
A Semi-Automatic Approach for Tree Crown Competition Indices Assessment from UAV LiDAR

 ,
,  ,
,  , and
, and
Abstract
1. Introduction
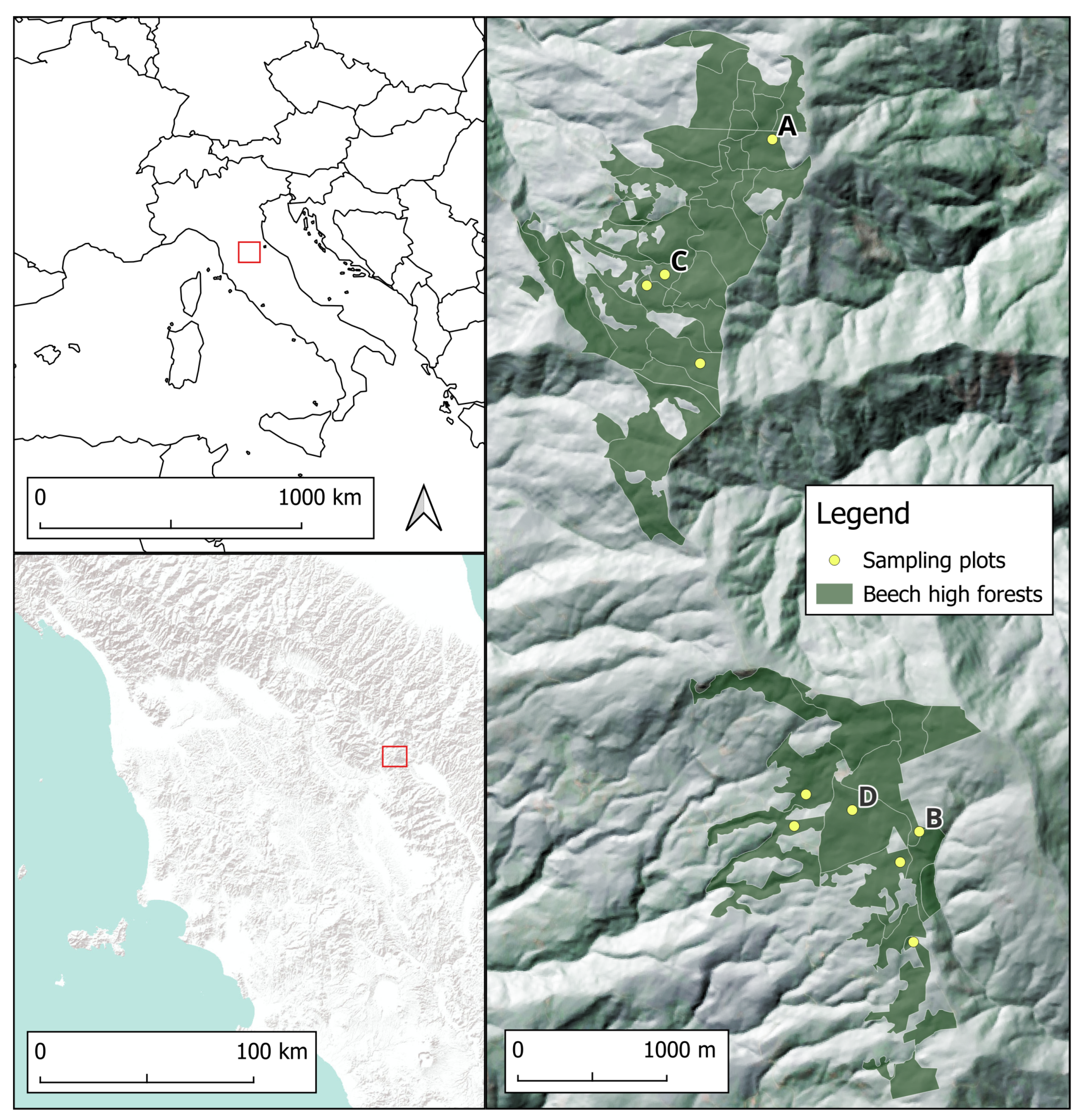
2. Materials
3. Methods
3.1. Crown Features
3.2. Differentiation Dimensional Indices
3.3. Statistical Analysis
4. Results
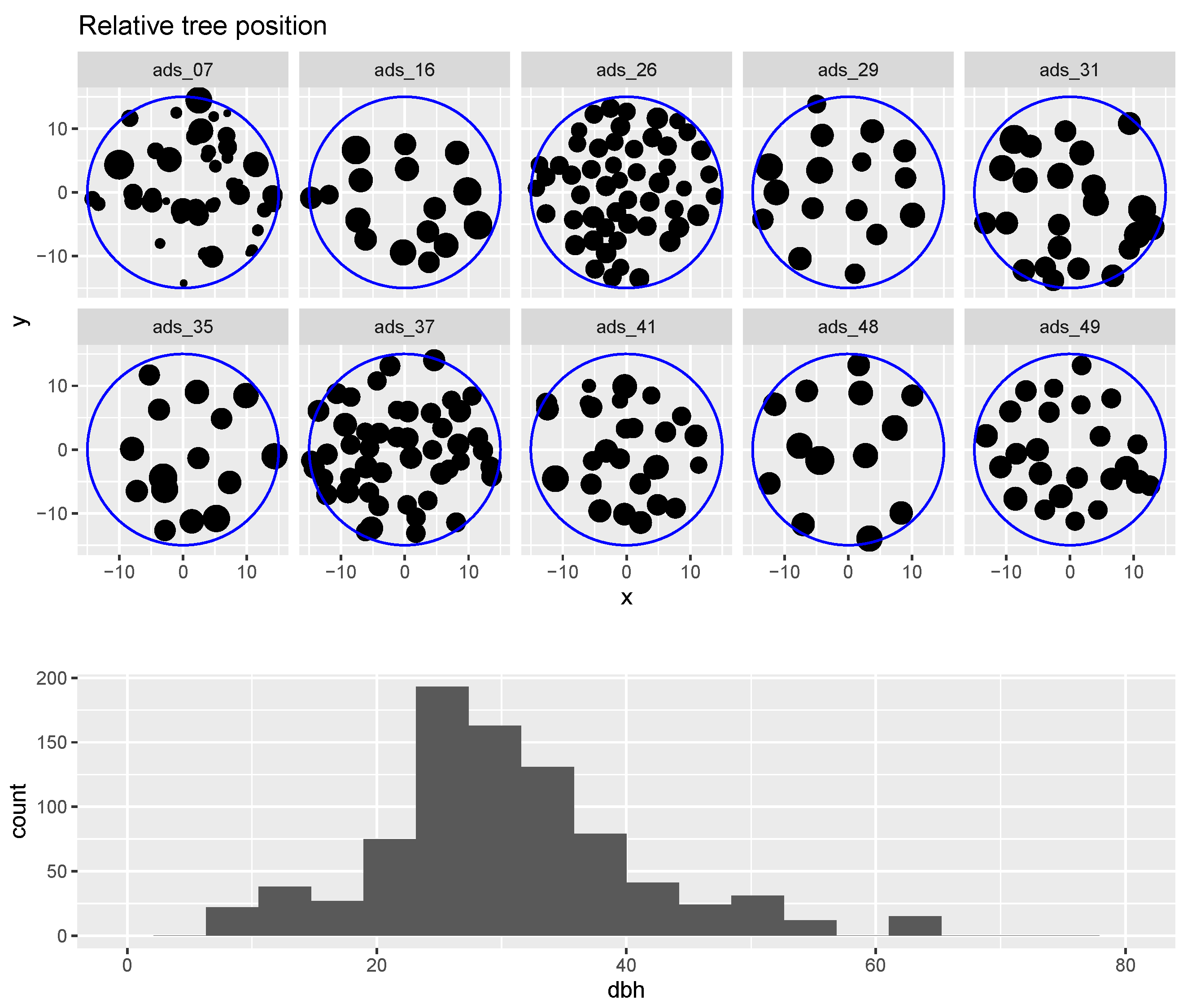
4.1. Single Tree Manual Segmentation
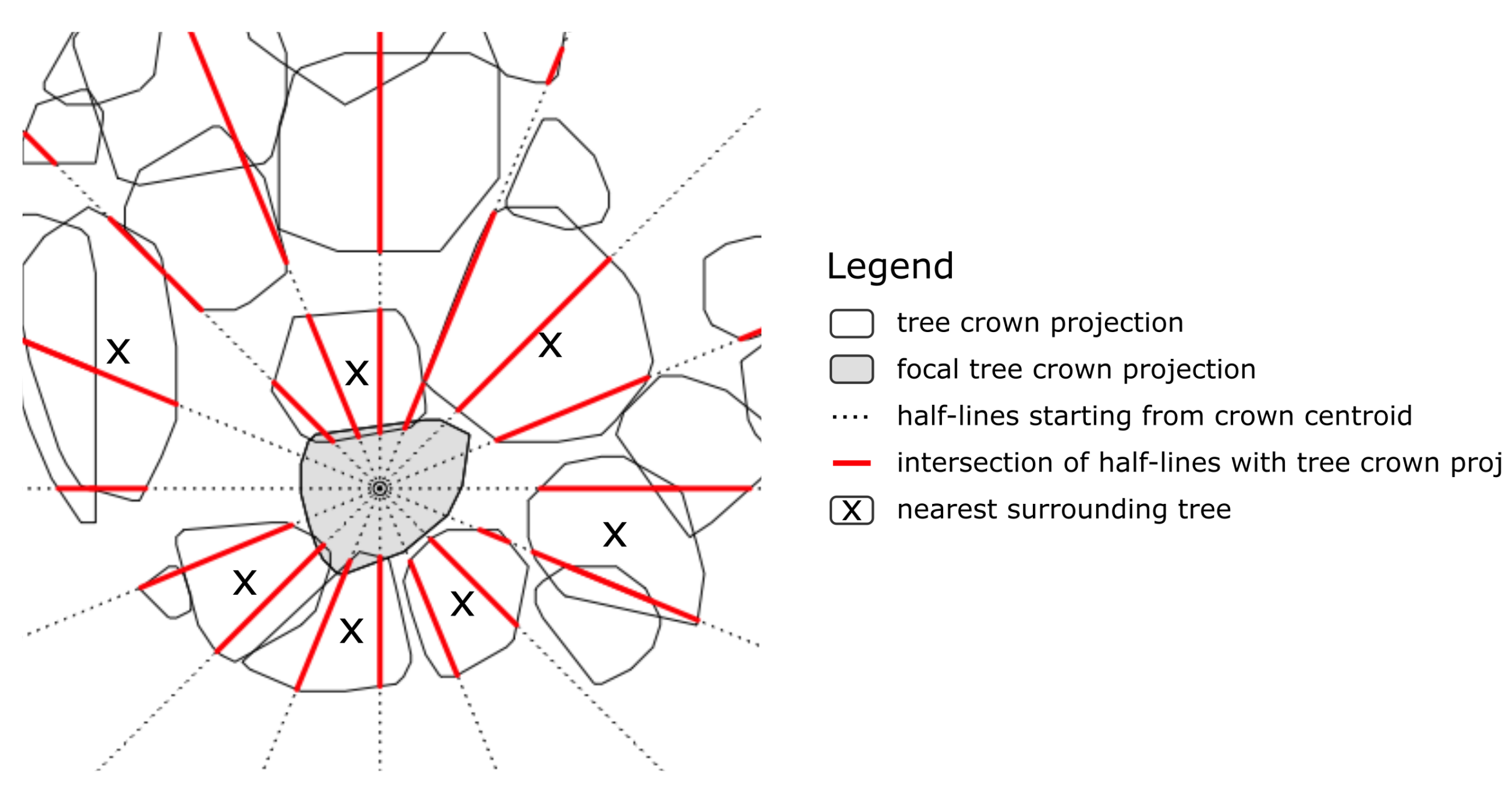
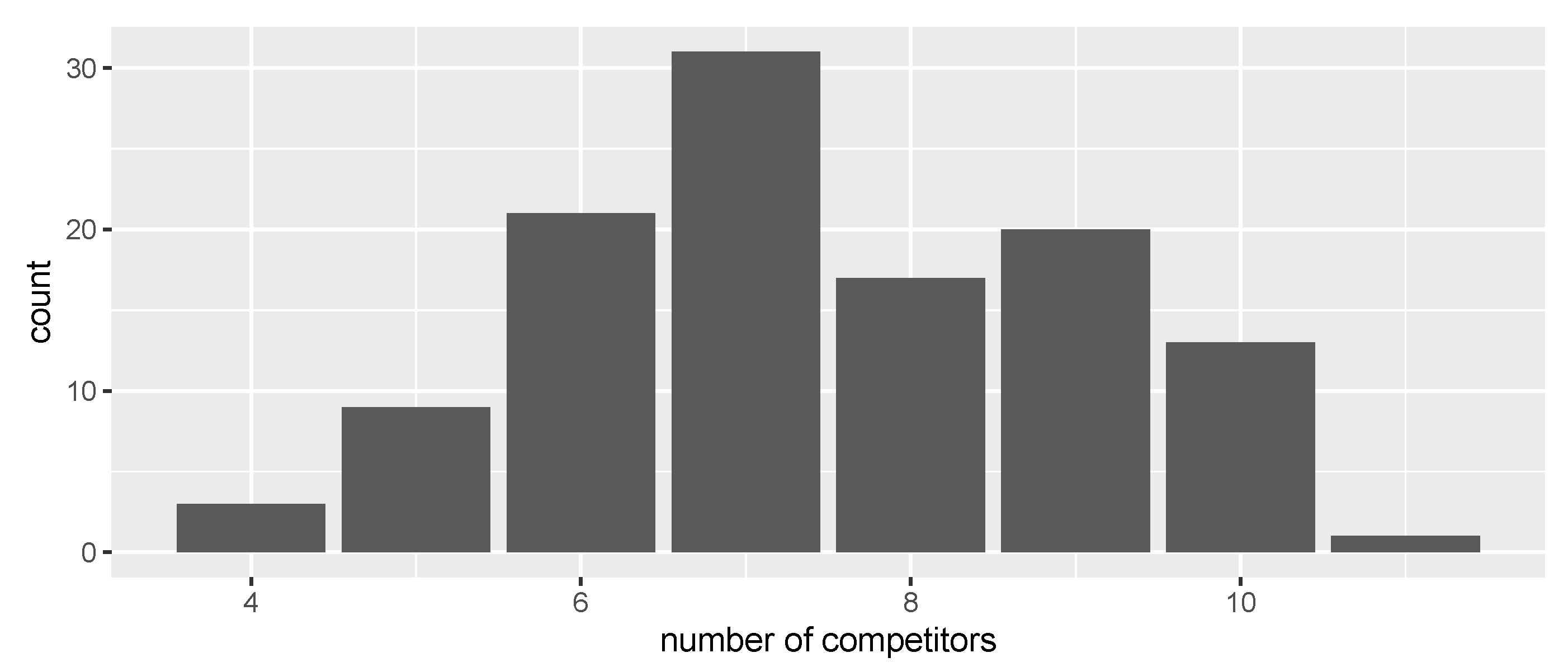
4.2. Tree-Neighbors Selection
4.3. Crown Projected Area and Crown Volume
4.4. Indices Statistic Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dial, R.; Bloodworth, B.; Lee, A.; Boyne, P.; Heys, J. The Distribution of Free Space and Its Relation to Canopy Composition at Six Forest Sites. For. Sci. 2004, 50, 312–325. [Google Scholar] [CrossRef]
- Hildebrand, M.; Perles-Garcia, M.D.; Kunz, M.; Härdtle, W.; Von Oheimb, G.; Fichtner, A. Tree-tree interactions and crown complementarity: The role of functional diversity and branch traits for canopy packing. Basic Appl. Ecol. 2021, 50, 217–227. [Google Scholar] [CrossRef]
- Verkerk, P.J.; Fitzgerald, J.B.; Datta, P.; Dees, M.; Hengeveld, G.M.; Lindner, M.; Zudin, S. Spatial distribution of the potential forest biomass availability in Europe. For. Ecosyst. 2019, 6, 5. [Google Scholar] [CrossRef]
- Aalto, I.; Aalto, J.; Hancock, S.; Valkonen, S.; Maeda, E.E. Quantifying the impact of management on the three-dimensional structure of boreal forests. For. Ecol. Manag. 2023, 535, 120885. [Google Scholar] [CrossRef]
