
A Scale Conversion Model Based on Deep Learning of UAV Images

Abstract

1. Introduction
2. Reduction Method and Dataset
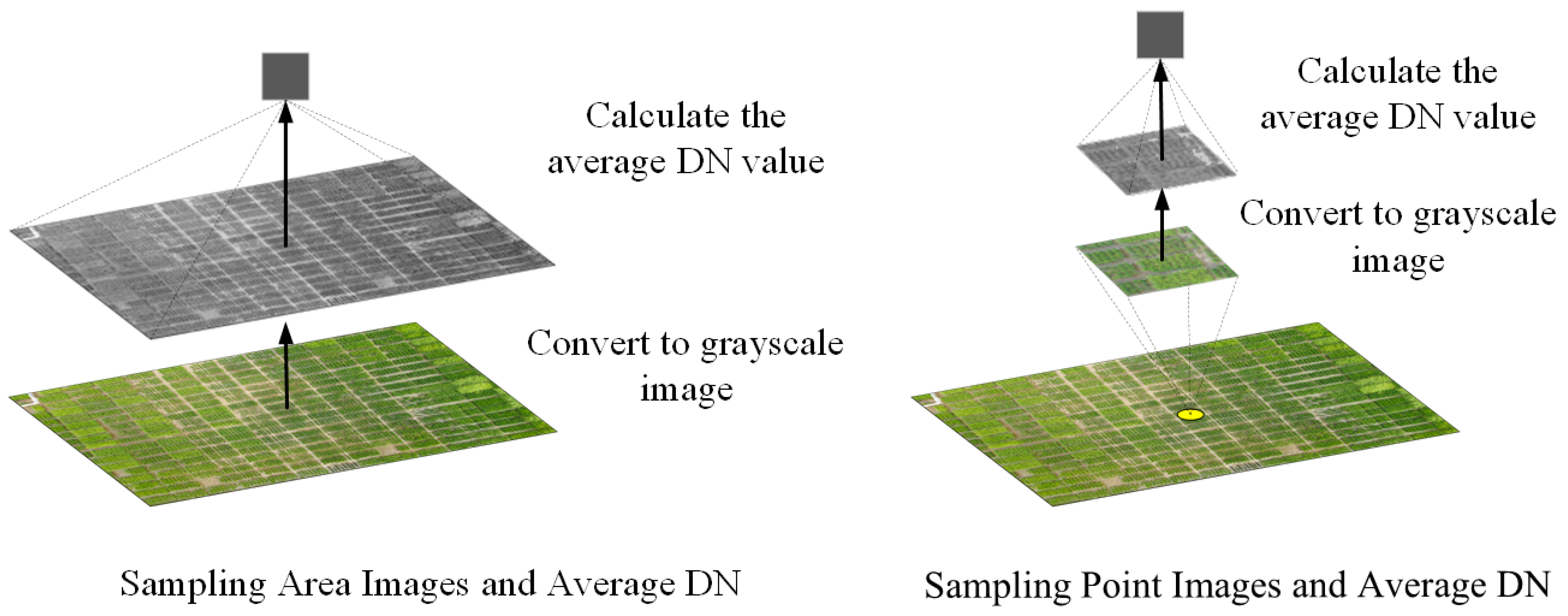
2.1. Reduction Method
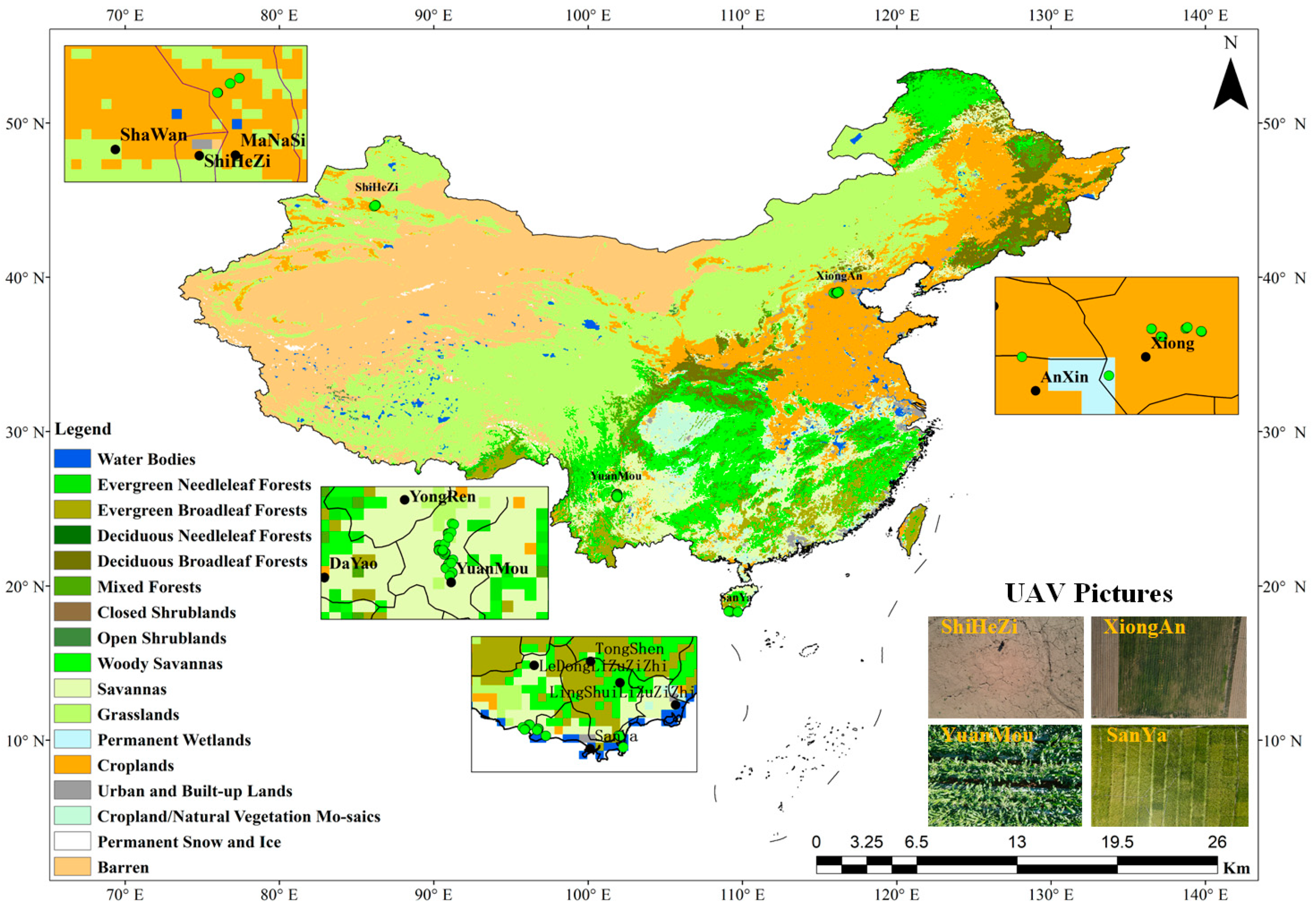
2.2. UAV Image Data
2.3. Dataset Construction
3. Methods and Evaluation Indicators
3.1. Traditional Scale Conversion Methods
3.2. ResTransformer Deep Learning Model
3.3. Hyperparameter Setting
3.4. Evaluation Indicators
4. Results and Discussion
4.1. Accuracy Verification of Various Scale Conversion Methods
4.2. Effect of the Number of Sampling Points and Sample Area on the Accuracy of Scale Conversion Results
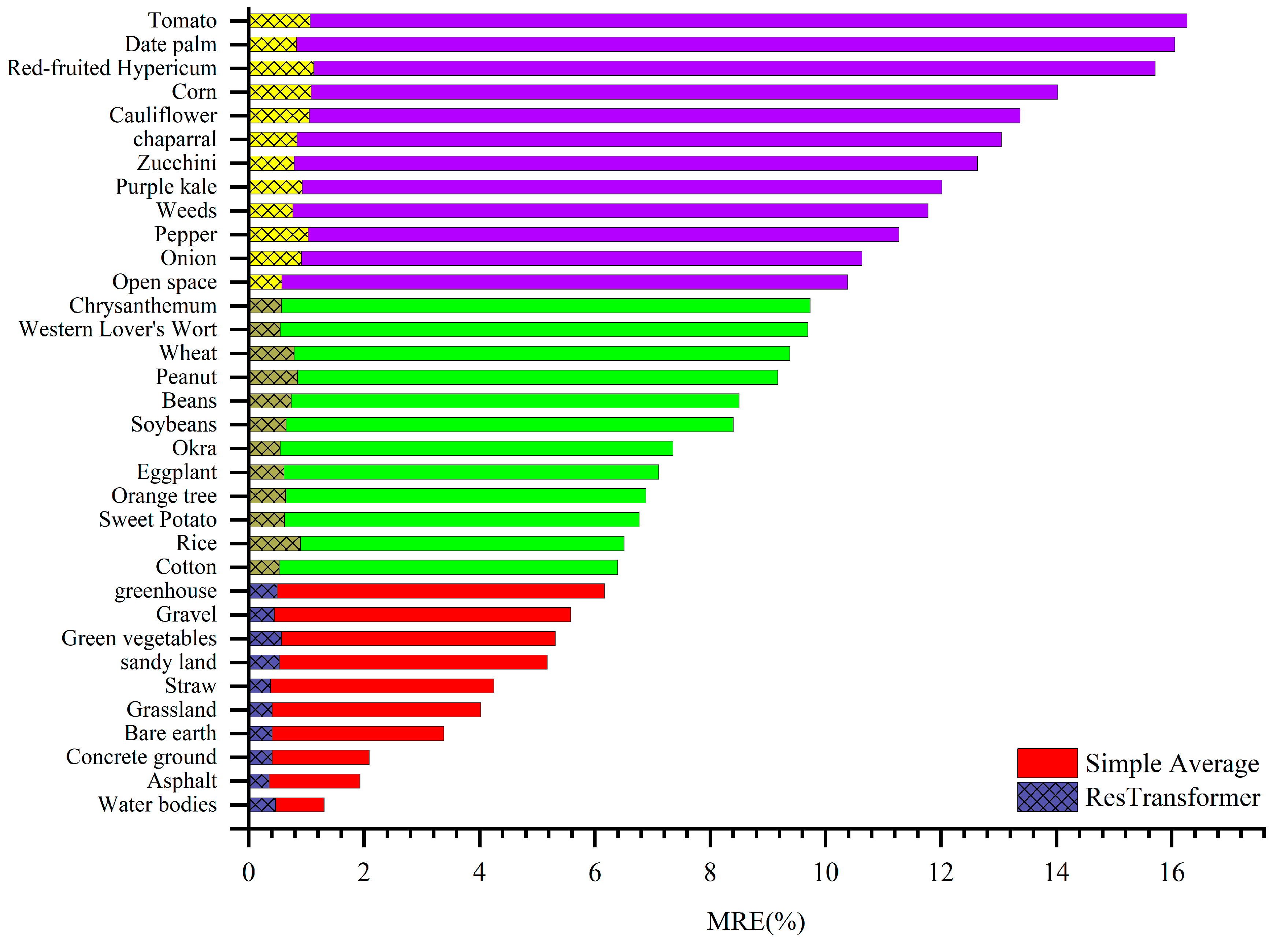
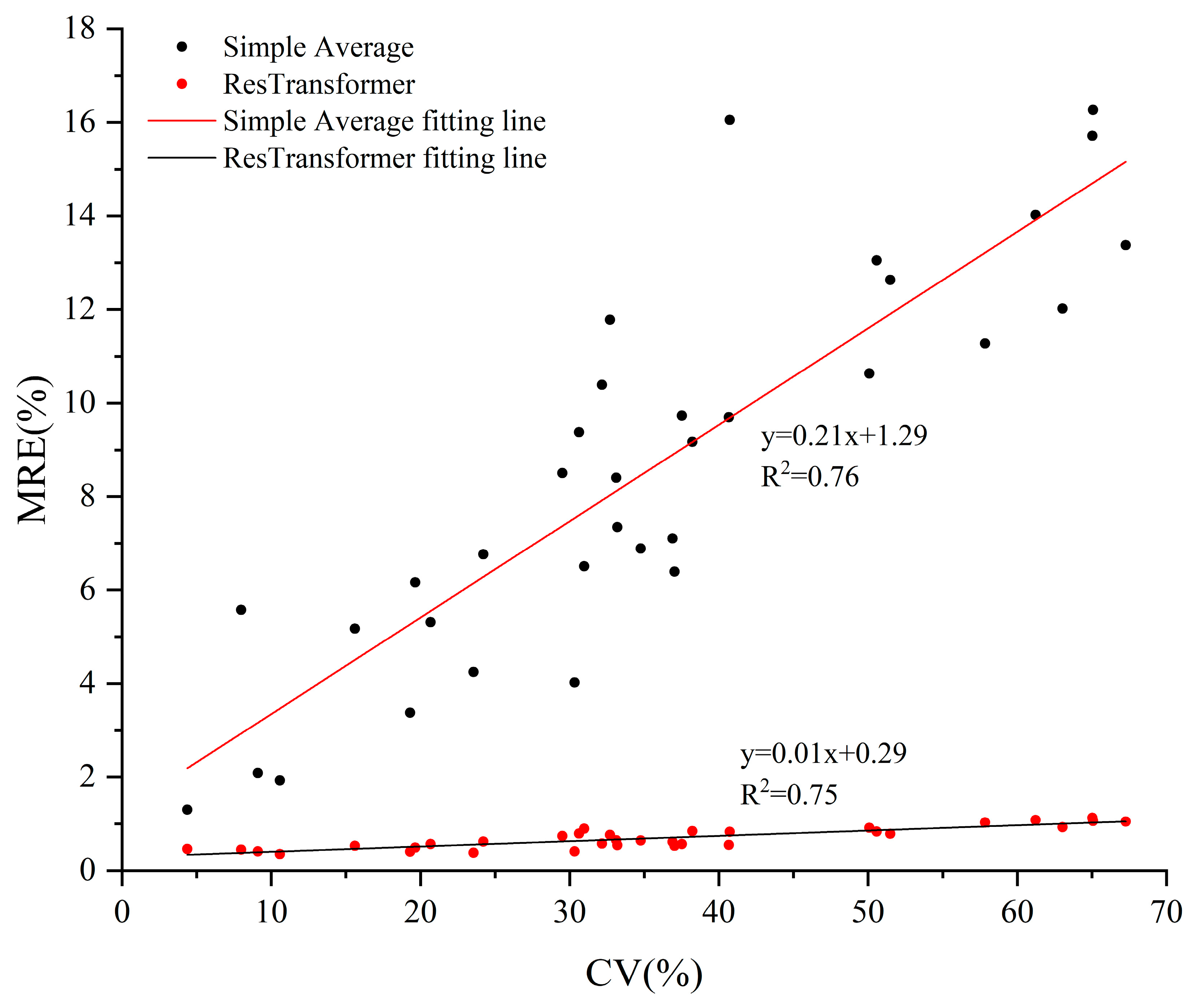
4.3. Effect of Different Sub-Bedding Surfaces on the Accuracy of Scale Conversion Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- DeCoffe, L.J.R.; Conran, D.N.; Bauch, T.D.; Ross, M.G.; Kaputa, D.S.; Salvaggio, C. Initial Performance Analysis of the At-Altitude Radiance Ratio Method for Reflectance Conversion of Hyperspectral Remote Sensing Data. Sensors 2023, 23, 320. [Google Scholar] [CrossRef] [PubMed]
- Hao, D.; Xiao, Q.; Wen, J.; You, D.; Wu, X.; Lin, X.; Wu, S. Advances in upscaling methods of quantitative remote sensing. J. Remote Sens. 2018, 22, 408–423. [Google Scholar]
- Meng, B.; Wang, J. A Review on the Methodology of Scaling with Geo-Data. Acta Geogr. Sin. 2005, 60, 277–288. [Google Scholar]
- Luan, H.; Tian, Q.; Yu, T.; Hu, X.; Huang, Y.; Liu, L.; Du, L.; Wei, X. Review of Up-scaling of Quantitative Remote Sensing. Adv. Earth Sci. 2013, 28, 657–664. [Google Scholar]
- Wu, X.; Wen, J.; Xiao, Q.; Li, X.; Liu, Q.; Tang, Y.; Dou, B.; Peng, J.; You, D.; Li, X. Advances in validation methods for remote sensing products of land surface parameters. J. Remote Sens. 2015, 19, 75–92. [Google Scholar]
- Yu, Y.; Pan, Y.; Yang, X.G.; Fan, W.Y. Spatial Scale Effect and Correction of Forest Aboveground Biomass Estimation Using Remote Sensing. Remote Sens. 2022, 14, 2828. [Google Scholar] [CrossRef]
