



Advancing Sea Surface Height Retrieval through Global Navigation Satellite System Reflectometry: A Model Interaction Approach with Cyclone Global Navigation Satellite System and FengYun-3E Measurements

Abstract
1. Introduction
- This research demonstrates the effective use of ANNs for retrieving SSHs from datasets provided by the spaceborne GNSS-R platforms CYGNSS and FY-3E, achieving meter-level precision in SSH estimations.
- The research develops distinct models, each utilizing KF, with implementations based on either CV or CA to describe changes in SSH.
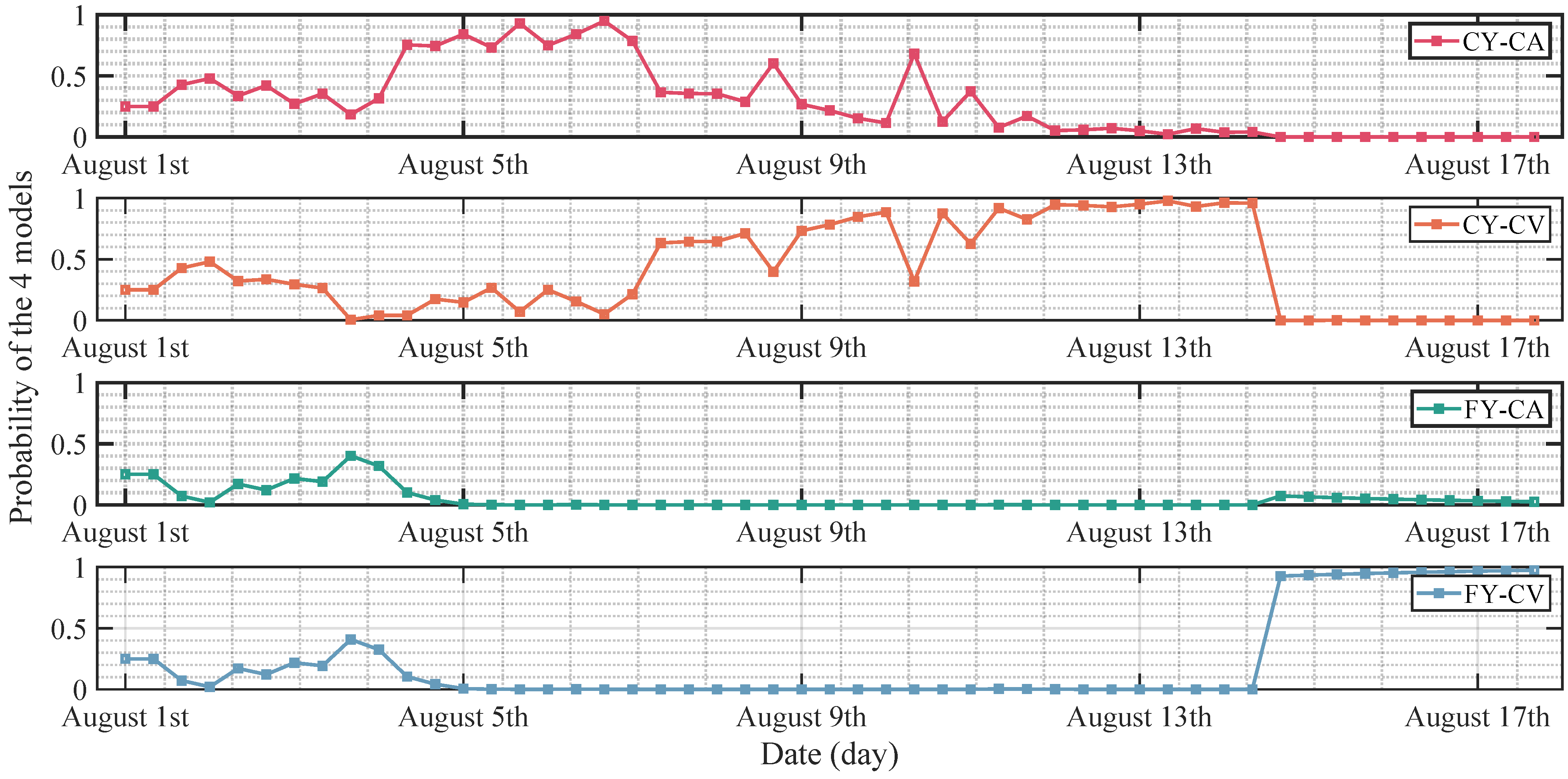
- This research employs the IMM-KF as the method for integrating and managing the likelihood conversion of four distinct models. It enables the adaptation of the filters to dynamic changes and complex environments.
