
Forest 3D Radar Reflectivity Reconstruction at X-Band Using a Lidar Derived Polarimetric Coherence Tomography Basis


Abstract
1. Introduction
2. Theoretical Background
2.1. Interferometric Measurements
2.2. Polarisation Coherence Tomography
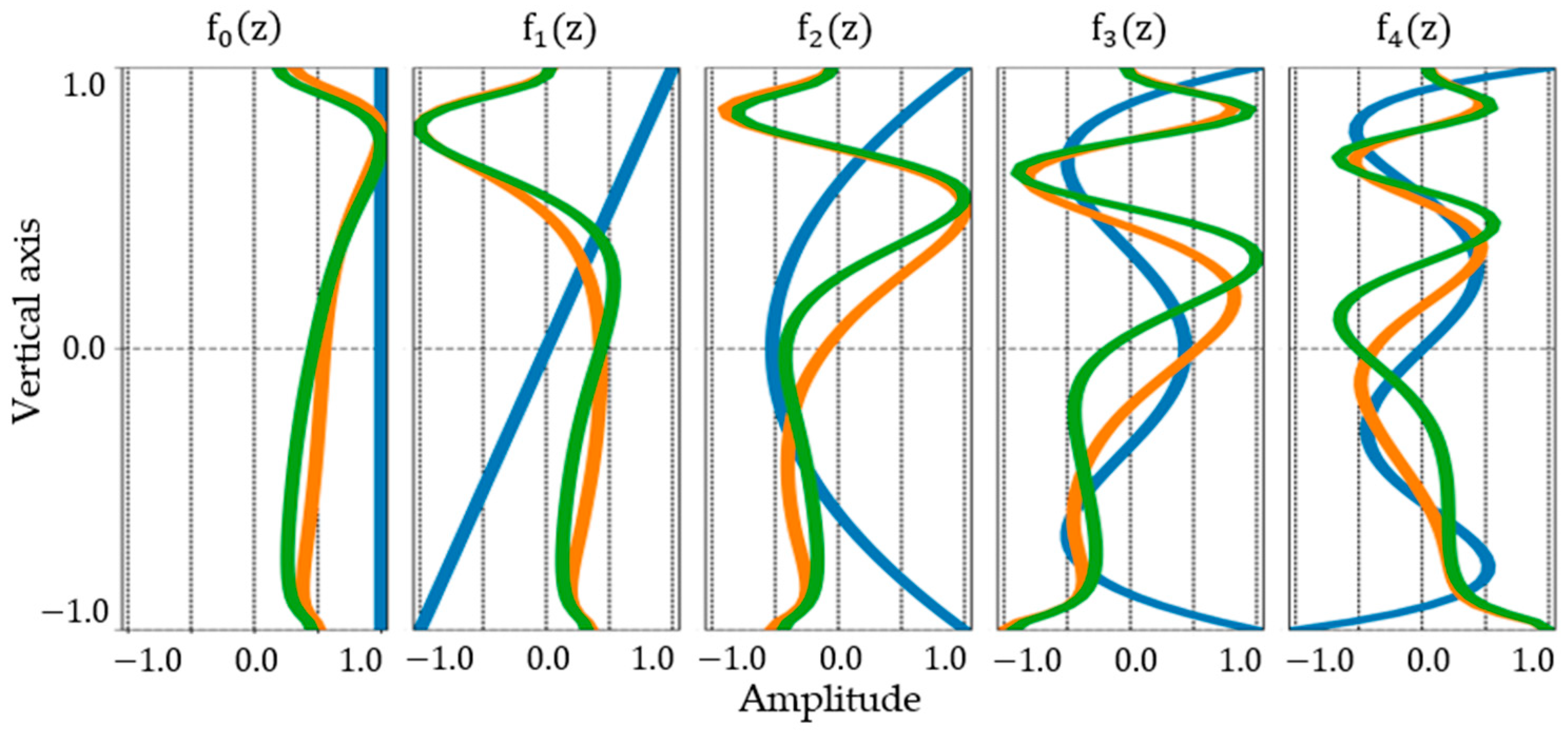
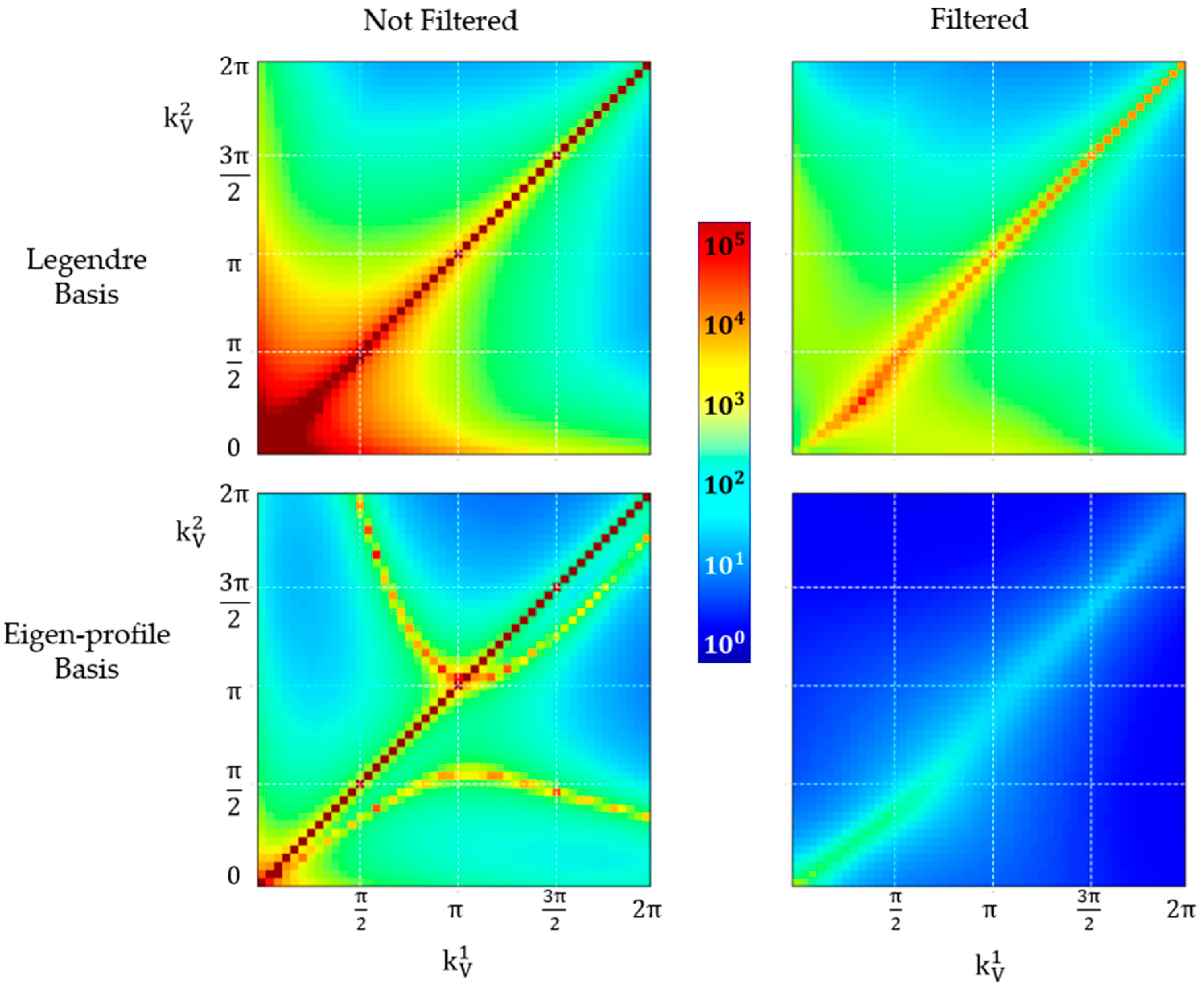
2.3. Basis Functions for PCT
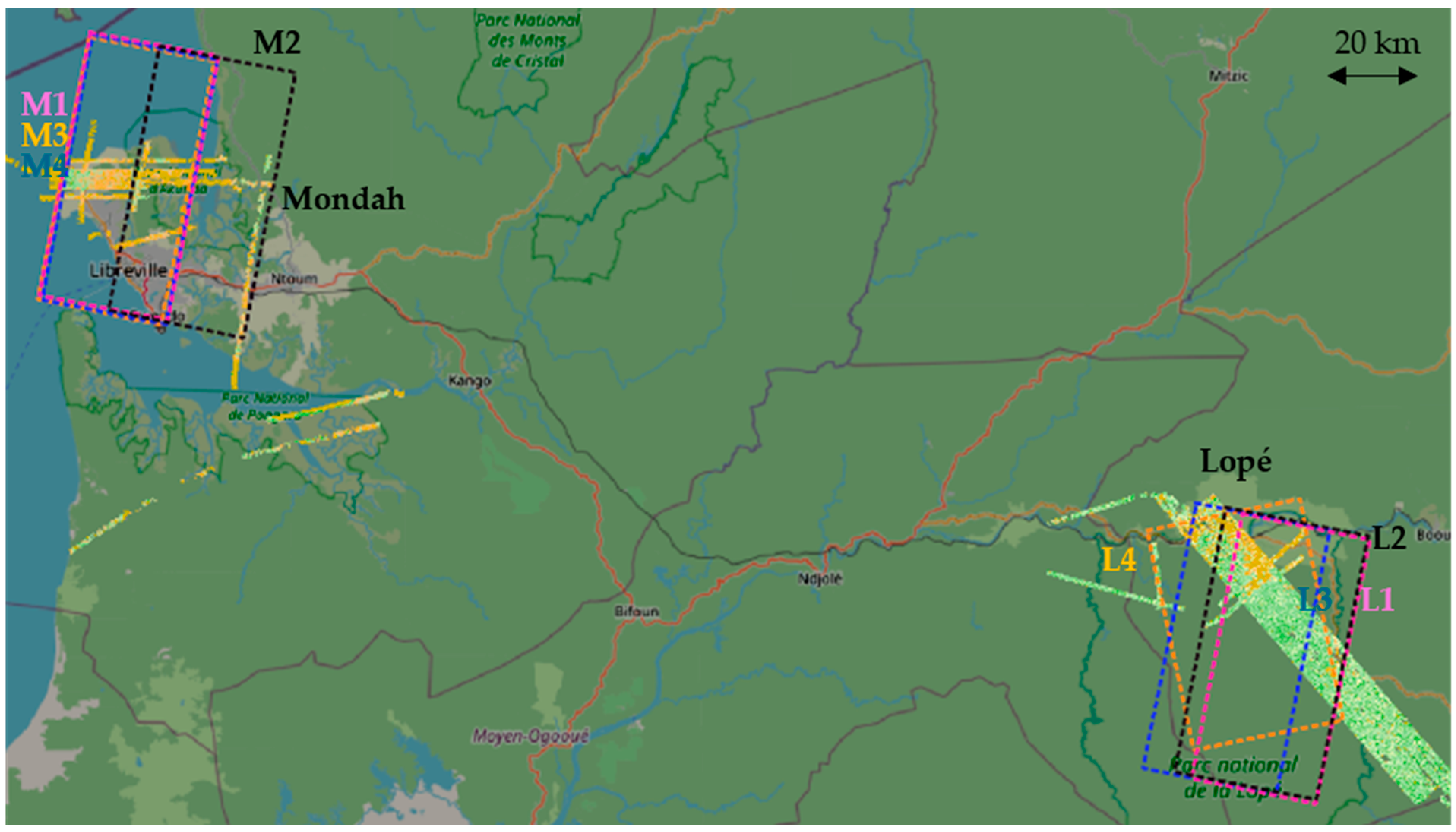
