
Envelope Extraction Algorithm for Magnetic Resonance Sounding Signals Based on Adaptive Gaussian Filters


Abstract
1. Introduction
2. Principles and Methods
2.1. Magnetic Resonance Soundings Principles
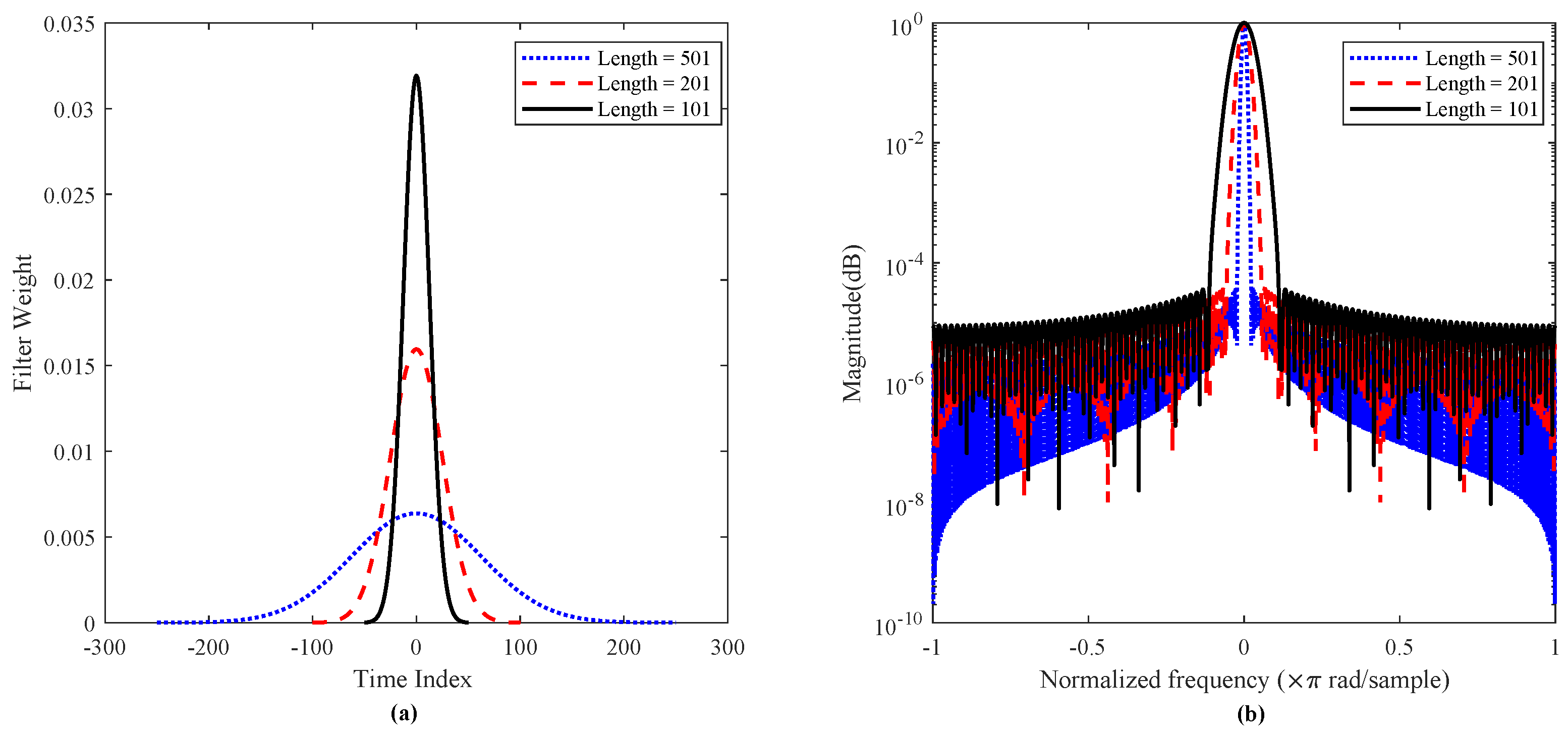
2.2. Principles of Adaptive Gaussian Filters
- Firstly, determine the parameter M for the adaptive Gaussian filter. This parameter is closely related to the length L of the Gaussian filter, where , and denotes the floor function.In (4), the parameter ranges between 1.0 and 3.0, N represents the length of the signal , and denotes the number of extremal points in the signal.