- Pretzsch, H.; Dieler, J. Evidence of variant intra- and interspecific scaling of tree crown structure and relevance for allometric theory. Oecologia 2012, 169, 637–649. [Google Scholar] [CrossRef]
- Pretzsch, H. The Effect of Tree Crown Allometry on Community Dynamics in Mixed-Species Stands versus Monocultures. A Review and Perspectives for Modeling and Silvicultural Regulation. Forests 2019, 10, 810. [Google Scholar] [CrossRef]
- Seidel, D.; Leuschner, C.; Müller, A.; Krause, B. Crown plasticity in mixed forests—Quantifying asymmetry as a measure of competition using terrestrial laser scanning. For. Ecol. Manag. 2011, 261, 2123–2132. [Google Scholar] [CrossRef]
- Hui, G.; Gadow, K. Das Winkelmass—Herleitung des optimalen Standardwinkels. Allg. Forst Jagdztg. 2002, 173, 173–176. [Google Scholar]
- Pommerening, A. Evaluating structural indices by reversing forest structural analysis. For. Ecol. Manag. 2006, 224, 266–277. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, J.; Kang, X. Spatial distribution pattern of dominant tree species in different disturbance plots in the Changbai Mountain. Sci. Rep. 2022, 12, 14161. [Google Scholar] [CrossRef]
- Pommerening, A.; Wang, H.; Zhao, Z. Global woodland structure from local interactions: New nearest-neighbour functions for understanding the ontogenesis of global forest structure. For. Ecosyst. 2020, 7, 22. [Google Scholar] [CrossRef]
- Disney, M. Terrestrial LiDAR: A three-dimensional revolution in how we look at trees. New Phytol. 2019, 222, 1736–1741. [Google Scholar] [CrossRef] [PubMed]