- Naethe, P.; Asgari, M.; Kneer, C.; Knieps, M.; Jenal, A.; Weber, I.; Moelter, T.; Dzunic, F.; Deffert, P.; Rommel, E.; et al. Calibration and Validation from Ground to Airborne and Satellite Level: Joint Application of Time-Synchronous Field Spectroscopy, Drone, Aircraft and Sentinel-2 Imaging. Pfg-J. Photogramm. Remote Sens. Geoinf. Sci. 2023, 91, 43–58. [Google Scholar] [CrossRef]
- Tang, H.Z.; Xie, J.F.; Chen, W.; Zhang, H.G.; Wang, H.Y. Absolute Radiometric Calibration of ZY3-02 Satellite Multispectral Imager Based on Irradiance-Based Method. Remote Sens. 2023, 15, 448. [Google Scholar] [CrossRef]
- Tang, H.Z.; Xie, J.F.; Tang, X.M.; Chen, W.; Li, Q. On-Orbit Radiometric Performance of GF-7 Satellite Multispectral Imagery. Remote Sens. 2022, 14, 886. [Google Scholar] [CrossRef]
- Thome, K.J. Absolute radiometric calibration of Landsat 7 ETM+ using the reflectance-based method. Remote Sens. Environ. 2001, 78, 27–38. [Google Scholar] [CrossRef]
- Hufkens, K.; Bogaert, J.; Dong, Q.H.; Lu, L.; Huang, C.L.; Ma, M.G.; Che, T.; Li, X.; Veroustraete, F.; Ceulemans, R. Impacts and uncertainties of upscaling of remote-sensing data validation for a semi-arid woodland. J. Arid. Environ. 2008, 72, 1490–1505. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, J.; Qin, J.; Qu, Y. An Upscaling Algorithm to Obtain the Representative Ground Truth of LAI Time Series in Heterogeneous Land Surface. Remote Sens. 2015, 7, 12887–12908. [Google Scholar] [CrossRef]
- Wang, K.C.; Liu, J.M.; Zhou, X.J.; Sparrow, M.; Ma, M.; Sun, Z.; Jiang, W.H. Validation of the MODIS global land surface albedo product using ground measurements in a semidesert region on the Tibetan Plateau. J. Geophys. Res. Atmos. 2004, 109. [Google Scholar] [CrossRef]
- Li, X.; Jin, R.; Liu, S.; Ge, Y.; Xiao, Q.; Liu, Q.; Ma, M.; Ran, Y. Upscaling research in HiWATER: Progress and prospects. J. Remote Sens. 2016, 20, 921–932. [Google Scholar]
- Crow, W.T.; Ryu, D.; Famiglietti, J.S. Upscaling of field-scale soil moisture measurements using distributed land surface modeling. Adv. Water Resour. 2005, 28, 1–14. [Google Scholar] [CrossRef]
- Qin, J.; Yang, K.; Lu, N.; Chen, Y.; Zhao, L.; Han, M. Spatial upscaling of in-situ soil moisture measurements based on MODIS-derived apparent thermal inertia. Remote Sens. Environ. 2013, 138, 1–9. [Google Scholar] [CrossRef]