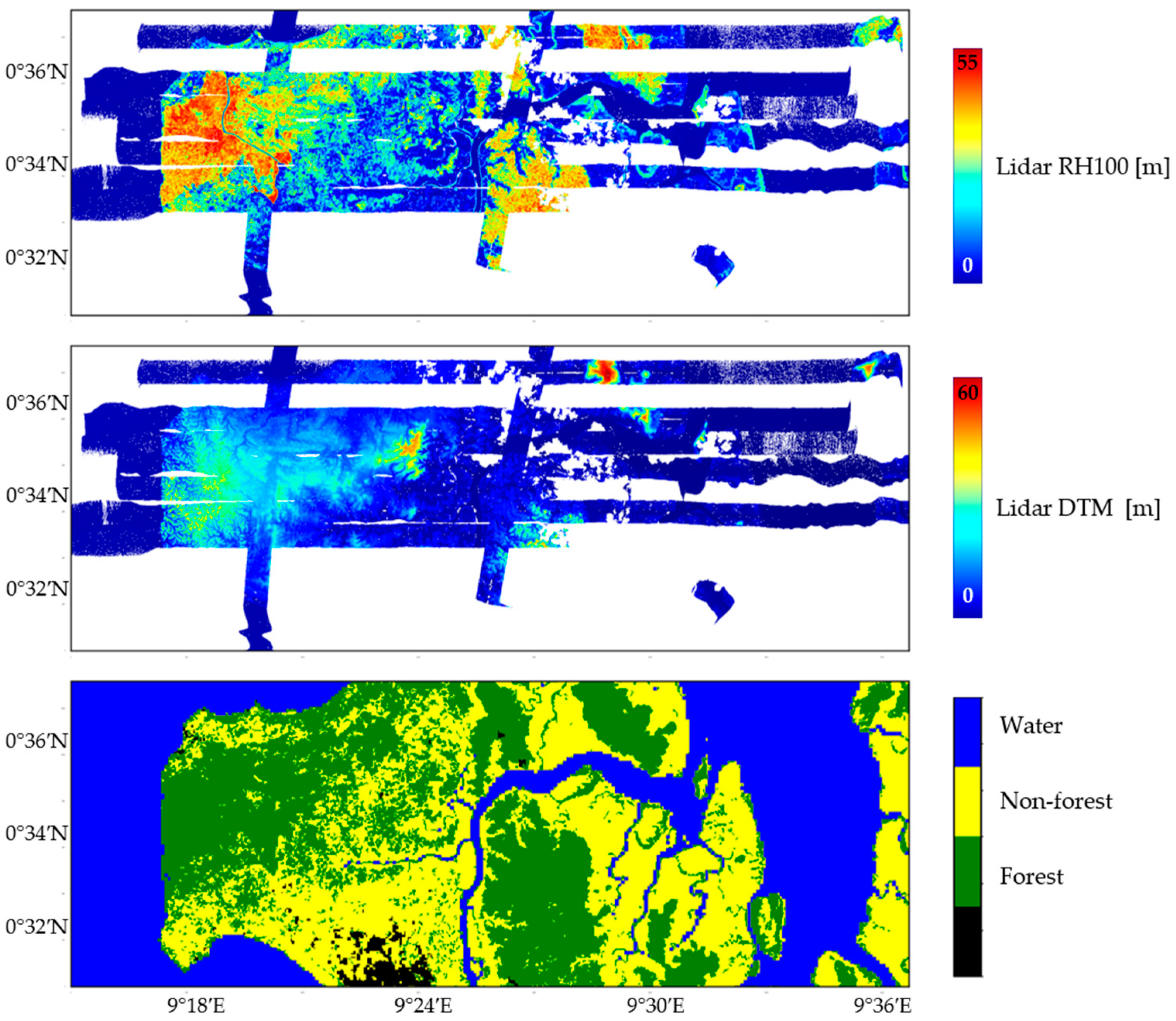
3. Experimental Data
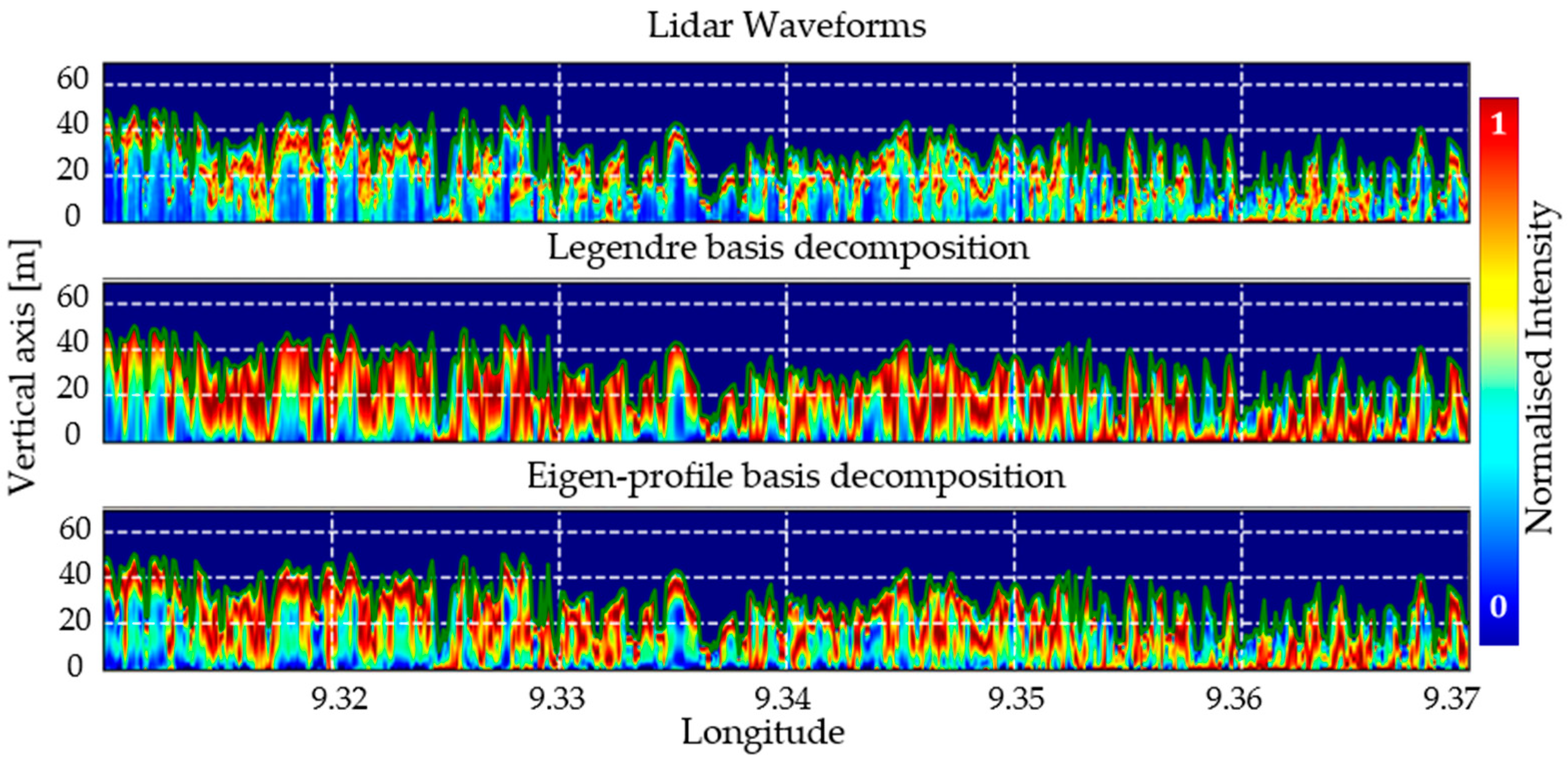
4. Results
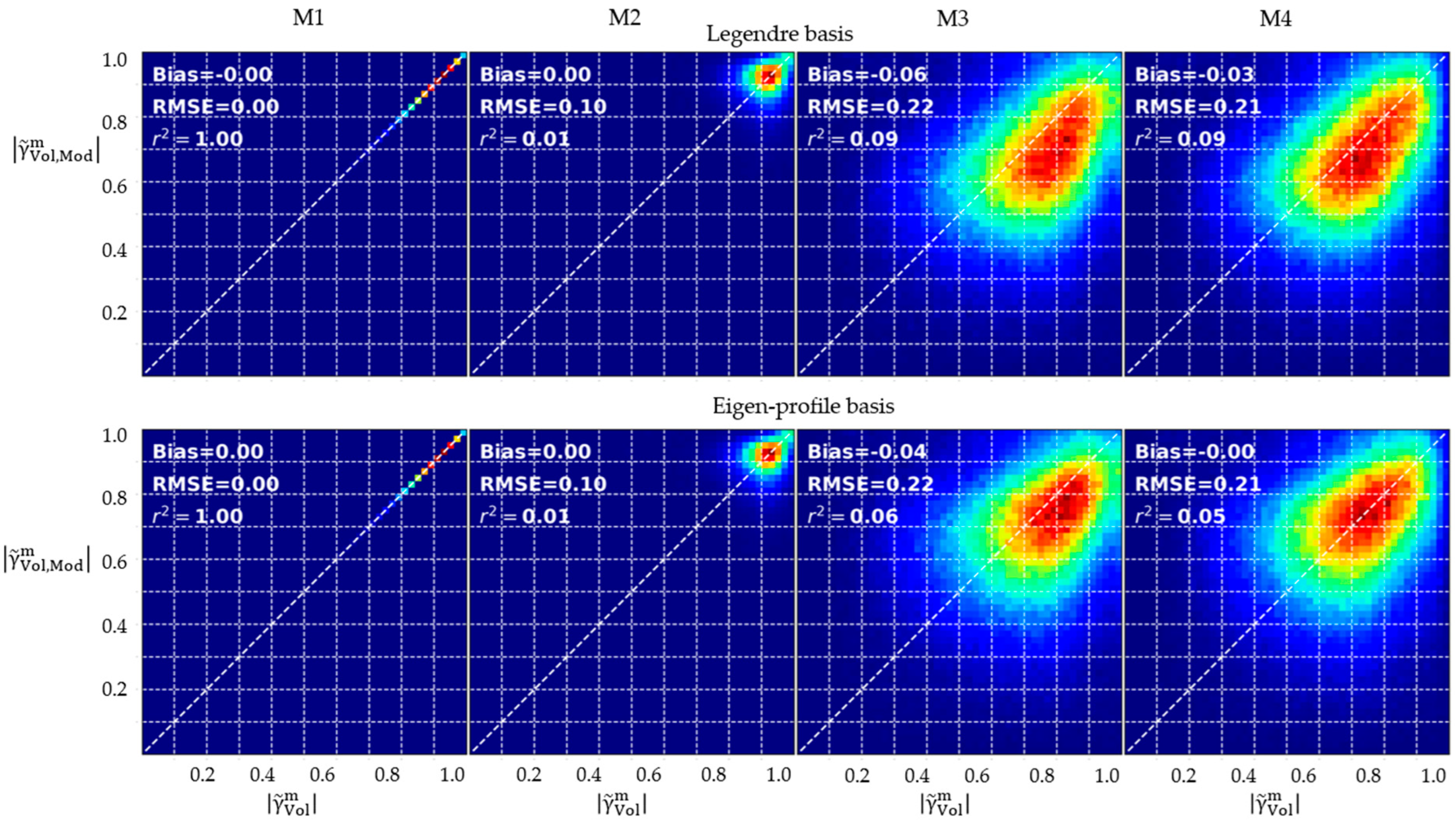
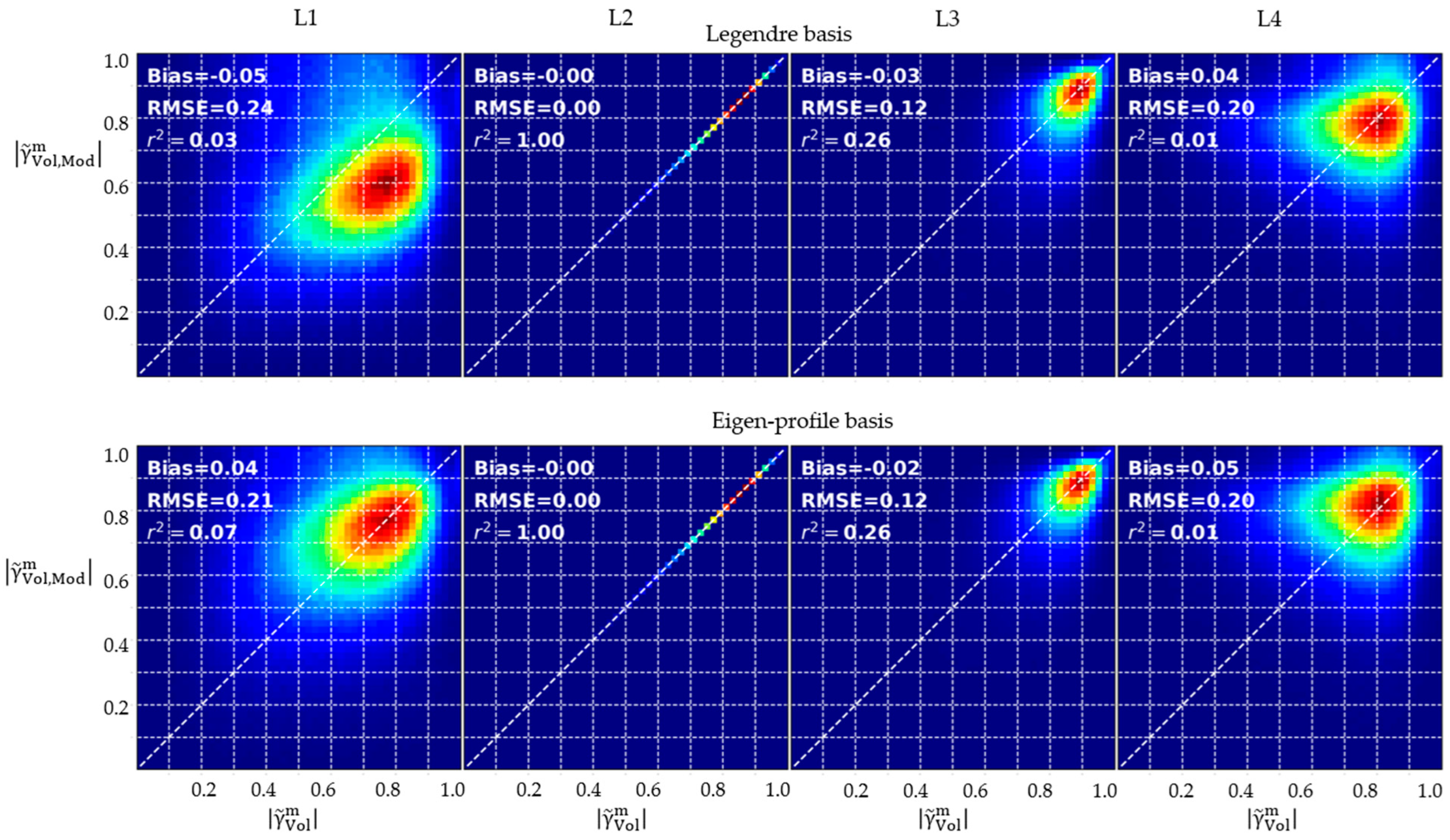
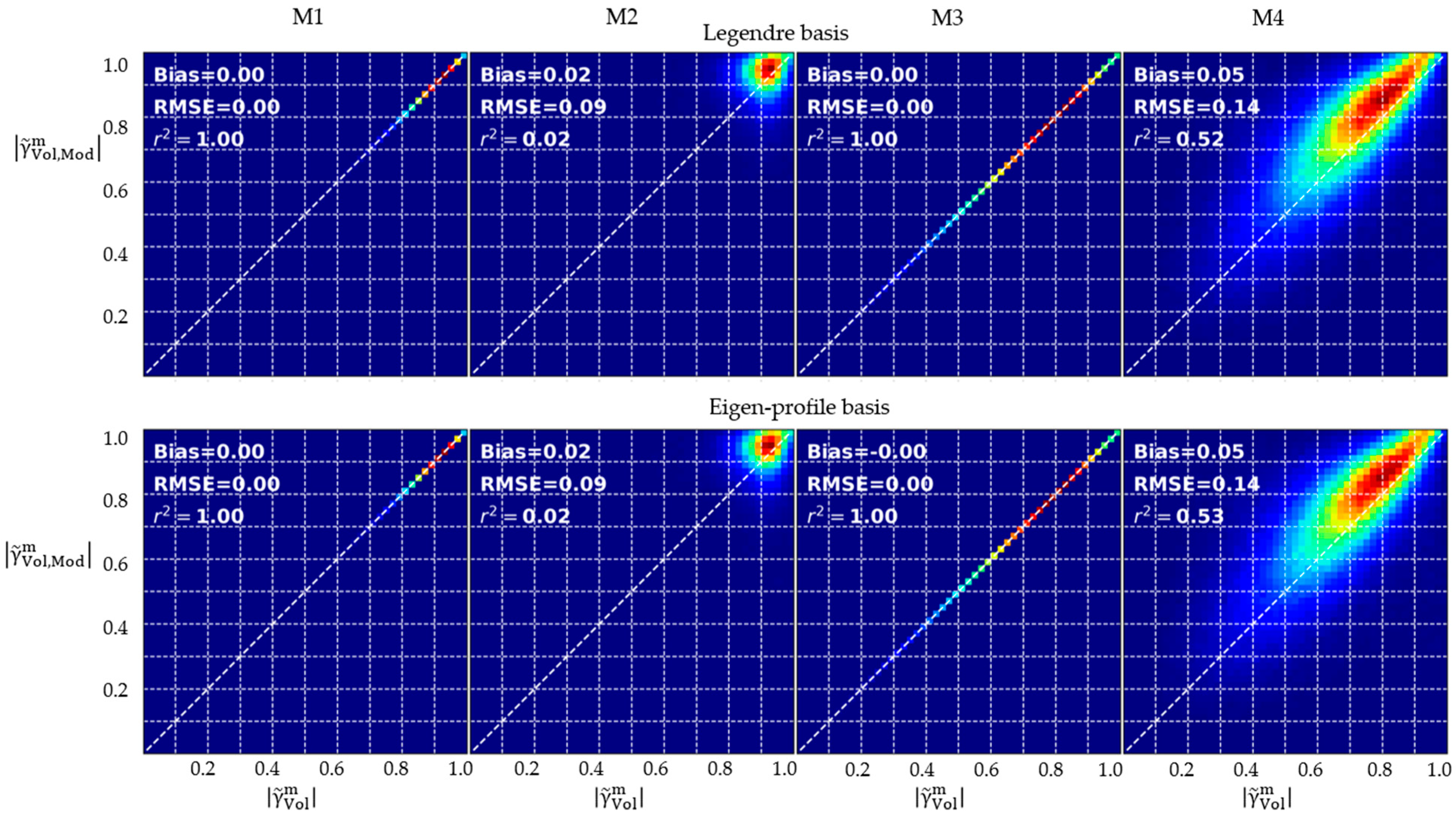
4.1. General Reconstruction Performance
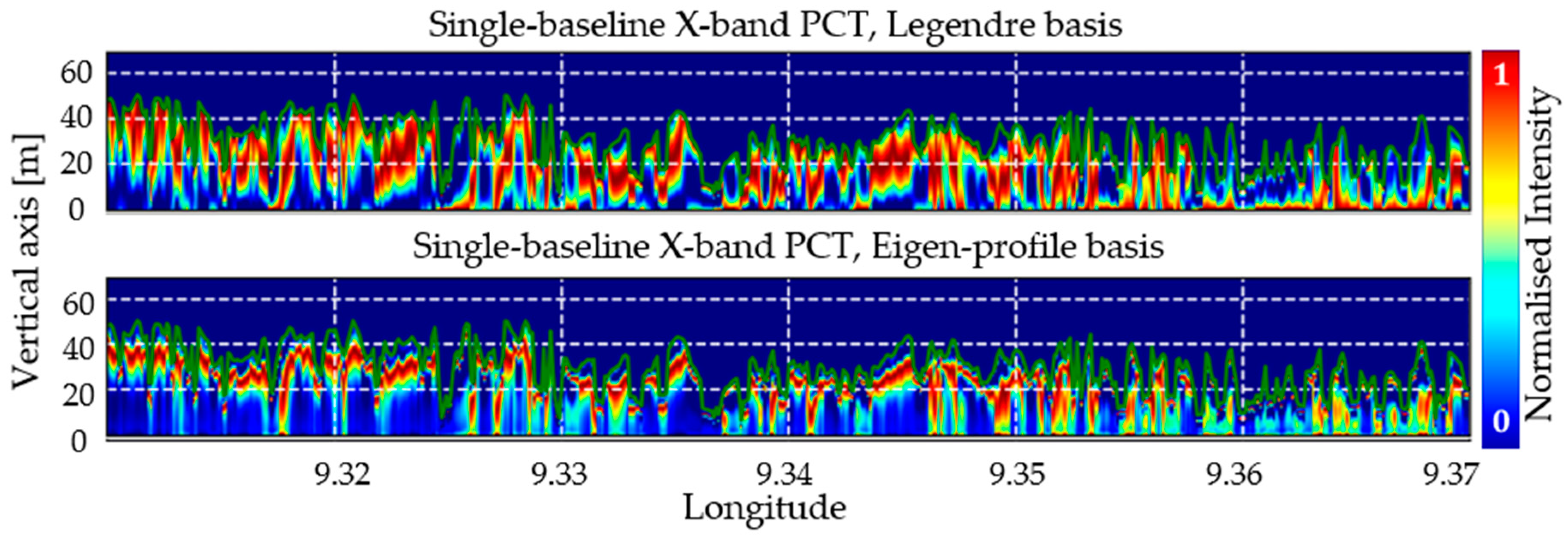
4.2. Single-Baseline Reconstruction
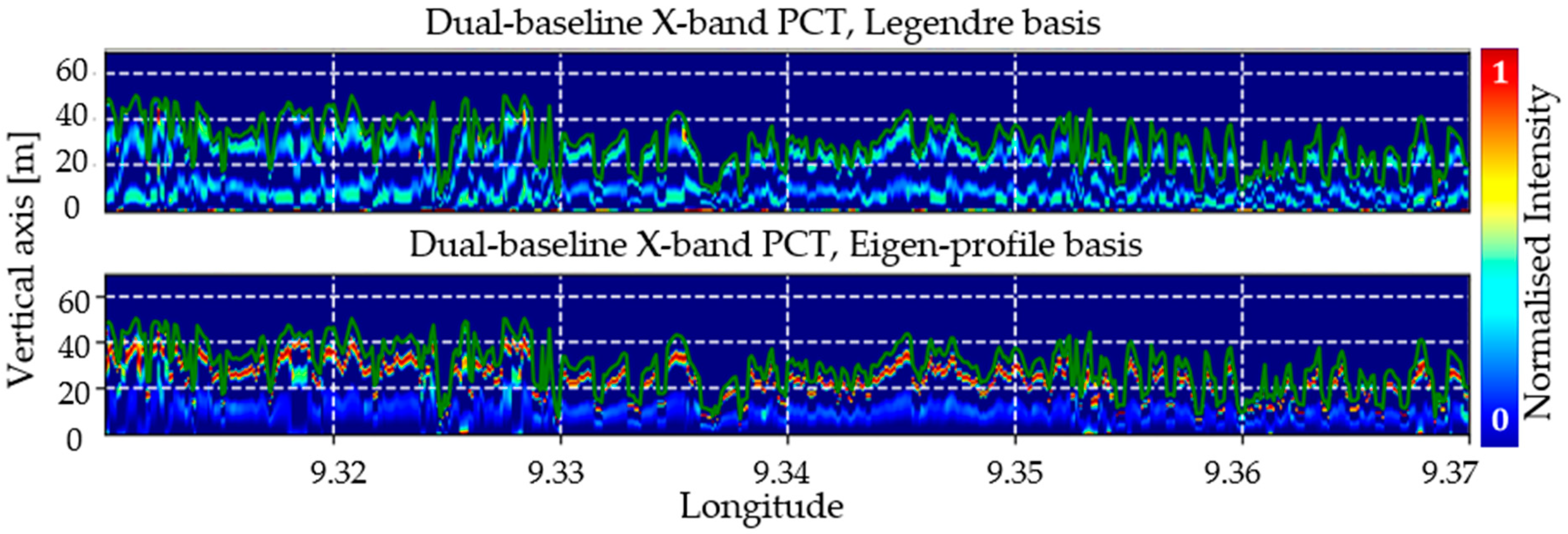
