




A Machine-Learning-Based Framework for Retrieving Water Quality Parameters in Urban Rivers Using UAV Hyperspectral Images



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
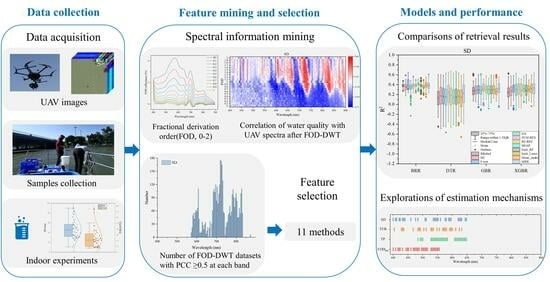
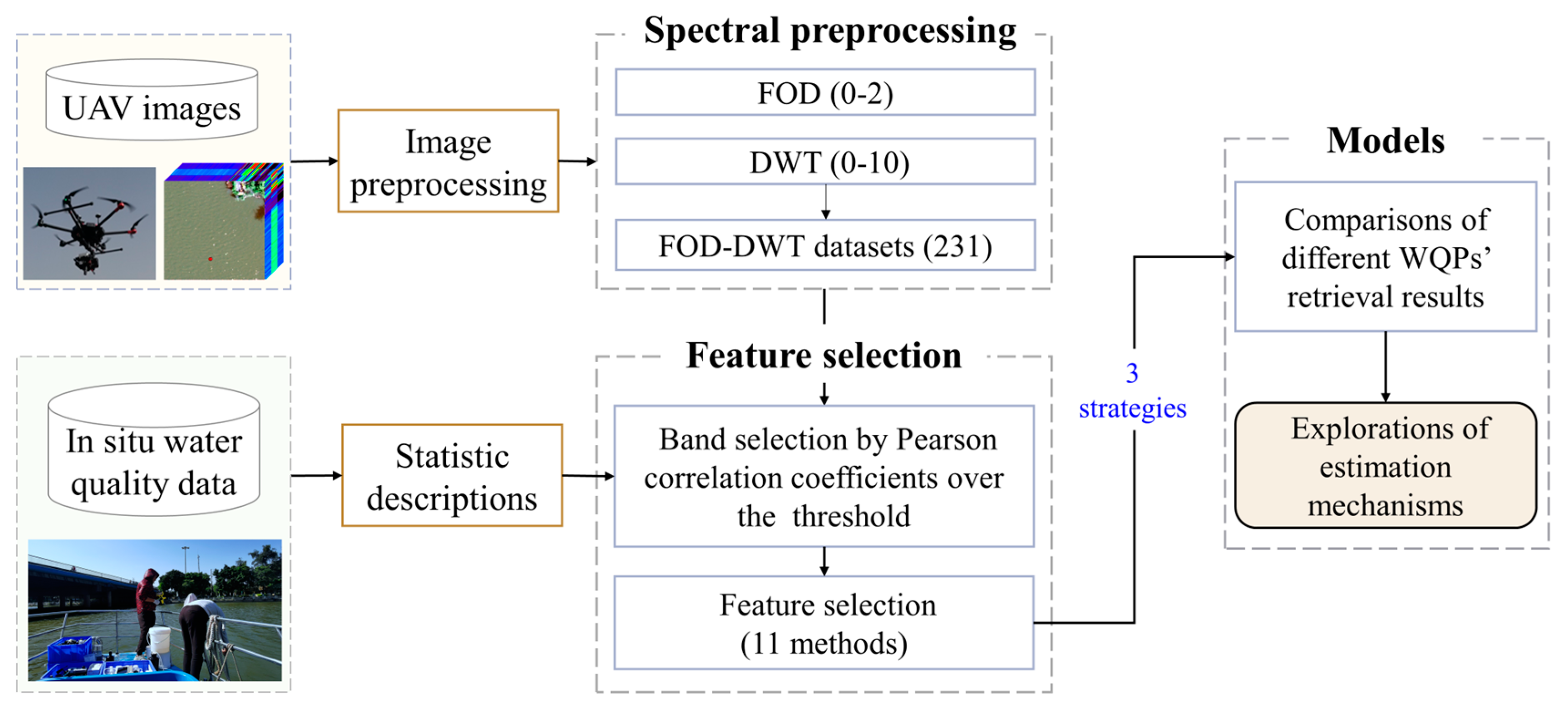
2.2. Research Framework
2.3. Data Acquisition
2.3.1. Water Quality Data Sampling
2.3.2. UAV Acquisition and Processing
2.4. Spectral Preprocessing
2.4.1. Fractional Order Derivation
2.4.2. Discrete Wavelet Transform
2.5. Feature Selection Methods
2.6. Modeling of WQP Inversion
2.7. Accuracy Evaluation
3. Results
3.1. Descriptive Characteristics
3.1.1. Descriptive Characteristics
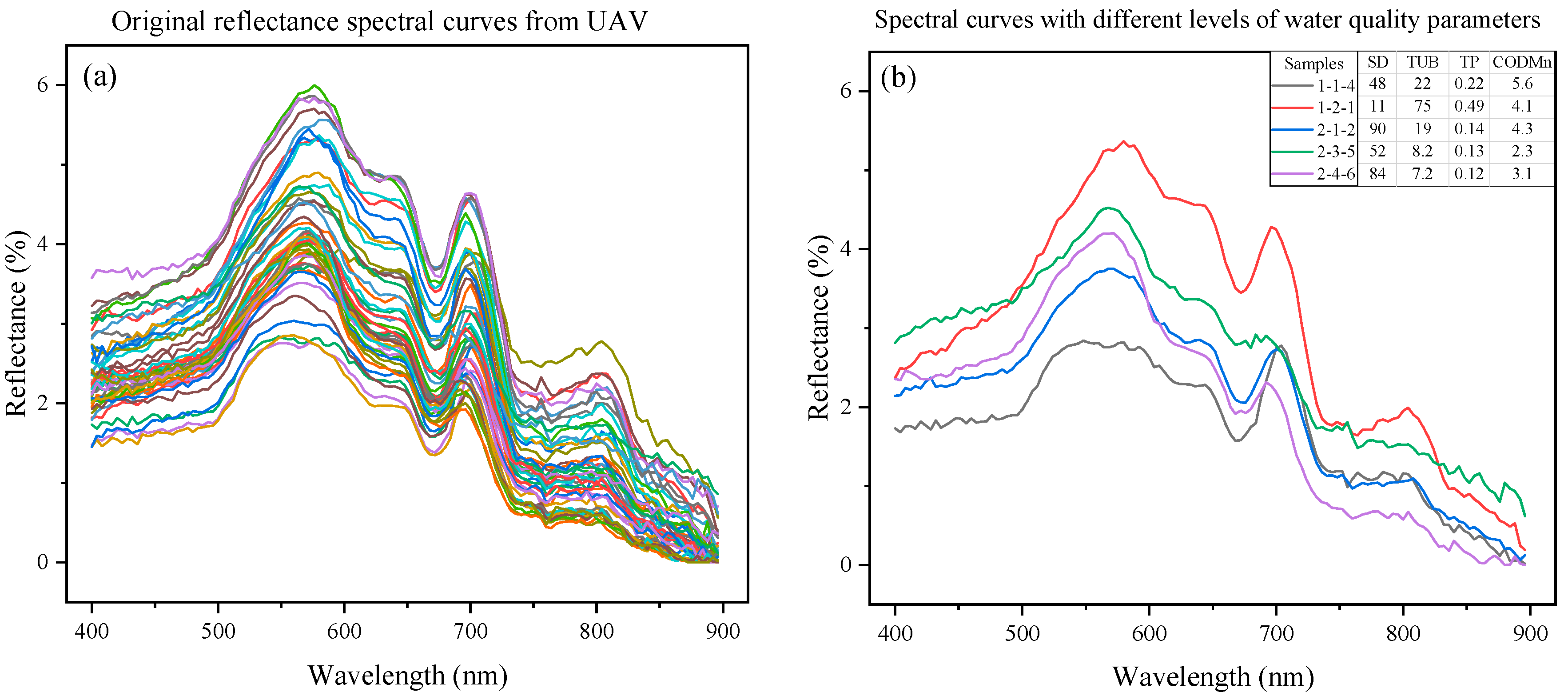
3.1.2. Spectral Characteristics
3.2. Features of Preprocessed Spectra
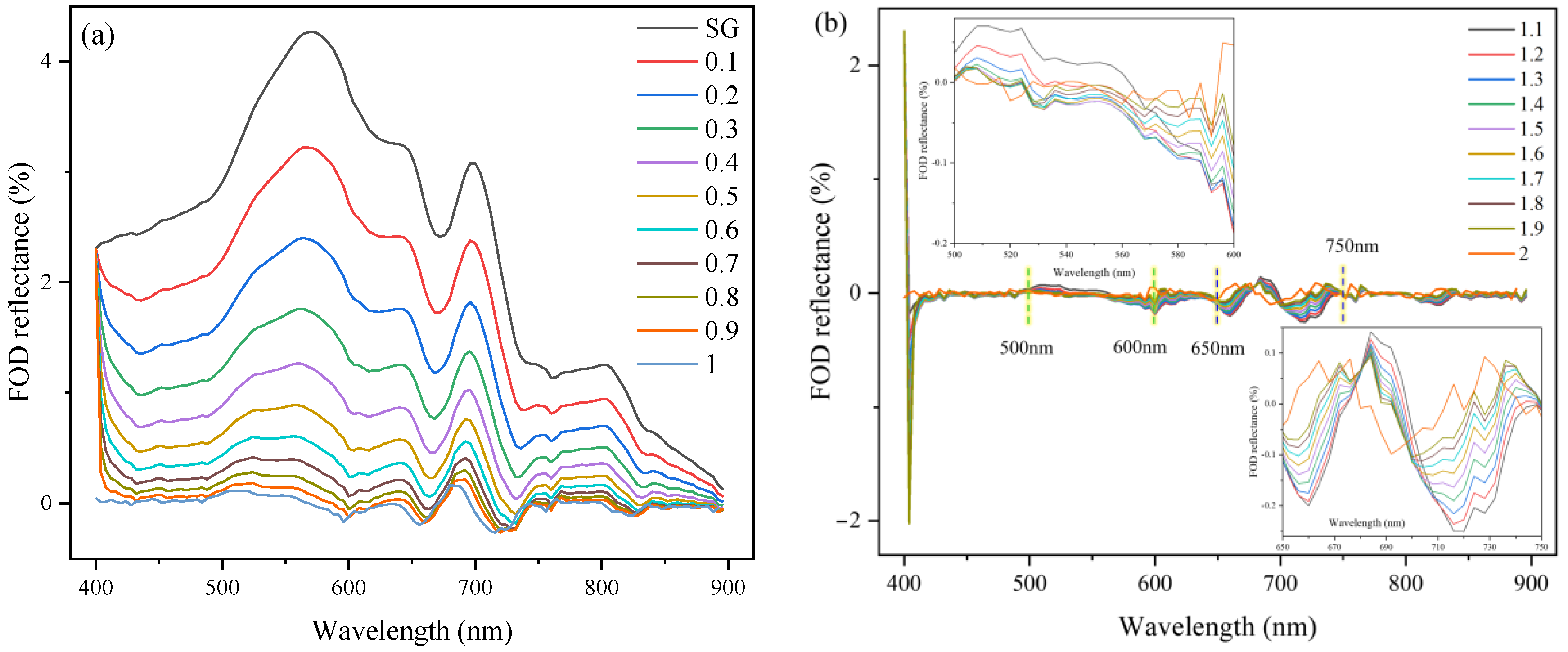
3.2.1. Spectral Features with FOD
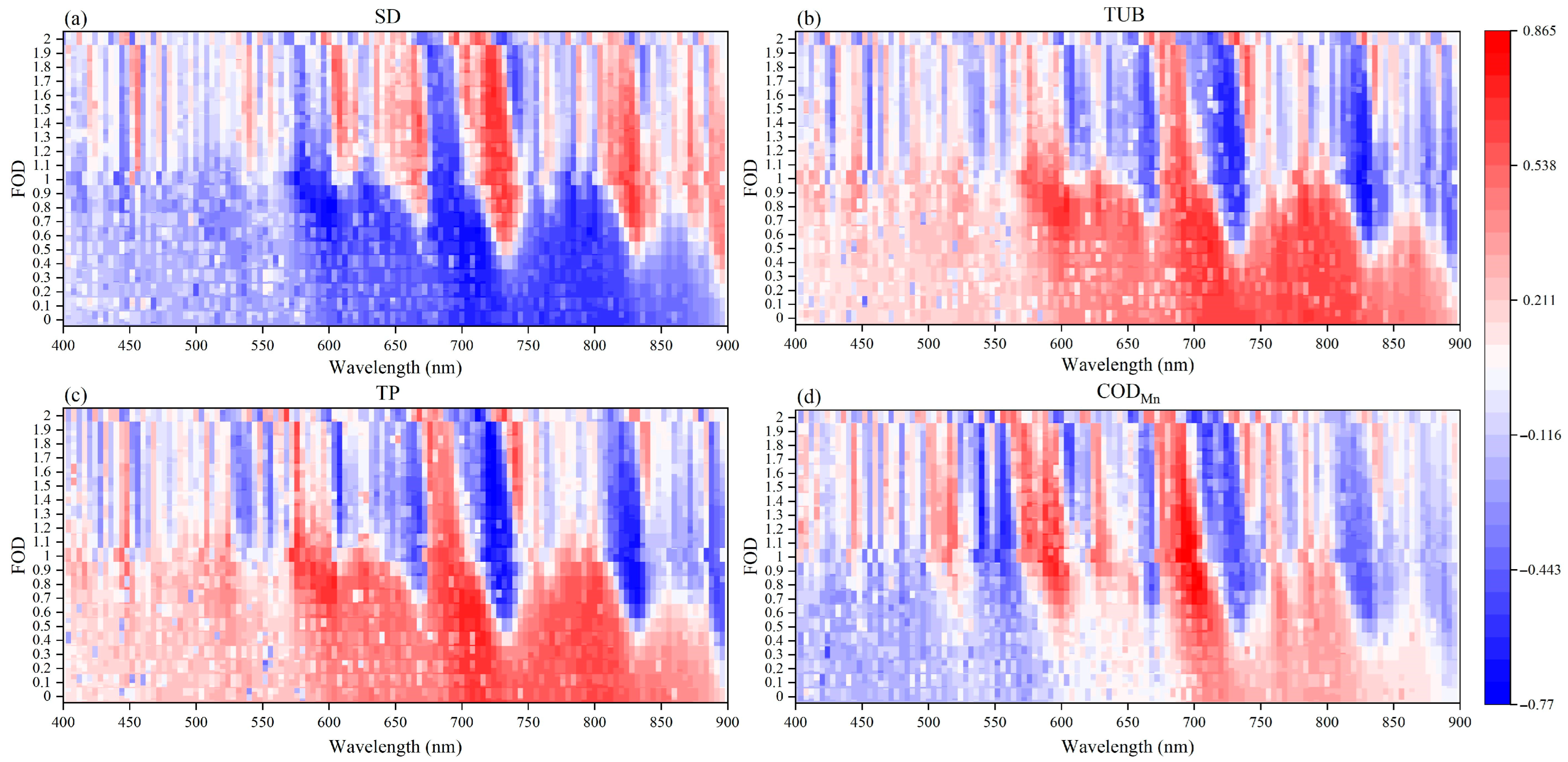
3.2.2. Correlation Analysis between WQPs and Preprocessed Spectra
3.3. Regression Results
3.3.1. Comparisons of Different Strategies
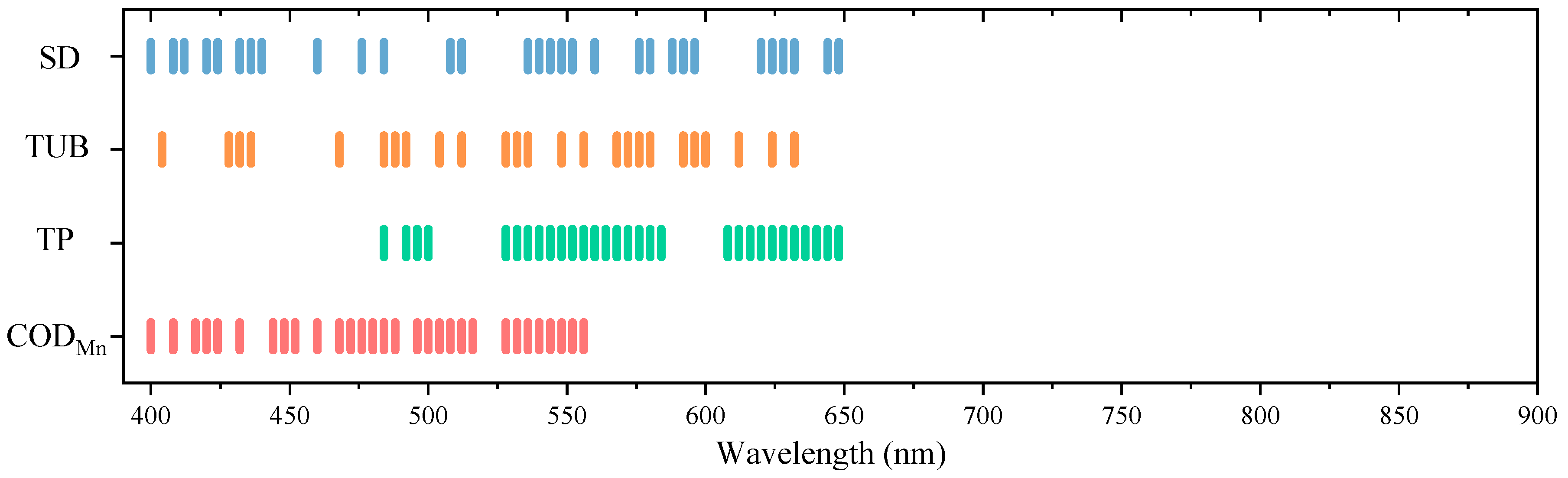
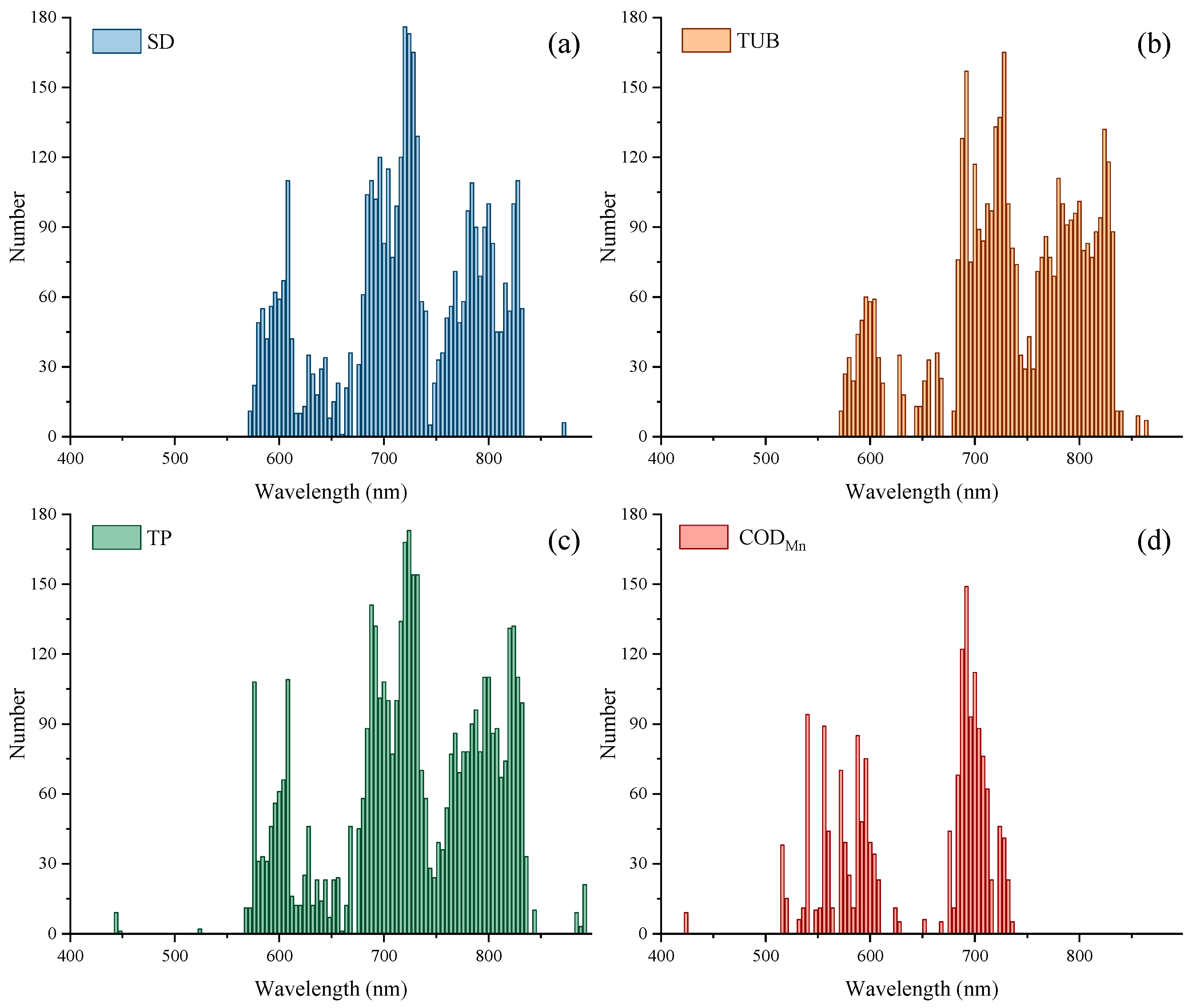
3.3.2. Sensitive Spectral Bands of WQPs
4. Discussion
4.1. Analysis of Regression Performance
4.2. Exploration of WQP Estimation Mechanisms
4.3. Implications and Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Giri, S. Water quality prospective in Twenty First Century: Status of water quality in major river basins, contemporary strategies and impediments: A review. Environ. Pollut. 2021, 271, 116332. [Google Scholar] [CrossRef]
- Wang, S.; Shen, M.; Liu, W.; Ma, Y.; Shi, H.; Zhang, J.; Liu, D. Developing remote sensing methods for monitoring water quality of alpine rivers on the Tibetan Plateau. GISci. Remote Sens. 2022, 59, 1384–1405. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, K.; Sun, X.; Zhang, Y.; Li, N.; Wang, W.; Zhou, Y.; Zhi, W.; Liu, M.; Li, Y.; et al. Improving remote sensing estimation of Secchi disk depth for global lakes and reservoirs using machine learning methods. GISci. Remote Sens. 2022, 59, 1367–1383. [Google Scholar] [CrossRef]
- Jia, M.; Li, F.; Zhang, Y.; Wu, M.; Li, Y.; Feng, S.; Wang, H.; Chen, H.; Ju, W.; Lin, J.; et al. The Nord Stream pipeline gas leaks released approximately 220,000 tonnes of methane into the atmosphere. Environ. Sci. Ecotechnol. 2022, 12, 100210. [Google Scholar] [CrossRef]
