
The Development of a Low-Cost Hydrophone for Passive Acoustic Monitoring of Dolphin’s Vocalizations

 ,
,  ,
,  , , and
, , and 
Abstract
1. Introduction
2. Materials and Methods
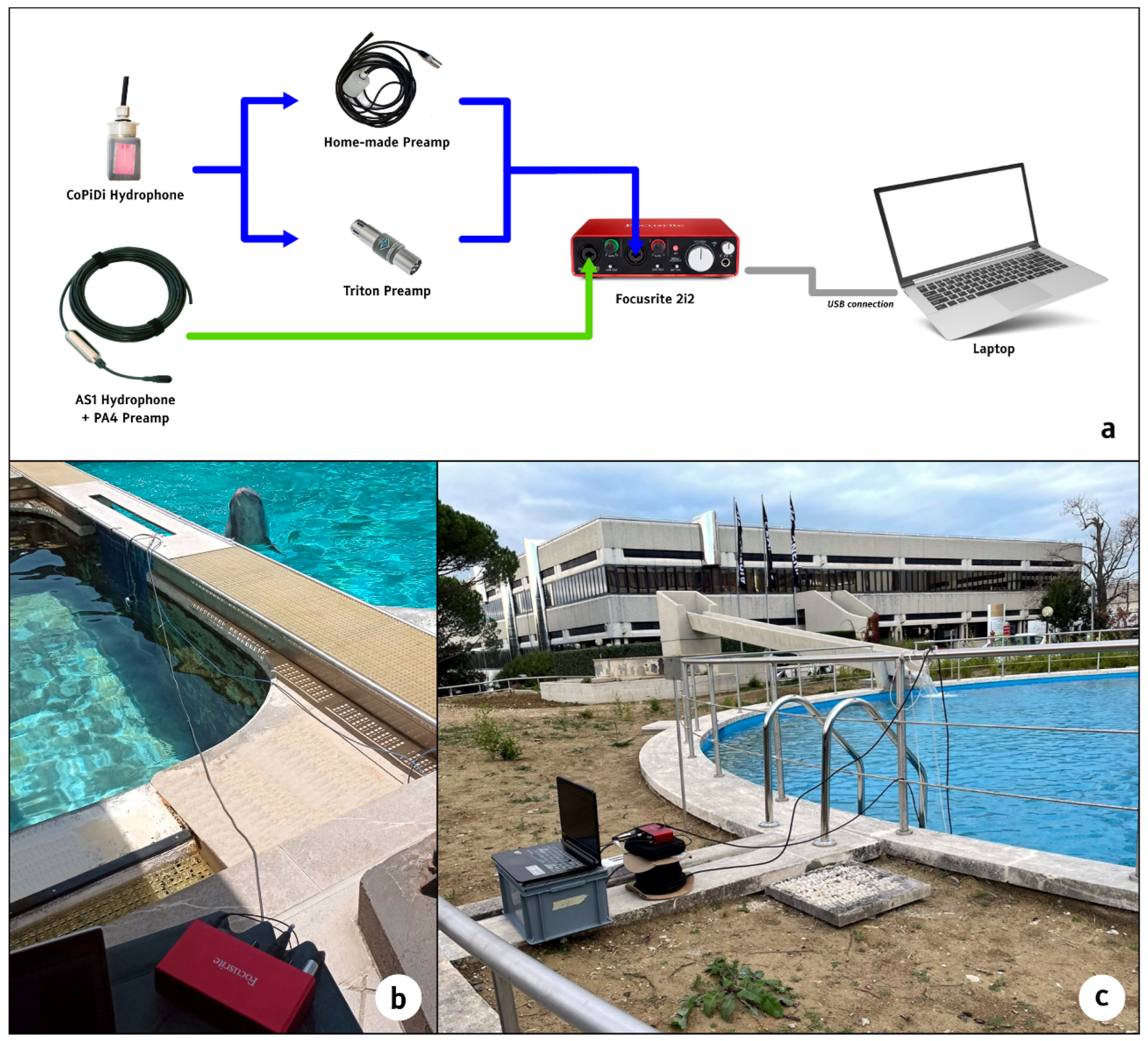
2.1. Hardware Architecture
2.1.1. The Hydrophone
2.1.2. The Preamplifier
2.2. Experimental Validation
2.2.1. Recording of Artificial Acoustic Signals
- A homemade signal source device consisting of a piezo disk mounted inside a floating metallic can (diameter 7 cm and height 4 cm) and powered by a Tektronix CFG253 signal generator. This device generates cyclically variable 20-Vpp sine waveform signals with a frequency in the interval between 0 and 100 kHz (ramp signal). The cycle duration is 1.7 s;
- An acoustic deterrent device or “pinger” (DDD, manufactured by S.T.M. Products, Italy) with remote wired activation, emitting sounds within the frequency range of 5 to 500 kHz with an emission power of 165 dB (1 µPa @ 1 m) and operating at a depth of 70 cm. The device produces multiple sweeping signals and a 30-s cycle of multitone impulses (Figure 4). The multitone impulses were analyzed in the experimental activities.
