
BPG-Based Lossy Compression of Three-Channel Noisy Images with Prediction of Optimal Operation Existence and Its Parameters




Abstract
1. Introduction
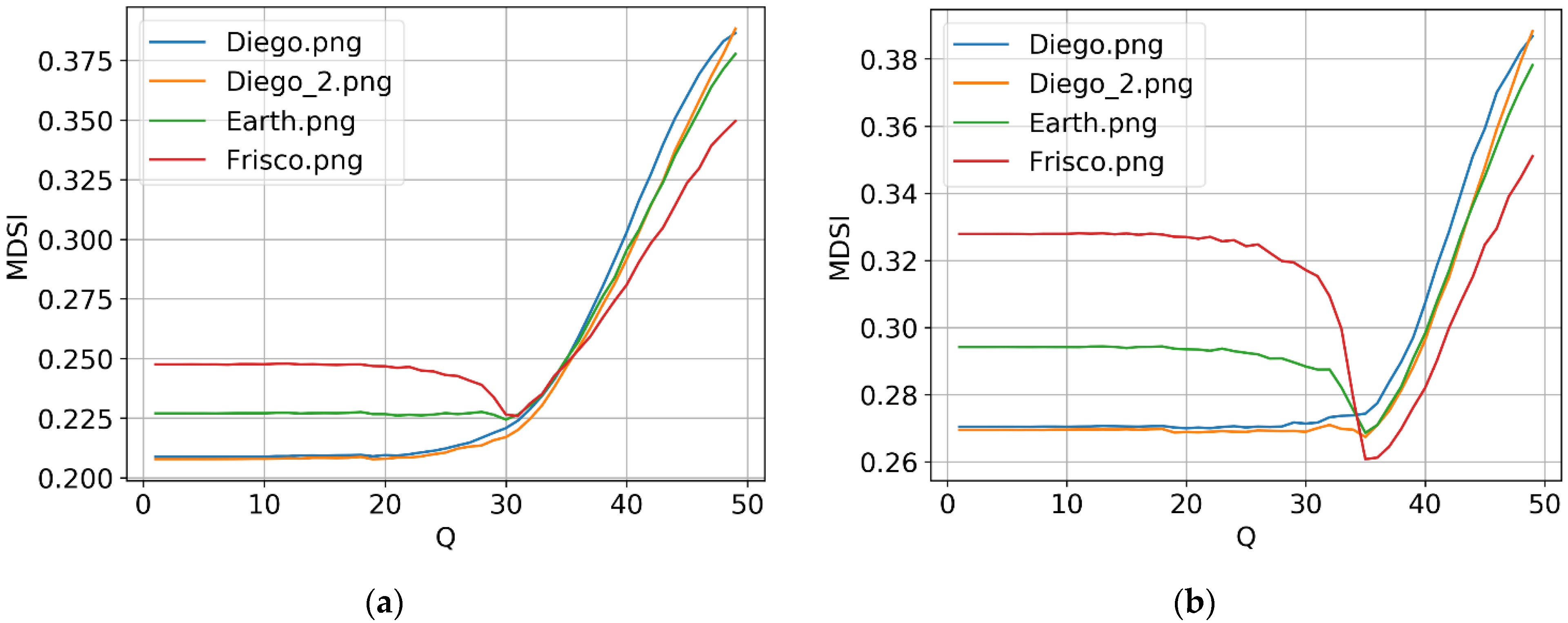
2. Image/Noise Model and Behavior of Compression Efficiency Criteria
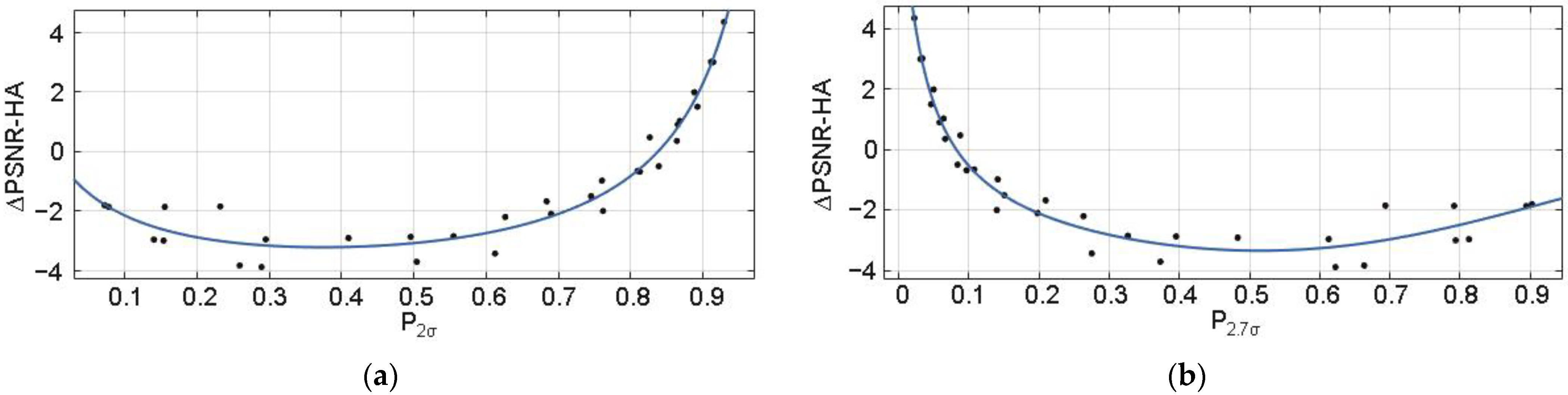
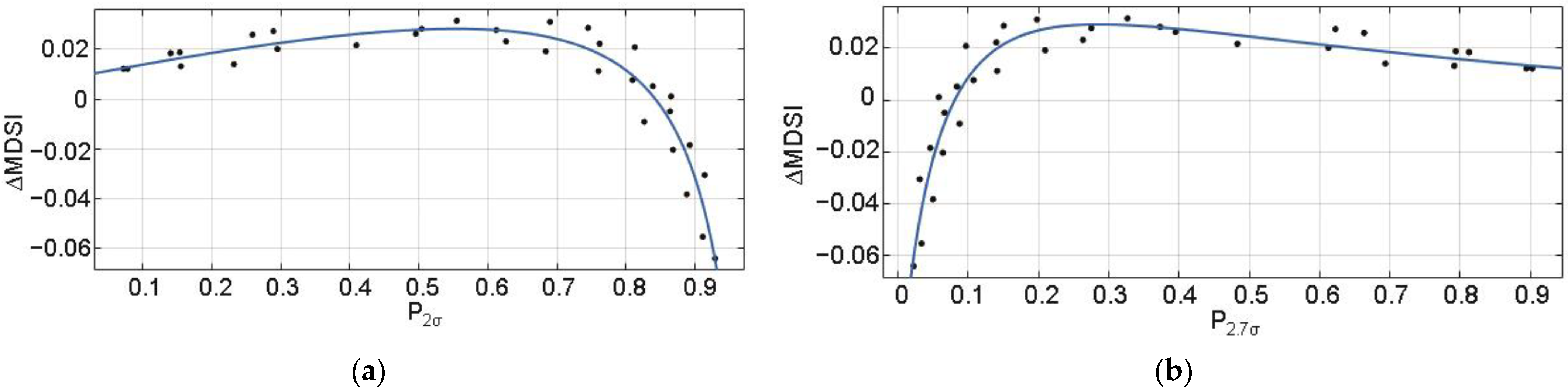
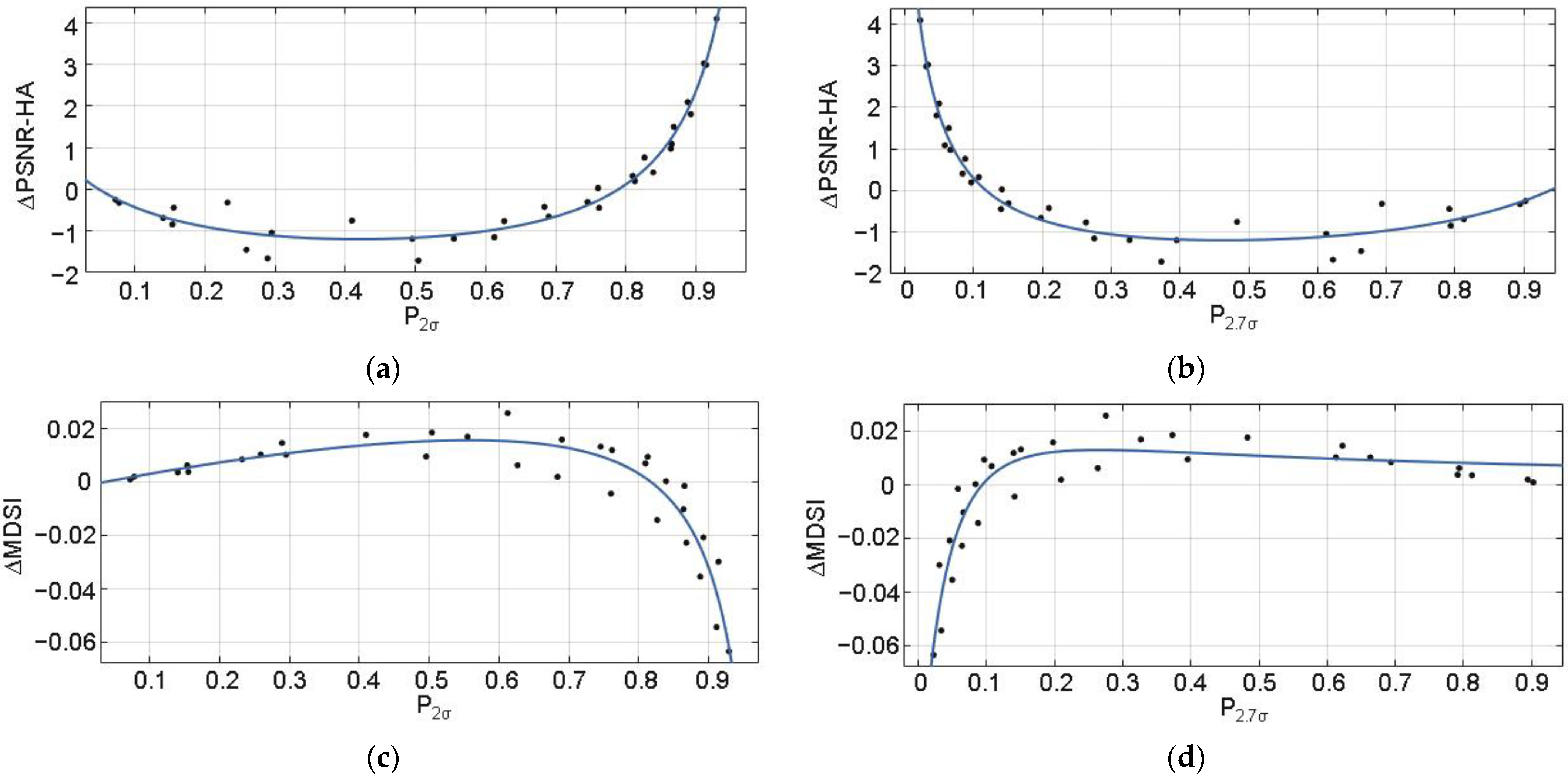
3. Prediction of OOP Existence and Parameters in It
4. Decision Undertaking and Other Practical Aspects
4.1. Prediction Verification and Additional Accuracy Analysis
4.2. Visual Analysis and Decision Undertaking
- (1)
- If , the OOP exists with high probability; then use QOOP (3);
- (2)
- If , consider that the OOP might exist and use Q = QOOP − 1, this allows avoiding image over-smoothing;
- (3)
- If ≤ −1 dB, use max{Q = QOOP − 3, 25} to have invisible distortions, or, at least, distortions that are not annoying (note that in [40] it was recommended to use Q = 29 for analogous case).
4.3. Comparison of Image Compression for Different Formats
4.4. Discussion of Practical Aspects
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mielke, C.; Boshce, N.K.; Rogass, C.; Segl, K.; Gauert, C.; Kaufmann, H. Potential Applications of the Sentinel-2 Multispectral Sensor and the ENMAP hyperspectral Sensor in Mineral Exploration. EARSeL eProceedings 2014, 13, 93–102. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Kolotii, A.; Skakun, S.; Rakoid, O.; Shumilo, L. A workflow for Sustainable Development Goals indicators assessment based on High-Resolution Satellite Data. Int. J. Digit. Earth 2020, 13, 309–321. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T.A.; et al. A Review of the Application of Optical and Radar Remote Sensing Data Fusion to Land Use Mapping and Monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- Khorram, S.; van der Wiele, C.F.; Koch, F.H.; Nelson, S.A.C.; Potts, M.D. Future Trends in Remote Sensing. In Principles of Applied Remote Sensing; Springer International Publishing: Cham, Switzerland, 2016; pp. 277–285. [Google Scholar]
- Pillai, D.K. New Computational Models for Image Remote Sensing and Big Data. In Big Data Analytics for Satellite Image Processing and Remote Sensing; IGI Global: Hershey, PA, USA, 2018; pp. 1–21. [Google Scholar]
- Blanes, I.; Magli, E.; Serra-Sagrista, J. A Tutorial on Image Compression for Optical Space Imaging Systems. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–26. [Google Scholar] [CrossRef]
- Chow, K.; Tzamarias, D.E.O.; Blanes, I.; Serra-Sagristà, J. Using Predictive and Differential Methods with K2-Raster Compact Data Structure for Hyperspectral Image Lossless Compression. Remote Sens. 2019, 11, 2461. [Google Scholar] [CrossRef]