- Cillero Castro, C.; Domínguez Gómez, J.A.; Delgado Martín, J.; Hinojo Sánchez, B.A.; Cereijo Arango, J.L.; Cheda Tuya, F.A.; Díaz-Varela, R. An UAV and Satellite Multispectral Data Approach to Monitor Water Quality in Small Reservoirs. Remote Sens. 2020, 12, 1514. [Google Scholar] [CrossRef]
- Cai, J.; Meng, L.; Liu, H.; Chen, J.; Xing, Q. Estimating Chemical Oxygen Demand in estuarine urban rivers using unmanned aerial vehicle hyperspectral images. Ecol. Indic. 2022, 139, 108936. [Google Scholar] [CrossRef]
- Zhou, X.; Liu, C.; Akbar, A.; Xue, Y.; Zhou, Y. Spectral and Spatial Feature Integrated Ensemble Learning Method for Grading Urban River Network Water Quality. Remote Sens. 2021, 13, 4591. [Google Scholar] [CrossRef]
- Wang, J.; Shi, T.; Yu, D.; Teng, D.; Ge, X.; Zhang, Z.; Yang, X.; Wang, H.; Wu, G. Ensemble machine-learning-based framework for estimating total nitrogen concentration in water using drone-borne hyperspectral imagery of emergent plants: A case study in an arid oasis, NW China. Environ. Pollut. 2020, 266, 115412. [Google Scholar] [CrossRef]
- Giles, A.B.; Correa, R.E.; Santos, I.R.; Kelaher, B. Using multispectral drones to predict water quality in a subtropical estuary. Environ. Technol. 2024, 45, 1300–1312. [Google Scholar] [CrossRef]
- Zhao, C.; Li, M.; Wang, X.; Liu, B.; Pan, X.; Fang, H. Improving the accuracy of nonpoint-source pollution estimates in inland waters with coupled satellite-UAV data. Water Res. 2022, 225, 119208. [Google Scholar] [CrossRef]
- Cheng, Q.; Xu, H.; Fei, S.; Li, Z.; Chen, Z. Estimation of Maize LAI Using Ensemble Learning and UAV Multispectral Imagery under Different Water and Fertilizer Treatments. Agriculture 2022, 12, 1267. [Google Scholar] [CrossRef]
- Bussières, S.; Kinnard, C.; Clermont, M.; Campeau, S.; Dubé-Richard, D.; Bordeleau, P.-A.; Roy, A. Monitoring Water Turbidity in a Temperate Floodplain Using UAV: Potential and Challenges. Can. J. Remote Sens. 2022, 48, 565–574. [Google Scholar] [CrossRef]
- Khan, M.J.; Khan, H.S.; Yousaf, A.; Khurshid, K.; Abbas, A. Modern Trends in Hyperspectral Image Analysis: A Review. IEEE Access 2018, 6, 14118–14129. [Google Scholar] [CrossRef]
