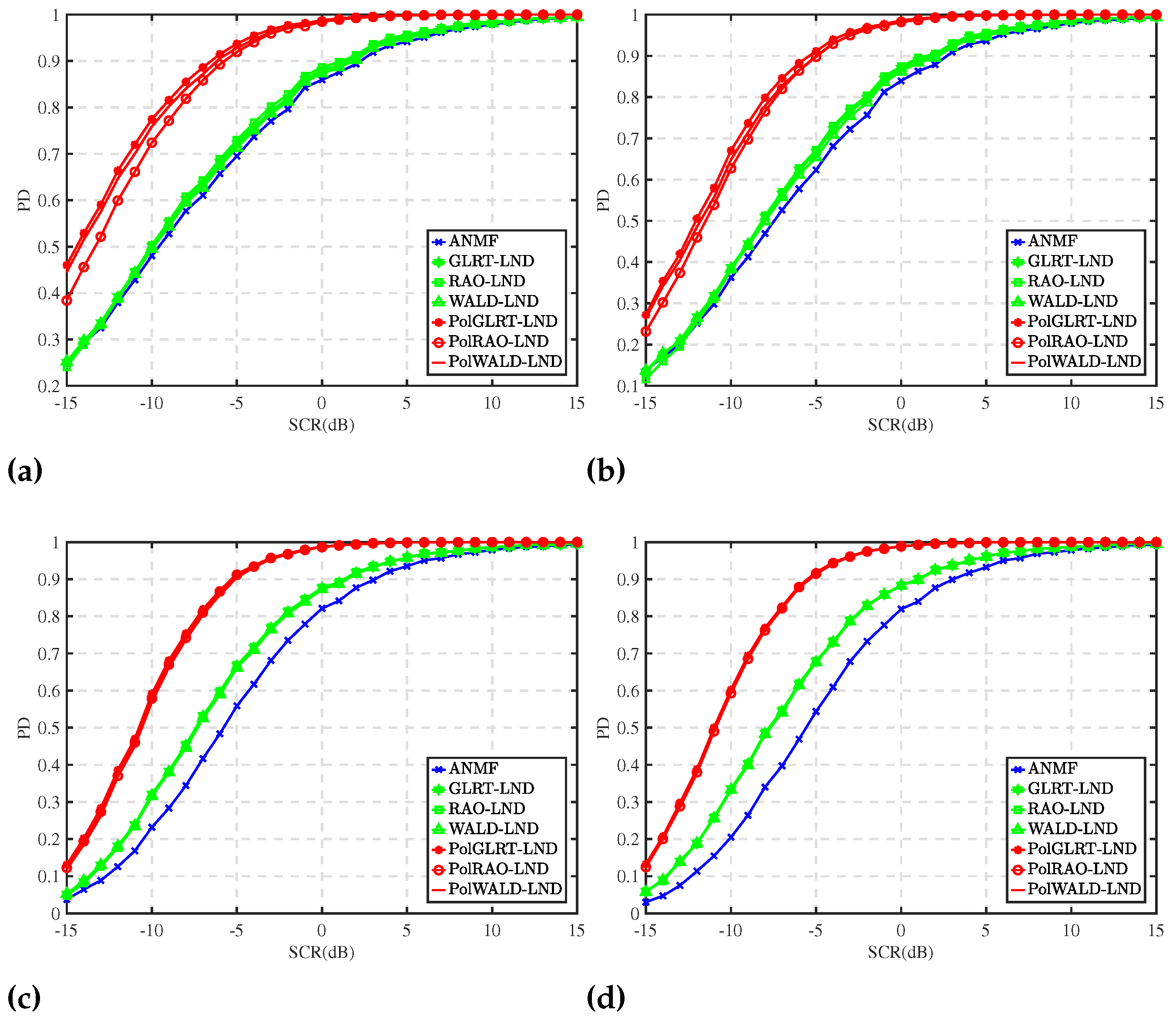
Figure 5 presents the PD curves for all detectors at various target average power ratios
and clutter average power ratios
between HV and HH polarimetric channels. The experimental parameters are set as
, with
,
,
,
,
,
known,
,
, and
. When
, the performance is evaluated using the SCR of the HV polarimetric channel; otherwise, the SCR of the HH polarimetric channel is used.
Figure 5a–d demonstrate that the three proposed detectors outperform others under the given simulation parameters. This improved performance stems from the ability of the proposed detectors to leverage the polarimetric information from the channel with the smaller SCR, even when the performance evaluation is based on the maximum SCR between the HV and HH channels. Consequently, the enhancement in detector performance is directly related to the lower SCR.