- Torresan, C.; Berton, A.; Carotenuto, F.; Chiavetta, U.; Miglietta, F.; Zaldei, A.; Gioli, B. Development and Performance Assessment of a Low-Cost UAV Laser Scanner System (LasUAV). Remote Sens. 2018, 10, 1094. [Google Scholar] [CrossRef]
- Puletti, N.; Innocenti, S.; Guasti, M. A co-registration approach between terrestrial and UAV laser scanning point clouds based on ground and trees features. Ann. Silvic. Res. 2024, 49, 4466. [Google Scholar] [CrossRef]
- Torresan, C.; Pelleri, F.; Manetti, M.; Becagli, C.; Castaldi, C.; Notarangelo, M.; Chiavetta, U. Comparison of TLS against traditional surveying method for stem taper modelling. A case study in European beech (Fagus sylvatica L.) forests of mount Amiata. Ann. Silvic. Res. 2021, 46, 128–140. [Google Scholar]
- Szmyt, J.; Korzeniewicz, R. Do natural processes at the juvenile stage of stand development differentiate the spatial structure of trees in artificially established forest stands? For. Res. Pap. 2014, 75, 171–179. [Google Scholar] [CrossRef]
- Owen, H.J.F.; Flynn, W.R.M.; Lines, E.R. Competitive drivers of interspecific deviations of crown morphology from theoretical predictions measured with Terrestrial Laser Scanning. J. Ecol. 2021, 109, 2612–2628. [Google Scholar] [CrossRef]
- Cutini, A.; Chianucci, F.; Giannini, T.; Manetti, M.C.; Salvati, L. Is anticipated seed cutting an effective option to accelerate transition to high forest in European beech (Fagus sylvatica L.) coppice stands? Ann. For. Sci. 2015, 72, 631–640. [Google Scholar] [CrossRef]