- Wu, X.; Wen, J.; Xiao, Q.; Liu, Q.; Peng, J.; Dou, B.; Li, X.; You, D.; Tang, Y.; Liu, Q. Coarse scale in situ albedo observations over heterogeneous snow-free land surfaces and validation strategy: A case of MODIS albedo products preliminary validation over northern China. Remote Sens. Environ. 2016, 184, 25–39. [Google Scholar] [CrossRef]
- Li, X. Characterization, controlling, and reduction of uncertainties in the modeling and observation of land-surface systems. Sci. China-Earth Sci. 2014, 57, 80–87. [Google Scholar] [CrossRef]
- Erickson, T.A.; Williams, M.W.; Winstral, A. Persistence of topographic controls on the spatial distribution of snow in rugged mountain terrain, Colorado, United States. Water Resour. Res. 2005, 41. [Google Scholar] [CrossRef]
- Hengl, T.; Heuvelink, G.B.M.; Rossiter, D.G. About regression-kriging: From equations to case studies. Comput. Geosci. 2007, 33, 1301–1315. [Google Scholar] [CrossRef]
- Wen, J.; Liu, Q.; Liu, Q.; Xiao, Q.; Li, X. Scale effect and scale correction of land-surface albedo in rugged terrain. Int. J. Remote Sens. 2009, 30, 5397–5420. [Google Scholar] [CrossRef]
- Christakos, G.; Kolovos, A.; Serre, M.L.; Vukovich, F. Total ozone mapping by integrating databases from remote sensing instruments and empirical models. IEEE Trans. Geosci. Remote Sens. 2004, 42, 991–1008. [Google Scholar] [CrossRef]
- Gao, S.; Zhu, Z.; Liu, S.; Jin, R.; Yang, G.; Tan, L. Estimating the spatial distribution of soil moisture based on Bayesian maximum entropy method with auxiliary data from remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 54–66. [Google Scholar] [CrossRef]
- Du, J.; Zhou, H.H.; Jacinthe, P.A.; Song, K.S. Retrieval of lake water surface albedo from Sentinel-2 remote sensing imagery. J. Hydrol. 2023, 617, 128904. [Google Scholar] [CrossRef]
- Liang, S.L.; Fang, H.L.; Chen, M.Z.; Shuey, C.J.; Walthall, C.; Daughtry, C.; Morisette, J.; Schaaf, C.; Strahler, A. Validating MODIS land surface reflectance and albedo products: Methods and preliminary results. Remote Sens. Environ. 2002, 83, 149–162. [Google Scholar] [CrossRef]
- Yue, X.Y.; Li, Z.Q.; Li, H.L.; Wang, F.T.; Jin, S. Multi-Temporal Variations in Surface Albedo on Urumqi Glacier No.1 in Tien Shan, under Arid and Semi-Arid Environment. Remote Sens. 2022, 14, 808. [Google Scholar] [CrossRef]
