
Deep Learning-Based Automatic River Flow Estimation Using RADARSAT Imagery



Abstract
1. Introduction
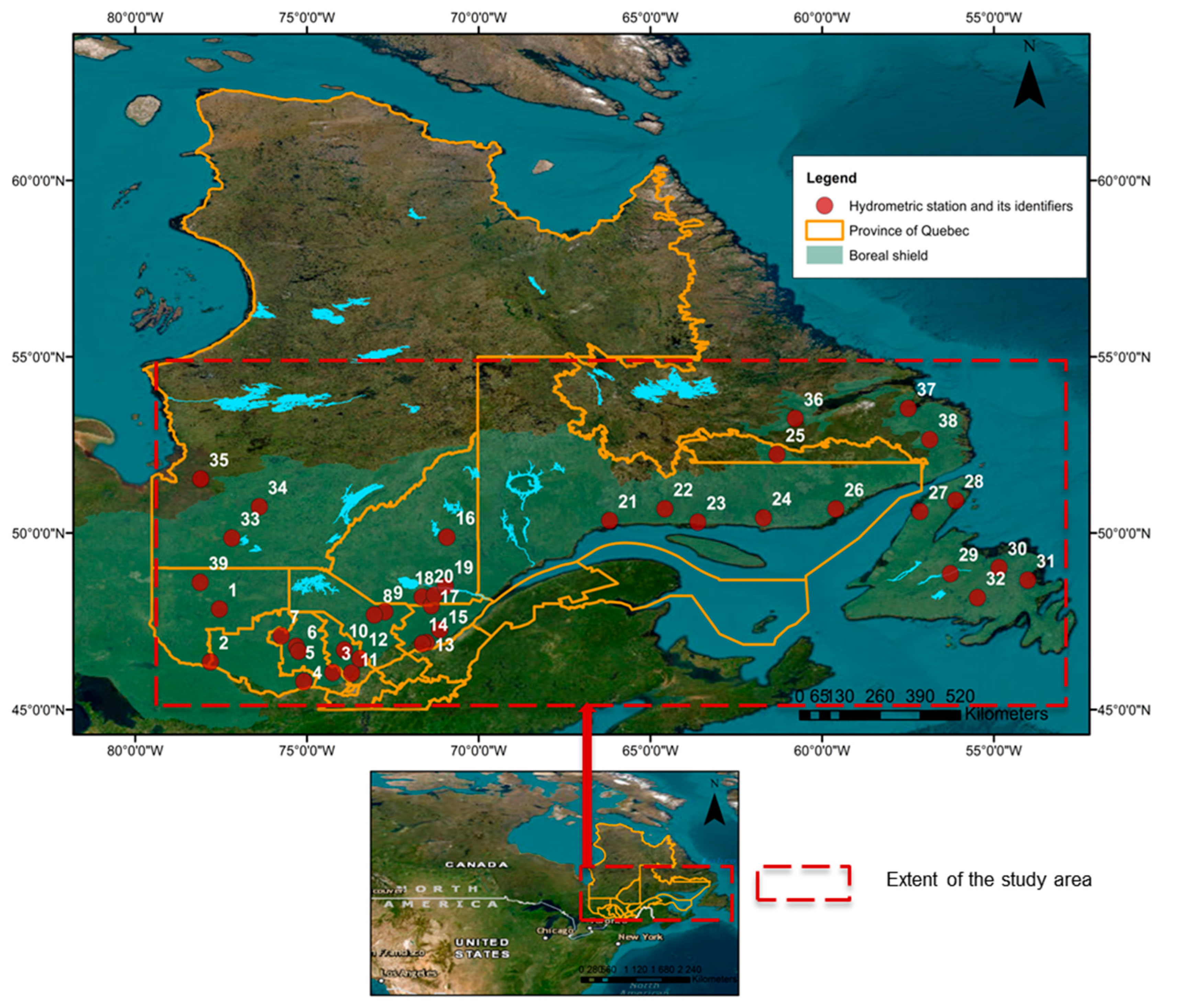
2. Study Area
3. Materials and Methods
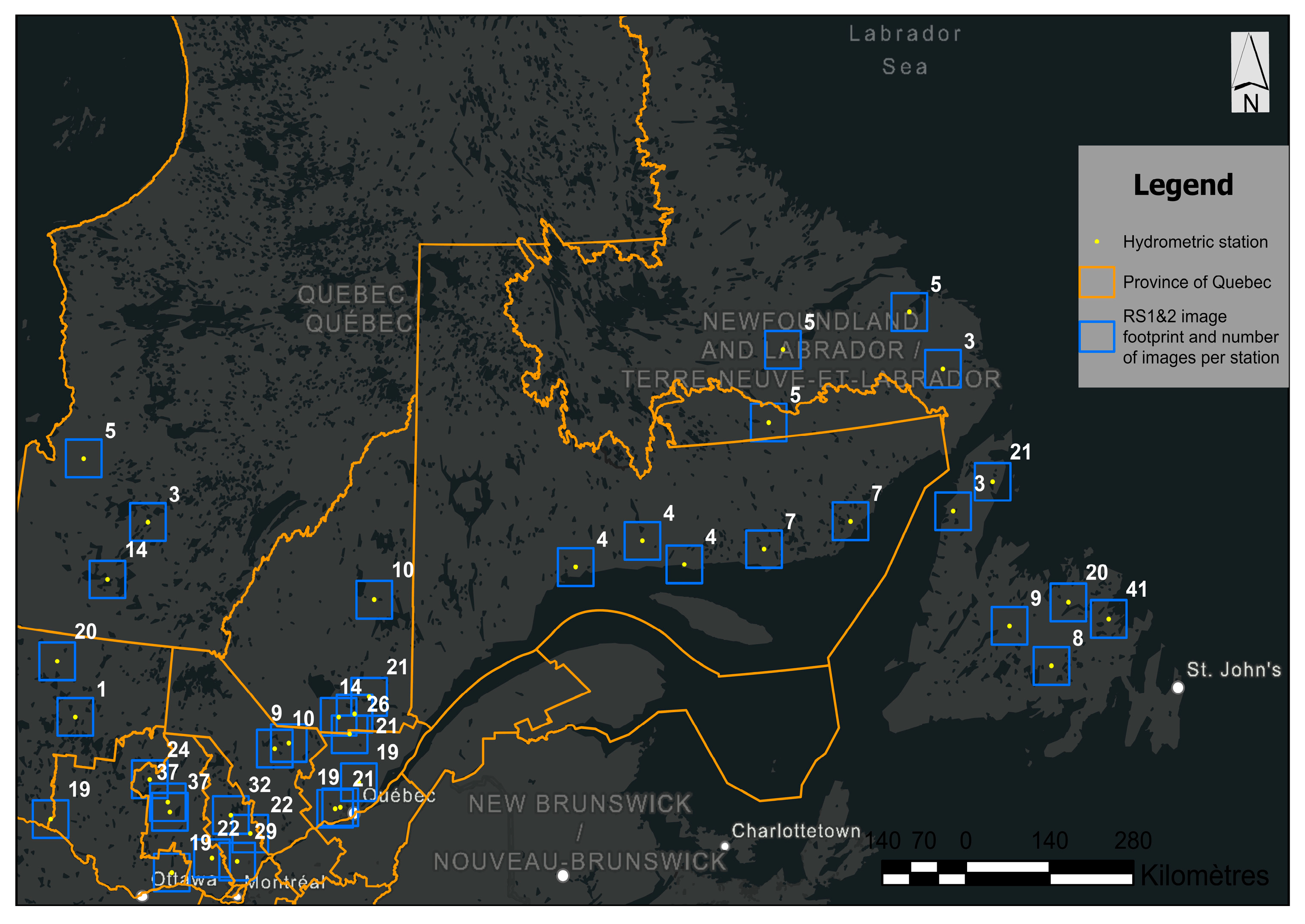
3.1. In Situ and Satellite Dataset
3.1.1. Satellite Data
3.1.2. In Situ Gauge Dataset
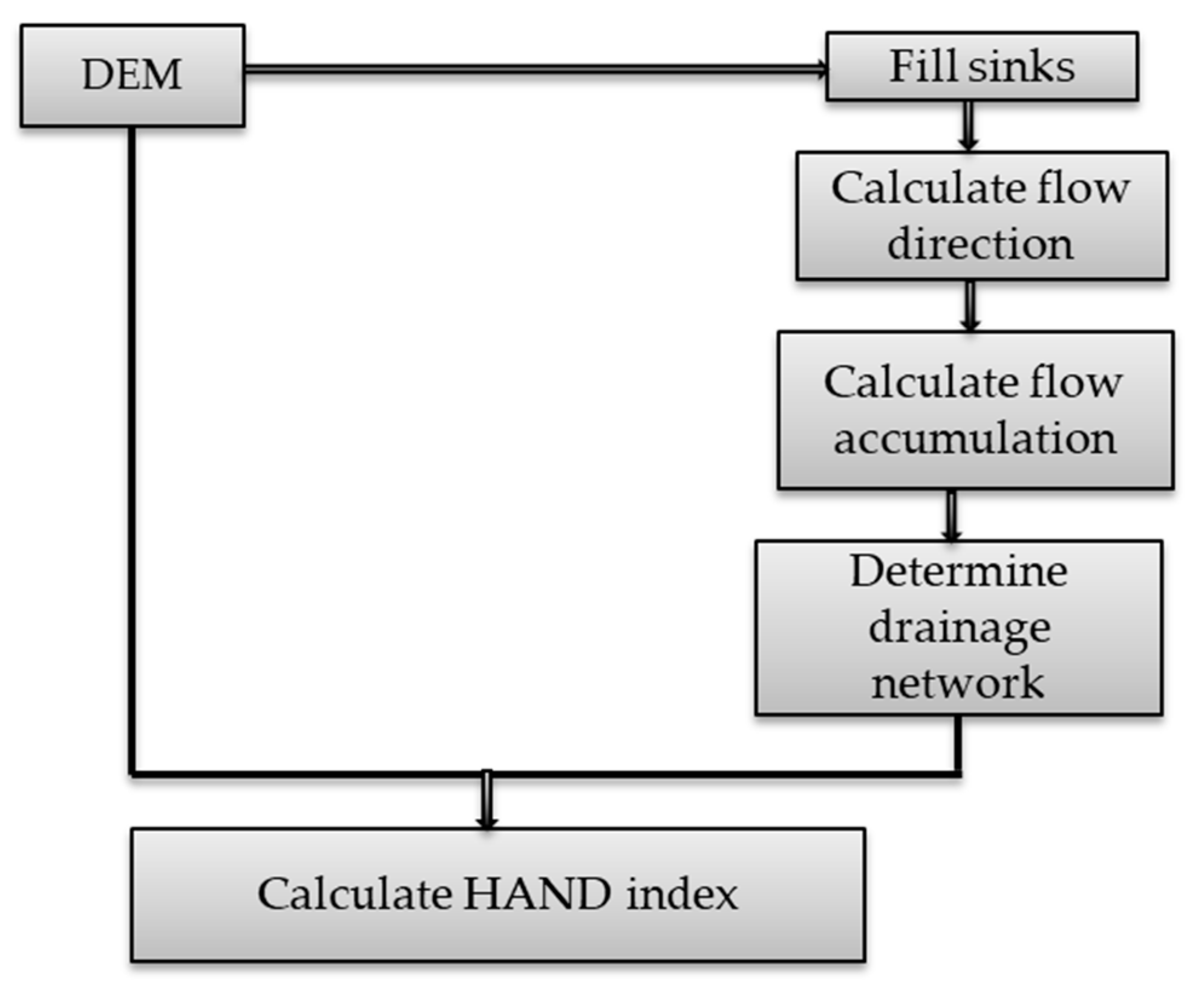
3.1.3. Topographic Dataset
- Modeling the water flow: to do so, the DEM is first adapted to this objective. Indeed, the DEM contains pits that pose a problem when determining the direction of flow (pits are generally cells surrounded by higher cells). Therefore, the objective is to fill these pits. A hydrologically coherent DEM is thus obtained, which allows the direction of the flow to be defined and to generate an accumulated surface grid. The latter is used to define the drainage network.
- Generating the nearest drainage map: the data from the local flow direction and the drainage network are combined. Each pixel in the map corresponds to a DEM pixel draining to that pixel. DEM pixels are calculated by calculating their elevational difference from the nearest drainage pixel.
3.2. CNN Approach to River Flow Estimation
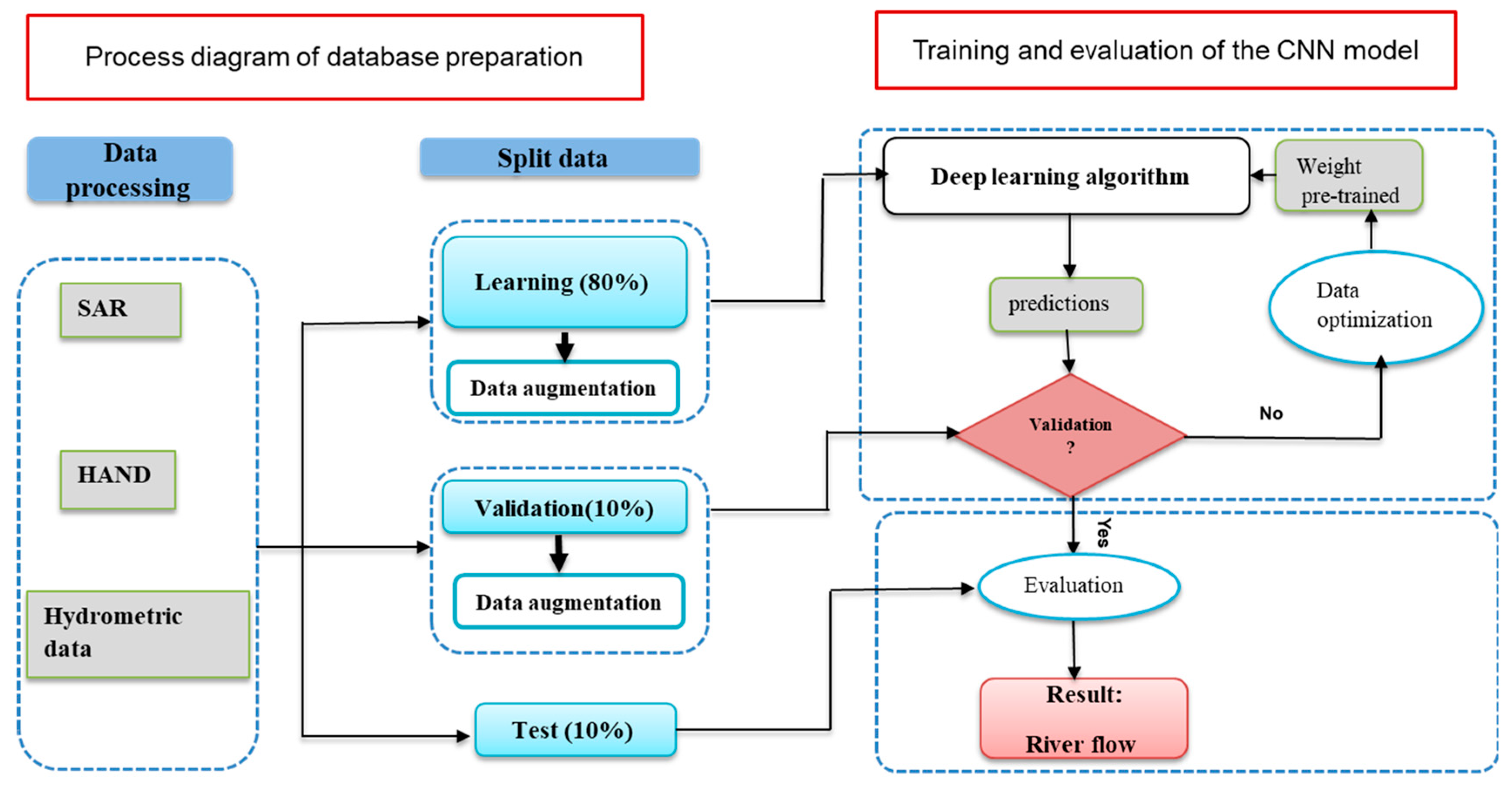
3.2.1. Input Data Pre-Processing
3.2.2. Training and Evaluation of the Deep-Learning Model
3.2.3. Proposed CNN Architecture
3.2.4. Model Libraries
3.2.5. Evaluation of Model Performance
4. Results
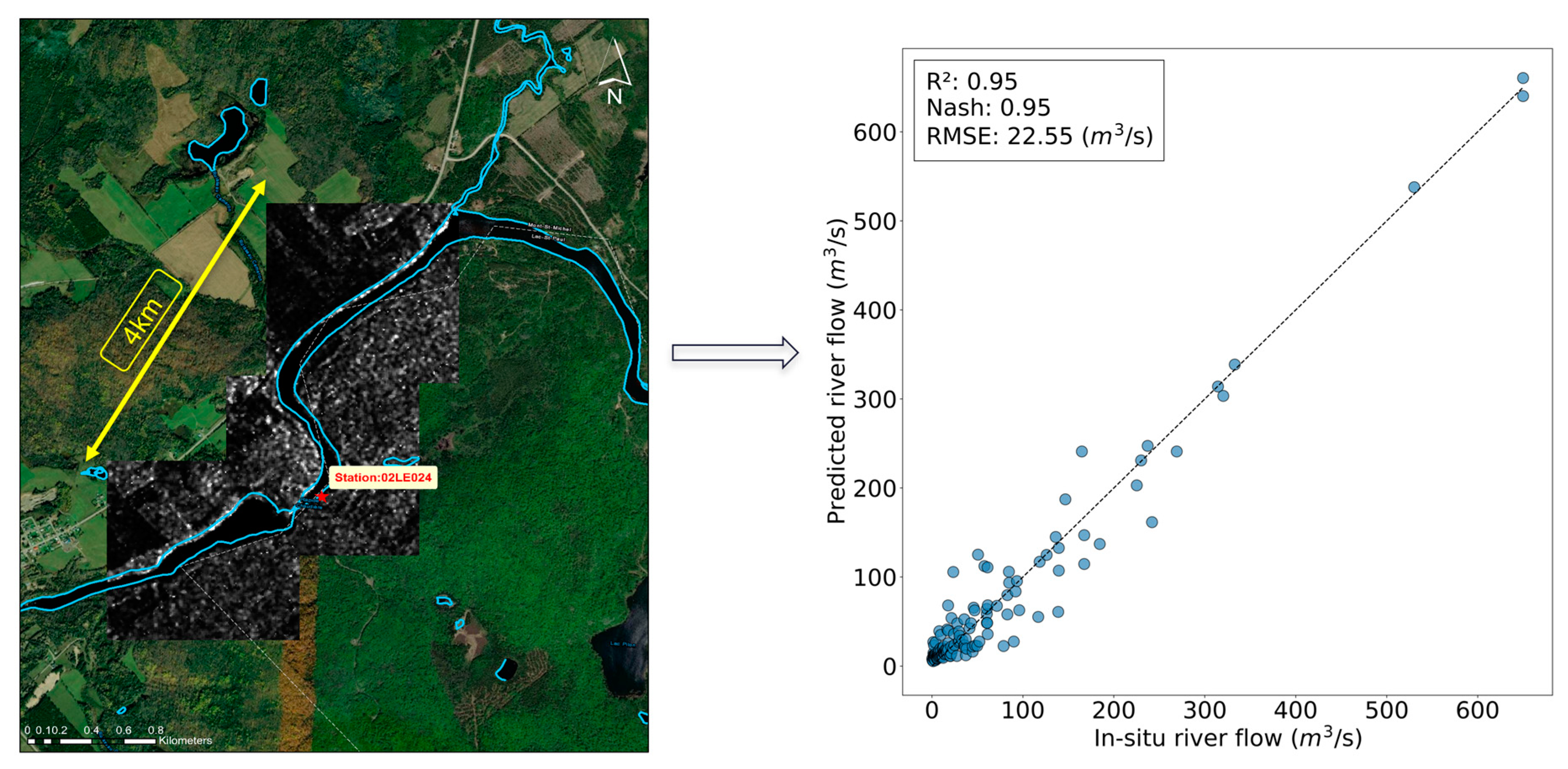
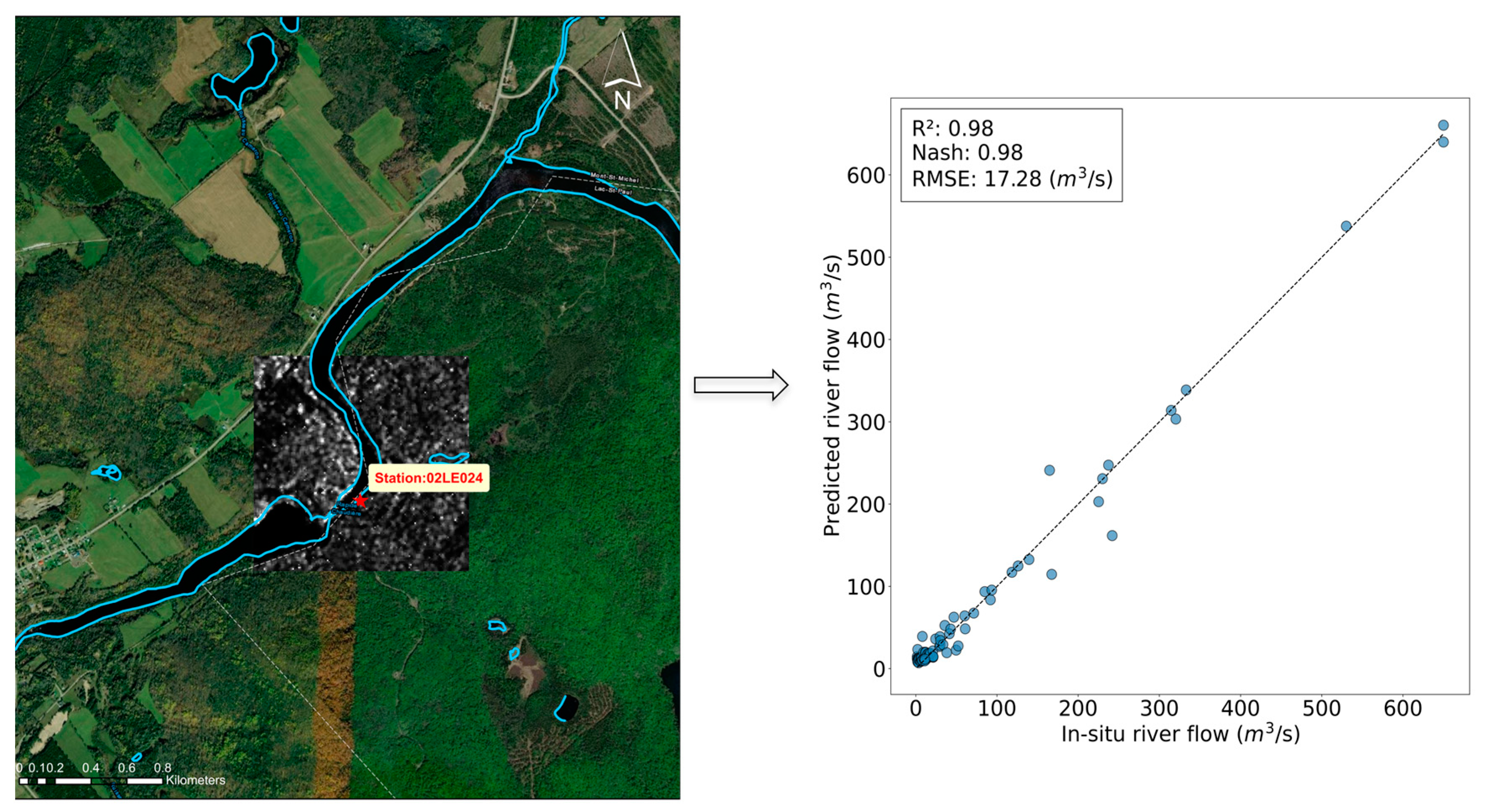
4.1. Analysis Based on Input Data
4.2. Analysis According to the Morphometric Characteristics of the Estimation Site
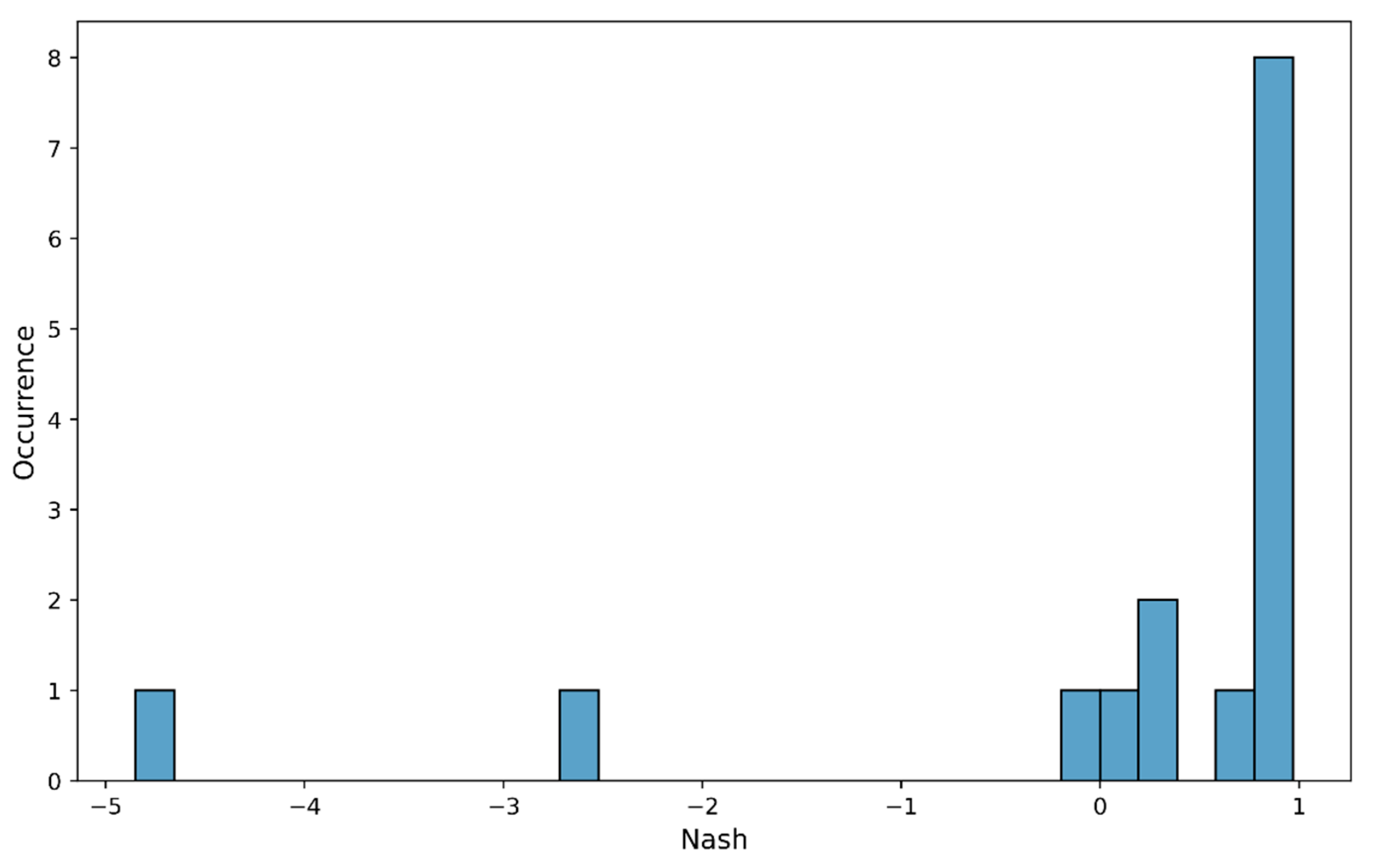
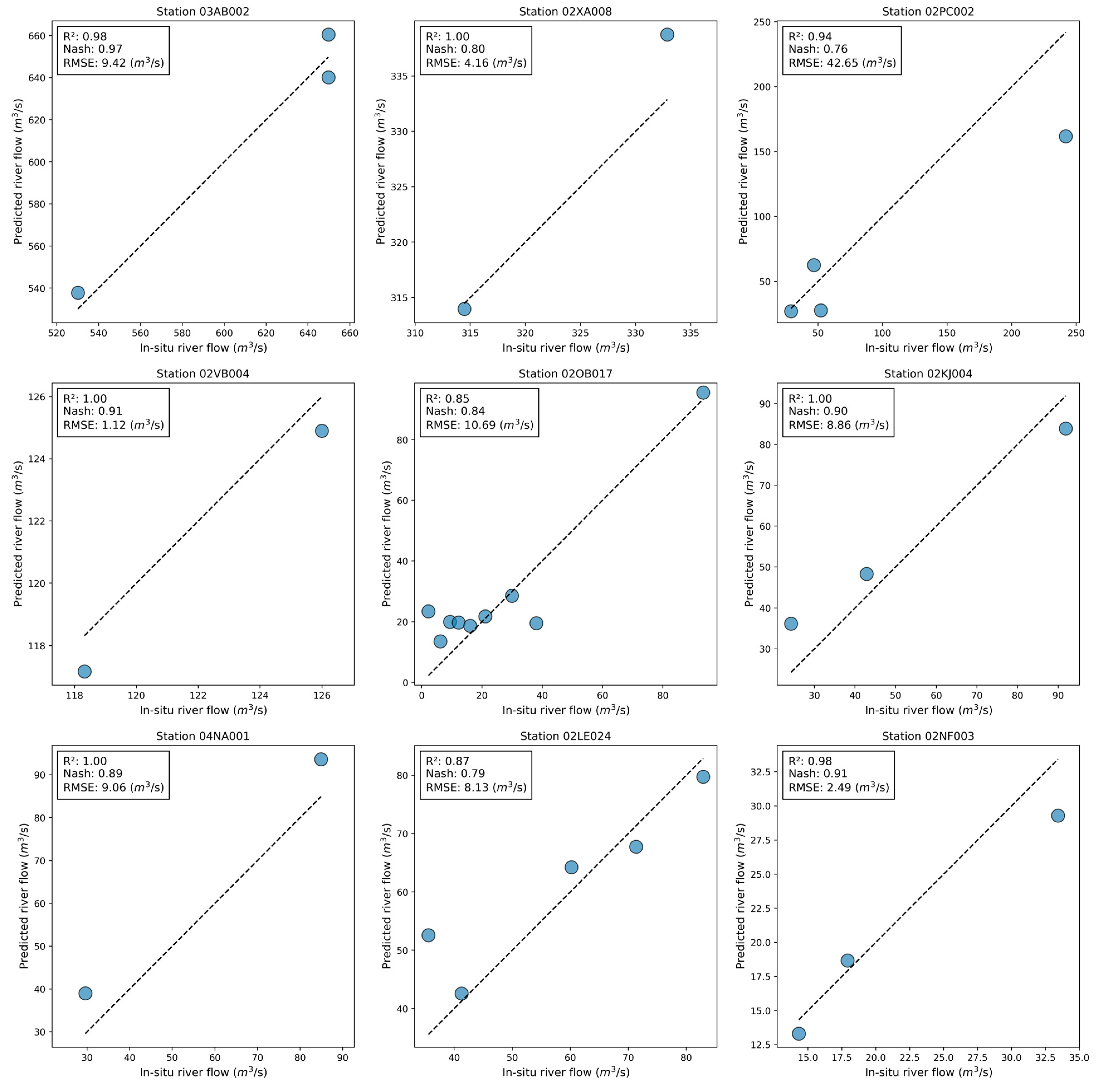
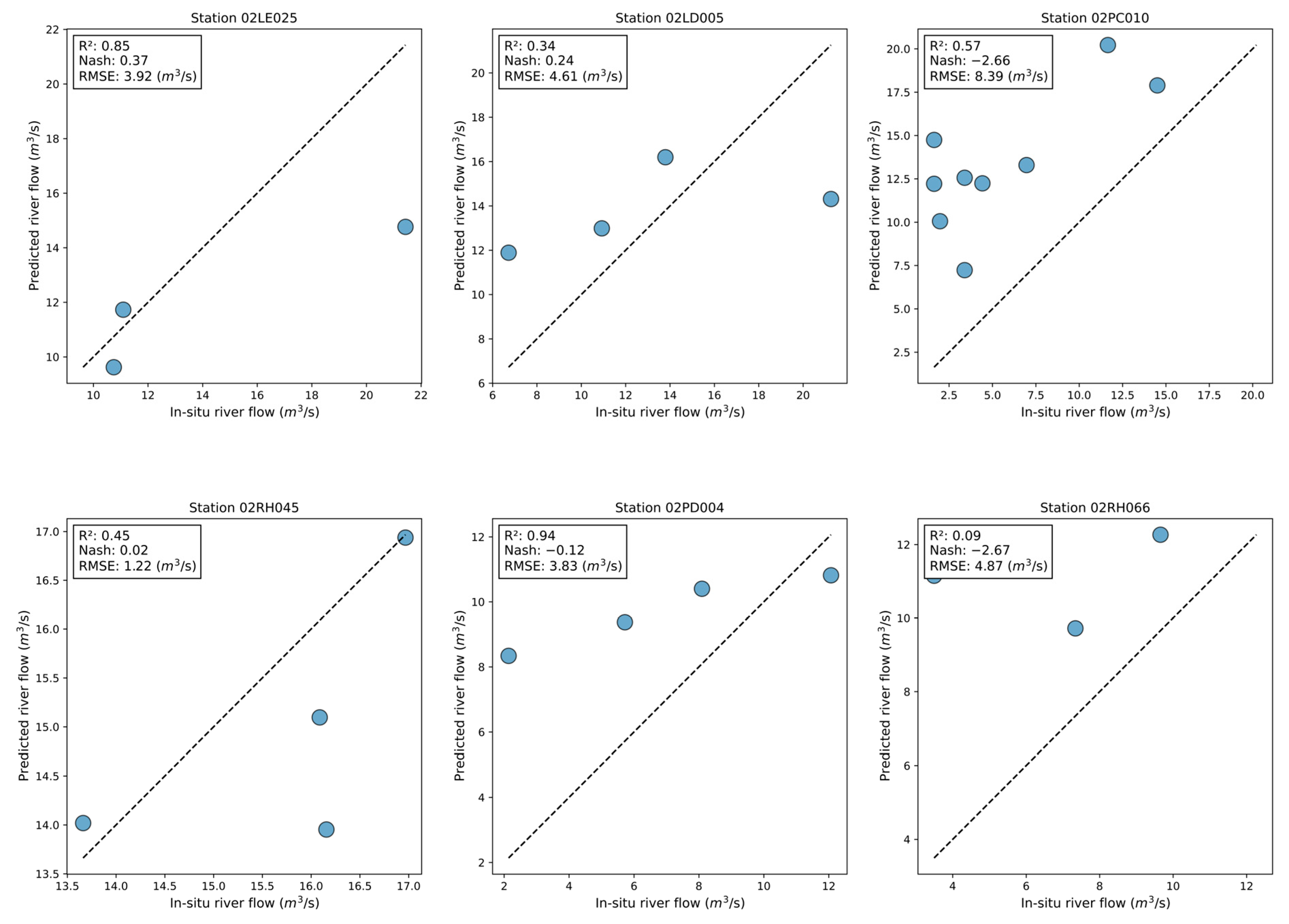
4.3. Analysis by Individual Stations of the Flow Estimate
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | ID | Latitude Degree | Longitude Degree | Width of the River at the Station (in m) | Catchment Area (km2) | No. of RS-1 and RS-2 Images | Avg. Min. Flow (30-Yr) | Avg. Max. Flow (30-Yr) | Avg. Mean Flow (30-Yr) |
|---|---|---|---|---|---|---|---|---|---|
| 02JB009 | 1 | 47.843861 | −77.5487 | 93.282 | 10,300 | 1 | 53.446 | 337.42 | 186.78 |
| 02KJ004 | 2 | 46.346389 | −77.8157 | 60.122 | 3760 | 19 | 15.206 | 203.915 | 51.359 |
| 02LC021 | 3 | 46.046419 | −74.2525 | 15.851 | 311 | 22 | 1.196 | 16.472 | 6.920 |
| 02LD005 | 4 | 45.791283 | −75.0911 | 18.761 | 1330 | 19 | 4.521 | 91.312 | 22.215 |
| 02LE024 | 5 | 46.785028 | −75.3116 | 82.244 | 4530 | 37 | 28.370 | 324.296 | 83.119 |
| 02LE025 | 6 | 46.650306 | −75.247 | 96.787 | 883 | 37 | 4.511 | 31.968 | 16.565 |
| 02LG005 | 7 | 47.08325 | −75.7535 | 127.824 | 6840 | 24 | 25.125 | 839.742 | 124.105 |
| 02ND003 | 8 | 47.676972 | −73.0408 | 82.060 | 2640 | 10 | 9.703 | 225.541 | 39.844 |
| 02NE011 | 9 | 47.7685 | −72.7349 | 76.265 | 1570 | 9 | 6.566 | 233.452 | 29.872 |
