
Mesoscale Eddy Effects on Vertical Correlation of Sound Field and Array Gain Performance

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
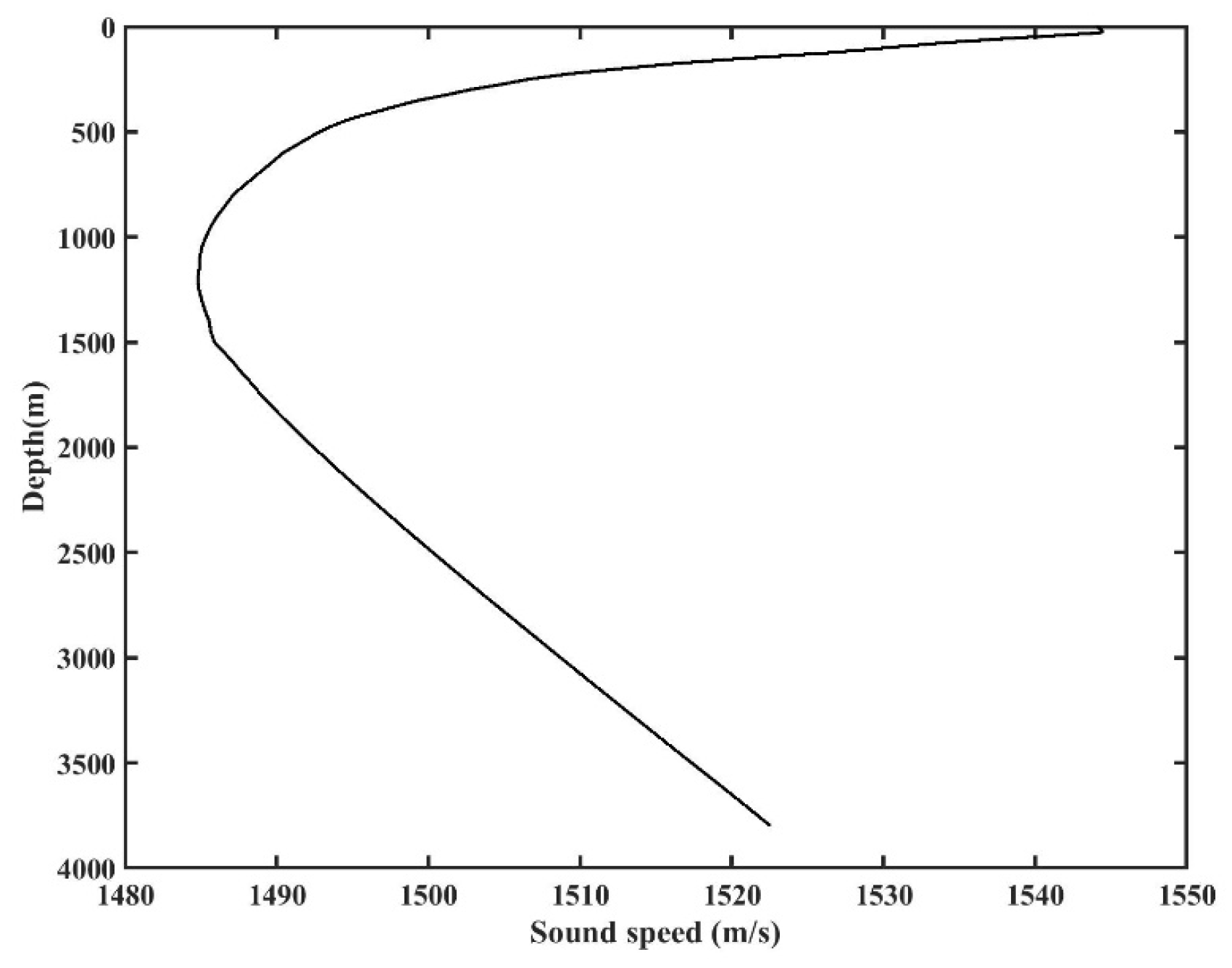
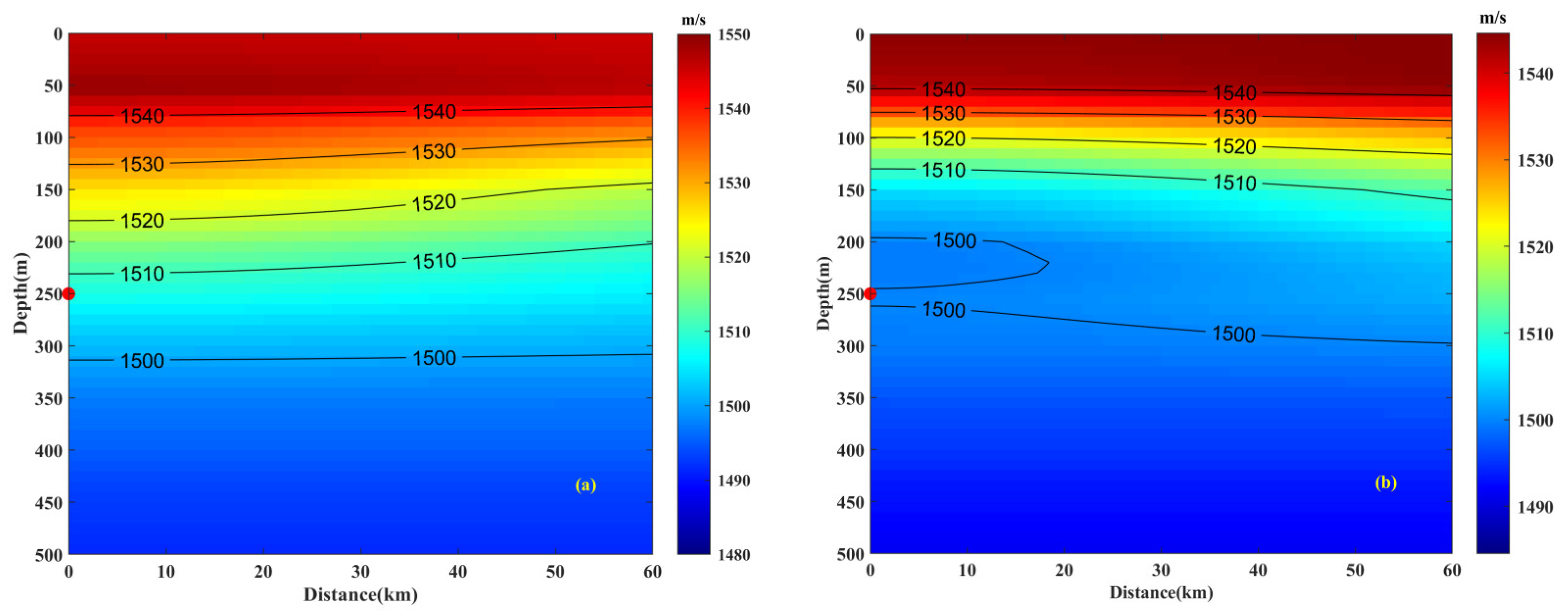
2.1. Sound Propagation Environment
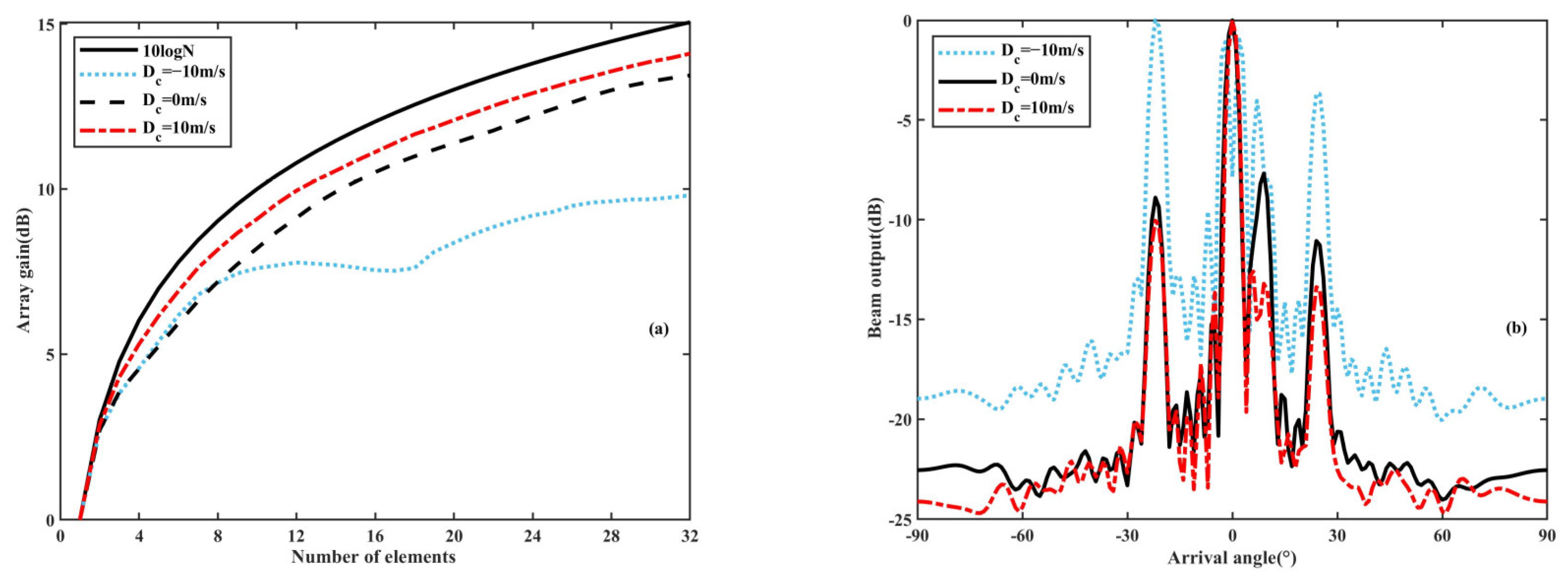
2.2. Vertical Correlation and Array Gain
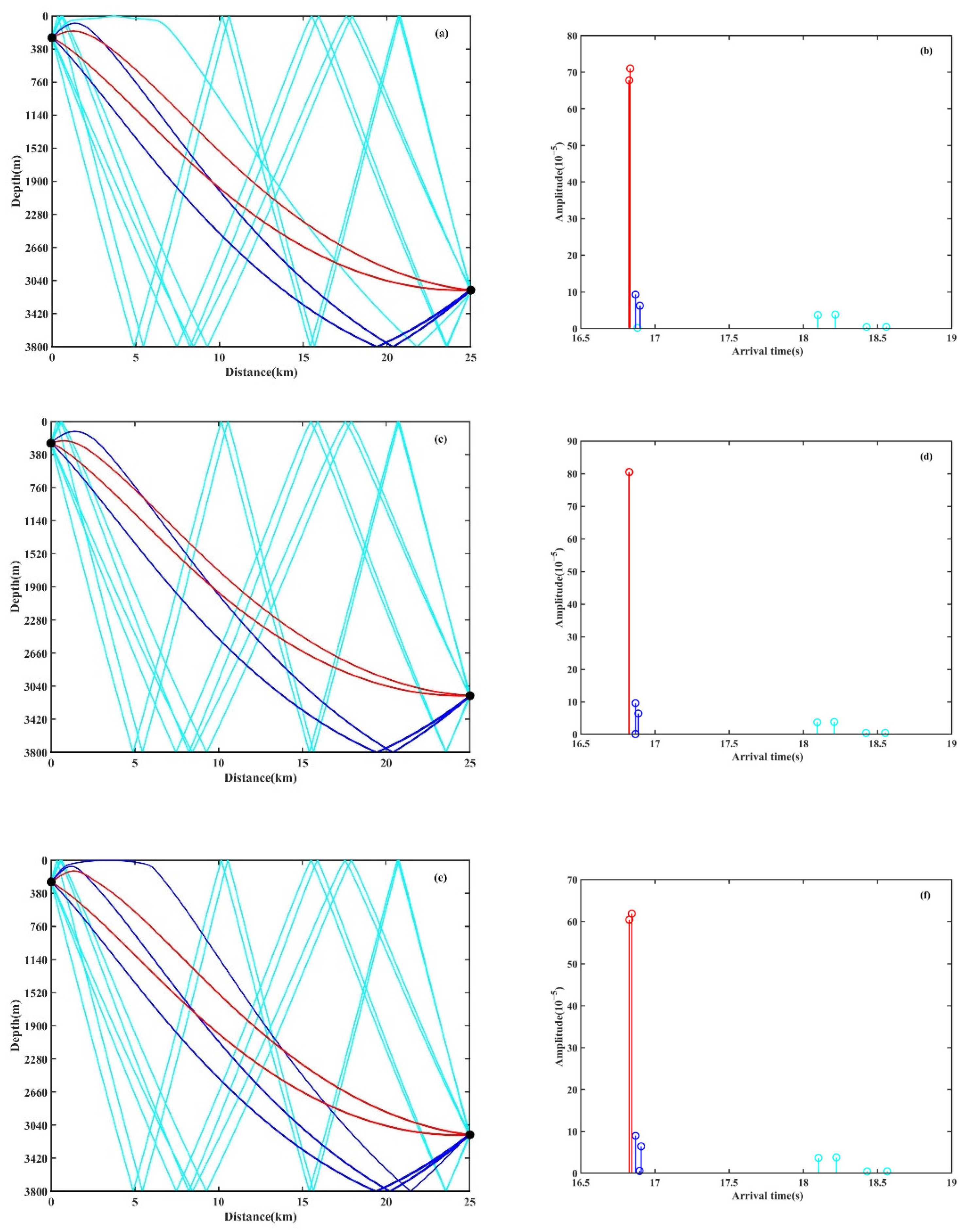
2.3. Acoustic Modelling Method
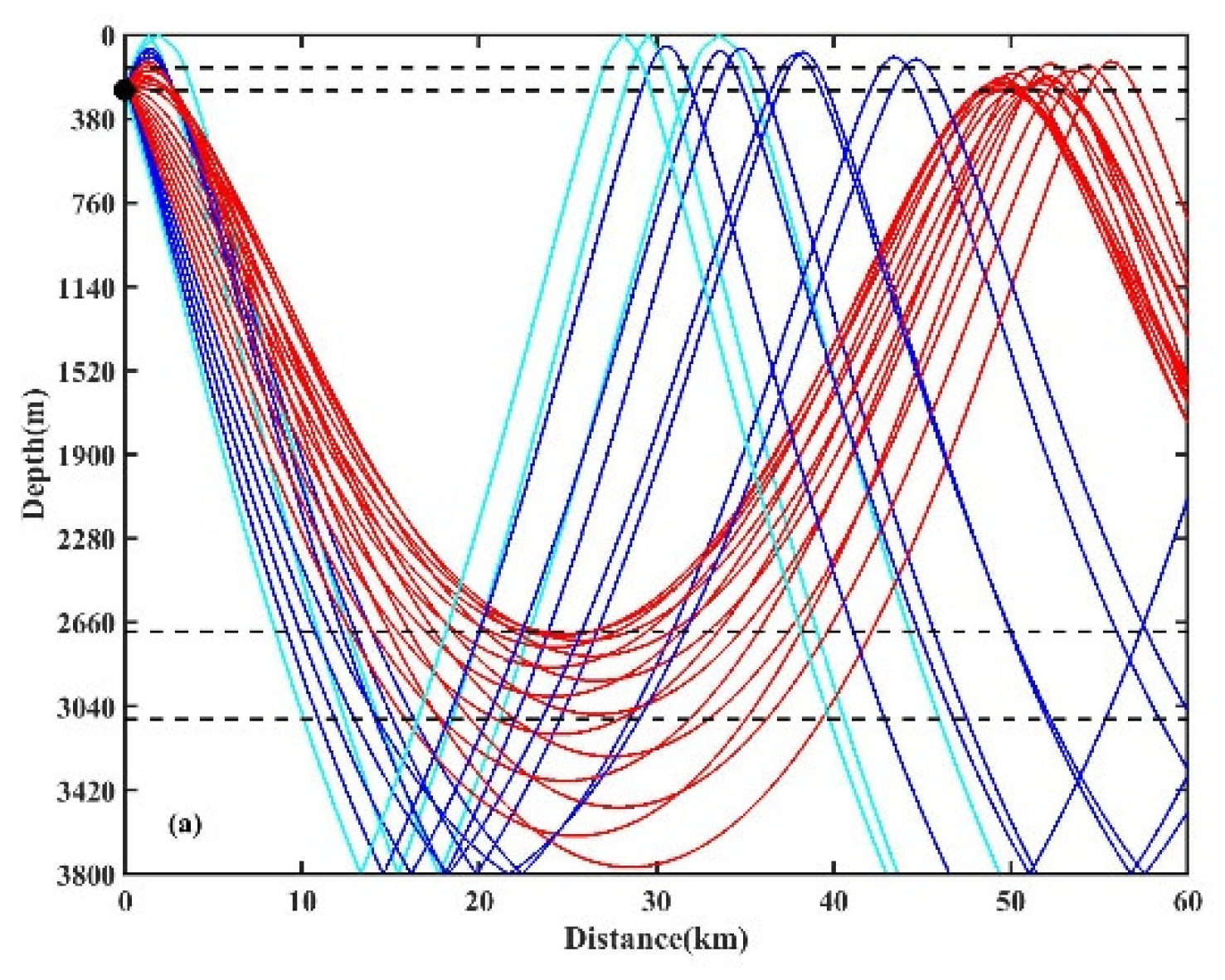
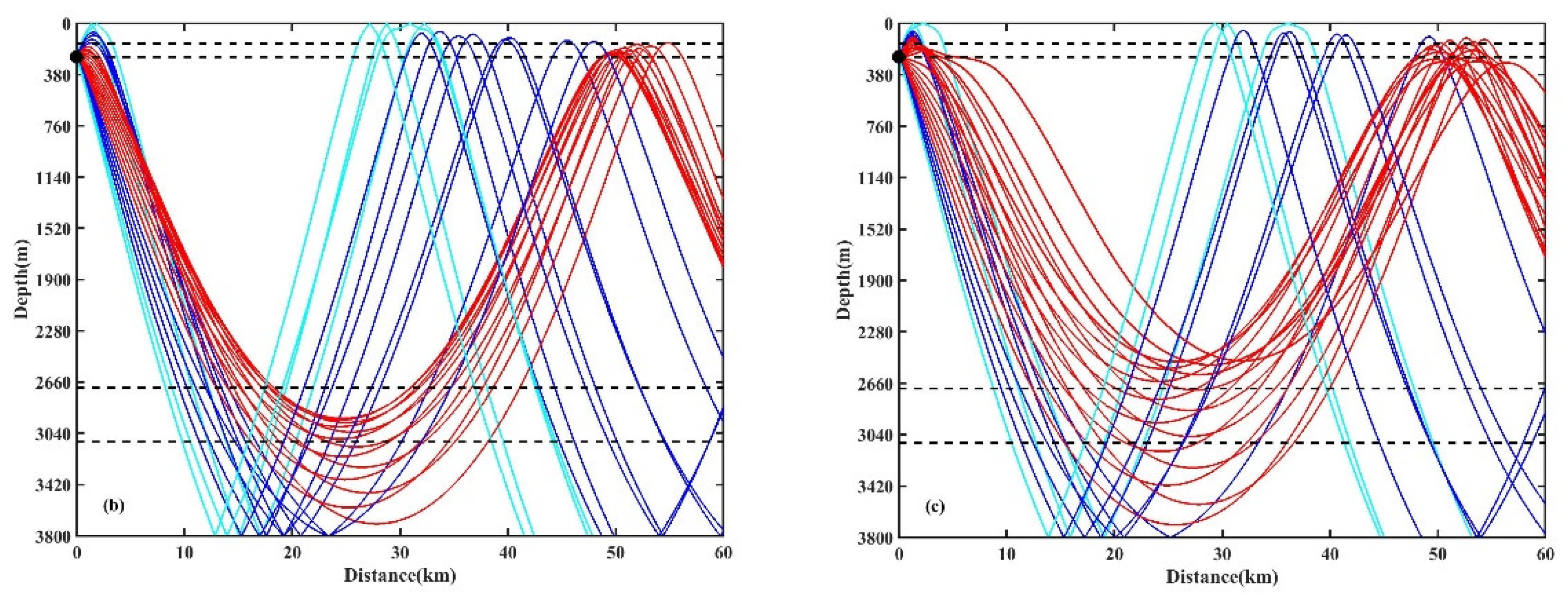
3. Results and Discussion
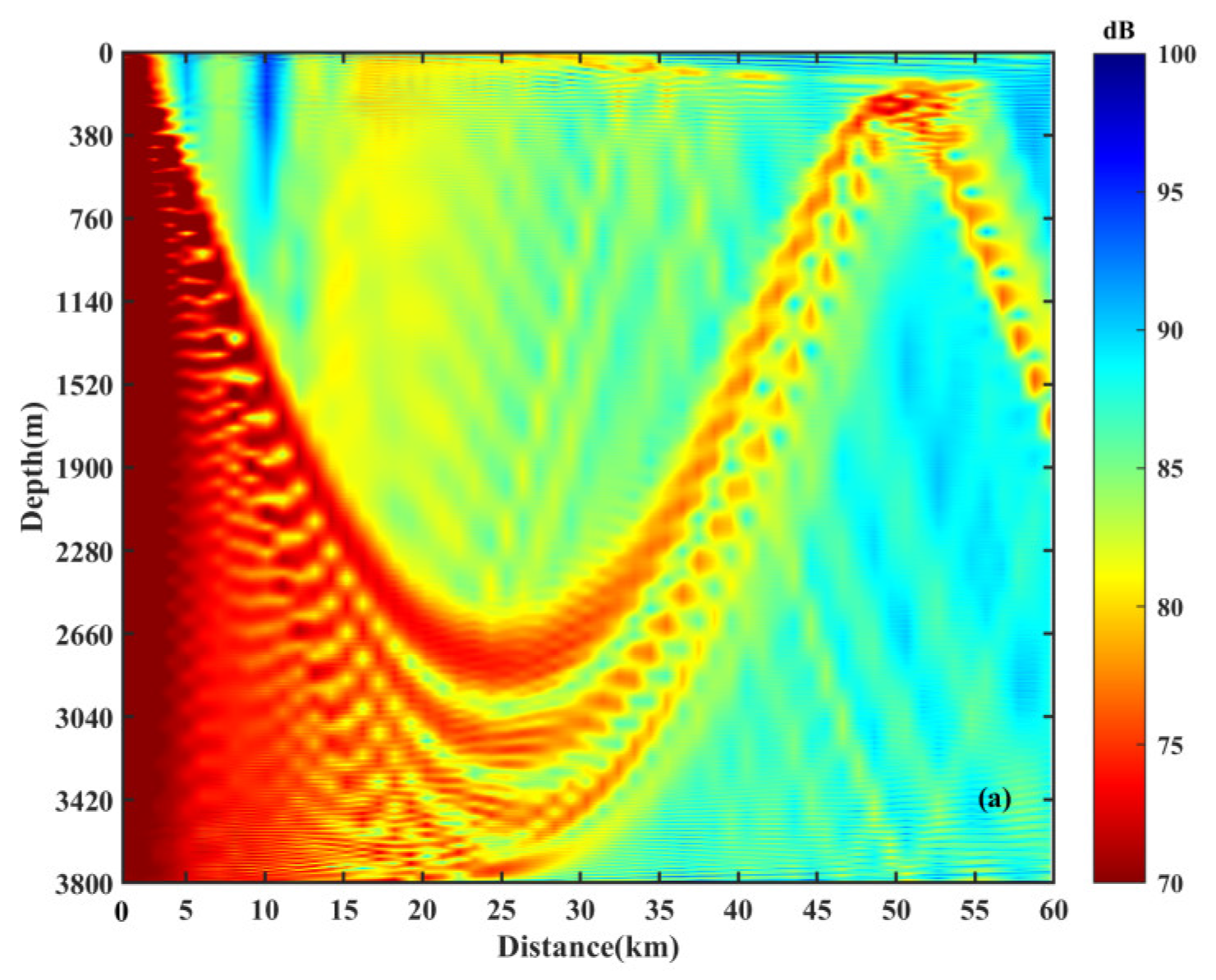
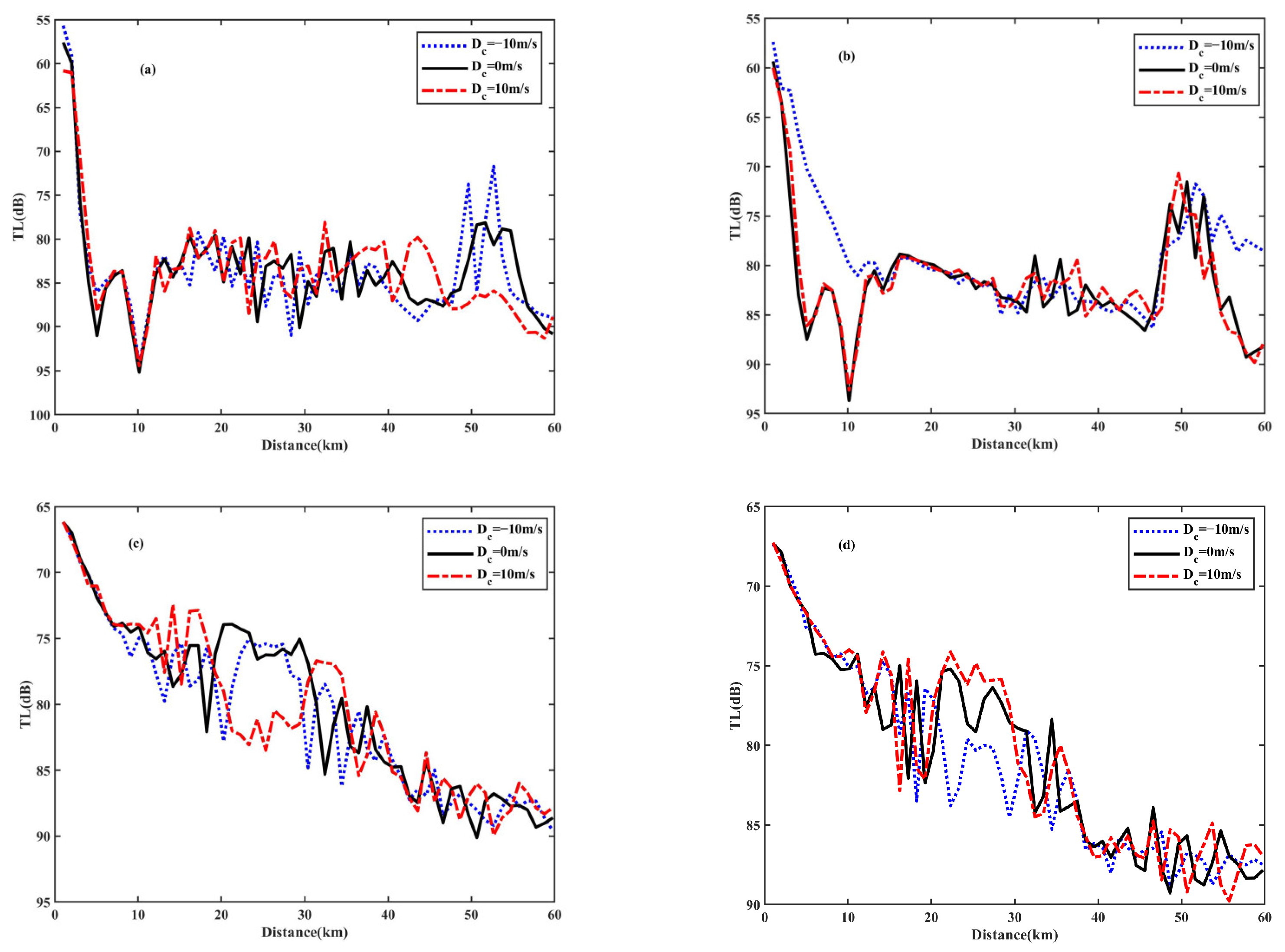
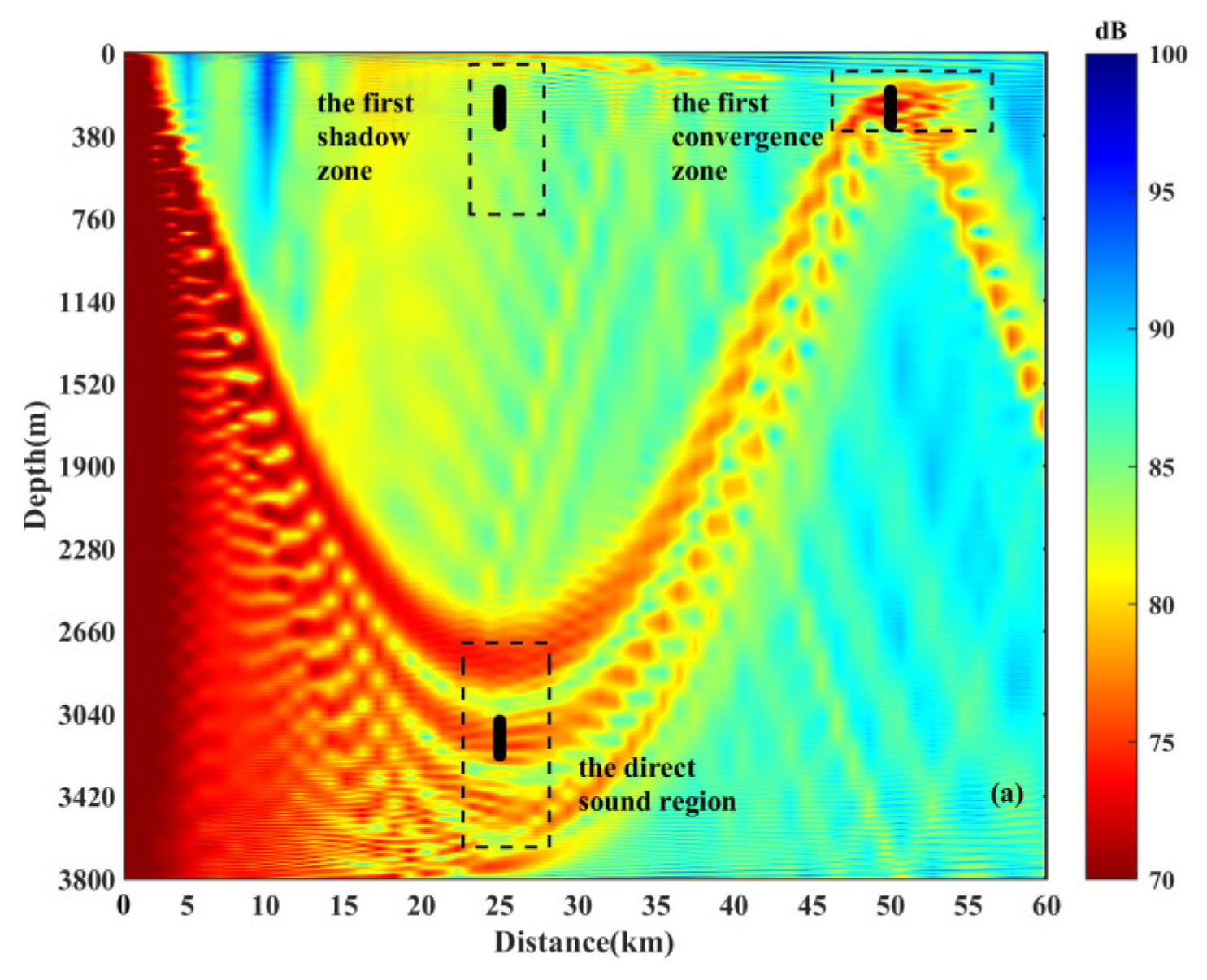
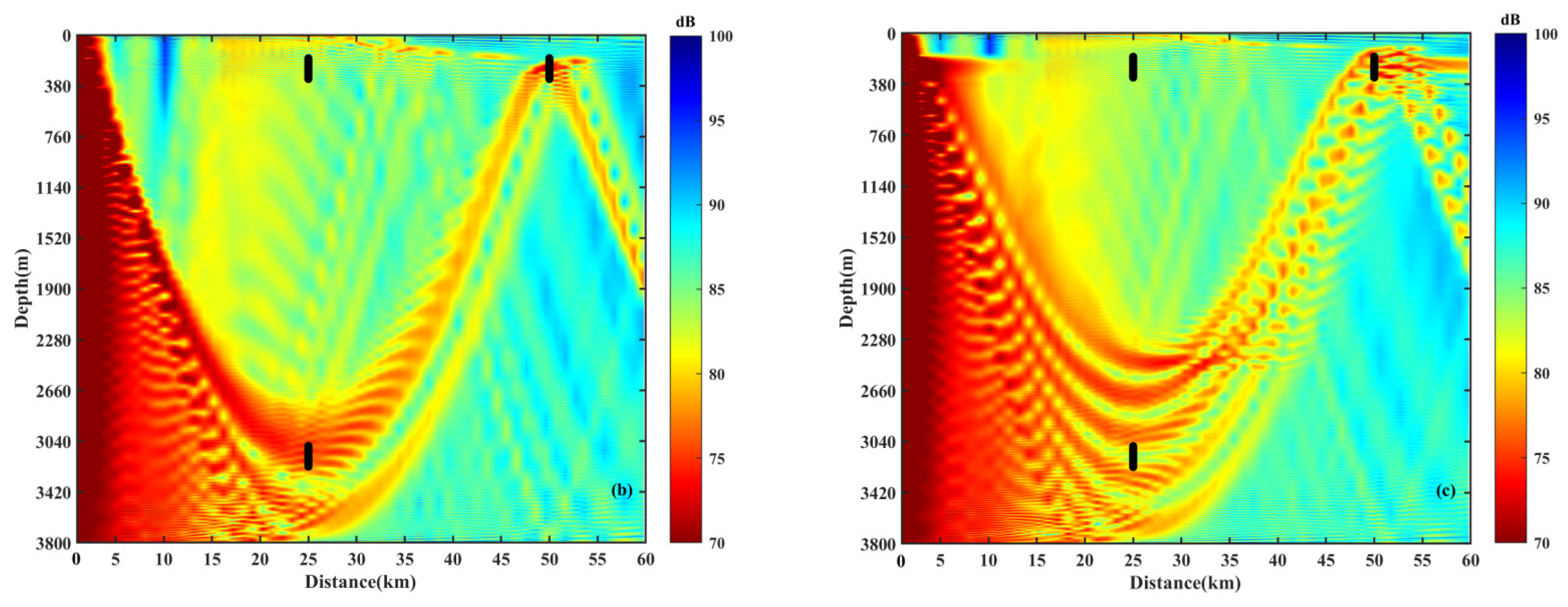
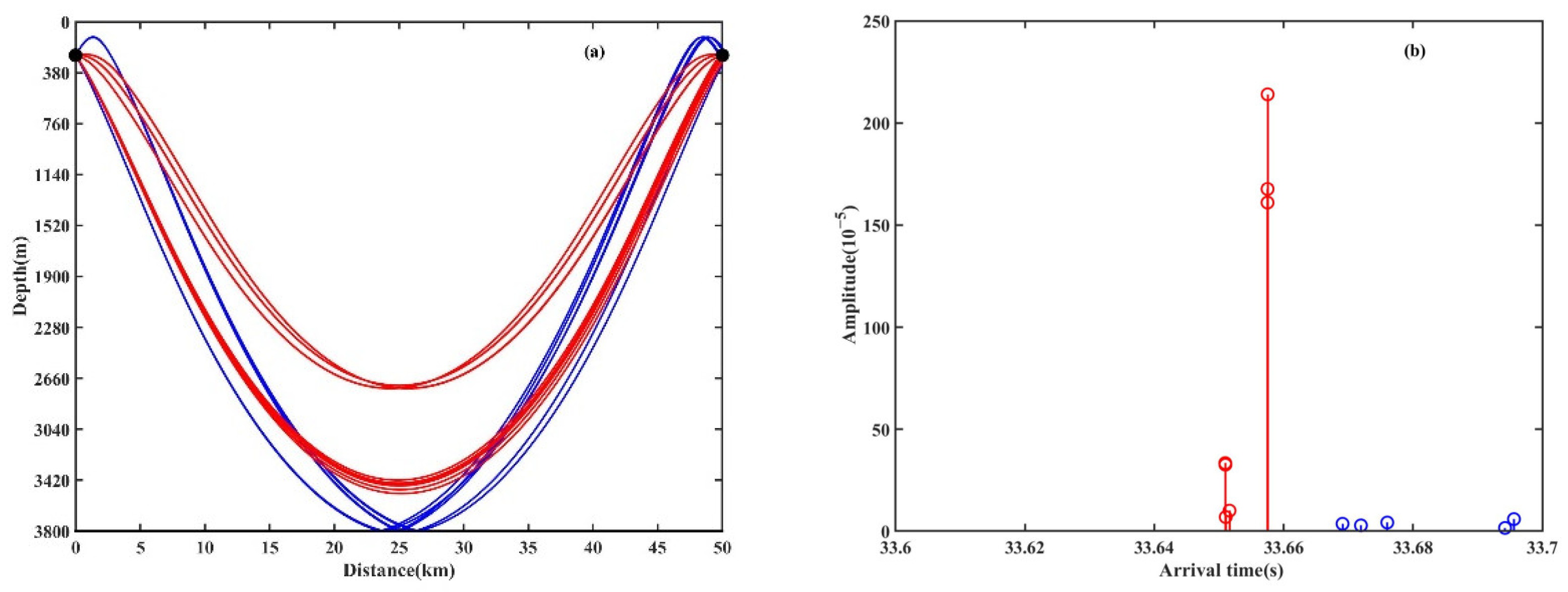
3.1. Transmission Loss Disturbance Analysis
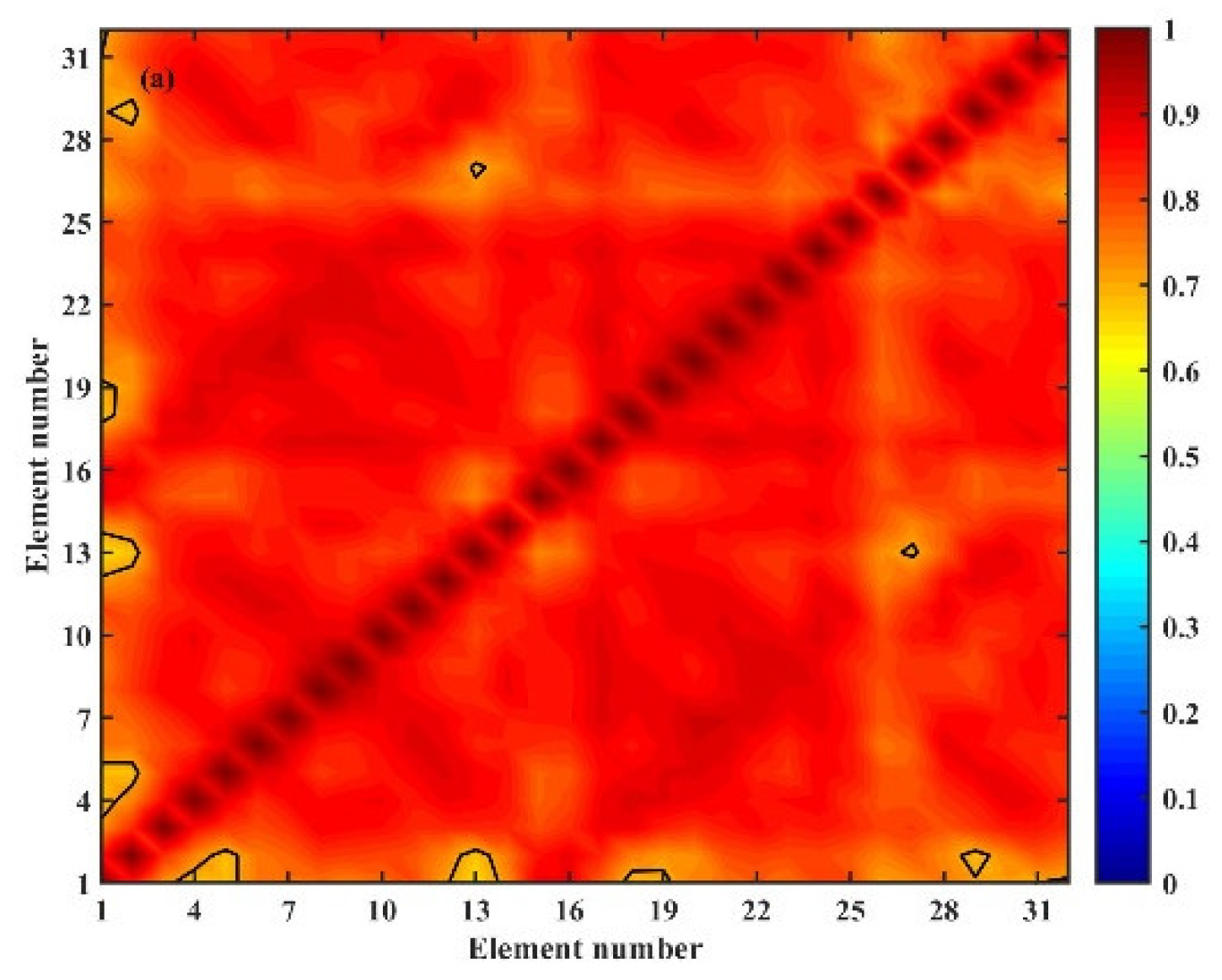
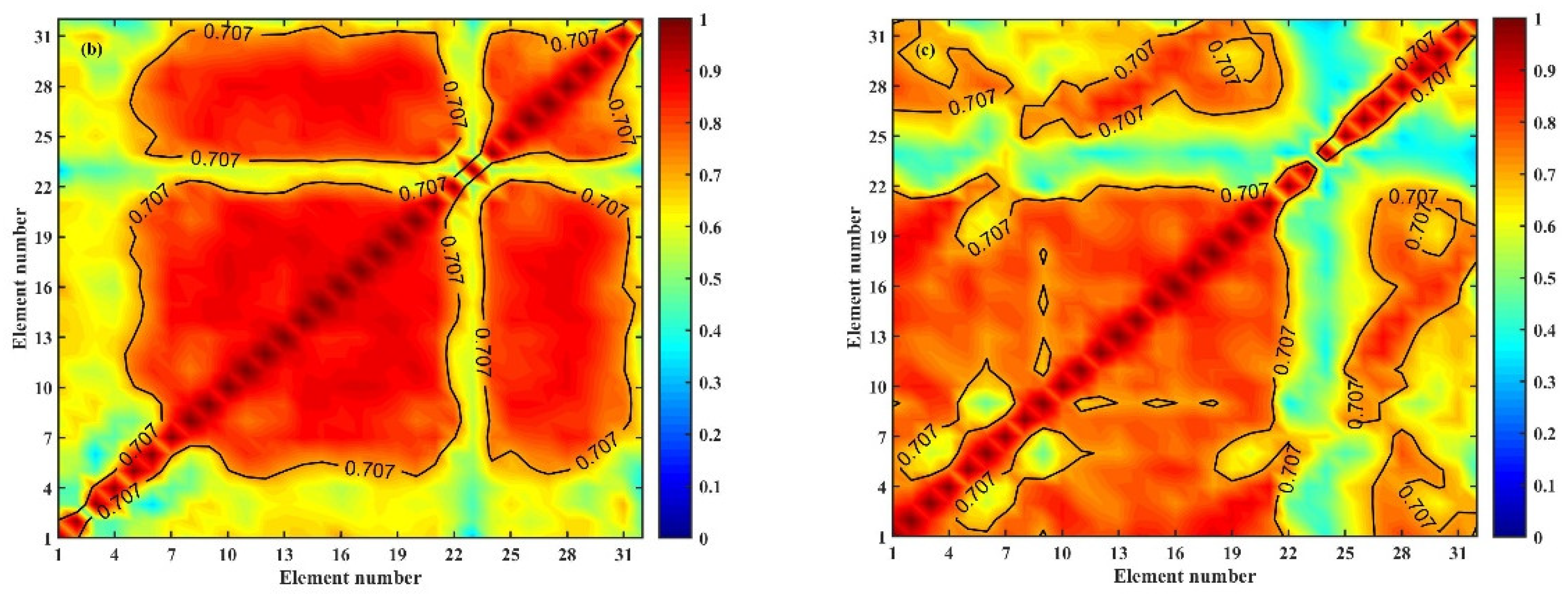
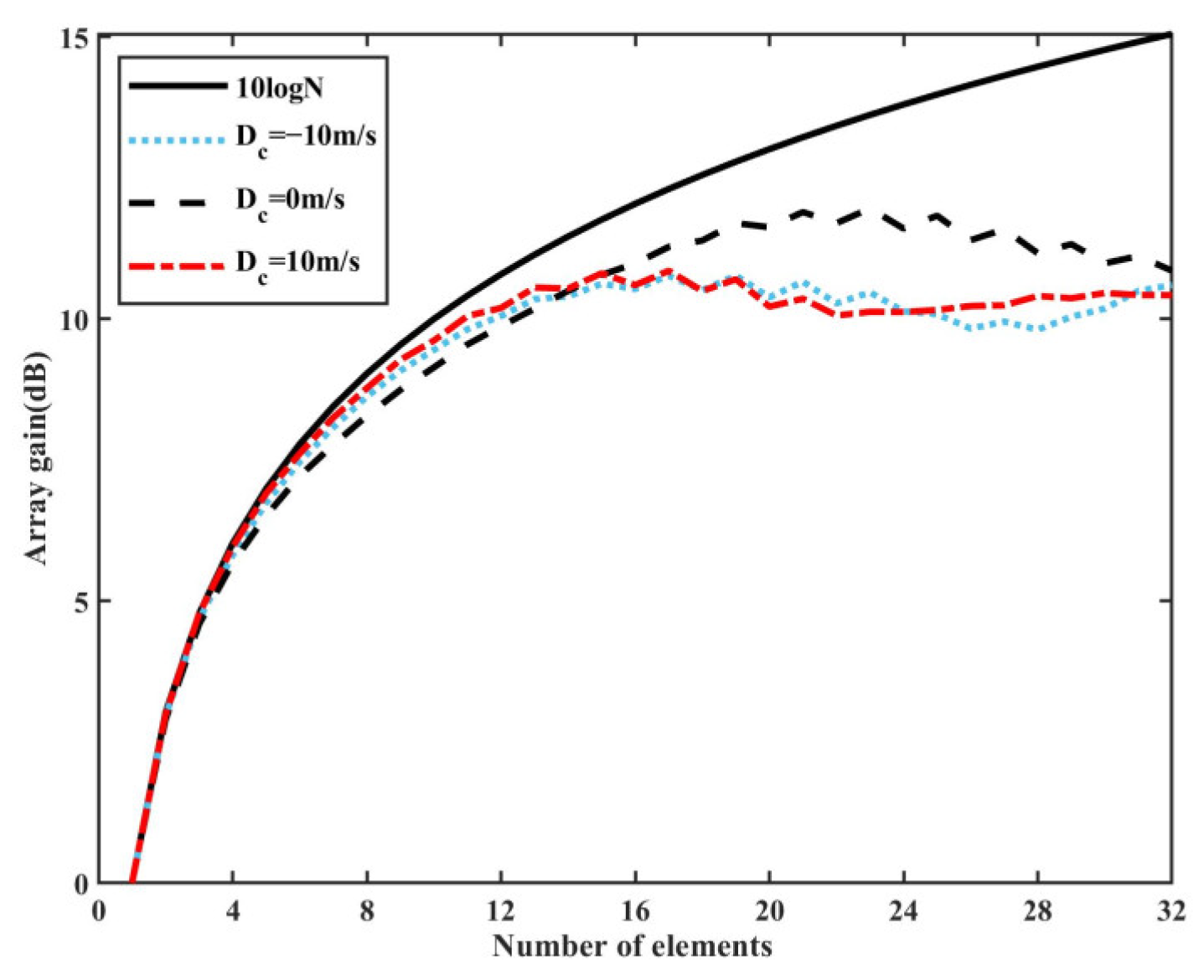
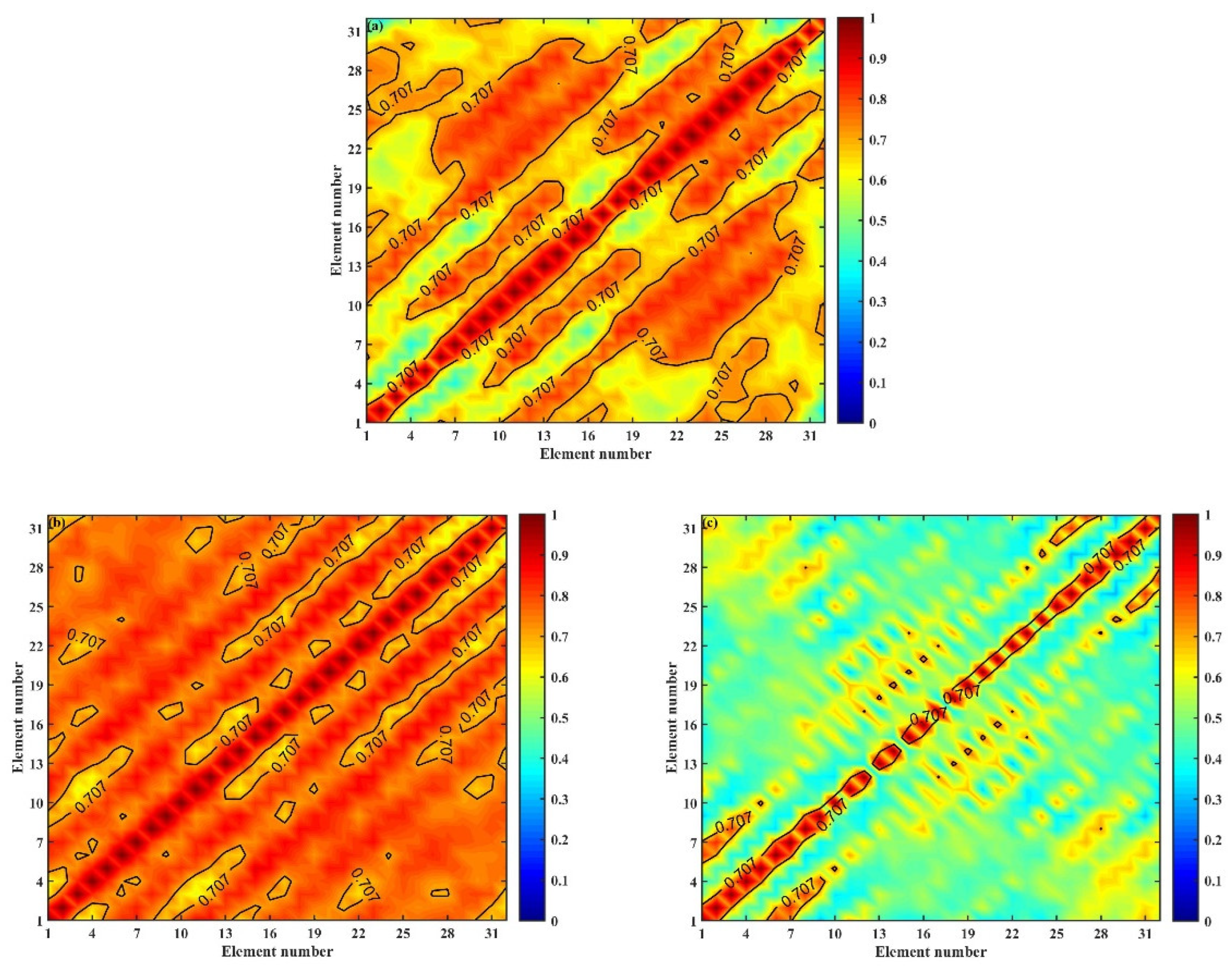
