
Fault Detection and Interactive Multiple Models Optimization Algorithm Based on Factor Graph Navigation System



Abstract
1. Introduction
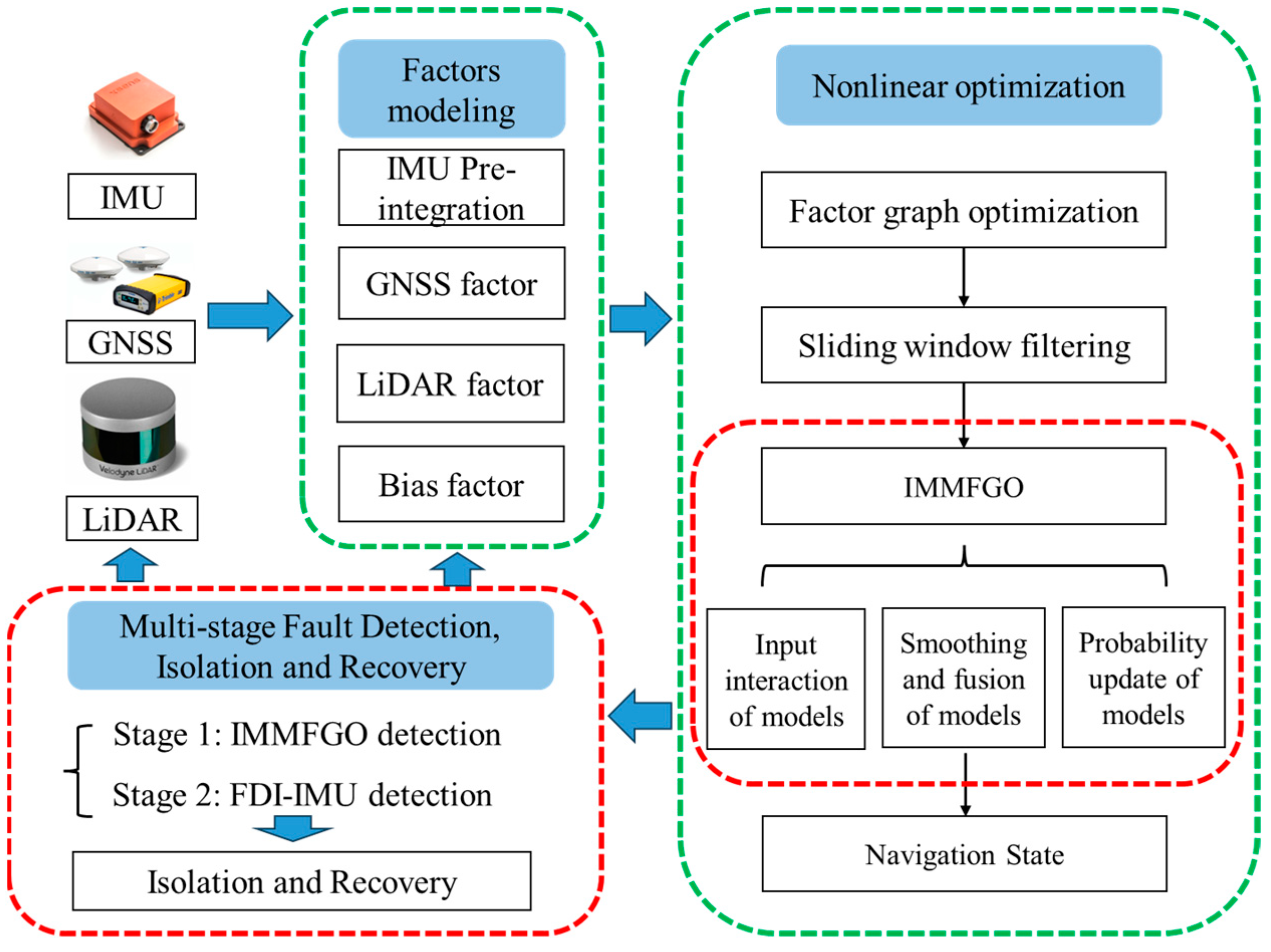
- An IMU/GNSS/LiDAR integrated navigation system framework based on factor graph optimization is constructed. Meanwhile, the error models of sensors are constructed in a formulaic factor graph optimization system, and the ISAM2 sliding window algorithm is applied to marginalize the historical information and improve the real-time performance.
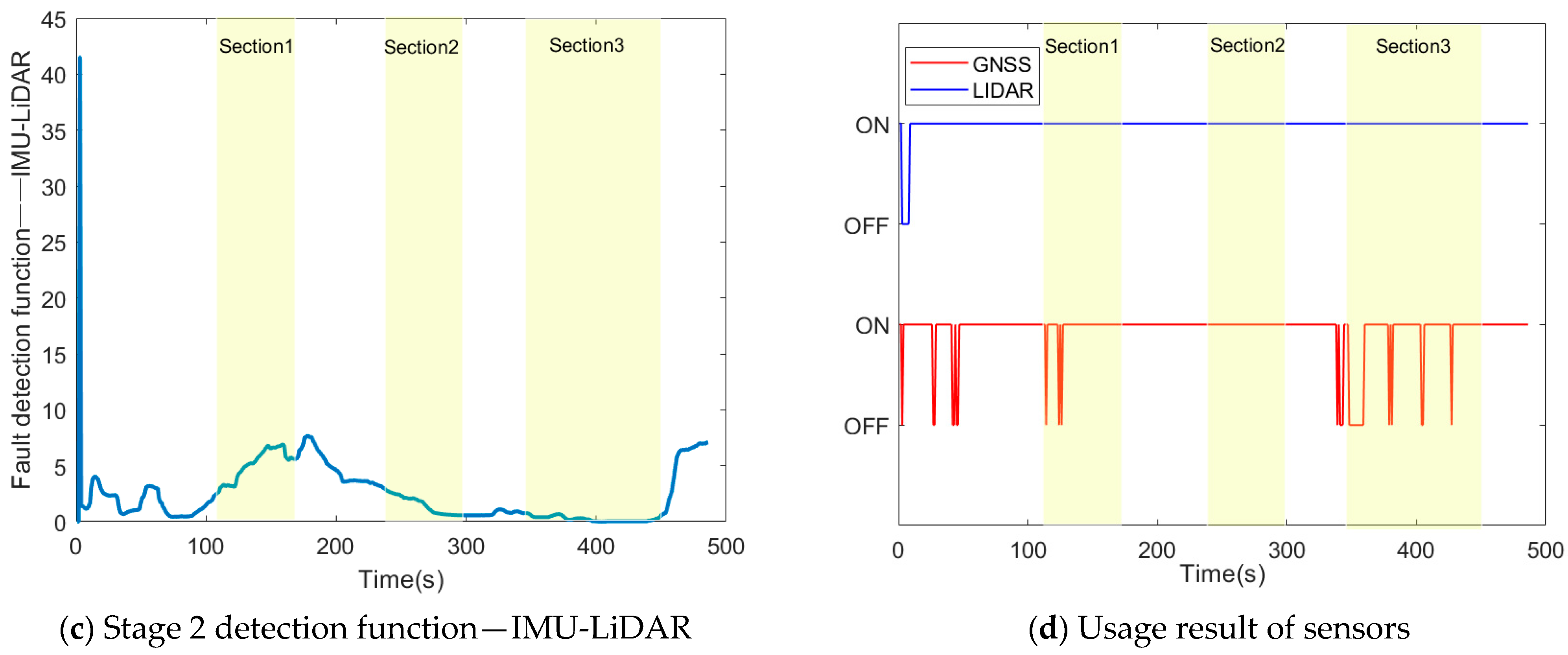
- The IMMFGO algorithm of GNSS and LiDAR sub-model measurements is applied to update the weights of the sensors in global optimization. The MSFDIR strategy is employed to detect, isolate and restore fault sensors and reconstruct the system frameworks to adapt to external disturbances.