- Fattorini, L.; Puletti, N.; Chirici, G.; Corona, P.; Gazzarri, C.; Mura, M.; Marchetti, M. Checking the performance of point and plot sampling on aerial photoimagery of a large-scale population of trees outside forests. Can. J. For. Res. 2016, 46, 1264–1274. [Google Scholar] [CrossRef]
- Puletti, N.; Grotti, M.; Ferrara, C.; Chianucci, F. Lidar-based estimates of aboveground biomass through ground, aerial, and satellite observation: A case study in a Mediterranean forest. J. Appl. Remote. Sens. 2020, 14, 044501. [Google Scholar] [CrossRef]
- Diara, F.; Roggero, M. Quality Assessment of DJI Zenmuse L1 and P1 LiDAR and Photogrammetric Systems: Metric and Statistics Analysis with the Integration of Trimble SX10 Data. Geomatics 2022, 2, 254–281. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Línková, L. A New Method for UAV Lidar Precision Testing Used for the Evaluation of an Affordable DJI ZENMUSE L1 Scanner. Remote. Sens. 2021, 13, 4811. [Google Scholar] [CrossRef]
- Roussel, J.R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.; Meador, A.; Bourdon, J.; De Boissieu, F.; Achim, A. lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote. Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Keren, S.; Svoboda, M.; Janda, P.; Nagel, T.A. Relationships between Structural Indices and Conventional Stand Attributes in an Old-Growth Forest in Southeast Europe. Forests 2019, 11, 4. [Google Scholar] [CrossRef]
- Team, R.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2023. [Google Scholar]