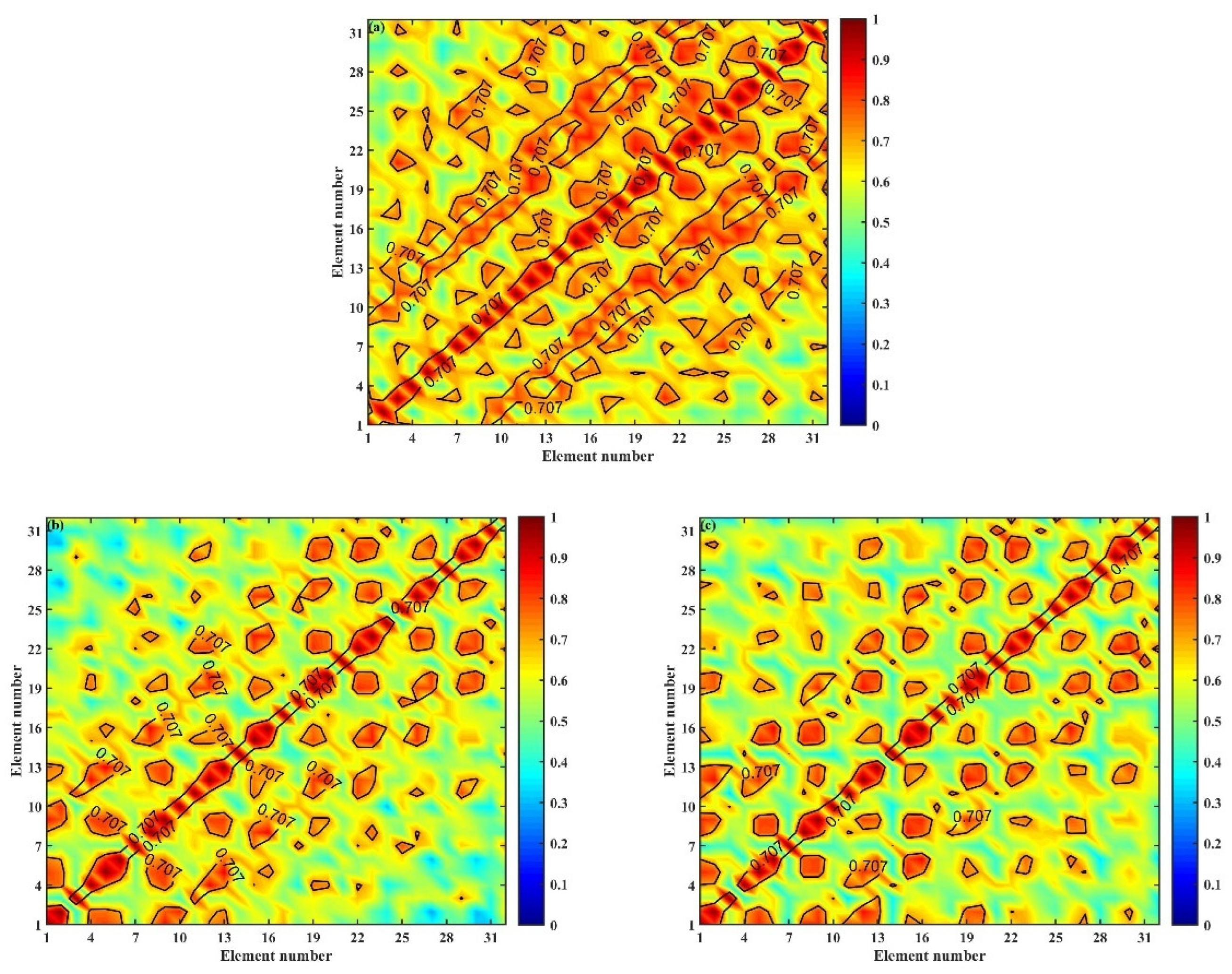
3.2. Effect on Vertical Correlation and Array Gain
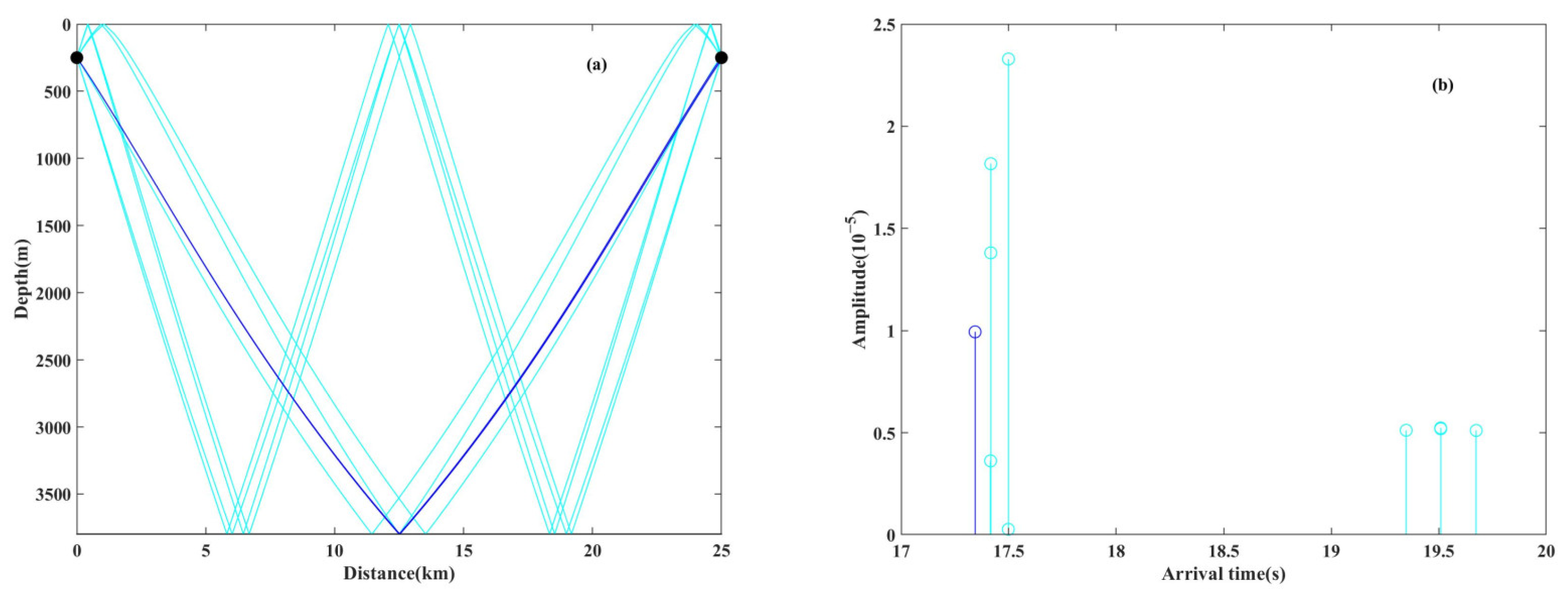
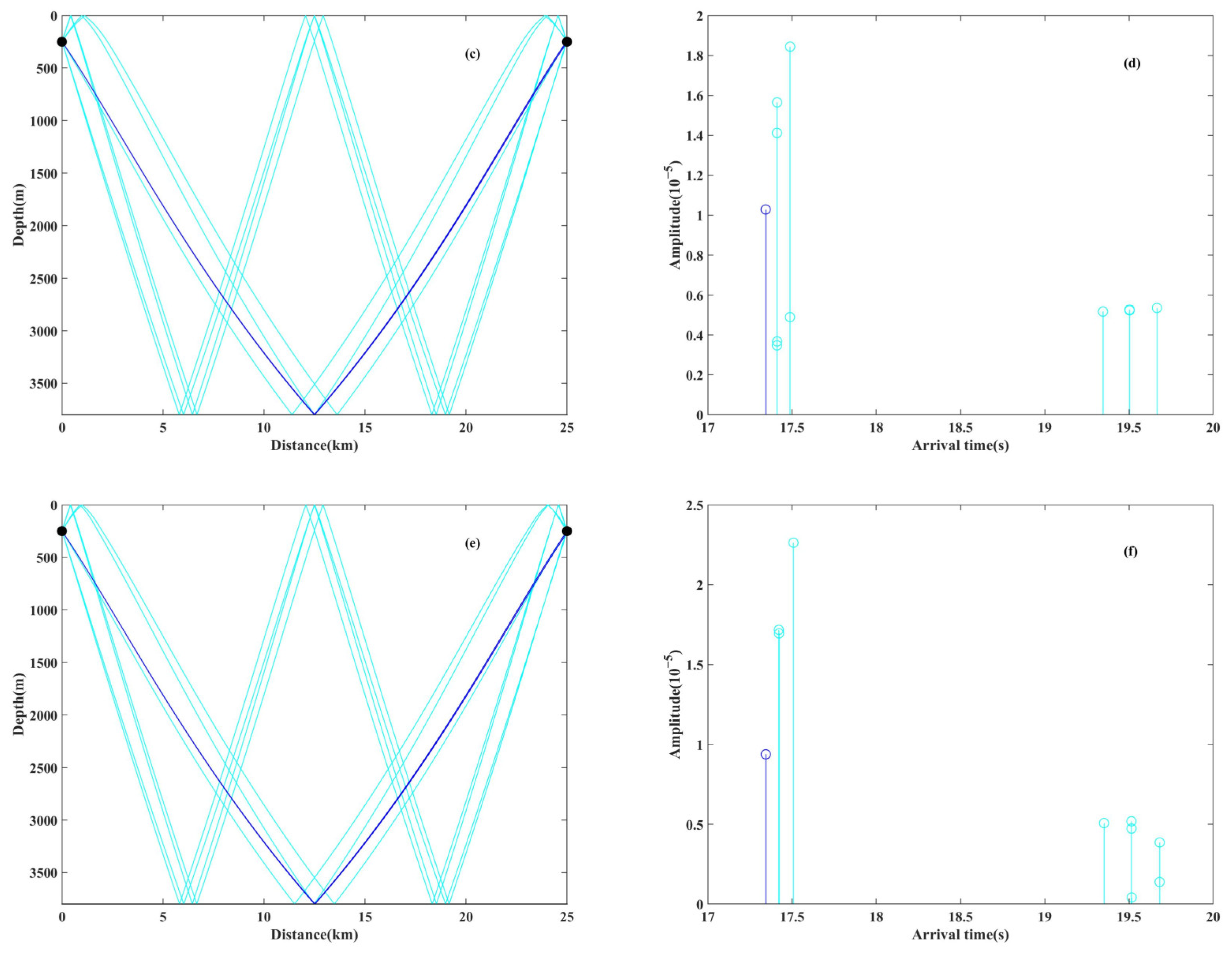
3.2.1. The First Convergence Zone
3.2.2. The Direct Sound Region
3.2.3. The First Shadow Zone
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abraham, D.A. Underwater Acoustic Signal Processing: Modeling, Detection, and Estimation; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Sun, D.J.; Zheng, C.E.; Zhang, J.C.; Han, Y.F.; Cui, H.Y. Development and prospect for underwater acoustic positioning and navigation technology. Chin. Acad. Sci. 2019, 34, 331–338. [Google Scholar] [CrossRef]
- Colosi, J.A.; Chandrayadula, T.K.; Voronovich, A.G.; Ostashev, V.E. Coupled mode transport theory for sound transmission through an ocean with random sound speed perturbations: Coherence in deep water environments. J. Acoust. Soc. Am. 2013, 134, 3119–3133. [Google Scholar] [CrossRef] [PubMed]