| 02NF003 | 10 | 46.683578 | −73.9136 | 70 | 1390 | 32 | 5.294 | 143.558 | 24.436 |
| 02OB017 | 11 | 46.030694 | −73.7049 | 42.482 | 1270 | 29 | 3.384 | 216.597 | 26.226 |
| 02OC021 | 12 | 46.441667 | −73.4619 | 33.683 | 186 | 22 | 0.231 | 41.433 | 4.007 |
| 02PC002 | 13 | 46.8925 | −71.5261 | 62.304 | 2010 | 19 | 13.765 | 480.543 | 61.348 |
| 02PC010 | 14 | 46.8675 | −71.6372 | 20.460 | 213 | 21 | 1.384 | 49.294 | 6.693 |
| 02PD004 | 15 | 47.260028 | −71.1372 | 22.443 | 269 | 19 | 1.776 | 94.666 | 8.661 |
| 02RB004 | 16 | 49.881426 | −70.9261 | 69.459 | 1955 | 10 | 16.579 | 547.727 | 81.990 |
| 02RH027 | 17 | 47.941861 | −71.3822 | 36.566 | 495 | 26 | 2.533 | 94.962 | 12.973 |
| 02RH035 | 18 | 48.182694 | −71.6448 | 84.877 | 1110 | 14 | 5.535 | 184.317 | 27.927 |
| 02RH045 | 19 | 48.487944 | −70.9722 | 37.855 | 746 | 21 | 3.794 | 169.656 | 23.437 |
| 02RH066 | 20 | 48.235944 | −71.2885 | 31.757 | 355 | 21 | 1.479 | 63.107 | 7.901 |
| 02UC002 | 21 | 50.3525 | −66.1867 | 117.467 | 19,000 | 4 | 77.748 | 2216.428 | 413.309 |
| 02VB004 | 22 | 50.685556 | −64.5786 | 346.920 | 7230 | 4 | 33.559 | 871.608 | 165.695 |
| 02VC001 | 23 | 50.307778 | −63.6186 | 125 | 13,000 | 4 | 60.672 | 1545.730 | 293.547 |
| 02WB003 | 24 | 50.4275 | −61.7122 | 431.483 | 15,600 | 7 | 74.358 | 1670.100 | 343.225 |
| 02XA003 | 25 | 52.22981 | −61.31694 | 122.143 | 4540 | 5 | 15.997 | 653.1842 | 93.968 |
| 02XA008 | 26 | 50.680833 | −59.6019 | 139.106 | 19,200 | 7 | 86.792 | 2301.538 | 450.500 |
| 02YC001 | 27 | 50.60747 | −57.15161 | 21.290 | 624 | 3 | 3.776 | 177.732 | 24.808 |
| 02YD002 | 28 | 50.92442 | −56.11169 | 34.109 | 200 | 21 | 0.385 | 39.335 | 5.5110 |
| 02YO011 | 29 | 48.84439 | −56.26967 | 200 | 6300 | 9 | 88.733 | 748.090 | 190.090 |
| 02YQ001 | 30 | 49.01628 | −54.85067 | 109.013 | 4450 | 20 | 21.445 | 595.441 | 121.282 |
| 02YS005 | 31 | 48.66275 | −54.01525 | 77.379 | 2000 | 41 | 16.424 | 233.442 | 50.240 |
| 02ZE004 | 32 | 48.16875 | −55.48281 | 31.642 | 99.5 | 8 | 0.186 | 38.983 | 3.352 |
| 03AB002 | 33 | 49.8575 | −77.1872 | 85 | 31,291 | 14 | 157.117 | 1491.910 | 588.600 |
| 03BD002 | 34 | 50.745806 | −76.3872 | 387.963 | 9684 | 3 | 52.984 | 482.730 | 175.230 |
| 03BF001 | 35 | 51.533583 | −78.0966 | 194.305 | 6020 | 5 | 13.898 | 57.428 | 99.153 |
| 03OE001 | 36 | 53.24831 | −60.78511 | 318.658 | 92,500 | 5 | 912.114 | 4509.83 | 1750.327 |
| 03QC001 | 37 | 53.53428 | −57.49386 | 287.417 | 10,900 | 5 | 29.908 | 1790.551 | 255.693 |
| 03QC002 | 38 | 52.64861 | −56.87122 | 82.297 | 2310 | 3 | 5.516 | 501.658 | 52.482 |
| 04NA001 | 39 | 48.59775 | −78.1102 | 94 | 3680 | 20 | 184.347 | 14.488 | 59.174 |
| Layers | Output Shape |
|---|---|
| conv2d_input | (140,140,2) |
| conv2d | (138,138,128) |
| conv2d_1 | (136,136,128) |
| average_pooling2d | (67,67,128) |
| conv2d_2 | (65,65,128) |
| conv2d_3 | (63,63,128) |
