

A Segmented Sliding Window Reference Signal Reconstruction Method Based on Fuzzy C-Means


Abstract
1. Introduction
2. DTMB Standard
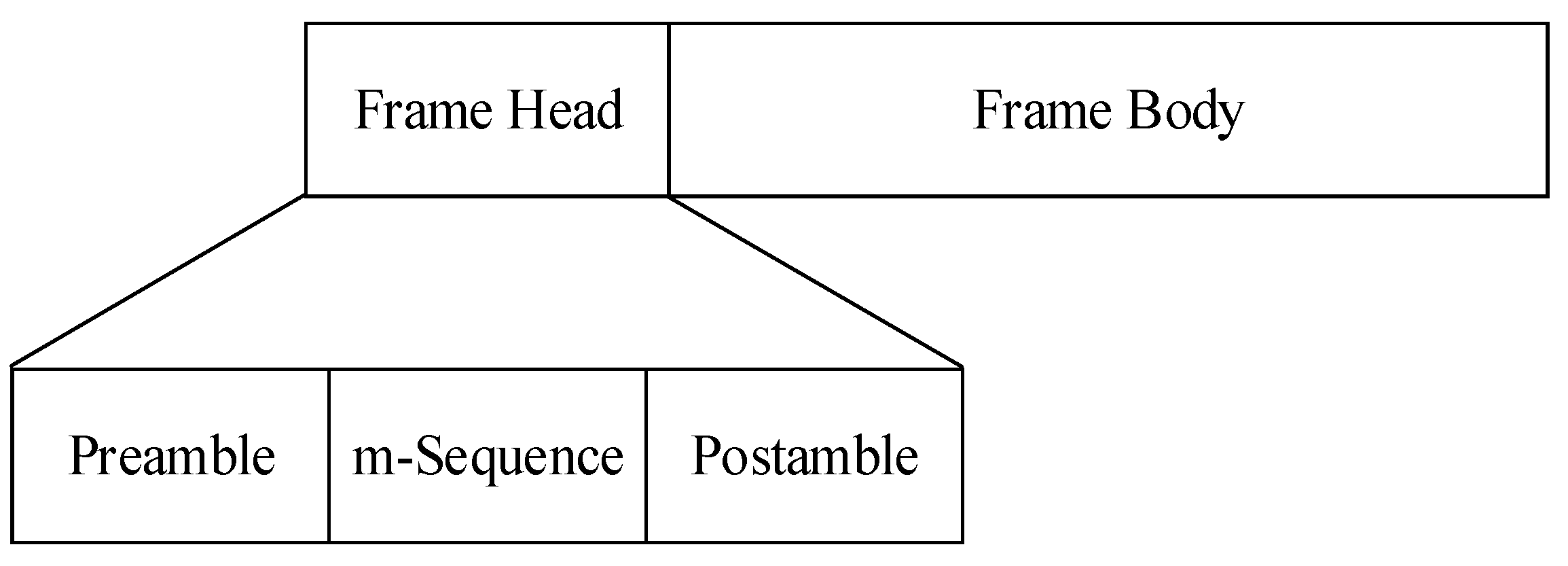
2.1. Signal Structure of DTMB
2.2. Transmitting System Scheme
- randomization of the input data;
- forward error correction coding;
- mapping and interleaving;
- frame combination and baseband processing;
- orthogonal up-conversion.