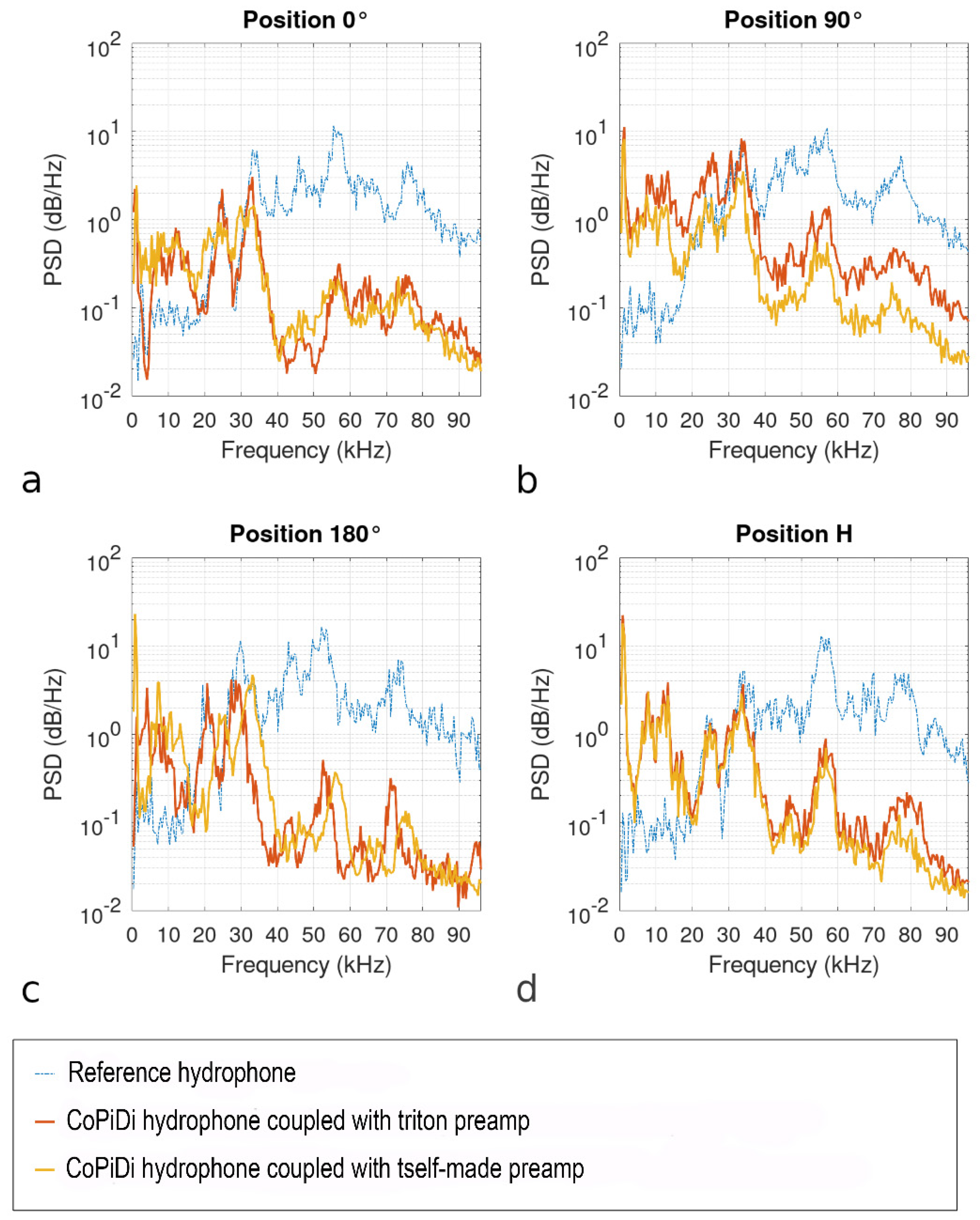
- The first piezo disk is orthogonal to the direction of the emission; the other disk is on the opposite side of the device—position 0°;
- Both piezo disks are parallel to the direction of the emission—position 90°;
- The second piezo disk is orthogonal to the direction of the emission and the other disk is on the opposite side of the device—position 180°;
- The sound emission strikes the bottom part of the hydrophone orthogonally–horizontal (H).
2.2.2. Recording Dolphin Vocalizations
2.3. Data Analysis
2.3.1. Artificial Acoustic Signals
- For ramp signals, the Fourier Transform (FFT, size = 1024) was computed in 7-ms windows in order to provide the power spectral density (PSD). A 7-ms window was chosen because the frequency is considered stable in this interval. The CoPiDi hydrophone’s performance was evaluated by comparing its PSD to that of the reference. Wave files were processed using GNU Octave software;
- For multitone signals, 30 s of the recorded signal were processed in order to extract a series of single multitone segments of variable length as follows: the signal was scanned to identify the samples where the signal amplitude is ≈0 dB (no signal) in the whole frequency range (0–96 kHz). These no-signal areas were then used to split the whole signal in the multitone segments. Each segment is composed of consecutive signal-area samples (signal amplitude > 0) included between two successive no-signal areas. The Fourier transform (FFT, size = 1024) and PSD were then computed in each single segment. PSD values exceeding the empirically identified threshold of 3.50 × 10−3 dB/Hz (used to filter out noise) were compared between the proposed and reference hydrophones. The GNU Octave software was used for this processing.