- Radosavljevic, M.; Brkljac, B.; Lugonja, P.; Crnojevic, V.; Trpovski, Ž.; Xiong, Z.; Vukobratovic, D. Lossy Compression of Multispectral Satellite Images with Application to Crop Thematic Mapping: A HEVC Comparative Study. Remote Sens. 2020, 12, 1590. [Google Scholar] [CrossRef]
- Yu, G.; Vladimirova, T.; Sweeting, M.N. Image Compression Systems on Board Satellites. Acta Astronaut. 2009, 64, 988–1005. [Google Scholar] [CrossRef]
- Santos, L.; Lopez, S.; Cali, G.M.; Lopez, J.F.; Sarmiento, R. Performance Evaluation of the H.264/AVC Video Coding Standard for Lossy Hyperspectral Image Compression. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 451–461. [Google Scholar] [CrossRef]
- Penna, B.; Tillo, T.; Magli, E.; Olmo, G. Transform Coding Techniques for Lossy Hyperspectral Data Compression. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1408–1421. [Google Scholar] [CrossRef]
- Christophe, E. Hyperspectral Data Compression Tradeoff. In Optical Remote Sensing; Prasad, S., Bruce, L.M., Chanussot, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 9–29. [Google Scholar]
- Ozah, N.; Kolokolova, A. Compression Improves Image Classification Accuracy. In Advances in Artificial Intelligence; Meurs, M.-J., Rudzicz, F., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2019; Volume 11489, pp. 525–530. [Google Scholar]
- Chen, Z.; Hu, Y.; Zhang, Y. Effects of Compression on Remote Sensing Image Classification Based on Fractal Analysis. IEEE Trans. Geosci. Remote Sensing 2019, 57, 4577–4590. [Google Scholar] [CrossRef]
- Vasilyeva, I.; Li, F.; Abramov, S.K.; Lukin, V.V.; Vozel, B.; Chehdi, K. Lossy Compression of Three-Channel Remote Sensing Images with Controllable Quality. In Proceedings of the Image and Signal Processing for Remote Sensing XXVII, Madrid, Spain, 13–18 September 2021; Bruzzone, L., Bovolo, F., Benediktsson, J.A., Eds.; SPIE: Bellingham, WA, USA, 2021; p. 26. [Google Scholar]
- Yang, K.; Jiang, H. Optimized-SSIM Based Quantization in Optical Remote Sensing Image Compression. In Proceedings of the 2011 Sixth International Conference on Image and Graphics, Hefei, China, 12–15 August 2011; IEEE: New York, NY, USA, 2011; pp. 117–122. [Google Scholar]
- Li, F.; Lukin, V.; Ieremeiev, O.; Okarma, K. Quality Control for the BPG Lossy Compression of Three-Channel Remote Sensing Images. Remote Sens. 2022, 14, 1824. [Google Scholar] [CrossRef]
- Nafchi, H.Z.; Shahkolaei, A.; Hedjam, R.; Cheriet, M. Mean Deviation Similarity Index: Efficient and Reliable Full-Reference Image Quality Evaluator. IEEE Access 2016, 4, 5579–5590. [Google Scholar] [CrossRef]
- Ponomarenko, N.; Ieremeiev, O.; Lukin, V.; Egiazarian, K.; Carli, M. Modified Image Visual Quality Metrics for Contrast Change and Mean Shift Accounting. In Proceedings of the CADSM, Polyana-Svalyava, Ukraine, 23–25 February 2011; pp. 305–311. [Google Scholar]