| average_pooling2d_1 | (31,31,128) |
| conv2d_4 | (29,29,256) |
| conv2d_5 | (27,27,256) |
| Dropout | (27,27,256) |
| average_pooling2d_2 | (13,13,256) |
| conv2d_6 | (11,11,512) |
| global_average_pooling2d | (512) |
| dropout_1 | (512) |
| Dense | (512) |
| dropout_2 | (512) |
| Dense_1 | (1) |
| Hyper-Parameter Name | Hyper-Parameter Value |
|---|---|
| Learning rate | 1 × 10−4 |
| Optimizer | Adam |
| Loss function | MSE |
| Batch size | 16 |
| Epoch | 50 |
| Size of filter | 3 |
References
- Barbetta, S.; Franchini, M.; Melone, F.; Moramarco, T. Enhancement and comprehensive evaluation of the Rating Curve Model for different river sites. J. Hydrol. 2012, 464–465, 376–387. [Google Scholar] [CrossRef]
- Dottori, F.; Martina, M.L.V.; Todini, E. A dynamic rating curve approach to indirect discharge measurement. Hydrol. Earth Syst. Sci. 2009, 13, 847–863. [Google Scholar] [CrossRef]
- Guerrero, J.-L.; Westerberg, I.K.; Halldin, S.; Xu, C.-Y.; Lundin, L.-C. Temporal variability in stage-discharge relationships. J. Hydrol. 2012, 446–447, 90–102. [Google Scholar] [CrossRef]
- Smith, L.C.; Pavelsky, T.M. Estimation of river discharge, propagation speed, and hydraulic geometry from space: Lena River, Siberia. Water Resour. Res. 2008, 44, W03427. [Google Scholar] [CrossRef]
- Dai, A.; Trenberth, K.E. Estimates of Freshwater Discharge from Continents: Latitudinal and Seasonal Variations. J. Hydrometeorol. 2002, 3, 660–687. [Google Scholar] [CrossRef]
- Chokmani, K.; Perreault, S.; Jacome, A.; Bernier, M.; Poulin, J.; Gauthier, Y. Développement d’une Méthodologie D’estimation du Débit en Rivière pour les Sites Non-Jaugés à l'aide de L'imagerie RADARSAT dans l'est du Canada; Rapport Technique R1683; Institut National de la Recherche Scientifique: Quebec, QC, Canada, 2015; ISBN 978-2-89146-867-1. [Google Scholar]
- Bjerklie, D.M.; Dingman, S.L.; Vorosmarty, C.J.; Bolster, C.H.; Congalton, R.G. Evaluating the potential for measuring river discharge from space. J. Hydrol. 2003, 278, 17–38. [Google Scholar] [CrossRef]
- Di Baldassarre, G.; Uhlenbrook, S. Is the Current Flood of Data Enough? A Treatise on Research Needs for the Improvement of Flood Modelling. Hydrol. Process. 2012, 26, 153–158. [Google Scholar] [CrossRef]
- Feng, D.; Gleason, C.J.; Yang, X.; Pavelsky, T.M. Comparing Discharge Estimates Made via the BAM Algorithm in High-Order Arctic Rivers Derived Solely from Optical CubeSat, Landsat, and Sentinel-2 Data. Water Resour. Res. 2019, 55, 7753–7771. [Google Scholar] [CrossRef]
- Gleason, C.J.; Wada, Y.; Wang, J. A Hybrid of Optical Remote Sensing and Hydrological Modeling Improves Water Balance Estimation. J. Adv. Model. Earth Syst. 2018, 10, 2–17. [Google Scholar] [CrossRef]
- Hossain, F.; Siddique-E-Akbor, A.H.; Mazumder, L.C.; ShahNewaz, S.M.; Biancamaria, S.; Lee, H.; Shum, C.K. Proof of Concept of an Altimeter-Based River Forecasting System for Transboundary Flow Inside Bangladesh. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2013, 7, 587–601. [Google Scholar] [CrossRef]