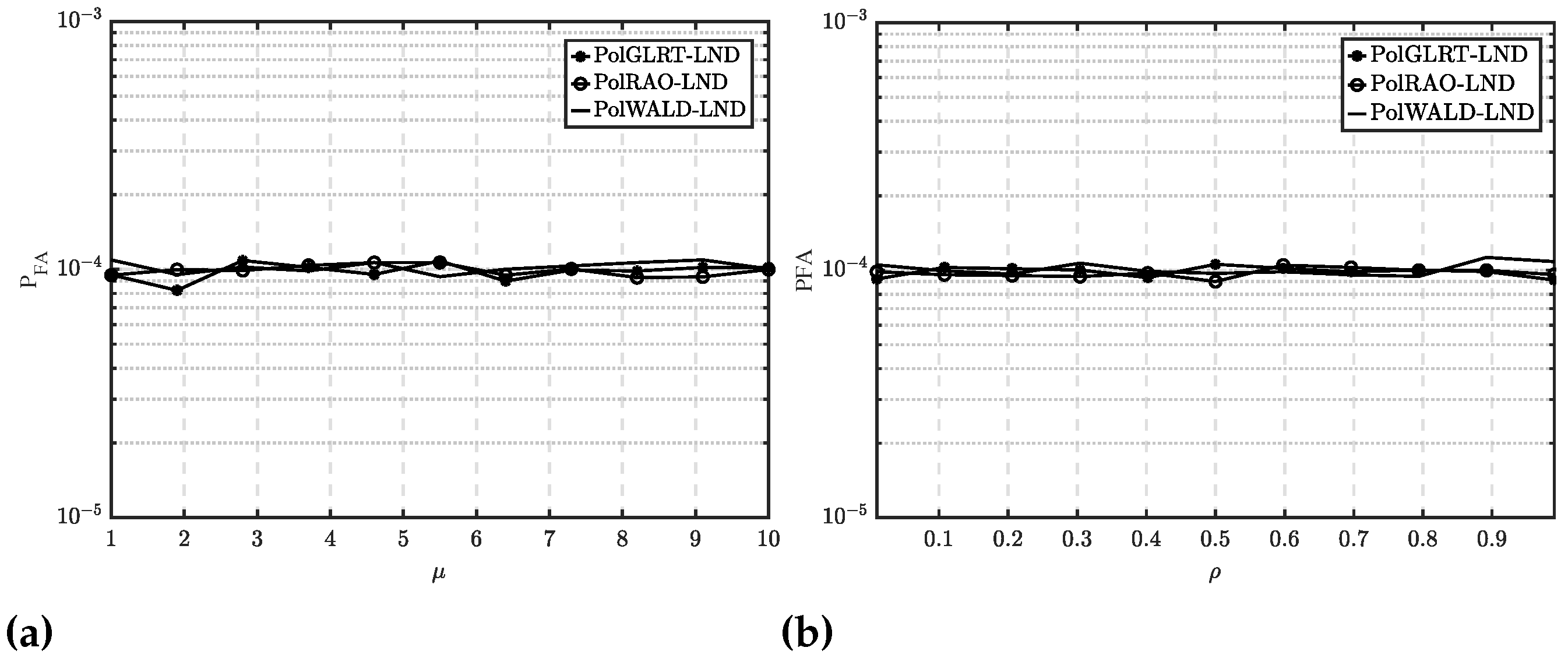
Figure 6 illustrates the
curves for three proposed detectors with regard to
and
. The experimental settings are
,
,
,
,
,
,
,
,
, and
. In
Figure 6a, the
is plotted against
for
values ranging from 1 to 10 with
. It shows that
remains nearly unchanged as
varies.
Figure 6b depicts
versus
for
values between 0.01 and 0.99 with
set to 1. It reveals that variations in
have minimal impact on
. Therefore, the simulations in
Figure 6 confirm that three proposed detectors demonstrate an approximate CFAR property with respect to
and
.
Figure 7 shows the clutter power map, amplitude fitting results, and the PD curves for all detectors. The 1998 IPIX dataset [
39] was used to assess performance. The IPIX radar operates in dual linear polarization mode at a carrier frequency of 9.39 GHz, and the range resolution is 30 m. For the dataset 19980204_163113_ANTSTEP, the clutter texture parameters (
,
,
, and
) were estimated using methods from [
29,
30] and integrated into the detectors. Experimental parameters were set as
,
,
,
,
,
, and
. Simulated target signals were used to statistically calculate PD versus SCR.
Figure 7a displays the clutter power map at HH and HV channels, revealing significant power fluctuations.
Figure 7b–c present the fitting results for HH and HV polarization data, where the lognorm-texture CG distribution accurately models both the main and tail parts.
Figure 7d indicates that the proposed PolGLRT-LND performs best, followed by PolWALD-LND. The performance advantage of PolRAO-LND is minimal. Due to the limited number of range cells (up to 26) in the measured radar data, accurately estimating the clutter speckle covariance matrix is challenging. A similar issue is evident in
Figure 1a, implying that the proposed PolGLRT-LND and PolWALD-LND are more robust to clutter speckle covariance matrix estimation errors compared to PolRAO-LND.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}