- The signal is extended at its endpoints using a combination of the “constant”, “periodic”, “mirroring”, and “bidirectional symmetric mirroring” methods. The choice of extension method depends on the characteristics of the signal to be processed, obtaining the extended signal .
- For the extended signal , smoothing filtering is applied using the Gaussian filter from (3). This process obtains the instantaneous mean signal:
- Determination of IMF components based on (6), and the stopping criterion for sifting satisfies (7), where the value of is greater than 20 [27]. If this condition is met, the decomposition stops; otherwise, the process is repeated from steps 1 to 4.In this context, represents the ith IMF component.
3. Results
3.1. Implementation of the Gaussian Filter Algorithm
3.2. Selection of Algorithm Parameters
3.3. Comparison with Other Algorithms
3.4. Processing of Field Data
4. Discussion
4.1. Performance Analysis of the Algorithm under Different Conditions
4.1.1. Investigation of Denoising Effectiveness under Different Signal-to-Noise Ratios
4.1.2. Investigation of Denoising Effectiveness under Different Relaxation Times
4.1.3. Investigation of Denoising Effectiveness under Different Larmor Frequencies
4.1.4. Impact of Varying Noise Amplitudes on the Adaptive Gaussian Filter Algorithm
4.2. Comparison of Simulation Data and Discussion of Field Data Processing Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hertrich, M. Imaging of groundwater with nuclear magnetic resonance. Prog. Nucl. Magn. Reson. Spectrosc. 2008, 53, 227–248. [Google Scholar] [CrossRef]
- Legchenko, A.; Baltassat, J.M.; Beauce, A.; Bernard, J. Nuclear magnetic resonance as a geophysical tool for hydrogeologists. J. Appl. Geophys. 2002, 50, 21–46. [Google Scholar] [CrossRef]
- Behroozmand, A.A.; Keating, K.; Auken, E. A review of the principles and applications of the NMR technique for near-surface characterization. Surv. Geophys. 2015, 36, 27–85. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, Z.; Li, B.; Lin, T.; Shang, X.; Diao, S.; Du, G.; Yi, X.; Lin, J. A Rotational Measurement Scheme of Surface Nuclear Magnetic Resonance for Shallow Frozen Lake Characterization in Urban Environments. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5902512. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, K.; Zhao, H.; Lin, T. Modeling of Surface Nuclear Magnetic Resonance Based on Prepolarization and Its Application in Urban Shallow Measurements. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5916910. [Google Scholar] [CrossRef]
- Lesparre, N.; Girard, J.F.; Jeannot, B.; Weill, S.; Dumont, M.; Boucher, M.; Viville, D.; Pierret, M.C.; Legchenko, A.; Delay, F. Magnetic resonance sounding measurements as posterior information to condition hydrological model parameters; application to a hard-rock headwater catchment. J. Hydrol. 2020, 587, 124941. [Google Scholar] [CrossRef]