- Sanchez-Zapero, J.; Martinez-Sanchez, E.; Camacho, F.; Wang, Z.S.; Carrer, D.; Schaaf, C.; Garcfa-Haro, F.J.; Nickeson, J.; Cosh, M. Surface ALbedo VALidation (SALVAL) Platform: Towards CEOS LPV Validation Stage 4-Application to Three Global Albedo Climate Data Records. Remote Sens. 2023, 15, 1081. [Google Scholar] [CrossRef]
- Jin, R.; Li, X.; Liu, S.M. Understanding the Heterogeneity of Soil Moisture and Evapotranspiration Using Multiscale Observations From Satellites, Airborne Sensors, and a Ground-Based Observation Matrix. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2132–2136. [Google Scholar] [CrossRef]
- Bachmann, C.M.; Montes, M.J.; Parrish, C.E.; Fusina, R.A.; Nichols, C.R.; Li, R.R.; Hallenborg, E.; Jones, C.A.; Lee, K.; Sellars, J.; et al. A dual-spectrometer approach to reflectance measurements under sub-optimal sky conditions. Opt. Express 2012, 20, 8959–8973. [Google Scholar] [CrossRef]
- Francos, N.; Ben-Dor, E. A transfer function to predict soil surface reflectance from laboratory soil spectral libraries. Geoderma 2022, 405, 115432. [Google Scholar] [CrossRef]
- Lee, Z.P.; Ahn, Y.H.; Mobley, C.; Arnone, R. Removal of surface-reflected light for the measurement of remote-sensing reflectance from an above-surface platform. Opt. Express 2010, 18, 26313–26324. [Google Scholar] [CrossRef]
- Glasser, C.; Selman, A.L.; Sengupta, S. Reductions between disjoint NP-pairs. Inf. Comput. 2005, 200, 247–267. [Google Scholar] [CrossRef]
- Buhrman, H.; Fortnow, L.; Hitchcock, J.M.; Loff, B. Learning Reductions to Sparse Sets. In Proceedings of the 38th International Symposium on Mathematical Foundations of Computer Science (MFCS), IST Austria, Klosterneuburg, Austria, 26–30 August 2013; pp. 243–253. [Google Scholar]
- Hitchcock, J.M.; Shafei, H. Nonuniform Reductions and NP-Completeness. Theory Comput. Syst. 2022, 66, 743–757. [Google Scholar] [CrossRef]
- Campelo, M.; Campos, V.A.; Correa, R.C. On the asymmetric representatives formulation for the vertex coloring problem. Discret. Appl. Math. 2008, 156, 1097–1111. [Google Scholar] [CrossRef]