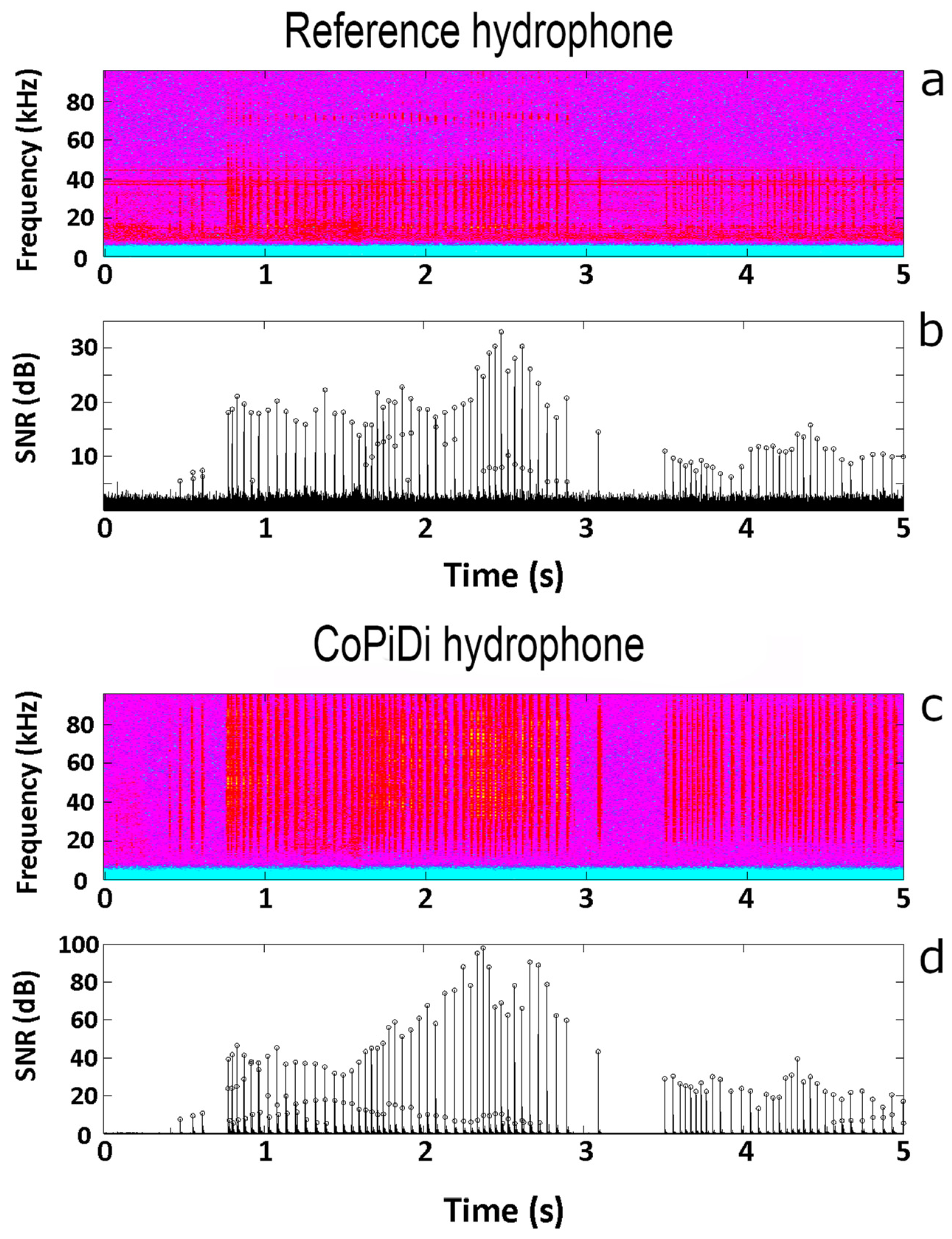
2.3.2. Dolphin Vocalizations
Click Identification
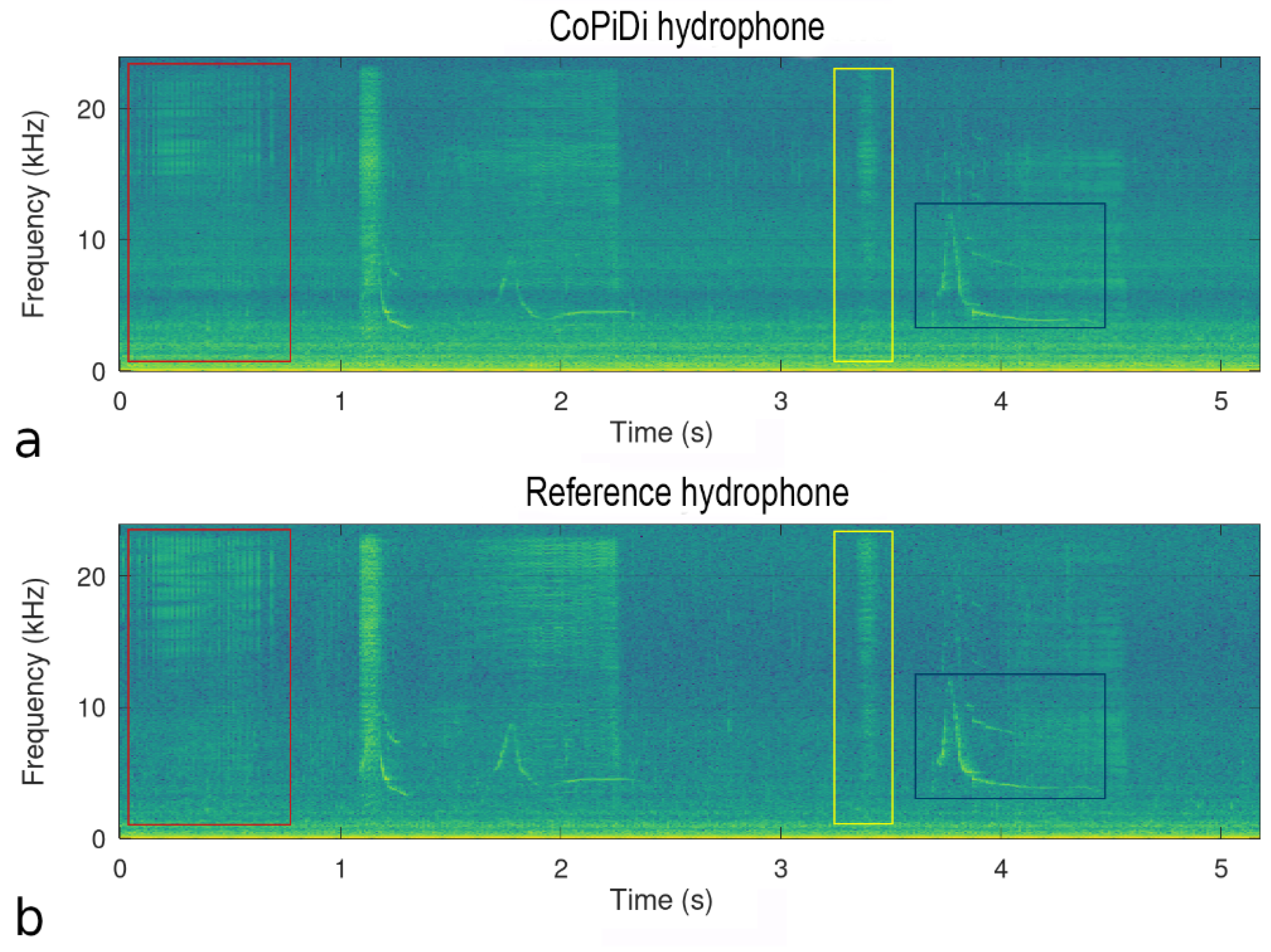
Identification of Whistles and Burst Pulse Signals
2.4. Preamplifier Validation
3. Results
3.1. Artificial Acoustic Signals
3.2. Dolphin Vocalizations
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- André, M.; van der Schaar, M.; Zaugg, S.; Houégnigan, L.; Sánchez, A.M.; Castell, J.V. Listening to the Deep: Live monitoring of ocean noise and cetacean acoustic signals. Mar. Pollut. Bull. 2011, 63, 18–26. [Google Scholar] [CrossRef] [PubMed]
- Jog, K.; Sutaria, D.; Diedrich, A.; Grech, A.; Marsh, H. Marine mammal interactions with fisheries: Review of research and management trends across commercial and small-scale fisheries. Front. Mar. Sci. 2022, 9, 758013. [Google Scholar] [CrossRef]
- Li Veli, D.; Petetta, A.; Barone, G.; Ceciarini, I.; Franchi, E.; Marsili, L.; Pietroluongo, G.; Mazzoldi, C.; Holcer, D.; D’Argenio, S.; et al. Fishers’ Perception on the Interaction between Dolphins and Fishing Activities in Italian and Croatian Waters. Diversity 2023, 15, 133. [Google Scholar] [CrossRef]
- Díaz López, B. Whistle characteristics in free-ranging bottlenose dolphins (Tursiops truncatus) in the Mediterranean Sea: Influence of behaviour. Mamm. Biol. 2011, 76, 180–189. [Google Scholar] [CrossRef]
- Luís, A.R.; May-Collado, L.J.; Rako-Gospić, N.; Gridley, T.; Papale, E.; Azevedo, A.; Silva, M.A.; Buscaino, G.; Herzing, D.; Santos, M.E.D. Vocal universals and geographic variations in the acoustic repertoire of the com-mon bottlenose dolphin. Sci. Rep. 2021, 11, 11847. [Google Scholar] [CrossRef] [PubMed]