- Kwon, S.; Seo, I.W.; Noh, H.; Kim, B. Hyperspectral retrievals of suspended sediment using cluster-based machine learning regression in shallow waters. Sci. Total Environ. 2022, 833, 155168. [Google Scholar] [CrossRef]
- Laamrani, A.; Berg, A.A.; Voroney, P.; Feilhauer, H.; Blackburn, L.; March, M.; Dao, P.D.; He, Y.; Martin, R.C. Ensemble Identification of Spectral Bands Related to Soil Organic Carbon Levels over an Agricultural Field in Southern Ontario, Canada. Remote Sens. 2019, 11, 1298. [Google Scholar] [CrossRef]
- Meng, X.; Bao, Y.; Ye, Q.; Liu, H.; Zhang, X.; Tang, H.; Zhang, X. Soil Organic Matter Prediction Model with Satellite Hyperspectral Image Based on Optimized Denoising Method. Remote Sens. 2021, 13, 2273. [Google Scholar] [CrossRef]
- Pullanagari, R.R.; Kereszturi, G.; Yule, I. Integrating Airborne Hyperspectral, Topographic, and Soil Data for Estimating Pasture Quality Using Recursive Feature Elimination with Random Forest Regression. Remote Sens. 2018, 10, 1117. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Z.; Cheng, Q.; Duan, F.; Sui, R.; Huang, X.; Xu, H. UAV-Based Hyperspectral and Ensemble Machine Learning for Predicting Yield in Winter Wheat. Agronomy 2022, 12, 202. [Google Scholar] [CrossRef]
- Harringmeyer, J.P.; Ghosh, N.; Weiser, M.W.; Thompson, D.R.; Simard, M.; Lohrenz, S.E.; Fichot, C.G. A hyperspectral view of the nearshore Mississippi River Delta: Characterizing suspended particles in coastal wetlands using imaging spectroscopy. Remote Sens. Environ. 2024, 301, 113943. [Google Scholar] [CrossRef]
- Stroud, M.K.; Allen, G.H.; Simard, M.; Jensen, D.; Gorr, B.; Selva, D. Optimizing Satellite Mission Requirements to Measure Total Suspended Solids in Rivers. IEEE Trans. Geosci. Remote Sens 2024, 62, 1–9. [Google Scholar] [CrossRef]
- Arango, J.G.; Nairn, R.W. Prediction of Optical and Non-Optical Water Quality Parameters in Oligotrophic and Eutrophic Aquatic Systems Using a Small Unmanned Aerial System. Drones 2020, 4, 1. [Google Scholar] [CrossRef]
- Chen, B.; Mu, X.; Chen, P.; Wang, B.; Choi, J.; Park, H.; Xu, S.; Wu, Y.; Yang, H. Machine learning-based inversion of water quality parameters in typical reach of the urban river by UAV multispectral data. Ecol. Indic. 2021, 133, 108434. [Google Scholar] [CrossRef]