- Dong, F.C.; Hu, Z.G.; Li, Z.L. Effects of uneven bottom on vertical correlation of sound field in the deep water area of the South China Sea. Chin. Acta Acust. 2020, 45, 785–800. [Google Scholar] [CrossRef]
- Hu, Z.G.; Li, Z.L.; Zhang, R.H.; Ren, Y.; Li, J. The effects of the uneven bottom on horizontal longitudinal correlation of acoustic field in the deep water. Chin. Acta Acust. 2016, 41, 758–767. [Google Scholar] [CrossRef]
- Cox, H. Line array performance when the signal coherence is spatially dependent. J. Acoust. Soc. Am. 1973, 54, 1743–1746. [Google Scholar] [CrossRef]
- Carey, W.; Reese, J.; Bucker, H. Environmental acoustic influences on array beam response. J. Acoust. Soc. Am. 1998, 104, 133–140. [Google Scholar] [CrossRef]
- Morgan, D.R.; Smith, T.M. Coherence effects on the detection performance of quadratic array processors, with applications to large-array matched-field beamforming. J. Acoust. Soc. Am. 1990, 87, 737–747. [Google Scholar] [CrossRef]
- Zavol’skii, N.; Malekhanov, A.; Raevskii, M.; Smirnov, A. Effects of wind waves on horizontal array performance in shallow-water conditions. Acoust. Phys. 2017, 63, 542–552. [Google Scholar] [CrossRef]
- Xie, L.; Sun, C.; Liu, X.H.; Jiang, G.Y. Array gain of conventional beamformer affected by structure of acoustic field in continental slope area. Acta Phys. Sin. 2016, 65, 171–181. [Google Scholar] [CrossRef]
- Urick, R. Measurements of the vertical coherence of the sound from a near-surface source in the sea and the effect on the gain of an additive vertical array. J. Acoust. Soc. Am. 1973, 54, 115–120. [Google Scholar] [CrossRef]
- Dong, F.; Li, Z.; Hu, Z.; Wu, S. The Effects of Vertical Correlation Characteristics on Vertical Array Gain Performance in Deep Water. IEEE J. Ocean. Eng. 2022, 47, 751–766. [Google Scholar] [CrossRef]