- Marley, S.; Erbe, C.; Kent, C. Underwater recordings of the whistles of bottlenose dolphins in Fremantle Inner Harbour, Western Australia. Sci. Data 2017, 4, 170126. [Google Scholar] [CrossRef]
- Simon, M.; Nuuttila, H.; Reyes-Zamudio, M.M.; Ugarte, F.; Verfuss, U.; Evans, P.G.H. Passive acoustic monitoring of bottlenose dolphin and harbour porpoise, in Cardigan Bay, Wales, with implications for habitat use and partitioning. J. Mar. Biol. Assoc. UK 2010, 90, 1539–1545. [Google Scholar] [CrossRef]
- Mellinger, D.K.; Stafford, K.M.; Moore, S.E.; Dziak, R.P.; Matsumoto, H. An overview of fixed passive acoustic observation methods for cetaceans. Oceanography 2007, 20, 36–45. [Google Scholar] [CrossRef]
- Sousa-Lima, R.S.; Norris, T.F.; Oswald, J.N.; Fernandes, D.P. A review and inventory of fixed autonomous recorders for passive acoustic monitoring of marine mammals. Aquat. Mamm. 2013, 39, 23. [Google Scholar] [CrossRef]
- Marino, L.; Connor, R.C.; Fordyce, R.E.; Herman, L.M.; Hof, P.R.; Lefebvre, L.; Lusseau, D.; McCowan, B.; Nimchinsky, E.A.; Pack, A.A.; et al. Cetaceans have complex brains for complex cognition. PLoS Biol. 2007, 5, 966–972. [Google Scholar] [CrossRef]
- Janik, V.M.; Slater, P.J. The different roles of social learning in vocal communication. Anim. Behav. 2000, 60, 1–11. [Google Scholar] [CrossRef]
- Lammers, M.O.; Au, W.W.L. Directionality in the Whistles of Hawaiian Spinner Dolphins (Stenella Longirostris): A Signal Feature to Cue Direction of Movement? Mar. Mammal Sci. 2003, 19, 249–264. [Google Scholar] [CrossRef]
- Au, W.W.L. Echolocation signals of wild dolphins. Acoust. Phys. 2004, 50, 454–462. [Google Scholar] [CrossRef]
- Lammers, M.O.; Au, W.W.L.; Aubauer, R.; Nachtigall, P. A comparative analysis of the pulsed emissions of free-ranging Hawaiian spinner dolphins (Stenella longirostris). In Echolocation in Bats and Dolphins; University of Chicago Press: Chicago, IL, USA, 2004; pp. 414–419. [Google Scholar]