- Jiang, C.; Lin, J.; Duan, Q.; Sun, S.; Tian, B. Statistical stacking and adaptive notch filter to remove high-level electromagnetic noise from MRS measurements. Near Surf. Geophys. 2011, 9, 459–468. [Google Scholar] [CrossRef]
- Dalgaard, E.; Auken, E.; Larsen, J.J. Adaptive noise cancelling of multichannel magnetic resonance sounding signals. Geophys. J. Int. 2012, 191, 88–100. [Google Scholar] [CrossRef]
- Larsen, J.J. Model-based subtraction of spikes from surface nuclear magnetic resonance data. Geophysics 2016, 81, WB1–WB8. [Google Scholar] [CrossRef]
- Lin, T.; Yu, S.; Wang, P.; Fan, T.; Zhang, Y. Removal of a series of spikes from magnetic resonance sounding signal by combining empirical mode decomposition and wavelet thresholding. Rev. Sci. Instrum. 2022, 93, 024502. [Google Scholar] [CrossRef]
- Larsen, J.J.; Dalgaard, E.; Auken, E. Noise cancelling of MRS signals combining model-based removal of powerline harmonics and multichannel wiener filtering. Geophys. J. Int. 2014, 196, 828–836. [Google Scholar] [CrossRef]
- Li, F.; Li, K.t.; Lu, K.; Li, Z.Y. Cancellation of varying harmonic noise in magnetic resonance sounding signals. J. Appl. Geophys. 2020, 177, 104047. [Google Scholar] [CrossRef]
- Jiang, C.; Zhou, Y.; Wang, Y.; Duan, Q.; Tian, B. Harmonic Noise-Elimination Method Based on the Synchroextracting Transform for Magnetic-Resonance Sounding Data. IEEE Trans. Instrum. Meas. 2021, 70, 6504111. [Google Scholar] [CrossRef]
- Liu, L.; Grombacher, D.; Auken, E.; Larsen, J.J. Removal of Co-Frequency Powerline Harmonics From Multichannel Surface NMR Data. IEEE Geosci. Remote Sens. Lett. 2018, 15, 53–57. [Google Scholar] [CrossRef]
- Wang, Q.; Jiang, C.; Müller-Petke, M. An alternative approach to handling co-frequency harmonics in surface nuclear magnetic resonance data. Geophys. J. Int. 2018, 215, 1962–1973. [Google Scholar] [CrossRef]
- Legchenko, A.; Valla, P. A review of the basic principles for proton magnetic resonance sounding measurements. J. Appl. Geophys. 2002, 50, 3–19. [Google Scholar] [CrossRef]
- Ge, X.; Fan, Y.; Li, J.; Wang, Y.; Deng, S. Noise reduction of nuclear magnetic resonance (NMR) transversal data using improved wavelet transform and exponentially weighted moving average (EWMA). J. Magn. Reson. 2015, 251, 71–83. [Google Scholar] [CrossRef] [PubMed]
- TingTing, L.; Yang, Z.; Ying, Y.; YuJing, Y.; Fei, T.; Ling, W. Segmented time-frequency peak filtering for random noise reduction of MRS oscillating signal. Chin. J. Geophys. 2018, 61, 3812–3824. (In Chinese) [Google Scholar] [CrossRef]
- Ting-Ting, L.; Yue, L.; Xing, G.; Ling, W. Random noise suppression of magnetic resonance sounding signal based on modified short-time Fourier transform. Acta Phys. Sin. 2021, 70, 163303. [Google Scholar] [CrossRef]