3. Reference Signal Reconstruction
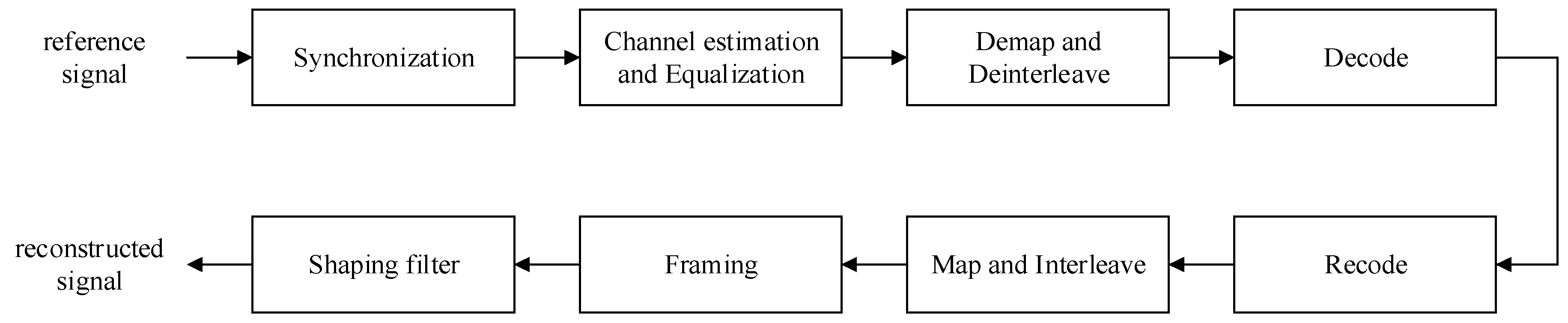
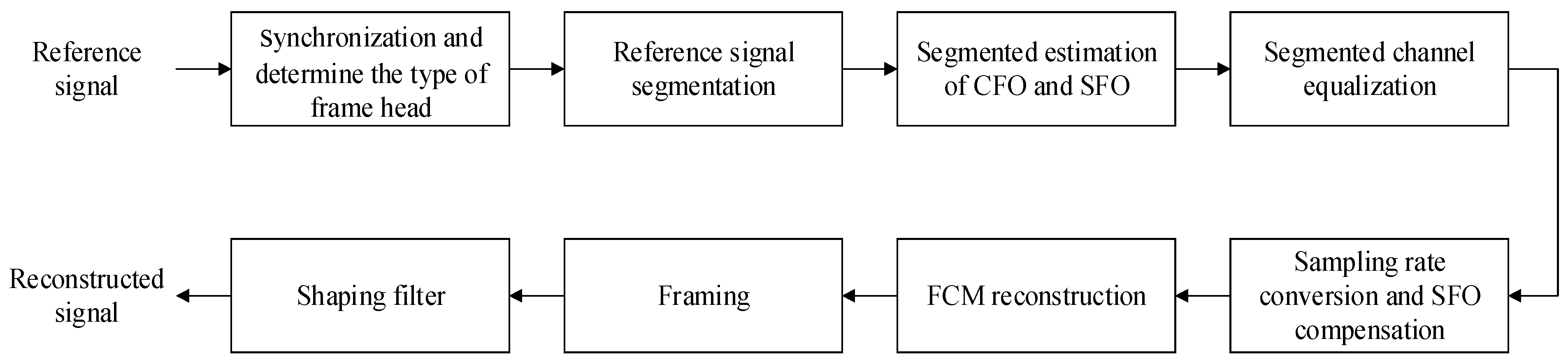
3.1. The Process of Reference Signal Reconstruction
3.1.1. Synchronization
3.1.2. Channel Estimation and Equalization
3.1.3. Decoding
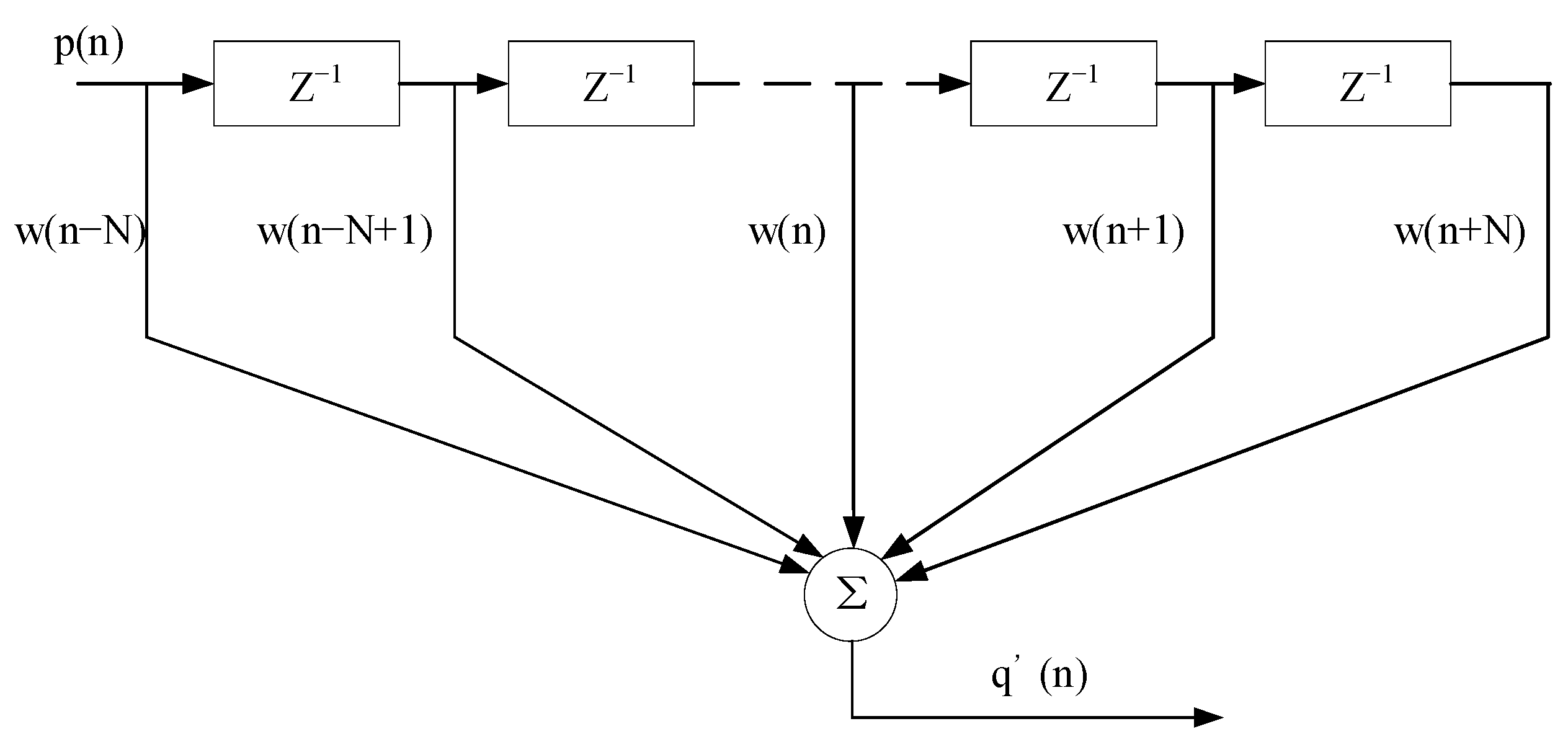
3.2. Segmented Sliding Window Reference Signal Reconstruction Method Based on Fuzzy C-Means
4. Simulation and Experimental Verification
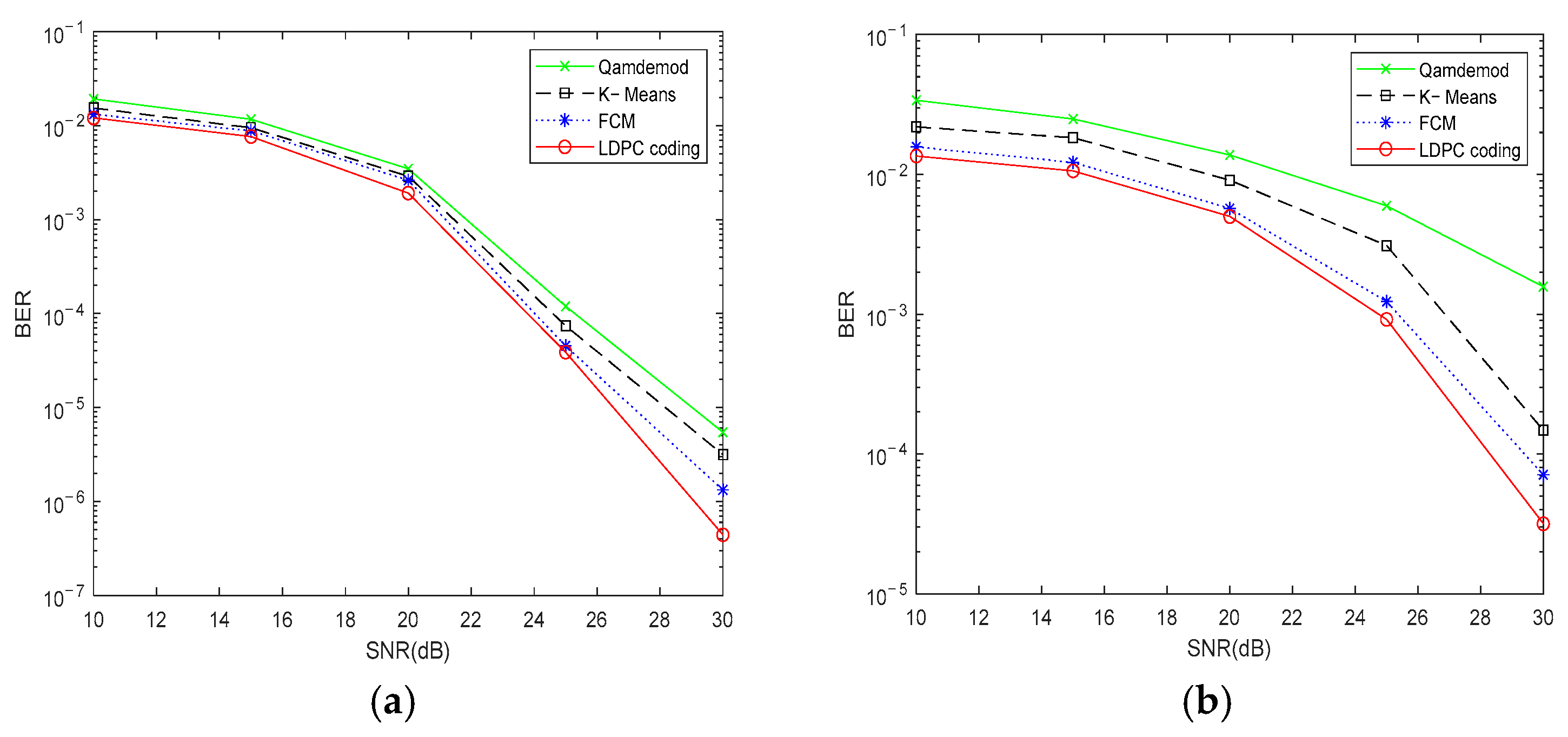
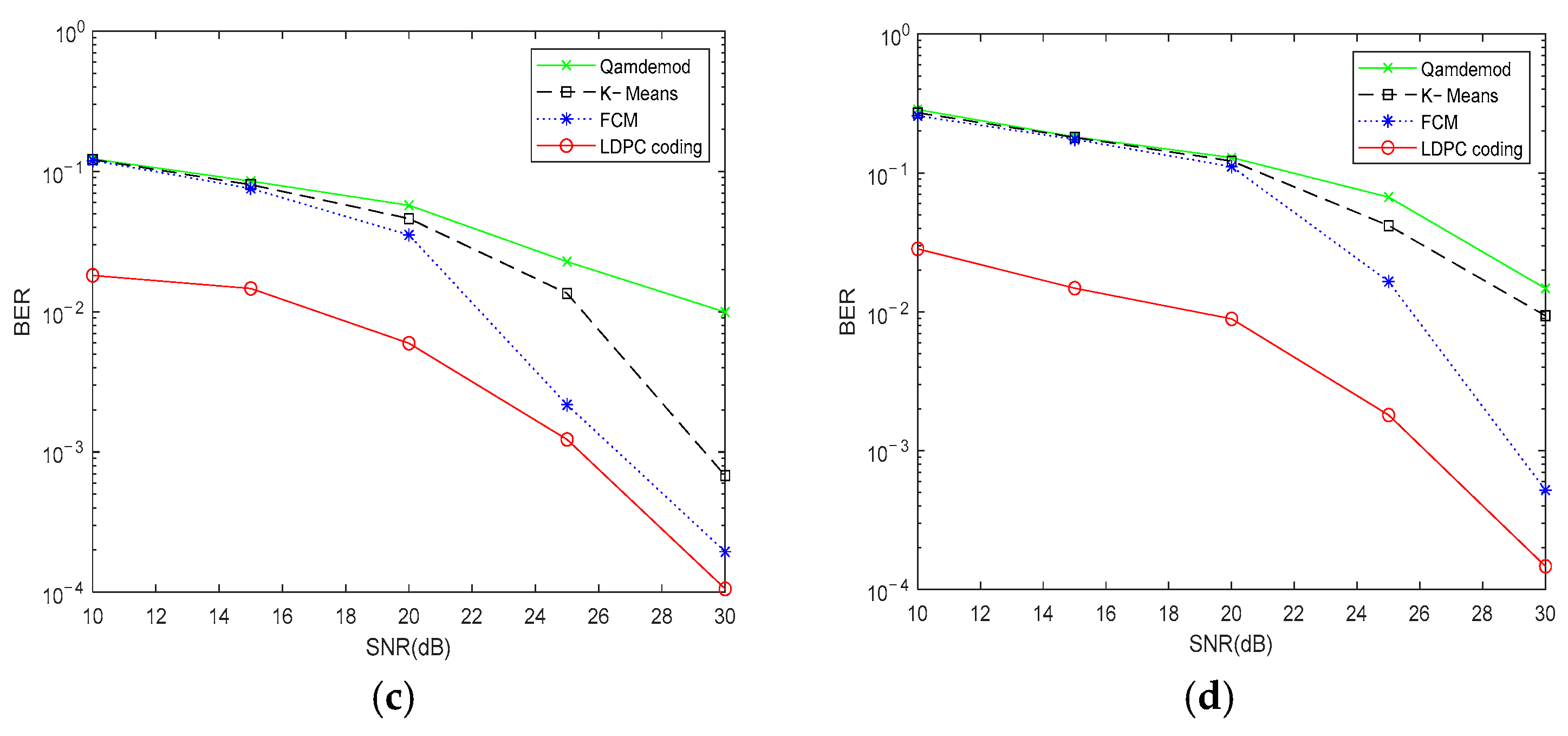
4.1. Simulation Analysis
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, X.; Wang, Z.; Peng, Q.; Xu, H.; He, Z. LSS UAV Target Intelligent Detection in Urban Complex Environment. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021; IEEE: New York, NY, USA, 2021; pp. 648–650. [Google Scholar]
- Fang, M.; Li, L.; Zhao, C.; Guo, Y.; Qi, Z. A LSS-Target Detection Method for Urban Complex Environment. In Proceedings of the 2021 2nd China International SAR Symposium (CISS), Shanghai, China, 3 November 2021; IEEE: New York, NY, USA, 2021; pp. 1–5. [Google Scholar]
- Chen, S.; Yin, Y.; Wang, Z.; Gui, F. Low-Altitude Protection Technology of Anti-UAVs Based on Multisource Detection Information Fusion. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962907. [Google Scholar] [CrossRef]
- Chen, S.; Dang, Y.; Liu, M.; Wang, H.; Lv, F. Surveillance of Ground and LSS Targets: A Radar-Photoelectric Early Warning System. In Proceedings of the 2023 Cross Strait Radio Science and Wireless Technology Conference (CSRSWTC), Guilin, China, 10 November 2023; IEEE: New York, NY, USA, 2023; pp. 1–3. [Google Scholar]
- Tan, M. Signal Processing Techniques for LFMCW Radar under Urban Low, Slow, and Small Conditions. In Proceedings of the 2024 4th International Conference on Neural Networks, Information and Communication (NNICE), Guangzhou, China, 19 January 2024; IEEE: New York, NY, USA, 2024; pp. 1171–1175. [Google Scholar]
- Shoufan, A.; Al-Angari, H.M.; Sheikh, M.F.A.; Damiani, E. Drone Pilot Identification by Classifying Radio-Control Signals. IEEE Trans. Inf. Forensics Secur. 2018, 13, 2439–2447. [Google Scholar] [CrossRef]