- Zhu, E.Q.; Jiang, F.; Liu, C.J.; Xu, J. Partition Independent Set and Reduction-Based Approach for Partition Coloring Problem. IEEE Trans. Cybern. 2022, 52, 4960–4969. [Google Scholar] [CrossRef] [PubMed]
- Cao, C.; Lee, X.; Muhlhausen, J.; Bonneau, L.; Xu, J.P. Measuring Landscape Albedo Using Unmanned Aerial Vehicles. Remote Sens. 2018, 10, 1812. [Google Scholar] [CrossRef]
- Duan, S.B.; Li, Z.L.; Tang, B.H.; Wu, H.; Ma, L.L.; Zhao, E.Y.; Li, C.R. Land Surface Reflectance Retrieval from Hyperspectral Data Collected by an Unmanned Aerial Vehicle over the Baotou Test Site. PLoS ONE 2013, 8, e66972. [Google Scholar] [CrossRef]
- Wang, R.; Gamon, J.A.; Hmimina, G.; Cogliati, S.; Zygielbaum, A.I.; Arkebauer, T.J.; Suyker, A. Harmonizing solar induced fluorescence across spatial scales, instruments, and extraction methods using proximal and airborne remote sensing: A multi-scale study in a soybean field. Remote Sens. Environ. 2022, 281, 113268. [Google Scholar] [CrossRef]
- Helder, D.; Thome, K.; Aaron, D.; Leigh, L.; Czapla-Myers, J.; Leisso, N.; Biggar, S.; Anderson, N. Recent surface reflectance measurement campaigns with emphasis on best practices, SI traceability and uncertainty estimation. Metrologia 2012, 49, S21–S28. [Google Scholar] [CrossRef]
- Walsh, A.J.; Byrne, G.; Broomhall, M. A Case Study of Measurement Uncertainty in Field Spectroscopy. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6248–6258. [Google Scholar] [CrossRef]
- Krichen, M.; Mihoub, A.; Alzahrani, M.Y.; Adoni, W.Y.H.; Nahhal, T. Are Formal Methods Applicable To Machine Learning And Artificial Intelligence? In Proceedings of the 2022 2nd International Conference of Smart Systems and Emerging Technologies (SMARTTECH), Riyadh, Saudi Arabia, 9–11 May 2022; pp. 48–53. [Google Scholar]
- Seshia, S.A.; Sadigh, D.; Sastry, S.S. Toward verified artificial intelligence. Commun. ACM 2022, 65, 46–55. [Google Scholar] [CrossRef]
- Sun, H.; Pan, J.; Gao, H.L.; Jiang, P.; Dou, X.G.; Wang, K.S.; Chen, L.; Li, L.; Han, Q.J. Sampling Method and Accuracy of Pixel-Scale Surface Reflectance at Dunhuang Site. Laser Optoelectron. Prog. 2022, 59, 1028009. [Google Scholar] [CrossRef]