- Ghanati, R.; Fallahsafari, M.; Hafizi, M.K. Joint application of a statistical optimization process and empirical mode decomposition to magnetic resonance sounding noise cancellation. J. Appl. Geophys. 2014, 111, 110–120. [Google Scholar] [CrossRef]
- Ghanati, R.; Hafizi, M.K.; Fallahsafari, M. Surface nuclear magnetic resonance signals recovery by integration of a non-linear decomposition method with statistical analysis. Geophys. Prospect. 2016, 64, 489–504. [Google Scholar] [CrossRef]
- Liu, L.; Grombacher, D.; Auken, E.; Larsen, J.J. Complex envelope retrieval for surface nuclear magnetic resonance data using spectral analysis. Geophys. J. Int. 2019, 217, 894–905. [Google Scholar] [CrossRef]
- Tian, B.; Sun, C.; Liu, L.; Lin, Y.D.; Chiu, C.C.; Duan, H.; Luan, H. Envelope extraction algorithm for magnetic resonance sounding signals based on adaptive local iterative filtering. Front. Earth Sci. 2023, 11, 1088290. [Google Scholar] [CrossRef]
- Lin, T.; Wei, M.; Zhang, Y. Deep Learning for Denoising: An Attempt to Recover the Effective Magnetic Resonance Sounding Signal in the Presence of High Level Noise. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5910613. [Google Scholar] [CrossRef]
- Jiang, C.; Miao, R.; Li, B.; Tian, B.; Shang, X.; Duan, Q.; Lin, T. Multitype Noise Suppression in Magnetic Resonance Sounding Data Based on a Time-Frequency Fully Convolutional Neural Network. IEEE Trans. Instrum. Meas. 2023, 72, 6501411. [Google Scholar] [CrossRef]
- Du, G.; Lin, J.; Zhang, J.; Yi, X.; Jiang, C. Study on Shortening the Dead Time of Surface Nuclear Magnetic Resonance Instrument Using Bipolar Phase Pulses. IEEE Trans. Instrum. Meas. 2020, 69, 1268–1274. [Google Scholar] [CrossRef]
- Lin, Y.D.; Tan, Y.K.; Tian, B. A novel approach for decomposition of biomedical signals in different applications based on data-adaptive Gaussian average filtering. Biomed. Signal Process. Control 2022, 71, 103104. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Larmor Frequency (Hz) | Method | (dB) | (dB) | (dB) | (nV) | (nV) | (ms) | (ms) |
|---|---|---|---|---|---|---|---|---|---|
| HNC | −9.27 | 0.86 | 10.13 | 101.12 | 203.79 | ||||
| 1 | 2351 | EMD | −9.27 | 17.11 | 26.38 | 102 | 102.09 | 200 | 212.91 |
| GSF | −9.27 | 24.93 | 34.20 | 100.97 | 197.19 | ||||
| HNC | −8.20 | 2.73 | 10.93 | 80.80 | 204.43 | ||||
| 2 | 2355 | EMD | −8.20 | 16.99 | 25.19 | 80 | 76.28 | 200 | 198.97 |
| GSF | −8.20 | 23.93 | 32.13 | 76.99 | 201.72 | ||||
| HNC | −8.11 | 2.93 | 11.04 | 84.68 | 417.73 | ||||
| 3 | 2355 | EMD | −8.11 | 22.82 | 30.93 | 86 | 86.07 | 400 | 397.13 |
| GSF | −8.11 | 24.30 | 32.41 | 84.35 | 406.95 |
| Group | (dB) | (dB) | (dB) | (nV) | (ms) |
|---|---|---|---|---|---|
| 1 | −23.54 | 29.52 | 53.06 | 99.46 ± 3.30 | 201.54 ± 5.98 |
| 2 | −21.94 | 29.25 | 51.19 | 99.98 ± 2.74 | 200.82 ± 5.53 |