- Juchheim, J.; Ammer, C.; Schall, P.; Seidel, D. Canopy space filling rather than conventional measures of structural diversity explains productivity of beech stands. For. Ecol. Manag. 2017, 395, 19–26. [Google Scholar] [CrossRef]
- Keren, S.; Diaci, J.; Motta, R.; Govedar, Z. Stand structural complexity of mixed old-growth and adjacent selection forests in the Dinaric Mountains of Bosnia and Herzegovina. For. Ecol. Manag. 2017, 400, 531–541. [Google Scholar] [CrossRef]
- Parobeková, Z.; Pittner, J.; Kucbel, S.; Saniga, M.; Filípek, M.; Sedmáková, D.; Vencurik, J.; Jaloviar, P. Structural Diversity in a Mixed Spruce-Fir-Beech Old-Growth Forest Remnant of the Western Carpathians. Forests 2017, 2018, 379. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ads id | N ha−1 | DBH | TH | vol |
|---|---|---|---|---|
| ads_07 | 679.1 | 21.6 (13.4) | 23.9 (3.8) | 0.7 (0.9) |
| ads_16 | 226.4 | 44 (10.9) | 23.1 (1.4) | 1.7 (1) |
| ads_26 | 735.6 | 25.4 (3.8) | 15.4 (1.9) | 0.3 (0.1) |
| ads_29 | 226.4 | 38.4 (9.3) | 21.5 (1.8) | 1.5 (0.8) |
| ads_31 | 325.4 | 42.8 (9.3) | 21.8 (1.6) | 1 (0.5) |
| ads_34 | 127.3 | 48.9 (21.5) | 23.1 (1.3) | 1.9 (1.5) |
| ads_35 | 212.2 | 43.3 (9.7) | 25.1 (1.4) | 1.4 (0.6) |
| ads_37 | 679.1 | 30.2 (4.2) | 22.4 (1.7) | 0.7 (0.2) |
| ads_41 | 382.0 | 32.1 (8.7) | 21.1 (1.7) | 1 (0.8) |
| ads_48 | 183.9 | 44.3 (8.5) | 27.5 (1) | 2.3 (0.8) |
| ads_49 | 339.5 | 33.6 (5.7) | 25.3 (1.3) | 0.9 (0.3) |
| Total | 411.7 | 32.5 (12.2) | 21.8 (4) | 0.9 (0.8) |
| ads id | N ha−1 | CrPrj | CrVol |
|---|---|---|---|
| ads_07 | 679.1 | 10.3 (13.6) | 26.1 (34.2) |
| ads_16 | 226.4 | 27.9 (19.9) | 79.4 (55.1) |