- Liu, J.; Ding, J.; Ge, X.; Wang, J. Evaluation of Total Nitrogen in Water via Airborne Hyperspectral Data: Potential of Fractional Order Discretization Algorithm and Discrete Wavelet Transform Analysis. Remote Sens. 2021, 13, 4643. [Google Scholar] [CrossRef]
- Hu, Y.; Xu, L.; Huang, P.; Luo, X.; Wang, P.; Kang, Z. Reliable Identification of Oolong Tea Species: Nondestructive Testing Classification Based on Fluorescence Hyperspectral Technology and Machine Learning. Agriculture 2021, 11, 1106. [Google Scholar] [CrossRef]
- Hu, W.; Liu, J.; Wang, H.; Miao, D.; Shao, D.; Gu, W. Retrieval of TP Concentration from UAV Multispectral Images Using IOA-ML Models in Small Inland Waterbodies. Remote Sens. 2023, 15, 1250. [Google Scholar] [CrossRef]
- Prati, R.C. Combining feature ranking algorithms through rank aggregation. In Proceedings of the 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Prior, E.M.; O’Donnell, F.C.; Brodbeck, C.; Donald, W.N.; Runion, G.B.; Shepherd, S.L. Measuring High Levels of Total Suspended Solids and Turbidity Using Small Unoccupied Aerial Systems (sUAS) Multispectral Imagery. Drones 2020, 4, 54. [Google Scholar] [CrossRef]
- Tang, Y.; Pan, Y.; Zhang, L.; Yi, H.; Gu, Y.; Sun, W. Efficient Monitoring of Total Suspended Matter in Urban Water Based on UAV Multi-spectral Images. Water Resour. Manag. 2023, 37, 2143–2160. [Google Scholar] [CrossRef]
- Li, Z.; Liu, H.; Zhang, C.; Fu, G. Generative adversarial networks for detecting contamination events in water distribution systems using multi-parameter, multi-site water quality monitoring. Environ. Sci. Ecotechnol. 2023, 14, 100231. [Google Scholar] [CrossRef]
- Xiao, Y.; Guo, Y.; Yin, G.; Zhang, X.; Shi, Y.; Hao, F.; Fu, Y. UAV Multispectral Image-Based Urban River Water Quality Monitoring Using Stacked Ensemble Machine Learning Algorithms—A Case Study of the Zhanghe River, China. Remote Sens. 2022, 14, 3272. [Google Scholar] [CrossRef]
- Niu, C.; Tan, K.; Jia, X.; Wang, X. Deep learning based regression for optically inactive inland water quality parameter estimation using airborne hyperspectral imagery. Environ. Pollut. 2021, 286, 117534. [Google Scholar] [CrossRef]
- Liu, M.; Huang, Y.; Hu, J.; He, J.; Xiao, X. Algal community structure prediction by machine learning. Environ. Sci. Ecotechnol. 2023, 14, 100233. [Google Scholar] [CrossRef]