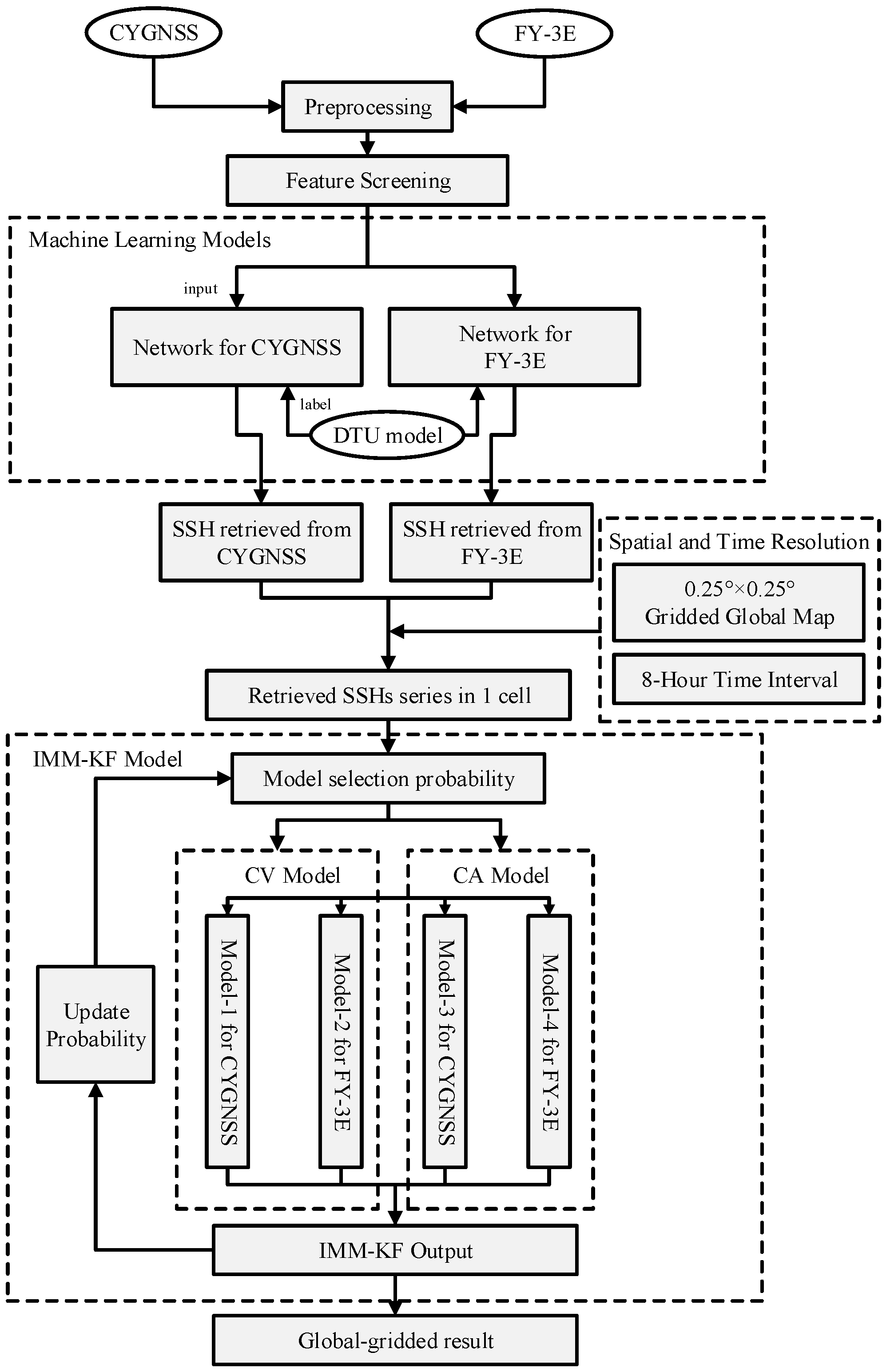
2. Methodology
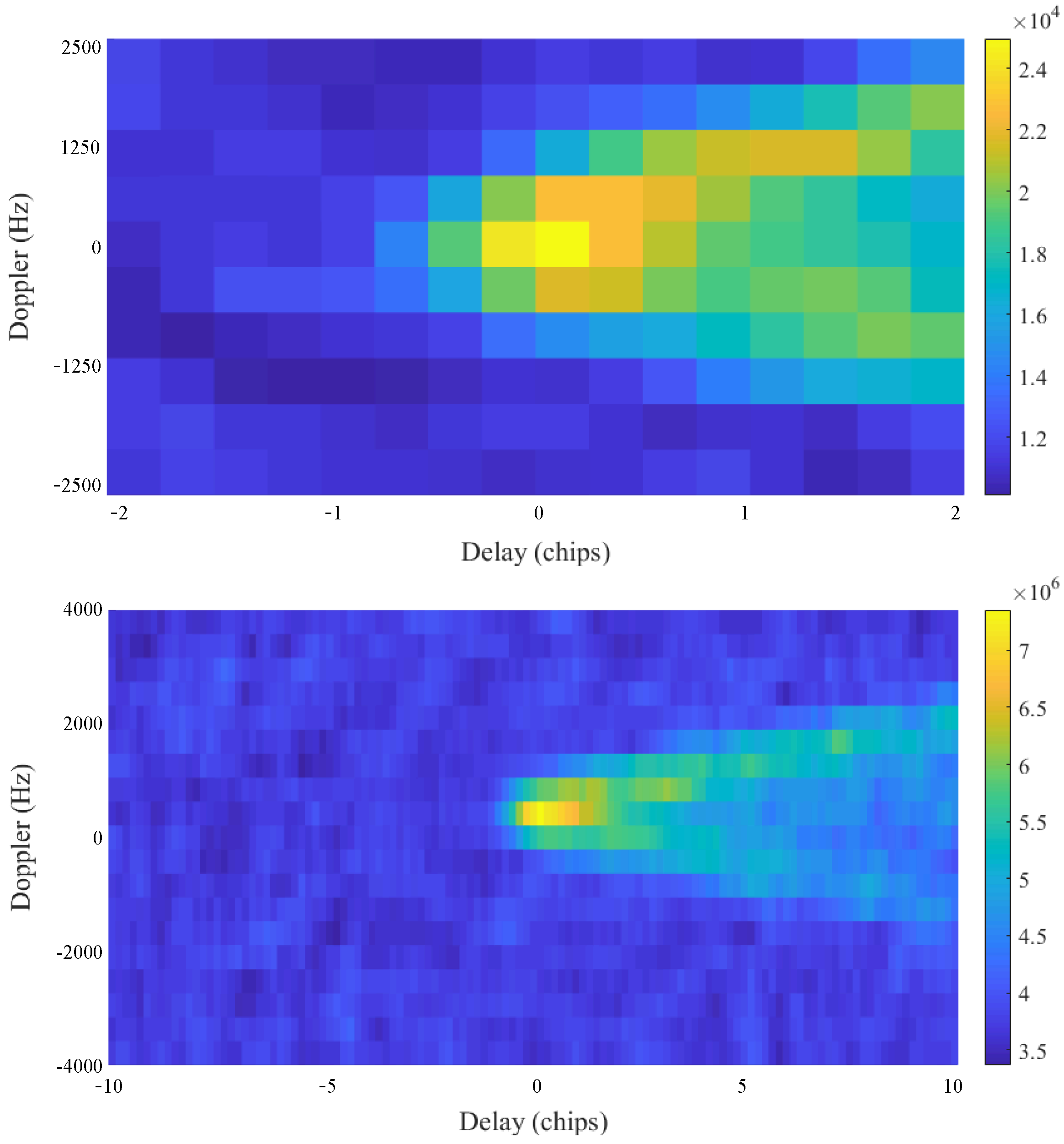
2.1. GNSS-R Altimetry Principle Using DDM
2.2. Machine Learning SSH Retrieved Model
2.2.1. Dataset Preparation
2.2.2. Training and Validation
2.3. SSH Processing Model Based on Kalman Filter
2.4. IMM-KF Method Designing and Implementing
2.4.1. Model Interactions
2.4.2. Filter Input Calculation
2.4.3. Parallel Kalman Filtering
2.4.4. The Maximum Likelihood Estimation Equation Construction
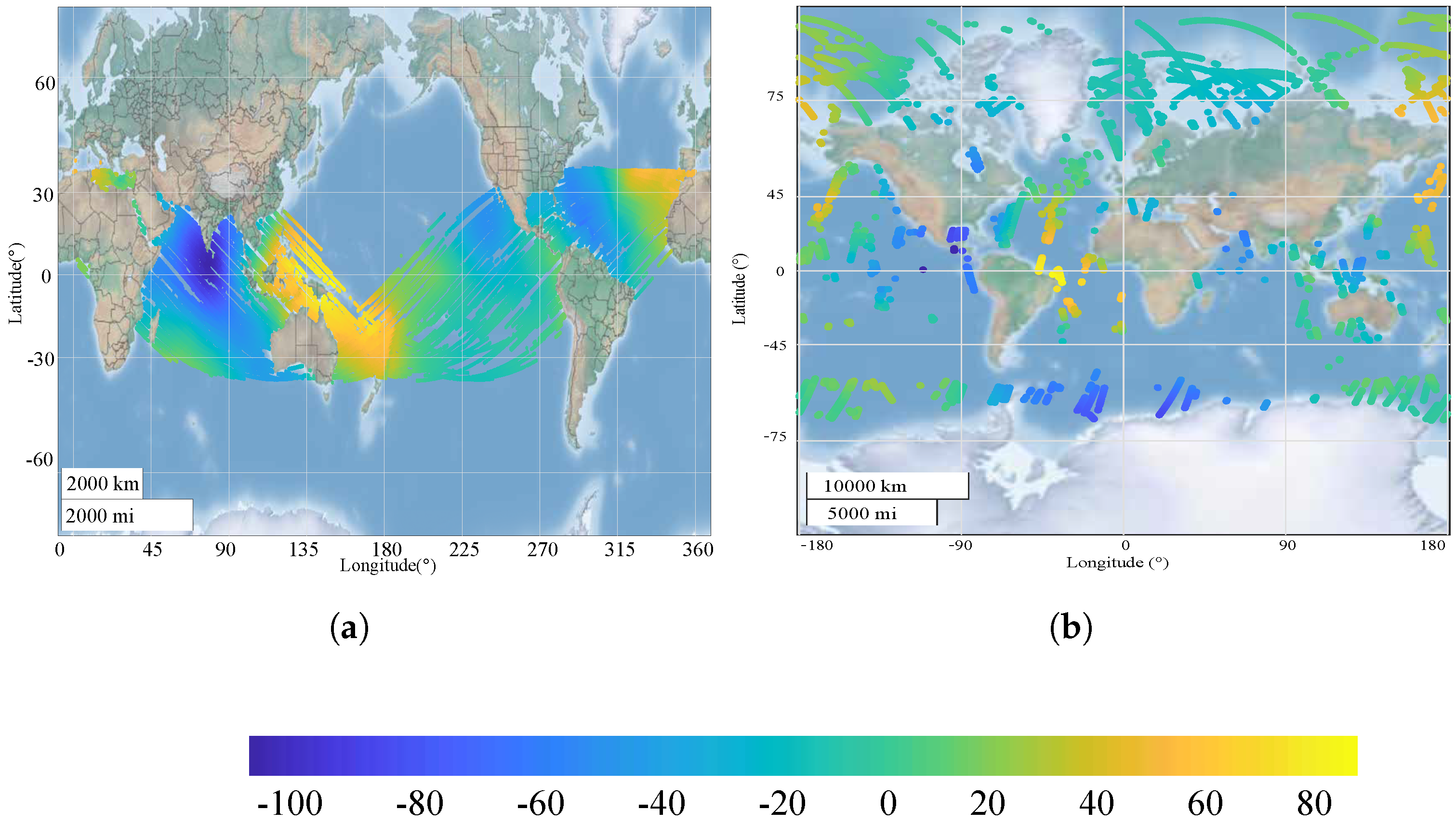
3. Results and Analysis
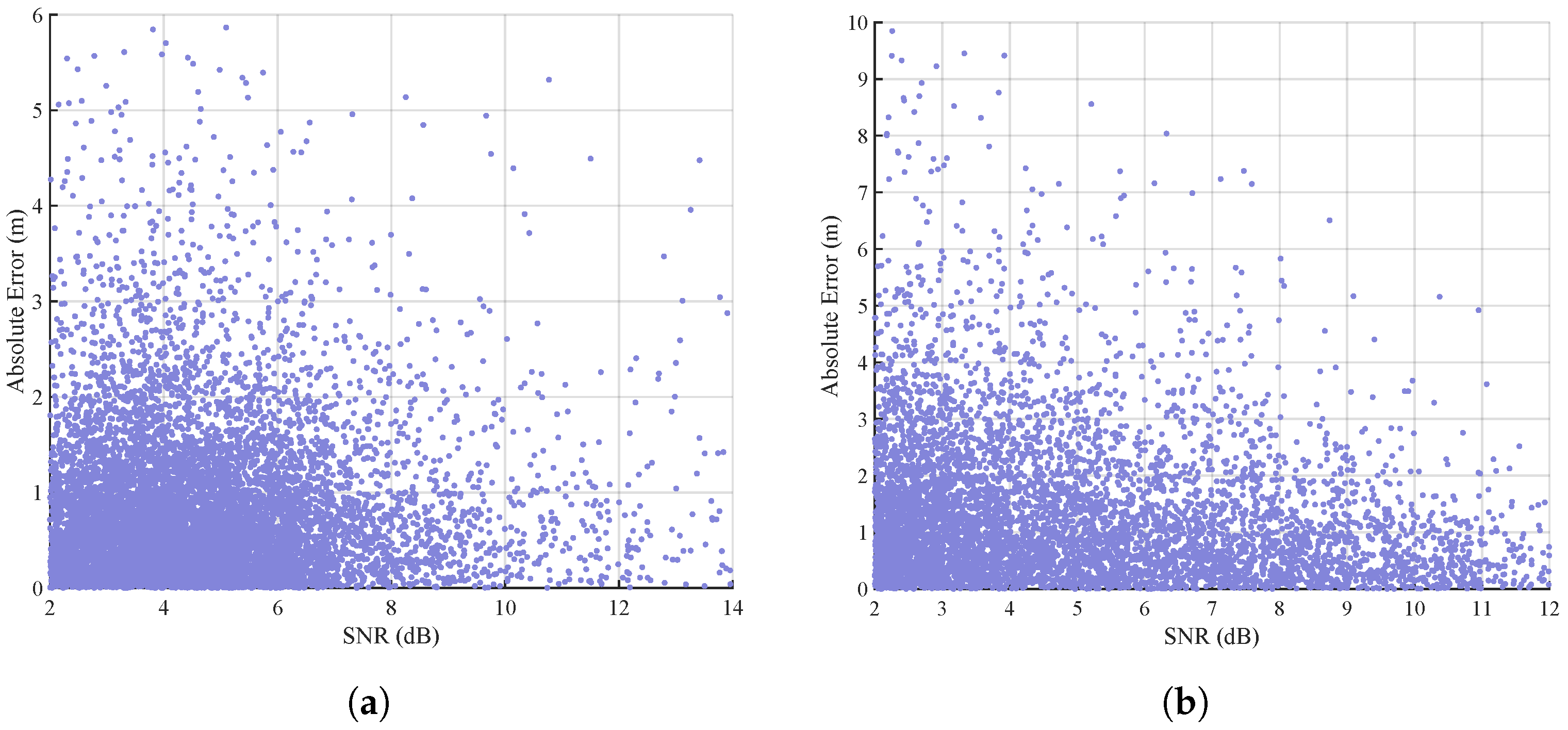
3.1. Machine Learning Retrieved Results
3.2. IMM-KF Results and Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cazenave, A.; Cozannet, G.L. Sea level rise and its coastal impacts. Earth Future 2014, 2, 15–34. [Google Scholar] [CrossRef]
- Hauer, M.E.; Fussell, E.; Mueller, V.; Burkett, M.; Call, M.; Abel, K.; McLeman, R.; Wrathall, D. Sea-level rise and human migration. Nat. Rev. Earth Environ. 2020, 1, 28–39. [Google Scholar] [CrossRef]
- Mu, D.; Xu, T.; Guan, M. Sea level instantaneous budget for 2003–2015. Geophys. J. Int. 2022, 229, 828–837. [Google Scholar] [CrossRef]
- Abdalla, S.; Kolahchi, A.A.; Ablain, M.; Adusumilli, S.; Bhowmick, S.A.; Alou-Font, E.; Amarouche, L.; Andersen, O.B.; Antich, H.; Aouf, L.; et al. Altimetry for the future: Building on 25 years of progress. Adv. Space Res. 2021, 68, 319–363. [Google Scholar] [CrossRef]
- Benveniste, J.; Cazenave, A.; Vignudelli, S.; Fenoglio-Marc, L.; Shah, R.; Almar, R.; Andersen, O.; Birol, F.; Bonnefond, P.; Bouffard, J.; et al. Requirements for a coastal hazards observing system. Front. Mar. Sci. 2019, 6, 348. [Google Scholar] [CrossRef]
- Ehsan, S.; Begum, R.A.; Nor, N.G.M.; Maulud, K.N.A. Current and potential impacts of sea level rise in the coastal areas of Malaysia. IOP Conf. Ser. Earth Environ. Sci. 2019, 228, 012023. [Google Scholar] [CrossRef]