- Tourian, M.; Schwatke, C.; Sneeuw, N. River discharge estimation at daily resolution from satellite altimetry over an entire river basin. J. Hydrol. 2017, 546, 230–247. [Google Scholar] [CrossRef]
- Tramblay, Y.; Ouarda, T.B.; St-Hilaire, A.; Poulin, J. Regional estimation of extreme suspended sediment concentrations using watershed characteristics. J. Hydrol. 2010, 380, 305–317. [Google Scholar] [CrossRef]
- Ahmad, W.; Kim, D. Estimation of flow in various sizes of streams using the Sentinel-1 Synthetic Aperture Radar (SAR) data in Han River Basin, Korea. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101930. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Lettenmaier, D.P. Tracking Fresh Water from Space. Science 2003, 301, 1491–1494. [Google Scholar] [CrossRef] [PubMed]
- Huang, Q.; Long, D.; Du, M.; Zeng, C.; Qiao, G.; Li, X.; Hou, A.; Hong, Y. Discharge estimation in high-mountain regions with improved methods using multisource remote sensing: A case study of the Upper Brahmaputra River. Remote. Sens. Environ. 2018, 219, 115–134. [Google Scholar] [CrossRef]
- Koblinsky, C.J.; Clarke, R.T.; Brenner, A.C.; Frey, H. Measurement of River Level Variations with Satellite Altimetry; Wiley Online Library: Hoboken, NJ, USA, 1993. [Google Scholar]
- Syed, T.H.; Famiglietti, J.S.; Chambers, D.P.; Willis, J.K.; Hilburn, K. Satellite-based global-ocean mass balance estimates of interannual variability and emerging trends in continental freshwater discharge. Proc. Natl. Acad. Sci. USA 2010, 107, 17916–17921. [Google Scholar] [CrossRef]
- Smith, L.C. Satellite Remote Sensing of River Inundation Area, Stage, and Discharge: A Review. Hydrol. Process. 1997, 11, 1427–1439. [Google Scholar] [CrossRef]
- Pan, F.; Wang, C.; Xi, X. Constructing river stage-discharge rating curves using remotely sensed river cross-sectional inundation areas and river bathymetry. J. Hydrol. 2016, 540, 670–687. [Google Scholar] [CrossRef]
- Pan, F.; Nichols, J. Remote sensing of river stage using the cross-sectional inundation area-river stage relationship (IARSR) constructed from digital elevation model data. Hydrol. Process. 2013, 27, 3596–3606. [Google Scholar] [CrossRef]
- Sichangi, A.W.; Wang, L.; Yang, K.; Chen, D.; Wang, Z.; Li, X.; Zhou, J.; Liu, W.; Kuria, D.; Naturvetenskapliga, F.; et al. Estimating continental river basin discharges using multiple remote sensing data sets. Remote Sens. Environ. 2016, 179, 36–53. [Google Scholar] [CrossRef]
- Sichangi, A.W.; Wang, L.; Hu, Z. Estimation of River Discharge Solely from Remote-Sensing Derived Data: An Initial Study Over the Yangtze River. Remote. Sens. 2018, 10, 1385. [Google Scholar] [CrossRef]