- Vehicle experiments are conducted to verify the effectiveness of the proposed methods. Qualitative and quantitative analyses are applied to comprehensively compare the performance of proposed IMMFGO and MSFDIR with other typical algorithms to demonstrate the superiority of the proposed method and the possibility of application in natural vehicle navigation systems.
2. System Structures
2.1. System Solution
- The coordinate of IMU is defined as , which is set at the center of the IMU sensor and is the same as the body-fixed coordinate;
- The GNSS frame is defined as , which is set as the WGS-84 coordinate, and the measurement of GNSS is transferred into a navigation coordinate by the transform matrix ;
- The LiDAR frame is defined as , which is set at the center of the LiDAR sensor, and the transform matrix from the LiDAR coordinate into the navigation coordinate is ;
- The world frame is the ENU frame and is defined as , which is set at the initial position of the vehicle and is assumed to coincide with the initial LiDAR frame.
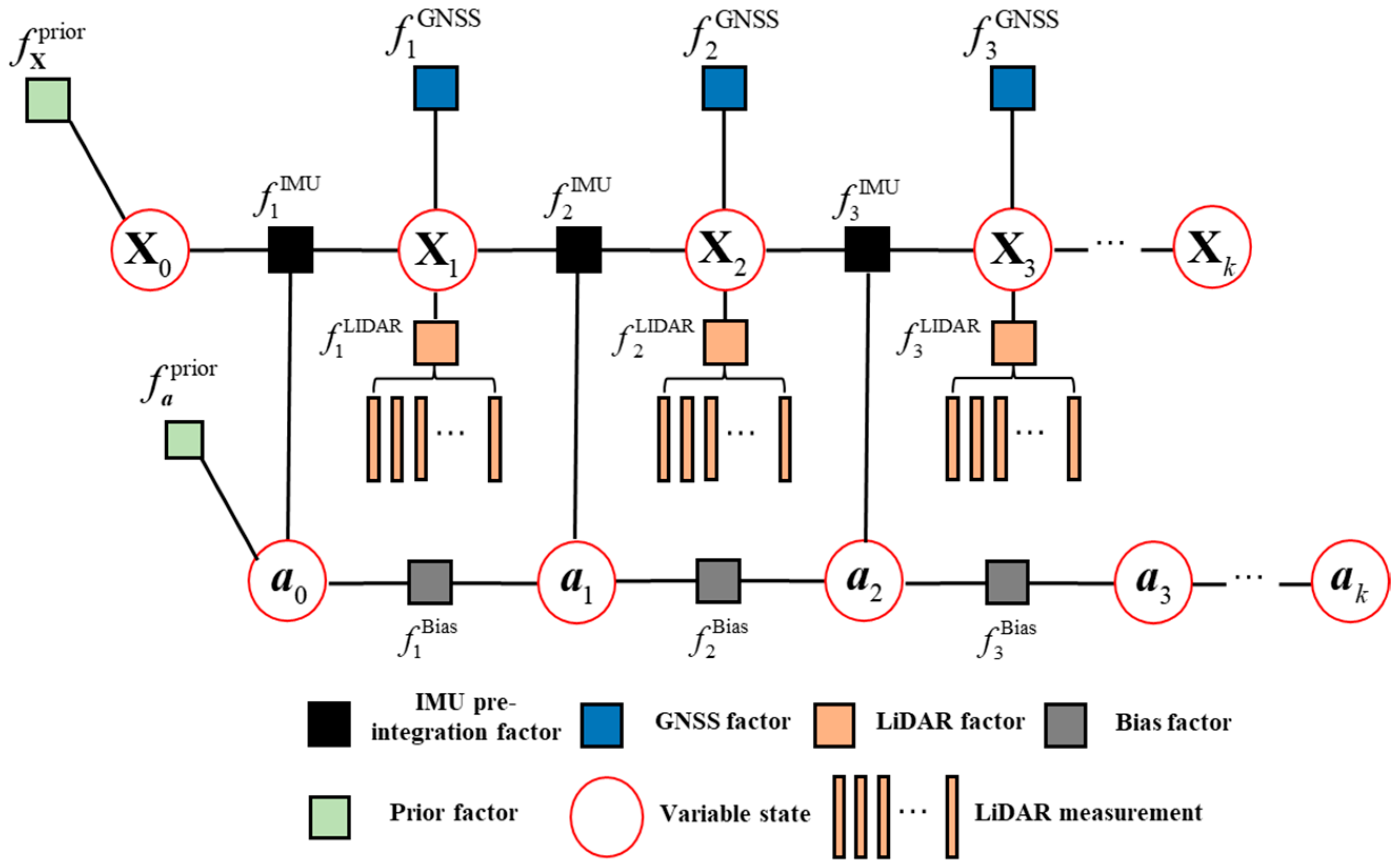
2.2. Factor Graph Structure
2.3. IMU Factor and Bias Factor Modeling
2.4. Other Factors Modeling
3. Key Technology
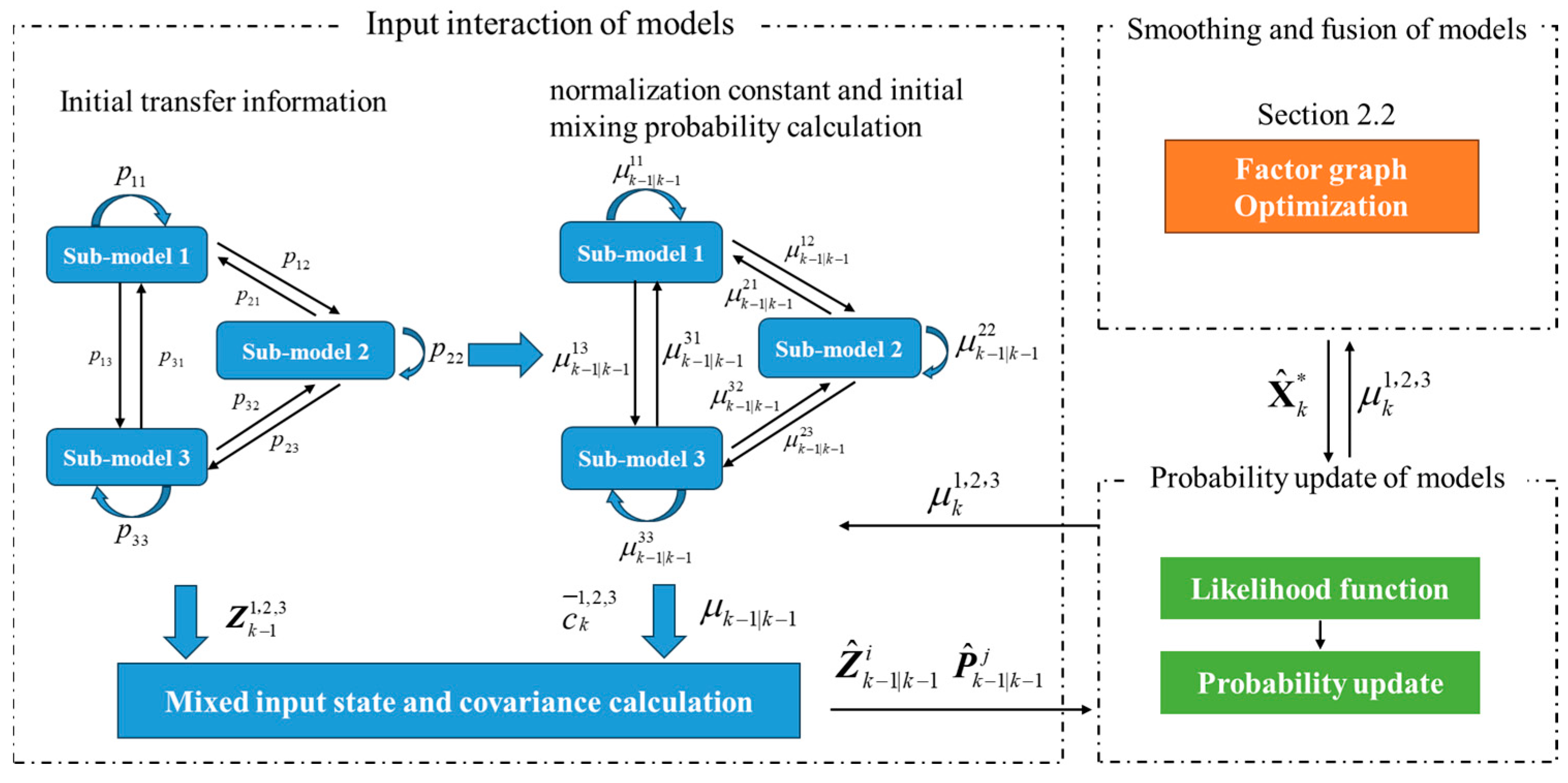
3.1. Interactive Multiple Models Algorithm Based on Factor Graph Optimization
3.1.1. Input Interactions of Models
3.1.2. Smoothing and Fusion of Models
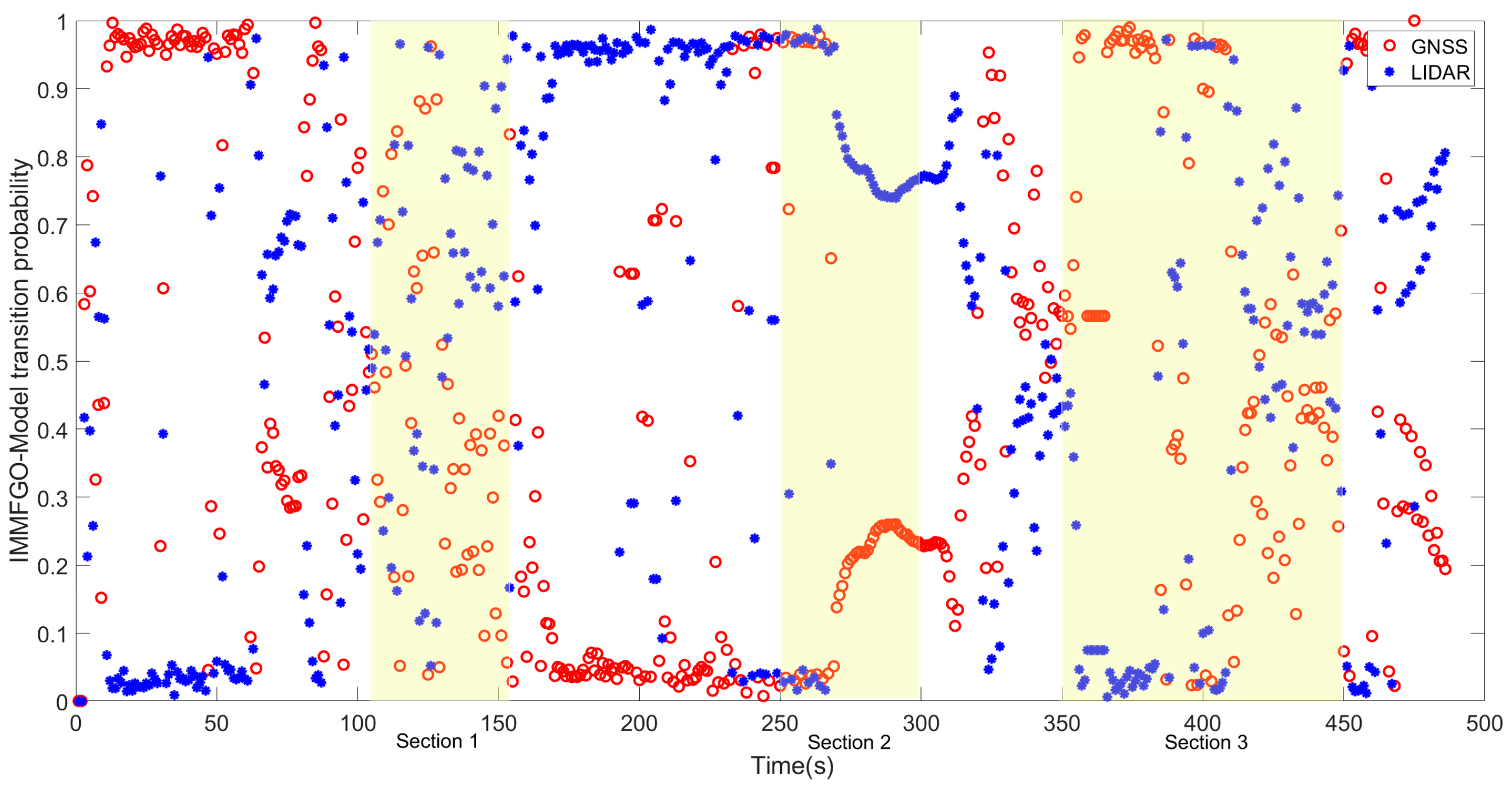
3.1.3. Probability Update of Models
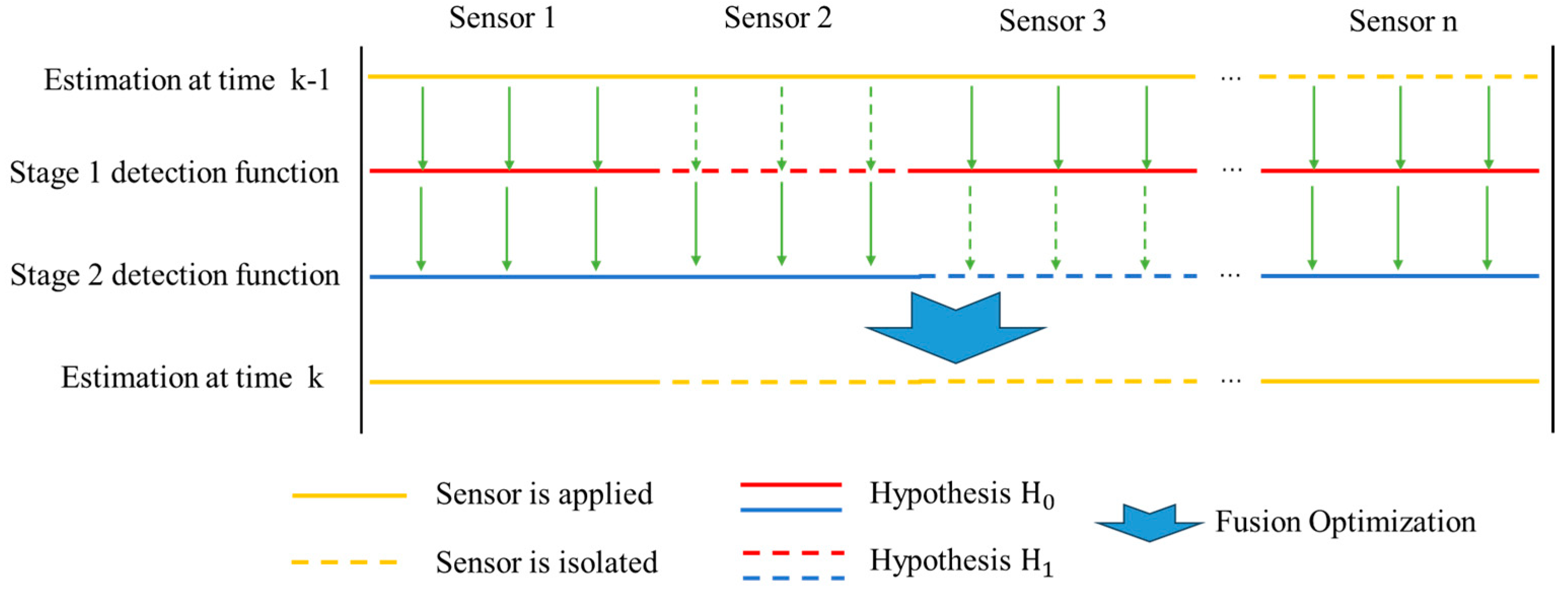
3.2. Multi-Stage Fault Detection, Isolation and Recovery Strategy
4. Experimental Analysis
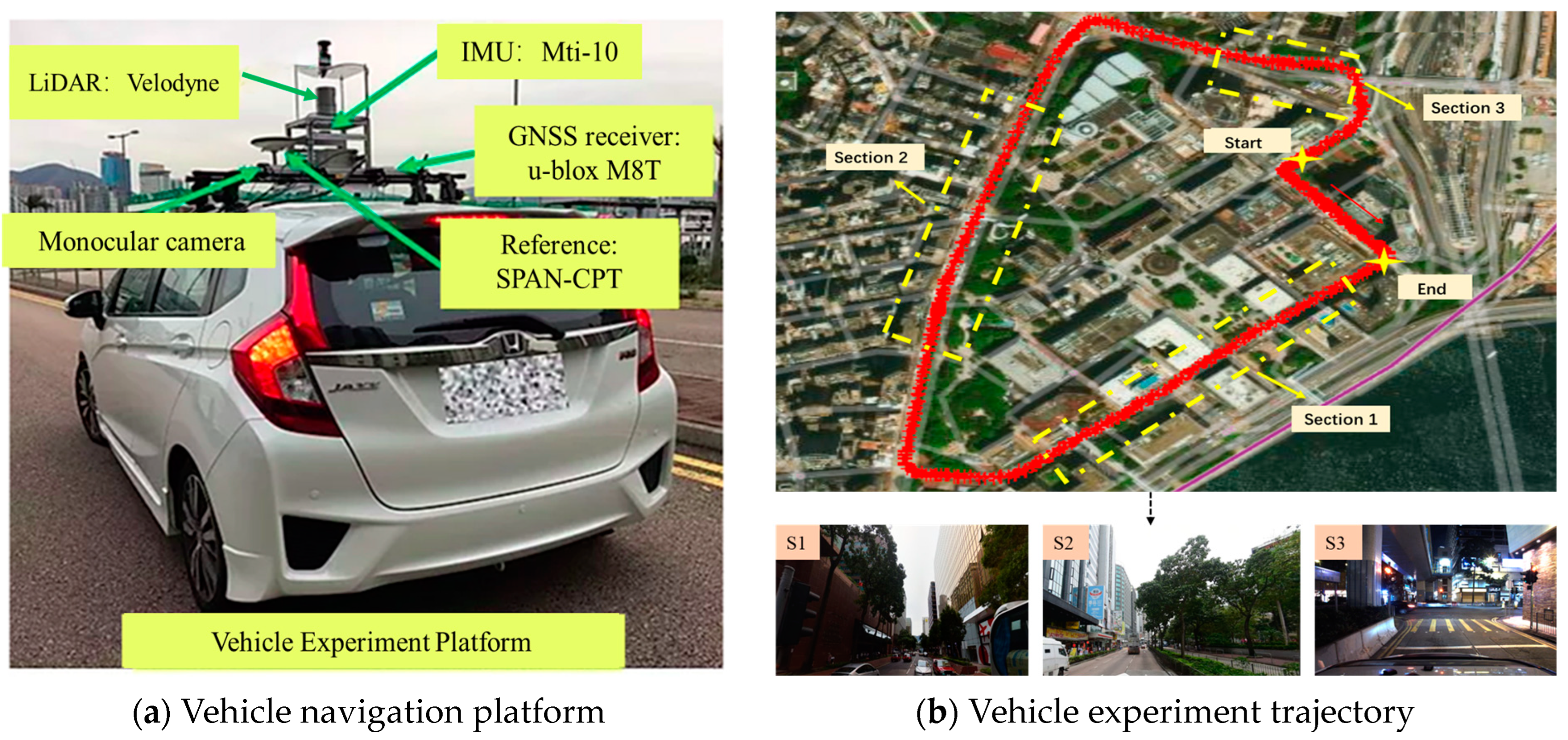
4.1. Experimental Setup
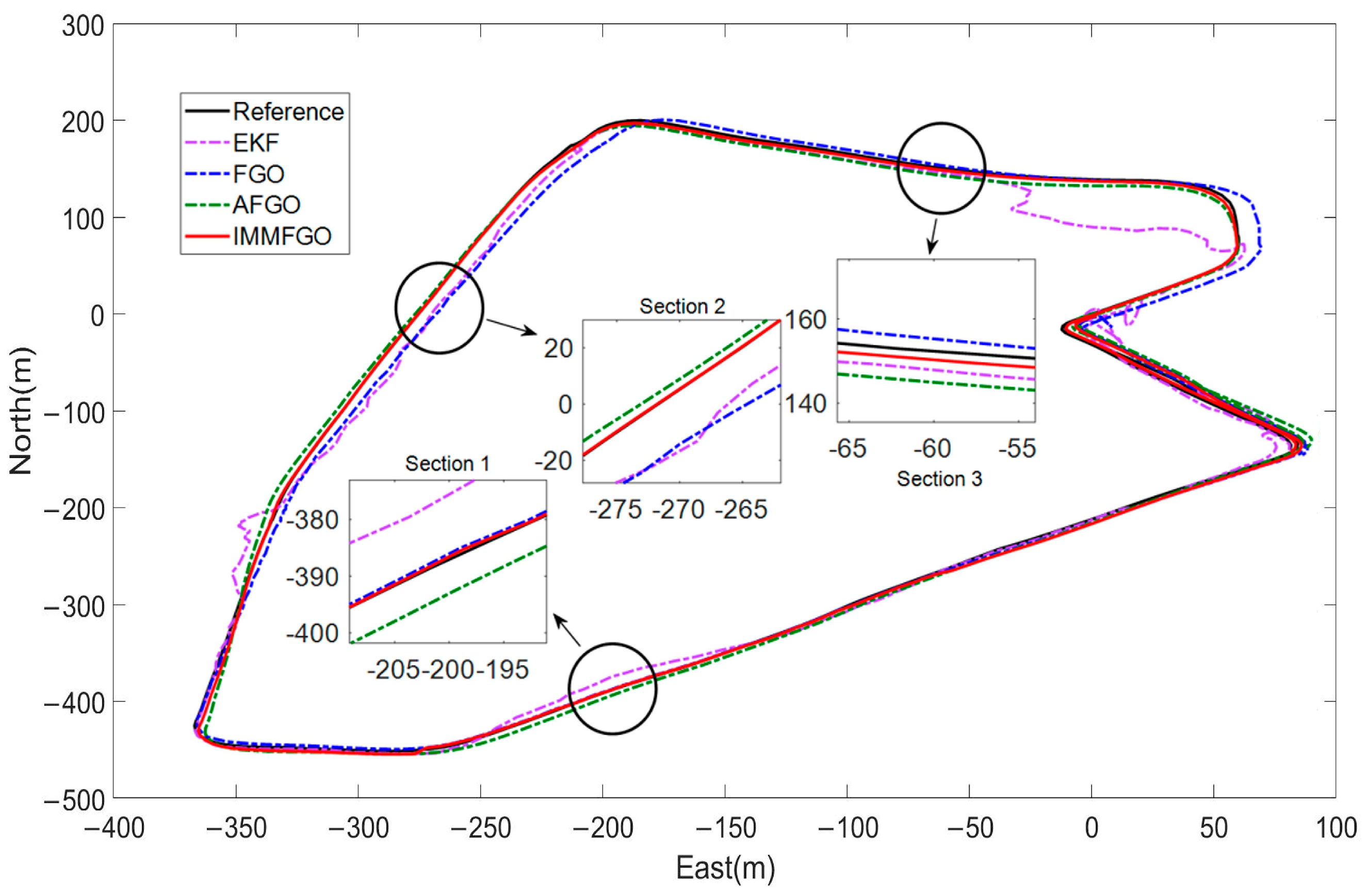
4.2. Experimental Results of IMMFGO
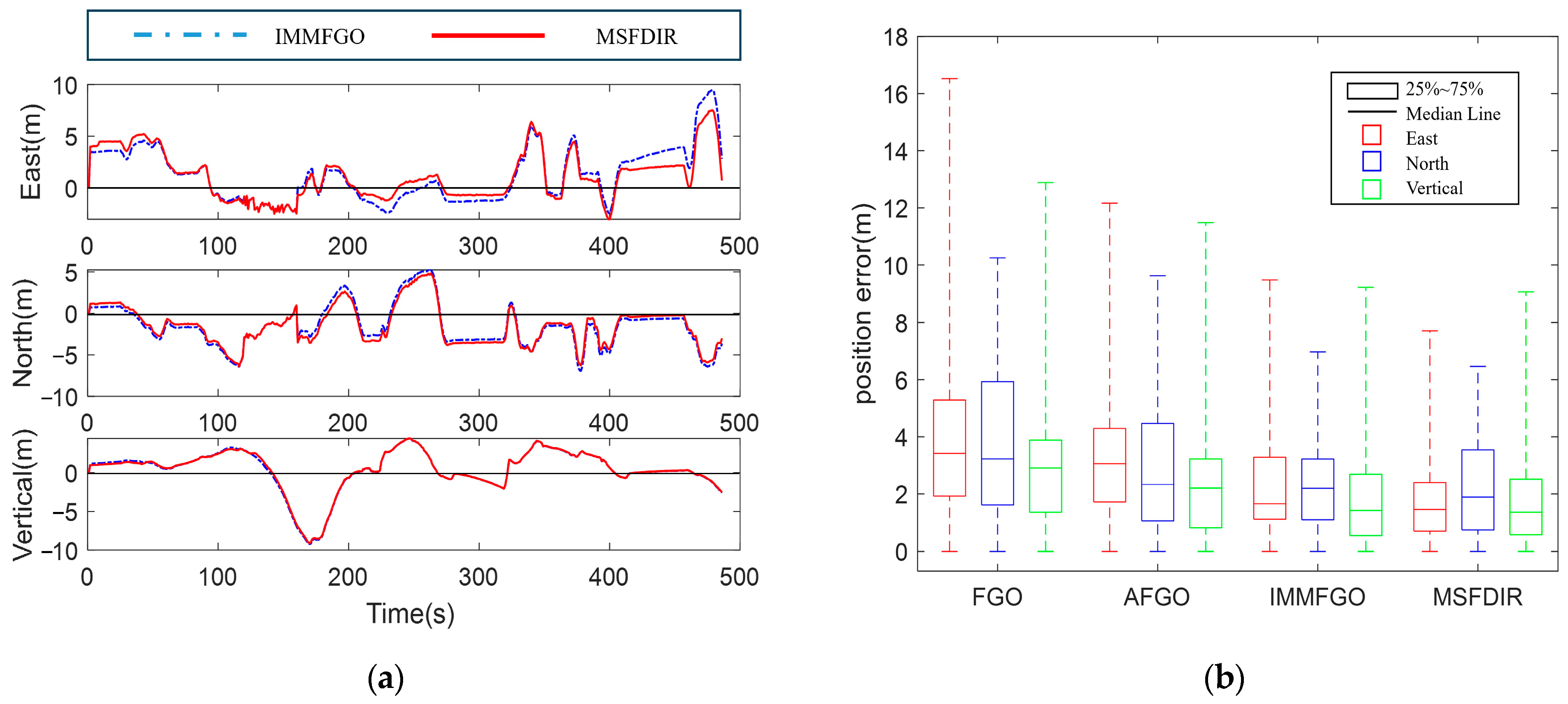
4.3. Experimental Results of MSFDIR
5. Discussion
- The IMMFGO algorithm can be applied to the navigation system in the case of multiple sub-models. We only verify the performance of the algorithm for two sub-models, and more situations need to be considered later;