- Martinez-Felix, C.A.; Vazquez-Becerra, G.E.; Geremia-Nievinski, F.; Millan-Almaraz, J.R.; Franco-Ochoa, C.; Melgarejo-Morales, A.; Gaxiola-Camacho, J.R. Tidal measurements in the Gulf of Mexico: Intercomparison of coastal tide gauge, insular GNSS reflectometry and SAR altimetry. GPS Solut. 2022, 26, 22. [Google Scholar] [CrossRef]
- Ballarotta, M.; Ubelmann, C.; Pujol, M.I.; Taburet, G.; Fournier, F.; Legeais, J.F.; Faugère, Y.; Delepoulle, A.; Chelton, D.; Dibarboure, G.; et al. On the resolutions of ocean altimetry maps. Ocean Sci. 2019, 15, 1091–1109. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Assessment of spaceborne GNSS-R ocean altimetry performance using CYGNSS mission raw data. IEEE Trans. Geosci. Remote Sens. 2019, 58, 238–250. [Google Scholar] [CrossRef]
- Tye, J.; Jales, P.; Unwin, M.; Underwood, C. The first application of stare processing to retrieve mean square slope using the SGR-ReSI GNSS-R experiment on TDS-1. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4669–4677. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Crespo, J.A.; Akbar, R.; Bringer, A.; Warnock, A.; Morris, M.; Ruf, C. The CYGNSS mission: On-going science team investigations. Remote Sens. 2021, 13, 1814. [Google Scholar] [CrossRef]
- Niu, X.; Lu, F.; Liu, Y.; Jing, C.; Wan, B. Application and technology of Bufeng-1 GNSS-R demonstration satellites on sea surface wind speed detection. Lect. Notes Electr. Eng. 2020, 650, 206–213. [Google Scholar]
- Nan, Y.; Ye, S.; Liu, J.; Guo, B.; Zhang, S.; Li, W. Signal-to-noise ratio analyses of spaceborne GNSS-reflectometry from Galileo and BeiDou satellites. Remote Sens. 2021, 14, 35. [Google Scholar] [CrossRef]