- Dos Santos, M.E.; Louro, S.; Couchinho, M.; Brito, C. Whistles of bottlenose dolphins (Tursiops truncatus) in the Sado Estuary, Portugal: Characteristics, Production Rates, and long-term contour stability. Aquat. Mamm. 2005, 31, 453–462. [Google Scholar] [CrossRef]
- Hernandez, E.N.; Solangi, M.; Kuczaj, S.A. Time and frequency parameters of bottlenose dolphin whistles as predictors of surface behavior in the Mississippi Sound. J. Acoust. Soc. Am. 2010, 127, 3232–3238. [Google Scholar] [CrossRef] [PubMed]
- Ivanov, M.P. Dolphin’s echolocation signals in a complicated acoustic environment. Acoust. Phys. 2004, 50, 469–479. [Google Scholar] [CrossRef]
- Overstrom, N.A. Association between burst-pulse sounds and aggressive behavior in captive Atlantic bottlenosed dolphins (Tursiops truncatus). Zoo Biol. 1983, 2, 93–103. [Google Scholar] [CrossRef]
- Jones, B.; Zapetis, M.; Samuelson, M.M.; Ridgway, S. Sounds produced by bottlenose dolphins (Tursiops): A review of the defining characteristics and acoustic criteria of the dolphin vocal repertoire. Bioacoustics 2020, 29, 399–440. [Google Scholar] [CrossRef]
- Gillespie, D.; Mellinger, D.; Gordon, J.; McLaren, D.; Redmond, P.; McHugh, R.; Trinder, P.W.; Deng, X.Y.; Thode, A. PAMGUARD: Semiautomated, open source software for real-time acoustic detection and localisation of cetaceans. J. Acoust. Soc. Am. 2008, 30, 54–62. [Google Scholar] [CrossRef]
- De Marco, R.; Di Nardo, F.; Lucchetti, A.; Virgili, M.; Petetta, A.; Li Veli, D.; Screpanti, L.; Bartolucci, V.; Scaradozzi, D. A low-cost approach in acoustic monitoring of dolphin presence. In Proceedings of the 2022 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea), Milazzo, Italy, 3–5 October 2022; pp. 303–307. [Google Scholar]