- Ieremeiev, O.; Lukin, V.; Okarma, K.; Egiazarian, K. Full-Reference Quality Metric Based on Neural Network to Assess the Visual Quality of Remote Sensing Images. Remote Sens. 2020, 12, 2349. [Google Scholar] [CrossRef]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; Optical Science and Engineering; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Mullissa, A.G.; Persello, C.; Tolpekin, V. Fully Convolutional Networks for Multi-Temporal SAR Image Classification. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Italy, 22–27 July 2018; pp. 6635–6638. [Google Scholar]
- Zhong, P.; Wang, R. Multiple-Spectral-Band CRFs for Denoising Junk Bands of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2260–2275. [Google Scholar] [CrossRef]
- Bausys, R.; Kazakeviciute-Januskeviciene, G. Qualitative Rating of Lossy Compression for Aerial Imagery by Neutrosophic WASPAS Method. Symmetry 2021, 13, 273. [Google Scholar] [CrossRef]
- Du, Q.; Fowler, J.E. Hyperspectral Image Compression Using JPEG2000 and Principal Component Analysis. IEEE Geosci. Remote Sens. Lett. 2007, 4, 201–205. [Google Scholar] [CrossRef]
- Wang, W.; Zhong, X.; Su, Z. On-Orbit Signal-to-Noise Ratio Test Method for Night-Light Camera in Luojia 1–01 Satellite Based on Time-Sequence Imagery. Sensors 2019, 19, 4077. [Google Scholar] [CrossRef]
- Chang, S.G.; Yu, B.; Vetterli, M. Image Denoising via Lossy Compression and Wavelet Thresholding. In Proceedings of the International Conference on Image Processing, Computer Society, Santa Barbara, CA, USA, 26–29 October 1997; Volume 1, pp. 604–607. [Google Scholar]
- Al-Shaykh, O.K.; Mersereau, R.M. Lossy Compression of Noisy Images. IEEE Trans. on Image Process. 1998, 7, 1641–1652. [Google Scholar] [CrossRef]
- Wei, D.; Odegard, J.E.; Guo, H.; Lang, M.; Burrus, C.S. Simultaneous Noise Reduction and SAR Image Data Compression Using Best Wavelet Packet Basis. In Proceedings of the IEEE International Conference on Image Processing, Washington, DC, USA, 23–26 October 1995; pp. 200–203. [Google Scholar]
- Odegard, J.E.; Guo, H.; Burrus, C.S.; Baraniuk, R.G. Joint Compression and Speckle Reduction of SAR Images Using Embedded Zero-tree Models. In Proceedings of the Workshop on Image and Multidimensional Signal Processing, Belize City, Belize, 3–6 March 1996; pp. 80–81. [Google Scholar]
- Ponomarenko, N.; Silvestri, F.; Egiazarian, K.; Carli, M.; Astola, J.; Lukin, V. On Between-Corfficient Contrast Masking of DCT Basis Functions. In Proceedings of the Third International Workshop on Video Processing and Quality Metrics for Consumer Electronics, Scottsdale, AZ, USA, 25–26 January 2007; p. 4. [Google Scholar]
- Zhang, L.; Zhang, L.; Mou, X.; Zhang, D. FSIM: A Feature Similarity Index for Image Quality Assessment. IEEE Trans. Image Process. 2011, 20, 2378–2386. [Google Scholar] [CrossRef] [PubMed]