| ads_26 | 735.6 | 7.8 (4.2) | 17.9 (8.2) |
| ads_29 | 226.4 | 28.8 (15.1) | 79.6 (47) |
| ads_31 | 325.4 | 21.9 (13.2) | 53.3 (31.3) |
| ads_34 | 127.3 | 33.9 (22) | 85.9 (49.6) |
| ads_35 | 212.2 | 25.4 (9.9) | 53.9 (29.6) |
| ads_37 | 679.1 | 8.2 (4.2) | 22.8 (10.1) |
| ads_41 | 382.0 | 15.3 (13) | 39.8 (33.9) |
| ads_48 | 183.9 | 27.9 (11.2) | 92.1 (37.7) |
| ads_49 | 339.5 | 15.6 (6.3) | 35 (13.6) |
| Total | 411.7 | 15.6 (13.8) | 40.4 (37.5) |
| 1 | ||||
| 7.60 × | 2.73 × | |||
| 3.89 × | 1.47 × | 0.19 | ||
| 1.39 × | 1.43 × | 1.69 × | 0.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Puletti, N.; Guasti, M.; Innocenti, S.; Cesaretti, L.; Chiavetta, U. A Semi-Automatic Approach for Tree Crown Competition Indices Assessment from UAV LiDAR. Remote Sens. 2024, 16, 2576. https://doi.org/10.3390/rs16142576
Puletti N, Guasti M, Innocenti S, Cesaretti L, Chiavetta U. A Semi-Automatic Approach for Tree Crown Competition Indices Assessment from UAV LiDAR. Remote Sensing. 2024; 16(14):2576. https://doi.org/10.3390/rs16142576
Chicago/Turabian StylePuletti, Nicola, Matteo Guasti, Simone Innocenti, Lorenzo Cesaretti, and Ugo Chiavetta. 2024. "A Semi-Automatic Approach for Tree Crown Competition Indices Assessment from UAV LiDAR" Remote Sensing 16, no. 14: 2576. https://doi.org/10.3390/rs16142576
APA StylePuletti, N., Guasti, M., Innocenti, S., Cesaretti, L., & Chiavetta, U. (2024). A Semi-Automatic Approach for Tree Crown Competition Indices Assessment from UAV LiDAR. Remote Sensing, 16(14), 2576. https://doi.org/10.3390/rs16142576