- Lu, Q.; Si, W.; Wei, L.; Li, Z.; Xia, Z.; Ye, S.; Xia, Y. Retrieval of Water Quality from UAV-Borne Hyperspectral Imagery: A Comparative Study of Machine Learning Algorithms. Remote Sens. 2021, 13, 3928. [Google Scholar] [CrossRef]
- Qun’ou, J.; Lidan, X.; Siyang, S.; Meilin, W.; Huijie, X. Retrieval model for total nitrogen concentration based on UAV hyper spectral remote sensing data and machine learning algorithms—A case study in the Miyun Reservoir, China. Ecol. Indic. 2021, 124, 107356. [Google Scholar] [CrossRef]
- Zhang, Y.; Kong, X.; Deng, L.; Liu, Y. Monitor water quality through retrieving water quality parameters from hyperspectral images using graph convolution network with superposition of multi-point effect: A case study in Maozhou River. J. Environ. Manag. 2023, 342, 118283. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, L.; Deng, L.; Ouyang, B. Retrieval of water quality parameters from hyperspectral images using a hybrid feedback deep factorization machine model. Water Res. 2021, 204, 117618. [Google Scholar] [CrossRef]
- Liu, B.; Xi, H.; Li, T.; Borthwick, A.G.L. Black-odorous water bodies annual dynamics in the context of climate change adaptation in Guangzhou City, China. J. Clean. Prod. 2023, 414, 137781. [Google Scholar] [CrossRef]
- Cao, J.; Sun, Q.; Zhao, D.; Xu, M.; Shen, Q.; Wang, D.; Wang, Y.; Ding, S. A critical review of the appearance of black-odorous waterbodies in China and treatment methods. J. Hazard. Mater. 2020, 385, 121511. [Google Scholar] [CrossRef]
- Nasibov, A.; Kholmatov, A.; Nasibov, H.; Hacizade, F. The influence of CCD pixel binning option to its modulation transfer function. In Proceedings of the SPIE Proceedings, Gebze, Turkey, 30 April 2010. [Google Scholar]
- Wei, L.; Wang, Z.; Huang, C.; Zhang, Y.; Wang, Z.; Xia, H.; Cao, L. Transparency Estimation of Narrow Rivers by UAV-Borne Hyperspectral Remote Sensing Imagery. IEEE Access 2020, 8, 168137–168153. [Google Scholar] [CrossRef]
- Cui, M.; Sun, Y.; Huang, C.; Li, M. Water Turbidity Retrieval Based on UAV Hyperspectral Remote Sensing. Water 2022, 14, 128. [Google Scholar] [CrossRef]