- Smith, G.C.; Fortin, A.-S. Verification of eddy properties in operational oceanographic analysis systems. Ocean. Model. 2022, 172, 101982. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, Y.C.; Liu, Y.Y.; Ma, L.N.; Wang, H.D.; Ren, K.J.; Chen, S.Y. Parametric Model for Eddies-Induced Sound Speed Anomaly in Five Active Mesoscale Eddy Regions. J. Geophys. Res. Oceans. 2022, 127, 018408. [Google Scholar] [CrossRef]
- Evans, D.G.; Frajka Williams, E.; Naveira Garabato, A.C.; Polzin, K.L.; Forryan, A. Mesoscale eddy dissipation by a ‘Zoo’ of submesoscale processes at a western boundary. J. Geophys. Res. Oceans 2020, 125, 016246. [Google Scholar] [CrossRef]
- Liu, J.Q.; Piao, S.C.; Gong, L.J.; Zhang, M.H.; Guo, Y.C.; Zhang, S.Z. The Effect of Mesoscale Eddy on the Characteristic of Sound Propagation. J. Mar. Sci. Eng. 2021, 9, 787. [Google Scholar] [CrossRef]
- Heaney, K.D.; Campbell, R.L. Three-dimensional parabolic equation modeling of mesoscale eddy deflection. J. Acoust. Soc. Am 2016, 139, 918–926. [Google Scholar] [CrossRef]