- Zhang, T.; Yang, L.; Nan, H.; Yin, C.; Sun, B.; Yang, D.; Hong, X.; Lopez-Baeza, E. In-Situ GNSS-R and Radiometer Fusion Soil Moisture Retrieval Model Based on LSTM. Remote Sens. 2023, 15, 2693. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Monerris, A.; Bosch-Lluis, X.; Camps, A.; Vall-Llossera, M.; Marchan-Hernández, J.F.; Ramos-Perez, I.; Valencia, E.; Martínez-Fernández, J.; Sánchez-Martín, N.; et al. Soil moisture and vegetation height retrieval using GNSS-R techniques. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 3, pp. III-869–III-872. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W.; Jin, S.; Jia, Y. Pan-tropical soil moisture mapping based on a three-layer model from CYGNSS GNSS-R data. Remote Sens. Environ. 2020, 247, 111944. [Google Scholar] [CrossRef]
- Hu, Y.; Jiang, Z.; Liu, W.; Yuan, X.; Hu, Q.; Wickert, J. GNSS-R Sea Ice Detection Based on Linear Discriminant Analysis. IEEE Trans. Geosci. Remote Sens. 2023. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea ice remote sensing using GNSS-R: A review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Measuring Greenland ice sheet melt using spaceborne GNSS reflectometry from TechDemoSat-1. Geophys. Res. Lett. 2020, 47, e2019GL086477. [Google Scholar] [CrossRef]
- Xie, Y.; Yan, Q. Stand-Alone Retrieval of Sea Ice Thickness From FY-3E GNOS-R Data. IEEE Geosci. Remote Sens. Lett. 2024, 21, 2000305. [Google Scholar] [CrossRef]
- Downs, B.; Kettner, A.J.; Chapman, B.D.; Brakenridge, G.R.; O’Brien, A.J.; Zuffada, C. Assessing the Relative Performance of GNSS-R Flood Extent Observations: Case Study in South Sudan. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–13. [Google Scholar] [CrossRef]
- Yan, Q.; Liu, S.; Chen, T.; Jin, S.; Xie, T.; Huang, W. Mapping Surface Water Fraction Over the Pan-Tropical Region Using CYGNSS Data. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–14. [Google Scholar] [CrossRef]