- The MSFDIR algorithm provides a feasible solution for the detection, isolation, and recovery of faulty sensors, and the performance of other solutions should be studied on this basis;
- We select a representative urban environment experiment to validate the proposed method. It is fascinating to explore more urban data and experiments to verify the universality of the proposed scheme.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chang, D.; Johnson-Roberson, M.; Sun, J. An Active Perception Framework for Autonomous Underwater Vehicle Navigation Under Sensor Constraints. IEEE Trans. Control Syst. Technol. 2022, 30, 2301–2316. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, F.; Niu, J.W.; Liu, Y. ReinforcementDriving: Exploring Trajectories and Navigation for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 808–820. [Google Scholar] [CrossRef]
- Zhang, R.B.; Wu, Y.Z.; Zhang, L.X.; Xu, C.; Gao, F. Autonomous and Adaptive Navigation for Terrestrial-Aerial Bimodal Vehicles. IEEE Rob. Autom. Lett. 2022, 7, 3008–3015. [Google Scholar] [CrossRef]
- Sun, K.; Zeng, Q.; Liu, J.; Qiu, W.; Shi, J. Modified attitude factor graph fusion method for unmanned helicopter under atmospheric disturbance. Chin. J. Aeronaut. 2022, 35, 285–297. [Google Scholar] [CrossRef]
- Jiang, H.T.; Li, T.; Song, D.; Shi, C. An Effective Integrity Monitoring Scheme for GNSS/INS/Vision Integration Based on Error State EKF Model. IEEE Sens. J. 2022, 22, 7063–7073. [Google Scholar] [CrossRef]
- Qin, H.M.; Wang, X.; Wang, G.C.; Hu, M.J.; Bian, Y.G.; Qin, X.H.; Ding, R.J. A novel INS/USBL/DVL integrated navigation scheme against complex underwater environment. Ocean Eng. 2023, 286. [Google Scholar] [CrossRef]
- Taghizadeh, S.; Safabakhsh, R. An Integrated INS/GNSS System With an Attention-Based Deep Network for Drones in GNSS Denied Environments. IEEE Aerosp. Electron. Syst. Mag. 2023, 38, 14–25. [Google Scholar] [CrossRef]