- Xiao, Y.; Li, Z.; Li, J.; Liu, J.; Sabra, K.G. Influence of warm eddies on sound propagation in the Gulf of Mexico. Chin. Phys. B 2019, 28, 054301. [Google Scholar] [CrossRef]
- Gao, F.; Xu, F.H.; Li, Z.L. The Effects of Mesoscale Eddies on Spatial Coherence of Middle Range Sound Field in Deep Water. Chin. Phys. B 2022, 11, 114302. [Google Scholar] [CrossRef]
- Hassantabar Bozroudi, S.H.; Ciani, D.; Mohammad Mahdizadeh, M.; Akbarinasab, M.; Aguiar, A.C.B.; Peliz, A.; Chapron, B.; Fablet, R.; Carton, X. Effect of Subsurface Mediterranean Water Eddies on Sound Propagation Using ROMS Output and the Bellhop Model. Water 2021, 13, 3617. [Google Scholar] [CrossRef]
- Khan, S.; Song, Y.; Huang, J.; Piao, S. Analysis of Underwater Acoustic Propagation under the Influence of Mesoscale Ocean Vortices. J. Mar. Sci. Eng. 2021, 9, 799. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, J.; Jin, K.; Feng, R.; Xu, L.; Chen, L.; Chen, D.; Qiao, J. A FEM Flow Impact Acoustic Model Applied to Rapid Computation of Ocean-Acoustic Remote Sensing in Mesoscale Eddy Seas. Remote Sens. 2024, 16, 326. [Google Scholar] [CrossRef]
- Della Penna, A.; Gaube, P. Mesoscale Eddies Structure Mesopelagic Communities. Front. Mar. Sci. 2020, 7, 454. [Google Scholar] [CrossRef]
- Shang, E.C. Ocean acoustic tomography based on adiabatic mode theory. J. Acoust. Soc. Am. 1989, 85, 1531–1537. [Google Scholar] [CrossRef]
- Zhang, P.; Li, Z.L.; Wu, L.X.; Zhang, R.H.; Qin, J.X. Characteristics of convergence zone formed by bottom reflection in deep water. Acta Phys. Sin. 2019, 68, 174–185. [Google Scholar] [CrossRef]
- Porter, M.B.; Bucker, H.P. Gaussian beam tracing for computing ocean acoustic fields. J. Acoust. Soc. Am. 1987, 82, 1349–1359. [Google Scholar] [CrossRef]