- Hengl, T.; Heuvelink, G.B.M.; Stein, A. A generic framework for spatial prediction of soil variables based on regression-kriging. Geoderma 2004, 120, 75–93. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. A tutorial guide to geostatistics: Computing and modelling variograms and kriging. Catena 2014, 113, 56–69. [Google Scholar] [CrossRef]
- Pebesma, E.J. Multivariable geostatistics in S: The gstat package. Comput. Geosci. 2004, 30, 683–691. [Google Scholar] [CrossRef]
- Bogdanov, V.V.; Volkov, Y.S. Near-optimal tension parameters in convexity preserving interpolation by generalized cubic splines. Numer. Algorithms 2021, 86, 833–861. [Google Scholar] [CrossRef]
- Dai, X.; Wang, G.; Wang, P. Wavelet Sampling and Meteorological Record Interpolation. Chin. J. Comput. Phys. 2003, 20, 529–536. [Google Scholar]
- Duan, Q.; Djidjeli, K.; Price, W.G.; Twizell, E.H. Weighted rational cubic spline interpolation and its application. J. Comput. Appl. Math. 2000, 117, 121–135. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. In Proceedings of the 31st Annual Conference on Neural Information Processing Systems (NIPS), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Devlin, J.; Chang, M.-W.; Lee, K.; Toutanova, K.; Assoc Computat, L. BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding. In Proceedings of the North-American-Chapter of the Association-for-Computational-Linguistics—Human Language Technologies (NAACL-HLT), Minneapolis, MN, USA, 2–7 June 2019; pp. 4171–4186. [Google Scholar]
- Raffel, C.; Shazeer, N.; Roberts, A.; Lee, K.; Narang, S.; Matena, M.; Zhou, Y.; Li, W.; Liu, P.J. Exploring the Limits of Transfer Learning with a Unified Text-to-Text Transformer. J. Mach. Learn. Res. 2020, 21, 5485–5551. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows. In Proceedings of the 18th IEEE/CVF International Conference on Computer Vision (ICCV), Electr Network, Online, 11–17 October 2021; pp. 9992–10002. [Google Scholar]
- Liu, Z.; Hu, H.; Lin, Y.; Yao, Z.; Xie, Z.; Wei, Y.; Ning, J.; Cao, Y.; Zhang, Z.; Dong, L.; et al. Swin Transformer V2: Scaling Up Capacity and Resolution. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 11999–12009. [Google Scholar]