- Sun, H.; Liu, Q.; Wang, J.; Ren, J.; Wu, Y.; Zhao, H.; Li, H. Fusion of Infrared and Visible Images for Remote Detection of Low-Altitude Slow-Speed Small Targets. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2971–2983. [Google Scholar] [CrossRef]
- Pang, D.; Shan, T.; Ma, P.; Li, W.; Liu, S.; Tao, R. A Novel Spatiotemporal Saliency Method for Low-Altitude Slow Small Infrared Target Detection. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, H. Study of Low-Altitude Slow and Small Target Detection on Radar. In Proceedings of 2017 5th International Conference on Machinery, Materials and Computing Technology (ICMMCT 2017), Beijing, China, 25–26 March 2017; Atlantis Press: Paris, France, 2017. [Google Scholar]
- Yu, Q.; Rao, B.; Luo, P. Detection Performance Analysis of Small Target Under Clutter Based on LFMCW Radar. In Proceedings of the 2018 IEEE 3rd International Conference on Signal and Image Processing (ICSIP), Shenzhen, China, 13–15 July 2018; IEEE: New York, NY, USA, 2018; pp. 121–125. [Google Scholar]
- He, Z.; Sun, J.; Zhang, W.; An, K.; Wang, C.-X. A Passive Broadband Radar System Design for Low, Slow and Small Target Detection. In Proceedings of the 2022 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Sanshui, China, 11 August 2022; IEEE: New York, NY, USA, 2022; pp. 18–23. [Google Scholar]
- Kuschel, H.; Cristallini, D.; Olsen, K.E. Tutorial: Passive radar tutorial. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 2–19. [Google Scholar] [CrossRef]
- Coleman, C.; Yardley, H. Passive bistatic radar based on target illuminations by digital audio broadcasting. IET Radar Sonar Navig. 2008, 2, 366–375. [Google Scholar] [CrossRef]
- Tao, R.; Wu, H.; Shan, T. Direct-path suppression by spatial filtering in digital television terrestrial broadcasting-based passive radar. IET Radar Sonar Navig. 2010, 4, 791–805. [Google Scholar] [CrossRef]