- Vivas, E.; Lopez, B.J. Construction, calibration, and field test of a home-made, low-cost hydrophone system for cetacean acoustic research. J. Acoust. Soc. Am. 2010, 128, 2438. [Google Scholar] [CrossRef]
- Craig, E.C. JFET Differential Amplifier. In Laboratory Manual for Electronics via Waveform Analysis; Springer: New York, NY, USA, 1994. [Google Scholar]
- Phantom Piezo Preamp. Available online: https://stompville.co.uk/?p=680 (accessed on 31 January 2023).
- FetHead Preamp for Ribbon and Dynamic Microphones. Available online: https://www.tritonaudio.com/fethead (accessed on 31 January 2023).
- Aquarian hydrophones. Available online: https://www.aquarianaudio.com (accessed on 31 January 2023).
- Zimmer, W.M.X. Passive Acoustic Monitoring of Cetaceans; Cambridge Univesity Press: Cambridge, UK, 2011. [Google Scholar]
- Lamont, T.A.C.; Chapuis, L.; Williams, B.; Dines, S.; Gridley, T.; Frainer, G.; Fearey, J.; Maulana, P.B.; Prasetya, M.E.; Jompa, J.; et al. HydroMoth: Testing a prototype low-cost acoustic recorder for aquatic environments. Remote Sens. Ecol. Conserv. 2022, 8, 362–378. [Google Scholar] [CrossRef]
- Saheban, H.; Kordrostami, Z. Hydrophones, fundamental features, design considerations, and various structures: A review. Sens. Actuator A Phys. 2021, 3291, 112790. [Google Scholar] [CrossRef]
- Akamatsu, T.; Wang, D.; Nakamura, K.; Wang, K. Echolocation range of captive and free-ranging baiji (Lipotes vexillifer), finless porpoise (Neophocaena phocaenoides), and bottlenose dolphin (Tursiops truncates). J. Acoust. Soc. Am. 1998, 104, 2511–2516. [Google Scholar] [CrossRef] [PubMed]