- Wallace, G. The JPEG Still Picture Compression Standard. Commun. ACM 1991, 34, 30–44. [Google Scholar] [CrossRef]
- Bondžulić, B.; Stojanović, N.; Petrović, V.; Pavlović, B.; Miličević, Z. Efficient Prediction of the First Just Noticeable Difference Point for JPEG Compressed Images. Acta Polytech. Hung. 2021, 18, 201–220. [Google Scholar] [CrossRef]
- Taubman, D.S.; Marcellin, M.W. JPEG2000: Image Compression Fundamentals, Standards, And Practice; Kluwer Academic Publishers: Boston, MA, USA, 2002; p. 779. [Google Scholar]
- Zemliachenko, A.N.; Abramov, S.K.; Lukin, V.V.; Vozel, B.; Chehdi, K. Lossy Compression of Noisy Remote Sensing Images with Prediction of Optimal Operation Point Existence and Parameters. J. Appl. Remote Sens. 2015, 9, 095066. [Google Scholar] [CrossRef]
- BPG Image Format. Available online: https://bellard.org/bpg/ (accessed on 29 December 2022).
- Yee, D.; Soltaninejad, S.; Hazarika, D.; Mbuyi, G.; Barnwal, R.; Basu, A. Medical Image Compression Based on Region of Interest Using Better Portable Graphics (BPG). In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 216–221. [Google Scholar]
- Lukin, V.; Ponomarenko, N.; Zelensky, A.; Kurekin, A.; Lever, K. Classification of Compressed Multichannel Remote Sensing Images. In Proceedings of the Image and Signal Processing for Remote Sensing XIV, Cardiff, Wales, UK, 15–18 September 2008; Volume 7109, p. 12. [Google Scholar]
- Kovalenko, B.; Lukin, V.; Kryvenko, S.; Naumenko, V.; Vozel, B. BPG-Based Automatic Lossy Compression of Noisy Images with the Prediction of an Optimal Operation Existence and Its Parameters. Appl. Sci. 2022, 12, 7555. [Google Scholar] [CrossRef]
- Ponomarenko, N.; Lukin, V.; Zriakhov, M.; Egiazarian, K.; Astola, J. Lossy Compression of Images with Additive Noise. In Advanced Concepts for Intelligent Vision Systems; Blanc-Talon, J., Philips, W., Popescu, D., Scheunders, P., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3708, pp. 381–386. [Google Scholar]
- Ponomarenko, N.; Zriakhov, M.; Lukin, V.V.; Astola, J.T.; Egiazarian, K.O. Estimation of Accessible Quality in Noisy Image Compression. In Proceedings of the 2006 14th European Signal Processing Conference, Florence, Italy, 4–8 September 2006; pp. 1–4. [Google Scholar]
- Lukin, V.; Zemliachenko, A.; Abramov, S.; Vozel, B.; Chehdi, K. Automatic Lossy Compression of Noisy Images by Spiht or Jpeg2000 in Optimal Operation Point Neighborhood. In Proceedings of the 2016 6th European Workshop on Visual Information Processing (EUVIP), Marseille, France, 25–27 October 2016; pp. 1–6. [Google Scholar]