- Dawidowicz, B.; Samczynski, P.; Malanowski, M.; Misiurewicz, J. Detection of moving targets with multichannel airborne passive radar. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 42–49. [Google Scholar] [CrossRef]
- Palmer, J. A Signal Processing Scheme for a Multichannel Passive Radar System. In Proceedings of the 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), South Brisbane, QL, Australia, 19–24 April 2015; pp. 5575–5579. [Google Scholar]
- O’Hagan, D.W.; Setsubi, M.; Paine, S. Signal Reconstruction of DVB-T2 Signals in Passive Radar. In Proceedings of the 2018 IEEE Radar Conference (RadarConf), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1111–1116. [Google Scholar]
- Daun, M.; Nickel, U.; Koch, W. Tracking in multistatic passive radar systems using DAB/DVB-T illumination. Signal Process. 2012, 92, 1365–1386. [Google Scholar] [CrossRef]
- Choi, S.; Crouse, D.; Willett, P.; Zhou, S. Multistatic target tracking for passive radar in a DAB/DVB network: Initiation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2460–2469. [Google Scholar] [CrossRef]
- Miao, Y.; Li, J.; Bao, Y.; Liu, F.; Hu, C. Efficient Multipath Clutter Cancellation for UAV Monitoring Using DAB Satellite-Based PBR. Remote Sens. 2021, 13, 3429. [Google Scholar] [CrossRef]
- Palmer, J.E.; Harms, H.A.; Searle, S.J.; Davis, L. DVB-T passive radar signal processing. IEEE Trans. Signal Process. 2012, 61, 2116–2126. [Google Scholar] [CrossRef]
- Klincewicz, K.; Samczy’nski, P. Method of Calculating Desynchronization of DVB-T Transmitters Working in SFN for PCL Applications. Sensors 2020, 20, 5776. [Google Scholar] [CrossRef] [PubMed]
- Colone, F. DVB-T-Based Passive Forward Scatter Radar: Inherent Limitations and Enabling Solutions. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1084–1104. [Google Scholar] [CrossRef]
- Lü, M.; Yi, J.; Wan, X.; Zhan, W. Co-channel Interference in DTMB-Based Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2138–2149. [Google Scholar] [CrossRef]
- Hu, S.; Yi, J.; Wan, X.; Cheng, F.; Hu, Y.; Hao, C. Illuminator of Opportunity Localization for Digital Broadcast-Based Passive Radar in Moving Platforms. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 3539–3549. [Google Scholar] [CrossRef]