- Bu, J.; Yu, K.; Zuo, X.; Ni, J.; Li, Y.; Huang, W. GloWS-Net: A Deep Learning Framework for Retrieving Global Sea Surface Wind Speed Using Spaceborne GNSS-R Data. Remote Sens. 2023, 15, 590. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Morris, M. Latest Advances in the Global Navigation Satellite System—Reflectometry (GNSS-R) Field. Remote Sens. 2023, 15, 2157. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, W.; Liu, Z. Improving the spaceborne GNSS-R altimetric precision based on the novel multilayer feedforward neural network weighted joint prediction model. Def. Technol. 2024, 32, 271–284. [Google Scholar] [CrossRef]
- Cheng, Z.; Jin, T.; Chang, X.; Li, Y.; Wan, X. Evaluation of spaceborne GNSS-R based sea surface altimetry using multiple constellation signals. Front. Earth Sci. 2023, 10, 1079255. [Google Scholar] [CrossRef]
- Martin-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Saynisch, J.; Semmling, M.; Wickert, J.; Thomas, M. Potential of space-borne GNSS reflectometry to constrain simulations of the ocean circulation: A case study for the South African current system. Ocean Dyn. 2015, 65, 1441–1460. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.; Cipollini, P.; Zuffada, C. First spaceborne observation of sea surface height using GPS-Reflectometry. Geophys. Res. Lett. 2016, 43, 767–774. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martín-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Mashburn, J.; Axelrad, P.; Lowe, S.T.; Larson, K.M. Global ocean altimetry with GNSS reflections from TechDemoSat-1. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4088–4097. [Google Scholar] [CrossRef]
- Cardellach, E.; Li, W.; Rius, A.; Semmling, M.; Wickert, J.; Zus, F.; Ruf, C.S.; Buontempo, C. First Precise Spaceborne Sea Surface Altimetry With GNSS Reflected Signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 102–112. [Google Scholar] [CrossRef]
- Wang, Y.; Morton, Y.J. Coherent reflections using closed-loop PLL processing of CYGNSS IF data. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; IEEE: New York, NY, USA, 2019; pp. 8737–8740. [Google Scholar]