- Zemliachenko, A.; Kozhemiakin, R.; Uss, M.; Abramov, S.; Ponomarenko, N.; Lukin, V.; Vozel, B.; Chehdi, K. Lossy Compression of Hyperspectral Images Based on Noise Parameters Estimation and Variance Stabilizing Transform. J. Appl. Remote Sens. 2014, 8, 25. [Google Scholar] [CrossRef]
- Lukin, V.; Krivenko, S.; Zriakhov, M.; Ponomarenko, N.; Abramov, S.; Kaarna, A.; Egiazarian, K. Lossy Compression of Images Corrupted By Mixed Poisson And Additive Noise. In Proceedings of the LNLA, Helsinki, Finland, 19–21 August 2009; pp. 33–40. [Google Scholar]
- Kovalenko, B.; Lukin, V.; Naumenko, V.; Krivenko, S. Analysis of Noisy Image Lossy Compression by BPG Using Visual Quality Metrics. In Proceedings of the 2021 IEEE 3rd International Conference on Advanced Trends in Information Theory (ATIT), Kyiv, Ukraine, 15 December 2021; pp. 20–25. [Google Scholar]
- Kozhemiakin, R.; Abramov, S.; Lukin, V.; Djurović, I.; Vozel, B. Peculiarities of 3D Compression of Noisy Multichannel Images. In Proceedings of the MECO, Budva, Montenegro, 14–18 June 2015; pp. 331–334. [Google Scholar]
- Pogrebnyak, O.; Lukin, V.V. Wiener Discrete Cosine Transform-Based Image Filtering. J. Electron. Imaging 2012, 21, 043020. [Google Scholar] [CrossRef]
- Rubel, O.; Lukin, V. An Improved Prediction of DCT-Based Filters Efficiency Using Regression Analysis. Inf. Telecommun. Sci. 2014, 5, 30–41. [Google Scholar] [CrossRef]
- Chatterjee, P.; Milanfar, P. Is Denoising Dead? IEEE Trans. Image. Process. 2010, 19, 895–911. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Zhang, B.; Fadili, M.J.; Starck, J.-L. Multi-Scale Variance Stabilizing Transform for Multi-Dimensional Poisson Count Image Denoising. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing, Toulouse, France, 14–19 May 2006; p. 4. [Google Scholar] [CrossRef]
- Colom, M.; Buades, A.; Morel, J.-M. Nonparametric Noise Estimation Method for Raw Images. J. Opt. Soc. Am. A 2014, 31, 863–871. [Google Scholar] [CrossRef] [PubMed]
- Uss, M.; Vozel, B.; Lukin, V.; Abramov, S.; Baryshev, I.; Chehdi, K. Image Informative Maps for Estimating Noise Standard Deviation and Texture Parameters. EURASIP J. Adv. Signal Process. 2011, 2011, 806516. [Google Scholar] [CrossRef]
- Pyatykh, S.; Hesser, J. Image Sensor Noise Parameter Estimation by Variance Stabilization and Normality Assessment. IEEE Trans. Image Process. 2014, 23, 3990–3998. [Google Scholar] [CrossRef]
- Zhai, G.; Min, X. Perceptual image quality assessment: A survey. Sci. China Inf. Sci. 2020, 63, 1–52. [Google Scholar] [CrossRef]
- Ponomarenko, N.; Lukin, V.; Astola, J.; Egiazarian, K. Analysis of HVS-metrics’ properties using color image database TID2013. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Catania, Italy, 26–29 October 2016; pp. 613–624. [Google Scholar]