- Midya, T.; Garai, D.; Dasgupta, T. A Fast and Accurate Module for Calculating Fractional Order Derivatives and Integrals in Python. In Proceedings of the 2018 9th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Bengaluru, India, 10–12 July 2018. [Google Scholar]
- Zhang, X.; Zhu, G.; Ma, S. Remote-sensing image encryption in hybrid domains. Opt. Commun. 2012, 285, 1736–1743. [Google Scholar] [CrossRef]
- Urbanowicz, R.J.; Meeker, M.; La Cava, W.; Olson, R.S.; Moore, J.H. Relief-based feature selection: Introduction and review. J. Biomed. Inform. 2018, 85, 189–203. [Google Scholar] [CrossRef]
- Effrosynidis, D.; Arampatzis, A. An evaluation of feature selection methods for environmental data. Ecol. Inform. 2021, 61, 101224. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, J.; Miao, J.; Zhen, J.; Wang, J.; Gao, C.; Jiang, J.; Wu, G. Spectral features of Fe and organic carbon in estimating low and moderate concentration of heavy metals in mangrove sediments across different regions and habitat types. Geoderma 2022, 426, 116093. [Google Scholar] [CrossRef]
- Moghimi, A.; Yang, C.; Marchetto, P.M. Ensemble Feature Selection for Plant Phenotyping: A Journey From Hyperspectral to Multispectral Imaging. IEEE Access 2018, 6, 56870–56884. [Google Scholar] [CrossRef]
- Fabian, P.; Gaël, V.; Alexandre, G.; Vincent, M.; Bertrand, T.; Olivier, G.; Mathieu, B.; Peter, P.; Ron, W.; Vincent, D.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Wu, D.; Jiang, J.; Wang, F.; Luo, Y.; Lei, X.; Lai, C.; Wu, X.; Xu, M. Retrieving Eutrophic Water in Highly Urbanized Area Coupling UAV Multispectral Data and Machine Learning Algorithms. Water 2023, 15, 354. [Google Scholar] [CrossRef]
- Lo, Y.; Fu, L.; Lu, T.; Huang, H.; Kong, L.; Xu, Y.; Zhang, C. Medium-Sized Lake Water Quality Parameters Retrieval Using Multispectral UAV Image and Machine Learning Algorithms: A Case Study of the Yuandang Lake, China. Drones 2023, 7, 244. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Zhao, Y.; Wang, X.; Song, S.; Liu, H.; Yu, T. Retrieving Water Quality Parameters from Noisy-Label Data Based on Instance Selection. Remote Sens. 2022, 14, 4742. [Google Scholar] [CrossRef]
- Wang, L.; Yue, X.; Wang, H.; Ling, K.; Liu, Y.; Wang, J.; Hong, J.; Pen, W.; Song, H. Dynamic Inversion of Inland Aquaculture Water Quality Based on UAVs-WSN Spectral Analysis. Remote Sens. 2020, 12, 402. [Google Scholar] [CrossRef]