| 3 | −20.75 | 28.29 | 49.04 | 99.47 ± 2.47 | 201.66 ± 4.60 |
| 4 | −16.72 | 34.15 | 50.87 | 99.47 ± 1.83 | 200.99 ± 3.69 |
| 5 | −14.15 | 34.32 | 48.47 | 99.27 ± 1.07 | 201.73 ± 2.07 |
| 6 | −7.47 | 37.93 | 45.40 | 99.31 ± 0.25 | 201.38 ± 0.59 |
| Group | (ms) | (dB) | (dB) | (dB) | (nV) | (ms) |
|---|---|---|---|---|---|---|
| 1 | 100 | −21.97 | 31.29 | 52.66 | 101.61 ± 3.14 | 99.18 ± 2.82 |
| 2 | 200 | −18.19 | 31.73 | 49.92 | 100.08 ± 1.57 | 201.59 ± 3.20 |
| 3 | 300 | −15.99 | 36.66 | 52.65 | 99.78 ± 1.26 | 299.27 ± 4.43 |
| 4 | 400 | −14.54 | 34.93 | 49.47 | 99.09 ± 0.75 | 402.43 ± 3.35 |
| 5 | 500 | −13.55 | 38.27 | 51.82 | 100.00 ± 0.82 | 496.81 ± 5.27 |
| 6 | 600 | −12.70 | 32.93 | 45.63 | 99.07 ± 0.78 | 602.81 ± 5.43 |
| Group | (Hz) | (dB) | (dB) | (dB) | (nV) | (ms) |
|---|---|---|---|---|---|---|
| 1 | 2300 | −17.96 | 14.93 | 32.89 | 108.58 ± 5.52 | 200.12 ± 14.19 |
| 2 | 2310 | −18.11 | 24.63 | 42.74 | 99.81 ± 1.90 | 200.59 ± 3.31 |
| 3 | 2320 | −18.05 | 30.05 | 48.10 | 99.34 ± 1.68 | 201.74 ± 3.18 |
| 4 | 2330 | −18.10 | 32.39 | 50.49 | 99.42 ± 1.39 | 200.95 ± 3.25 |
| 5 | 2340 | −18.09 | 26.83 | 44.92 | 98.35 ± 1.96 | 200.49 ± 3.35 |
| 6 | 2350 | −17.97 | 15.57 | 33.54 | 91.14 ± 7.59 | 224.65 ± 53.32 |
| 7 | 2360 | −18.04 | 23.73 | 41.77 | 100.30 ± 1.75 | 198.08 ± 3.52 |
| 8 | 2370 | −18.25 | 27.54 | 45.79 | 101.03 ± 1.80 | 199.62 ± 3.49 |
| Group | White Noise Amplitude (nV) | (dB) | (dB) | (dB) | (nV) | (ms) |
|---|---|---|---|---|---|---|
| 1 | 100 | −18.83 | 28.30 | 47.13 | 99.51 ± 1.70 | 201.30 ± 3.71 |
| 2 | 200 | −21.20 | 23.06 | 44.26 | 99.58 ± 2.07 | 197.04 ± 5.40 |
| 3 | 300 | −23.61 | 20.19 | 43.80 | 100.05 ± 2.11 | 198.88 ± 5.77 |
| 4 | 400 | −25.59 | 15.47 | 41.06 | 101.37 ± 3.99 | 199.61 ± 5.89 |
| 5 | 500 | −27.35 | 15.74 | 43.09 | 106.72 ± 4.27 | 199.43 ± 13.87 |
| 6 | 600 | −28.73 | 12.27 | 41.00 | 108.11 ± 6.36 | 211.57 ± 16.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, B.; Duan, H.; Lin, Y.-D.; Luan, H. Envelope Extraction Algorithm for Magnetic Resonance Sounding Signals Based on Adaptive Gaussian Filters. Remote Sens. 2024, 16, 1713. https://doi.org/10.3390/rs16101713
Tian B, Duan H, Lin Y-D, Luan H. Envelope Extraction Algorithm for Magnetic Resonance Sounding Signals Based on Adaptive Gaussian Filters. Remote Sensing. 2024; 16(10):1713. https://doi.org/10.3390/rs16101713
Chicago/Turabian StyleTian, Baofeng, Haoyu Duan, Yue-Der Lin, and Hui Luan. 2024. "Envelope Extraction Algorithm for Magnetic Resonance Sounding Signals Based on Adaptive Gaussian Filters" Remote Sensing 16, no. 10: 1713. https://doi.org/10.3390/rs16101713
APA StyleTian, B., Duan, H., Lin, Y.-D., & Luan, H. (2024). Envelope Extraction Algorithm for Magnetic Resonance Sounding Signals Based on Adaptive Gaussian Filters. Remote Sensing, 16(10), 1713. https://doi.org/10.3390/rs16101713