- Zhang, C.; Li, J.; Gao, P.; Pan, C.; Li, X.; Qi, W.; Yang, F. SFN Structure and Field Trials Based on Satellite Links for DTMB System. In Proceedings of the 2016 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Nara, Japan, 1–3 June 2016; pp. 1–5. [Google Scholar]
- Chen, G.; Tian, B.; Gong, J.; Feng, C.Q. Reconstruction of Passive Radar Reference Signal Based on DTMB. In Proceedings of the 2019 IEEE 2nd International Conference on Information Communication and Signal Processing (ICICSP), Weihai, China, 28–30 September 2019; pp. 170–174. [Google Scholar]
- Garry, J.L.; Baker, C.J.; Smith, G.E. Evaluation of Direct Signal Suppression for Passive Radar. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3786–3799. [Google Scholar] [CrossRef]
- Wan, X.; Cheng, Y.; Tang, H.; Liu, Y. The Effects of Non-Ideal Factors on Clutter Cancellation in DTMB-Based Passive Radar. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1440–1445. [Google Scholar]
- Feng, W.; Friedt, J.M.; Cherniak, G.; Sato, M. Batch compressive sensing for passive radar range-Doppler map generation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3090–3102. [Google Scholar] [CrossRef]
- Fang, L.; Wan, X.; Fang, G.; Cheng, F. Passive detection using orthogonal frequency division multiplex signals of opportunity without multipath clutter cancellation. IET Radar Sonar Navig. 2016, 10, 516–524. [Google Scholar] [CrossRef]
- Song, L.Q.; Wang, J.; Pan, C.Y.; Fu, J. A Normalized LLR Soft Information Demapping Method in DTMB System. In Proceedings of the 2008 11th IEEE Singapore International Conference on Communication Systems (ICCS), Guangzhou, China, 19–21 November 2008; pp. 1297–1301. [Google Scholar]
- Wu, Y.; Chen, Z.; Peng, D. Target Detection of Passive Bistatic Radar under the Condition of Impure Reference Signal. Remote Sens. 2023, 15, 3876. [Google Scholar] [CrossRef]