- Taghizadeh, S.; Safabakhsh, R. An integrated INS/GNSS system with an attention-based hierarchical LSTM during GNSS outage. GPS Solutions 2023, 27, 71. [Google Scholar] [CrossRef]
- Zhang, J.C.; Wen, W.S.; Huang, F.; Chen, X.D.; Hsu, L.T. Coarse-to-Fine Loosely-Coupled LiDAR-Inertial Odometry for Urban Positioning and Mapping. Remote Sens. 2021, 13, 2371. [Google Scholar] [CrossRef]
- Sun, K.C.; Zeng, Q.H.; Liu, J.Y.; Wang, S.Y. Fault Detection of Resilient Navigation System Based on GNSS Pseudo-Range Measurement. Appl. Sci. 2022, 12, 5313. [Google Scholar] [CrossRef]
- Ambroziak, L.; Ciezkowski, M.; Wolniakowski, A.; Romaniuk, S.; Bozko, A.; Oldziej, D.; Kownacki, C. Experimental tests of hybrid VTOL unmanned aerial vehicle designed for surveillance missions and operations in maritime conditions from ship-based helipads. J. Field Rob. 2022, 39, 203–217. [Google Scholar] [CrossRef]
- Shen, C.; Xiong, Y.F.; Zhao, D.H.; Wang, C.G.; Cao, H.L.; Song, X.; Tang, J.; Liu, J. Multi-rate strong tracking square-root cubature Kalman filter for MEMS-INS/GPS/polarization compass integrated navigation system. Mech. Syst. Sig. Process. 2022, 163, 108146. [Google Scholar] [CrossRef]
- Shen, C.; Zhang, Y.; Tang, J.; Cao, H.L.; Liu, J. Dual-optimization for a MEMS-INS/GPS system during GPS outages based on the cubature Kalman filter and neural networks. Mech. Syst. Sig. Process. 2019, 133, 106222. [Google Scholar] [CrossRef]
- Ma, X.; Liu, X.; Zhang, T.; Liu, X.; Xu, G. AUV multi-sensor integrated navigation algorithm based on factor graph. J. Chin. Inert. Technol. 2019, 27, 454–459. [Google Scholar]
- Indelman, V.; Williams, S.; Kaess, M.; Dellaert, F. Information fusion in navigation systems via factor graph based incremental smoothing. Rob. Auton. Syst. 2013, 61, 721–738. [Google Scholar] [CrossRef]
- Xu, J.; Yang, G.L.; Sun, Y.D.; Picek, S. A Multi-Sensor Information Fusion Method Based on Factor Graph for Integrated Navigation System. IEEE Access 2021, 9, 12044–12054. [Google Scholar] [CrossRef]