4.3. Dual-Baseline Reconstruction
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bohn, F.J.; Huth, A. The Importance of Forest Structure to Biodiversity–Productivity Relationships. R. Soc. Open Sci. 2017, 4, 160521. [Google Scholar]
- Fischer, R.; Knapp, N.; Bohn, F.; Shugart, H.H.; Huth, A. The Relevance of Forest Structure for Biomass and Productivity in Temperate Forests: New Perspectives for Remote Sensing. Surv. Geophys. 2019, 40, 709–734. [Google Scholar] [CrossRef]
- Rödig, E.; Cuntz, M.; Rammig, A.; Fischer, R.; Taubert, F.; Huth, A. The Importance of Forest Structure for Carbon Fluxes of the Amazon Rainforest. Environ. Res. Lett. 2018, 13, 054013. [Google Scholar] [CrossRef]
- Frolking, S.; Palace, M.W.; Clark, D.B.; Chambers, J.Q.; Shugart, H.H.; Hurtt, G.C. Forest Disturbance and Recovery: A General Review in the Context of Spaceborne Remote Sensing of Impacts on Aboveground Biomass and Canopy Structure. J. Geophys. Res. 2009, 114, 2008JG000911. [Google Scholar] [CrossRef]
- Smith, R.I.; Schreuder, H.T.; Gregoire, T.G.; Wood, G.B. Sampling Methods for Multiresource Forest Inventory. Biometrics 1994, 50, 1235. [Google Scholar] [CrossRef]
- Dubayah, R.O.; Drake, J.B. Lidar Remote Sensing for Forestry. J. For. 2000, 98, 44–46. [Google Scholar]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; Van Breugel, M. A Universal Airborne LiDAR Approach for Tropical Forest Carbon Mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar] [CrossRef]
- Blair, J.; Hofton, M. AfriSAR LVIS L2 Geolocated Surface Elevation Product, Version 1; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA.