- Zuo, L.; Wang, J.; Zhao, T.; Cheng, Z. A Joint Low-Rank and Sparse Method for Reference Signal Purification in DTMB-Based Passive Bistatic Radar. Sensors 2021, 21, 3607. [Google Scholar] [CrossRef] [PubMed]
- Berger, C.R.; Demissie, B.; Heckenbach, J.; Willett, P. Signal Processing for Passive Radar Using OFDM Waveforms. IEEE J. Sel. Top. Signal Process. 2010, 4, 226–238. [Google Scholar] [CrossRef]
- Tang, H.; Wan, X.; Liu, Y.; Cheng, Y.; Yi, J. On the Performance of Multipath in Reference Signal for Passive Radar Interference Cancellation. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1313–1316. [Google Scholar]
- Xiang, O.Y.; Ruan, C.C.; Zheng, L.X. Implementation of LDPC Encoding to DTMB Standard Based on FPGA. In Proceedings of the 2011 10th IEEE/ACIS International Conference on Computer and Information Science (ACIS), Sanya, China, 16–18 May 2011; pp. 235–238. [Google Scholar]
- Li, Y.; Zhang, Q. The Study for Parameter Configuration of the Reference Network of Chinese Digital Television. In Proceedings of the 2011 4th International Congress on Image and Signal Processing (CISP), Shanghai, China, 15–17 October 2011; pp. 322–326. [Google Scholar]
- Wu, J.; Chen, Y.; Zeng, X.; Min, H. Robust Timing and Frequency Synchronization Scheme for DTMB System. IEEE Trans. Consumer Electron. 2007, 53, 1348–1352. [Google Scholar] [CrossRef]
- Yan, K.; Ding, W.; Zhang, L.; Yin, Y.; Yang, F.; Pan, C. Measurement and Prediction of DTMB Reception Quality in Single Frequency Networks. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference (WiCom), Istanbul, Turkey, 4–8 July 2011; pp. 936–940. [Google Scholar]
- El-Hajjar, M.; Hanzo, L. A Survey of Digital Television Broadcast Transmission Techniques. IEEE Commun. Surv. Tutor. 2013, 15, 1924–1949. [Google Scholar] [CrossRef]
- Bournaka, G.; Ummenhofer, M.; Cristallini, D.; Palmer, J.; Summers, A. Experimental Study for Transmitter Imperfections in DVB-T Based Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1341–1354. [Google Scholar] [CrossRef]
- Jin, H.P.; Peng, K.W.; Song, J. Backward Compatible Multiservice Transmission Over the DTMB System. IEEE Trans. Broadcast. 2014, 60, 499–510. [Google Scholar]