- Vallve, J.; Sola, J.; Andrade-Cetto, J. Pose-graph SLAM sparsification using factor descent. Rob. Auton. Syst. 2019, 119, 108–118. [Google Scholar] [CrossRef]
- Tu, M.Y.; Zeng, P.L.; Wu, Q.X.; Jing, T.; Tian, Y.Y.; Luo, Y.B.; Mao, W.D. Lidar SLAM Based on Particle Filter and Graph Optimization for Substation Inspection. IEEE Access 2022, 10, 127540–127549. [Google Scholar] [CrossRef]
- Lu, D.F.; Zhang, Y.W.; Gong, Z.W.; Wu, T.N. A SLAM Method Based on Multi-Robot Cooperation for Pipeline Environments Underground. Sustainability 2022, 14, 12995. [Google Scholar] [CrossRef]
- Chen, H.L.; Wu, W.; Zhang, S.; Wu, C.H.; Zhong, R.F. A GNSS/LiDAR/IMU Pose Estimation System Based on Collaborative Fusion of Factor Map and Filtering. Remote Sens. 2023, 15, 790. [Google Scholar] [CrossRef]
- Bouchareb, I.; Bentounsi, A.; Lebaroud, A. Fault detection and diagnosis in a set “inverter-switched reluctance motor” based on pattern recognition using Kalman filter prediction. Int. J. Appl. Electromagn. Mech. 2014, 45, 495–502. [Google Scholar] [CrossRef]
- Zabalegui, P.; De Miguel, G.; Goya, J.; Moya, I.; Mendizabal, J.; Adín, I. Residual based fault detection and exclusion methods applied to Ultra-Wideband navigation. Measurement 2021, 179, 109350. [Google Scholar] [CrossRef]
- Jurado, J.; Raquet, J.; Kabban, C.M.S. Single-Filter Finite Fault Detection and Exclusion Methodology for Real-Time Validation of Plug-and-Play Sensors. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 66–75. [Google Scholar] [CrossRef]
- Elsayed, H.; El-Mowafy, A.; Wang, K. A new method for fault identification in real-time integrity monitoring of autonomous vehicles positioning using PPP-RTK. GPS Solut. 2024, 28, 32. [Google Scholar] [CrossRef]
- Wang, Z.P.; Li, B.; Dan, Z.Q.; Wang, H.X.; Fang, K. 3D LiDAR Aided GNSS/INS Integration Fault Detection, Localization and Integrity Assessment in Urban Canyons. Remote Sens. 2022, 14, 4641. [Google Scholar] [CrossRef]