- Ryabov, V.A. The Study of Acoustic Signals and the Supposed Spoken Language of the Dolphins. St. Petersburg Polytech. Univ. J. Phys. Math. 2016, 2, 231–239. [Google Scholar]
- Díaz López, B.; Shirai, J.A.B. Mediterranean common bottlenose dolphin’s repertoire and communication use. In Dolphins: Anatomy, Behavior and Threats; Pearce, A.G., Correa, L.M., Eds.; Nova Science Publishers: New York, NY, USA, 2009; pp. 1–20. [Google Scholar]
- Baumann-Pickering, S.; Wiggins, S.M.; Hildebrand, J.A.; Roch, M.A.; Schnitzler, H.U. Discriminating features of echolocation clicks of melon-headed whales (Peponocephala electra), bottlenose dolphins (Tursiops truncatus), and Gray’s spinner dolphins (Stenella longirostris longirostris). J. Acoust. Soc. Am. 2010, 128, 2212–2224. [Google Scholar] [CrossRef] [PubMed]
- Au, W.W.L. The Sonar of Dolphins; Springer: New York, NY, USA, 1993. [Google Scholar]
- Finneran, J.J.; Branstetter, B.K.; Houser, D.S.; Moore, P.W.; Mulsow, J.; Martin, C.; Perisho, S. High resolution measurement of a bottlenose dolphin’s (Tursiops truncatus) biosonar transmission beam pattern in the horizontal plane. J. Acoust. Soc. Am. 2014, 136, 2025–2038. [Google Scholar] [CrossRef]
- Romeu, B.; Machado, A.M.S.; Daura-Jorge, F.G.; Cremer, M.J.; de Moraes Alves, A.K.; Simões-Lopes, P.C. Low-frequency sampling rates are effective to record bottlenose dolphins. R. Soc. Open Sci. 2021, 8, 201598. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial | Source | Orientation | Preamplifier |
|---|---|---|---|
| 1 | Ramp signal | 0° | Triton |
| 2 | Ramp signal | 90° | Triton |
| 3 | Ramp signal | 180° | Triton |
| 4 | Ramp signal | H | Triton |
| 5 | Ramp signal | 0° | Homemade |
| 6 | Ramp signal | 90° | Homemade |
| 7 | Ramp signal | 180° | Homemade |