- Bae, J.; Kim, Y.; Hur, N.; Choi, D.-J.; Kim, H.J.; Kim, H.-N. Data Rate Increasing Method Using Multiple PN Sequences for the Superposed PNs on Broadcasting System Signals. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics—Asia (ICCE-Asia), Seoul, Republic of Korea, 1 November 2020; pp. 1–5. [Google Scholar]
- Zhang, S.; Zhang, X.L.; Zhang, C. A Cyclostationary Frequency Offset Estimation for DTMB System. In Proceedings of the 2008 9th International Conference on Signal Processing (ICSP), Beijing, China, 26–29 October 2008; pp. 1822–1825. [Google Scholar]
- Sato, A.; Shitomi, T.; Takeuchi, T.; Okano, M.; Tsuchida, K. Transmission Performance Evaluation of LDPC Coded OFDM over Actual Propagation Channels in Urban Area. Examination for next-Generation ISDB-T. In Proceedings of the 2017 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Cagliari, Italy, 7–9 June 2017; pp. 1–5. [Google Scholar]
- He, S.; Feng, Y.; Shan, T. A Novel Interference Suppression Method for DTMB-Based Passive Radar. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15 December 2021; pp. 2799–2803. [Google Scholar]
- Blasone, G.P.; Colone, F.; Lombardo, P.; Wojaczek, P. Passive Radar DPCA Schemes with Adaptive Channel Calibration. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4014–4034. [Google Scholar] [CrossRef]
- Wan, X.R.; Wang, J.F.; Hong, S.; Tang, H. Reconstruction of Reference Signal for DTMB-Based Passive Radar Systems. In Proceedings of the 2011 IEEE CIE International Conference on Radar (Radar), Chengdu, China, 24–27 October 2011; pp. 165–168. [Google Scholar]
- Gao, T.; Li, A.; Meng, F. Research on Data Stream Clustering Based on FCM Algorithm 1. Procedia Comput. Sci. 2017, 122, 595–602. [Google Scholar] [CrossRef]
- Hou, Z.; Li, C.; Luo, Y.; Li, Q.; Xue, J. Colour Selection for Mosaic Tiles Based on FCM Clustering Algorithm. In Proceedings of the 2022 5th World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM), Ma’anshan, China, 18 November 2022; pp. 1032–1035. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol Constellation Mapping Mode | Symbol Reconstruction Algorithm | Running Time (s) |