- Gao, Y.T.; Gao, Y.; Liu, B.Y.; Jiang, Y. Enhanced fault detection and exclusion based on Kalman filter with colored measurement noise and application to RTK. GPS Solut. 2021, 25, 82. [Google Scholar] [CrossRef]
- Kheirandish, M.; Yazdi, E.A.; Mohammadi, H.; Mohammadi, M. A fault-tolerant sensor fusion in mobile robots using multiple model Kalman filters. Rob. Auton. Syst. 2023, 161, 104343. [Google Scholar] [CrossRef]
- Xiong, J.; Xiong, Z.; Zhuang, Y.; Cheong, J.W.; Dempster, A.G. Fault-Tolerant Cooperative Positioning Based on Hybrid Robust Gaussian Belief Propagation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 6425–6431. [Google Scholar] [CrossRef]
- Wang, L.; Li, S.X. Enhanced Multi-sensor Data Fusion Methodology based on Multiple Model Estimation for Integrated Navigation System. Int. J. Control Autom. 2018, 16, 295–305. [Google Scholar] [CrossRef]
- Thanaraj, T.; Low, K.H.; Ng, B.F. Actuator fault detection and isolation on multi-rotor UAV using extreme learning neuro-fuzzy systems. ISA Trans. 2023, 138, 168–185. [Google Scholar] [CrossRef] [PubMed]
- Forkuo, G.O.; Borz, S.A. Accuracy and inter-cloud precision of low-cost mobile LiDAR technology in estimating soil disturbance in forest operations. Front. For. Glob. Chang. 2023, 6, 1224575. [Google Scholar] [CrossRef]
- Shen, Z.H.; Wang, J.B.; Pang, C.L.; Lan, Z.Y.; Fang, Z. A LiDAR-IMU-GNSS fused mapping method for large-scale and high-speed scenarios. Measurement 2024, 225, 113961. [Google Scholar] [CrossRef]
- Zhang, H.M.; Xia, X.; Nitsch, M.M.; Abel, D. Continuous-Time Factor Graph Optimization for Trajectory Smoothness of GNSS/INS Navigation in Temporarily GNSS-Denied Environments. IEEE Rob. Autom. Lett. 2022, 7, 9115–9122. [Google Scholar] [CrossRef]
- Jiang, C.H.; Chen, Y.W.; Xu, B.; Jia, J.X.; Sun, H.B.; Chen, C.; Duan, Z.Y.; Bo, Y.M.; Hyyppä, J. Vector Tracking Based on Factor Graph Optimization for GNSS NLOS Bias Estimation and Correction. IEEE Internet Things J. 2022, 9, 16209–16221. [Google Scholar] [CrossRef]