- Wang, Y.; Morton, Y. Coherent and semi-coherent spaceborne GNSS-R for land surface altimetry applications. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Virtual, 21–25 September 2020; pp. 3901–3908. [Google Scholar]
- Mashburn, J.; Axelrad, P.; Zuffada, C.; Loria, E.; O’Brien, A.; Haines, B. Improved GNSS-R ocean surface altimetry with CYGNSS in the seas of Indonesia. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6071–6087. [Google Scholar] [CrossRef]
- Hu, C.; Benson, C.R.; Qiao, L.; Rizos, C. The validation of the weight function in the leading-edge-derivative path delay estimator for space-based GNSS-R altimetry. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6243–6254. [Google Scholar] [CrossRef]
- Zhang, G.; Xu, Z.; Wang, F.; Yang, D.; Xing, J. Evaluation and correction of elevation angle influence for coastal GNSS-R ocean altimetry. Remote Sens. 2021, 13, 2978. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, S.; Han, Y.; Yang, S.; Hong, Z.; Ma, D.; Meng, W. Machine learning methods for spaceborne GNSS-R sea surface height measurement from TDS-1. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 1079–1088. [Google Scholar] [CrossRef]
- Arabi, S.; Asgarimehr, M.; Kada, M.; Wickert, J. Hybrid CNN-LSTM Deep Learning for Track-Wise GNSS-R Ocean Wind Speed Retrieval. Remote Sens. 2023, 15, 4169. [Google Scholar] [CrossRef]
- Xing, J.; Yang, D.; Zhang, Z.; Yang, P.; Wang, F. Development of F-ResNet for Spaceborne GNSS-R Sea Surface Height Measurement From CYGNSS. IEEE Commun. Lett. 2023, 27, 2712–2716. [Google Scholar] [CrossRef]
- Ansari, K.; Seok, H.W.; Jamjareegulgarn, P. Quasi zenith satellite system-reflectometry for sea-level measurement and implication of machine learning methodology. Sci. Rep. 2022, 12, 21445. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Cardellach, E.; Ribó, S.; Oliveras, S.; Rius, A. Exploration of multi-mission spaceborne GNSS-R raw IF data sets: Processing, data products and potential applications. Remote Sens. 2022, 14, 1344. [Google Scholar] [CrossRef]