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-Resolution Laser Ranging of the Earth’s Forests and Topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Yang, W.; Ni-Meister, W.; Lee, S. Assessment of the Impacts of Surface Topography, off-Nadir Pointing and Vegetation Structure on Vegetation Lidar Waveforms Using an Extended Geometric Optical and Radiative Transfer Model. Remote Sens. Environ. 2011, 115, 2810–2822. [Google Scholar] [CrossRef]
- Del Río, M.; Pretzsch, H.; Alberdi, I.; Bielak, K.; Bravo, F.; Brunner, A.; Condés, S.; Ducey, M.J.; Fonseca, T.; Von Lüpke, N.; et al. Characterization of the Structure, Dynamics, and Productivity of Mixed-Species Stands: Review and Perspectives. Eur. J. For. Res. 2016, 135, 23–49. [Google Scholar] [CrossRef]
- Pardini, M.; Armston, J.; Qi, W.; Lee, S.K.; Tello, M.; Cazcarra Bes, V.; Choi, C.; Papathanassiou, K.P.; Dubayah, R.O.; Fatoyinbo, L.E. Early Lessons on Combining Lidar and Multi-Baseline SAR Measurements for Forest Structure Characterization. Surv. Geophys. 2019, 40, 803–837. [Google Scholar] [CrossRef]
- Reigber, A.; Moreira, A. First Demonstration of Airborne SAR Tomography Using Multibaseline L-Band Data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Lombardini, F.; Reigber, A. Adaptive Spectral Estimation for Multibaseline SAR Tomography with Airborne L-Band Data. In Proceedings of the IGARSS 2003. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Proceedings (IEEE Cat. No.03CH37477). IEEE: Toulouse, France, 2003; Volume 3, pp. 2014–2016. [Google Scholar]
- Dubois-Fernandez, P.C.; Le Toan, D.S.; Oriot, H.; Chave, J.; Blanc, L.; Villard, L.; Davidson, M.W.J.; Petit, M. The TropiSAR Airborne Campaign in French Guiana: Objectives, Description, and Observed Temporal Behavior of the Backscatter Signal. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3228–3241. [Google Scholar] [CrossRef]
- Pardini, M.; Tello, M.; Cazcarra-Bes, V.; Papathanassiou, K.P.; Hajnsek, I. L-and P-Band 3-D SAR Reflectivity Profiles versus Lidar Waveforms: The AfriSAR Case. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3386–3401. [Google Scholar]
- Frey; E. Meier Analyzing Tomographic SAR Data of a Forest with Respect to Frequency, Polarization, and Focusing Technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3648–3659. [Google Scholar] [CrossRef]
- Nannini, M.; Martone, M.; Rizzoli, P.; Prats-Iraola, P.; Rodriguez-Cassola, M.; Reigber, A.; Moreira, A. Coherence-Based SAR Tomography for Spaceborne Applications. Remote Sens. Environ. 2019, 225, 107–114. [Google Scholar] [CrossRef]
- V. Cazcarra-Bes; M. Pardini; M. Tello; K. P. Papathanassiou Comparison of Tomographic SAR Reflectivity Reconstruction Algorithms for Forest Applications at L-Band. IEEE Trans. Geosci. Remote Sens. 2020, 58, 147–164. [Google Scholar] [CrossRef]
- Cloude, S.R. Polarization Coherence Tomography. Radio Sci. 2006, 41, 1–27. [Google Scholar] [CrossRef]
- Cloude, S.R. Dual-Baseline Coherence Tomography. IEEE Geosci. Remote Sens. Lett. 2007, 4, 127–131. [Google Scholar] [CrossRef]
- Cloude, S. Polarisation: Applications in Remote Sensing; Oxford University Press: Oxford, UK, 2009; ISBN 978-0-19-956973-1. [Google Scholar]
- Poorazimy, M.; Shataee, S.; Aghababaei, H.; Tomppo, E.; Praks, J. First Demonstration of Space-Borne Polarization Coherence Tomography for Characterizing Hyrcanian Forest Structural Diversity. Remote Sens. 2023, 15, 555. [Google Scholar]
- Zhao, R.; Cao, S.; Zhu, J.; Fu, L.; Xie, Y.; Zhang, T.; Fu, H. A Dual-Baseline PolInSAR Method for Forest Height and Vertical Profile Function Inversion Based on the Polarization Coherence Tomography Technique. Forests 2023, 14, 626. [Google Scholar]
- Praks, J.; Kugler, F.; Hyyppa, J.; Papathanassiou, K.; Hallikainen, M. SAR Coherence Tomography for Boreal Forest with Aid of Laser Measurements. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7 July 2008; Volume 2, p. II–469. [Google Scholar]
- Krieger, A.; Moreira, H.; Fiedler, I.; Hajnsek, M.; Werner, M.; Younis, M. Zink TanDEM-X: A Satellite Formation for High-Resolution SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Quegan, S.; Le Toan, T.; Chave, J.; Dall, J.; Exbrayat, J.-F.; Minh, D.H.T.; Lomas, M.; D’Alessandro, M.M.; Paillou, P.; Papathanassiou, K.; et al. The European Space Agency BIOMASS Mission: Measuring Forest above-Ground Biomass from Space. Remote Sens. Environ. 2019, 227, 44–60. [Google Scholar] [CrossRef]
- Zhang, H.; Ma, P.; Wang, C. A New Function Expansion for Polarization Coherence Tomography. IEEE Geosci. Remote Sens. Lett. 2012, 9, 891–895. [Google Scholar] [CrossRef]
- Guliaev, R.; Cazcarra-Bes, V.; Pardini, M.; Papathanassiou, K. Forest Height Estimation by Means of TanDEM-X InSAR and Waveform Lidar Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3084–3094. [Google Scholar]
- Choi, C.; Cazcarra-Bes, V.; Guliaev, R.; Pardini, M.; Papathanassiou, K.P.; Qi, W.; Armston, J.; Dubayah, R.O. Large-Scale Forest Height Mapping by Combining TanDEM-X and GEDI Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 2374–2385. [Google Scholar] [CrossRef]
- Choi, C.; Pardini, M.; Armston, J.; Papathanassiou, K.P. Forest Biomass Mapping Using Continuous InSAR and Discrete Waveform Lidar Measurements: A TanDEM-X/GEDI Test Study. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 7675–7689. [Google Scholar] [CrossRef]
- Qi, W.; Armston, J.; Choi, C.; Stovall, A.; Saarela, S.; Pardini, M.; Fatoyinbo, L.; Papathanasiou, K.; Dubayah, R. Mapping Large-Scale Pantropical Forest Canopy Height by Integrating GEDI Lidar and TanDEM-X InSAR Data. 2023. Available online: https://www.researchsquare.com/article/rs-3306982/v1 (accessed on 20 May 2024).