- Li, Q.M.; Zhang, L.W.; Wang, X.L. Loosely Coupled GNSS/INS Integration Based on Factor Graph and Aided by ARIMA Model. IEEE Sens. J. 2021, 21, 24379–24387. [Google Scholar] [CrossRef]
- Yin, F.; Butts, C.T. Highly scalable maximum likelihood and conjugate Bayesian inference for ERGMs on graph sets with equivalent vertices. PLoS ONE 2022, 17, e0273039. [Google Scholar] [CrossRef]
- Bai, S.Y.; Lai, J.Z.; Lyu, P.; Cen, Y.T.; Ji, B.W. Improved Preintegration Method for GNSS/IMU/In-Vehicle Sensors Navigation Using Graph Optimization. IEEE Trans. Veh. Technol. 2021, 70, 11446–11457. [Google Scholar] [CrossRef]
- Laconte, J.; Lisus, D.; Barfoot, T.D. Toward Certifying Maps for Safe Registration-Based Localization Under Adverse Conditions. IEEE Rob. Autom. Lett. 2024, 9, 1572–1579. [Google Scholar] [CrossRef]
- Yuan, R.H.; Taylor, C.N.; Nykl, S.L.; Taylor, C. Accurate Covariance Estimation for Pose Data From Iterative Closest Point Algorithm. Navig. J. Inst. Navig. 2023, 70, navi.562. [Google Scholar] [CrossRef]
- Wang, Y.; Gong, Y.X.; Yang, H.K. A mobile localization algorithm based on fuzzy estimation for serious NLOS scenes. Peer--Peer Netw. Appl. 2023, 16, 2271–2289. [Google Scholar] [CrossRef]
- Wei, X.K.; Li, J.; Zhang, D.B.; Feng, K.Q. An improved integrated navigation method with enhanced robustness based on factor graph. Mech. Syst. Sig. Process. 2021, 155, 107565. [Google Scholar] [CrossRef]
- Zhu, Y.X.; Wu, X.X. A Fault-Tolerant Scheme Based on MSVR for Integrated Navigation. IEEE Sens. J. 2022, 22, 18740–18750. [Google Scholar] [CrossRef]
- Zhang, J.C.; Wen, W.S.; Huang, F.; Wang, Y.L.; Chen, X.D.; Hsu, L.T. GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons. Appl. Sci. 2022, 12, 5193. [Google Scholar] [CrossRef]
- Hashemi, M.; Shami, E. New fault detection and fault-tolerant scheme for Doppler velocity logger outage in ocean navigation systems. J. Navig. 2021, 74, 409–424. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | Parameter Types | Parameter Values |
|---|---|---|
| Xsens-Mti-10 IMU | Frequency | 100 Hz |