- Kong, X.; Zhang, X.; Zhang, X.; Wang, C.; Chiang, H.D.; Li, P. Adaptive dynamic state estimation of distribution network based on interacting multiple model. IEEE Trans. Sustain. Energy 2021, 13, 643–652. [Google Scholar] [CrossRef]
- Lim, J.; Kim, H.S.; Park, H.M. Interactive-multiple-model algorithm based on minimax particle filtering. IEEE Signal Process. Lett. 2019, 27, 36–40. [Google Scholar] [CrossRef]
- Fan, X.; Wang, G.; Han, J.; Wang, Y. Interacting multiple model based on maximum correntropy Kalman filter. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3017–3021. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Zhang, P.; Hu, X.; Lu, Q.; Zhu, A.; Lin, M.; Sun, L.; Chen, L.; Xu, N. FY-3E: The First Operational Meteorological Satellite Mission in an Early Morning Orbit; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Wang, Q.; Zheng, W.; Wu, F.; Zhu, H.; Xu, A.; Shen, Y.; Zhao, Y. Information Fusion for Spaceborne GNSS-R Sea Surface Height Retrieval Using Modified Residual Multimodal Deep Learning Method. Remote Sens. 2023, 15, 1481. [Google Scholar] [CrossRef]
- Andersen, O.B.; Rose, S.K.; Abulaitijiang, A.; Zhang, S.; Fleury, S. The DTU21 global mean sea surface and first evaluation. Earth Syst. Sci. Data Discuss. 2023, 2023, 1–19. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CYGNSS | FY-3E | Description |
|---|---|---|
| , , | , , | The position of the transmitter in the X, Y, Z directions |
| , , | , , | The velocity of the transmitter in the X, Y, Z directions |
| , , | , , | The position of the receiver in the X, Y, Z directions |
| , , | , , | The velocity of the receiver in the X, Y, Z directions |
| The incidence angle of the specular point | ||
| The antenna gain of the receiver antenna in the direction of the specular point | ||
| ∖ | The DDM peak signal-to-noise ratio | |
| ∖ | The DDM specular point signal-to-noise ratio | |