- Birkett, C.M.; Mertes, L.A.K.; Dunne, T.; Costa, M.H.; Jasinski, M.J. Surface water dynamics in the Amazon Basin: Application of satellite radar altimetry. J. Geophys. Res. Atmos. 2002, 107, LBA 26-1–LBA 26-21. [Google Scholar] [CrossRef]
- Kouraev, A.V.; Zakharova, E.A.; Samain, O.; Mognard, N.M.; Cazenave, A. Ob’ river discharge from TOPEX/Poseidon satellite altimetry (1992–2002). Remote. Sens. Environ. 2004, 93, 238–245. [Google Scholar] [CrossRef]
- Nathanson, M.; Kean, J.W.; Grabs, T.J.; Seibert, J.; Laudon, H.; Lyon, S.W. Modelling rating curves using remotely sensed LiDAR data. Hydrol. Process. 2012, 26, 1427–1434. [Google Scholar] [CrossRef]
- Paris, A.; de Paiva, R.D.; da Silva, J.S.; Moreira, D.M.; Calmant, S.; Garambois, P.; Collischonn, W.; Bonnet, M.; Seyler, F. Stage-discharge rating curves based on satellite altimetry and modeled discharge in the Amazon basin. Water Resour. Res. 2016, 52, 3787–3814. [Google Scholar] [CrossRef]
- Pavelsky, T.M.; Durand, M.T.; Andreadis, K.M.; Beighley, R.E.; Paiva, R.C.; Allen, G.H.; Miller, Z.F. Assessing the potential global extent of SWOT river discharge observations. J. Hydrol. 2014, 519, 1516–1525. [Google Scholar] [CrossRef]
- Schneider, R.; Godiksen, P.N.; Villadsen, H.; Madsen, H.; Bauer-Gottwein, P. Application of CryoSat-2 altimetry data for river analysis and modelling. Hydrol. Earth Syst. Sci. 2017, 21, 751–764. [Google Scholar] [CrossRef]
- Biancamaria, S.; Andreadis, K.M.; Durand, M.; Clark, E.A.; Rodriguez, E.; Mognard, N.M.; Alsdorf, D.E.; Lettenmaier, D.P.; Oudin, Y. Preliminary Characterization of SWOT Hydrology Error Budget and Global Capabilities. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2009, 3, 6–19. [Google Scholar] [CrossRef]
- Gehring, J.; Duvvuri, B.; Beighley, E. Deriving River Discharge Using Remotely Sensed Water Surface Characteristics and Satellite Altimetry in the Mississippi River Basin. Remote. Sens. 2022, 14, 3541. [Google Scholar] [CrossRef]
- Amaral, F.R.D.; Pellarin, T.; Trung, T.N.; Tu, T.A.; Gratiot, N. Enhancing discharge estimation from SWOT satellite data in a tropical tidal river environment. PLoS Water 2024, 3, e0000226. [Google Scholar] [CrossRef]
- Huang, Q.; Long, D.; Han, Z.; Han, P. High-resolution satellite images combined with hydrological modeling derive river discharge for headwaters: A step toward discharge estimation in ungauged basins. Remote. Sens. Environ. 2022, 277, 113030. [Google Scholar] [CrossRef]
- Masafu, C.; Williams, R.; Hurst, M.D. Satellite Video Remote Sensing for Estimation of River Discharge. Geophys. Res. Lett. 2023, 50, e2023GL105839. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; Moore, P.; Kilsby, C.G.; O’Donnell, G.M.; Hardy, A.J.; Berry, P.A.M. Daily discharge estimation at ungauged river sites using remote sensing. Hydrol. Process 2014, 28, 1043–1054. [Google Scholar] [CrossRef]