- Su, T.-C.; Chou, H.-T. Application of Multispectral Sensors Carried on Unmanned Aerial Vehicle (UAV) to Trophic State Mapping of Small Reservoirs: A Case Study of Tain-Pu Reservoir in Kinmen, Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef]
- Rahul, T.S.; Brema, J.; Wessley, G.J.J. Evaluation of surface water quality of Ukkadam lake in Coimbatore using UAV and Sentinel-2 multispectral data. Int. J. Environ. Sci. Technol. 2023, 20, 3205–3220. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Feng, L.; Zhang, Z.; Ma, Y.; Du, Q.; Williams, P.; Drewry, J.; Luck, B. Alfalfa Yield Prediction Using UAV-Based Hyperspectral Imagery and Ensemble Learning. Remote Sens. 2020, 12, 2028. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flights | Time | Speed (m/s) |
|---|---|---|
| 1 | 14 October 2022; 10:56–11:19 | 5.0 |
| 2 | 14 October 2022; 11:55–12:17 | 5.0 |
| 3 | 14 October 2022; 13:35–14:06 | 5.0 |
| 4 | 14 October 2022; 14:33–15:09 | 5.0 |
| 5 | 15 October 2022; 09:32–09:54 | 5.5 |
| 6 | 15 October 2022; 10:42–11:08 | 5.5 |
| 7 | 15 October 2022; 14:01–14:22 | 5.5 |
| 8 | 15 October 2022; 14:44–15:03 | 5.5 |
| Procedures | FOD-DWT Processing | Select Bands by PCC > 0.5 | Feature Selection by 11 Methods | Calculation Accuracies |
|---|---|---|---|---|
| Strategy 1 | √ | |||
| Strategy 2 | √ | √ | ||
| Strategy 3 | √ | √ | √ | √ |
| Parameters | Unit | Min | Max | Mean | Std | Skew | Kurtosis |
|---|---|---|---|---|---|---|---|
| SD | cm | 11.00 | 90.00 | 47.20 | 19.90 | 0.58 | −0.37 |
| TUB | NTU | 7.10 | 75.00 | 24.76 | 17.40 | 1.49 | 2.04 |
| TP | mg/L | 0.09 | 0.49 | 0.19 | 0.08 | 1.64 | 4.04 |
| CODMn | mg/L | 2.30 | 6.80 | 4.32 | 1.06 | 0.64 | −0.11 |
| WQPs | Models | OR | OR_FS | FOD_DWT_231 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | MAPE | MAE | R2 | RMSE | MAPE | MAE | R2 | RMSE | MAPE | MAE | FOD | DWT | ||
| SD | BRR | 0.45 | 18.19 | 0.36 | 14.77 | 0.47 | 17.72 | 0.33 | 14.00 | 0.65 | 14.47 | 0.25 | 10.66 | 1.6 | 4 |
| DTR | 0.45 | 18.11 | 0.38 | 14.21 | 0.53 | 16.70 | 0.38 | 13.29 | 0.68 | 13.73 | 0.32 | 10.86 | 1.6 | 5 | |
| GBR | 0.50 | 17.31 | 0.35 | 12.90 | 0.56 | 16.22 | 0.34 | 12.46 | 0.62 | 15.01 | 0.36 | 11.58 | 1.6 | 6 | |