- Kovalenko, B.; Lukin, V. Analysis of Color Image Compression by BPG Coder. In Proceedings of the 2022 IEEE 3rd KhPI Week on Advanced Technology (KhPIWeek), Kharkiv, Ukraine, 3–7 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Z.; Simoncelli, E.P.; Bovik, A.C. Multiscale Structural Similarity for Image Quality Assessment. In Proceedings of the Thirty-Seventh Asilomar Conference on Signals, Systems & Computers, 2003, Pacific Grove, CA, USA, 9–12 November 2003; pp. 1398–1402. [Google Scholar]
- Kovalenko, B.; Lukin, V. Usage of Different Chroma Subsampling Modes in Image Compression by BPG Coder. Ukr. J. Remote Sens. 2022, 9, 11–16. [Google Scholar] [CrossRef]
- Cameron, C.A.; Windmeijer, F.A.G. An R-Squared Measure of Goodness of Fit for Some Common Nonlinear Regression Models. J. Econom. 1997, 77, 329–342. [Google Scholar] [CrossRef]
- Yang, Y.; Newsam, S. Bag-Of-Visual-Words and Spatial Extensions for Land-Use Classification. In Proceedings of the ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems (ACM GIS), San Jose, CA, USA, 2–5 November 2010; pp. 270–279. [Google Scholar] [CrossRef]
- Lukac, R.; Plataniotis, K.N. (Eds.) Color Image Processing: Methods and Applications. In Image Processing Series; CRC/Taylor & Francis: Boca Raton, FL, USA, 2007; p. 600. [Google Scholar] [CrossRef]
- Sendur, L.; Selesnick, I.W. Bivariate shrinkage with local variance estimation. IEEE Signal Process. Lett. 2002, 9, 438–441. [Google Scholar] [CrossRef]
- Liu, X.; Tanaka, M.; Okutomi, M. Noise Level Estimation Using Weak Textured Patches of a Single Noisy Image. In Proceedings of the 19th IEEE International Conference on Image Processing, Orlando, FL, USA, 30 September–3 October 2012; pp. 665–668. [Google Scholar] [CrossRef]
- Alparone, L.; Selva, M.; Aiazzi, B.; Baronti, S.; Butera, F.; Chiarantini, L. Signal-Dependent Noise Modelling and Estimation of New-Generation Imaging Spectrometers. In Proceedings of the First Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing, Grenoble, France, 6–28 August 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Meola, J.; Eismann, M.T.; Moses, R.L.; Ash, J.N. Modeling and Estimation of Signal-Dependent Noise in Hyperspectral Imagery. Appl. Opt. 2011, 50, 3829–3846. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dependence | Expression | Parameters | R2 | Adjusted R2 | RMSE |
|---|---|---|---|---|---|
| on (4:4:4) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = 1.195 × 105 p2 = −1.003 × 105 p3 = 147.4 q1 = −1.92 × 104 q2 = 1.778 × 104 q3 = 2454 | 0.9530 | 0.944 | 0.5143 |
| on (4:4:4) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = 3.114 p2 = −4.159 p3 = 0.3203 q1 = −1.482 q2 = 1.015 q3 = 0.03138 | 0.9539 | 0.945 | 0.5094 |
| on (4:4:4) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = −36.59 p2 = 25.2 p3 = 4.732 q1 = −59.71 q2 = −478.2 q3 = 547.8 | 0.9154 | 0.8991 | 0.007974 |