|---|---|---|
| 4QAM | LDPC decoding | 5.0938 |
| FCM | 0.3512 | |
| 16QAM | LDPC decoding | 176.0781 |
| FCM | 12.7384 | |
| 32QAM | LDPC decoding | 247.6813 |
| FCM | 17.6915 | |
| 64QAM | LDPC decoding | 365.4063 |
| FCM | 25.6605 |
| Coding Rate | Line Number (M) | Column Number (N) | Sum of Row Weight (L) |
|---|---|---|---|
| 0.4 | 4445 | 7493 | 34,925 |
| 0.6 | 2921 | 7493 | 37,592 |
| 0.8 | 1397 | 7493 | 37,338 |
| Coding Rate | Addition | Multiplication | Comparison |
|---|---|---|---|
| 0.4 | 77,343 | 62,357 | 37,973 |
| 0.6 | 82,677 | 67,681 | 42,164 |
| 0.8 | 82,169 | 67,138 | 43,434 |
| Symbol Constellation Mapping Mode | Symbol Reconstruction Algorithm | Running Time (s) |
|---|---|---|
| 4QAM | Traditional method | 103.4792 |
| Proposed method | 89.6374 | |
| 16QAM | Traditional method | 273.4981 |
| Proposed method | 104.1637 | |
| 32QAM | Traditional method | 347.6967 |
| Proposed method | 116.8731 | |
| 64QAM | Traditional method | 469.1237 |
| Proposed method | 143.7413 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Feng, Y.; Zhang, Y.; Qiao, X.; Wang, Z.; Shan, T. A Segmented Sliding Window Reference Signal Reconstruction Method Based on Fuzzy C-Means. Remote Sens. 2024, 16, 1813. https://doi.org/10.3390/rs16101813
Liang H, Feng Y, Zhang Y, Qiao X, Wang Z, Shan T. A Segmented Sliding Window Reference Signal Reconstruction Method Based on Fuzzy C-Means. Remote Sensing. 2024; 16(10):1813. https://doi.org/10.3390/rs16101813
Chicago/Turabian StyleLiang, Haobo, Yuan Feng, Yushi Zhang, Xingshuai Qiao, Zhi Wang, and Tao Shan. 2024. "A Segmented Sliding Window Reference Signal Reconstruction Method Based on Fuzzy C-Means" Remote Sensing 16, no. 10: 1813. https://doi.org/10.3390/rs16101813
APA StyleLiang, H., Feng, Y., Zhang, Y., Qiao, X., Wang, Z., & Shan, T. (2024). A Segmented Sliding Window Reference Signal Reconstruction Method Based on Fuzzy C-Means. Remote Sensing, 16(10), 1813. https://doi.org/10.3390/rs16101813