- Collins, M.D. A split-step Padé solution for the parabolic equation method. J. Acoust. Soc. Am. 1993, 93, 1736–1742. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Qin, J.; Wu, S.; Li, Z.; Wang, M.; Gu, Y.; Wang, Y. Mesoscale Eddy Effects on Vertical Correlation of Sound Field and Array Gain Performance. Remote Sens. 2024, 16, 1862. https://doi.org/10.3390/rs16111862
Wu Y, Qin J, Wu S, Li Z, Wang M, Gu Y, Wang Y. Mesoscale Eddy Effects on Vertical Correlation of Sound Field and Array Gain Performance. Remote Sensing. 2024; 16(11):1862. https://doi.org/10.3390/rs16111862
Chicago/Turabian StyleWu, Yushen, Jixing Qin, Shuanglin Wu, Zhenglin Li, Mengyuan Wang, Yiming Gu, and Yang Wang. 2024. "Mesoscale Eddy Effects on Vertical Correlation of Sound Field and Array Gain Performance" Remote Sensing 16, no. 11: 1862. https://doi.org/10.3390/rs16111862
APA StyleWu, Y., Qin, J., Wu, S., Li, Z., Wang, M., Gu, Y., & Wang, Y. (2024). Mesoscale Eddy Effects on Vertical Correlation of Sound Field and Array Gain Performance. Remote Sensing, 16(11), 1862. https://doi.org/10.3390/rs16111862