| on (4:4:4) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = −61.94 p2 = 110.5 p3 = −8.54 q1 = 2341 q2 = 1243 q3 = 71.58 | 0.9036 | 0.885 | 0.008512 |
| on (4:2:2) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = 4.964 × 104 p2 = −4.162 × 104 p3 = 1942 q1 = −1.602 × 104 q2 = 1.342 × 104 q3 = 2861 | 0.965 | 0.9582 | 0.2938 |
| on (4:2:2) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = −5.772 × 104 p2 = 6.093 × 104 p3 = −6402 q1 = 2.003 × 104 q2 = −2.481 × 104 q3 = −717.6 | 0.9623 | 0.9551 | 0.3048 |
| on (4:2:2) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = −25.17 p2 = 21.54 p3 = −0.8092 q1 = −152 q2 = −256 q3 = 408.8 | 0.8778 | 0.8543 | 0.007885 |
| on (4:2:2) | f(x) = (p1 × x + p2)/(x2 + q1 × x + q2) | p1 = 0.008652 p2 = −0.0008153 q1 = 0.1452 q2 = 0.00661 | 0.853 | 0.8372 | 0.008334 |
| on (4:2:0) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = 6922 p2 = −5483 p3 = 243.9 q1 = −4101 q2 = 3003 q3 = 1025 | 0.9869 | 0.9843 | 0.1482 |
| on (4:2:0) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = 2.433 p2 = −2.668 p3 = 0.3562 q1 = −2.571 q2 = 2.324 q3 = 0.02283 | 0.9844 | 0.9814 | 0.1615 |
| on (4:2:0) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = −12.84 p2 = 11.17 p3 = −0.7154 q1 = −86.94 q2 = −255.8 q3 = 334.8 | 0.8558 | 0.8281 | 0.007658 |
| on (4:2:0) | f(x) = (p1 × x2 + p2 × x + p3)/(x3 + q1 × x2 + q2 × x + q3) | p1 = −0.4441 p2 = 0.4425 p3 = −0.04341 q1 = −10.63 q2 = 21.37 q3 = 0.05467 | 0.8431 | 0.813 | 0.007988 |
| Image | Format | Input Parameter | Predicted | Calculated | Predicted | Calculated |
|---|---|---|---|---|---|---|
| Woodland Hills | 4:4:4 | −1.7 | −1.8 | 0.021 | 0.033 | |
| −1.64 | 0.023 | |||||
| Point Loma | 4:4:4 | 2.2 | 1.8 | −0.031 | −0.018 | |
| 2.52 | −0.037 | |||||
| Foster City | 4:4:4 | 0.53 | 0.97 | −0.006 | −0.024 | |
| 0.53 | −0.008 | |||||
| Shelter Island | 4:4:4 | −0.29 | −0.74 | 0.005 | 0.008 | |
| −0.29 | 0.005 | |||||
| Woodland Hills | 4:2:2 | −0.42 | −0.52 | 0.01 | 0.019 | |
| −0.43 | 0.01 | |||||
| Point Loma | 4:2:2 | 2.31 | 2.16 | −0.031 | −0.019 | |
| 2.6 | −0.037 | |||||
| Foster City | 4:2:2 | 1.04 | 1.6 | −0.011 | −0.023 | |
| 1.08 | −0.011 | |||||
| Shelter Island | 4:2:2 | 0.48 | 0.18 | −0.002 | 0.01 | |
| 0.48 | −0.001 | |||||
| Woodland Hills | 4:2:0 | −0.02 | −0.12 | 0.005 | 0.012 | |
| −0.02 | 0.005 | |||||
| Point Loma | 4:2:0 | 2.18 | 2.09 | −0.029 | −0.016 | |
| 2.45 | −0.033 | |||||
| Foster City | 4:2:0 | 1.06 | 1.57 | −0.011 | −0.021 | |
| 1.09 | −0.01 | |||||
| Shelter Islands | 4:2:0 | 0.62 | 0.47 | −0.004 | 0.007 | |
| 0.62 | −0.004 |
| Q | Format | PSNRtc | PSNR-HAtc | MDSItc | CR |
|---|---|---|---|---|---|
| 33 | 4:4:4 | 32.08 | 35.01 | 0.239 | 33.05 |
| 4:2:2 | 31.41 | 34.19 | 0.239 | 42.15 | |
| 4:2:0 | 31.05 | 33.63 | 0.240 | 46.29 | |