| 8 | Ramp signal | H | Homemade |
| 9 | Multitone signal | 0° | Triton |
| 10 | Multitone signal | 90° | Triton |
| 11 | Multitone signal | 180° | Triton |
| 12 | Multitone signal | H | Triton |
| 13 | Multitone signal | 0° | Homemade |
| 14 | Multitone signal | 90° | Homemade |
| 15 | Multitone signal | 180° | Homemade |
| 16 | Multitone signal | H | Homemade |
| 17 | Environmental noise | 0° | Triton |
| 18 | Environmental noise | 0° | Homemade |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Marco, R.; Di Nardo, F.; Lucchetti, A.; Virgili, M.; Petetta, A.; Li Veli, D.; Screpanti, L.; Bartolucci, V.; Scaradozzi, D. The Development of a Low-Cost Hydrophone for Passive Acoustic Monitoring of Dolphin’s Vocalizations. Remote Sens. 2023, 15, 1946. https://doi.org/10.3390/rs15071946
De Marco R, Di Nardo F, Lucchetti A, Virgili M, Petetta A, Li Veli D, Screpanti L, Bartolucci V, Scaradozzi D. The Development of a Low-Cost Hydrophone for Passive Acoustic Monitoring of Dolphin’s Vocalizations. Remote Sensing. 2023; 15(7):1946. https://doi.org/10.3390/rs15071946
Chicago/Turabian StyleDe Marco, Rocco, Francesco Di Nardo, Alessandro Lucchetti, Massimo Virgili, Andrea Petetta, Daniel Li Veli, Laura Screpanti, Veronica Bartolucci, and David Scaradozzi. 2023. "The Development of a Low-Cost Hydrophone for Passive Acoustic Monitoring of Dolphin’s Vocalizations" Remote Sensing 15, no. 7: 1946. https://doi.org/10.3390/rs15071946
APA StyleDe Marco, R., Di Nardo, F., Lucchetti, A., Virgili, M., Petetta, A., Li Veli, D., Screpanti, L., Bartolucci, V., & Scaradozzi, D. (2023). The Development of a Low-Cost Hydrophone for Passive Acoustic Monitoring of Dolphin’s Vocalizations. Remote Sensing, 15(7), 1946. https://doi.org/10.3390/rs15071946