- Nocedal, J.; Keskar, N.; Mudigere, D.; Tang, P.; Smelyanskiy, M. Large-Batch Training for Deep Learning: Generalization Gap and Sharp Minima. arXiv 2017, arXiv:1609.04836. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Type | Num | Area km2 | Feature Type | Num | Area km2 | Feature Type | Num | Area km2 |
|---|---|---|---|---|---|---|---|---|
| Chili | 56 | 1.83 × 100 | Corn | 211 | 6.09 × 100 | Sweet potato | 36 | 2.16 × 100 |
| Rice | 143 | 1.52 × 101 | Eggplant | 6 | 3.08× 101 | Orange trees | 42 | 1.10 × 100 |
| Wheat | 52 | 1.56 × 101 | Cauliflower | 48 | 1.26 × 100 | Water bodies | 73 | 3.69 × 100 |
| Grassland | 136 | 4.92 × 100 | Peanut | 11 | 2.00× 101 | Chrysanthemum | 20 | 8.02× 101 |
| Cotton | 8 | 3.01 × 101 | Soybean | 15 | 3.21× 101 | green cabbage | 12 | 2.35 × 100 |
| Zucchini | 74 | 3.33 × 100 | Sandy | 56 | 8.36 × 100 | Lover’s Grass | 88 | 1.96 × 100 |
| Concrete | 65 | 7.38 × 100 | Tomatoes | 222 | 6.14 × 100 | Fluffy grass | 185 | 4.87 × 100 |
| Greenhouse | 86 | 4.94 × 100 | Bare soil | 482 | 3.39× 101 | Golden peach | 60 | 3.63 × 100 |
| Okra | 5 | 3.40 × 101 | Date palm | 2 | 3.53× 101 | Purple kale | 111 | 2.89 × 100 |
| Pitch | 16 | 1.14 × 101 | Open space | 2 | 2.68× 101 | Green onions | 132 | 5.98 × 100 |
| Beans | 14 | 2.82 × 100 | Gravel | 2 | 3.15× 101 | |||
| Weeds | 12 | 7.87 × 102 | Straw | 47 | 2.77 × 100 |
| Name | Input Shape | Output Shape | Flops | Flops Percentage | Params |
|---|---|---|---|---|---|
| Head | [3, 224, 224] | [64, 128, 128] | 1.20 × 108 | 6.008% | 9.54 × 103 |
| Head Small | [48, 56, 56] | [64, 28, 28] | 1.19 × 108 | 5.973% | 1.51 × 105 |
| Resnet Block 1 | [64, 128, 128] | [64, 56, 56] | 4.64 × 108 | 23.327% | 1.48 × 105 |
| Resnet Block 2 | [64, 56, 56] | [128, 28, 28] | 4.12 × 108 | 20.706% | 5.26 × 105 |
| Resnet Block 3 | [128, 28, 28] | [256, 14, 14] | 4.12 × 108 | 20.676% | 2.10 × 106 |
| Resnet Block 2 Small | [64, 28, 28] | [64, 14, 14] | 4.27 × 108 | 21.467% | 8.72 × 106 |
| Resnet Block 4 | [320, 14, 14] | [512, 7, 7] | 2.99 × 107 | 1.500% | 1.52 × 105 |
| Swin Transformer Block v2 | [49, 256] | [49, 256] | 6.81 × 106 | 0.342% | 1.51 × 105 |
| Linear | [49, 256] | [1] | 1.75 × 104 | 0.001% | 1.75 × 104 |
| TOTAL | - | - | 1.99 × 109 | 100% | 1.20 × 107 |