| XGBR | 0.41 | 18.85 | 0.35 | 13.44 | 0.54 | 16.49 | 0.33 | 12.06 | 0.64 | 14.62 | 0.34 | 10.86 | 1.6 | 4 | |
| TUB | BRR | 0.61 | 12.84 | 0.37 | 8.25 | 0.70 | 11.28 | 0.31 | 7.11 | 0.55 | 13.80 | 0.32 | 8.29 | 0.8 | 9 |
| DTR | 0.49 | 14.72 | 0.21 | 7.59 | 0.69 | 11.50 | 0.16 | 6.00 | 0.90 | 6.50 | 0.17 | 4.07 | 2 | 4 | |
| GBR | 0.46 | 15.21 | 0.38 | 9.13 | 0.52 | 14.36 | 0.30 | 8.67 | 0.65 | 12.14 | 0.23 | 6.93 | 1.2 | 6 | |
| XGBR | 0.19 | 18.55 | 0.33 | 11.02 | 0.40 | 15.95 | 0.24 | 8.40 | 0.72 | 10.87 | 0.23 | 7.08 | 0.5 | 0 | |
| TP | BRR | 0.27 | 0.09 | 0.26 | 0.05 | 0.44 | 0.08 | 0.27 | 0.05 | 0.50 | 0.07 | 0.19 | 0.04 | 0.3 | 5 |
| DTR | −0.17 | 0.11 | 0.43 | 0.07 | 0.74 | 0.05 | 0.25 | 0.04 | 0.70 | 0.06 | 0.28 | 0.04 | 0 | 5 | |
| GBR | 0.18 | 0.09 | 0.36 | 0.06 | 0.32 | 0.08 | 0.33 | 0.05 | 0.51 | 0.07 | 0.25 | 0.05 | 1.5 | 1 | |
| XGBR | 0.35 | 0.08 | 0.31 | 0.05 | 0.51 | 0.07 | 0.31 | 0.05 | 0.59 | 0.07 | 0.26 | 0.04 | 1.2 | 2 | |
| CODMn | BRR | 0.88 | 0.36 | 0.06 | 0.28 | 0.87 | 0.36 | 0.07 | 0.29 | 0.94 | 0.26 | 0.05 | 0.21 | 1.7 | 5 |
| DTR | 0.64 | 0.61 | 0.12 | 0.46 | 0.82 | 0.43 | 0.09 | 0.35 | 0.92 | 0.29 | 0.05 | 0.24 | 0.7 | 2 | |
| GBR | 0.82 | 0.43 | 0.08 | 0.32 | 0.90 | 0.33 | 0.07 | 0.27 | 0.94 | 0.24 | 0.04 | 0.17 | 0.8 | 9 | |
| XGBR | 0.72 | 0.53 | 0.11 | 0.43 | 0.83 | 0.41 | 0.06 | 0.28 | 0.96 | 0.20 | 0.04 | 0.15 | 1.8 | 6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Li, T. A Machine-Learning-Based Framework for Retrieving Water Quality Parameters in Urban Rivers Using UAV Hyperspectral Images. Remote Sens. 2024, 16, 905. https://doi.org/10.3390/rs16050905
Liu B, Li T. A Machine-Learning-Based Framework for Retrieving Water Quality Parameters in Urban Rivers Using UAV Hyperspectral Images. Remote Sensing. 2024; 16(5):905. https://doi.org/10.3390/rs16050905
Chicago/Turabian StyleLiu, Bing, and Tianhong Li. 2024. "A Machine-Learning-Based Framework for Retrieving Water Quality Parameters in Urban Rivers Using UAV Hyperspectral Images" Remote Sensing 16, no. 5: 905. https://doi.org/10.3390/rs16050905
APA StyleLiu, B., & Li, T. (2024). A Machine-Learning-Based Framework for Retrieving Water Quality Parameters in Urban Rivers Using UAV Hyperspectral Images. Remote Sensing, 16(5), 905. https://doi.org/10.3390/rs16050905