| Component-wise | 29.21 | 33.46 | 0.260 | 7.25 | |
| 35 | 4:4:4 | 31.55 | 34.23 | 0.249 | 51.49 |
| 4:2:2 | 30.83 | 33.27 | 0.249 | 62.20 | |
| 4:2:0 | 30.51 | 32.74 | 0.249 | 66.76 | |
| Component-wise | 31.37 | 34.62 | 0.238 | 15.78 |
| Q | Format | Mean PSNRtc | Minimal PSNRtc | Maximal PSNRtc |
|---|---|---|---|---|
| 33 | 4:4:4 | 35.43 | 31.94 | 41.27 |
| 4:2:2 | 35.25 | 31.83 | 41.01 | |
| 4:2:0 | 35.21 | 31.86 | 41.01 | |
| Component-wise | 29.34 | 28.52 | 30.16 | |
| 35 | 4:4:4 | 34.90 | 31.15 | 40.99 |
| 4:2:2 | 34.66 | 31.08 | 40.52 | |
| 4:2:0 | 34.65 | 31.02 | 40.60 | |
| Component-wise | 32.61 | 29.57 | 36.68 |
| Q | Format | Mean PSNR-HAtc | Minimal PSNR-HAtc | Maximal PSNR-HAtc |
|---|---|---|---|---|
| 33 | 4:4:4 | 36.75 | 34.70 | 41.35 |
| 4:2:2 | 36.59 | 34.64 | 41.17 | |
| 4:2:0 | 36.60 | 34.70 | 41.17 | |
| Component-wise | 34.13 | 33.48 | 35.05 | |
| 35 | 4:4:4 | 36.03 | 33.81 | 40.78 |
| 4:2:2 | 35.86 | 33.76 | 40.81 | |
| 4:2:0 | 35.85 | 33.72 | 40.64 | |
| Component-wise | 35.48 | 33.81 | 38.71 |
| Q | Format | Mean MDSItc | Minimal MDSItc | Maximal MDSItc |
|---|---|---|---|---|
| 33 | 4:4:4 | 0.290 | 0.246 | 0.320 |
| 4:2:2 | 0.290 | 0.246 | 0.321 | |
| 4:2:0 | 0.290 | 0.247 | 0.321 | |
| Component-wise | 0.360 | 0.337 | 0.381 | |
| 35 | 4:4:4 | 0.299 | 0.252 | 0.333 |
| 4:2:2 | 0.299 | 0.252 | 0.332 | |
| 4:2:0 | 0.299 | 0.253 | 0.332 | |
| Component-wise | 0.303 | 0.269 | 0.325 |
| Q | Format | Mean CR | Minimal CR | Maximal CR |
|---|---|---|---|---|
| 33 | 4:4:4 | 106.1 | 25.5 | 382.3 |
| 4:2:2 | 114.9 | 25.8 | 422.5 | |
| 4:2:0 | 115.8 | 25.9 | 410.7 | |
| Component-wise | 7.9 | 5.8 | 10.4 | |
| 35 | 4:4:4 | 176.3 | 35.7 | 683.0 |
| 4:2:2 | 185.2 | 36.0 | 729.2 | |
| 4:2:0 | 189.9 | 36.2 | 756.1 | |
| Component-wise | 14.3 | 5.59 | 33.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovalenko, B.; Lukin, V.; Vozel, B. BPG-Based Lossy Compression of Three-Channel Noisy Images with Prediction of Optimal Operation Existence and Its Parameters. Remote Sens. 2023, 15, 1669. https://doi.org/10.3390/rs15061669
Kovalenko B, Lukin V, Vozel B. BPG-Based Lossy Compression of Three-Channel Noisy Images with Prediction of Optimal Operation Existence and Its Parameters. Remote Sensing. 2023; 15(6):1669. https://doi.org/10.3390/rs15061669
Chicago/Turabian StyleKovalenko, Bogdan, Vladimir Lukin, and Benoit Vozel. 2023. "BPG-Based Lossy Compression of Three-Channel Noisy Images with Prediction of Optimal Operation Existence and Its Parameters" Remote Sensing 15, no. 6: 1669. https://doi.org/10.3390/rs15061669
APA StyleKovalenko, B., Lukin, V., & Vozel, B. (2023). BPG-Based Lossy Compression of Three-Channel Noisy Images with Prediction of Optimal Operation Existence and Its Parameters. Remote Sensing, 15(6), 1669. https://doi.org/10.3390/rs15061669