| Gyroscope random drift error | 18 °/h | |
| Accelerometer random drift error | 15 μg | |
| U-blox M8T GNSS receiver | Frequency | 1 Hz |
| Positioning accuracy | 2.5 m | |
| HDL-32E Velodyne LiDAR | Frequency | 10 Hz |
| Measurement Range | 80 m | |
| Range Accuracy | 2 cm |
| Types of Error | EKF | FGO | AFGO | IMMFGO | Improvement |
|---|---|---|---|---|---|
| East | 8.07 | 8.16 | 3.66 | 2.85 | 22.1% |
| North | 10.05 | 3.96 | 3.95 | 2.90 | 26.5% |
| Vertical | 5.87 | 4.62 | 3.46 | 2.72 | 21.3% |
| 3D | 14.14 | 10.18 | 6.4 | 4.88 | 23.7% |
| Methods | 3D RMSE (m) |
|---|---|
| Alone GNSS | 42.02 |
| LIO-SAM | 19.89 |
| Adaptive Integrated GNSS-RTK/LIO = 90°, 35°, 15°) | 25.33, 18.88, 4.12 |
| IMMFGO | 4.88 |
| Types of Error | EKF | FGO | AFGO | IMMFGO | MSFDIR | Improvement |
|---|---|---|---|---|---|---|
| East | 9.07 | 8.16 | 3.66 | 2.85 | 2.64 | 7.4% |
| North | 10.05 | 3.96 | 3.95 | 2.90 | 2.66 | 8.3% |
| Vertical | 5.87 | 4.62 | 3.46 | 2.72 | 2.35 | 13.6% |
| 3D | 14.14 | 10.18 | 6.4 | 4.88 | 4.42 | 9.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zeng, Q.; Shao, C.; Li, F.; Liu, J. Fault Detection and Interactive Multiple Models Optimization Algorithm Based on Factor Graph Navigation System. Remote Sens. 2024, 16, 1651. https://doi.org/10.3390/rs16101651
Wang S, Zeng Q, Shao C, Li F, Liu J. Fault Detection and Interactive Multiple Models Optimization Algorithm Based on Factor Graph Navigation System. Remote Sensing. 2024; 16(10):1651. https://doi.org/10.3390/rs16101651
Chicago/Turabian StyleWang, Shouyi, Qinghua Zeng, Chen Shao, Fangdong Li, and Jianye Liu. 2024. "Fault Detection and Interactive Multiple Models Optimization Algorithm Based on Factor Graph Navigation System" Remote Sensing 16, no. 10: 1651. https://doi.org/10.3390/rs16101651
APA StyleWang, S., Zeng, Q., Shao, C., Li, F., & Liu, J. (2024). Fault Detection and Interactive Multiple Models Optimization Algorithm Based on Factor Graph Navigation System. Remote Sensing, 16(10), 1651. https://doi.org/10.3390/rs16101651