- Durand, M.; Gleason, C.J.; Garambois, P.A.; Bjerklie, D.; Smith, L.C.; Roux, H.; Rodriguez, E.; Bates, P.D.; Pavelsky, T.M.; Monnier, J.; et al. An intercomparison of remote sensing river discharge estimation algorithms from measurements of river height, width, and slope. Water Resour. Res. 2016, 52, 4527–4549. [Google Scholar] [CrossRef]
- Fulton, J.; Anderson, I.; Chiu, C.-L.; Sommer, W.; Adams, J.; Moramarco, T.; Bjerklie, D.; Fulford, J.; Sloan, J.; Best, H.; et al. QCam: sUAS-Based Doppler Radar for Measuring River Discharge. Remote Sens. 2020, 12, 3317. [Google Scholar] [CrossRef]
- Smith, L.C.; Isacks, B.L.; Bloom, A.L.; Murray, A.B. Estimation of Discharge From Three Braided Rivers Using Synthetic Aperture Radar Satellite Imagery: Potential Application to Ungaged Basins. Water Resour. Res. 1996, 32, 2021–2034. [Google Scholar] [CrossRef]
- Yaseen, Z.M.; El-Shafie, A.; Jaafar, O.; Afan, H.A.; Sayl, K.N. Artificial intelligence based models for stream-flow forecasting: 2000–2015. J. Hydrol. 2015, 530, 829–844. [Google Scholar] [CrossRef]
- Chang, F.-J.; Chen, P.-A.; Lu, Y.-R.; Huang, E.; Chang, K.-Y. Real-time multi-step-ahead water level forecasting by recurrent neural networks for urban flood control. J. Hydrol. 2014, 517, 836–846. [Google Scholar] [CrossRef]
- Üneş, F.; Demirci, M.; Zelenakova, M.; Çalışıcı, M.; Taşar, B.; Vranay, F.; Kaya, Y.Z. River Flow Estimation Using Artificial Intelligence and Fuzzy Techniques. Water 2020, 12, 2427. [Google Scholar] [CrossRef]
- Nourani, V. An Emotional ANN (EANN) approach to modeling rainfall-runoff process. J. Hydrol. 2017, 544, 267–277. [Google Scholar] [CrossRef]
- Ansari, S.; Rennie, C.D.; Jamieson, E.C.; Seidou, O.; Clark, S.P. RivQNet: Deep Learning Based River Discharge Estimation Using Close-Range Water Surface Imagery. Water Resour. Res. 2023, 59, e2021WR031841. [Google Scholar] [CrossRef]
- Shen, C. A Transdisciplinary Review of Deep Learning Research and Its Relevance for Water Resources Scientists. Water Resour. Res. 2018, 54, 8558–8593. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Fang, Q.; Zhang, J.; Xie, C.; Yang, Y. Detection of multiple leakage points in water distribution networks based on convolutional neural networks. Water Supply 2019, 19, 2231–2239. [Google Scholar] [CrossRef]
- Zhou, X.; Tang, Z.; Xu, W.; Meng, F.; Chu, X.; Xin, K.; Fu, G. Deep learning identifies accurate burst locations in water distribution networks. Water Res. 2019, 166, 115058. [Google Scholar] [CrossRef] [PubMed]
- Barzegar, R.; Aalami, M.T.; Adamowski, J. Short-term water quality variable prediction using a hybrid CNN-LSTM deep learning model. Stoch. Environ. Res. Risk Assess. 2020, 34, 415–433. [Google Scholar] [CrossRef]
- Liu, P.; Wang, J.; Sangaiah, A.K.; Xie, Y.; Yin, X. Analysis and Prediction of Water Quality Using LSTM Deep Neural Networks in IoT Environment. Sustainability 2019, 11, 2058. [Google Scholar] [CrossRef]