| ∖ | The DDM specular point delay | |
| ∖ | The DDM peak delay | |
| ∖ | The DDM specular point Doppler shift | |
| ∖ | The additional range to the specular point |
| CYGNSS | FY-3E | |
|---|---|---|
| MAE (m) | 0.85 | 1.28 |
| RMSE (m) | 1.24 | 1.73 |
| (%) | 99.92 | 99.81 |
| SNR (dB) | CYGNSS | FY-3E | |
|---|---|---|---|
| MAE (m) | 2–6 | 1.01 | 1.85 |
| 6–10 | 0.90 | 1.74 | |
| >10 | 0.82 | 1.61 | |
| RMSE (m) | 2–6 | 1.30 | 1.85 |
| 6–10 | 1.21 | 1.77 | |
| >10 | 1.17 | 1.67 | |
| (%) | 2–6 | 99.90 | 99.77 |
| 6–10 | 99.93 | 99.82 | |
| >10 | 99.95 | 99.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, J.; Yang, D.; Zhang, Z.; Wang, F. Advancing Sea Surface Height Retrieval through Global Navigation Satellite System Reflectometry: A Model Interaction Approach with Cyclone Global Navigation Satellite System and FengYun-3E Measurements. Remote Sens. 2024, 16, 1896. https://doi.org/10.3390/rs16111896
Xing J, Yang D, Zhang Z, Wang F. Advancing Sea Surface Height Retrieval through Global Navigation Satellite System Reflectometry: A Model Interaction Approach with Cyclone Global Navigation Satellite System and FengYun-3E Measurements. Remote Sensing. 2024; 16(11):1896. https://doi.org/10.3390/rs16111896
Chicago/Turabian StyleXing, Jin, Dongkai Yang, Zhibo Zhang, and Feng Wang. 2024. "Advancing Sea Surface Height Retrieval through Global Navigation Satellite System Reflectometry: A Model Interaction Approach with Cyclone Global Navigation Satellite System and FengYun-3E Measurements" Remote Sensing 16, no. 11: 1896. https://doi.org/10.3390/rs16111896
APA StyleXing, J., Yang, D., Zhang, Z., & Wang, F. (2024). Advancing Sea Surface Height Retrieval through Global Navigation Satellite System Reflectometry: A Model Interaction Approach with Cyclone Global Navigation Satellite System and FengYun-3E Measurements. Remote Sensing, 16(11), 1896. https://doi.org/10.3390/rs16111896