| Method Name | Avg MRE (%) | Avg RMSE | Avg IQR MRE (%) | Avg IQR RMSE | Median MRE (%) | Median RMSE | R |
|---|---|---|---|---|---|---|---|
| Simple Average | 8.56704 | 9.8842 | 6.16947 | 7.43261 | 4.58799 | 5.67452 | 0.85693 |
| Cubic Spline Interpolation | 49.77202 | 61.78559 | 31.22144 | 39.93744 | 28.46038 | 31.0651 | 0.40127 |
| Ordinary Kriging | 8.60315 | 9.9272 | 6.20061 | 7.49048 | 4.62784 | 5.71912 | 0.85527 |
| ResTransformer | 0.6440 | 0.7460 | 0.52335 | 0.62297 | 0.6440 | 0.5490 | 0.99911 |
| Scale Conversion Method | Sample Area Edge Length (m) | R | Scale Conversion Method | Sample Area Edge Length (m) | R |
|---|---|---|---|---|---|
| Simple Average | 2 | −0.8618 | ResTransformer | 2 | −0.7048 |
| 4 | −0.8431 | 4 | −0.7299 | ||
| 8 | −0.8455 | 8 | −0.7987 | ||
| 10 | −0.8211 | 10 | −0.7461 | ||
| 20 | −0.8626 | 20 | −0.7371 | ||
| 30 | −0.8526 | 30 | −0.7627 |
| Scale Conversion Method | Number of Sampling Points | R | Scale Conversion Method | Number of Sampling Points | R |
|---|---|---|---|---|---|
| Simple Average | 1 | −0.4412 | ResTransformer | 1 | −0.6118 |
| 2 | −0.0008 | 2 | 0.0346 | ||
| 4 | −0.1703 | 4 | 0.0061 | ||
| 5 | −0.1515 | 5 | 0.5472 | ||
| 9 | 0.3204 | 9 | 0.5243 | ||
| 16 | 0.5300 | 16 | 0.5608 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, X.; Gao, H.; Wang, Y.; Zhang, W.; Shi, X.; Lv, F.; Yu, Y.; Luan, Z.; Wang, Q.; Zhao, X. A Scale Conversion Model Based on Deep Learning of UAV Images. Remote Sens. 2023, 15, 2449. https://doi.org/10.3390/rs15092449
Qiu X, Gao H, Wang Y, Zhang W, Shi X, Lv F, Yu Y, Luan Z, Wang Q, Zhao X. A Scale Conversion Model Based on Deep Learning of UAV Images. Remote Sensing. 2023; 15(9):2449. https://doi.org/10.3390/rs15092449
Chicago/Turabian StyleQiu, Xingchen, Hailiang Gao, Yixue Wang, Wei Zhang, Xinda Shi, Fengjun Lv, Yanqiu Yu, Zhuoran Luan, Qianqian Wang, and Xiaofei Zhao. 2023. "A Scale Conversion Model Based on Deep Learning of UAV Images" Remote Sensing 15, no. 9: 2449. https://doi.org/10.3390/rs15092449
APA StyleQiu, X., Gao, H., Wang, Y., Zhang, W., Shi, X., Lv, F., Yu, Y., Luan, Z., Wang, Q., & Zhao, X. (2023). A Scale Conversion Model Based on Deep Learning of UAV Images. Remote Sensing, 15(9), 2449. https://doi.org/10.3390/rs15092449