- Damavandi, H.G.; Shah, R.; Stampoulis, D.; Wei, Y.; Boscovic, D.; Sabo, J. Accurate Prediction of Streamflow Using Long Short-Term Memory Network: A Case Study in the Brazos River Basin in Texas. Int. J. Environ. Sci. Dev. 2019, 10, 294–300. [Google Scholar] [CrossRef]
- Kratzert, F.; Klotz, D.; Herrnegger, M.; Sampson, A.K.; Hochreiter, S.; Nearing, G.S. Toward Improved Predictions in Ungauged Basins: Exploiting the Power of Machine Learning. Water Resour. Res. 2019, 55, 11344–11354. [Google Scholar] [CrossRef]
- Hrnjica, B.; Bonacci, O. Lake Level Prediction using Feed Forward and Recurrent Neural Networks. Water Resour. Manag. 2019, 33, 2471–2484. [Google Scholar] [CrossRef]
- Ling, F.; Boyd, D.; Ge, Y.; Foody, G.M.; Li, X.; Wang, L.; Zhang, Y.; Shi, L.; Shang, C.; Li, X.; et al. Measuring River Wetted Width From Remotely Sensed Imagery at the Subpixel Scale With a Deep Convolutional Neural Network. Water Resour. Res. 2019, 55, 5631–5649. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A.; Bengio, Y. Deep Learning; MIT Press Cambridge: Cambridge, MA, USA, 2016; Volume 1. [Google Scholar]
- Saba, L.; Biswas, M.; Kuppili, V.; Godia, E.C.; Suri, H.S.; Edla, D.R.; Omerzu, T.; Laird, J.R.; Khanna, N.N.; Mavrogeni, S.; et al. The present and future of deep learning in radiology. Eur. J. Radiol. 2019, 114, 14–24. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, S.; Basak, S.; Saikia, P.; Paul, S.; Tsalavoutis, V.; Atiah, F.; Ravi, V.; Peters, A. A review of deep learning with special emphasis on architectures, applications and recent trends. Knowl. Based Syst. 2020, 194, 105596. [Google Scholar] [CrossRef]
- Sahiner, B.; Pezeshk, A.; Hadjiiski, L.M.; Wang, X.; Drukker, K.; Cha, K.H.; Summers, R.M.; Giger, M.L. Deep learning in medical imaging and radiation therapy. Med. Phys. 2019, 46, e1–e36. [Google Scholar] [CrossRef] [PubMed]
- Eamer, J. Boreal Shield and Newfoundland Boreal Ecozones+ Evidence for Key Findings Summary. 2015. Available online: https://policycommons.net/artifacts/1933280/boreal-shield-and-newfoundland-boreal-ecozones-evidence-for-key-findings-summary/2685049/ (accessed on 17 May 2024).
- Colombo, S.J.; Cherry, M.L.; Graham, C.; Greifenhagen, S.; McAlpine, R.S.; Papadopol, C.S.; Parker, W.C.; Scarr, T.; Ter-Mikaelian, M.T.; Flannigan, M.D. The Impacts of Climate Change on Ontarios Forests; Ontario Ministry of Natural Resources, Ontario Forest Research Institute: Sault Ste. Marie, ON, Canada, 1998. [Google Scholar]
- Lowe, J.J.; Power, K.; Marsan, M.W. Inventaire Des Forêts Du Canada 1991: Sommaire Par Écorégion et Par Écozone Terrestres. 1996. Ressources naturelles Canada, Service canadien des forêts, Centre de foresterie du Pacifique, Victoria CB. Rapport d’information BC-X-364F. Volume 364. Available online: https://ostrnrcan-dostrncan.canada.ca/handle/1845/232105 (accessed on 17 May 2024).