- Schlund, M.; Wenzel, A.; Camarretta, N.; Stiegler, C.; Erasmi, S. Vegetation Canopy Height Estimation in Dynamic Tropical Landscapes with TanDEM-X Supported by GEDI Data. Methods Ecol. Evol. 2023, 14, 1639–1656. [Google Scholar] [CrossRef]
- Yu, Y.; Lei, Y.; Siqueira, P. Large-Scale Forest Height Mapping in the Northeastern U.S. Using L-Band Spaceborne Repeat-Pass SAR Interferometry and GEDI LiDAR Data. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16 July 2023; pp. 1760–1763. [Google Scholar]
- Lei, Y.; Siqueira, P.; Torbick, N.; Ducey, M.; Chowdhury, D.; Salas, W. Generation of Large-Scale Moderate-Resolution Forest Height Mosaic with Spaceborne Repeat-Pass SAR Interferometry and Lidar. IEEE Trans. Geosci. Remote Sens. 2018, 57, 770–787. [Google Scholar]
- Treuhaft, R.N.; Chapman, B.D.; Dos Sãntos, J.R.; Gonçalves, F.G.; Dutra, L.V.; Graça, P.M.; Drake, J.B. Vegetation Profiles in Tropical Forests from Multibaseline Interferometric Synthetic Aperture Radar, Field, and Lidar Measurements. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Fatoyinbo, T.; Armston, J.; Simard, M.; Saatchi, S.; Denbina, M.; Lavalle, M.; Hofton, M.; Tang, H.; Marselis, S.; Pinto, N.; et al. The NASA AfriSAR Campaign: Airborne SAR and Lidar Measurements of Tropical Forest Structure and Biomass in Support of Current and Future Space Missions. Remote Sens. Environ. 2021, 264, 112533. [Google Scholar] [CrossRef]
- Hagberg, J.O.; Ulander, L.M.; Askne, J. Repeat-Pass SAR Interferometry over Forested Terrain. IEEE Trans. Geosci. Remote Sens. 1995, 33, 331–340. [Google Scholar]
- Askne, J.I.; Dammert, P.B.; Ulander, L.M.; Smith, G. C-Band Repeat-Pass Interferometric SAR Observations of the Forest. IEEE Trans. Geosci. Remote Sens. 1997, 35, 25–35. [Google Scholar]
- Chen, H.; Cloude, S.R.; White, J.C. Using GEDI Waveforms for Improved TanDEM-X Forest Height Mapping: A Combined SINC + Legendre Approach. Remote Sens. 2021, 13. [Google Scholar] [CrossRef]
- Martone, M.; Rizzoli, P.; Wecklich, C.; González, C.; Bueso-Bello, J.-L.; Valdo, P.; Schulze, D.; Zink, M.; Krieger, G.; Moreira, A. The Global Forest/Non-Forest Map from TanDEM-X Interferometric SAR Data. Remote Sens. Environ. 2018, 205, 352–373. [Google Scholar] [CrossRef]
- Hoekman, D.H.; Varekamp, C. Observation of Tropical Rain Forest Trees by Airborne High-Resolution Interferometric Radar. IEEE Trans. Geosci. Remote Sens. 2001, 39, 584–594. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | TanDEM-X Acquisition ID: TDM1_SAR__COS_BIST_SM_S_SRA_ | Test Site | [rad/m] | Ambiguity Height [m] | Orbit |
|---|---|---|---|---|---|
| L1 | 20101231T045618_20101231T045626 | Lopé | 0.131 | 48.0 | Desc |
| L2 | 20111002T045625_20111002T045633 | Lopé | 0.076 | 82.7 | Desc |
| L3 | 20121215T045627_20121215T045635 | Lopé | 0.068 | 92.4 | Desc |
| L4 | 20160125T173041_20160125T173048 | Lopé | 0.100 | 62.8 | Asc |
| M1 | 20151111T050508_20151111T050516 | Mondah | 0.062 | 101.3 | Desc |
| M2 | 20161211T050516_20161211T050524 | Mondah | 0.052 | 120.8 | Desc |
| M3 | 20171117T050524_20171117T050532 | Mondah | 0.123 | 51.1 | Desc |
| M4 | 20190704T050534_20190704T050542 | Mondah | 0.123 | 51.1 | Desc |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guliaev, R.; Pardini, M.; Papathanassiou, K.P. Forest 3D Radar Reflectivity Reconstruction at X-Band Using a Lidar Derived Polarimetric Coherence Tomography Basis. Remote Sens. 2024, 16, 2146. https://doi.org/10.3390/rs16122146
Guliaev R, Pardini M, Papathanassiou KP. Forest 3D Radar Reflectivity Reconstruction at X-Band Using a Lidar Derived Polarimetric Coherence Tomography Basis. Remote Sensing. 2024; 16(12):2146. https://doi.org/10.3390/rs16122146
Chicago/Turabian StyleGuliaev, Roman, Matteo Pardini, and Konstantinos P. Papathanassiou. 2024. "Forest 3D Radar Reflectivity Reconstruction at X-Band Using a Lidar Derived Polarimetric Coherence Tomography Basis" Remote Sensing 16, no. 12: 2146. https://doi.org/10.3390/rs16122146
APA StyleGuliaev, R., Pardini, M., & Papathanassiou, K. P. (2024). Forest 3D Radar Reflectivity Reconstruction at X-Band Using a Lidar Derived Polarimetric Coherence Tomography Basis. Remote Sensing, 16(12), 2146. https://doi.org/10.3390/rs16122146