- Les gouvernements fédéral, provinciaux et territoriaux du C. Biodiversité Canadienne: État et Tendances Des Écosystèmes En 2010; Conseils Canadiens des Ministres des Ressources: Ottawa, ON, Canada, 2010; 148, p. 148. ISBN 978-1-100-95807-1. Available online: https://www.biodivcanada.ca/rapports/biodiversite-canadienne-etat-et-tendances-des-ecosystemes-en-2010 (accessed on 17 May 2024).
- Huang, C.; Nguyen, B.D.; Zhang, S.; Cao, S.; Wagner, W. A Comparison of Terrain Indices toward Their Ability in Assisting Surface Water Mapping from Sentinel-1 Data. ISPRS Int. J. Geo-Inf. 2017, 6, 140. [Google Scholar] [CrossRef]
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef]
- Simard, P.Y.; Steinkraus, D.; Platt, J.C. Best practices for convolutional neural networks applied to visual document analysis. In Proceedings of the 7th International Conference on Document Analysis and Recognition, ICDAR, Edinburgh, UK, 3–6 August 2003; pp. 958–962. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Internal Representations by Error Propagation; California Univ San Diego La Jolla Inst for Cognitive Science: La Jolla, CA, USA, 1985. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization 2017. arXiv 2017, arXiv:1412.6980. [Google Scholar]
- Anwar, S.; Hwang, K.; Sung, W. Structured Pruning of Deep Convolutional Neural Networks. ACM J. Emerg. Technol. Comput. Syst. (JETC) 2017, 13, 1–18. [Google Scholar] [CrossRef]
- Nagi, J.; Ducatelle, F.; Di Caro, G.A.; Cireşan, D.; Meier, U.; Giusti, A.; Nagi, F.; Schmidhuber, J.; Gambardella, L.M. Max-Pooling Convolutional Neural Networks for Vision-Based Hand Gesture Recognition. In Proceedings of the 2011 IEEE international conference on signal and image processing applications (ICSIPA), Kuala Lumpur, Malaysia, 16–18 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 342–347. [Google Scholar]
- Wu, J.-N. Compression of Fully-Connected Layer in Neural Network by Kronecker Product. In Proceedings of the 2016 Eighth International Conference on Advanced Computational Intelligence (ICACI), Chiang Mai, Thailand, 14–16 February 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 173–179. [Google Scholar]
- Brown, M.J.; Hutchinson, L.A.; Rainbow, M.J.; Deluzio, K.J.; De Asha, A.R. A Comparison of Self-Selected Walking Speeds and Walking Speed Variability When Data Are Collected During Repeated Discrete Trials and During Continuous Walking. J. Appl. Biomech. 2017, 33, 384–387. [Google Scholar] [CrossRef] [PubMed]
- Al-Sabaawi, A.; Ibrahim, H.M.; Arkah, Z.M.; Al-Amidie, M.; Alzubaidi, L. Amended Convolutional Neural Network with Global Average Pooling for Image Classification. In Proceedings of the International Conference on Intelligent Systems Design and Applications, Online, 13–15 December 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 171–180. [Google Scholar]
- Khan, S.; Rahmani, H.; Shah, S.A.A.; Bennamoun, M. A Guide to Convolutional Neural Networks for Computer Vision. Synth. Lect. Comput. Vis. 2018, 8, 1–207. [Google Scholar] [CrossRef]
- Sewak, M.; Karim, M.R.; Pujari, P. Practical Convolutional Neural Networks: Implement Advanced Deep Learning Models Using Python; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Smith, L.N. A Disciplined Approach to Neural Network Hyper-Parameters: Part 1—Learning Rate, Batch Size, Momentum, and Weight Decay. arXiv 2018, arXiv:1803.09820. [Google Scholar]
- Gulli, A.; Kapoor, A.; Pal, S. Deep Learning with TensorFlow 2 and Keras: Regression, ConvNets, GANs, RNNs, NLP, and More with TensorFlow 2 and the Keras API; Packt Publishing Ltd.: Birmingham, UK, 2019. [Google Scholar]
- Nash, J.E.; Sutcliffe, J.V. River Flow Forecasting through Conceptual Models Part I—A Discussion of Principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Smith, L.C.; Isacks, B.L.; Forster, R.R.; Bloom, A.L.; Preuss, I. Estimation of discharge from braided glacial rivers using ERS-1 Synthetic—Aperture Radar—First results. Water Resour. Res. 1995, 31, 1325–1329. [Google Scholar] [CrossRef]
- Moody, J.A.; Troutman, B.M. Characterization of the Spatial Variability of Channel Morphology. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2002, 27, 1251–1266. [Google Scholar] [CrossRef]
- Schubert, J.E.; Monsen, W.W.; Sanders, B.F. Metric-Resolution 2D River Modeling at the Macroscale: Computational Methods and Applications in a Braided River. Front. Earth Sci. 2015, 3, 74. [Google Scholar] [CrossRef]
- Herschy, R. The uncertainty in a current meter measurement. Flow Meas. Instrum. 2002, 13, 281–284. [Google Scholar] [CrossRef]
- Leonard, J.; Mietton, M.; Najib, H.; Gourbesville, P. Rating curve modelling with Manning’s equation to manage instability and improve extrapolation. Hydrol. Sci. J. 2000, 45, 739–750. [Google Scholar] [CrossRef]
- Pelletier, P.M. Uncertainties in the single determination of river discharge: A literature review. Can. J. Civ. Eng. 1988, 15, 834–850. [Google Scholar] [CrossRef]
- Peña-Arancibia, J.L.; Zhang, Y.; Pagendam, D.E.; Viney, N.R.; Lerat, J.; van Dijk, A.I.; Vaze, J.; Frost, A.J. Streamflow rating uncertainty: Characterisation and impacts on model calibration and performance. Environ. Model. Softw. 2015, 63, 32–44. [Google Scholar] [CrossRef]
- Tomkins, K.M. Uncertainty in streamflow rating curves: Methods, controls and consequences. Hydrol. Process. 2012, 28, 464–481. [Google Scholar] [CrossRef]
- Pristyanto, Y.; Adi, S.; Sunyoto, A. The Effect of Feature Selection on Classification Algorithms in Credit Approval. In Proceedings of the 2019 International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 24–25 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 451–456. [Google Scholar]
- Li, J.; Cheng, K.; Wang, S.; Morstatter, F.; Trevino, R.P.; Tang, J.; Liu, H. Feature Selection: A Data Perspective. ACM Comput. Surv. (CSUR) 2017, 50, 1–45. [Google Scholar] [CrossRef]
- Mengen, D.; Ottinger, M.; Leinenkugel, P.; Ribbe, L. Modeling River Discharge Using Automated River Width Measurements Derived from Sentinel-1 Time Series. Remote. Sens. 2020, 12, 3236. [Google Scholar] [CrossRef]
- Tate, E.C.; Maidment, D.R.; Olivera, F.; Anderson, D.J. Creating a Terrain Model for Floodplain Mapping. J. Hydrol. Eng. 2002, 7, 100–108. [Google Scholar] [CrossRef]

| Range of Values at the Stations | Width of River at Station (in m) | Catchment Area (km2) | Instantaneous River Flow m3/s |
|---|---|---|---|
| Minimum | 16.0 | 99.0 | 0.1 |
| Mean | 112.0 | 7456.0 | 80.0 |
| Maximum | 431.0 | 92,500.0 | 750.0 |
| Standard deviation (SD) | 105.0 | 15,497.0 | 120.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziadi, S.; Chokmani, K.; Chaabani, C.; El Alem, A. Deep Learning-Based Automatic River Flow Estimation Using RADARSAT Imagery. Remote Sens. 2024, 16, 1808. https://doi.org/10.3390/rs16101808
Ziadi S, Chokmani K, Chaabani C, El Alem A. Deep Learning-Based Automatic River Flow Estimation Using RADARSAT Imagery. Remote Sensing. 2024; 16(10):1808. https://doi.org/10.3390/rs16101808
Chicago/Turabian StyleZiadi, Samar, Karem Chokmani, Chayma Chaabani, and Anas El Alem. 2024. "Deep Learning-Based Automatic River Flow Estimation Using RADARSAT Imagery" Remote Sensing 16, no. 10: 1808. https://doi.org/10.3390/rs16101808
APA StyleZiadi, S., Chokmani, K., Chaabani, C., & El Alem, A. (2024). Deep Learning-Based Automatic River Flow Estimation Using RADARSAT Imagery. Remote Sensing, 16(10), 1808. https://doi.org/10.3390/rs16101808